Изобретение относится к способу и устройству для гибки оконных стекол, а также к их применению. При промышленном серийном производстве оконных стекол применяются различные способы гибки, которые уже многократно отражены в патентной литературе.
Например, патентный документ WO 2012/080072 описывает способ поэтапной гибки оконных стекол в краевой и внутренней области. При этом оконное стекло сначала подвергается предварительной обработке на гибочном кольце в печи, причем предварительно изгибается кромка стекла, после чего следует дополнительная гибка кромки стекла посредством первого вакуумного устройства, перенос и гибка стеклянной пластины по площади на концевом гибочном кольце и окончательная гибка до желательной геометрической формы с помощью второго вакуумного устройства. Посредством поэтапной гибки могут быть сведены к минимуму оптические дефекты при сложных формах стекол.
В патентных документах WO 2004/087590 и WO 2006072721 в каждом случае описан способ, в котором стеклянная пластина сначала подвергается предварительной гибке на гибочной раме под действием силы тяжести, с последующей гибкой прессованием с помощью верхней и нижней гибочных матриц.
В патентных документах EP 255422 и US 5906668 в каждом случае описана гибка стеклянной пластины присасыванием к верхней гибочной матрице.
Из патентных документов EP 1550639 A1, US 2009/084138 A1 и EP 2233444 A1 в каждом случае можно заимствовать устройство, в котором нажимная рама на салазках, на которых может быть размещена стационарная опора с возможностью смещения, может транспортироваться между гибочными секциями.
В общем же существует потребность в компактных установках для гибки оконных стекол, причем оконные стекла должны изготавливаться с относительно короткими продолжительностями циклов и при сниженных производственных затратах. Кроме того, должны удовлетворяться высокие предъявляемые к качеству требования.
Соответственно этому, задача настоящего изобретения состоит в предоставлении способа, улучшенного по сравнению с известными ранее способами, а также соответствующего устройства для гибки оконных стекол. Эта и другие задачи решаются согласно предложению в изобретении посредством устройства и способа гибки оконных стекол с признаками дополнительных независимых пунктов прилагаемой формулы изобретения. Предпочтительные варианты осуществления изобретения следуют из зависимых пунктов формулы изобретения.
В смысле настоящего изобретения термин «предварительная гибка» означает неполное изгибание стекла относительно определенного или, соответственно, определяемого конечного изгибания (конечной геометрии и, соответственно, конечной формы) стекла. Например, предварительная гибка может составлять от 10 до 80% конечной гибки. При применении в смысле «кромочной предварительной гибки» термин относится к неполному изгибанию стекла в одной примыкающей к оконечной кромке стекла краевой области стекла, как правило, пролегающей по периметру стекла полосовидной краевой области. Например, ширина полосы составляет величину в диапазоне от 3 до 150 мм. Кромка стекла образована поверхностью (разреза), которая обычно располагается перпендикулярно обеим противолежащим относительно друг друга основным поверхностям стекла. При применении в смысле «поверхностной предварительной гибки» термин относится к неполному изгибанию стекла в центральной, соответственно, внутренней области стекла, которая окружена кромочной областью и непосредственно граничит с кромочной областью. В отличие от этого, термин «конечная гибка» подразумевает полное изгибание стекла. При применении в смысле «кромочной конечной гибки» термин относится к полному изгибанию краевой области стекла, при применении в смысле «поверхностной конечной гибки» термин означает полное изгибание во внутренней области стекла.
Термин «стекло» в общем и целом относится к стеклянной пластине, в частности, термически предварительно напряженному известково-натриевому стеклу.
Термин «сбоку» и, соответственно, «сдвигаемый в сторону» означает перемещение по меньшей мере с одним горизонтальным параметром движения, в результате чего конструкционная деталь может быть размещена сбоку относительно другой конструкционной детали.
Соответствующее изобретению устройство для гибки оконных стекол включает многочисленные конструкционные и функциональные отграниченные друг от друга зоны. Важной согласно изобретению составной частью является гибочная зона для изгибания нагретых стекол, которая предпочтительно оснащена нагревательным устройством для нагревания стекол. В частности, гибочная зона для этой цели доводится до температуры, которая обеспечивает возможность пластической деформации стекол, и обычно составляет величину в диапазоне от 600°С до 750°С.
Гибочная зона предпочтительно сформирована как закрытая и, соответственно, закрываемая от внешнего окружения нагреваемая камера, далее называемая «гибочной камерой». Гибочная камера имеет полость гибочной камеры, которая предпочтительно полностью окружена изолирующей стенкой. Полость гибочной камеры имеет по меньшей мере одно открывающееся в полость гибочной камеры отверстие, которое предпочтительно может закрываться дверцей гибочной камеры. Гибочная зона включает по меньшей мере две гибочных матрицы, а именно, первую гибочную матрицу и вторую гибочную матрицу, которые предпочтительно размещаются в полости гибочной камеры, образованной в виде гибочной камеры гибочной зоны.
В предпочтительном варианте осуществления изобретения первая гибочная матрица и вторая гибочная матрица в каждом случае имеют контактную поверхность для контактирования со стеклом. Контактная поверхность первой гибочной матрицы и второй гибочной матрицы в каждом случае имеет наружный поверхностный участок и внутренний поверхностный участок, и, соответственно, сформирована из наружного поверхностного участка и внутреннего поверхностного участка. Наружный поверхностный участок первой гибочной матрицы и второй гибочной матрицы в каждом случае сформирован пригодным для кромочной конечной гибки в краевой области стекла. Внутренний поверхностный участок первой гибочной матрицы и второй гибочной матрицы в каждом случае предпочтительно сформирован пригодным для поверхностной предварительной гибки в окруженной краевой областью центральной, соответственно, внутренней области стекла. В альтернативном варианте, внутренний поверхностный участок второй гибочной матрицы может быть сформирован пригодным для поверхностной конечной гибки.
Как применяемое здесь в дальнейшем, выражение «сформированный пригодным» в связи с наружным поверхностным участком контактной поверхности следует понимать так, что наружный поверхностный участок сформирован так, что может выполняться кромочная конечная гибка стекла. Однако стекло не обязательно должно подвергаться кромочной конечной гибке, но также может проводиться только кромочная предварительная гибка. Кромочная конечная гибка тогда выполняется только лишь на последующем технологическом этапе. Для этой цели наружный поверхностный участок не обязательно должен иметь форму, которая является комплементарной подвергаемому кромочной конечной гибке стеклу. В связи с внутренним поверхностным участком контактная поверхность подразумевается «сформированной пригодной» в том плане, что внутренний поверхностный участок сформирован так, что может выполняться поверхностная предварительная гибка стекла, причем поверхностная предварительная гибка не обязательно должна выполняться. Если внутренний поверхностный участок второй гибочной матрицы альтернативно сформирован пригодным для поверхностной конечной гибки, это значит, что может выполняться поверхностная конечная гибка, однако не обязательно должна проводиться. Поверхностная конечная гибка также может выполняться лишь на последующем технологическом этапе.
В этом варианте осуществления изобретения описываемая далее в связи с подающим модулем нажимная рама (например, нажимное кольцо) имеет поверхность прессования (контактную поверхность) для прижатия стекла, которая сформирована как комплементарная сформированному пригодным для кромочной конечной гибки наружному поверхностному участку первой гибочной матрицы или, соответственно, второй гибочной матрицы. Например, поверхность прессования выполнена в форме полосы, например, с шириной полосы в диапазоне от 3 до 150 мм. Поверхность прессования в контакте со стеклом ориентирована вверх. Кроме того, нажимная рама сформирована пригодной для поверхностной предварительной гибки под действием силы тяжести во внутренней области стекла, причем провисание внутренней области стекла возможно под действием силы тяжести вниз. Для этой цели нажимная рама может быть выполнена открытой, то есть, снабженной центральным сквозным проемом, или полностью открытой по всей площади, насколько это обеспечивает возможность провисания внутренней области стекла. Открытая конфигурация является предпочтительной с позиции более простой обработки стекла. Подразумевается, что бóльшая ширина полосовидной поверхности прессования благодаря лучшему распределению веса является предпочтительной из соображений предотвращения нежелательных маркировок (изменений плоских поверхностей стекла), причем вследствие прессования стекла в краевой области на нажимной раме можно противодействовать образованию маркировок. Поверхность прессования нажимной рамы имеет заданную геометрическую форму, причем нажимная рама для этой цели является достаточно жесткой. Например, нажимная рама сформирована как отливка, причем поверхность прессования создана, например, фрезерованием. При гибке под действием силы тяжести стекло предварительно выгибается под собственным весом. Благодаря предыдущему прижатию кромки стекла к поверхности прессования нажимной рамы может быть сокращено поверхностное предварительное прогибание стекла. Кроме того, благоприятным является применение упоров для фиксирования стекла во время переноса на нажимную раму.
При этом первая гибочная матрица и нажимная рама могут перемещаться относительно друг друга по вертикальному направлению так, что стекло может зажиматься в краевой области между наружным поверхностным участком первой гибочной матрицы и поверхностью прессования нажимной рамы. Тем самым стекло подвергается предварительной или конечной гибке в краевой области. Первая гибочная матрица предпочтительно связана с механическим приводом, посредством которого первая гибочная матрица может быть придвинута к нажимной раме.
Соответствующим образом вторая гибочная матрица и нажимная рама могут сдвигаться относительно друг друга по вертикальному направлению так, что стекло может зажиматься в краевой области между наружным поверхностным участком второй гибочной матрицы и поверхностью прессования нажимной рамы. Тем самым стекло подвергается предварительной или конечной гибке в краевой области. Вторая гибочная матрица предпочтительно связана с механическим приводом, посредством которого вторая гибочная матрица может быть придвинута к нажимной раме.
Благодаря проводимой многочисленными этапами гибке стекла в краевой и внутренней области может быть значительно сокращено время гибки на второй гибочной матрице, чтобы сократить продолжительности циклов. Кроме того, благодаря особенно точному позиционированию стекла посредством прижатия на нажимной раме могут быть изготовлены стекла со сложной формой при особенно высоком качестве.
Первая гибочная матрица и вторая гибочная матрица в каждом случае предпочтительно имеют устройство для фиксирования стекла на данной контактной поверхности. Устройство для фиксирования стекла на контактной поверхности предпочтительно включает пневматическое всасывающее устройство для всасывания газообразной текучей среды, в частности, воздуха, в результате чего стекло посредством пониженного давления может притягиваться к данной контактной поверхности. Для этой цели контактная поверхность оснащается, например, по меньшей мере одним впускным отверстием для всасывания, предпочтительно многочисленными впускными отверстиями для всасывания, например, равномерно распределенными по всей контактной поверхности, посредством которых в каждом случае на контактной поверхности может создаваться пониженное давление для всасывающего действия. Альтернативно или дополнительно, всасывающее устройство может иметь окаймляющий контактную поверхность фартук, посредством которого на контактной поверхности может создаваться разрежение. Как правило, всасывающее устройство создает направленный вверх поток газообразной текучей среды, в частности, воздуха, который является достаточным, чтобы прочно удерживать стекло на контактной поверхности. В частности, это позволяет размещать под стеклом раму для приема фиксируемого на контактной поверхности стекла.
Альтернативно или дополнительно, устройство для фиксирования стекла на контактной поверхности предпочтительно включает пневматическое дутьевое устройство для создания потока газообразной текучей среды, в частности, потока воздуха, которое сформировано так, что стекло обдувается снизу потоком газообразной текучей среды, благодаря этому приподнимается и может прижиматься к контактной поверхности первой или, соответственно, второй гибочной матрицы. В частности, дутьевое устройство может быть выполнено так, что зафиксированное на контактной поверхности стекло может подвергаться предварительному изгибанию под действием создаваемого потоком газообразной текучей среды давления в краевой области и/или во внутренней области, предпочтительно по меньшей мере в краевой области.
Как применяемый здесь в дальнейшем, термин «фиксирование» подразумевает закрепление стекла на контактной поверхности, причем стекло может прижиматься к контактной поверхности и/или присасываться к контактной поверхности. Фиксирование стекла на контактной поверхности не обязательно связано с процессом гибки. Контактные поверхности первой и второй гибочных матриц для контакта со стеклом в каждом случае ориентированы вниз.
Кроме того, соответствующее изобретению устройство включает модуль, далее называемый «подающим модулем», который образует конструкционный узел и предпочтительно, однако не обязательно, может перемещаться относительно гибочной зоны. Подающий модуль предпочтительно может быть пространственно отделен от гибочной зоны. Подающий модуль предпочтительно имеет активно или пассивно приводимое в действие перемещающее устройство для перемещения подающего модуля относительно гибочной зоны, например, роликовое транспортирующее устройство или транспортирующее устройство на воздушной подушке. Подающий модуль предпочтительно выполнен в форме подающей камеры, которая имеет полость подающей камеры, которая предпочтительно полностью окружена изолирующей стенкой. Посредством стенки полость подающей камеры отделяется от внешней среды. Полость подающей камеры предпочтительно является закрытой или, соответственно, закрываемой, и имеет по меньшей мере одно открывающееся в полость подающей камеры отверстие, которое предпочтительно может закрываться дверцей подающей камеры. В частности, полость подающей камеры путем закрывания отверстия может быть пространственно отделена от гибочной зоны (полости гибочной камеры) так, что отсутствует пространственное соединение между полостью подающей камеры и гибочной зоной. Более того, полость подающей камеры и гибочная зона (полость гибочной камеры) могут быть пространственно соединены между собой или отделены друг от друга стенкой, которая снабжена закрываемым отверстием.
