Предложение относится к способам бесконтактной внетрубной диагностики и может быть использовано при эксплуатации трубопроводов, в нефтегазодобывающей промышленности, коммунальном хозяйстве и других областях.
Известен способ прогнозирования течей в трубопроводах (патент РФ №2062394, МПК F17D 5/02, приоритет от 01.06.1993, опубл. 20.06.1996), включающий измерение градиента горизонтальной составляющей магнитного поля трубопровода, ориентированной вдоль его оси, и измерение отношения вертикальной и горизонтальной составляющих. По проведенным измерениям получают модули характеристических параметров трубопровода, сравнивают их значения на границах дискретных участков, по максимальным значениям модулей градиентов определяют местоположение прогнозируемой течи, а по отношению составляющих определяют вид и размеры дефекта.
Недостатками данного способа являются ограниченные возможности идентификации дефектов с незначительными напряжениями, необходимость существенного приближения датчиков поля к объекту измерений, зависимость выявляемых аномалий от геометрических характеристик условий измерений, необходимость предварительного трассирования трубопроводов и, следовательно, высокие трудозатраты и низкая точность привязки выявляемых дефектов.
Известен также способ контроля и обнаружения дефектов на трубопроводах из ферромагнитных материалов (патент РФ №2294482, МПК F17D 5/02, G01N 27/82, приоритет от 18.10.2005, опубл. 27.03.2007). Способ основан на измерении абсолютной величины модуля и/или градиента модуля магнитной индукции, предусматривает построение графиков этих величин, получение для выбранных участков средних значений этих величин, вычисление среднеквадратичных отклонений этих величин от их средних значений, выделение участков, для которых отклонение в два и более раз превышает среднеквадратичное, определение на местности участков, соответствующих выделенным на графиках, и проведение на этих участках работ методами неразрушающего контроля. При реализации способа необходимо соблюдение одинакового расстояния между датчиками (преобразователями) магнитной индукции или незначительное отклонение от этого равенства и постоянство глубины погружения трубопровода.
Недостатками способа являются пропуск аномалий от дефектов, магнитные моменты которых ориентированы неоптимально по отношению к датчикам поля, зависимость результатов диагностики от глубины погружения трубопровода, т.к. практически невозможно обеспечить одинаковое расстояние между осью трубопровода и датчиками, вследствие чего возникают ошибки при ранжировании аномалий, необходимость предварительного трассирования и, следовательно, снижение производительности работ и точности привязки аномалий.
Наиболее близким к предлагаемому является способ бесконтактного выявления местоположения и характера дефектов металлических сооружений и устройство для его осуществления (патент РФ №2264617, МПК G01N 27/82, G01V 3/08, приоритет от 23.05.2001, опубл. 20.11.2005). Способ включает измерение индукции постоянного магнитного поля над трубопроводом, перемещение датчиков и аппаратуры вдоль трубопровода, измерение магнитного поля в прямоугольных координатах двумя трехкомпонентными датчиками, составление тензора градиентов постоянного магнитного поля, обработку полученной информации путем матричного преобразования, определение фоновых значений и отклонений от этих значений. По отличию отклонений на заданную критериальную величину от фоновых значений судят о наличии и местоположении дефектов трубопроводов и строят магнитограмму с указанием местоположения дефектов.
Использование данного способа так же, как и предыдущего, приводит к пропуску аномалий при неоптимальной ориентации магнитного момента. При обработке не учитывается изменение расстояния от датчиков до трубопровода. Не учитывается также фактическая невозможность получения тензора градиентов по измерениям двумя трехкомпонентными датчиками. Это невозможно по следующим причинам. Во-первых, использование двух- пятикомпонентных датчиков не обеспечивает получение тензора градиента, поскольку в этом случае не получается полный набор компонент, т.к. минимально необходимое количество трехкомпонентных датчиков равно шести. Во-вторых, не все компоненты тензора могут быть получены с необходимой точностью, и поэтому матричные преобразования приводят к большим погрешностям. В-третьих, измерения над трубопроводом проводятся в существенно неоднородном магнитном поле, и получаемые в этом случае нормированные разности одноименных компонент поля не являются градиентами поля, так как градиенты должны получаться на основе бесконечно малого расстояния между трехкомпонентными датчиками. Недостатком прототипа также является необходимость предварительного трассирования трубопроводов, что приводит к повышению трудозатрат и снижению точности привязки выявляемых дефектов.
Ставится задача разработки способа диагностики, позволяющего выявлять аномалии при любой ориентации магнитных моментов дефектов и проводить одновременно геометризацию трубопровода в пространстве и выявление и геометризацию дефектов металла и изоляции. Для обеспечения необходимой точности интерпретации результаты измерений не должны зависеть от расстояния между датчиками поля и трубопроводом и от их наклона. Для оперативного выделения участков трубопровода для последующего детального анализа должна быть обеспечена возможность предварительной диагностики на этапе статистического анализа диагностических признаков.
Задача решается за счет того, что в способе диагностики технического состояния трубопровода, включающем измерение индукции постоянного магнитного поля над трубопроводом при перемещении трехкомпонентных датчиков поля вдоль трубопровода и составление матрицы разностей величин индукции постоянного магнитного поля, при этом измеряют индукцию постоянного магнитного поля не менее чем в шести точках пространства над трубопроводом и не менее девяти разностей величин индукции постоянного магнитного поля в этих же точках, дополнительно в зоне трубопровода возбуждают переменное магнитное и переменное электрическое поля и одновременно с индукцией постоянного магнитного поля измеряют не менее двух компонент вектора индукции переменного магнитного поля в каждой из, по крайней мере, трех точек пространства над трубопроводом, расположенных вдоль горизонтальной или вертикальной оси и совпадающих с точками измерения постоянного магнитного поля, и не менее двух компонент вектора напряженности переменного электрического поля, причем датчики постоянного магнитного поля, переменного магнитного поля и переменного электрического поля совмещены в одном конструктиве, проводят предварительную статистическую обработку результатов измерений, по совокупности признаков выделяют участки трубопровода для последующей обработки, определяют расположение и магнитные моменты источников аномалий постоянного и переменного магнитных полей и параметры нарушений изоляции трубопровода и по полученным данным производят идентификацию и ранжирование особенностей технического состояния трубопровода.
А также за счет того, что в способе диагностики технического состояния трубопровода, включающем измерение индукции постоянного магнитного поля над трубопроводом при перемещении трехкомпонентных датчиков поля вдоль трубопровода и составление матрицы разностей величин индукции постоянного магнитного поля, при этом измеряют индукцию постоянного магнитного поля не менее чем в шести точках пространства над трубопроводом и не менее девяти разностей величин индукции постоянного магнитного поля в этих же точках, одновременно с индукцией постоянного магнитного поля измеряют не менее двух компонент вектора индукции переменного магнитного поля тока катодной защиты в каждой из, по крайней мере, трех точек пространства над трубопроводом, расположенных вдоль горизонтальной или вертикальной оси и совпадающих с точками измерения постоянного магнитного поля, и не менее двух компонент вектора напряженности переменного электрического поля, возбуждаемого током катодной защиты, причем датчики постоянного магнитного поля, переменного магнитного поля и переменного электрического поля совмещены в одном конструктиве, проводят предварительную статистическую обработку результатов измерений, по совокупности признаков выделяют участки трубопровода для последующей обработки, определяют расположение и магнитные моменты источников аномалий постоянного и переменного магнитных полей и параметры нарушений изоляции трубопровода и по полученным данным производят идентификацию и ранжирование особенностей технического состояния трубопровода.
