ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Настоящая группа изобретений относится к беспроводной радиосвязи, в частности к устройствам и к способам для определения местоположения (локации) радиоузла относительно местоположения радиоузлов с заранее известным местоположением (далее - «РЗИМ»).
УРОВЕНЬ ТЕХНИКИ
Известны спутниковые системы глобальной навигации (GNSS), например GPS и ГЛОНАСС. Принцип расчета локации основан на измерении задержки распространения короткого радиоимпульса от посылки его РЗИМ (то есть -спутником) до приема его радиоузлом. Зная время распространения сигнала (далее -«TOF», от англ. «Time of Flight»), можно рассчитать расстояние между ними. Для определения трехмерного положения мобильного объекта в идеальном случае необходимо 4 РЗИМ. Недостаток спутниковых систем глобальной навигации состоит в том, что сигналы спутников настолько слабы, что невозможно точное определение координат в помещениях, следовательно, такие системы нельзя использовать для стороннего контроля перемещений радиоузла.
Известны способы навигации, в которых для увеличения точности систем глобальной спутниковой навигации используют дополнительные наземные РЗИМ (Assisted GPS (A-GPS), см. Goran M. et al. «Geolocation and Assisted GPS», Computer, 2001, 2:123-5). Это позволяет частично устранить проблему локации радиоузлов, расположенных внутри помещений.
Общий недостаток всех систем глобального позиционирования состоит в высокой стоимости оборудования, обеспечивающего точную синхронизацию всех РЗИМ по времени.
Известны способы локации радиоузлов посредством наземных РЗИМ, не требующие точной синхронизации РЗИМ по времени. В частности, большой популярностью в настоящее время пользуются способы, основанные на измерении мощности входного сигнала (сокращенно - «RSSI», от англ. «Receive Signal Strength Indication», см., например, статью Zhang Jianwu, Zhang Lu «Research on distance measurement based on RSSI of ZigBee» Computing, Communication, Control, and Management, 2009, 3(8-9):210-2).
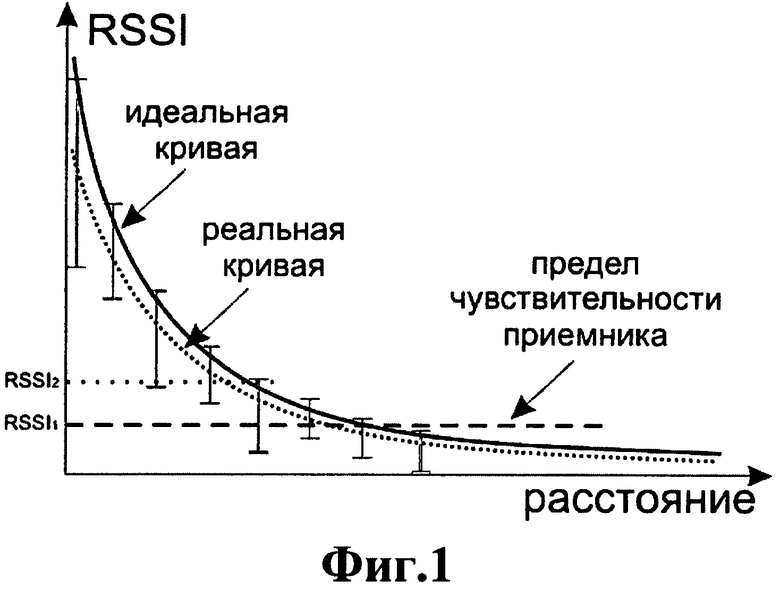
Недостатки способов, основанных на измерении RSSI, связаны с тем, что на измеренную мощность входного сигнала сильно влияют условия распространения и способ детектирования радиоволн, в частности анизотропия антенн по направлению радиосигнала, наличие и характер радиопомех (не обязательно в том же частотном диапазоне), особенности рельефа местности, изменение взаимного расположения объектов в зоне локации в процессе измерений (особенно внутри помещений), колебания напряжения питания, изменение атмосферных условий в процессе измерений, покачивания антенн и т.д. (см. статью Eiman Einahrawy, Xiaoyan Li, Richard P. Martin, «The Limits of Localization Using Signal Strength: A Comparative Study» IEEE SECON, October 2004) Действие этих факторов выражается в непредсказуемых флуктуациях мощности радиосигнала (см. там же). Типичная кривая зависимости измеренного RSSI от истинного кратчайшего расстояния между радиоузлами обозначена на фиг.1 линией из точек, которая, как видно, располагается выше уровня RSSI1, соответствующего пределу чувствительности РЗИМ (вертикальными линиями обозначены доверительные интервалы). Как следует из фиг.1, даже по точному, мгновенному значению мощности радиосигнала (например, по уровню RSSI2), невозможно точно определить расстояние между радиоузлами. Этот недостаток усугубляется еще и тем, что современное оборудование характеризуется грубой дискретизацией измерений и узким динамическим диапазоном и не позволяет с желаемой точностью измерять мощность радиосигнала.
