Изобретение относится к медицинской технике, а именно к протезам верхних конечностей.
Известен многофункциональный активный протез руки по патенту РФ №2026654, МПК A61F 2/56, содержащий наплечник, исполнительный орган, выполненный в виде трехзвенной шарнирно-рычажной цепи с тремя датчиками углов, датчики независимого управления и системы независимого управления исполнительным механизмом ротации искусственной кисти и исполнительным механизмом искусственной кисти, три системы управления связным движением исполнительных механизмов сгибания плеча, сгибания предплечья и сгибания искусственной кисти, каждая из которых содержит сумматор, два функциональных преобразователя, усилитель мощности и привод, задающий орган, выполненный в виде плоского трехзвенного кинематического аналога исполнительной цепи, содержащий три датчика управления связным движением.
Недостатком устройства является то, что оно не компенсирует погрешность положения исполнительного органа при резком внешнем воздействии на корпус инвалида, включая и воздействие исполнительного устройства, реактивный момент которого при пуске инвалид воспринимает как внешнее воздействие. Возникающая позиционная погрешность снижает точность, увеличивает время выполнения целенаправленного действия, создает неудобство для оператора-инвалида.
Задачей предлагаемого изобретения является создание многофункционального активного протеза руки после вычленения плеча, повышающего удобство инвалида за счет повышения точности движений и сокращения времени их выполнения путем компенсации перемещений, возникающих при внешнем воздействии на корпус инвалида.
Технический результат поставленной задачи достигается тем, что многофункциональный активный протез руки, содержащий наплечник, исполнительный орган, выполненный в виде трехзвенной шарнирно-рычажной цепи с тремя датчиками углов, датчики независимого управления и системы независимого управления исполнительным механизмом ротации искусственной кисти и исполнительным механизмом искусственной кисти, три системы управления связным движением исполнительных механизмов сгибания-разгибания плеча, предплечья и искусственной кисти, каждая из которых содержит сумматор, два функциональных преобразователя, усилитель мощности и привод, задающий орган, выполненный в виде плоского трехзвенного кинематического аналога исполнительной цепи, содержащий три датчика управления связным движением, предлагается снабдить жестким креплением исполнительного органа и закрепленным на нем блоком коррекции положения звена плеча, содержащим последовательно соединенные акселерометр, блок двойного интегрирования и определитель угла коррекции, при этом определитель угла коррекции должен быть соединен с сумматором системы управления связным движением сгибания плеча, а жесткое крепление исполнительного органа зафиксировано на корпусе инвалида и выполнено с возможностью свободного перемещения надплечья с наплечником.
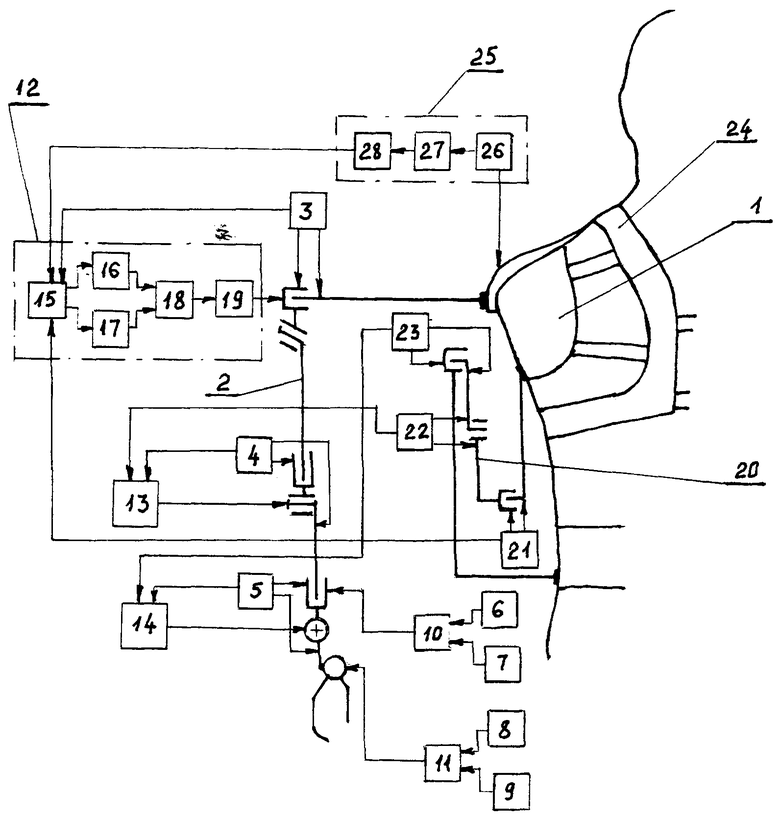
Сущность изобретения поясняется чертежом, где представлена структурная схема многофункционального активного протеза руки, обеспечивающего компенсацию погрешности, возникающей при внешнем воздействии на корпус инвалида.