А также за счет того, что дополнительно определяют не менее шести скоростей изменения разностей величин индукции постоянного магнитного поля.
А также за счет того, что при перемещении датчиков поля вдоль трубопровода дополнительно измеряют расстояние от датчиков до проекции оси трубопровода на дневную поверхность, индицируют величину и направление удаления датчиков от проекции оси трубопровода, на основании чего оператор корректирует путь перемещения вдоль трубопровода, а при диагностировании, идентификации и ранжировании аномалий определяют расстояние от датчиков до оси трубопровода и вносят поправки в величины компонент поля и их разностей.
А также за счет того, что дополнительно определяют углы поворота датчиков поля вокруг горизонтальных и вертикальной осей, получают матрицу поправок и вносят их в матрицы компонент поля и их разностей.
Дополнительное измерение индукции переменного магнитного поля и напряженности переменного электрического поля одновременно с измерением индукции постоянного магнитного поля дает возможность получать и фиксировать в памяти прибора характеристики геометрического положения трубопровода, величину удаления датчиков от проекции оси трубопровода на дневную поверхность и характеристики его изоляции.
Это позволяет отказаться от предварительного трассирования трубопровода до проведения диагностических измерений, что повышает экономическую эффективность диагностирования, а также точность диагностирования технического состояния трубопровода за счет улучшения взаимной увязки наблюдений по различным признакам дефектов.
Информация о геометрическом положении оси трубопровода, полученная по измерениям переменного магнитного поля, например при проведении диагностики внутрипромыслового трубопровода малого диаметра, позволяет более точно ранжировать аномалии постоянного магнитного поля, связанные с дефектами металла изучаемого объекта. Информация о различии вычисленной глубинности источников локальных аномалий и трубопровода позволяет разделить аномалии, связанные с магнитными полями металлических предметов, расположенных в околотрубном пространстве под землей (тросы, обломки конструкций, труб и т.д.), и собственно аномалий, связанных с дефектами металла трубопровода.
Сведения о положении осей трубопроводов среднего и большого диаметра также позволяют более точно определять местоположение дефектов, так как в этом случае при решении обратных задач уменьшается интервал возможной глубинности дефектов.
Геометризация положения трубопровода позволяет получить поправки в величины интегральных параметров разностей величин индукции, которые используются при ранжировании выявленных аномалий постоянного магнитного поля. Благодаря использованию интегральных параметров разностей величин индукции, т.е. параметров, определяемых с помощью антенн, ориентированных вдоль всех трех пространственных осей, получаемые характеристики аномалий не зависят от ориентации магнитных моментов, связанных с дефектами. Возможность их пропуска существенно уменьшается.
Способ позволяет измерять компоненты вектора индукции переменного магнитного поля, что в свою очередь дает возможность учитывать изменения геометрии положения датчиков и тем самым уменьшить погрешности диагностических параметров.
В прототипе диагностические выводы делают по амплитуде аномалии, т.е. по одному признаку. В предлагаемом способе выявление, идентификация и ранжирование особенностей технического состояния трубопроводов производят на основе комплекса признаков, включающих особенности компонент поля, их разностей и скоростей изменения разностей и их интегральных параметров, параметров состояния изоляции и геометрических параметров, например, пространственного радиуса прогиба трубопровода.
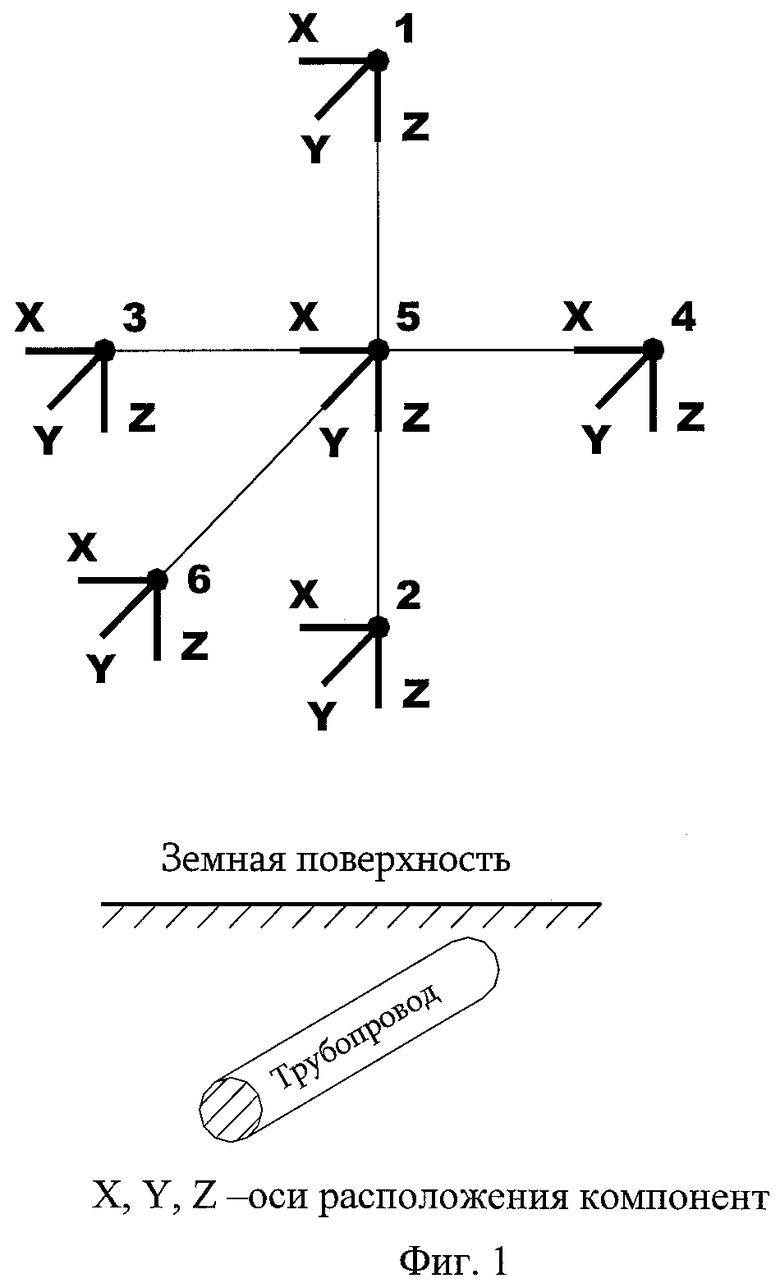
На фиг.1 приведена схема расположения датчиков узла измерений постоянного магнитного поля и осей измерений.
