Настоящее изобретение относится к оптическим способам определения взаимного положения и взаимной ориентации объектов и замкнутым телевизионным системам, в которых сигнал не используется для широкого вещания.
Способы определения взаимного положения и управления объектами в оптическом диапазоне имеют ряд преимуществ перед способами в радиодиапазоне.
Например, более высокая точность, пространственная развязка при работе с группой объектов на одной длине волны, что дает возможность многократного использования одного и того же участка спектра.
Областями применения таких способов и устройств являются как научная, так и прикладная (производственная, транспортная) деятельность.
При определении взаимных координат объектов при монтажных операциях, операциях управления буксируемыми, стыкуемыми или перемещающимися в группе объектами успешно применяются способы и устройства, работающие в оптическом диапазоне.
По мере перехода от решения задачи взаимной навигации для двух объектов к задаче управления группой объектов требования к точности и надежности упомянутых способов и устройств возрастают, и поэтому более широкое применение находят телевизионные способы и устройства, которые подразделяются на системы стереозрения и на системы с активными или пассивными маркерами и одной телевизионной камерой.
Например, способ использования телевизионных камер для определения взаимного положения объектов в оптическом диапазоне посредством измерения углов, определяющих направление на оптические маркеры, установленные на наблюдаемых объектах, а при известной геометрии объекта (системы маркеров) - также расстояния до объекта и его ориентацию, предложенный в (Лопота А.В, Половко С.А., Степанов Д.Н., Торубаров А.А. Точное определение координат объектов по их телевизионным изображениям методом «встречных измерений». Труды XV Международной конференции «Проблемы управления и моделирования в сложных системах» (ПУМСС-2013), 25-28 июня 2013 года, г. Самара, с. 251-259).
К недостаткам этого способа относятся:
- трудность определения взаимного положения и управления группой объектов;
- снижение точности определения взаимного положения при взаимном рассогласовании осей ТВ камер, установленных на объектах;
- зависимость точности измерения взаимной дальности от размеров проекции комплекта маркеров на фотоматрицу телевизионной камеры.
Известен моностатический способ определения расстояния до объекта, его направления и скорости движения, описанный в патенте РФ №2340872 (опубл. 10.12.2008).
Способ состоит в определении расстояния до объекта при помощи фотоприемника (телевизионной камеры), включает измерение размера изображения объекта в плоскости фотоприемника, имеющего перестраиваемую оптическую систему с двумя известными граничными фокусными расстояниями, и по двум полученным разномасштабным изображениям определяют расстояние до объекта.
Направление и скорость движения объекта определяют путем сопоставления положения объекта на изображениях одного масштаба, полученных в текущем и предыдущем измерениях расстояния до объекта, выполненных через известный промежуток времени.
К недостаткам известного способа относятся:
- невозможность определения взаимного положения для управления группой перемещающихся объектов;
- невозможность определить ориентацию объекта в пространстве по углам поворота;
- снижение точности при относительно быстром перемещении объекта;
- низкая точность при большой дальности, что обусловлено малыми размерами изображения объекта на фотоприемнике.
Наиболее близким к заявляемому способу является способ определения взаимного положения объектов, описанный в патенте РФ №2468383 (опубл. 27.11.2012 г.), реализуемый с помощью измерительной системы, включающей установленный на первом объекте комплект оптических реперов, в который входят не менее трех излучателей, и установленный на другом объекте оптический измерительный комплект.
Мощность излучения каждого реперного оптического излучателя модулируют на отличной от других частоте повторения, периодически вырабатывая одновременно на всех частотах временные метки.
С помощью оптического измерительного комплекта определяют углы визирования каждого реперного оптического излучателя и разности между расстоянием до произвольно выбранного реперного излучателя и расстояниями до остальных реперных оптических излучателей, и по этим данным вычисляют параметры взаимного положения объектов.
Таким образом, достигается однозначное определение параметров взаимного расположения и взаимной ориентации двух объектов, минимизация требуемого для обеспечения однозначности числа реперных оптических излучателей, обеспечение возможности проведения измерений в условиях солнечной засветки измерительного приемника и повышение точности измерений при возникновении переотражений сигналов реперных излучателей от объектов.