Многофункциональный активный протез руки содержит наплечник 1, исполнительный орган 2, выполненный в виде трехзвенной шарнирно-рычажной цепи с тремя датчиками углов 3, 4, 5, датчики независимого управления 6, 7, 8, 9 и системы 10, 11 независимого управления исполнительным механизмом ротации искусственной кисти и исполнительным механизмом искусственной кисти, три системы управления 12, 13, 14 связным движением исполнительных механизмов сгибания-разгибания плеча, предплечья и искусственной кисти, каждая из которых содержит сумматор 15, два функциональных преобразователя 16, 17, усилитель мощности 18 и привод 19, задающий орган 20, выполненный в виде плоского трехзвенного кинематического аналога исполнительной цепи, содержащий три датчика 21, 22, 23 управления связным движением. Устройство снабжено жестким креплением 24 исполнительного органа и закрепленным на нем блоком 25 коррекции положения звена плеча, содержащим последовательно соединенные акселерометр 26, блок двойного интегрирования 27 и определитель угла коррекции 28, при этом определитель угла коррекции 28 соединен с сумматором 15 системы управления связным движением сгибания плеча, а жесткое крепление 24 исполнительного органа зафиксировано на корпусе инвалида и выполнено с возможностью свободного перемещения надплечья с наплечником 1.
Устройство имеет каналы связного и независимого управления движением исполнительных механизмов, а также канал коррекции положения звена плеча.
Каналы связного управления определяются следующими цепями составляющих элементов. Датчики углов 3, 4, 5 исполнительного органа 2 и датчики управления связным движением 21, 22, 23 задающего органа 20 соединены соответственно с системами управления связным движением 12, 13, 14, которые соединены с исполнительными механизмами сгибания-разгибания плеча, предплечья и кисти. При этом исполнительный орган 2 закреплен со стороны шарнира сгибания плеча на жестком креплении 24, а задающий орган со стороны шарнира сгибания плеча соединен с наплечником 1, развернут на 180 градусов и соединен концевым звеном с поясом.
Каналы индивидуального независимого управления определяются следующими цепями составляющих элементов. Датчики 6, 7, 8, 9 соединены с системами 10, 11 независимого управления, которые в свою очередь соединены с исполнительными механизмами ротации искусственной кисти и искусственной кисти.
Канал коррекции положения звена плеча определяется следующей цепью составляющих элементов.
Блок коррекции 25 положения звена плеча закреплен на жестком креплении 24 исполнительного органа. Он содержит последовательно соединенные акселерометр 26, блок двойного интегрирования 27 и определитель угла коррекции 28, при этом определитель угла коррекции 28 соединен с сумматором 15 системы управления связным движением сгибания плеча.
Устройство работает следующим образом.
Управление исполнительными механизмами ротации кисти и кисти, входящими в состав исполнительного органа 2, осуществляется посредством систем независимого управления 10, 11 по сигналам от датчиков 6, 7 и 8, 9. Управление связным движением выполняется путем воздействия надплечья с наплечником 1 на задающий орган 20. Движение надплечья может осуществляться в пределах зоны его подвижности и совместно с поясничной подвижностью, что увеличивает масштаб копирования и, следовательно, повышает точность манипулирования. При движении задающего органа происходит одновременное воздействие на датчики 21, 22, 23. Сигналы с датчиков 21, 22, 23 поступают соответственно в системы управления связным движением 12, 13, 14, куда также поступают сигналы соответственно с датчиков обратной связи - датчиков угла 3, 4, 5. Каждая из трех данных систем представляет собой позиционную следящую систему с управлением движением исполнительного механизма по рассогласованию. Так, например, сигнал с датчика 21 управления связным движением сгибания-разгибания плеча поступает на сумматор 15 системы управления 12, и одновременно на сумматор поступает сигнал с датчика угла 3. Сумматор выполняет функцию сравнения величин сигналов, определяя величину рассогласования угловых положений задающей и исполнительной части. Сигнал с сумматора после преобразования посредством функциональных преобразователей 16, 17 поступает на усилитель мощности, который управляет работой привода, соединенного с исполнительным механизмом сгибания-разгибания плеча. Отработка угла заданного сигналом с датчика связного движения 21 завершится, когда величина рассогласования с сигналом датчика 3 обратной связи будет равна нулю. При этом привод остановится.