Подающий модуль имеет подвижную каретку с предпочтительно стационарно (неподвижно) размещенной на каретке нажимной рамой для прижатия и транспортирования стекла. Каретка с нажимной рамой предпочтительно размещается в полости подающей камеры выполненного в виде подающей камеры подающего модуля, или, соответственно, может (целиком) размещаться в полости подающей камеры. Каретка может передвигаться относительно обеих гибочных матриц. В частности, каретка может перемещаться в положение, в котором она полностью уходит в полость подающей камеры (и также не размещается частично в гибочной зоне). В отличие от указанного вначале прототипа, нажимная рама не размещается на подвижных на каретке салазках, а перемещение нажимной рамы производится исключительно в результате движения каретки. Термин «нажимная рама» следует понимать так, что нажимная рама может служить для прижатия стекла, причем предпочтительным, однако не обязательным, является прижатие посредством нажимной рамы. В частности, нажимная рама может служить как транспортирующая рама исключительно для переноса стекла между гибочными матрицами (без прижатия).
Подающий модуль подается или, соответственно, может подаваться к гибочной зоне таким образом, что каретка с нажимной рамой (от положения снаружи гибочной зоны) может вводиться в гибочную зону. Предпочтительно выполненный в форме подающей камеры подающий модуль подается и, соответственно, может подаваться к выполненной в форме гибочной камеры гибочной зоне, причем полость подающей камеры может соединяться с полостью гибочной камеры. Для этой цели полость подающей камеры имеет по меньшей мере первое отверстие, которое может быть образовано в противолежащем относительно второго отверстия положении полости гибочной камеры так, что может создаваться предпочтительно соосное соединение полости подающей камеры и полости гибочной камеры. Первое отверстие полости подающей камеры и/или второе отверстие полости гибочной камеры предпочтительно в каждом случае снабжены дверцей, посредством которой может закрываться соответствующее отверстие. Существенной является возможность соединения полости подающей камеры и полости гибочной камеры, в частности, путем открывания по меньшей мере одной дверцы между полостью подающей камеры и полостью гибочной камеры.
Согласно изобретению, подающий модуль подводится или, соответственно, может подводиться к гибочной зоне таким образом, что нажимная рама на каретке в результате движения каретки (вводимой в гибочную зону снаружи гибочной зоны) между соответствующим первой гибочной матрице первым положением нажимной рамы и соответствующим второй гибочной матрице вторым положением нажимной рамы может передвигаться в боковом направлении относительно первой и второй гибочной матрицы. Первое положение нажимной рамы предпочтительно находится по вертикальному направлению (например, непосредственно) под первой гибочной матрицей, и второе положение нажимной рамы по вертикальному направлению (например, непосредственно) находится под второй гибочной матрицей. Нажимная рама предпочтительно может перемещаться в горизонтальной плоскости возвратно-поступательно (то есть, одномерно). Кроме того, каретка с нажимной рамой может сдвигаться (полностью) обратно в подающий модуль, причем предпочтительно, когда каретка с нажимной рамой может полностью входить в полость подающей камеры выполненного в форме подающей камеры подающего модуля.
В соответствующем изобретению устройстве перемещение нажимной рамы производится внутри гибочной зоны (например, гибочной камеры) в результате движения вводимой снаружи гибочной зоны каретки, что в особенно благоприятном случае обеспечивает возможность очень точного позиционирования нажимной рамы. Каретка для ее перемещения связана с приводным устройством. Фактически для удовлетворения очень высоких требований, предъявляемых к качеству получаемых стекол, требуется очень точное позиционирование стекол относительно гибочных матриц, как правило, с точностью менее 1 мм, типично менее, чем около 0,5 мм. Чтобы избежать ошибок вследствие теплового расширения в горячей гибочной зоне, приводное устройство для каретки может быть благоприятным образом размещено в холодной области снаружи горячей гибочной зоны в подающем модуле. Кроме того, благодаря этому обеспечивается возможность особенно быстрого позиционирования каретки, что представляет собой дополнительное важное преимущество изобретения, так как тем самым могут быть сокращены продолжительности циклов.
Каретка для нажимной рамы связана с размещенным на подающем модуле устройством для перемещения каретки, причем несущий нажимную раму участок каретки может вводиться в гибочную зону из подающего модуля и сдвигаться обратно в подающий модуль. В частности, нажимная рама в результате движения каретки может переводиться в положение, в котором она полностью входит в полость подающей камеры. Каретка посредством устройства для перемещения каретки может передвигаться таким образом, что нажимная рама внутри гибочной зоны может возвратно-поступательно перемещаться в боковом направлении между первым положением нажимной рамы и вторым положением нажимной рамы.
В одном предпочтительном варианте выполнения соответствующего изобретению устройства предусматривается по меньшей мере одно опорное устройство для поддерживания нажимной рамы и/или каретки в первом положении нажимной рамы и/или во втором положении нажимной рамы. В частности, в первом положении нажимной рамы и во втором положении нажимной рамы в каждом случае может размещаться отдельное опорное устройство, например, сервомотор или гидравлическое или пневматическое опорное устройство, посредством которого нажимная рама и/или каретка подпираются снизу. Благодаря этому нажимная рама может быть очень точно позиционирована, причем могут благоприятным образом предотвращаться изменения положения нажимной рамы, которые, в частности, обусловливаются контактом с находящейся над нею гибочной матрицей при соприкосновении с ней.
В дополнительном предпочтительном варианте выполнения соответствующего изобретению устройства на каретке может перемещаться по меньшей мере один соединяемый с первой и/или второй гибочной матрицей инструмент, например, посредством нанесенной на каретку инструментальной подставки. Инструмент может перемещаться в боковом направлении при движении каретки между подающим модулем и соответствующим первой гибочной матрице первым положением инструмента и/или соответствующим второй гибочной матрице вторым положением инструмента относительно первой и второй гибочной матрицы. Первое положение инструмента предпочтительно находится по вертикальному направлению (например, непосредственно) под первой гибочной матрицей, и второе положение инструмента предпочтительно находится по вертикальному направлению (например, непосредственно) под второй гибочной матрицей. Предпочтительно, однако не обязательно, первое положение нажимной рамы является идентичным первому положению инструмента, и второе положение нажимной рамы является идентичным второму положению инструмента. Устройство для перемещения каретки выполнено таким образом, что по меньшей мере один инструмент на каретке в результате движения каретки может перемещаться от подающего модуля в гибочную зону и от гибочной зоны к подающему модулю. В частности, каретка посредством устройства для перемещения каретки может быть подвижной так, что по меньшей мере один инструмент может возвратно-поступательно перемещаться в боковом направлении в первое положение инструмента или во второе положение инструмента. Этот вариант осуществления изобретения позволяет особенно просто и быстро провести оснащение гибочной матрицы инструментом, в частности, выполнить замену инструмента, причем по меньшей мере один инструмент на каретке может транспортироваться при движении каретки от подающего модуля к первому или второму положению инструмента, чтобы оснастить первую гибочную матрицу и, соответственно, гибочную матрицу. С другой стороны, инструмент может быть простым путем опять выведен из гибочной зоны, будучи размещенным на каретке.
Предпочтительно, чтобы соединяемый с первой гибочной матрицей первый инструмент и соединяемый со второй гибочной матрицей второй инструмент могли одновременно транспортироваться на каретке, причем в результате движения каретки первый инструмент может сдвигаться в боковом направлении между гибочной камерой и первым положением инструмента, и второй инструмент между гибочной камерой и вторым положением инструмента относительно первой и второй гибочной матрицы. Для этой цели является предпочтительным, когда оба инструмента могут быть размещены на каретке с таким расстоянием между ними, которое соответствует расстоянию между первым и вторым положениями инструмента. Тем самым может быть особенно простым и быстрым путем выполнена замена инструмента на обеих гибочных матрицах.
Особенно предпочтительно, когда по меньшей мере один инструмент перед оснащением гибочной матрицы размещается в нагреваемой полости подающей камеры выполненного как подающая камера подающего модуля. Этим путем может очень быстро проводиться обработка стекол в гибочной зоне при замене инструмента, без необходимости в проведении занимающего много времени нагревания инструмента. В частности, это справедливо при замене обоих инструментов на гибочных матрицах. Для этого подающая камера оснащается нагреваемой полостью подающей камеры, в которой может нагреваться по меньшей мере один инструмент.
В отношении нагреваемой полости подающей камеры является особенно благоприятным, когда устройство для перемещения каретки, по меньшей мере частично, размещается снаружи нагреваемой (горячей) полости подающей камеры. Тем самым может благоприятным образом предотвращаться нежелательное нагревание деталей устройства для перемещения каретки и связанных с этим обусловленных тепловым воздействием изменений длины. Это существенным образом содействует тому, что каретка и в особенности закрепленная на ней нажимная рама позиционируются с особенно высокой точностью и с высокой скоростью, так что стекла могут быть изготовлены с особенно высокими требованиями к качеству.
Кроме особенно точного позиционирования нажимной рамы, подвижный подающий модуль обеспечивает возможность простого быстрого оснащения гибочных матриц гибочной зоны предпочтительно нагретыми инструментами. Например, могут быть предусмотрены многочисленные подвижные подающие модули, которые оснащены различающимися между собой инструментами, чтобы гибочная зона сообразно потребности могла быть оснащена различными инструментами. Равным образом, возможно простое техническое обслуживание и, соответственно, смена инструментов гибочных матриц. При этом в каждом случае только один подающий модуль подводится к гибочной зоне.
В отношении подающего модуля, предпочтительно подающей камеры, речь идет об автономном конструкционном узле, который обеспечивает возможность оснащения подающего модуля инструментом(-ами) и/или нажимной рамой, а также замены инструмента(-тов) и/или нажимной рамы в подающем модуле независимо от гибочной зоны. В частности, возможность выведения каретки наружу позволяет просто и быстро провести оснащение подающего модуля.
Если подающий модуль, предпочтительно подающая камера, является подвижным, подающий модуль может быть подведен к гибочной зоне, предпочтительно гибочной камере, и опять отведен от нее. Это создает, в частности, свободный доступ к гибочной зоне, чтобы проводить работы по техническому обслуживанию или приведению в соответствие с определенным процессом гибки.
Кроме того, соответствующее изобретению устройство предпочтительно имеет зону предварительного нагревания с нагревательным устройством для нагревания стекол до температуры гибки, а также транспортирующее устройство, в частности, типа рольганга, для транспортирования стекол из зоны предварительного нагревания к гибочной зоне, в частности, к приемному положению (например, непосредственно) под первой гибочной матрицей. Рольганг предпочтительно сформирован так, что отдельные стекла могут транспортироваться друг за другом к приемному положению. В частности, приемное положение может соответствовать концевому участку рольганга.
Кроме того, соответствующее изобретению устройство предпочтительно имеет зону термической закалки с охлаждающим устройством для термической закалки стекла, причем закалочная рама (например, закалочное кольцо) может возвратно-поступательно перемещаться в боковом направлении для переноса стекла от соответствующего второй гибочной матрице первого положения закалочной рамы, которое, в частности, может быть идентичным второму положению нажимной рамы, ко второму положению закалочной рамы в зоне закалки относительно второй гибочной матрицы (то есть, по меньшей мере с одним горизонтальным параметром движения). Закалочная рама предпочтительно может перемещаться в горизонтальной плоскости возвратно-поступательно (одномерно). В результате термической закалки (отжига) целенаправленно создается разность температур между поверхностной зоной и сердцевинной зоной стекла, чтобы повысить сопротивление излому стекла. Закалка стекла предпочтительно производится посредством устройства для обдувания стекла газообразной текучей средой, предпочтительно воздухом. В предпочтительном варианте обе поверхности стекла одновременно подвергаются воздействию охлаждающим потоком воздуха.
При боковом смещении нажимной рамы и закалочной рамы в каждом случае переносится одно стекло, причем на обеих гибочных матрицах могут одновременно обрабатываться два стекла, тогда как третье стекло может находиться в закалочной зоне. В результате предпочтительно возвратно-поступательного движения нажимной рамы и/или закалочной рамы отдельные стекла могут эффективно и быстро переноситься между различными инструментами. Посредством проводимой многочисленными этапами гибки стекла в краевой и внутренней области может быть значительно сокращено время гибки на второй гибочной матрице, чтобы сократить продолжительности циклов. Кроме того, благодаря этому могут быть с высоким качеством изготовлены также оконные стекла со сложной геометрией.
Закалочная рама для транспортирования стекла от гибочной зоны к закалочной зоне предпочтительно имеет сформированную пригодной для кромочной конечной гибки стекла (5) поверхность рамы. Кроме того, является предпочтительным, когда закалочная рама сформирована пригодной для поверхностной конечной гибки под действием силы тяжести во внутренней области стекла. Во время транспортирования на закалочной раме могут быть под действием силы тяжести достигнуты кромочная конечная гибка и поверхностная конечная гибка.
Согласно одному варианту осуществления изобретения, зона предварительного нагревания выполнена в форме камеры для предварительного нагревания, которая имеет полость камеры для предварительного нагревания, которая предпочтительно полностью окружена изолирующей стенкой. Посредством стенки полость камеры для предварительного нагревания отделяется от внешней среды. Например, полость камеры для предварительного нагревания предпочтительно является закрытой или, соответственно, закрываемой, и имеет по меньшей мере одно открывающееся в полость камеры для предварительного нагревания отверстие, которое предпочтительно может закрываться дверцей камеры для предварительного нагревания. Полость камеры для предварительного нагревания может быть соединена с гибочной зоной, в частности, с полостью гибочной камеры, выполненной как гибочная камера гибочной зоны, чтобы направлять изогнутые стекла во второе положение закалочной рамы. Предпочтительно, однако не обязательно, второе положение нажимной рамы идентично первому положению закалочной рамы. Закалочная рама связана с устройством для перемещения закалочной рамы, посредством которого закалочная рама может возвратно-поступательно перемещаться в боковом направлении между первым положением закалочной рамы и вторым положением закалочной рамы относительно первой и второй гибочной матрицы. Устройство для перемещения закалочной рамы не связано с кареткой для нажимной рамы.