Признаки настоящего изобретения, совпадающие с признаками прототипа:
- измерительную систему строят из комплекта реперных оптических излучателей, который устанавливают на первом объекте, и измерительного комплекта, который устанавливают на втором объекте;
- координаты реперных излучателей в системе координат первого объекта, положение и ориентация измерительного комплекта в системе координат второго объекта считают известными;
- измерительный комплект измеряет углы визирования оптических реперов;
- вычисление параметров взаимного положения (взаимной ориентации) объектов проводят с использованием результатов измерения углов визирования реперов и разности расстояний до реперов относительно друг друга.
К недостаткам способа-прототипа относятся:
- невозможность использования для определения взаимного положения и управления группой объектов с учетом траектории их движения;
- низкая точность измерений при малых углах взаимного отклонения объектов по тангажу и рысканию, особенно при малом расстоянии между ними, по причине малости разности расстояний до реперов относительно друг друга;
- трудность, а часто и невозможность использования в пространстве, ограниченном отражающими препятствиями, из-за наличия мешающих эхо-сигналов, вызванных излучателями реперов.
Технический результат заявляемого способа направлен на:
- определение взаимного положения и управление для группы объектов с учетом траектории их движения;
- повышение точности определения взаимного положения перемещающихся объектов;
- определение взаимного положения объектов как в открытом, так и ограниченном пространстве.
Это достигается тем, что способ определения взаимного положения и управления для группы перемещающихся объектов с измерением углов визирования комплекта оптических реперов одного объекта измерительным комплектом другого объекта, причем координаты комплекта оптических реперов, их взаимное положение, а также координаты и положение измерительного комплекта каждого объекта в его системе координат известны, ОТЛИЧАЕТСЯ ТЕМ, что упомянутые комплекты располагают на каждом объекте группы, устанавливая между ними отношение «ведущий» - «ведомый», осуществляют измерительными комплектами «ведомых» измерение углов визирования максимумов диаграмм суммарного излучения комплекта оптических реперов «ведущего», передают, модулируя излучение оптических реперов «ведущего», идентификационные номера «ведомых», их изображения и координаты мест в системе координат «ведущего», где должны находиться изображения «ведомых», установленные для конкретной группы, с учетом траектории ее перемещения и вычисляют параметры взаимного положения измерительным комплектом каждого «ведомого».