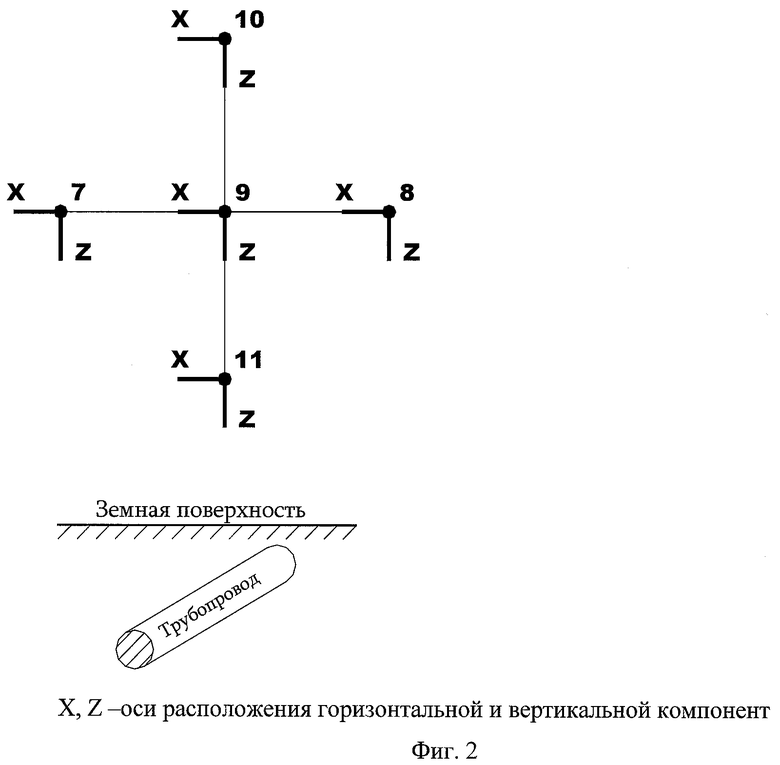
На фиг.2 приведена схема расположения датчиков узла измерений переменного магнитного поля и осей измерений.
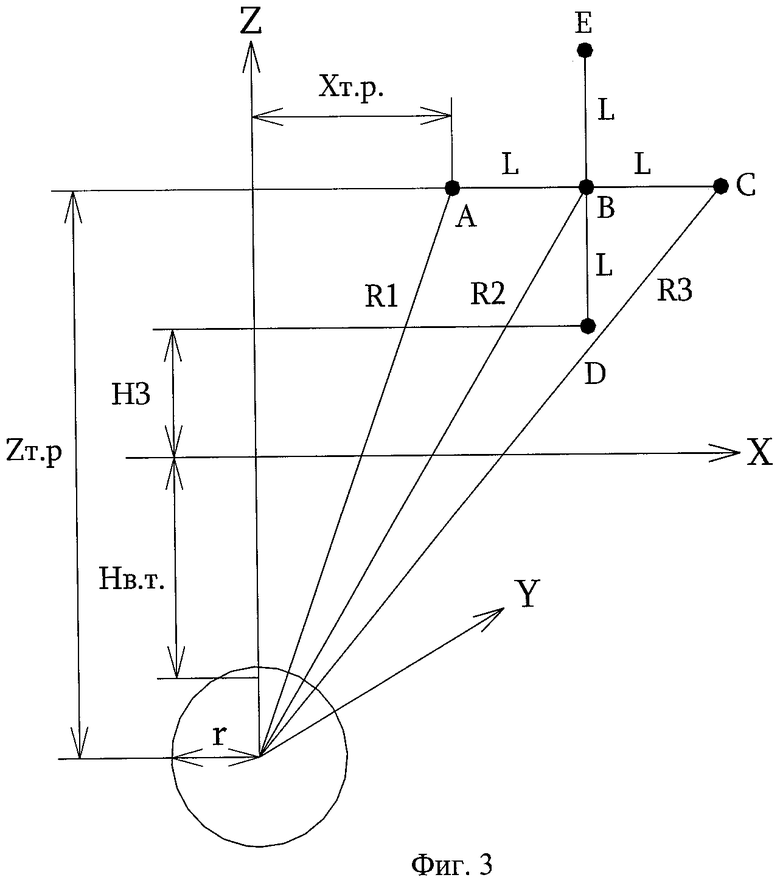
На фиг.3 приведена схема наблюдений, поясняющая расчеты по предлагаемому способу.
А, В, С, D, Е - точки расположения магнитных датчиков;
L - расстояние между магнитными датчиками;
Z т.р. - расстояние от центра трубопровода до проекции центра системы датчиков на вертикальную ось;
R1, R2, R3 - расстояния от центра трубопровода до точек А, В и С соответственно;
Х т.р. - расстояние от точки А до оси Z;
НЗ - расстояние от точки D до оси X;
Н в.т.- расстояние от поверхности земли до верхней кромки трубопровода;
r - радиус трубопровода.
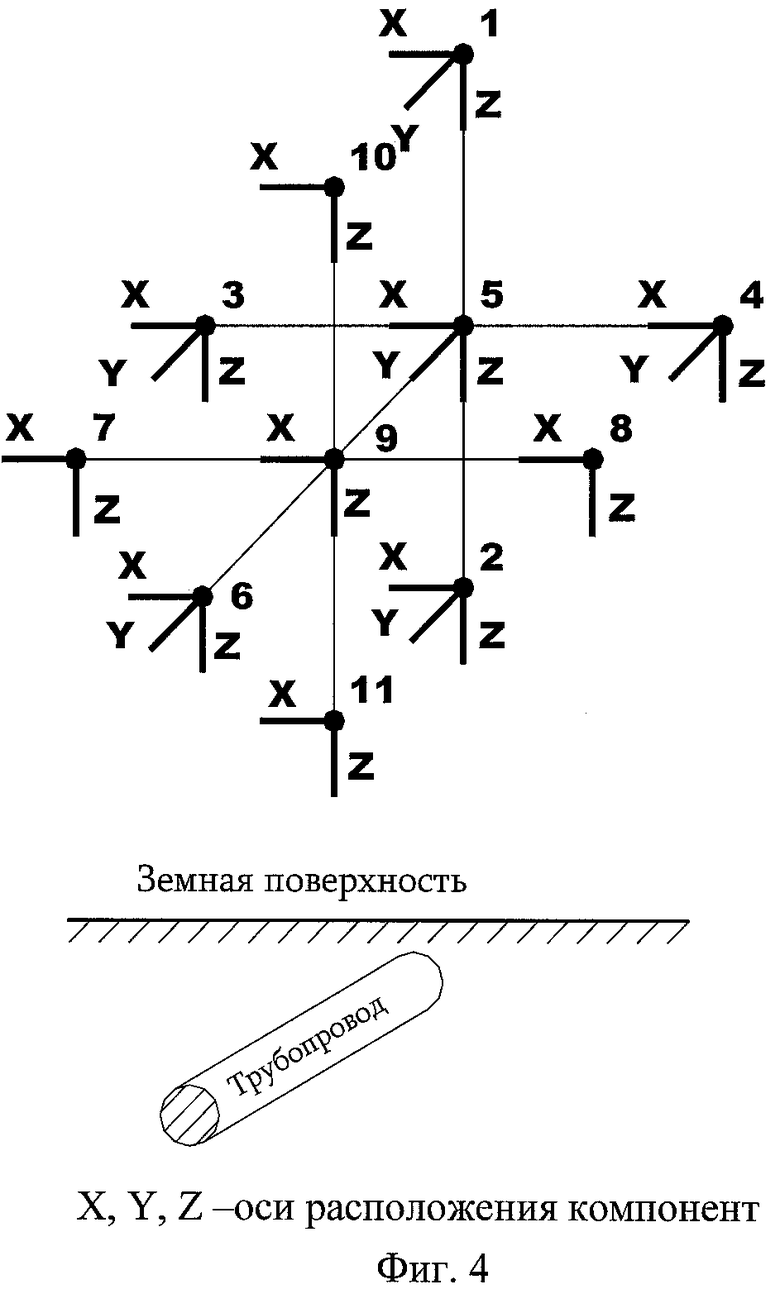
На фиг.4 приведена схема расположения датчиков объединенного узла датчиков магнитного поля.