Соответствующее изобретению устройство для гибки оконных стекол служит, в частности, для выполнения описываемого далее соответствующего изобретению способа. В этом отношении в рамках описания соответствующего изобретению способа будет приводиться ссылка на вышеуказанные варианты выполнения соответствующего изобретению устройства. Способ включает следующие (например, последовательные) стадии:
стадию, в которой нагретое до температуры гибки стекло размещается в соответствующем первой гибочной матрице приемном положении.
Следующая стадия, в которой стекло фиксируется на контактной поверхности первой гибочной матрицы. Фиксирование стекла на контактной поверхности первой гибочной матрицы предпочтительно выполняется таким образом, что стекло приподнимается нагнетанием газообразной текучей среды и прижимается к контактной поверхности первой гибочной матрицы. Альтернативно и предпочтительно в дополнение, стекло фиксируется на контактной поверхности первой гибочной матрицы присасыванием. Например, однако не обязательно, стекло на контактной поверхности первой гибочной матрицы подвергается кромочной предварительной гибке в краевой области и/или поверхностной предварительной гибке во внутренней области стекла.
Стадия, в которой нажимная рама для стекла позиционируется в соответствующем первой гибочной матрице первом положении нажимной рамы, в частности, в то время как стекло зафиксировано на первой гибочной матрице.
Стадия, в которой стекло укладывается на нажимную раму. Если нажимная рама сформирована как нажимная рама, способ может включать дополнительную стадию, в которой стекло зажимается между первой гибочной матрицей и нажимной рамой, причем выполняется кромочная предварительная гибка или кромочная конечная гибка в краевой области стекла.
Стадия, в которой стекло на нажимной раме транспортируется в соответствующее второй гибочной матрице второе положение нажимной рамы. Во время транспортирования стекла на нажимной раме предпочтительно производится поверхностная предварительная гибка в окруженной краевой областью внутренней области стекла под действием силы тяжести. В частности, тогда является особенно благоприятным, когда стекло было зажато между первой гибочной матрицей и выполненной в виде нажимной рамы нажимной рамой. Если нажимная рама сформирована как нажимная рама, способ может включать дополнительную стадию, в которой стекло зажимается между второй гибочной матрицей и нажимной рамой, причем выполняется кромочная предварительная гибка или кромочная конечная гибка в краевой области стекла.
Стадия, в которой стекло фиксируется на контактной поверхности второй гибочной матрицы. При этом, например, может проводиться поверхностная предварительная гибка или поверхностная конечная гибка во внутренней области и кромочная предварительная гибка или кромочная конечная гибка в краевой области стекла. Стекло предпочтительно фиксируется на контактной поверхности второй гибочной матрицы присасыванием.
При этом является существенным, что нажимная рама закрепляется на подводимой от подающего модуля (предпочтительно подающей камеры) в гибочную зону (предпочтительно гибочную камеру) каретке, причем нажимная рама вследствие движения каретки между первым положением нажимной рамы и вторым положением нажимной рамы является подвижной в боковом направлении относительно первой и второй гибочной матрицы. Подающий модуль предпочтительно является подвижным и подводится к гибочной зоне.
В предпочтительном варианте осуществления изобретения нажимная рама и/или каретка подпираются внизу в первом положении нажимной рамы и/или втором положении нажимной рамы.
В дополнительном предпочтительном варианте выполнения соответствующего изобретению способа по меньшей мере один соединяемый с первой гибочной матрицей и/или второй гибочной матрицей инструмент транспортируется на каретке между подающим модулем и гибочной зоной. Особенно предпочтительно по меньшей мере один инструмент нагревается в подающем модуле перед транспортированием в гибочную зону.
В одном предпочтительном варианте выполнения соответствующего изобретению способа способ включает дополнительную стадию, в которой стекло транспортируется на (холодной) закалочной раме к охлаждающему устройству для термической закалки стекла. Во время транспортирования на закалочной раме может проводиться поверхностная конечная гибка во внутренней области стекла под действием силы тяжести.
В то время как стекло зафиксировано на второй гибочной матрице, закалочная рама предпочтительно позиционируется для закалки стекла в соответствующем второй гибочной матрице первом положении закалочной рамы, стекло укладывается на закалочную раму, и закалочная рама перемещается в боковом направлении от второй гибочной матрицы между первым положением закалочной рамы и вторым положением закалочной рамы для закалки стекла. Закалочная рама предпочтительно движется возвратно-поступательно (двунаправленно) (одномерно) в горизонтальной плоскости между первым положением закалочной рамы и вторым первым положением закалочной рамы.
В одном предпочтительном варианте выполнения соответствующего изобретению способа в результате зажимания стекла между первой гибочной матрицей и нажимной рамой производится кромочная предварительная гибка в краевой области стекла. Затем в результате прессования стекла между второй гибочной матрицей и нажимной рамой производится дополнительная кромочная предварительная гибка в краевой области стекла. Затем во время транспортирования стекла на закалочной раме выполняется кромочная конечная гибка стекла.
В дополнительном предпочтительном варианте выполнения соответствующего изобретению способа прессованием стекла между первой гибочной матрицей и нажимной рамой производится кромочная предварительная гибка в краевой области стекла. Затем прессованием стекла между второй гибочной матрицей и нажимной рамой выполняется кромочная конечная гибка в краевой области стекла.
В дополнительном предпочтительном варианте выполнения соответствующего изобретению способа прессованием стекла между первой гибочной матрицей и нажимной рамой производится кромочная конечная гибка в краевой области стекла.
Гибкой на второй гибочной матрице стеклу может быть придана конечная или, соответственно, почти окончательная форма. Обычно, однако не обязательно, форма стекла на закалочной раме еще изменяется (как правило, незначительно), для каковой цели закалочная рама предпочтительно имеет поверхность рамы, которая сформирована пригодной для кромочной конечной гибки. Кроме того, закалочная рама сформирована пригодной для поверхностной конечной гибки под действием гравитации. Тем самым стекло приобретает свою окончательную форму на закалочной раме.
Кроме того, изобретение распространяется на применение соответствующего изобретению устройства, а также соответствующего изобретению способа получения оконных стекол, для средств передвижения для движения по земле, по воздуху или по воде, в частности, для автомобилей, и в особенности для автомобильных задних стекол.
Различные варианты осуществления изобретения могут быть осуществлены по отдельности или в любых комбинациях. В частности, вышеуказанные и разъясняемые ниже признаки могут быть применимыми не только к приведенным комбинациям, но также к другим комбинациям или в одиночку, без выхода за пределы области настоящего изобретения.
Теперь изобретение будет более подробно разъяснено посредством примеров осуществления, причем будет приводиться ссылка на сопроводительные фигуры. Как показано в упрощенном, выполненном не в масштабе изображении:
Фиг. 1 представляет схематическое изображение в разрезе примерного варианта выполнения соответствующего изобретению устройства для гибки оконных стекол;
Фиг. 2-3 представляют дополнительные схематические изображения устройства из Фиг. 1 в различных фазах соответствующего изобретению способа;
Фиг. 4-10 представляют соответствующее изобретению устройство для гибки оконных стекол из Фиг. 1 без подающего модуля в различные моменты времени;
Фиг. 11А-11В представляют схематические изображения для разъяснения прессования стекла между первым гибочным инструментом и нажимной рамой;
Фиг. 12 представляет технологическую блок-схему соответствующего изобретению способа получения оконного стекла.
Сначала рассматриваются Фигуры 1 и 4, в которых посредством схематических изображений наглядно разъясняется примерный вариант выполнения соответствующего изобретению устройства в виде в поперечном разрезе. С помощью Фигуры 1 описываются существенные компоненты обозначенного в целом кодовым номером 1 позиции устройства для гибки оконных стекол. В Фигуре 4 представлен увеличенный фрагмент устройства 1 для гибки оконных стекол из Фигуры 1 без подающего модуля 38.
Устройство 1 включает гибочную зону, которая здесь в качестве примера выполнена как закрытая или, соответственно, закрываемая гибочная камера 2 для гибки (стеклянных) пластин 5, размещенную сбоку от гибочной камеры 2 зону 3 предварительного нагревания с нагревательным устройством для нагревания стекол 5 до температуры гибки, которая в Фиг. 1 подробнее не представлена, так как она в показанных изображениях находится позади гибочной зоны 2, а также размещенную сбоку от гибочной камеры 2 закалочную зону 4 для охлаждения и, соответственно, закалки изогнутых стекол 5. Закалочная зона 4 примыкает к гибочной зоне 2 сбоку справа. Зона 3 предварительного нагревания и закалочная зона 4 в виде сверху размещаются под углом 90° к гибочной зоне 2 и функционируют во взаимодействии с нею. Зона 3 предварительного нагревания, гибочная камера 2 и закалочная зона 4 здесь в каждом случае составляют пространственно разделенные области устройства. Гибочная камера 2 снабжена изолирующей стенкой 36 гибочной камеры, которая отделяет полость гибочной камеры 2, далее называемой полостью 37 гибочной камеры, от внешней среды. Благодаря этому полость 38 гибочной камеры может быть нагрета до надлежащей для процесса гибки стекол 5 температуры (температуры гибки) и поддерживаться при ней. Для нагревания полости 37 гибочной камеры гибочная камера 2 имеет нагревательное устройство, которое в Фигуре 1 подробнее не представлено.
В устройстве 1 стекла 5 могут последовательно транспортироваться от зоны 3 предварительного нагревания в гибочную камеру 2, и затем в закалочную зону 4. Для транспортирования стекол 5 от зоны 3 предварительного нагревания в гибочную камеру 2 предусмотрено устройство 6 для транспортирования стекол, которое здесь в качестве примера включает рольганг 7 с цилиндрическими роликами 8 для плоскостной укладки стекол 5. Ролики 8 с их ориентированными горизонтально осями вращения, например, здесь параллельно х-направлению, установлены вращающимися активно и/или пассивно. Посредством роликов 8 нагретые в зоне 3 предварительного нагревания до температуры гибки стекла 5 в каждом случае по отдельности друг за другом подаются в приемное положение 22 в полости 37 гибочной камеры в гибочной камере 2. Направление транспортирования стекла 5 является перпендикулярным плоскости чертежа.
Гибочная камера 2 имеет в полости 37 гибочной камеры две отдельных гибочных секции 9, 9’, причем первая гибочная секция 9 и вторая гибочная секция 9’ размещаются пространственно смещенными друг от друга в горизонтальном х-направлении. В описании обеих гибочных секций 9, 9’ ссылочное обозначение «’» в каждом случае относится к компоненту второй гибочной секции 9’, причем компоненты обеих гибочных секций также могут не иметь знак «’», когда это представляется уместным. Для упрощения ссылки все компоненты второй гибочной секции 9’ также называются «вторыми» компонентами», в отличие от компонентов первой гибочной секции 9, которые также называются «первыми» компонентами.
Гибочные секции 9, 9’ в каждом случае имеют вертикальную подвеску 10, 10’ для разъемного крепления гибочного инструмента 11, 11’. Подвески 10, 10’ посредством не изображенного подробнее устройства 13, 13’ для перемещения подвески могут смещаться в каждом случае в вертикальном направлении. Необязательно подвески 10, 10’ посредством устройства 13, 13’ для перемещения подвески могут смещаться в сторону также в каждом случае в горизонтальном направлении по меньшей мере с одним параметром движения, в частности, в положительном или, соответственно, отрицательном х-направлении. На нижнем конце подвесок 10, 10’ в каждом случае разъемно смонтирован гибочный инструмент 11, 11’. Каждый гибочный инструмент 11, 11’ имеет ориентированную вниз выпуклую контактную поверхность 14, 14’ для прилегающего плоского стекла 5. Под соответствующим контактным давлением стекло может изгибаться на данной контактной поверхности 14, 14’. Обе контактных поверхности 14, 14’ имеют для этого в каждом случае концевой или, соответственно, краевой наружный поверхностный участок 15, 15’ и внутренний поверхностный участок 16, 16’ с отличающимися друг от друга поверхностными контурами (формами поверхности), причем внутренний поверхностный участок 16, 16’ со всех сторон окружен (окаймлен) наружным поверхностным участком 15, 15’.
Наряду с отличающимися друг от друга поверхностными контурами наружного поверхностного участка 15, 15’ и внутреннего поверхностного участка 16, 16’ одного и того же гибочного инструмента 11, 11’, контактные поверхности 14, 14’ обоих гибочных инструментов 11, 11’ также имеют различающиеся контуры поверхности. Более конкретно, наружный поверхностный участок 15 имеет контактную поверхность 14 первого гибочного инструмента 11, которая соответствует желательной кромочной конечной гибке, то есть, окончательной гибке, в одной (например, прямолинейной) краевой области 17 стекла 5, то есть, обеспечивает возможность такой конечной гибки. Концевая краевая область 17 стекла 5 примыкает к размещенной перпендикулярно обеим противолежащим относительно друг друга основным поверхностям стекла кромке 19 (обреза) стекла. Внутренний поверхностный участок 16 контактной поверхности 14 первого гибочного инструмента 11 имеет контур поверхности, который соответствует поверхностной предварительной гибке, то есть, неокончательной гибке, в полностью окруженной краевой областью 17 внутренней области 18 стекла 5. Наружный поверхностный участок 15’ контактной поверхности 14’ второго гибочного инструмента 11’ имеет такой же контур поверхности, как контактная поверхность 14 наружного поверхностного участка 15 первого гибочного инструмента 11, и имеет контур поверхности, который соответствует желательной кромочной конечной гибке в краевой области 17 стекла 5. В отличие от внутреннего поверхностного участка 16 контактной поверхности 14 первого гибочного инструмента 11, внутренний поверхностный участок 16’ контактной поверхности 14’ второго гибочного инструмента 11’ имеет контур поверхности, который согласуется с поверхностной конечной гибкой, то есть, окончательной или, соответственно, почти конечной гибкой, во внутренней области 18 стекла 5, или же обеспечивает возможность дополнительной обработки. Первая подвеска 10 совместно с первым гибочным инструментом 11 образует первую гибочную матрицу 12. Соответствующим образом, вторая подвеска 10’ совместно со вторым гибочным инструментом 11’ образует вторую гибочную матрицу 12’.
