Предлагаемое техническое решение относится к области транспортного машиностроения, а именно к тормозным системам наземных транспортных средств, управляемых оператором непосредственно из кабины, дистанционно или автономно.
Известна система торможения транспортного средства (патент RU 2514617, дата приоритета 22.01.2008), содержащая контур для передачи оператором с помощью тормозной текучей среды сигналов торможения от одного органа управления на тормозные устройства и, по меньшей мере, один вспомогательный тормоз транспортного средства, средство определения давления, средство определения силы торможения для вспомогательного тормоза в соответствии с измеренной величиной давления текучей среды, средство управления вспомогательным тормозом для пропорционального распределения силы торможения между тормозными устройствами. Основной особенностью системы торможения является управление двумя тормозными системами, рабочей и вспомогательной, с помощью одного органа управления, что упрощает работу оператора.
Недостатками данного технического решения являются низкая надежность системы торможения, определяемая невозможностью длительной работы гидравлической системы при повреждении основного насоса, а также ограниченные функциональные возможности системы торможения.
Известно тормозное устройство с электронным управлением (патент RU 2502622, дата приоритета 11.02.2009), содержащее средства для получения и распределения сжатой текучей среды, средства для модулирования сжатой текучей среды для приведения в действие тормозов, соединенные с электронным центральным блоком управления. Тормозное устройство выполняет функции простого торможения, электронного торможения с использованием антиблокировочной системы, упрощенного маневрирования в ограниченном пространстве, удержания на уклоне, а также антипробуксовочной функции.
Недостатками данного технического решения являются невозможность управления тормозным устройством дистанционно, что ограничивает его функциональные возможности, а также низкая надежность тормозного устройства вследствие наличия на борту пневмогидравлических преобразователей, в которых возможно смешивание двух рабочих сред, сжатого воздуха и сжатой текучей среды.
Наиболее близким к предлагаемому техническому решению является дистанционно управляемая тормозная система (патент US H1,912, дата приоритета 15.12.1998), содержащая приводимые в действие давлением рабочей жидкости тормоза, управляемое устройство регулируемого направления объемов рабочей жидкости от приводимого во вращение двигателем транспортного средства основного источника давления к тормозам по отдельным гидравлическим линиям, независимо приводимый в движение дополнительный источник давления, электрически управляемый блок пропорционального регулирования направления объемов рабочей жидкости, вырабатывающий для него управляющие сигналы электронный блок управления, обменивающийся в свою очередь сигналами с пультом дистанционного управления, находящимся вне транспортного средства.
Недостатком данного технического решения является низкая надежность тормозной системы, в силу наличия в нем двух насосов: для контура с рабочей жидкостью и для контура со сжатым воздухом.
Технический результат предлагаемого изобретения - повышение надежности тормозной системы с одновременным расширением ее функциональных возможностей.
Указанный технический результат достигается тем, что в тормозной системе транспортного средства, содержащей приводимые в действие давлением рабочей жидкости тормоза, управляемое устройство регулируемого направления объемов рабочей жидкости от приводимого во вращение двигателем транспортного средства основного источника давления к тормозам по отдельным гидравлическим линиям, независимо приводимый в движение дополнительный источник давления, электрически управляемый блок пропорционального регулирования направления объемов рабочей жидкости, вырабатывающий для него управляющие сигналы электронный блок управления, обменивающийся в свою очередь сигналами с пультом дистанционного управления, находящимся вне транспортного средства, согласно заявляемому техническому решению, дополнительный источник давления выполнен с возможностью приведения в движение от элемента механической трансмиссии транспортного средства, электрически управляемый блок пропорционального регулирования направления объемов рабочей жидкости функционально продублирован гидравлически управляемым блоком регулирования, а электронный блок управления выполнен с возможностью обмена сигналами с комплексом аппаратуры управления движением в автономном режиме транспортного средства.
