Изобретение относится к транспортным средствам, в частности к органам управления тормозами, предназначенных для прицепов, и приводимых в действие электрическим сигналом торможения (стоп-сигналом) автомобиля-тягача, и может быть использовано на прицепах для грузовых и легковых автомобилей, у которых тормозная система (ТС) имеет гидравлический привод.
Из уровня техники известно, что если тормозной привод автомобиля является гидравлическим, то из-за возможной разгерметизации его во время стыковки с тормозным приводом прицепа в настоящий момент в мировом автостроении не существует комбинации «гидравлический привод ТС автомобиля» и «привод ТС прицепа». Таким образом, на прицепе возможна тормозная система, привод которой является составной частью привода автомобиля-тягача только в том случае, если привод рабочей тормозной системы автомобиля является пневматическим.
В настоящее время мировое автостроение ежегодно производит 55 млн автомобилей в год, из них 45 млн - легковых. Известно, что тормозная система легкового автомобиля всегда имеет гидравлический привод. Поэтому автомобили категории M1 (легковые автомобили) не могут иметь объединенного тормозного привода с прицепом, когда необходима комбинация «автомобиль категории M1 + прицеп». Сказанное полностью относится и к существенной части грузовых автомобилей. Так, на автомобилях полной массой до 3,5 т (категория N1) тормозной привод всегда гидравлический. Гидравлический привод используется и на значительной части автомобилей категории N2.
Таким образом, только на 10-12% всех автомобилей (это категории N2, N3) существует пневмопривод. При этом до 90% остальных автомобилей (это в первую очередь легковые) не могут иметь объединенный с прицепом тормозной привод. Поэтому существующие прицепы для автомобилей категории M1 и N1 или не имеют своей тормозной системы, или она крайне несовершенна по тормозным качествам. Так, практически все прицепы категории O1 (с полной массой не более 750 кг) лишены тормозной системы, а на прицепах категории O2 (с полной массой более 750 кг, но не более 3,5 т) тормозная система представляет некий суррогат из тормозных механизмов и тормозного привода (тормоз наката инерционного типа), срабатывающего при накатывании прицепа на тормозящий автомобиль.
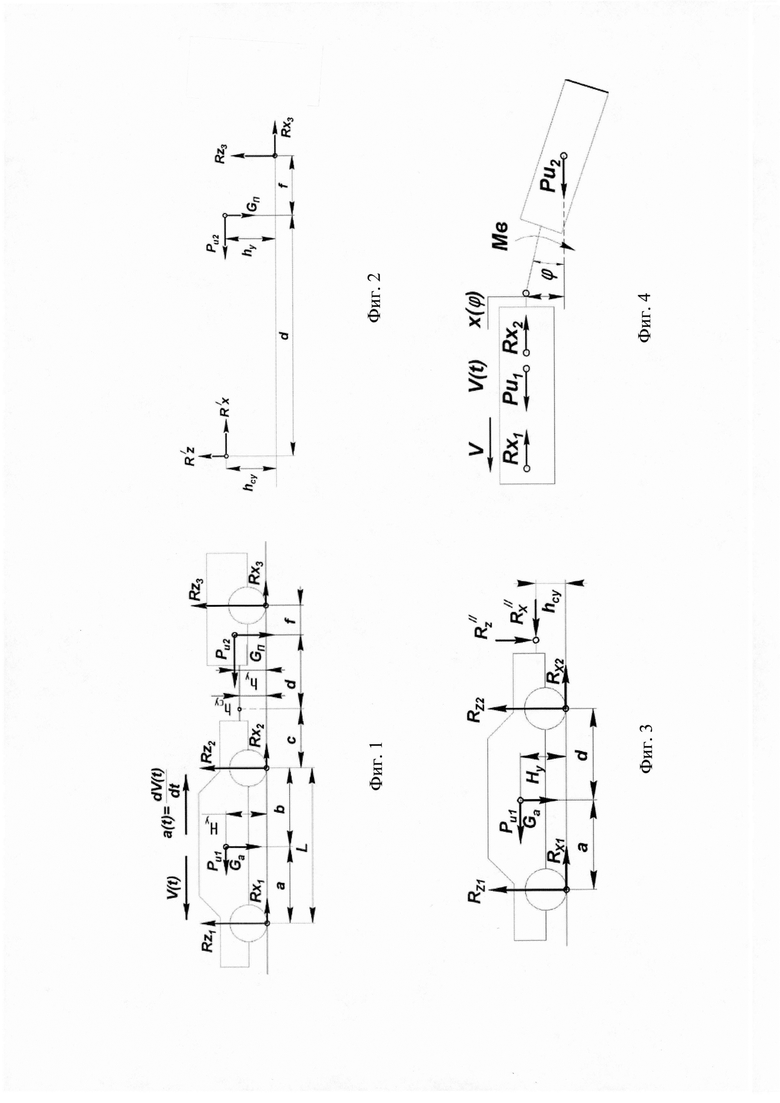
На фиг. 1 представлена схема сил при замедлении автопоезда, у которого прицеп имеет тормозную систему:
где  - силы инерции автомобиля и прицепа (приложены в центре масс); Rzi - вертикальные реакции со стороны дороги на соответствующую ось автомобиля и прицепа; Rxi - силы сцепления соответствующих колес автопоезда с дорогой (тормозные силы); Ga, Gn - вес автомобиля и прицепа соответственно; Hy, hy, hcy - высота центра масс автомобиля, прицепа и расстояние от дороги до тягово-сцепного устройства соответственно.