Обе гибочных секции 9, 9’ в каждом случае снабжены всасывающим устройством 20, 20’ для присасывания стекла 5 к контактной поверхности 14, 14’. Контактные поверхности 14, 14’ могут быть оснащены для этого, например, равномерно распределенными впускными отверстиями для всасывания (не показаны), и/или окаймляющим по периметру фартуком. Посредством создаваемого разрежения и, соответственно, вакуума, стекло 5 может быть притянуто к контактной поверхности 14, 14’.
Кроме того, первая гибочная секция 9 имеет не представленное подробнее дутьевое устройство 21, через которое может создаваться поток газообразной текучей среды, например, поток 33 воздуха, по вертикальному направлению сквозь рольганг 7 в приемном положении 22. Посредством этого стекло 5 из приемного положения 22 может быть приподнято по направлению к гибочной матрице 12. Приемное положение 22 находится по вертикальному направлению непосредственно под гибочным инструментом 11 первой гибочной матрицы 12.
Кроме того, устройство 1 включает перемещаемую (подвижную) подающую камеру 38, которая размещена с противоположной стороны относительно закалочной зоны 4 на наружной стороне гибочной камеры 2. Как и гибочная камера 2, подающая камера 38 выполнена в форме закрытой и, соответственно, закрываемой камеры. Подающая камера 38 для этой цели включает изолирующую стенку 39 подающей камеры, которой полость подающей камеры 38, далее называемой полостью 40 подающей камеры, отделена от внешней среды. Полость 40 подающей камеры является доступной снаружи посредством по меньшей мере одного открывающегося в полость 40 подающей камеры отверстия 43 подающей камеры. Отверстие 43 подающей камеры может закрываться дверцей 44 подающей камеры так, что полость 40 подающей камеры может открываться и отгораживаться от внешней среды. Как показано в Фигуре 1, подающая камера 38 размещается с наружной стороны гибочной камеры 2, причем отверстие 43 подающей камеры находится в положении напротив первого отверстия 45 гибочной камеры полости 37 гибочной камеры. Полость 37 гибочной камеры доступна снаружи через открывающееся в полость 37 гибочной камеры первое отверстие 45 гибочной камеры. Первое отверстие 45 гибочной камеры может закрываться первой дверцей 46 гибочной камеры.
Если подающая камера 38 размещается на гибочной камере 2, то открыванием как дверцы 44 подающей камеры, так и первой дверцы 46 гибочной камеры полость 37 гибочной камеры и полость 40 подающей камеры могут быть пространственно соединены между собой. С другой стороны, закрыванием дверцы 44 подающей камеры и/или первой дверцы 46 гибочной камеры полость 40 подающей камеры может быть пространственно отделена от полости 37 гибочной камеры.
Подающая камера 38 может двигаться относительно гибочной камеры 2, и имеет для этого активно или пассивно приводимое в действие устройство 42 для перемещения подающей камеры, чтобы передвигать подающую камеру 38, которое в данном примере выполнения выполнено в виде действующих с подачей сжатого воздуха платформ 47 на воздушной подушке для создания воздушной подушки под подающей камерой 38, на которой может быть подвешена подающая камера 38. Однако также представимо устройство 42 для перемещения подающей камеры, выполненное в форме, например, роликовой опоры. С помощью устройства 42 для перемещения подающей камеры подающая камера 38 может придвигаться к гибочной камере 3 или отводится от гибочной камеры 2.
Полость 40 подающей камеры окружена изолирующей стенкой 39 подающей камеры. Тем самым полость 40 подающей камеры может быть нагрета до желательной температуры и поддерживаться при ней. Например, полость 40 подающей камеры, как и гибочная камера 2, нагревается до надлежащей для процесса гибки стекла 5 температуры (температуры гибки) и поддерживается при ней. Для нагревания полости 40 подающей камеры подающая камера 38 имеет нагревательное устройство 41 подающей камеры, которое в варианте выполнения согласно Фигуре 1 выполнено в форме радиационных нагревателей. Радиационные нагреватели размещены распределенными в многочисленных зонах радиационного нагрева.
Кроме того, подающая камера 38 имеет удлиненную каретку 27 для нажимной рамы 25. Каретка 27 может двигаться посредством устройства 26 для перемещения каретки. Устройство 26 для перемещения каретки включает салазки 48, на которых размещена каретка 27, причем салазки 48 могут двигаться вдоль удлиненной направляющей 49 салазок, которая полностью входит в полость 40 подающей камеры. Кроме того, устройство 26 для перемещения каретки включает приводное устройство 50, которое может возвратно-поступательно двигать салазки 48 вместе с кареткой 27 вдоль направляющей 49 салазок. Как показано в Фигуре 1, направляющая 49 салазок является протяженной до гибочной камеры 2, причем участок каретки 27 при открытой дверце 44 подающей камеры и открытой дверце 46 гибочной камеры может быть введен в полость 37 гибочной камеры, для чего салазки 48 передвигаются вдоль направляющей 49 салазок по направлению к гибочной камере 2. С другой стороны, каретка 27 при движении салазок 48 в противоположном направлении может выводиться из полости 37 гибочной камеры и полностью вдвигаться в полость 40 подающей камеры. Приводное устройство 50 для каретки 27 размещается снаружи нагреваемой полости 40 подающей камеры (в Фигуре 1 под полостью 40 подающей камеры). В принципе приводное устройство 50 может быть сформировано любым образом, пока обеспечивается возможность точного позиционирования каретки 27. В показанном примере выполнения приводное устройство 50 выполнено в форме оснащенного приводной шестерней шестеренчато-цепного устройства, которое известно специалисту и не должно разъясняться более подробно. В представленной в Фигуре 1 ситуации каретка 27 введена в гибочную камеру 2 и тем самым находится частично в полости 40 подающей камеры и частично в полости 37 гибочной камеры. Дверца 44 подающей камеры и дверца 46 гибочной камеры в каждом случае находятся в открытом положении. Понятно, что подающая камера 39 и гибочная камера 2, в том числе их компоненты, выполнены так, что несущий нажимную раму участок каретки 27 может быть введен из полости 40 подающей камеры в полость 37 гибочной камеры.
Нажимная рама 25, которая служит для транспортирования стекла 5, жестко закреплена на свободном конце каретки 27. Каретка 27 для этого включает, например, два параллельных несущих кронштейна 52, между которыми закреплена нажимная рама 25. Если каретка 27 (частично) вдвинута в полость 37 гибочной камеры, в результате движения каретки 27 нажимная рама 25 может (возвратно-поступательно) перемещаться в боковом направлении внутри полости 37 гибочной камеры относительно первой и второй гибочной матрицы 12, 12’. В частности, нажимная рама 25 в результате движения каретки 27 может перемещаться между соответствующим первой гибочной матрицы 12 первым положением 23 нажимной рамы и соответствующим второй гибочной матрицы 12’ вторым положением 24 нажимной рамы. Первое положение 23 нажимной рамы предпочтительно находится по вертикальному направлению (например, непосредственно) под первой гибочной матрицей 12, и второе положение 24 нажимной рамы находится по вертикальному направлению (например, непосредственно) под второй гибочной матрицей 12’. В Фигуре 1 показана ситуация, в которой транспортирующая рама 25 находится в первом положении 23 нажимной рамы. Во втором положении 24 нажимной рамы находится закалочная рама 30. Второе положение 24 нажимной рамы здесь идентично первому положению закалочной рамы, причем закалочная рама 30 посредством устройства 24 для перемещения закалочной рамы может возвратно-поступательно передвигаться между первым положением 24 закалочной рамы и вторым положением 32 закалочной рамы внутри закалочной зоны 4.
В соответствующем изобретению устройстве 1 перемещение нажимной рамы 25 внутри гибочной камеры 2 производится вводимой снаружи гибочной камеры 2 кареткой 27, причем приводное устройство 50 размещается вне нагреваемой полости 40 подающей камеры так, что в особенно благоприятном случае обеспечивается возможность очень точного позиционирования нажимной рамы 25.
Как показано в Фигуре 1, как в первом положении 23 нажимной рамы, так и во втором положении 24 нажимной рамы в каждом случае внизу размещается опорное устройство 51, 51’ для поддерживания каретки 27. Здесь опорное устройство 51, 51’ в каждом случае выполнено, например, как гидравлическое или пневматическое опорное устройство. Тем самым нажимная рама 25 может быть очень точно позиционирована в первом положении 23 нажимной рамы и, соответственно, во втором положении 24 нажимной рамы без изменения положения, в особенности вследствие контакта с первой гибочной матрицей 12 и, соответственно, второй гибочной матрицей 12’ при соприкосновении с ними, чтобы дополнительно повысить точность обработки стекол. В Фигуре 1 показана ситуация, в которой нажимная рама 25 и, соответственно, каретка 27 подпираются опорным устройством 51.
Теперь приводится ссылка на Фигуру 2, в которой устройство 1 для гибки оконных стекол 5 показано в другой ситуации выполнения способа, нежели в Фигуре 1. Чтобы избежать ненужных повторений, разъясняются только отличия от Фигуры 1, и в остальном будет приводиться ссылка на вышеуказанные варианты выполнения. В ситуации согласно Фигуре 2 закалочная рама 30 переместилась от первого положения 24 закалочной рамы во второе положение 32 закалочной рамы внутри закалочной зоны 4. Нажимная рама 25 при движении каретки 27 переместилась от первого положения 23 нажимной рамы во второе положение 24 нажимной рамы. Во втором положении 24 нажимной рамы нажимная рама 25 и, соответственно, каретка 27 подпираются снизу вторым опорным устройством 51’.
Теперь приводится ссылка на Фигуру 3, в которой устройство 1 для гибки оконных стекол 5 показано в другой ситуации выполнения способа, нежели в Фигуре 2. Чтобы избежать ненужных повторений, разъясняются только отличия от Фигуры 1, и в остальном будет приводиться ссылка на вышеуказанные варианты выполнения. В ситуации согласно Фигуре 3 каретка 27 при движении салазок 48 на направляющей 49 салазок полностью переместилась обратно полость 40 подающей камеры. На каретке 27 размещены оба инструмента 11, 11’ первой и второй гибочной матрицы 12, 12’. Например, инструмент 11 первой гибочной матрицы 12 размещается на (подробнее не представленной) инструментальной подставке 53 на каретке 27. Другой инструмент 11’ второй гибочной матрицы 12’ размещается, например, на нажимной раме 25, которая служит в качестве инструментальной подставки 53’. Для этой цели каретка 27 передвинулась так, что инструмент 11 мог быть уложен на первую инструментальную подставку 53, и инструмент 11’ мог быть размещен на второй инструментальной подставке 53’. При этом первая инструментальная подставка 53 была приведена в первое положение инструмента, которое идентично первому положению 23 нажимной рамы. Соответственным путем, вторая инструментальная подставка 53’ была приведена во второе положение инструмента, которое идентично второму положению 24 нажимной рамы. Первая инструментальная подставка 53 и вторая инструментальная подставка 53’ для этой цели размещаются на таком расстоянии друг от друга, которое соответствует расстоянию между первым положением 23 нажимной рамы и вторым положением 24 нажимной рамы. Для укладки обоих инструментов 11, 11’ обе гибочных матрицы 12, 12’ в каждом случае переместились вниз по вертикальному направлению. Затем каретка 27 с размещенными на ней инструментами 11, 11’ полностью передвинулась в полость 40 подающей камеры. Возможность транспортирования обоих инструментов 11, 11’ посредством каретки 27 позволяет просто и быстро проводить замену инструментов на обеих гибочных матрицах 12, 12’. В особенно благоприятной ситуации инструменты перед оснащением обеих гибочных матриц 12, 12’ нагреваются в полости 40 подающей камеры, благодаря чему можно избежать занимающего много времени разогревания в полости 37 гибочной камеры. Кроме того, возможно простое техническое обслуживание инструментов. Полость 40 подающей камеры может отгораживаться от внешней среды закрыванием дверцы 44 подающей камеры, что обеспечивает возможность быстрого нагревания инструментов в полости 40 подающей камеры. Особенно благоприятным образом полость 37 гибочной камеры в гибочной камере 2 также может быть закрыта закрыванием первой дверцы 46 гибочной камеры. Чтобы гибочная камера 2 могла быть закрыта, подающий модуль может быть простым путем отведен от гибочной камеры 2, без подвергания полости 37 гибочной камеры воздействию внешней среды, причем, в частности, может быть предотвращено сильное снижение температуры в полости гибочной камеры. Соответственно этому, к гибочной камере 2 может быть простым путем присоединен другой подающий модуль. При закрытой полости 40 подающей камеры размещенные в полости 40 подающей камеры инструменты могут быть эффективно и быстро нагреты. Тем самым обеспечивается возможность быстрой замены подающих модулей на гибочной камере, в частности, чтобы быстро и экономично вводить в действие различные инструменты на гибочной матрицах 12, 12’.
Нажимная рама 25 служит в устройстве 1 для прижатия и транспортирования стекла 5. Для этой цели нажимная рама 25 имеет краевую (например, полосовидную) нажимную поверхность 28 (смотри Фигуры 11А и 11В), контур поверхности которых комплементарны контуру поверхности наружных поверхностных участков 14, 14’ гибочных инструментов 11, 11’ первой гибочной матрицы 12 и второй гибочной матрицы 12’. Обращенная вверх поверхность 28 прессования предназначена для прижатия уложенного стекла 5 к краевой области 17. Нажимная рама 25 сформирована не по всей площади, но имеет находящийся внутри сквозной проем, который дополнительно обеспечивает возможность поверхностной предварительной гибки внутренней области 18 прилегающего к нему стекла 5 под действием силы тяжести.