На фиг.5 приведен возможный вариант устройства для осуществления предлагаемого способа.
Для осуществления способа необходимо произвести следующие операции.
1. Измеряют индукцию постоянного магнитного поля при перемещении трехкомпонентного датчика вдоль проекции оси трубопровода на дневную поверхность. В каждый момент измерения отсчеты производятся по крайней мере в шести точках пространства над трубопроводом.
Необходимость измерений индукции постоянного магнитного поля в шести точках пространства объясняется необходимостью получения диагностических параметров вдоль трех осей (двух горизонтальных и одной вертикальной). При этом для получения разностей компонент индукции вдоль каждой из осей используют по два трехкомпонентных датчика магнитной индукции.
Измерение индукции постоянного магнитного поля и разностей одноименных компонент индукции производится с помощью узла датчиков постоянного магнитного поля.
Феррозондовые датчики 1-6 узла датчиков постоянного магнитного поля (фиг.1) установлены на концах крестообразной конструкции из немагнитного материала. Профили, из которых выполнены линейные элементы конструкции, ориентированы вдоль трех пространственных взаимно перпендикулярных осей. Четыре феррозондовых трехкомпонентных датчика 1-4 расположены в одной плоскости на концах отрезков трубок. Датчики настроены соосно, и их расположение позволяет получать разности одноименных компонент поля вдоль одной из горизонтальных и вертикальной осей. Пятый феррозондовый трехкомпонентный датчик 5 расположен в точке пересечения отрезков, на концах которых расположены первые четыре датчика, а шестой датчик 6 расположен вне плоскости, в которой расположены остальные датчики. Пятый и шестой датчики также настроены соосно, с минимальным дисбалансом, и их расположение позволяет получать разности одноименных компонент поля вдоль второй горизонтальной оси. Каждый из трехкомпонентных датчиков снабжен устройством определения разности одноименных компонент индукции, многоканальным АЦП, микроконтроллером, интерфейсом (например, RS 485) с адаптерами для передачи сигнала для последующей обработки и оперативного управления работой узла в блок сбора данных и управления.
2. Измеряют не менее девяти разностей величин индукции постоянного магнитного поля над трубопроводом. В соответствии с выбранной схемой наблюдений, в которой используют шесть трехкомпонентных феррозондов, это возможно.
3. Возбуждают переменное магнитное и переменное электрическое поле над трубопроводом.
4. Измеряют не менее двух компонент вектора индукции переменного магнитного поля в каждой из по крайней мере трех точек пространства над трубопроводом, расположенных на одной прямой. Измерение двух компонент вектора магнитной индукции позволяет получать в каждой точке измерений модуль вектора магнитной индукции.
Измерение компонент вектора магнитной индукции производится с помощью узла датчиков переменного магнитного поля.
Узел датчиков переменного магнитного поля (фиг.2) состоит из системы расположенных в одной плоскости двухкомпонентных индукционных датчиков 7-11, преобразующих магнитную индукцию, создаваемую протекающим по трубопроводу током, в электрические сигналы. Система представляет собой крестообразную конструкцию, на концах которой установлены индукционные датчики, причем одноименные оси датчиков параллельны, оси каждой пары из двухкомпонентных соединенных датчиков взаимно ортогональны, оси всех датчиков расположены в одной плоскости. Четыре датчика 7-10 расположены на концах отрезков взаимно перпендикулярных прямых, а пятый датчик 11 в точке пересечения этих отрезков. Таким образом получаются две системы из двухкомпонентных датчиков. Одна система датчиков (7-9) горизонтальная, а другая (9, 10, 11) - вертикальная. Сигналы от индукционных датчиков подаются на переключаемые избирательные усилители (100 или 625 Гц), многоканальный АЦП и далее через разветвитель HUB USB в блок сбора данных и управления.
В том случае, если датчики магнитной индукции расположены вдоль вертикальной или горизонтальной оси, реализуется возможность определения в процессе измерений расстояния от точки наблюдений до проекции оси трубопровода на дневную поверхность и необходимого направления движения оператора для приближения к проекции оси. При дальнейшей обработке определяется глубина погружения трубопровода и наикратчайшее расстояние от движущейся точки наблюдения до оси трубопровода.
При проведении измерений переменного магнитного поля в трех точках, расположенных вдоль горизонтальной оси А, В и С (фиг.3), в прямоугольной системе координат Z, Х в точке измерения ток, создаваемый генератором, равен J. Тогда модули напряженности переменного магнитного поля HA; HB; HC в точках А, В и С составят соответственно:
 ;
;  ;
;  ,
,
где R1, R2, R3 - расстояние от центра трубопровода до точек А, В, С;
L - расстояние между датчиками.
Проведя алгебраические преобразования, получаем величину отхода датчиков от проекции оси трубопровода на дневную поверхность Хтр:

где  ;
; 
Удаление центра датчиков от проекции оси трубопровода на дневную поверхность определяется из соотношения: Хтр + L.
Аналогичным образом определяется удаление системы датчиков переменного магнитного поля при использовании для измерений системы датчиков, расположенных вдоль вертикальной оси, т.е. в точках D, В, Е. Для уменьшения погрешности определения Хтр или Хтр + L используют двухкомпонентные измерения в пяти точках, т.е. вдоль горизонтальной и вертикальной осей.
5. Измеряют напряженность переменного электрического поля. Для этого к электрометрическим усилителям подключают стелющуюся и воздушную электрическую телескопическую антенну. Сигналы от электрометрических усилителей подаются на АЦП в блок сбора данных, управления и индикации. Амплитудно-частотные характеристики антенн и параметры входных усилителей обеспечивают измерения электрического поля на частоте 625 Гц в бесконтактном варианте.
Точка записи наблюдений электрического поля, измеренного с помощью воздушной антенны, относится к ее геометрическому центру, а измеренная с помощью стелющейся антенны - к середине приемной линии.
Для работы используется антенный усилитель с входной емкостью менее 5 pF и усилитель для стелющейся антенны с входным сопротивлением более 1 ГОм.
Операции по пп.1-5 выполняют одновременно.