- силы инерции автомобиля и прицепа (приложены в центре масс); Rzi - вертикальные реакции со стороны дороги на соответствующую ось автомобиля и прицепа; Rxi - силы сцепления соответствующих колес автопоезда с дорогой (тормозные силы); Ga, Gn - вес автомобиля и прицепа соответственно; Hy, hy, hcy - высота центра масс автомобиля, прицепа и расстояние от дороги до тягово-сцепного устройства соответственно.
На фиг. 2 - изображена схема сил, действующих на прицеп при торможении, где R'z, R'x - реакции в сцепном устройстве.
Рассмотрим динамику торможения прицепа с использованием схемы на фиг. 2. Горизонтальная реакция в тягово-сцепном устройстве (соединительной головке):
Сила сцепления Rx3 (тормозная сила прицепа) определяется выражением:
Rx3=Rz3×ϕх,
где ϕх - коэффициент сцепления колеса прицепа с дорогой в продольном направлении.
Окончательно:

где mn - масса прицепа.
Сумма моментов относительно сцепного устройства:

Вертикальная реакция на колесе прицепа:
Остальные реакции:
Представленные дифференциальные уравнения приобретают более простые соотношения, если рассматривается прицеп с центральной осью категории O1 (без тормозной системы), для которого ƒ=0. Примем hcy=hy. Тогда реакции R'x и R'z примут простые выражения:
R'z=0.
Силы, действующие при торможении на автомобиль (прицеп заменен реакциями R''х и R''z), приведены на фиг. 3.
Из приведенной на фиг. 3 схемы интерес представляют реакции на задних колесах автомобиля, так как их значения определяют потерю устойчивости автопоезда. Для реакции Rz2 (учитывая R'z=R''z=0):

Из этого выражения видно, что величина реакции Rz2 уменьшается не только из наличия второго члена числителя (как у одиночного автомобиля), но и из-за действия прицепа (R''x). В то же время уменьшение вертикальной реакции Rz2 при торможении увеличивает вероятность блокировки задних колес автомобиля. Но блокирование задних колес снижает коэффициент поперечного сцепления ϕу колеса с дорогой практически до нуля. Такой режим качения колес заднего моста с большой вероятностью приводит к поперечному заносу автомобиля, а для системы «автомобиль - прицеп» - к складыванию автопоезда.
Уменьшение вертикальной реакции Rz2 не единственная причина складывания автопоезда. Рассмотрим модель в плане автопоезда с прицепом O1 без тормозной системы. На фиг. 4 представлена схема сил в плане, действующих на автопоезд:
Rx1, Rx2 - суммарные силы сцепления передних и задних колес автомобиля; ϕ - угол отклонения прицепа от прямолинейного движения при складывании автопоезда; Х(ϕ) - текущее плечо; МВ - возмущающий момент.
Из приведенной схемы:
где RЭ - эквивалентная реакция, действующая на автомобиль.
Из последних выражений следует, что RЭ и  образуют пару сил с текущим плечом Х(ϕ), что приводит к появлению возмущающего момента МВ, направленного на складывание автопоезда (потеря устойчивости). Таким образом, рассмотренные факторы показывают, что при интенсивном торможении и отсутствии тормозной системы на прицепе появляется большая вероятность складывания автопоезда (потеря устойчивости), что может неизбежно привести к ДТП.
образуют пару сил с текущим плечом Х(ϕ), что приводит к появлению возмущающего момента МВ, направленного на складывание автопоезда (потеря устойчивости). Таким образом, рассмотренные факторы показывают, что при интенсивном торможении и отсутствии тормозной системы на прицепе появляется большая вероятность складывания автопоезда (потеря устойчивости), что может неизбежно привести к ДТП.
Существующие конструкции тормозной системы в прицепах категории O1 и О2 в качестве приводной силы в тормозном приводе реализуют силу горизонтального взаимодействия между автомобилем и прицепом (реакция R'x на фиг. 2). При этом инерционная система прицепа включает в себя управляющее устройство, тормозной привод и колесные тормоза. Управляющее устройство инерционной тормозной системы состоит из комплекта деталей, интегрированных с тягово-сцепным устройством (соединительной головкой). В целом такую систему нередко обозначают как тормоз наката инерционного типа.
Тормоз наката используется, как правило, на прицепах с центральной осью. Прицеп с центральной осью - это буксируемое транспортное средство, оборудованное буксировочным устройством, которое не может перемещаться вертикально относительно прицепа и ось колес которого расположена (при равномерной загрузке) вблизи центра масс транспортного средства таким образом, что на тягач передается незначительная вертикальная статическая нагрузка, не превышающая 10% максимального веса прицепа, или 10 кН (в зависимости от того, какая величина меньше).