Примыкающая сбоку к гибочной камере 2 закалочная зона 4 имеет два так называемых закалочных бокса 29, которые размещены смещенными друг относительно друга по вертикальному направлению. Посредством обоих закалочных боксов 29 в каждом случае может создаваться поток воздуха для воздушного охлаждения находящегося между обоими закалочными боксами 29 стекла 5, чтобы вызывать предварительное напряжение в изогнутом стекле 5. Закалочная рама 30 служит для транспортирования и укладки во время закалки изогнутого стекла 5. Закалочная рама 30 может смещаться в сторону с помощью устройства 31 для перемещения закалочной рамы, которое подробнее не представлено, вдоль по меньшей мере одного параметра горизонтального перемещения относительно гибочной секции 2. Более конкретно, закалочная рама 30 может возвратно-поступательно перемещаться в горизонтальной плоскости взад и вперед между первым положением 24 закалочной рамы и вторым положением 32 закалочной рамы, которое находится между обоими закалочными боксами 29 закалочной секции 4. Полость 37 гибочной камеры доступна снаружи через открывающееся в полость 37 гибочной камеры второе отверстие 54 гибочной камеры. Второе отверстие 54 гибочной камеры может закрываться второй дверцей 35 гибочной камеры так, что полость 37 гибочной камеры может быть открыта наружу и может быть отгорожена от внешней среды. Закалочная рама 35 может передвигаться через второе отверстие 54 гибочной камеры в полость 37 гибочной камеры, чтобы принять готовое изогнутое стекло 5 и транспортировать в закалочную зону 4. Оттуда стекло 5 может быть простым путем извлечено и подвергается дальнейшей обработке.
Теперь приводится ссылка на Фигуры 4-10, в которых в каждом случае устройство 1 для гибки оконных стекол 5 из Фигуры 1 показано в различные следующие друг за другом моменты времени в ходе процесса гибки, чтобы описать примерный способ гибки оконных стекол 5. Для большей наглядности только избранные компоненты устройства 1 еще снабжены кодовыми номерами позиций. Кроме того, устройство 1 показано без подающего модуля 38.
В Фигуре 4 представлена ситуация во время процесса гибки, в которой стекло 5 было доставлено в приемное положение 22 первой гибочной секции 9. Первая гибочная матрица 12 находится в приподнятом положении над стеклом 5. Вторая гибочная матрица 12’ находится примерно на такой же высоте, как и первая гибочная матрица 12. Под второй гибочной матрицей 12’ находится нажимная рама 25 во втором положении 24 нажимной рамы второй гибочной секции 9’ с уложенным на нее дополнительным стеклом 5. Закалочная рама 30 находится во втором положении 32 закалочной рамы закалочной зоны 4 между обоими закалочными боксами 29.
Фигура 5 показывает устройство 1 для гибки оконных стекол 5 в более поздний момент времени, чем в Фиг. 1. Первая гибочная матрица 12 сдвинута вниз по направлению к стеклу 5 от более высокого положения в первое опущенное положение. Стекло 5 в результате вдувания создаваемого дутьевым устройством 21 воздушного потока 33 из дутьевого устройства (символически изображенного стрелками) на нижнюю сторону по вертикальному направлению было приподнято от приемного положения 22 по направлению к первой гибочной матрице 12, и действием воздушного потока 33 из дутьевого устройства прижато к контактной поверхности 14 первого гибочного инструмента 11. В первом опущенном положении первой гибочной матрицы 12 контактная поверхность 14 опускается настолько, что стекло 5 может быть прижато к контактной поверхности 14 воздушным потоком 33 из дутьевого устройства. Кроме того, фиксирование стекла 5 на контактной поверхности 14 производится присасыванием посредством всасывающего устройства 20. Создаваемое воздушным потоком 34 от всасывающего устройства разрежение на контактной поверхности 14 также символически изображено стрелками. Вследствие обычно неполного прилегания к контактной поверхности 14 достигается только предварительная гибка стекла 5 в краевой области 17. Как правило, прижимающее давление, обусловленное воздушным потоком 33 из дутьевого устройства, не является достаточным, чтобы обеспечить кромочную конечную гибку в краевой области 17 стекла 5. С другой стороны, присасывающее действие всасывающего устройства 20 служит по существу только для фиксирования стекла 5 на контактной поверхности 14, пока нажимная рама 25 сдвигается под стеклом 5, и оказывает лишь незначительное влияние на изгибание стекла 5. Тем не менее, благодаря этому могут быть удалены пузырьки в стекле 5. Во внутренней области 18 стекла 5 посредством контактной поверхности 14 и без того возможна только поверхностная предварительная гибка. В Фигуре 2 показана ситуация, в которой стекло 5 уже зафиксировано на контактной поверхности 14.
Вторая гибочная матрица 12’ была приведена от поднятого положения в опущенное положение, в котором возникает поверхностный контакт между контактной поверхностью 14’ и уложенным на нажимную раму 25 стеклом 5. При этом стекло 5 в краевой области 17 сжимается между наружным поверхностным участком 15’ контактной поверхности 14’ гибочного инструмента 11’ и поверхностью 28 прессования нажимной рамы 25 (смотри Фигуры 8А и 8В). Поверхность 28 прессования имеет форму, комплементарную наружному поверхностному участку 15’ контактной поверхности 14. Краевая область 17 стекла 5 в результате этого предпочтительно изгибается до конечного состояния, то есть, достигает своей кромочной конечной гибки. Однако также возможно, что краевая область 17 стекла 5 подвергается только предварительной гибке. Затем производится фиксирование стекла 5 на контактной поверхности 14’ присасыванием посредством всасывающего устройства 20’. Допустимо, что контактная поверхность 14’ альтернативно находится на небольшом расстоянии от стекла 5, когда присасывание стекла 5 возможно через известное расстояние. Создающий разрежение на контактной поверхности 14’ воздушный поток 34’ всасывающего устройства символически изображен стрелками. В отличие от первой гибочной матрицы 12, где предусматривается только фиксирование стекла 5, и тем самым разрежение не вызывает (по меньшей мере заметное) изгибание стекла 5, присасывание стекла 5 к контактной поверхности 14’ также служит для гибки стекла 5, то есть, вследствие присасывания создается достаточное механическое давление, чтобы изгибать стекло 5 желательным образом. Таким образом, стекло 5 на второй контактной поверхности 14’ подвергается поверхностной предварительной гибке во внутренней области 18 стекла 5. Кроме того, на стекле может поддерживаться созданная до этого кромочная конечная гибка в краевой области 17. Кроме того, закалочная рама 30 находится в закалочном устройстве 4 между обоими закалочными боксами 29.
Фигура 6 показывает устройство 1 для гибки оконных стекол 5 в более поздний момент времени, чем в Фиг. 5. Первая гибочная матрица 12 опять выведена в свое поднятое положение вверх, причем стекло 5 зафиксировано на контактной поверхности 14 воздушным потоком 34 всасывающего устройства. Вторая гибочная матрица 12’ также выведена в свое поднятое положение вверх, причем стекло 5 зафиксировано на контактной поверхности 14’ воздушным потоком 34’ всасывающего устройства. Нажимная рама 25 не содержит стекло и находится под второй гибочной матрицей 12’. Кроме того, закалочная рама 30 находится в закалочном устройстве 4 между обоими закалочными боксами 29.
Фигура 7 показывает устройство 1 для гибки оконных стекол 5 в более поздний момент времени, чем в Фиг. 6. Первая гибочная матрица 12 показана в ситуации, в которой она находится в движении на пути ко второму опущенному положению выше первого опущенного положения вниз. Стекло 5 все еще зафиксировано на контактной поверхности 14 воздушным потоком 34 всасывающего устройства. Нажимная рама 25 посредством устройства 26 для перемещения каретки поступательно передвигается на каретке 27 в горизонтальном направлении (отрицательном х-направлении) от второго положения 24 нажимной рамы к первому положению 23 нажимной рамы, и находится под первой гибочной матрицей 12. Кроме того, вторая гибочная матрица 12’ находится в своем поднятом положении, причем стекло зафиксировано на контактной поверхности 14’ воздушным потоком 34’ всасывающего устройства. Закалочная рама 30 перемещается от положения 32 закалки во второе положение 24 нажимной рамы второй гибочной секции 9’ и находится под второй гибочной матрицей 12’.
Фигура 8 показывает устройство 1 для гибки оконных стекол 5 в более поздний момент времени, чем в Фиг. 7. Первая гибочная матрица 12 теперь была смещена во второе опущенное положение, причем стекло 5 находится в контакте с нажимной рамой 25. При этом стекло 5 в краевой области 17 сдавливается между наружным поверхностным участком 15 контактной поверхности 14 гибочного инструмента 11 и поверхностью 28 прессования нажимной рамы 25 (смотри Фигуры 11А и 11В). Поверхность 28 прессования имеет форму, комплементарную наружному поверхностному участку 15 контактной поверхности 14. В результате этого краевая область 17 стекла 5 подвергается предварительной гибке или гибке до готового состояния. Большим преимуществом прижатия стекла 5 к нажимной раме 25 является обусловленное этим очень точное определение положения стекла 5 на нажимной раме 25 с точным размещением краевой области 17 стекла 5 на поверхности 28 прессования нажимной рамы 25. Это обеспечивает возможность фиксирования стекла 5 в точном положении на нажимной раме 25 посредством прилегающего к стеклу 5 стопора, который более подробно не представлен. Тем самым может достигаться особенно высокая точность изготовления и хорошее оптическое качество изогнутого стекла. Вторая гибочная матрица 12’ перемещается в свое опущенное положение, причем стекло 5 уложено на закалочную раму 30.
Фигура 9 показывает устройство 1 для гибки оконных стекол 5 в более поздний момент времени, чем в Фиг. 8. Первая гибочная матрица 12 и вторая гибочная матрица 12’ в каждом случае опять были выведены в свои поднятые положения. Нажимная рама 25 поступательно передвигается в горизонтальной плоскости (положительное х-направление) от первого положения 23 нажимной рамы ко второму положению 24 нажимной рамы, и находится под второй гибочной матрицей 12’. В частности, во время транспортирования находящееся на нажимной раме 25 стекло 5 подвергается предварительной гибке во внутренней области 18 под действием силы тяжести. В результате зажимания в краевой области 17 поверхностная предварительная гибка под действием силы тяжести во внутренней области 18 ограничивается. Закалочная рама 30 с уложенным на нее стеклом 5 передвинулась от второго положения 24 нажимной рамы второй гибочной секции 9’ в положение 32 закалки, и находится между обоими закалочными боксами 29. Чтобы обеспечить возможность выхода из гибочной зоны 2, на короткий период времени была открыта дверца 35. Благодаря этому может быть предотвращено заметное снижение температуры в гибочной зоне 2. Во время транспортирования на закалочной раме 30 может быть под действием силы тяжести выполнена кромочная конечная гибка и поверхностная конечная гибка стекла 5. Для этой цели закалочная рама 30 имеет ориентированную вверх поверхность 55 рамы для контакта со стеклом 5, которая сформирована пригодной для кромочной конечной гибки. Кроме того, закалочная рама 30 сформирована пригодной для поверхностной конечной гибки под действием гравитации.
Фигура 10 показывает устройство 1 для гибки оконных стекол 5 в более поздний момент времени, чем в Фиг. 9. Первая гибочная матрица 12 и вторая гибочная матрица 12’ опять же находятся в поднятом положении. В приемное положение 22 первой гибочной секции 9 было введено новое стекло 5. Находящееся на нажимной раме 25 стекло 5 может быть прижато второй гибочной матрицей 12’ и присосано. Находящееся в закалочной зоне 4 стекло 5 охлаждается для закалки потоком воздуха, который наглядно показан стрелками. Ситуация в Фигуре 10 тем самым равнозначна ситуации в Фигуре 1. Тем самым процесс гибки может продолжаться непрерывно.
В Фигурах 11А и 11В показано прессование стекла 5 между нажимной рамой 25 и контактной поверхностью 14 первого гибочного инструмента 11. Можно видеть, что контактная поверхность 14 имеет наружный поверхностный участок 15 и внутренний поверхностный участок 16 с различными контурами поверхности. Наружный поверхностный участок 15 имеет контур поверхности, который соответствует желательной кромочной конечной гибке в краевой области 17 стекла 5, и, соответственно, обеспечивает ее возможность. Внутренний поверхностный участок 16 имеет контур поверхности, который соответствует желательной поверхностной предварительной гибке во внутренней поверхности стекла 5, и, соответственно, обеспечивает ее возможность. Поверхность 28 прессования нажимной рамы 25 имеет контур поверхности, который является комплементарным контуру поверхности наружного поверхностного участка 15 контактной поверхности 14. Фигура 11А показывает ситуацию, в которой внутренняя область 18 стекла 5 достигает состояния примыкания к внутреннему поверхностному участку 16 (первый контакт). Это уже может пониматься как прессование. В Фигуре 11В стекло 5 также в краевой области 17 доводится до полного прилегания к наружному поверхностному участку 15 контактной поверхности 14, причем была достигнута желательная кромочная конечная гибка в краевой области 17.
В Фигуре 12 посредством технологической блок-схемы разъясняются последовательные стадии способа получения стекла 5 посредством устройства 1. При этом в первой стадии I нагретое до температуры гибки стекло 5 поступает в приемное положение 22. Во второй стадии II стекло 5 фиксируется на контактной поверхности 14 первой гибочной матрицы 12. В третьей стадии III нажимная рама 25 для стекла 5 позиционируется в первом положении 23 нажимной рамы. В четвертой стадии IV стекло 5 укладывается на нажимную раму 25. В пятой стадии V стекло 5 транспортируется на нажимной раме 25 ко второму положению 24 нажимной рамы. В шестой стадии VI стекло 5 фиксируется на контактной поверхности 14’ второй гибочной матрицы 12’.