При этом параметры положения «ведомого» в группе определяют вычисляя взаимную корреляционную функцию между реальным изображением «ведомого» и его виртуальным изображением, заданным в системе координат «ведущего» с учетом траектории перемещения группы.
При этом «ведущий» передает «ведомым» параметры вектора скорости с учетом заданной траектории движения группы.
Сущность заявленного способа определения взаимного положения и управления для группы перемещающихся объектов поясняется описанием примера его реализации и чертежами, на которых представлены:
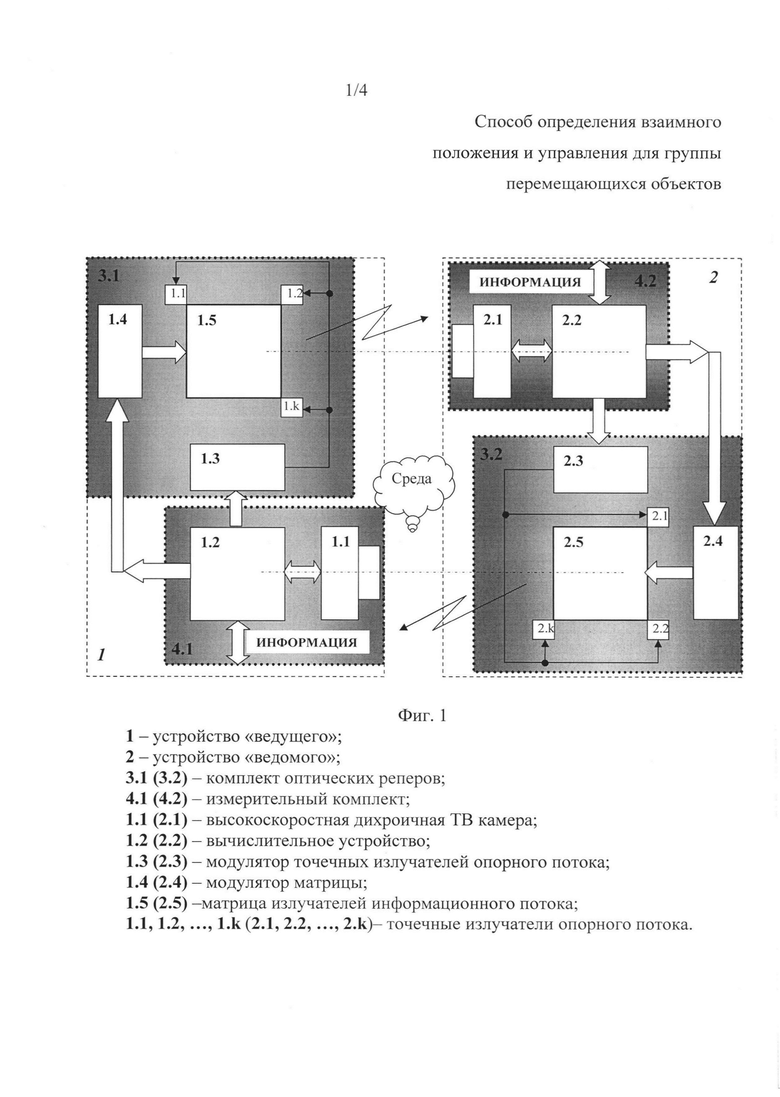
Фиг. 1 - функциональная схема устройства, реализующего способ;
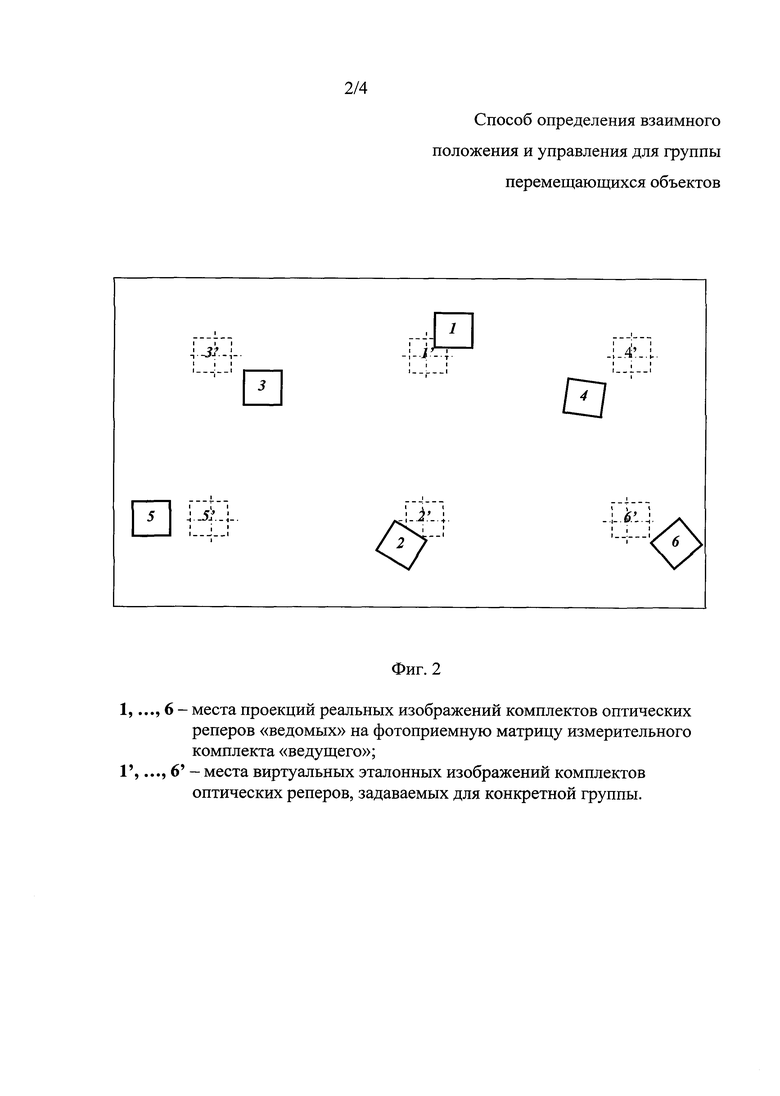
Фиг. 2 - вид проекций изображений комплектов оптических реперов «ведомых» на фотоприемную матрицу «ведущего» (формат матрицы 16:9);
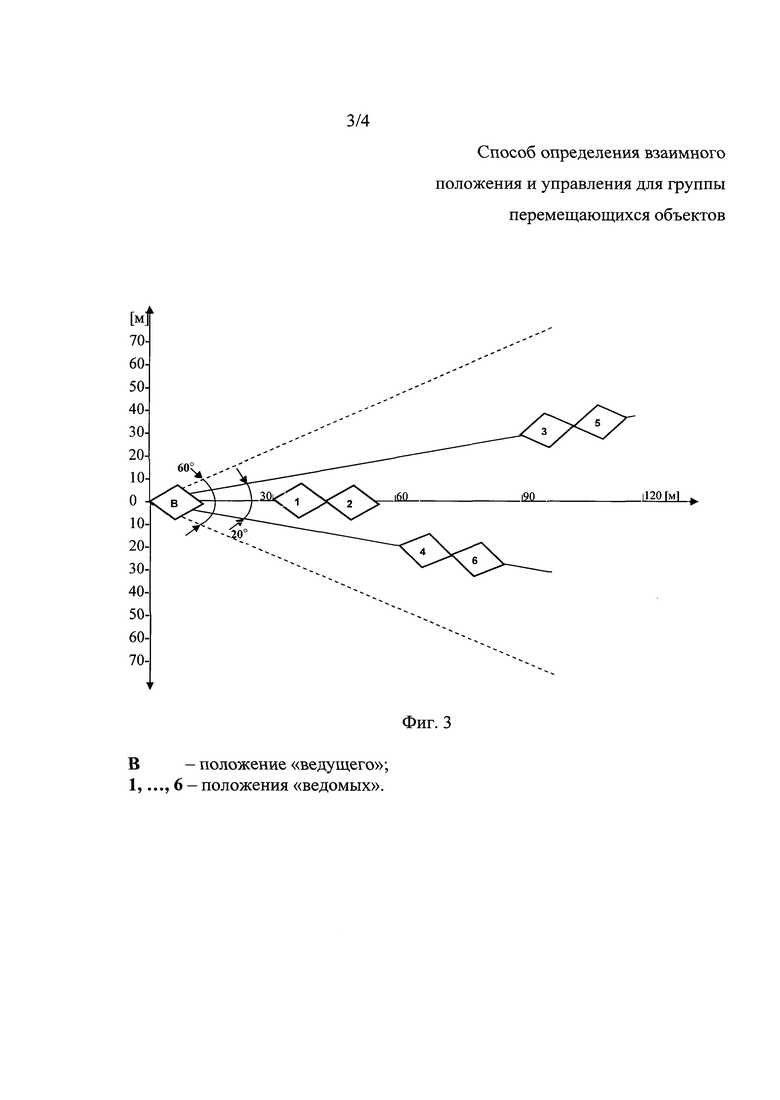
Фиг. 3 - вид сверху на положение в группе летящих «ведомых» объектов во главе с «ведущим»;
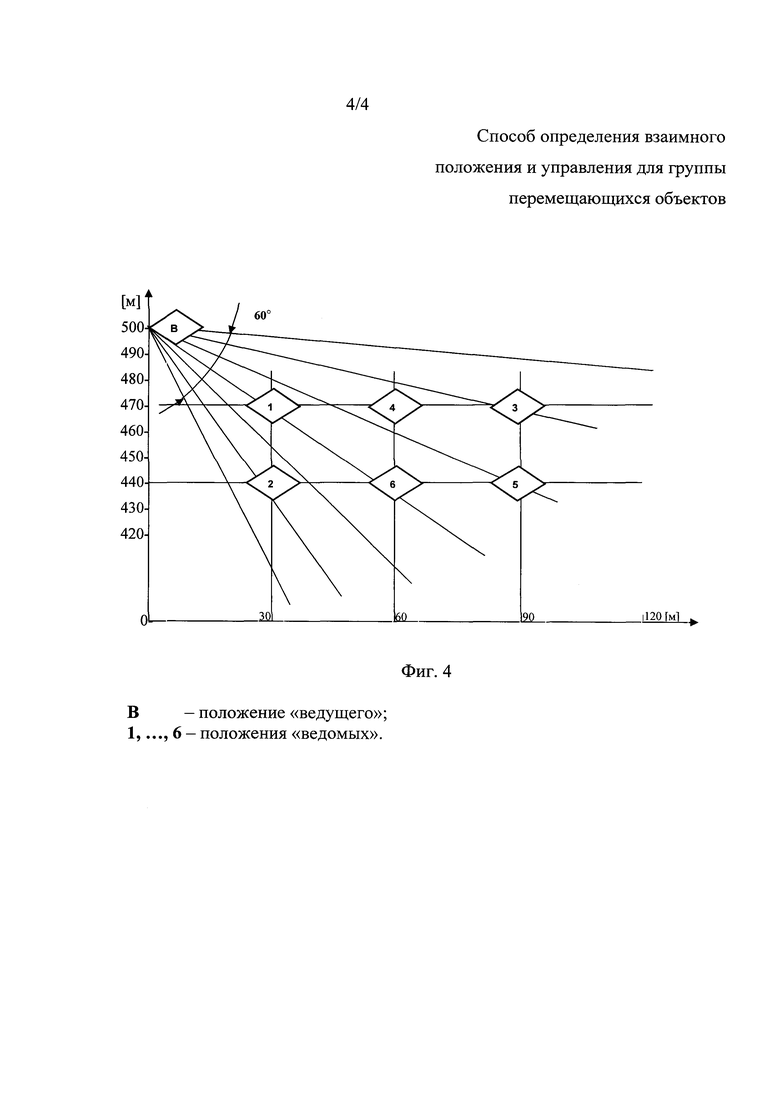
Фиг. 4 - вид сбоку на положение в группе летящих «ведомых» объектов во главе с «ведущим».