Наличие тормозной системы в виде тормоза наката у прицепа улучшает динамику торможения автопоезда. Однако полностью устранить приведенные выше причины, способствующие потере устойчивости автопоезда, такая конструкция тормозной системы принципиально не может. Эта генетическая принципиальность заключается в том, что для работы тормозной системы с тормозом наката обязательно наличие значительной силы R'x (см. фиг. 2). Более того, с появлением такой тормозной силы возникают продольных колебаний прицепа относительно автомобиля и значительно возрастает вероятность складывания автопоезда, что в целом приводит к потере устойчивости его в процессе торможения.
Интенсивные продольные колебания способны привести к потере устойчивости автопоезда. Кроме того, существует еще один серьезный недостаток прицепа с тормозом наката. Так, при экстренном (аварийном) торможении темп нарастания толкающего усилия со стороны прицепа на автомобиль таков, что максимальное значение усилия R''x (фиг. 3) достигает 6 кН и больше при полной массе прицепа 750 кг. Такое торможение, как показывает практика, почти всегда заканчивается складыванием автопоезда (полная потеря устойчивости).
В качестве аналога принят патент №2013252 (электрогидравлический привод тормоза наката). Недостаток такого тормоза отмечен выше, т.е. все недостатки тормоза наката.
Здесь и далее рассматриваются тормозные системы прицепа как системы автоматического регулирования - САР.
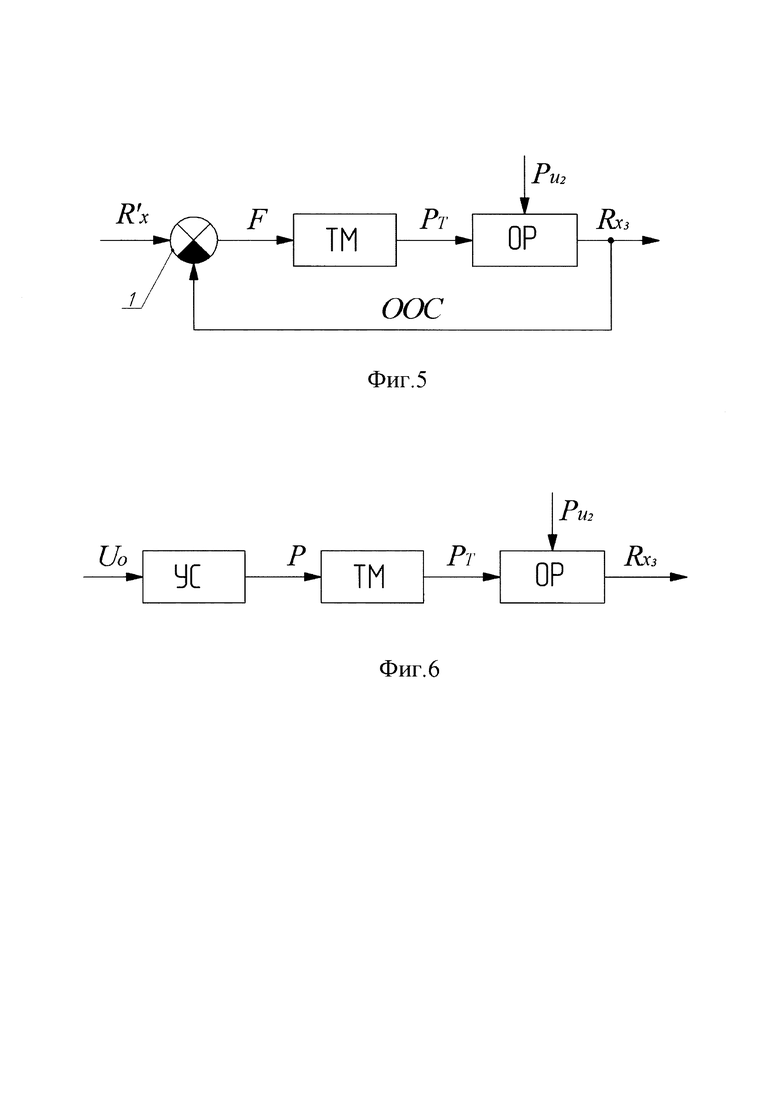
На фиг. 5 представлена структурная схема САР указанного аналога, где F - гидравлическая сила равная F=R'x-Rх3, ТМ - тормозной механизм прицепа, Рт - тормозная сила на колеса со стороны ТМ прицепа, ОР - объект регулирования (прицеп), Rx3 - регулируемая величина (тормозная сила прицепа), ООС - обратная единичная отрицательная связь.
Указанная САР относится к замкнутым системам автоматического регулирования прямого действия (САР без внешнего источника энергии). В такой САР возникает проблема потери устойчивости из-за наличия ООС и низкой точности регулирования выходной величины Rx3. При этом отклонение Rx3 от R'x на элементе сравнения 1 имеет очень грубую и значительную величину при накате прицепа на автомобиль-тягач, что дополнительно с продольными колебаниями приводит к потере устойчивости автопоезда. В целом эти факторы не могут обеспечить качественное управление торможением прицепа.