В примерном варианте выполнения соответствующего изобретению способа прессованием стекла 5 между первой гибочной матрицей 12 и нажимной рамой 25 производится кромочная предварительная гибка в краевой области стекла 5, и прессованием стекла 5 между второй гибочной матрицей 12’ и нажимной рамой 25 выполняется кромочная предварительная гибка в краевой области 17 стекла 5, причем кромочная конечная гибка проводится во время транспортирования на закалочной раме 30. Во время транспортирования на нажимной раме 25 производится поверхностная предварительная гибка во внутренней области стекла 5 под действием силы тяжести. Во время транспортирования на закалочной раме 25 выполняется поверхностная конечная гибка во внутренней области стекла 5 под действием силы тяжести. Тем самым стекло приобретает свою конечную форму только на закалочной раме.
В дополнительном примерном варианте выполнения соответствующего изобретению способа прессованием стекла 5 между первой гибочной матрицей 12 и нажимной рамой 25 производится кромочная предварительная гибка в краевой области 17 стекла 5, и прессованием стекла 5 между второй гибочной матрицей 12’ и нажимной рамой 25 выполняется кромочная конечная гибка в краевой области 17 стекла 5. Во время транспортирования на закалочной раме 30 производится дополнительная кромочная конечная гибка только в том смысле, что уже имеющаяся кромочная конечная гибка не утрачивается, то есть, кромочная конечная гибка сохраняется неизменной. Во время транспортирования на нажимной раме 25 выполняется поверхностная предварительная гибка во внутренней области стекла 5 под действием силы тяжести. Во время транспортирования на закалочной раме 30 производится поверхностная конечная гибка во внутренней области стекла 5 под действием силы тяжести. Тем самым стекло 5 приобретает свою конечную форму в краевой области 17 уже посредством второй гибочной матрицы 12’. Во внутренней области стекло 5 получает свою окончательную форму лишь на закалочной раме 30.
В дополнительном примерном варианте выполнения соответствующего изобретению способа прессованием стекла 5 между первой гибочной матрицей 12 и нажимной рамой 25 производится кромочная конечная гибка в краевой области 17 стекла 5. Во время транспортирования на нажимной раме 25 и закалочной раме 30 производится дополнительная кромочная конечная гибка только в том смысле, что уже имеющаяся кромочная конечная гибка не утрачивается, то есть, кромочная конечная гибка сохраняется неизменной. Во время транспортирования на нажимной раме 25 выполняется поверхностная предварительная гибка во внутренней области стекла 5 под действием силы тяжести. Во время транспортирования на закалочной раме 30 производится поверхностная конечная гибка во внутренней области стекла 5 под действием силы тяжести. Тем самым стекло 5 приобретает свою конечную форму в краевой области 17 уже на первой гибочной матрице 12. Во внутренней области стекло 5 получает свою окончательную форму лишь на закалочной раме 30.
Во всех вариантах выполнения способа кромочная предварительная гибка и/или поверхностная предварительная гибка может выполняться фиксированием стекла 5 на первой гибочной матрице 12 и, соответственно, второй гибочной матрице 12’. Кроме того, фиксированием стекла 5 на второй гибочной матрице 12’ может проводиться поверхностная конечная гибка.
Из вышеуказанных вариантов выполнения следует, что изобретением разработан способ, а также компактное устройство для получения оконных стекол, посредством которых обеспечивается возможность простого и экономичного изготовления стекол с короткими периодами циклов. В частности, благодаря этому может быть повышена производительность в случае сложных конфигураций стекол. В особенности предпочтительно может использоваться время транспортирования на нажимной раме между обеими гибочными матрицами для гибки под действием силы тяжести во внутренней области поверхности. С использованием подающего модуля с кареткой и размещенной на ней нажимной рамой нажимная рама может быть позиционирована с особенно высокой точностью. Точность позиционирования стекла на нажимной раме может быть еще больше улучшена сдавливанием стекла между первой гибочной матрицей и нажимной рамой в краевой области стекла, причем стекло в краевой области подвергается предварительной или конечной гибке. Благодаря этому могут быть получены стекла, удовлетворяющие особенно высоким требованиям в отношении качества. Кроме того, с помощью подающего модуля и транспортируемых на каретке инструментов может простым и экономичным путем проводиться замена и/или техническое обслуживание инструментов обеих гибочных матриц. Особенно благоприятным образом инструменты могут быть нагреты для оснастки гибочных матриц так, что может непрерывно продолжаться обработка стекол после смены инструментов. Тем самым изобретение позволяет особенно экономично изготавливать стекла при относительно коротких продолжительностях циклов и с особенно высокими требованиями к качеству.
Список ссылочных позиций
1 устройство
2 гибочная камера
3 зона предварительного нагревания
4 закалочная зона
5 оконное стекло