Схема устройства для определения взаимного положения и управления для группы перемещающихся объектов состоит (см. Фиг. 1) из двух одинаковых устройств, левое 1 расположено на объекте «ведущий», а правое 2 - на одном из «ведомых».
Каждое устройство состоит из комплекта оптических реперов 3.1, 3.2, включающего модулятор 1.3, 2.3 точечных излучателей опорного потока, матрицы 1.5 и 2.5 излучателей информационного потока и модулятора 1.4, 2.4 матрицы. Измерительный комплект включает высокоскоростную дихроичную телевизионную камеру 1.1, 2.1, чувствительную к составляющим пространственно совмещенного потока, состоящего из информационного и опорного потоков. Выход камеры 1.1, 2.1 соединен с вычислительным устройством (1.2, 2.2), обрабатывающим сигнал телевизионной камеры и реализующим протокол связи между «ведущим» и «ведомыми» и вычисляющим параметры положения «ведомого» с передачей их в его систему управления.
Угол поля зрения телевизионной камеры устройства «ведущего» выбирается так, чтобы видеть устройства всех «ведомых» в группе, а угол поля зрения телевизионных камер устройств «ведомых» выбран так, чтобы видеть только устройство «ведущего».
Точечные излучатели (1.1, …, 1.k и 2.2, …, 2.k) излучают опорный (синхронизирующий) поток с длиной волны λ1, матрица излучает информационный поток с длиной волны λ2, причем коэффициент ослабления оптической средой излучения с длиной волны λ1 устанавливается большим, чем коэффициент ослабления излучения с длиной волны λ2.
Так, например, для воздушной среды λ1 может быть выбрана в сине-зеленой области, а λ2 - в красной или ближней инфракрасной области.
Для морской воды λ1 может лежать в зелено-оранжевой области, а λ2 - в сине-зеленой. В этом случае, если устанавливается устойчивый прием и дешифрация синхронизирующего потока на принимающей стороне можно считать, что качество приема информационного потока будет не хуже, а может быть и лучше.
Это обстоятельство позволяет использовать для передачи информации изохронный режим, не содержащий во время передачи различных вставок, снижающих скорость передачи информации.
На Фиг. 2 показан вид проекций реальных изображений комплектов оптических реперов ведомых (1, …, 6) на фотоприемную матрицу измерительного комплекта «ведущего» и места (1', …, 6'), на которых должны были бы располагаться эти изображения, в случае занятия «ведомыми» мест, установленных для них в группе при совместном перемещении.
На Фиг 3 показан вид сверху этого же варианта взаимного расположения летательных аппаратов, например беспилотных (БПЛА), а на Фиг 4 - вид сбоку.
Начальное (исходное) расположение «ведущего» и «ведомых» определяется их автономными системами навигации и управления, которые должны обеспечить их взаимную оптическую связь с учетом установленных углов поля зрения.
После чего измерительные комплекты «ведомых» выполняют измерение углов визирования максимумов диаграммы суммарного излучения оптических реперов «ведущего». «Ведущий» передает, модулируя излучение своих опорных оптических реперов, каждому из «ведомых», их идентификационные номера, а также их изображение и координаты мест в системе координат «ведущего», где должны находиться изображения «ведомых», устанавливаемые для конкретной группы, с учетом траектории ее перемещения. Далее измерительные комплекты 4.1 и 4.2 «ведомых» на основе полученной информации вычисляют параметры своего положения в группе и передают их в свою систему навигации и управления с целью устранения имеющегося отклонения от их места, установленного в группе с учетом траектории ее движения.