Из уровня техники известен тормоз прицепа, содержащий главный тормозной цилиндр со встроенным гидроаккумулятором, закрепленный на раме прицепа, шток которого через рычажно-шарнирный передаточный механизм связан с рычагом подвески подрессоренной оси прицепа. При этом главный тормозной цилиндр двумя трубопроводами связан с компенсационным бачком, а напорной магистралью, в которую включен двухпозиционный гидрораспределитель с электрическим управлением - с колесными тормозными цилиндрами. Электрический сигнал управления к гидрораспределителю поступает от цепи сигнала торможения автомобиля-тягача (патент РФ №2056310).
Большим недостатком этого аналога является то, что зарядить энергией гидроаккумулятор на обычных по ровностям дорогах очень сложно, т.к. требуется большой ход подвески, что возможно только при движении автопоезда по разбитым дорогам с большими неровностями.
С точки зрения САР тормозная система указанного аналога относится к САР разомкнутого типа с программным управлением. В такой САР отсутствует обратная связь. Структурная схема САР аналога представлена на фиг. 6. Программа указанного аналога работает по простейшему алгоритму:

При такой программе управления для любого режима торможения автомобиля тормозная система прицепа при наличии сигнала U0, который подается на вход усилителя УС (фиг. 6), всегда включается на режим экстренного торможения, что никак не может являться качественным процессом торможения. Существует только один положительный момент для такой разомкнутой САР (у которой отсутствует ОС) - она обладает запасом устойчивости. Но это положительное свойство рассматриваемой САР не устраняет ее главный недостаток - отсутствие регулирования тормозных сил прицепа в зависимости от режима торможения автомобиля-тягача.
Целью изобретения является обеспечение эффективности торможения прицепа.
Технический результат заключается в повышении точности, быстродействия тормозной системы прицепа и запаса устойчивости автопоезда.
Технический результат достигается реализацией следующих основных признаков: тормоз прицепа, приводимый в действие от сигнала тормозной системы автомобиля-тягача, содержащий магистраль тормозного привода, который не связан с магистралью тормозного привода автомобиля, а также блок управления тормозной системы, гидроаккумулятор, электроклапаны, накопительный бачок и привод тормозного механизма, отличающийся тем, что блок управления состоит из трех параллельно соединенных элементов-гидравлического золотникового распределителя, двухрежимного гидроэлемента и упругого устройства, размещенных в одном корпусе, который неподвижно закреплен на раме прицепа, а все штоки элементов жестко соединены между собой, и через головку