6 устройство для транспортирования стекол
7 рольганг
8 ролик
9,9’ гибочная секция
10,10’ подвеска
11,11’ гибочный инструмент
12,12’ гибочная матрица
13,13’ устройство для перемещения подвески
14,14’ контактная поверхность
15,15’ наружный поверхностный участок
16,16’ внутренний поверхностный участок
17 краевая область
18 внутренняя область
19 кромка стекла
20,20’ всасывающее устройство
21 дутьевое устройство
22 приемное положение
23 первое положение нажимной рамы/инструмента
24 второе положение нажимной рамы/инструмента, первое положение закалочной рамы
25 нажимная рама
26 устройство для перемещения каретки
27 каретка
28 поверхность прессования
29 закалочный бокс
30 закалочная рама
31 устройство для перемещения закалочной рамы
32 второе положение закалочной рамы
33 воздушный поток из дутьевого устройства
34,34’ воздушный поток всасывающего устройства
35 вторая дверца гибочной камеры
36 стенка гибочной камеры
37 полость гибочной камеры
38 подающая камера
39 стенка подающей камеры
40 полость подающей камеры
41 нагревательное устройство подающей камеры
42 устройство для перемещения подающей камеры
43 отверстие подающей камеры
44 дверца подающей камеры
45 первое отверстие гибочной камеры
46 первая дверца гибочной камеры
47 платформа на воздушной подушке
48 салазки
49 направляющая салазок
50 приводное устройство
51,51’ опорное устройство
52 несущий кронштейн
53,53’ инструментальная подставка
54 второе отверстие гибочной камеры
55 поверхность рамы
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ И УСТРОЙСТВО ДЛЯ ГИБКИ ОКОННЫХ СТЕКОЛ | 2018 |
|
RU2731248C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ИЗГИБАНИЯ ПЛАСТИН | 2019 |
|
RU2760812C1 |
| ФОРМА ДЛЯ ГРАВИТАЦИОННОЙ ГИБКИ С ИЗОГНУТОЙ ОПОРНОЙ ПОВЕРХНОСТЬЮ ДЛЯ ГИБКИ СТЕКЛЯННЫХ ЛИСТОВ | 2018 |
|
RU2721783C1 |
| ГИБКА СТЕКЛЯННЫХ ЛИСТОВ | 2017 |
|
RU2742780C2 |
| ГИБКА ТОНКОГО СТЕКЛА | 2017 |
|
RU2753297C2 |
| ПРИСАСЫВАЮЩАЯ ОПОРА ДЛЯ СТЕКЛА | 2017 |
|
RU2742025C2 |
| Способ и устройство для гибки тонколистового металла | 2017 |
|
RU2638465C1 |
| Установка для гнутья и закалки листового стекла | 1987 |
|
SU1479425A1 |
| СПОСОБ МОЛЛИРОВАНИЯ СТЕКЛА ПРИ ИЗБЫТОЧНОМ ДАВЛЕНИИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2016 |
|
RU2689097C1 |
| ОКОННЫЙ БЛОК | 2006 |
|
RU2413828C2 |
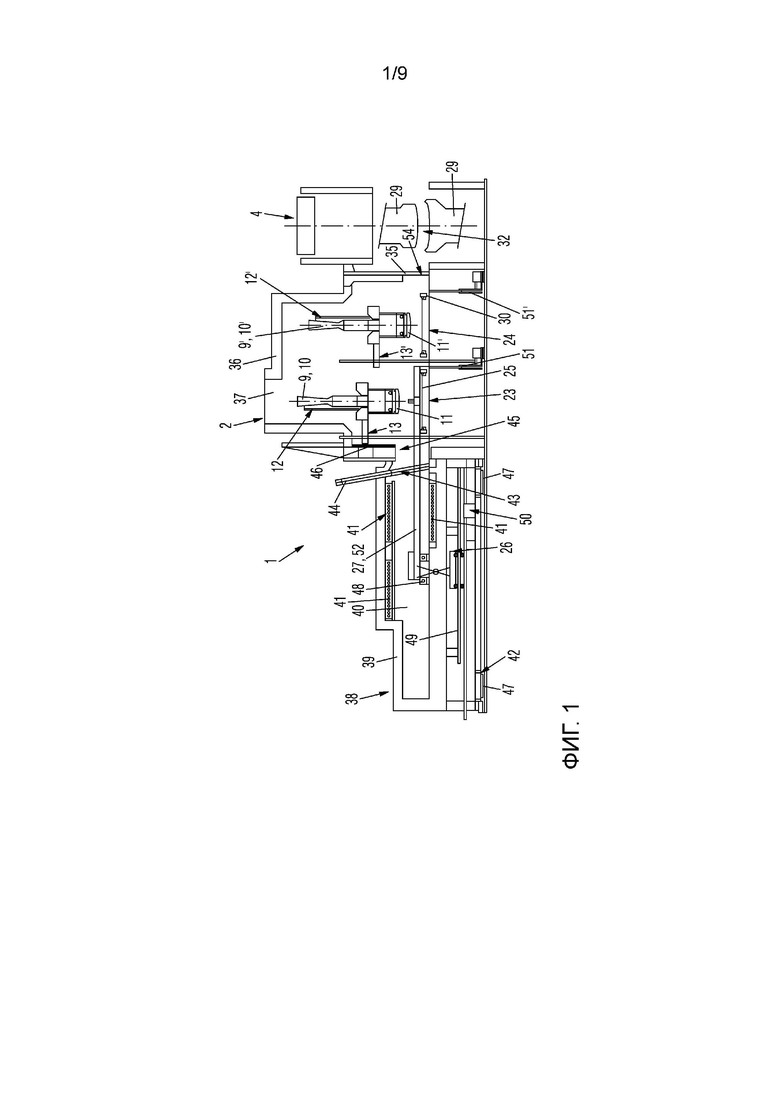
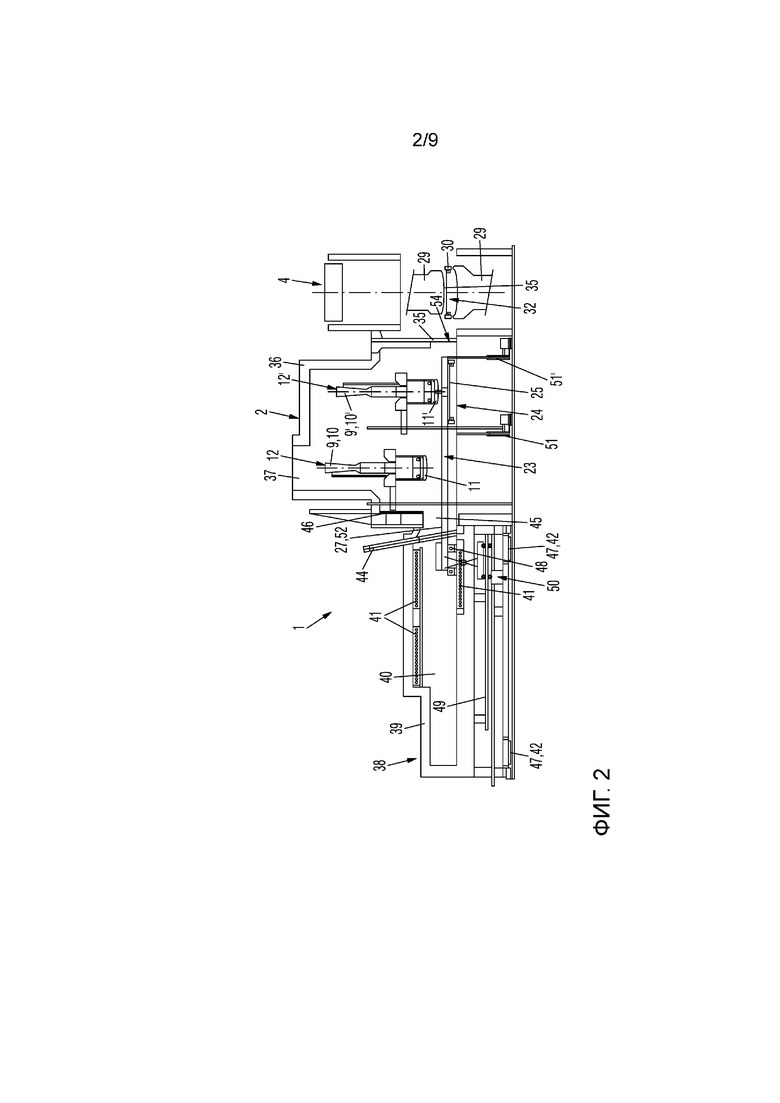
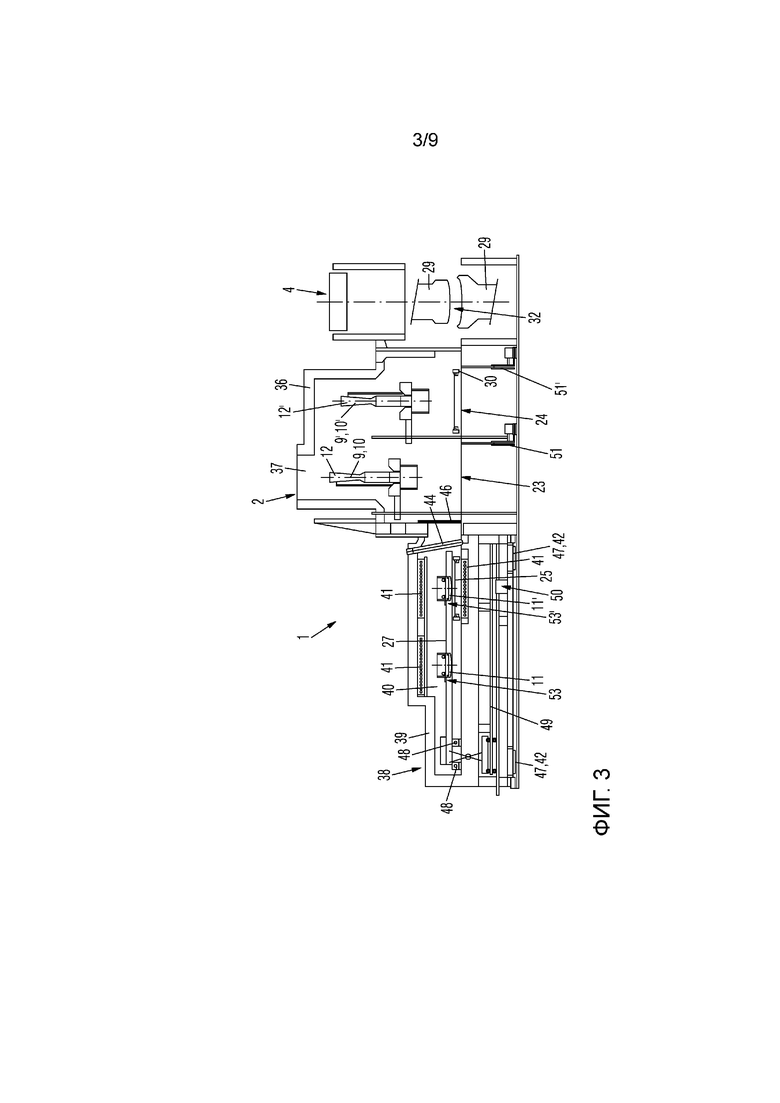
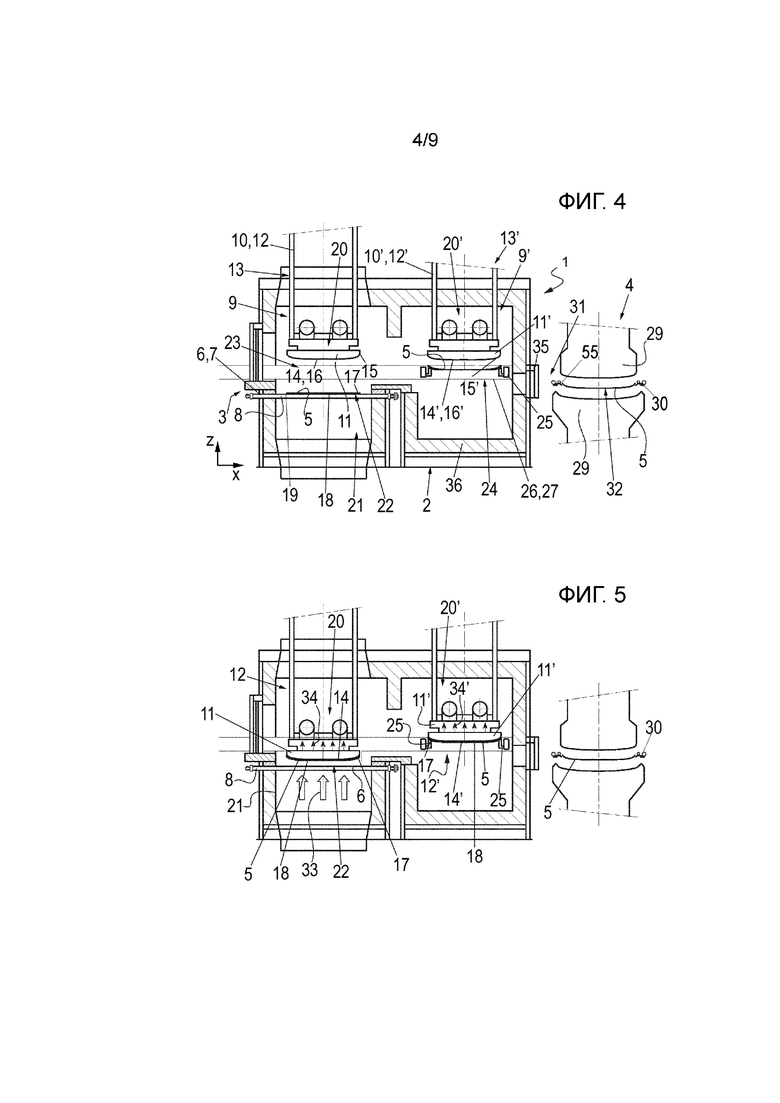
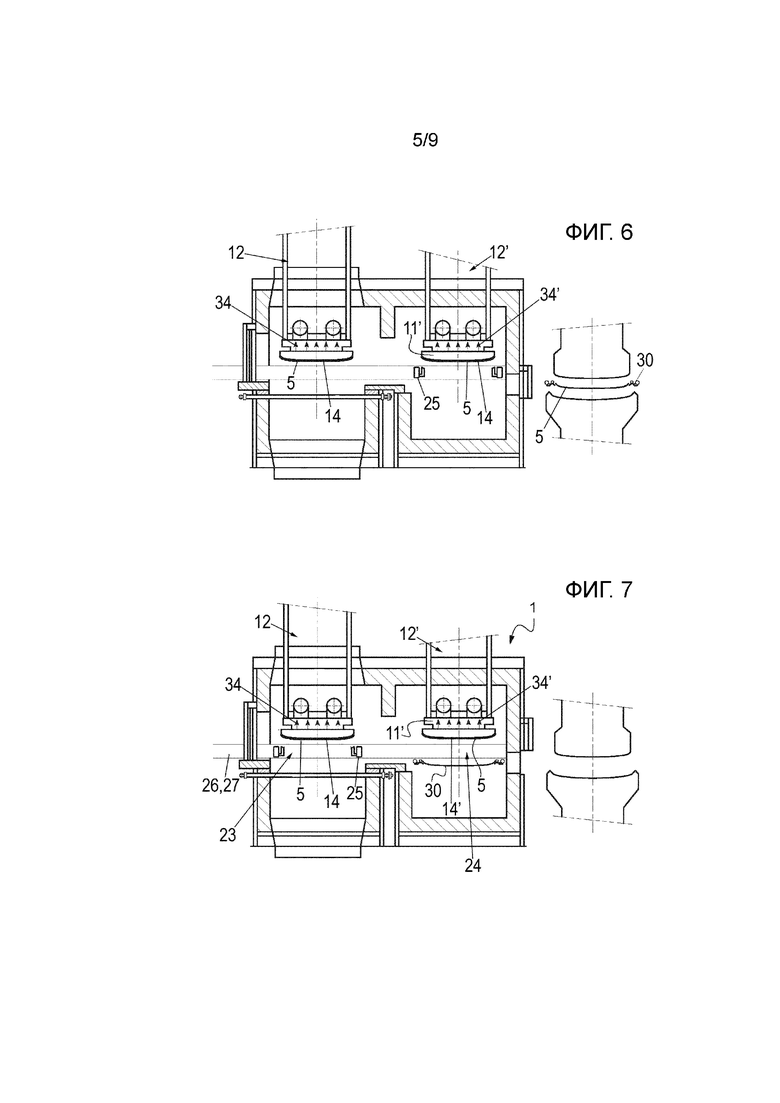
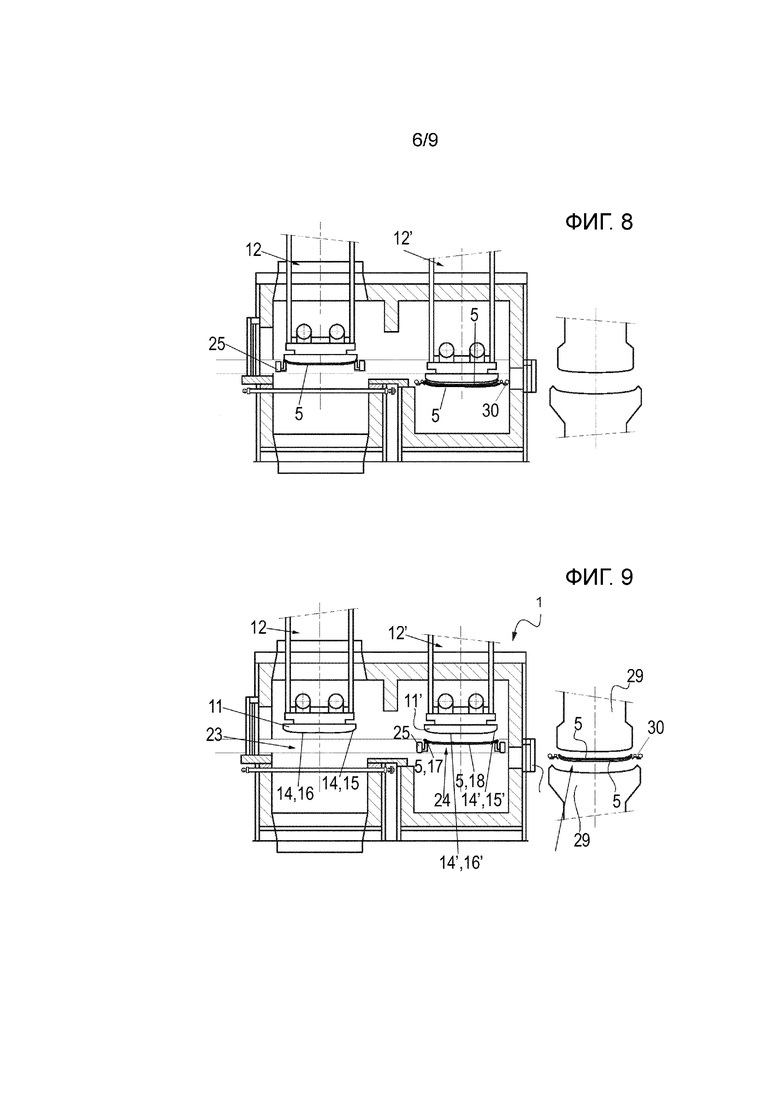
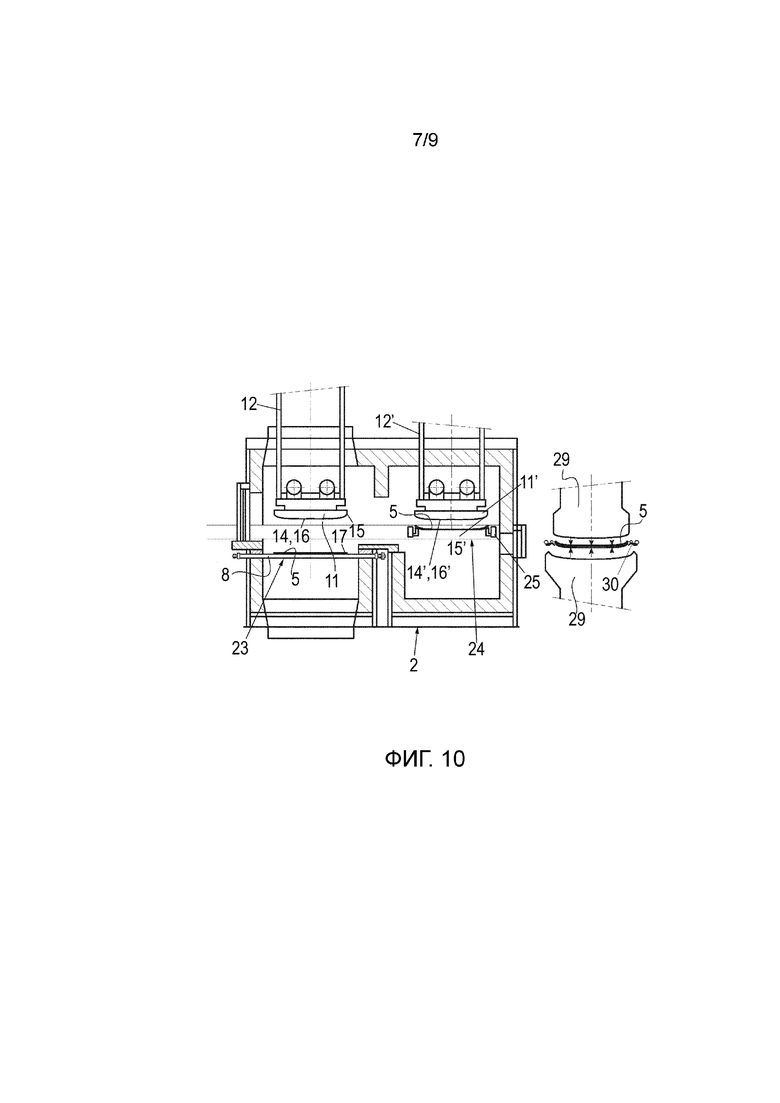
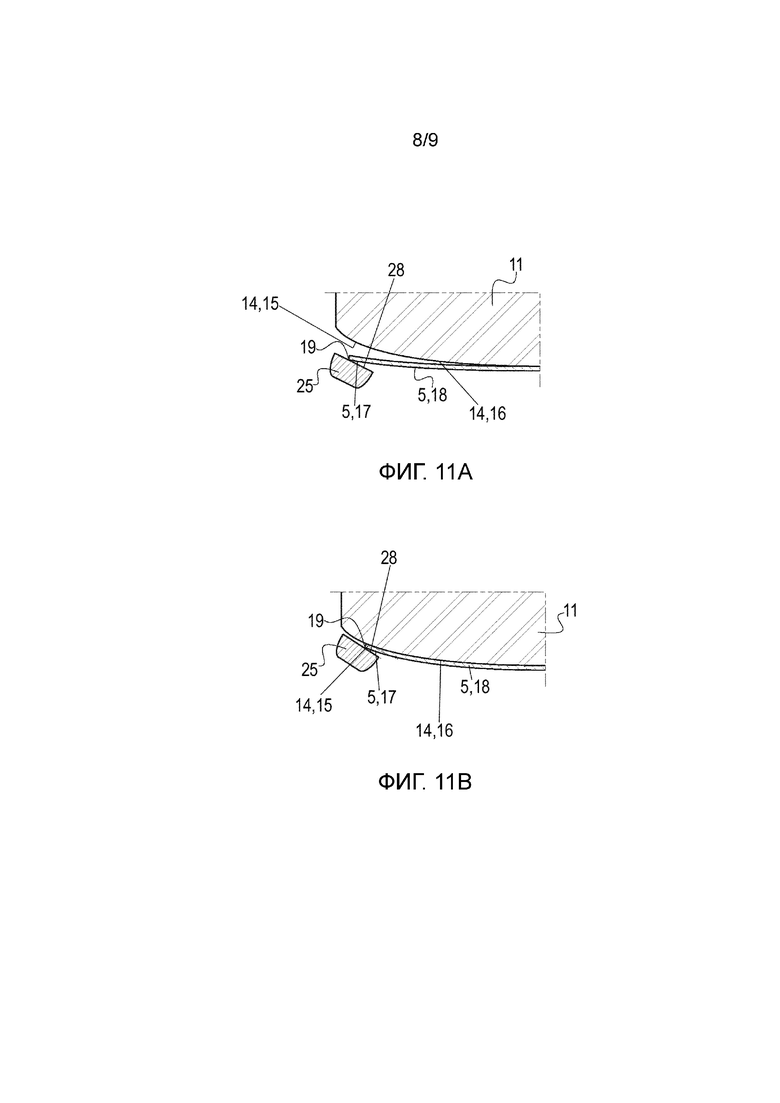
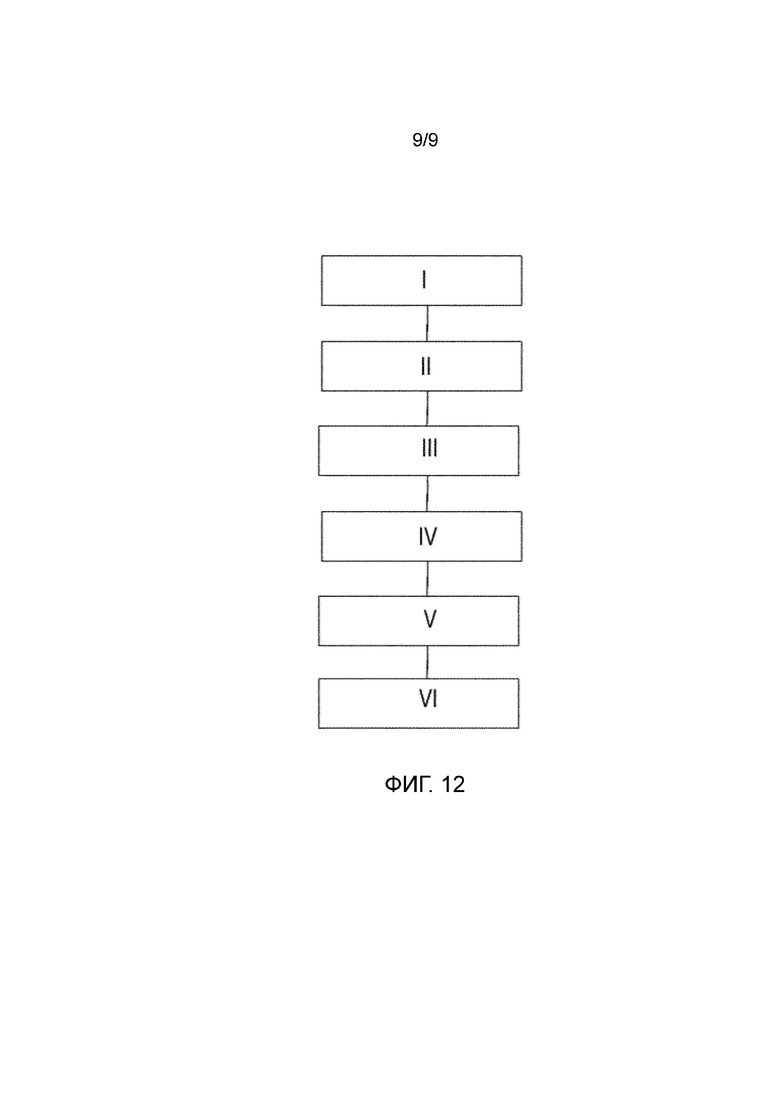
Группа изобретений относится к способу и устройству для гибки оконных стекол в гибочной зоне. Технический результат заключается в сокращении продолжительности цикла изготовления, повышении точности позиционирования нажимной рамы. Способ гибки оконных стекол в гибочной зоне, которая имеет первую гибочную матрицу и вторую гибочную матрицу, включает стадии: предоставления нагретого до температуры гибки стекла, фиксирования стекла на контактной поверхности первой гибочной матрицы, позиционирования нажимной рамы для стекла в соответствующем первой гибочной матрице первом положении нажимной рамы, транспортирования стекла на нажимной раме в соответствующее второй гибочной матрице второе положение нажимной рамы, фиксирования стекла на контактной поверхности второй гибочной матрицы. Стекло фиксируют на контактной поверхности первой гибочной матрицы и на контактной поверхности второй гибочной матрицы посредством нагнетания на стекло газообразной текучей среды, в результате чего стекло приподнимается и прижимается к контактной поверхности гибочной матрицы, и/или присасывания стекла к контактной поверхности. Нажимная рама закреплена на вводимой подающим модулем в гибочную зону каретке. Нажимную раму в результате перемещения каретки перемещают между первым положением нажимной рамы и вторым положением нажимной рамы в боковом направлении относительно первой и второй гибочных матриц. Подающий модуль выполнен с возможностью перемещения, и его подводят к гибочной зоне. 2 н. и 10 з.п. ф-лы, 12 ил.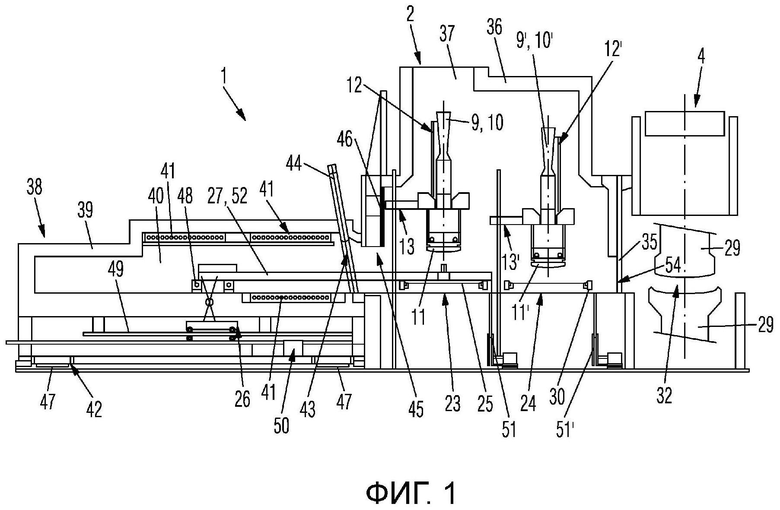
1. Способ гибки оконных стекол (5) в гибочной зоне (2), которая имеет первую гибочную матрицу (12) и вторую гибочную матрицу (12’), со следующими стадиями:
- предоставления нагретого до температуры гибки стекла (5),
- фиксирования стекла (5) на контактной поверхности (14) первой гибочной матрицы (12),
- позиционирования нажимной рамы (25) для стекла (5) в соответствующем первой гибочной матрице (12) первом положении (23) нажимной рамы,
- транспортирования стекла (5) на нажимной раме (25) в соответствующее второй гибочной матрице (12’) второе положение (24) нажимной рамы,
- фиксирования стекла (5) на контактной поверхности (14’) второй гибочной матрицы (12’),
причем стекло (5) фиксируют на контактной поверхности (14) первой гибочной матрицы (12) и на контактной поверхности (14’) второй гибочной матрицы (12’) посредством