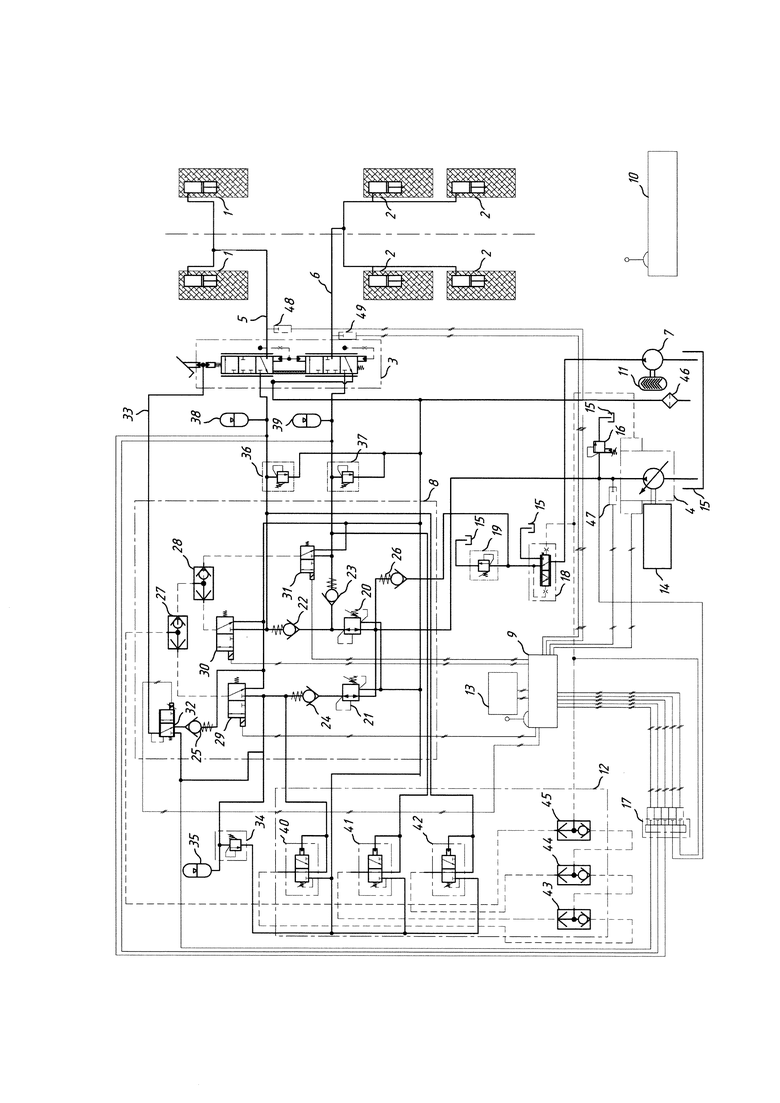
Предлагаемое техническое решение поясняется гидравлической схемой тормозной системы транспортного средства.
Тормозная система транспортного средства содержит приводимые в действие давлением рабочей жидкости тормоза 1 и 2, управляемое устройство 3 регулируемого направления объемов рабочей жидкости от приводимого во вращение двигателем транспортного средства основного источника давления 4 к тормозам 1 и 2 по отдельным гидравлическим линиям 5 и 6, независимо приводимый в движение дополнительный источник давления 7, электрически управляемый блок 8 пропорционального регулирования направления объемов рабочей жидкости, вырабатывающий для него управляющие сигналы электронный блок управления 9, обменивающийся в свою очередь сигналами с пультом дистанционного управления 10, находящимся вне транспортного средства.
Дополнительный источник давления 7 выполнен с возможностью приведения в движение от элемента 11 механической трансмиссии транспортного средства, электрически управляемый блок 8 пропорционального регулирования направления объемов рабочей жидкости функционально продублирован гидравлически управляемым блоком регулирования 12, а электронный блок управления 9 выполнен с возможностью обмена сигналами с комплексом аппаратуры 13 управления движением в автономном режиме транспортного средства.
Основной источник давления 4 приведен во вращение двигателем транспортного средства через коробку отбора мощности 14, рабочая жидкость поступает в него по его гидравлической линии всасывания из бака 15, а его гидравлическая линия нагнетания снабжена предохранительным клапаном 16 и аналоговым датчиком давления 17.