Таким образом, предлагаемый способ определения взаимного положения и управления для группы перемещающихся объектов обеспечивает:
- определение взаимного положения объектов в системе с целью управления группой с учетом траектории ее движения;
- повышение точности определения взаимного положения за счет использования экстремально-корреляционного метода анализа изображений измерительными комплектами «ведомых»;
- независимость точности и помехоустойчивости получаемых результатов от переотраженных от границ оптического пространства сигналов реперных излучателей потому, что их пространственная структурированность при отражении или нарушается, или не попадает в поле зрения телевизионных камер измерительных комплектов объектов группы.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ ВЗАИМНОГО ПОЛОЖЕНИЯ ОБЪЕКТОВ | 2011 |
|
RU2468383C1 |
| Способ регулирования скорости сближения сервисного и обслуживаемого космических аппаратов при их стыковке | 2019 |
|
RU2742132C1 |
| НАШЛЕМНАЯ СИСТЕМА ЦЕЛЕУКАЗАНИЯ | 2000 |
|
RU2168152C1 |
| Устройство автоматической стыковки космических аппаратов в операциях орбитального обслуживания | 2017 |
|
RU2669763C1 |
| СПОСОБ ИЗМЕРЕНИЯ РАССТОЯНИЯ МЕЖДУ ОБЪЕКТАМИ | 2015 |
|
RU2596607C1 |
| СПОСОБ УСТАНОВКИ ОБЪЕКТА В ПРОЕКТНОЕ ПОЛОЖЕНИЕ | 2013 |
|
RU2537516C1 |
| Способ идентификации реперов при решении задачи Р4Р в авиационных оптико-электронных системах позиционирования с единственной камерой | 2020 |
|
RU2749808C1 |
| Способ оценивания по реперным точкам угловых и пространственных координат объекта в оптико-электронной системе позиционирования | 2019 |
|
RU2720076C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ТРАНСПОРТНОГО СРЕДСТВА | 1991 |
|
RU2006794C1 |
| ВЫПРАВОЧНО-ПОДБИВОЧНО-РИХТОВОЧНАЯ МАШИНА ДЛЯ ВЫПРАВКИ И КОНТРОЛЯ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ И ОПТИКО-ЭЛЕКТРОННАЯ СИСТЕМА ВЫПРАВОЧНО-ПОДБИВОЧНО-РИХТОВОЧНОЙ МАШИНЫ | 2010 |
|
RU2443826C2 |
Изобретение относится к оптическим способам определения взаимного положения объектов и замкнутым телевизионным системам, в которых сигнал не используется для широкого вещания. Достигаемый технический результат - определение взаимного положения объектов для управления группой с учетом траектории ее движения, повышение точности благодаря использованию экстремально-корреляционного метода анализа изображений. Способ заключается в определении взаимного положения в группе перемещающихся объектов с измерением углов визирования комплекта оптических реперов объекта «ведущий» измерительными комплектами объектов «ведомые», причем координаты комплектов оптических реперов, их взаимное положение, а также координаты и положение измерительного комплекта каждого объекта в его системе координат