При этом датчики постоянного и переменного магнитного поля и переменного электрического поля совмещают в одном конструктиве. Это позволяет существенно увеличить точность измерений, т.к. уменьшаются погрешности, связанные с ошибками привязки наблюдений, и избежать трудозатрат на дополнительные проходы для трассирования трубопровода.
Одновременные измерения компонент индукции постоянного магнитного поля, разностей их одноименных компонент, компонент модуля векторов индукции переменного магнитного поля выполняются с помощью объединенного узла датчиков магнитного поля.
Объединенный узел датчиков магнитного поля (фиг.4) включает узел датчиков постоянного магнитного поля и узел датчиков переменного магнитного поля. Плоскости, в которых расположены пять датчиков каждого из узлов, параллельны. Датчики, расположенные в центрах каждого из узлов, и шестой датчик узла датчиков постоянного магнитного поля, расположенный вне плоскости, в которой расположены пять датчиков этого узла, расположены на одной прямой, перпендикулярной обеим плоскостям. Расстояние между плоскостями определяется требованиями к погрешностям измерений каждого из узлов датчиков, необходимым для решения поставленных задач диагностики технического состояния трубопровода.
Проводят статистическую обработку на основе спектрального анализа и осреднения величин компонент векторов постоянного магнитного поля, величин разности одноименных компонент постоянного магнитного поля, модулей и компонент переменного магнитного поля, компонент переменного электрического поля, определение стандартного отклонения каждой из анализируемых величин, вычисление величин относительных разностей и их интегральных параметров и выявление аномалий указанных параметров по превышению над стандартными отклонениями по известным статистическим приемам (критерий трех стандартных отклонений) и участки трубопровода для последующей обработки.
б. Вычисляют расположение и магнитные моменты источников аномалий постоянного магнитного поля. Используя аналитические выражения индукции для горизонтальных и вертикальных магнитных диполей (например, Гринкевич Г.И. М.: Недра. 1987. С.17), к которым можно свести источники аномалий, на основе измерений компонент поля в шести точках пространства, получаем систему уравнений, которая приводится к алгебраическому уравнению четвертой степени. Уравнение решается стандартно, например, методом подстановок и формулы Кардана (И.Н.Бронштейн, К.А.Семендяев. Справочник по математике. М., 1953. С.138).
Рассмотрим решение более подробно. В системе координат X, Z при условии, что ось Z направлена вертикально вниз, ось Х направлена перпендикулярно оси трубопровода, величины компонент напряженности горизонтального магнитного диполя определяются следующими соотношениями (Гринкевич Г.И. М.: Недра. 1987. С.17):
Величины компонент напряженности вертикального магнитного диполя определяются соотношениями:
где x, z - координаты феррозондов, М - магнитный момент диполя.
Расчет местоположения дефекта производится для случая, когда дефект трубопровода можно уподобить вертикальному магнитному диполю. Отношение вертикальной Hz(A) компоненты напряженности постоянного магнитного поля к горизонтальной Нх(А) для феррозонда в точке А (фиг.3) равно:
Для феррозонда в точке С отношение компонент Hz(C) к Нх(С) равно:
 , где L - расстояние между датчиками в точках А и С.
, где L - расстояние между датчиками в точках А и С.
Обозначим: 
Откуда окончательно:

Используя выражение для Hz(A) и проведя подстановку в  получим уравнение четвертой степени относительно неизвестной X.
получим уравнение четвертой степени относительно неизвестной X.
Используя подстановки и известную формулу Кардана, получаем явное выражение для X, затем выражение для Z и для магнитного момента М.
В результате решения получаем расположение и магнитные моменты источников аномалий.
7. Производят геометризацию трубопровода в пространстве с определением радиуса прогиба трубопровода.
Геометризацию трубопровода в пространстве с определением радиуса прогиба трубопровода проводят согласно рекомендациям ВРД 39.10-026-2001.
Радиус прогиба трубопровода определяют, используя значения глубин заложения трубопровода, измеренные в трех точках, исправленных за изменение рельефа дневной поверхности. Изменение рельефа дневной поверхности может быть определено с помощью теодолитного хода или по данным высокоточного GPS.
Радиус прогиба считается недопустимым при величине, меньшей 500 D, где D - диаметр трубопровода. При проведении геометризации определяют также расстояние от центра трубопровода до центра системы датчиков (см. ниже).
8. Определяют интегральные параметры нарушений изоляции, площадь сквозных дефектов и остаточный ресурс изоляции.
Состояние изоляционного покрытия может быть определено согласно рекомендациям ВРД 39.10-026-2001 бесконтактным способом, используя измерения наведенного переменного магнитного и электрического полей.
Расчет производится по величине затухания возбуждаемого электрического поля переменного тока по номограммам или по таблицам для определенной частоты и определенного диаметра трубопровода. Находят интегральную величину сопротивления изоляционного покрытия, отнесенную к одному квадратному метру поверхности трубопровода. Далее вычисляют интегральную величину площади дефекта на одном квадратном метре этого изоляционного покрытия и максимальную интегральную величину площади сквозного дефекта, проводят определение скорости старения изоляционного покрытия или ресурса покрытия.
Рассмотрим методику расчета состояния изоляционного покрытия по измерениям переменного магнитного поля. Расчет согласно рекомендациям ВРД 39.10-026-2001 производится следующим образом:
Затекание токов, протекающих по трубопроводу, определяется из соотношения:
где


i1 и i2 - токи, измеренные в точках 1 и 2; L1-2 - расстояние между точками измерений этих токов.
Затем по величине затухания тока (γ2) по номограммам или по таблицам для определенной частоты и определенного диаметра трубопровода согласно ВРД 39.10-026-2001 находят интегральную величину сопротивления изоляционного покрытия (RH), отнесенную к одному квадратному метру поверхности трубопровода. Далее по эмпирической формуле  вычисляют интегральную величину площади дефекта на одном квадратном метре этого изоляционного покрытия:
вычисляют интегральную величину площади дефекта на одном квадратном метре этого изоляционного покрытия:

Расчет максимальной интегральной величины площади сквозного дефекта SD на каждом квадратном метре изоляционного покрытия:
 .
.
Определение скорости старения изоляционного покрытия или ресурса покрытия производится согласно ВРД 39-1.10-026-2001.
Производится расчет интегральной величины площади дефекта, максимальной интегральной величины площади сквозного дефекта, скорости старения изоляционного покрытия на основе измерений переменного магнитного и электрического поля и затем определяются средние величины этих параметров.
9. По полученным данным по совокупности признаков производят диагностирование, идентификацию и ранжирование выделенных аномалий с определением мест наибольшей аварийной опасности.