Дополнительный источник давления 7 подключен через приоритетный клапан 18, работающий совместно с предохранительным клапаном 19.
Электрически управляемый блок 8 пропорционального регулирования направления объемов рабочей жидкости имеет в своем составе редукционные клапаны 20 и 21, обратные клапаны 22, 23, 24, 25 и 26, челночные клапаны 27 и 28, электрические золотниковые распределители 29, 30 и 31, электрический пропорциональный золотниковый распределитель 32, приводящий в действие управляемое устройство 3 регулируемого направления объемов рабочей жидкости по гидравлической линии 33, снабженной предохранительным клапаном 34 и пневмогидроаккумулятором 35.
Отдельные гидравлические линии 5 и 6 также снабжены предохранительными клапанами 36 и 37, пневмогидроаккумуляторами 38 и 39.
Гидравлически управляемый блок регулирования 12 содержит гидравлически управляемые золотниковые распределители 40, 41, 42, челночные клапаны 43, 44, 45.
Сливная гидравлическая линия снабжена фильтром 46.
Электронный блок управления 9 получает информационные сигналы от аналоговых датчиков температуры 47, давления 48 и 49.
Предлагаемое техническое решение работает следующим образом.
Основной источник давления 4 механически приведен во вращение двигателем транспортного средства через коробку отбора мощности 14. Рабочая жидкость поступает из бака 15 в основной источник давления 4. Предохранительный клапан 16 предотвращает избыточное давление в гидравлической линии нагнетания основного источника давления 4.
При неприводимом во вращение двигателем транспортного средства через коробку отбора мощности 14 или неисправном основном источнике давления 4 тормозной системе позволяет безотказно работать приоритетный клапан 18. В случае возникновения неисправности от основного источника давления 4 на приоритетный клапан 18 поступает гидравлический управляющий сигнал и поток рабочей жидкости от дополнительного источника давления 7 отключается от предохранительного клапана 19 и поступает в гидравлическую линию нагнетания через обратный клапан 26. Возможность приведения в движение дополнительного источника 7 от элемента 11 механической трансмиссии транспортного средства (например, вращающегося колеса) обеспечивает длительную работу тормозной системы в вышеописанном аварийном режиме. Таким образом, обеспечивается повышенная надежность тормозной системы путем резервирования ее компонентов, необходимая для ее функционирования под управлением оператора непосредственно из кабины, дистанционно и автономно.
Из гидравлической линии нагнетания рабочая жидкость попадает в электрически управляемый блок 8 пропорционального регулирования направления объемов рабочей жидкости. Здесь рабочая жидкость поступает на редукционные клапаны 20 и 21. Редукционный клапан 20 отвечает за поддержание требуемого давления в отдельных гидравлических линиях 5 и 6, связанных соответственно с тормозами 1 и 2 через управляемое устройство 3 регулируемого направления объемов рабочей жидкости, в случае управления оператором непосредственно из кабины приводимое в действие нажатием на педаль. Предохранительные клапаны 36 и 37 ограничивают давление в отдельных гидравлических линиях 5 и 6, связанных с пневмогидроаккумуляторами 38 и 39, которые сглаживают колебания давления рабочей жидкости, а также выступают в роли источника энергии в случае возникновения общей неисправности основного источника давления 4 и дополнительного источника давления 7, обеспечивают возможность многократного полного торможения с сохранением тормозной эффективности. При работе пневмогидроаккумуляторов 38 и 39 возможен слив жидкости в бак 15 через неработающий основной источник давления 4, для предотвращения этого необходимы обратные клапаны 22 и 23, отделяющие также гидравлическую линию 5 тормозов 1 от гидравлической линии 6 тормозов 2.