Известны способы локации радиоузла посредством наземных РЗИМ, не требующие их точной синхронизации по времени, основанные на точном измерении времени распространения радиосигнала между, по меньшей мере, тремя наземными РЗИМ и радиоузлом (Time of Flight, сокращенно - TOF).
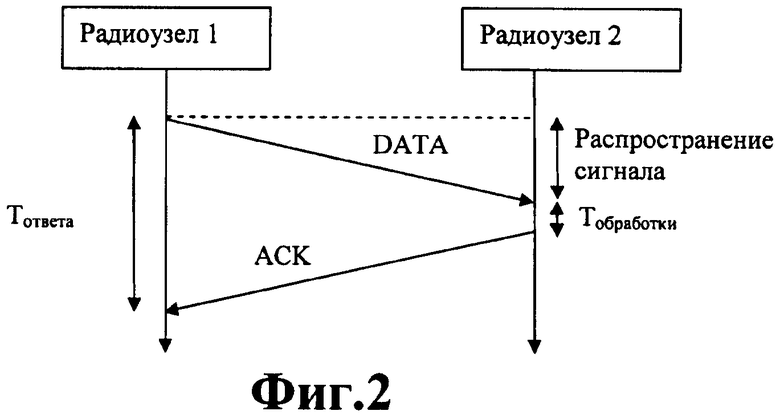
В частности, широко известен способ измерения расстояний методом RTT (от англ. «Roundtrip Time»), в котором измеряют TOF при распространении радиосигнала от одного радиоузла к другому и в обратном направлении (см. статью Гоголев А., Екимов Д., Екимов К., Мощевикин А., Федоров А., Цыкунов И. «Точность определения расстояний с помощью технологии nanoLoc» Беспроводные технологии, 2008, 2:48-51). Для этого, как показано на фиг.2, радиоузел 1 передает радиоузлу 2 первый радиосигнал, содержащий запрос на измерение (пакет «DATA»), и фиксирует время передачи; после приема первого радиосигнала радиоузел 2 немедленно передает радиоузлу 1 второй радиосигнал (пакет «АСК») и, наконец, радиоузел 1 фиксирует время приема второго радиосигнала. Считая время обработки сигналов обоими радиоузлами одинаковым, время распространения сигнала tp обычно вычисляют по формуле
tp=(Tответа-Tобработки)/2,
где Тответа - время, измеренное радиоузлом 1, с момента передачи первого радиосигнала до момента приема второго радиосигнала, Тобработки - время, измеренное радиоузлом 2 с момента приема первого радиосигнала до момента передачи второго радиосигнала. Расстояние между радиоузлами вычисляют по известной скорости распространения радиосигнала.
Недостаток этого способа состоит в том, что точность измерений снижается в связи с невозможностью компенсации разности скорости хода часов (clock drift) в упомянутых радиоузлах (см. вышеупомянутую статью Гоголев А.).
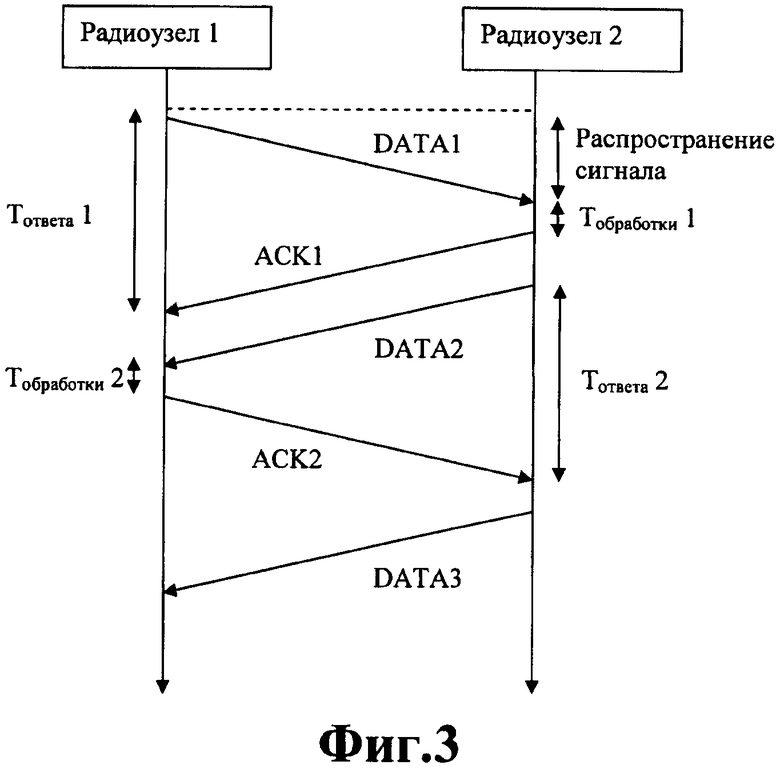
Для устранения этого недостатка в опубликованной заявке на патент США №2009/00253439 вышеупомянутый сеанс определения RTT проводят дважды, вначале, как показано на фиг.3, сеанс измерения инициирует радиоузел 1, а затем - радиоузел 2, после чего рассчитывают усредненное значение времени распространения сигнала. Такой способ получил название симметричного двухстороннего двухступенчатого измерения расстояний (SDS-TWR от англ. «Symmetric Double Sided Two Way Ranging», более подробно, см. вышеупомянутую статью Гоголев А. и др.).