Активный (приводной) шарнир сгибания плеча воспринимает нагрузку от веса всего исполнительного органа и сил, возникающих в процессе движения звеньев исполнительных устройств. Нагрузка, вызванная действием реактивных моментов, действующая в точке подвеса исполнительного органа, оказывает наибольшее влияние на точность выполнения движений. Исполнительный орган, выполняя маятниковые движения в вертикально-сагиттальной плоскости, оказывает воздействие на точку подвеса благодаря реактивному моменту колеблющейся системы. Сила, действующая в точке подвеса маятника направлена горизонтально и стремится развернуть корпус оператора-инвалида. Наибольшее значение это воздействие имеет при пуске с большим ускорением, то есть при большом рассогласовании задающего сигнала и сигнала обратной связи, а также при наибольшем моменте инерции устройства - вытянутой искусственной руки. Инвалид воспринимает силу, действующую в точке подвеса, как внешнее воздействие. Время реакции инвалида на внешнее воздействие (латентный период), как оператора исполнительного органа, составляет ориентировочно 0,2 секунды. За это время точка подвеса исполнительного органа совершает неконтролируемое движение, которое вызывает погрешность в ориентации искусственной руки. Величина смещения точки подвеса зависит от массы подвижной части корпуса инвалида, массы исполнительного органа, угла его поворота и ускорениий. Зная величину ускорения подвижной части корпуса инвалида в зоне подвеса исполнительного органа, можно определить величину смещения точки подвеса за время латентного периода.
Величина ускорения в предлагаемом устройстве определяется с помощью датчика ускорений - акселерометра 26, который входит в состав блока коррекции 25. Сигнал от акселерометра, пропорциональный величине линейного ускорения, поступает в блок двойного интегрирования 27, который вырабатывает сигнал, пропорциональный величине смещения точки подвеса. Далее сигнал подается в определитель угла коррекции 28, который вырабатывает сигнал, пропорциональный величине угла, на который необходимо довернуть привод плеча, чтобы компенсировать отклонение концевого звена. Функция определителя угла коррекции (ω) может быть представлена формулой:  , где х - величина смещения точки подвеса исполнительного органа, R - расстояние от оси сгибания плеча до центра масс исполнительного органа, k - коэффициент пропорциональности. Знак угла коррекции зависит от направления вектора внешнего воздействия и, соответственно, знака ускорения точки подвеса. Сигнал, пропорциональный углу коррекции, поступает на сумматор 15 в качестве дополнительного сигнала управления. Здесь происходит суммирование всех поступающих сигналов управления, а после преобразования и усиления сигнал поступает на привод, соединенный с исполнительным механизмом сгибания-разгибания плеча. Коррекция выполняется автоматически и компенсирует отклонение, вызванное внешним воздействием, пока оператор-инвалид сам не начнет регулировать положение искусственной руки по прошествии латентного периода за счет движения надплечья, освобожденного в данном устройстве от несения весовой нагрузки исполнительного органа.
, где х - величина смещения точки подвеса исполнительного органа, R - расстояние от оси сгибания плеча до центра масс исполнительного органа, k - коэффициент пропорциональности. Знак угла коррекции зависит от направления вектора внешнего воздействия и, соответственно, знака ускорения точки подвеса. Сигнал, пропорциональный углу коррекции, поступает на сумматор 15 в качестве дополнительного сигнала управления. Здесь происходит суммирование всех поступающих сигналов управления, а после преобразования и усиления сигнал поступает на привод, соединенный с исполнительным механизмом сгибания-разгибания плеча. Коррекция выполняется автоматически и компенсирует отклонение, вызванное внешним воздействием, пока оператор-инвалид сам не начнет регулировать положение искусственной руки по прошествии латентного периода за счет движения надплечья, освобожденного в данном устройстве от несения весовой нагрузки исполнительного органа.
Предложенное устройство протеза руки может быть применено при коротких культях плеча, после одностороннего и двустороннего вычленения плечевого сустава, а также после вычленения ключицы и лопатки.
Технико-экономическая эффективность изобретения заключается в повышении удобства инвалида благодаря повышению точности манипулирования, снижению напряженности при управлении протезом, сокращению времени выполнения целенаправленных двигательных операций.