Редукционный клапан 21 обеспечивает требуемое давление рабочей жидкости в гидравлической линии 33, приводящее в действие управляемое устройство 3 регулируемого направления объемов рабочей жидкости к тормозам 1 и 2, в случае его работы дистанционно или автономно. Управление потоком жидкости осуществляется через электрический пропорциональный золотниковый распределитель 32. В этой гидравлической линии также предусмотрены пневмогидроаккумулятор 35 и предохранительный клапан 34. При работе системы через пневмогидроаккумулятор 35 также возможен слив рабочей жидкости в бак 15 через основной источник давления 4, для предотвращения этого в системе установлен обратный клапан 24. Обратный клапан 25 необходим для предохранения пропорционального золотникового распределителя 32 от обратного тока рабочей жидкости при работающей на слив прочей гидроаппаратуры, что позволяет предотвратить произвольное срабатывание управляемого устройства 3 регулируемого направления объемов рабочей жидкости к тормозам 1 и 2.
Приведение в действие управляемого устройства 3 подачи давления рабочей жидкости к тормозам 1 и 2 посредством пульта дистанционного управления 10, которым управляет оператор, или посредством комплекса аппаратуры 13 управления движением в автономном режиме транспортного средства реализуется благодаря пропорциональному золотниковому распределителю 23 следующим образом. В режиме дистанционного управления оператор выдает управляющий сигнал о торможении с определенным усилием электронному блоку управления 9 посредством пульта дистанционного управления 10. Электронный блок управления 9 в свою очередь выдает советующий электрический управляющий сигнал на золотниковый распределитель 32, который, работая как управляемый редукционный клапан, подает на управляемое устройство 3 регулируемого направления объемов рабочей жидкости к тормозам 1 и 2 гидравлическое управляющее внешнее воздействие с определенным значением давления рабочей жидкости. Реализуемое электрическим пропорциональным золотниковым распределителем 32 давление рабочей жидкости обеспечивает определенную степень открытия управляемого устройства 3 регулируемого направления объемов рабочей жидкости и, как следствие, реализуемое тормозное усилие на тормозах 1 и 2. В режиме автономного управления комплекс аппаратуры 13 управления движением в автономном режиме транспортного средства выдает управляющий сигнал о торможении с определенным усилием электронному блоку управления 9 вместо оператора и далее система работает аналогично режиму дистанционного управления. Выдача электронным блоком управления 9 информационного сигнала о текущем состоянии тормозной системы комплексу аппаратуры 13 управления движением в автономном режиме транспортного средства может использоваться для приведения его в действие при необходимости предотвращения аварийной ситуации в режимах непосредственного и дистанционного управления. Такое резервирование управления повышает надежность тормозной системы в условиях расширенных функциональных возможностей.
Чувствительность тормозной системы к нагрузке достигается автоматическим регулированием внутреннего объема основного источника давления 4. Аналоговый датчик давления 17 постоянно регистрирует давление в отдельных гидравлических линиях 5 и 6, направляющих рабочую жидкость соответственно к тормозам 1 и 2 и в гидравлической линии 33, направляющей рабочую жидкость при дистанционном и автономном торможении. При падении требуемого давления в соответствующей гидравлической линии датчик давления передает эту информацию в электронный блок управления 9, который выдает управляющий сигнал на соответствующий электрический золотниковый распределитель 29, 30 или 31. Так при активации одного из золотниковых распределителей 29, 30 или 31 гидравлический управляющий сигнал, равный текущему давлению в соответствующем гидравлическом контуре, поступает в регулятор внутреннего объема основного источника давления 4. При увеличении подачи основного источника давления 4 в соответствующую гидравлическую линию поступает рабочая жидкость, которая заполняет соответствующий пневмогидроаккумулятор. Таким образом, давление в контуре растет и при достижении требуемого значения аналоговый датчик давления 17 передает текущее значение давления в электронный блок управления 9, который деактивирует золотниковый распределитель 29, 30 или 31 подпитываемой гидравлической линии и тем самым уменьшает подачу основного источника давления 4. Если давление падает сразу в нескольких гидравлических линиях 5, 6 или 33, то активизируется сразу несколько из золотниковых распределителей 29, 30 или 31. В этом случае для обеспечения максимального значения требуемой подачи основного источника давления 4 управляющие гидравлические сигналы сравниваются между собой по значению в челночных клапанах 27 и 28. Таким образом, основной источник давления 4 обеспечивает подачу, соответствующую наибольшему по значению гидравлическому управляющему сигналу.