- нагнетания на стекло (5) газообразной текучей среды, в результате чего стекло (5) приподнимается и прижимается к контактной поверхности (14, 14’) гибочной матрицы (12, 12’), и/или
- присасывания стекла (5) к контактной поверхности (14, 14’),
причем нажимная рама (25) закреплена на вводимой подающим модулем (38) в гибочную зону (2) каретке (27), причем нажимную раму (25) в результате перемещения каретки (27) перемещают между первым положением (23) нажимной рамы и вторым положением (24) нажимной рамы в боковом направлении относительно первой и второй гибочных матриц (12, 12’),
причем подающий модуль (38) выполнен с возможностью перемещения и его подводят к гибочной зоне (2).
2. Способ по п. 1, в котором по меньшей мере один соединяемый с первой гибочной матрицей (12) и/или второй гибочной матрицей (12’) инструмент (11, 11’) транспортируют на каретке (27) между подающим модулем (38) и гибочной зоной (2).
3. Способ по п. 2, в котором по меньшей мере один инструмент (11, 11’) нагревают в подающем модуле (38).
4. Способ по одному из пп. 1-3, в котором каретку (27) подпирают снизу в первом положении (23) нажимной рамы и/или во втором положении (24) нажимной рамы.
5. Способ по одному из пп. 1-4, в котором, в то время как стекло (5) зафиксировано на контактной поверхности (14’) второй гибочной матрицы (12’), закалочную раму (30) перемещают для укладки стекла (5) к соответствующему второй гибочной матрице первому положению (23) закалочной рамы, стекло (5) укладывают на закалочную раму (30) и несущую стекло (5) закалочную раму (30) перемещают в сторону относительно второй гибочной матрицы (12, 12’) ко второму положению (32) закалочной рамы для закалки стекла (5).
6. Устройство (1) для гибки оконных стекол (5), в частности для выполнения способа по одному из пп. 1-5, включающее:
- гибочную зону (2) с первой гибочной матрицей (12) и второй гибочной матрицей (12’),
- подающий модуль (38), который выполнен с возможностью перемещения относительно гибочной зоны (2), причем подающий модуль (38) подводится к гибочной зоне (2) так, что каретка (27) с нажимной рамой (25) для стекла (5) имеет возможность вводиться в гибочную зону (2), причем нажимная рама (25) в результате перемещения каретки (27) имеет возможность перемещения в боковом направлении относительно первой и второй гибочных матриц (12, 12’) между соответствующим первой гибочной матрице (12) первым положением (23) нажимной рамы и соответствующим второй гибочной матрице (12’) вторым положением (24) нажимной рамы.
7. Устройство (1) по п. 6, в котором гибочная зона (2) выполнена как гибочная камера с полостью (37) гибочной камеры, причем первая гибочная матрица (12) и вторая гибочная матрица (12’) размещены в полости (37) гибочной камеры и причем подающий модуль (38) выполнен как подающая камера с полостью (40) подающей камеры, причем каретка (27) с нажимной рамой (25) выполнена с возможностью полностью размещаться в полости (40) подающей камеры.
8. Устройство (1) по п. 7, в котором полость (40) подающей камеры является нагреваемой.
9. Устройство (1) по п. 8, в котором устройство (26) для перемещения каретки для передвижения каретки (27) по меньшей мере частично размещено снаружи нагреваемой полости (40) подающей камеры.
10. Устройство (1) по одному из пп. 6-9, в котором по меньшей мере один соединяемый с первой и/или второй гибочной матрицей (12, 12’) инструмент (11, 11’) выполнен с возможностью транспортирования на каретке (27), причем инструмент (11, 11’) в результате перемещения каретки (27) имеет возможность перемещаться в боковом направлении относительно первой и второй гибочных матриц (12, 12’) между гибочной зоной (3) и соответствующим первой гибочной матрице (12) первым положением (23) инструмента и/или соответствующим второй гибочной матрице (12’) вторым положением (24) инструмента.
11. Устройство (1) по одному из пп. 6-9, в котором по меньшей мере одно опорное устройство (51, 51’) для поддерживания нажимной рамы (25) и/или каретки (27) размещается в первом положении (23) нажимной рамы и/или во втором положении (24) нажимной рамы.
12. Устройство (1) по одному из пп. 6-11, которое имеет зону (3) предварительного нагревания с нагревательным устройством для нагревания стекол (5) до температуры гибки, а также транспортирующее устройство (6), в частности типа рольганга (7), для транспортирования стекол (5) от зоны (3) предварительного нагревания к гибочной зоне (2), и/или
которое имеет закалочную зону (4) с охлаждающим устройством (29) для термической закалки стекла (5), причем закалочная рама (30) для транспортирования стекла (5) выполнена с возможностью перемещения в боковом направлении относительно второй гибочной матрицы (12, 12’) от соответствующего второй гибочной матрице первого положения (24) закалочной рамы ко второму положению (32) закалочной рамы в закалочной зоне (4).
| Восстанавливающий орган для многоканальной резервированной системы | 1987 |
|
SU1550639A1 |
| Колосоуборка | 1923 |
|
SU2009A1 |
| СПОСОБ ОЦЕНКИ ПРОЦЕССОВ РАЗРУШЕНИЯ КОНСТРУКЦИЙ ПРИ АКУСТИКО-ЭМИССИОННОМ КОНТРОЛЕ | 2003 |
|
RU2233444C1 |
| JPH 04240128 A, 27.08.1992 | |||
| УСТАНОВКА ДЛЯ ГНУТЬЯ И ЗАКАЛКИ СТЕКЛА('х/ ; hA | 0 |
|
SU169213A1 |