По особенностям графиков компонент поля определяют, с каким магнитным диполем можно сопоставить выявленную магнитную аномалию, т.е. с точечным диполем или с зоной дефектов (диполем конечных размеров). Затем, учитывая различие особенностей графиков в зоне аномалий, определяют, с вертикальным или горизонтальным диполем можно соотнести выявленную аномалию. Горизонтальный диполь создает поле магнитной индукции, вертикальная компонента которой и ее разность («градиент») по вертикальной оси над зоной дефекта имеют нулевые значения, а вертикальная компонента вертикального диполя и его разность («градиент») по вертикальной оси над зоной дефекта имеют в этом случае максимальные значения. Горизонтальные диполи, особенно конечных размеров и протяженные вдоль оси трубопровода, чаще всего связаны с коррозионными язвами в зонах продольных заводских швов или продольными зонами напряженно-деформированного состояния, а вертикальные диполи - с дефектами в вертикальных сварных швах или с вертикальными механическими дефектами. Используя информацию о состоянии изоляции и ее интегральных характеристиках, определяют, сопровождаются ли дефекты металла дефектами изоляции, а также выявляют дефекты трубопровода, связанные только с нарушениями изоляции по технологическим или эксплуатационным причинам. В соответствии с количеством выявленных дефектов и их качественной характеристикой производят их ранжирование с присвоением определенных баллов дефектности, например, по 10-балльной шкале. На основании полученных данных принимают решение о проведении детализационных работ или шурфования с проведением работ по контактной диагностике или о замене труб с большим количеством дефектов.
В благоприятных условиях при наличии системы станций катодной защиты имеется возможность вместо возбуждения переменных магнитных и электрических полей в соответствии с операцией 3 использовать поля, создаваемые током катодной защиты. В этом случае измеряют индукцию переменного магнитного поля и напряженность переменного электрического поля четных гармоник (чаще всего на частотах 100 или 300 Гц) полей, создаваемых током катодной защиты. В остальном состав операций способа остается тем же, что и в случае возбуждения полей генераторными устройствами.
Для экспрессного выделения мест вероятных отклонений технического состояния трубопровода от нормального одновременно с измерением компонент индукции постоянного магнитного поля, индукции переменного магнитного поля, напряженности переменного электрического поля дополнительно измеряют не менее шести величин скоростей изменения разностей индукции постоянного магнитного поля.
Производят измерения скоростей изменения разностей одноименных компонент в шести точках. Для этого используют разности, полученные в разных точках пространства, и нормируют их базовым расстоянием между датчиками.
Строят графики зависимости скорости изменения разности компонент вдоль вертикальной и перпендикулярной трубопроводу горизонтальной осей как функции расстояния вдоль трубопровода. По известным статистическим критериям выделяют интервалы трубопровода, на которых скорость изменения разности компонент поля в 2-3 раза превышает среднеквадратичные отклонения оценок величины скорости от ее средних значений. Интервалы трубопровода с повышенной скоростью изменения разности компонент поля выделяют для последующей детальной обработки.
Дополнительно для увеличения информативности предварительной диагностики на выделенных интервалах трубопровода, используя скорость изменения разности вдоль вертикальной оси, определяют коэффициент формы предполагаемого дефекта (N), (Справочник геофизика. Магниторазведка. М.: Недра. 1990. С.135) по формуле:
где K1,2 - величина скорости изменения максимальных значений разностей, измеренная в эпицентре аномалии,
Lg - расстояние по вертикали между точками, в которых измеряют разности одноименных компонент индукции,
h - глубина залегания верхней кромки аномалообразующего объекта.
N=1 для полюса намагничения,
N=1/2 для горизонтального цилиндра,
N=1/3 для шара.
Для обеспечения независимости результатов интерпретации от расстояния между системой датчиков и трубопроводом необходимо дополнительно произвести следующие операции.
1. При перемещении датчиков поля вдоль трубопровода измеряют расстояние от датчиков до проекции оси трубопровода на дневную поверхность. Определение расстояния производится на основе измерений модулей напряженности переменного магнитного поля HA; HB; HC в точках А, В и С (фиг.3). Первоначально в соответствии с формулой, приведенной выше, определяем величину отхода датчиков от проекции оси трубопровода на дневную поверхность Хтр. Затем определяем Zтр - расстояние от центра трубопровода до проекции центра системы датчиков на вертикальную ось по формулам:
 и
и
 ,
,
где a=HA/HB=R2/R1; b=HA/HC=R3/R1.
Далее определяем величины R1, R2, R3, характеризующие расстояния от датчиков до центра трубопровода по формулам:
 ;
;  ;
; 
Очевидно, величина R1 будет получена с минимальной погрешностью.
В случае необходимости, используя информацию о величине радиуса трубопровода и расстоянии от центра системы датчиков или расстоянии от нижнего датчика до трубы, получаем расстояние до верхней кромки трубопровода.
2. Индицируют величину и направление удаления датчиков от проекции оси трубопровода на дневную поверхность. В зависимости от полученной информации оператор корректирует путь своего перемещения с датчиками вдоль трубопровода.
3. При диагностировании, идентификации и ранжировании аномалий определяют расстояние от датчиков до оси трубопровода и вносят поправки в величины компонент поля, их разностей и скоростей изменения разностей.
Для этого приводят аномалии компонент индукции или их разностей к одному уровню расстояний, например, к одному метру. Если источники аномалий постоянного магнитного поля удалены от точек измерений на расстояния 1 м, 2 м и 3 м, то, учитывая кубическую зависимость модуля амплитуды аномалий от расстояния, получаем поправки, вносимые в компоненты индукции для одного метра - 1, для двух метров - 8, а для трех метров - 27.
Для устранения погрешностей, связанных с изменением пространственного положения преобразователей, дополнительно производят следующие операции.
1. Определяют углы поворота датчиков поля вокруг горизонтальных и вертикальной осей. Углы поворота ζ, ψ, φ можно считать углами Эйлера (Справочник по математике. М. 1953. С.219), причем ζ - угол нутации, ψ - угол прецессии, φ - угол чистого вращения.
2. Получают матрицу поправок и вносят их в матрицы компонент поля, их разностей и скоростей изменения разностей.
В этом случае, если обозначим исходную систему координат через X, У и Z, а новую систему координат через Xi, Yi, Zi, компоненты векторов индукции в исходной системе Вх, By, Bz, а компоненты индукции в новой системе через Bxi, Byi, Bzi, то матрица поправок [Т] будет иметь вид:
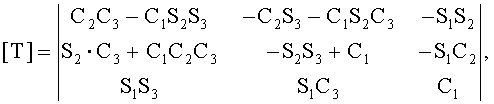
где C1=cosζ, C2=cosψ, С3=cosφ,
S1=sinζ, S2=sinψ, S3=sinφ.
Поправки в реально измеренные компоненты для каждой из шести точек расположения трехкомпонентных феррозондов Вх, By, Bz вносятся согласно соотношению:
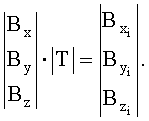
Поправки в реально измеренные разности компонент вносят согласно соотношению
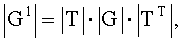
|TT| - транспонированная матрица |Т|.
Матрица |G| имеет вид:
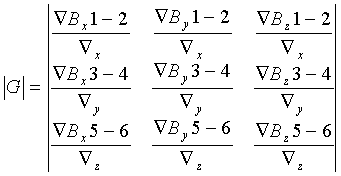 ,
,
где ∇Bx 1-2, ∇By 1-2, ∇Bz 1-2 - разности величин индукции компонент по осям X, Y и Z между точками 1-2,
∇Bx 3-4, ∇By 3-4, ∇Bz 3-4 - разности величин индукции компонент по осям X,Y и Z между точками 3-4,
∇Bx 5-6, ∇By 5-6, ∇Bz 5-6 - разности величин индукции компонент по осям X, Y и Z между точками 5-6.