Для обеспечения стабильной и безотказной работы тормозной системы, управляемой оператором непосредственно из кабины, дистанционно или автономно, электрически управляемый блок 8 пропорционального регулирования направления объемов рабочей жидкости дублируется гидравлически управляемым блоком регулирования 12. Так, к каждой гидравлической линии 5, 6 направляющей рабочую жидкость соответственно к тормозам 1 и 2 и в гидравлической линии 33, направляющей рабочую жидкость при дистанционном и автономном торможении, подключены гидравлически управляемые золотниковые распределители 40, 41 и 42. При падении требуемого давления в соответствующей гидравлической линии 5, 6 или 33 гидравлически управляемый золотниковый распределитель 40, 41 или 42 переключается и гидравлический управляющий сигнал, равный текущему давлению в соответствующем гидравлическом контуре, поступает в регулятор внутреннего объема основного источника давления 4. Далее система работает так же, как это описано для управляющих золотников с электронным управлением. Челночные клапаны 43, 44 и 45 обеспечивают сравнение гидравлических управляющих сигналов, поступающих от электрически управляемых золотниковых распределителей и от гидравлически управляемых золотниковых распределителей. Так же аналоговый датчик давления 17 измеряет давление управляющего гидравлического сигнала, поступающего в основной источник давления 4, а также значение давления рабочей жидкости, подаваемой источником. Аналоговый датчик температуры 47 измеряет температуру рабочей жидкости. Подобные измерения позволяют системе автоматически регулировать работу оборудования, а также регистрировать ошибки и неисправности работы тормозной системы, предотвращая аварийные ситуации.
Аналоговые датчики давления 48 и 49 необходимы для реализации электрической обратной связи в системе, что позволяет регулировать степень открытия электрического пропорционального золотникового распределителя 32 при дистанционном и автономном торможении, для регистрации неисправностей в гидравлических линиях 5, 6 и 33, для выдачи электронным блоком управления 9 информационного сигнала в комплекс аппаратуры 13 управления движением в автономном режиме транспортного средства с последующим выполнением сопутствующих операций, а также предотвращением аварийных ситуаций.
Данное изобретение разработано в рамках выполнения работ по Соглашению от «21» июня 2019 г. №075-15-2019-1366 (14.577.21.0287) МГТУ им. Н.Э. Баумана с Министерством науки и высшего образования Российской Федерации. Уникальный идентификатор RFMEFI57718X0287.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система гидроприводов с резервированным контуром управления растормаживанием нагрузки | 2024 |
|
RU2828814C1 |
| Гидравлическое устройство для рекуперации энергии торможения транспортного средства | 1986 |
|
SU1357259A1 |
| ГИДРАВЛИЧЕСКАЯ СИСТЕМА САМОЛЕТА | 2010 |
|
RU2455197C1 |
| Система управления гидродинамическим тормозом-замедлителем | 1980 |
|
SU950567A1 |
| ТОРМОЗ ПРИЦЕПА | 2019 |
|
RU2729334C1 |
| Гидрообъемная трансмиссия транспортного средства с рекуперативным приводом | 1978 |
|
SU779105A1 |
| Устройство для натяжения гусеничной цепи транспортного средства | 1985 |
|
SU1244000A2 |