тягово-сцепного устройства (ТСУ) соединены с автомобилем-тягачом, при этом двухрежимный элемент выполнен с функцией гидрозамка в тяговом режиме автомобиля и демпфера продольных колебаний - в режиме торможения, упругое устройство имеет функцию упругой связи тягача с прицепом, а гидравлический золотниковый распределитель выполнен с функцией следящей системы, которая обеспечивает оптимальный тормозной режим прицепа, к тому же упомянутые три элемента совместно с элементами тормозного механизма (ТМ) и прицепа (ОР) образуют замкнутую систему автоматического регулирования (САР), работающую по отклонению с демпфирующим элементом в обратной отрицательной связи, а в прямой ветви САР - усилитель на основе гидравлического золотникового распределителя (УС), играющего роль П-регулятора, тормозного механизма (ТМ) и прицепа (ОР), и элементом сравнения на входе САР в виде упругого устройства.
Кроме того содержит электронасос, обеспечивающий энергией торможение прицепа, с возможностью включения электронасоса от сигнала ближнего и (или) дальнего света, а также габаритных огней.
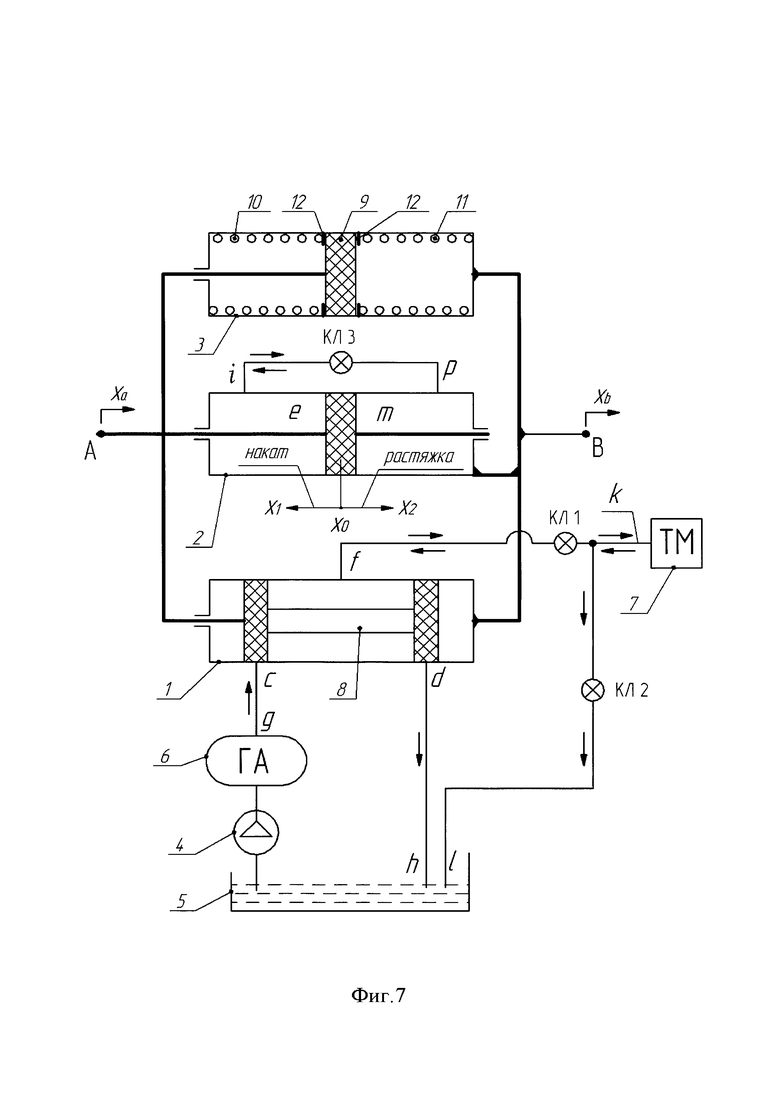
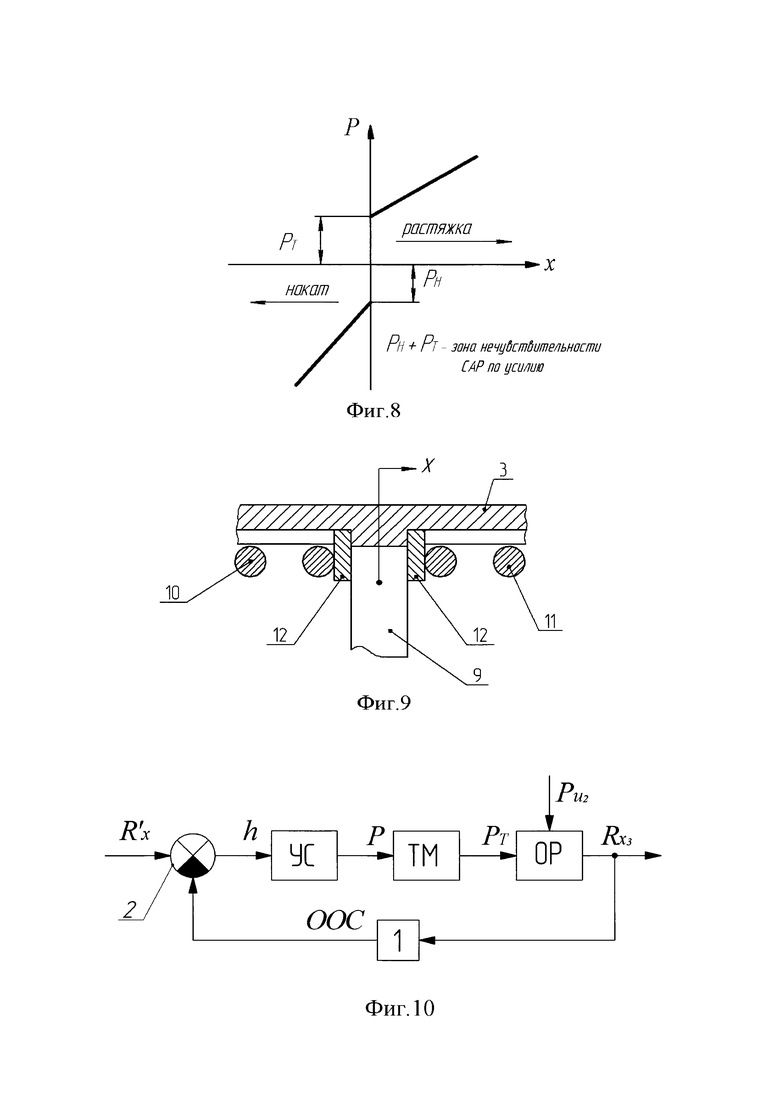
На чертежах изображены: На фиг. 7 - схема автономной тормозной системы прицепа; на фиг. 8 - характеристика упругого устройства; на фиг. 9 - конструкция, обеспечивающая нелинейность упругой характеристики упругого устройства 3 (фиг. 7); на фиг. 10 - структурная схема САР тормоза прицепа.
Тормоз прицепа состоит из трех параллельно соединенных элементов: (фиг. 7) гидравлического золотникового распределителя 1, двухрежимного гидроэлемента 2 и упругого устройства 3, размещенных в одном корпусе, который неподвижно закреплен на раме прицепа (точка В). При этом все штоки элементов жестко соединены между собой и через головку тягово-сцепного устройства (ТСУ) соединены с автомобилем-тягачом (точка А). Система тормоза прицепа также содержит электронасос 4, компенсационный (сливной) бачок 5 и гидроаккумулятор (ГА) 6, соединенные магистралью gc с гидравлическим двухпозиционным распределителем 1, который также соединен с бачком сливной магистралью dh и нагнетательной магистралью ƒk с приводом тормозного механизма (ТМ) 7 через электроклапан кл. 1, а сливная магистраль kl тормозного механизма ТМ 7 через электроклапан кл. 2 соединена с бачком 5. Двухрежимный гидроэлемент 2 содержит поршень со штоками, отдельные полости Е и М, которые соединены магистралью ip через электроклапан кл. 3 при его включении. Гидравлический золотниковый распределитель 1 содержит двухкромочный золотник 8. Упругое устройство 3 содержит упорный поршень 9, пружину растяжки 11 и пружину наката 10, а также опорные подвижные шайбы (кольца) 12.