∇x - расстояние между точками 1 и 2,
∇y - расстояние между точками 3 и 4,
∇z - расстояние между точками 5 и 6.
Способ может быть осуществлен при помощи устройства (фиг.5), содержащего узел 12 датчиков 1-6 постоянного магнитного поля (фиг.1), узел 13 датчиков 7-11 переменного магнитного поля (фиг.2), соединенные в объединенный узел датчиков магнитного поля (фиг.4), узел 14 датчиков переменного электрического поля, блок 15 сбора данных и управления, блок 16 преобразователей-акселерометров 17-19, блок 20 возбуждения электромагнитного поля.
Узел датчиков постоянного магнитного поля содержит устройства определения разности значений индукции постоянного магнитного поля 21-23 (фиг.5), соединенные с многовходовыми аналого-цифровыми преобразователями 24, соединенными в свою очередь с микроконтроллерами 25-27. Микроконтроллеры соединены с адаптерами интерфейса 28-30 (например, может быть использован интерфейс RS 485), адаптерами преобразования из одного интерфейса в другой 31-33 (например, из интерфейса RS-485 в интерфейс USB(RS-485/USB)), разветвителем HUB USB 34 и далее с контроллером 35 блока сбора данных и управления (БСДУ) 15.
Индукционные датчики узла 13 датчиков переменного магнитного поля соединены (фиг.5) с избирательными переключаемыми усилителями 36-40, многоканальным аналого-цифровым преобразователем 41 и через разветвитель 34 - с контроллером 35 БСДУ 15.
Блок электрометрической диагностики состоит из воздушной 42 и стелющейся 43 антенн, переключающихся на частоты 100 и 625 Гц избирательных усилителей 44 и 45, соединенных с многоканальным аналого-цифровым преобразователем 41, соединенным через разветвитель HUB USB 34 с контроллером 35 БСДУ 15. БСДУ 15 через адаптер USB 46 и микроконтроллер 47 управляет работой автоматических аттенюатеров избирательных усилителей.
Бесконтактные антенны 42 и 43 за счет их распределенной емкости преобразуют напряженности электрического поля в электрические сигналы.
БСДУ 15 состоит из соединенных между собой контроллера 35, энергонезависимой памяти 48, клавиатуры 49 и индикатора 50. Контроллер 35 через USB-порт соединяется с персональным компьютером и с системой спутниковой навигации GPS.
Блок возбуждения электромагнитного поля 20 состоит из генератора 51, согласующего устройства, используемого при возбуждении поля рамкой, и заземляемой электрической линии, один из концов которой соединен с трубопроводом, а другой с заземленным электродом или емкостным заземлителем.
Звуковая индикация прохождения оператором над проекцией оси трубопровода на земную поверхность производится с помощью детектора 52, преобразователя напряжение-частота 53 и головных телефонов 54.
Из описания видно, что способ позволяет выявлять аномалии при любой ориентации магнитных моментов дефектов, проводить одновременную геометризацию трубопровода в пространстве и выявлять дефекты металла и изоляции. Благодаря учету расстояния между датчиками поля и трубопроводом и их наклона существенно повышается точность ранжирования аномалий и диагностики трубопровода. Учет скорости изменения разностей компонент поля позволяет оперативно выделять участки трубопровода для последующего детального анализа.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ диагностики технического состояния подземных трубопроводов | 2016 |
|
RU2630856C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ БЕСКОНТАКТНОЙ ДИАГНОСТИКИ ТЕХНИЧЕСКОГО СОСТОЯНИЯ ПОДЗЕМНЫХ ТРУБОПРОВОДОВ | 2014 |
|
RU2568808C2 |
| СПОСОБ И УСТРОЙСТВО ДИАГНОСТИКИ ТЕХНИЧЕСКОГО СОСТОЯНИЯ ПОДЗЕМНОГО ТРУБОПРОВОДА | 2012 |
|
RU2510500C1 |
| СПОСОБ И УСТРОЙСТВО ДИАГНОСТИКИ ТЕХНИЧЕСКОГО СОСТОЯНИЯ ПОДЗЕМНЫХ ТРУБОПРОВОДОВ | 2012 |
|
RU2504763C1 |
| СПОСОБ ДИАГНОСТИЧЕСКОГО КОНТРОЛЯ ТЕХНИЧЕСКИХ ПАРАМЕТРОВ ПОДЗЕМНОГО ТРУБОПРОВОДА | 2016 |
|
RU2633018C2 |
| СПОСОБ ВЫЯВЛЕНИЯ ЛОКАЛЬНЫХ ДЕФЕКТОВ МЕТАЛЛА ПОДЗЕМНОГО ТРУБОПРОВОДА | 2013 |
|
RU2536778C1 |
| Способ диагностики технических параметров подземного трубопровода | 2020 |
|
RU2735349C1 |
| СПОСОБ И УСТРОЙСТВО ДИАГНОСТИКИ ТЕХНИЧЕСКИХ ПАРАМЕТРОВ ПОДЗЕМНОГО ТРУБОПРОВОДА | 2016 |
|
RU2634755C2 |
| Способ измерения длины подземного трубопровода | 2017 |
|
RU2662246C1 |
| СПОСОБ ДИАГНОСТИКИ ТЕХНИЧЕСКИХ ПАРАМЕТРОВ ПОДЗЕМНОГО ТРУБОПРОВОДА | 2024 |
|
RU2824417C1 |
Способ относится к бесконтактной диагностике. Способ включает измерение не менее восемнадцати компонент индукции постоянного магнитного поля над трубопроводом трехкомпонентными датчиками при перемещении их вдоль трубопровода, составление матрицы разностей величин индукции постоянного магнитного поля, определение стандартных отклонений величин измеряемых компонент матрицы разностей от их средних значений. Одновременно измеряют не менее девяти компонент разностей величин индукции постоянного магнитного поля и не менее шести компонент скоростей изменения разностей индукции постоянного магнитного поля. В зоне трубопровода возбуждают переменное магнитное и переменное электрическое поля и одновременно с индукцией постоянного магнитного поля измеряют индукцию переменного магнитного поля и напряженность переменного электрического поля, причем датчики постоянного магнитного поля, переменного магнитного поля и переменного электрического поля совмещены. Затем проводят предварительную статистическую обработку результатов измерений и по совокупности признаков выделяют участки трубопровода для последующей обработки. Определяют расположение и магнитные моменты источников аномалий постоянного и переменного магнитных полей и параметры нарушений изоляции трубопровода и по полученным данным производят идентификацию и ранжирование особенностей технического состояния трубопровода. Технический результат - повышение точности диагностирования. 2 н. и 6 з.п. ф-лы, 5 ил.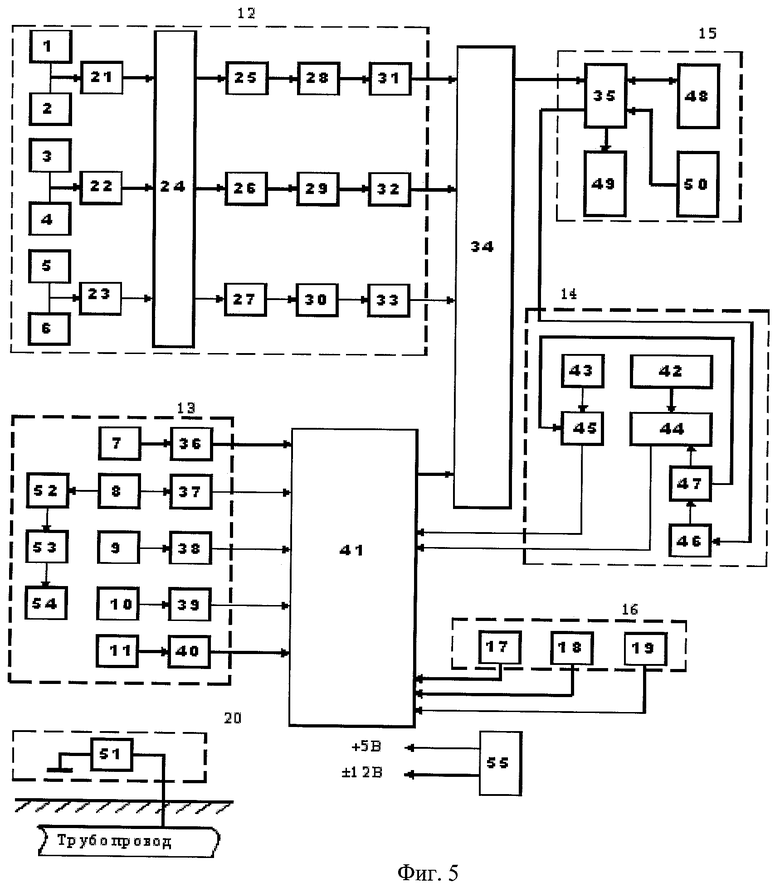