| АВТОНОМНЫЙ ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ РУЛЕВОЙ ПРИВОД | 2008 |
|
RU2378539C1 |
| ПРУЖИННО-ГИДРАВЛИЧЕСКИЙ ВАГОННЫЙ ЗАМЕДЛИТЕЛЬ | 2006 |
|
RU2337028C2 |
| УСТРОЙСТВО ДЛЯ РЕКУПЕРАЦИИ ЭНЕРГИИ ТРАНСПОРТНОГО СРЕДСТВА | 2000 |
|
RU2193977C2 |
Предлагаемое техническое решение относится к области транспортного машиностроения, а именно к тормозным системам наземных транспортных средств, управляемых оператором непосредственно из кабины, дистанционно или автономно. Тормозная система транспортного средства содержит приводимые в действие давлением рабочей жидкости тормоза, управляемое устройство регулируемого направления объемов рабочей жидкости от приводимого во вращение двигателем транспортного средства основного источника давления к тормозам по отдельным гидравлическим линиям, независимо приводимый в движение дополнительный источник давления, электрически управляемый блок пропорционального регулирования направления объемов рабочей жидкости, вырабатывающий для него управляющие сигналы электронный блок управления, обменивающийся в свою очередь сигналами с пультом дистанционного управления, находящимся вне транспортного средства, согласно заявляемому техническому решению дополнительный источник давления выполнен с возможностью приведения в движение от элемента механической трансмиссии транспортного средства, электрически управляемый блок пропорционального регулирования направления объемов рабочей жидкости функционально продублирован гидравлически управляемым блоком регулирования, а электронный блок управления выполнен с возможностью обмена сигналами с комплексом аппаратуры управления движением в автономном режиме транспортного средства. Технический результат предлагаемого изобретения - повышение надежности тормозной системы с одновременным расширением ее функциональных возможностей. 1 ил.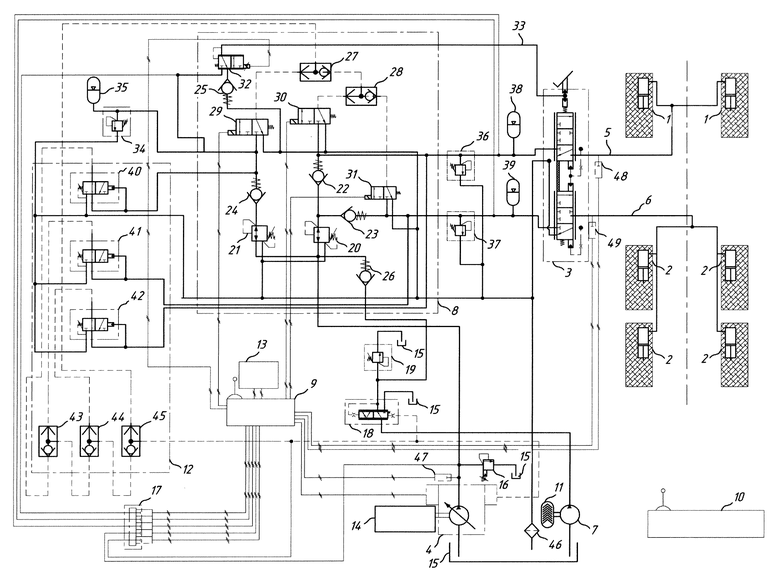
Тормозная система транспортного средства, содержащая приводимые в действие давлением рабочей жидкости тормоза, управляемое устройство регулируемого направления объемов рабочей жидкости от приводимого во вращение двигателем транспортного средства основного источника давления к тормозам по отдельным гидравлическим линиям, независимо приводимый в движение дополнительный источник давления, электрически управляемый блок пропорционального регулирования направления объемов рабочей жидкости, вырабатывающий для него управляющие сигналы электронный блок управления, обменивающийся в свою очередь сигналами с пультом дистанционного управления, находящимся вне транспортного средства, отличающаяся тем, что дополнительный источник давления выполнен с возможностью приведения в движение от элемента механической трансмиссии транспортного средства, электрически управляемый блок пропорционального регулирования направления объемов рабочей жидкости функционально продублирован гидравлически управляемым блоком регулирования, а электронный блок управления выполнен с возможностью обмена сигналами с комплексом аппаратуры управления движением в автономном режиме транспортного средства.
| US 20190248350 A1, 15.08.2019 | |||
| УСТРОЙСТВО для ИССЛЕДОВАНИЯ и ТРЕНИРОВКИ ЗРИТЕЛЬНОГО ВОСПРИЯТИЯ СКОРОСТИ ВРАЩАТЕЛЬНОГОДВИЖЕНИЯ | 0 |
|
SU167274A1 |
| DE 102014200071 A1, 11.09.2014. | |||