Тормоз прицепа работает следующим образом:
При включении ближнего света (габаритных огней) включается электронасос 4, который качает тормозную жидкость из бачка 5. Жидкость нагнетается в гидроаккумулятор (ГА) 6. При достижении определенного давления в ГА, например 7 МПа, электронасос 4 выключается.
Энергия ГА расходуется на привод тормозного механизма (ТМ) 7 при торможении прицепа. При движении автопоезда без торможения золотник 8 занимает положение как на фиг. 7. Нагнетательная магистраль gc и сливная магистраль dh перекрыты кромками золотника 8. Двухрежимный гидроэлемент 2 находится в режиме жесткого звена (гидрозамка), т.к. клапан кл. 3 выключен, что препятствует перетеканию жидкости между полостями Е и М. При работе элемента 2 в режиме гидрозамка точки А и В оказываются соединенными жестким звеном. Клапан кл 1 закрыт, клапан кл 2 открыт и тормозной механизм ТМ 7 находится в расторможенном состоянии.
В начальной фазе торможения автомобиля включается сигнал торможения и этим же электрическим сигналом Uт открываются клапаны кл 1 и кл 3, клапан кл 2 закрывается. Элемент 2 переходит из режима гидрозамка в режим демпфирования продольных колебаний прицепа относительно автомобиля (жесткое звено 2 переходит в режим подвижного). Блок управления разблокирован и находится в состоянии готовности регулирования работы тормозного механизма ТМ 7.
В следующей фазе нарастает тормозная сила на колесах автомобиля, при этом происходит накат прицепа на автомобиль, точки А и В сближаются, золотник 8 смещается влево (фиг. 7). Для начального смещения требуется преодолеть усилие Рн предварительно сжатой пружины наката 10 (фиг. 8 и 9) упругого устройства 3 на фиг. 7. Усилие Рн не должно превышать значения 20-40 Н. При смещении золотника 8 влево его левая кромка обеспечивает подачу тормозной жидкости из ГА 6 по нагнетательной магистрали gc через точку ƒ и открытый клапан кл 1 в колесный тормозной цилиндр тормозного механизма ТМ 7. Происходит нарастание тормозных сил прицепа, что является причиной движения золотника 8 вправо до перекрытия магистрали gc левой кромкой золотника 8. Тормозной механизм ТМ 7 отключается от ГА 6 при достижении усилия растяжки Рт (фиг. 8 и 9) между автомобилем и прицепом. Т.к. усилие Рт направленно против движения автопоезда, то оно обеспечивает «противоскладывание» автопоезда и гарантирует автопоезд от поперечного заноса, т.е. устойчивость режима торможения. Усилие Рт растяжки представляет избыточное значение тормозной силы Rx3 прицепа над инерционной силой Ри2, т.е. Рт=Rx3- Ри2 в начальной фазе торможения, при этом Рт≠Rx3 (фиг. 2).
Для получения требуемой упругой характеристики (фиг. 8), предварительно сжатая пружина растяжки 11 в исходном состоянии опирается на одну из опорных шайб 12 (фиг. 9), которая в свою очередь упирается в поршень 9. Сказанное справедливо и для пружины наката 10. При смещении влево (вправо) упорного поршня 9 из исходного положения необходимо преодолеть усилие предварительно сжатой пружины 10 или 11. Это обеспечивает минимальную нелинейную зону нечувствительности САР для обеспечения устойчивости при любом режиме торможения.
При дальнейшем увеличении замедления автомобиля увеличивается и замедление прицепа за счет увеличения тормозной силы прицепа Rx3 так, что R'х→Рт.
При уменьшении замедления автомобиля золотник 8 смещается вправо, тормозная жидкость из ТМ 7 сливается через точку ƒ и сливную магистраль dh. Такой режим продолжается до момента, соответствующего условию R'х→Рт. Усилия растяжки Рт препятствуют складыванию автопоезда, ее значение может соответствовать 300-400 Н.
При растормаживании автомобиля электрический сигнал торможения выключается. При этом клапаны кл1 и кл3 перекрывают соответствующие магистрали. Элемент 2 блокирует перемещения блока управления. Жидкость из ТМ 7 сливается через открытый клапан кл2 в бачок 4. Привод тормозной системы прицепа 7 отключается.
Таким образом, при движении автопоезда в тяговом режиме его сцепное устройство представляет жесткий соединительный элемент, а при торможении за счет блока управления всегда выполняется условие R'→Рт. Такое условие обеспечивается следящими свойствами гидравлического распределителя 1 (фиг. 7). 