1. Способ диагностики технического состояния трубопровода, включающий измерение индукции постоянного магнитного поля над трубопроводом при перемещении трехкомпонентных датчиков поля вдоль трубопровода и составление матрицы разностей величин индукции постоянного магнитного поля, отличающийся тем, что измеряют индукцию постоянного магнитного поля не менее чем в шести точках пространства над трубопроводом и не менее девяти разностей величин индукции постоянного магнитного поля в этих же точках, дополнительно в зоне трубопровода возбуждают переменное магнитное и переменное электрическое поля, и одновременно с индукцией постоянного магнитного поля измеряют не менее двух компонент вектора индукции переменного магнитного поля в каждой из, по крайней мере, трех точек пространства над трубопроводом, расположенных вдоль горизонтальной или вертикальной оси и совпадающих с точками измерения постоянного магнитного поля, и не менее двух компонент вектора напряженности переменного электрического поля, причем датчики постоянного магнитного поля, переменного магнитного поля и переменного электрического поля совмещены в одном конструктиве, проводят предварительную статистическую обработку результатов измерений, по совокупности признаков выделяют участки трубопровода для последующей обработки, определяют расположение и магнитные моменты источников аномалий постоянного и переменного магнитных полей и параметры нарушений изоляции трубопровода и по полученным данным производят идентификацию и ранжирование особенностей технического состояния трубопровода.
2. Способ по п.1, отличающийся тем, что дополнительно определяют не менее шести скоростей изменения разностей величин индукции постоянного магнитного поля.
3. Способ по п.1, отличающийся тем, что при перемещении датчиков поля вдоль трубопровода дополнительно измеряют расстояние от датчиков до проекции оси трубопровода на дневную поверхность, индицируют величину и направление удаления датчиков от проекции оси трубопровода, на основании чего оператор корректирует путь перемещения вдоль трубопровода, а при диагностировании, идентификации и ранжировании аномалий определяют расстояние от датчиков до оси трубопровода и вносят поправки в величины компонент поля и их разностей.
4. Способ по п.1, отличающийся тем, что дополнительно определяют углы поворота датчиков поля вокруг горизонтальных и вертикальной оси, получают матрицу поправок и вносят их в матрицы компонент поля и их разностей.
5. Способ диагностики технического состояния трубопровода, включающий измерение индукции постоянного магнитного поля над трубопроводом при перемещении трехкомпонентных датчиков поля вдоль трубопровода и составление матрицы разностей величин индукции постоянного магнитного поля, отличающийся тем, что измеряют индукцию постоянного магнитного поля не менее чем в шести точках пространства над трубопроводом и не менее девяти разностей величин индукции постоянного магнитного поля в этих же точках, одновременно с индукцией постоянного магнитного поля измеряют не менее двух компонент вектора индукции переменного магнитного поля тока катодной защиты в каждой из, по крайней мере, трех точек пространства над трубопроводом, расположенных вдоль горизонтальной или вертикальной оси и совпадающих с точками измерения постоянного магнитного поля, и не менее двух компонент вектора напряженности переменного электрического поля, возбуждаемого током катодной защиты, причем датчики постоянного магнитного поля, переменного магнитного поля и переменного электрического поля совмещены в одном конструктиве, проводят предварительную статистическую обработку результатов измерений, по совокупности признаков выделяют участки трубопровода для последующей обработки, определяют расположение и магнитные моменты источников аномалий постоянного и переменного магнитных полей и параметры нарушений изоляции трубопровода и по полученным данным производят идентификацию и ранжирование особенностей технического состояния трубопровода.
6. Способ по п.5, отличающийся тем, что дополнительно определяют не менее шести скоростей изменения разностей величин индукции постоянного магнитного поля.
7. Способ по п.5, отличающийся тем, что при перемещении датчиков поля вдоль трубопровода дополнительно измеряют расстояние от датчиков до проекции оси трубопровода на дневную поверхность, индицируют величину и направление удаления датчиков от проекции оси трубопровода, на основании чего оператор корректирует путь перемещения вдоль трубопровода, а при диагностировании, идентификации и ранжировании аномалий определяют расстояние от датчиков до оси трубопровода и вносят поправки в величины компонент поля и их разностей.
8. Способ по п.5, отличающийся тем, что дополнительно определяют углы поворота датчиков поля вокруг горизонтальных и вертикальной оси, получают матрицу поправок и вносят их в матрицы компонент поля и их разностей.
| СПОСОБ БЕСКОНТАКТНОГО ВЫЯВЛЕНИЯ МЕСТОПОЛОЖЕНИЯ И ХАРАКТЕРА ДЕФЕКТОВ МЕТАЛЛИЧЕСКИХ СООРУЖЕНИЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2001 |
|
RU2264617C2 |
| СПОСОБ КОНТРОЛЯ И ОБНАРУЖЕНИЯ ДЕФЕКТОВ НА ТРУБОПРОВОДАХ ИЗ ФЕРРОМАГНИТНЫХ МАТЕРИАЛОВ | 2005 |
|
RU2294482C1 |
| RU 2062394 C1, 20.06.1996 | |||
| US 4289019 A, 15.09.1981 | |||
| US 4309659 A, 05.01.1982. | |||