известны, измерительные комплекты «ведомых» осуществляют измерение углов визирования максимумов диаграмм суммарного излучения комплекта оптических реперов «ведущего», передают, модулируя излучение оптических реперов «ведущего», идентификационные номера «ведомых», их изображения и координаты мест в системе координат «ведущего», где должны находиться изображения «ведомых», установленные для конкретной группы с учетом траектории ее перемещения, и вычисляют параметры взаимного положения измерительными комплектами каждого «ведомого». 2 з.п. ф-лы, 4 ил.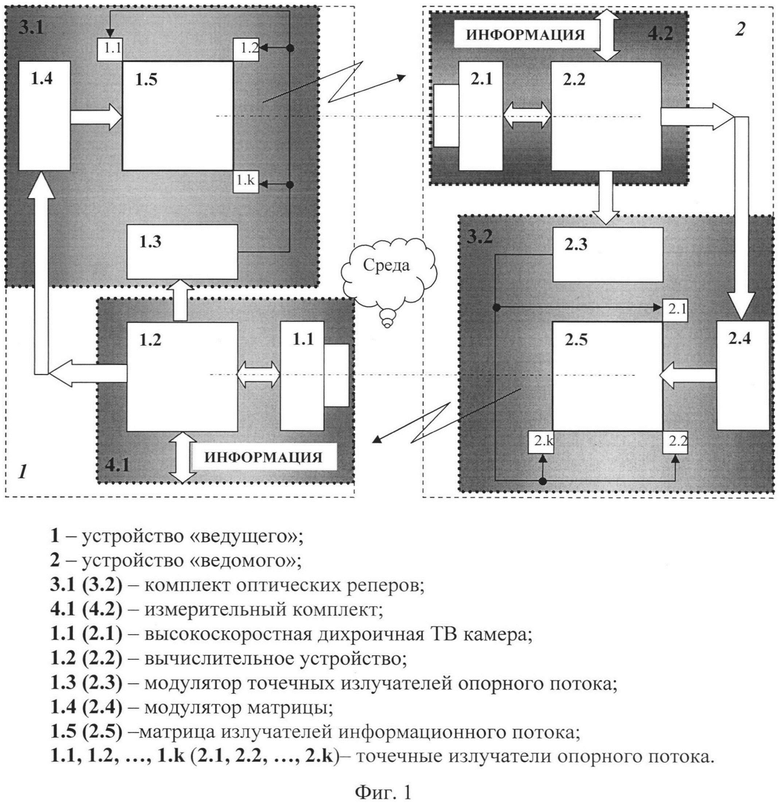
1. Способ определения взаимного положения и управления для группы перемещающихся объектов с измерением углов визирования комплекта оптических реперов одного объекта измерительным комплектом другого объекта, причем координаты комплекта оптических реперов, их взаимное положение, а также координаты и положение измерительного комплекта каждого объекта в его системе координат известны, отличающийся тем, что упомянутые комплекты располагают на каждом объекте группы, устанавливая между ними отношение «ведущий»-«ведомый», осуществляют измерительными комплектами «ведомых» измерение углов визирования максимумов диаграмм суммарного излучения комплекта оптических реперов «ведущего», передают, модулируя излучение оптических реперов «ведущего», идентификационные номера «ведомых», их изображения и координаты мест в системе координат «ведущего», где должны находиться изображения «ведомых», установленные для конкретной группы, с учетом траектории ее перемещения и вычисляют параметры взаимного положения измерительным комплектом каждого «ведомого».
2. Способ по п. 1, отличающийся тем, что параметры положения «ведомого» в группе определяют вычисляя взаимную корреляционную функцию между реальным изображением «ведомого» и его виртуальным изображением, заданным в системе координат «ведущего» с учетом траектории перемещения группы.
3. Способ по п. 1, отличающийся тем, что «ведущий» передает «ведомым» параметры вектора скорости с учетом заданной траектории движения группы.
| СПОСОБ ОПРЕДЕЛЕНИЯ ВЗАИМНОГО ПОЛОЖЕНИЯ ОБЪЕКТОВ | 2011 |
|
RU2468383C1 |
| СПОСОБ РАДИОВОЛНОВОГО ОБНАРУЖЕНИЯ ПЕРЕМЕЩАЮЩИХСЯ ОБЪЕКТОВ | 2007 |
|
RU2352995C1 |
| УСТРОЙСТВО ОПТИЧЕСКОГО ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ И(ИЛИ) ОРИЕНТАЦИИ ОБЪЕКТОВ И СООТВЕТСТВУЮЩИЕ СПОСОБЫ ОПРЕДЕЛЕНИЯ | 2007 |
|
RU2428709C2 |
| УСТРОЙСТВО ДИСТАНЦИОННОГО ДИНАМИЧЕСКОГО КОДИРОВАНИЯ И ИДЕНТИФИКАЦИИ РАЗЛИЧНЫХ ОБЪЕКТОВ | 1995 |
|
RU2115171C1 |
| СПОСОБ ВЫДЕЛЕНИЯ КРИСТАЛЛОВ СОЛЕЙ ИЗ РАСТВОРОВ БЕЗ ВЫПАРИВАНИЯ | 1922 |
|
SU4164A1 |
| СПОСОБ И УСТРОЙСТВО ДИНАМИЧЕСКОЙ БАЛАНСИРОВКИ КАРДАННЫХ ПЕРЕДАЧ | 2007 |
|
RU2353910C1 |
| DE 10103552 A1, 01.08.2002. | |||