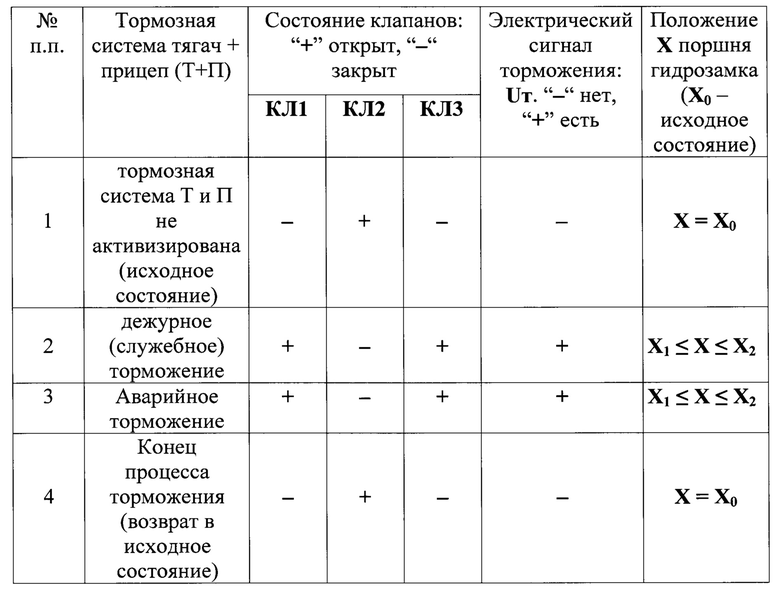
Примечание: кл3 в п.п. 4 закроется, т.е. перейдет в исходное состояние, когда будут выполнены условия Uт=0 и X=Х0 (реализация этого алгоритма в описании не приводится). При этом первое условие Uт=0 выполняется сразу с прекращением торможения автопоезда, а второе - спустя промежуток времени t, пока поршень гидрозамка 2 на фиг. 7 в процессе продольных колебаний прицепа не займет положение X=Х0.
На фиг. 10 представлена структурная схема САР предлагаемого решения. Указанная САР устраняет недостатки САР на фиг. 5 и 6. САР работает по отклонению с П-регулятором (П - пропорциональный регулятор). В качестве П-регулятора представлен золотниковый распределитель (УС), входной величиной (ошибкой регулирования) которого является перемещение h золотника (на фиг. 10), а выходной - давление тормозной жидкости Р. Входная величина формируется на сравнивающем элементом 3 (на фиг. 7) и 2 (на фиг. 10) по зависимости
ΔR=R'x-Rx3 и далее 
где Сэ - эквивалентная жесткость пружинного элемента 3 (на фиг. 7).
При этом h - является отклонением между регулируемой величиной Rx3 и входной R'x. Звено 1 в ООС (фиг. 10), задача которого устранить продольные колебания прицепа, описывается дифференциальным уравнением второго порядка:

где m - приведенная масса автомобиля и прицепа;
Δх=ха-xb; - величина текущего смещения при колебании (фиг. 7);
 - первая и вторая производные Δх;
- первая и вторая производные Δх;
rо - коэффициент сопротивления гидравлического элемента 2 (фиг. 7).
Для устранения продольных колебаний прицепа коэффициент сопротивления r0 должен быть:
где ψ≥0,7 - коэффициент апериодичности.
САР предлагаемого технического решения обеспечивает высокую точность регулирования тормозных сил прицепа, быстродействие тормозного привода и запас устойчивости на всех режимах торможения автопоезда, что обеспечивает высокую активную безопасность автопоезда. По качеству работы предлагаемая тормозная система приближается к качеству современных ТС прицепа с общим тормозным (пневматическим) приводом автомобиля-тягача.
| название | год | авторы | номер документа |
|---|---|---|---|
| ИНЕРЦИОННЫЙ ТОРМОЗ ОДНООСНОГО ПРИЦЕПА С УСТРОЙСТВОМ СТАБИЛИЗАЦИИ ПРЯМОЛИНЕЙНОГО ДВИЖЕНИЯ | 2024 |
|
RU2829583C1 |
| Тормоз наката одноосного прицепа | 2023 |
|
RU2805422C1 |
| Тормоз наката с устройством стабилизации прямолинейного движения одноосного прицепа | 2024 |
|
RU2825212C1 |
| Тормозная система автопоезда | 1980 |
|
SU880828A1 |
| Гидровакуумный привод тормозов прицепа | 1989 |
|
SU1794719A1 |
| Тормоз наката с механизмом стабилизации движения одноосного прицепа | 2023 |
|
RU2820724C1 |
| ТОРМОЗ НАКАТА | 1991 |
|
RU2025342C1 |
| Тормоз наката | 1988 |
|
SU1614987A1 |
| Электрогидравлический привод инерционной тормозной системы | 1989 |
|
SU1664618A2 |
| Электрогидравлический привод тормоза наката | 1990 |
|
SU1740218A1 |