| название | год | авторы | номер документа |
|---|---|---|---|
| БЛОК | 2014 |
|
RU2554019C1 |
| МНОГОФУНКЦИОНАЛЬНЫЙ АКТИВНЫЙ ПРОТЕЗ РУКИ | 1991 |
|
RU2026654C1 |
| МНОГОФУНКЦИОНАЛЬНЫЙ АКТИВНЫЙ ПРОТЕЗ ПЛЕЧА | 2019 |
|
RU2744605C2 |
| МНОГОФУНКЦИОНАЛЬНЫЙ АКТИВНЫЙ ПРОТЕЗ РУКИ | 1993 |
|
RU2068247C1 |
| МНОГОФУНКЦИОНАЛЬНЫЙ АКТИВНЫЙ ПРОТЕЗ РУКИ | 1993 |
|
RU2068246C1 |
| ПРОТЕЗ ПРЕДПЛЕЧЬЯ | 2015 |
|
RU2615278C2 |
| УСТРОЙСТВО ДЛЯ СРАВНИТЕЛЬНЫХ ИСПЫТАНИЙ СИСТЕМ УПРАВЛЕНИЯ АКТИВНЫХ МНОГОФУНКЦИОНАЛЬНЫХ ПРОТЕЗОВ ПЛЕЧА РАЗРАБОТЧИКОМ СО ЗДОРОВЫМИ РУКАМИ | 2020 |
|
RU2744657C1 |
| Многофункциональный активный ортез руки | 2022 |
|
RU2791396C1 |
| ПРОТЕЗ ПРЕДПЛЕЧЬЯ | 2013 |
|
RU2541816C2 |
| СТЕНД ДЛЯ НАСТРОЙКИ И ИСПЫТАНИЙ МНОГОФУНКЦИОНАЛЬНОГО АКТИВНОГО ПРОТЕЗА ПЛЕЧА | 2019 |
|
RU2729449C1 |
Изобретение относится к медицинской технике. Протез содержит наплечник, исполнительный орган, выполненный в виде трехзвенной шарнирно-рычажной цепи с тремя датчиками углов, датчики независимого управления и системы независимого управления исполнительным механизмом ротации искусственной кисти и исполнительным механизмом искусственной кисти, три системы управления связным движением исполнительных механизмов сгибания-разгибания плеча, предплечья и искусственной кисти, каждая из которых содержит сумматор, два функциональных преобразователя, усилитель мощности и привод, задающий орган, выполненный в виде плоского трехзвенного кинематического аналога исполнительной цепи, содержащий три датчика управления связным движением. При этом протез снабжен жестким креплением исполнительного органа и закрепленным на нем блоком коррекции положения звена плеча, содержащим последовательно соединенные акселерометр, блок двойного интегрирования и определитель угла коррекции. Определитель угла коррекции соединен с сумматором системы управления связным движением сгибания плеча, а жесткое крепление исполнительного органа зафиксировано на корпусе инвалида и выполнено с возможностью свободного перемещения надплечья с наплечником. Применение устройства позволяет повысить точность движений и сократить время их выполнений за счет компенсации перемещений, возникающих при внешнем воздействии на корпус инвалида. 1 ил.
Многофункциональный активный протез руки, содержащий наплечник, исполнительный орган, выполненный в виде трехзвенной шарнирно-рычажной цепи с тремя датчиками углов, датчики независимого управления и системы независимого управления исполнительным механизмом ротации искусственной кисти и исполнительным механизмом искусственной кисти, три системы управления связным движением исполнительных механизмов сгибания-разгибания плеча, предплечья и искусственной кисти, каждая из которых содержит сумматор, два функциональных преобразователя, усилитель мощности и привод, задающий орган, выполненный в виде плоского трехзвенного кинематического аналога исполнительной цепи, содержащий три датчика управления связным движением, отличающийся тем, что он снабжен жестким креплением исполнительного органа и закрепленным на нем блоком коррекции положения звена плеча, содержащим последовательно соединенные акселерометр, блок двойного интегрирования и определитель угла коррекции, при этом определитель угла коррекции соединен с сумматором системы управления связным движением сгибания плеча, а жесткое крепление исполнительного органа зафиксировано на корпусе инвалида и выполнено с возможностью свободного перемещения надплечья с наплечником.
| МНОГОФУНКЦИОНАЛЬНЫЙ АКТИВНЫЙ ПРОТЕЗ РУКИ | 1991 |
|
RU2026654C1 |
| Узел управления протезом верхней конечности | 1990 |
|
SU1755798A1 |
| Многофункциональный активный протезРуКи | 1979 |
|
SU806022A1 |
| ПРОТЕЗ РУКИ | 1992 |
|
RU2085151C1 |
| Многофункциональный активный протез руки | 1984 |
|
SU1223906A1 |
| Криогенная система питания пневматического двигателя | 1984 |
|
SU1195150A1 |
| US 20070021841 A1, 25.01.2007 | |||
| СПОСОБ БОРЬБЫ С ГРИБКОВЫМИ И БАКТЕРИАЛЬНЫМИ ЗАБОЛЕВАНИЯМИ СЕЛЬСКОХОЗЯЙСТВЕННЫХ РАСТЕНИЙ | 2008 |
|
RU2371919C1 |
| WO 2002045621 A3, 13.06.2002 | |||
| US 2005234564 A1, 20.10.2005 | |||
| WRIGHT, F.V | |||
| Measurement of functional outcome with individuals who use | |||