Изобретение относится к области машиностроения, в частности к тормозным системам прицепов. Тормоз прицепа, приводимый в действие от сигнала торможения тормозной системы автомобиля-тягача, магистраль тормозного привода которого не связана с магистралью тормозного привода прицепа, содержит блок управления тормозной системы, гидроаккумулятор, электроклапаны, накопительный бачок и привод тормозного механизма. Блок управления состоит из трех параллельно соединенных элементов: гидравлического золотникового распределителя, двухрежимного гидроэлемента и упругого устройства, размещенных в одном корпусе, который неподвижно закреплен на раме прицепа. Все штоки элементов жестко соединены между собой и через головку тягово-сцепного устройства соединены с автомобилем-тягачом. Двухрежимный элемент выполнен с функцией гидрозамка в тяговом режиме и демпфера продольных колебаний - в режиме торможения, упругое устройство выполнено с функцией упругой связи тягача и прицепа. Гидравлический золотниковый распределитель выполнен с функцией следящей системы, которая обеспечивает оптимальный тормозной режим прицепа. Три элемента совместно с элементами тормозного механизма и прицепа образуют замкнутую систему автоматического регулирования. Достигается повышение быстродействия тормозной системы. 1 з.п. ф-лы, 10 ил. 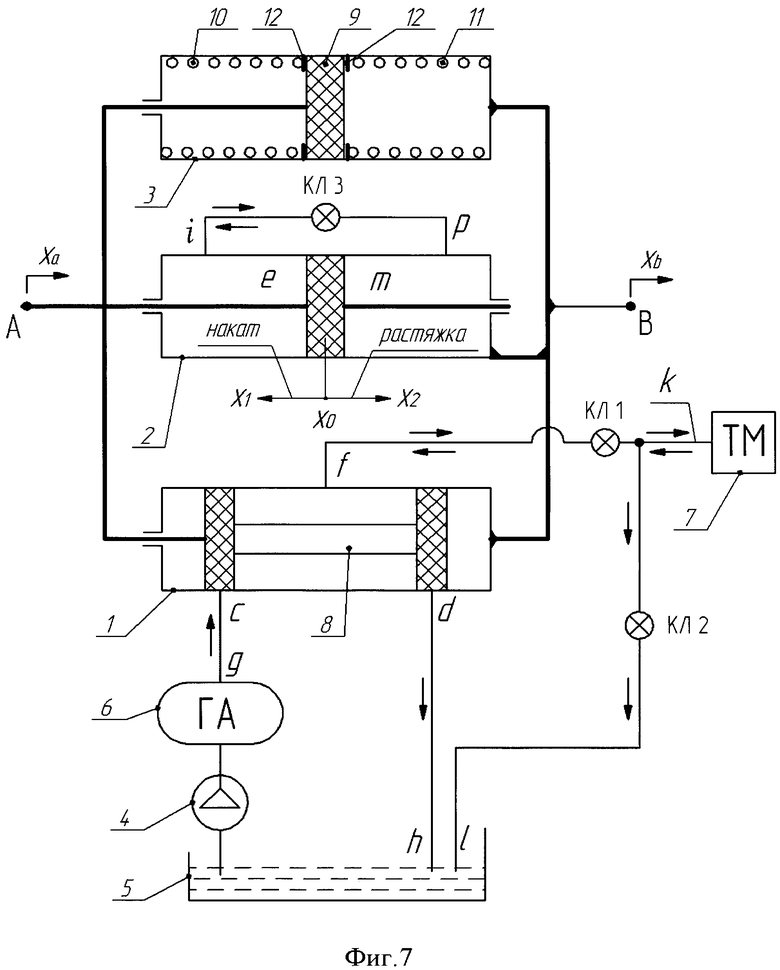
1. Тормоз прицепа, приводимый в действие от сигнала торможения тормозной системы автомобиля-тягача, магистраль тормозного привода которого не связана с магистралью тормозного привода прицепа, содержит блок управления тормозной системы, гидроаккумулятор, электроклапаны, накопительный бачок и привод тормозного механизма, отличающийся тем, что блок управления состоит из трех параллельно соединенных элементов: гидравлического золотникового распределителя, двухрежимного гидроэлемента и упругого устройства, размещенных в одном корпусе, который неподвижно закреплен на раме прицепа, а все штоки элементов жестко соединены между собой и через головку тягово-сцепного устройства (ТСУ) соединены с автомобилем-тягачом, при этом двухрежимный элемент выполнен с функцией гидрозамка в тяговом режиме и демпфера продольных колебаний - в режиме торможения, упругое устройство выполнено с функцией упругой связи тягача и прицепа, а гидравлический золотниковый распределитель выполнен с функцией следящей системы, которая обеспечивает оптимальный тормозной режим прицепа, к тому же упомянутые три элемента совместно с элементами тормозного механизма (ТМ) и прицепа (ОР) образуют замкнутую систему автоматического регулирования (САР), работающую по отклонению, с демпфирующим элементом в обратной отрицательной связи, а также, в прямой ветви САР, усилителем на основе гидравлического золотникового распределителя, играющего роль П-регулятора, тормозного механизма (ТМ), прицепа (ОР) и элемента сравнения на входе САР в виде упругого устройства.
2. Тормоз прицепа по п. 1, отличающийся тем, что содержит электронасос, обеспечивающий энергией торможение прицепа, с возможностью включения электронасоса от сигнала ближнего и/или дальнего света.
| Двухпроводный кран управления тормозами прицепа | 1985 |
|
SU1318459A1 |
| Тормозная система автопоезда | 1987 |
|
SU1497084A1 |
| Пневматический привод тормозов автопоезда | 1982 |
|
SU1024326A1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ТОРМОЗНЫХ СИЛ НА КОЛЕСАХ ТРАНСПОРТНОГО СРЕДСТВА | 1991 |
|
RU2028227C1 |
| US 6698552 B2, 02.03.2004. | |||