Хотя точность способов, использующих TOF (RTT, TWR, SDS-TWR), не зависит от факторов, вызывающих вышеупомянутые флуктуации мощности радиосигнала, их недостаток состоит в том, что вследствие непрямолинейности распространения радиосигнала (например, из-за переотражений от стен или от поверхности земли) измеренные расстояния всегда выше кратчайших расстояний между РЗИМ и радиоузлом.
В других способах локации радиоузла посредством наземных РЗИМ, не требующих точной синхронизации РЗИМ по времени, посредством RSSI и/или TOF измеряют расстояние между радиоузлом и, по меньшей мере, одной РЗИМ и одновременно определяют направление радиосигнала от радиоузла (АОА, от англ. «Angle of Arrival» и DoA от англ. «Direction of Arrival»):
В частности, известен способ локации радиоузла, в котором посредством TOF измеряют расстояние между радиоузлом и РЗИМ, а посредством АоА - направление приема радиосигнала РЗИМ (патент США №5719584). Недостаток этого способа состоит в недостаточной точности существующего оборудования для измерения АоА.
Завышение измеренных расстояний между радиоузлами является общим недостатком способов, основанных на TOF и RSSI, с той лишь разницей, что значения TOF в принципе не могут быть меньше кратчайшего расстояния между радиоузлами, тогда как мгновенные значения RSSI могут отличаться от истинных как в большую, так и в меньшую сторону, а точность вычислений расстояний не улучшается по мере накопления мгновенных значений мощности (см. статью Elnahrawy E., Xiaoyan Li, Martin R.P. «The limits of localization using signal strength: a comparative study». Sensor and Ad Hoc Communications and Networks, 2004, ISBN: 0-7803-8796-1).
Существуют различные способы улучшения точности локации в условиях непрямолинейного распространения радиосигнала.
Для улучшения точности локации в первой группе способов расстояния измеряют многократно, а полученные серии измерений обрабатывают статистическими методами.
Известен способ локации радиоузла, в котором точность повышают фильтрацией явно завышенных измерений посредством гистограмм; дополнительно результаты могут улучшать методом наименьших квадратов с весовыми коэффициентами, заданными в предположении, что радиоузел равномерно движется (патент США №7383053). Недостаток этого способа, препятствующий достижению нижеупомянутого технического результата, состоит в том, что в нем требуется высокая частота измерений для каждого из расстояний (примерно 1000 Гц), что перегружает радиоэфир и приводит к высокому энергопотреблению радиоузла. Такая система не пригодна для одновременной локации большого числа радиоузлов в течение длительного интервала времени без подзарядки.
Известны способы локации радиоузла, в которых для фильтрации завышенных измерений используют эмпирическую функцию плотности вероятности, полученную на основе предварительно проведенных экспериментов (заявки №2092364 и 1605725 на европейский патент). Недостаток этих систем, препятствующий достижению нижеупомянутого технического результата, состоит в том, что они требуют длительной и трудоемкой предварительной калибровки.
Для улучшения точности локаций во второй группе способов частично компенсируют недостатки, присущие каждому из методов RSSI и TOF в отдельности, путем их комбинирования.
Известен способ локации радиоузла, в котором посредством RSSI проверяют нахождение радиоузла в зоне прямой видимости РЗИМ, и если радиоузел находится в прямой видимости, то расстояние от радиоузла до РЗИМ измеряют посредством TOF (заявка на европейский патент №1469685). Недостаток этого способа, препятствующий достижению нижеупомянутого технического результата, связан с тем, что вследствие флуктуаций мощности сильный сигнал не всегда означает, что радиоузел действительно находится в зоне прямой видимости РЗИМ. Еще один недостаток, препятствующий достижению нижеупомянутого технического результата, связан с тем, что измерение расстояний в условиях прямой видимости методом TOF не исключает завышения результатов вследствие отражения радиосигнала. Например, при нахождении радиоузла внутри комнаты, даже в условиях прямой видимости измеренные расстояния могут быть выше вследствие отражения радиосигнала от стен.
Известны способы локации радиоузла, в которых скомбинированы подходы RSSI и TOF, а влияние непрямолинейности распространения радиосигнала на точность измерений компенсируют посредством заранее построенных карт силы сигнала (заявка на европейский патент №2092364 и публикация международной заявки № WO/2007/129939 A1). Недостаток этих способов, препятствующий достижению нижеупомянутого технического результата, состоит в том, что в них не учитываются флуктуации мощности, обусловленные изменением взаимного расположения объектов в зоне локации. Еще один недостаток этих способов, препятствующий достижению нижеупомянутого технического результата, состоит в трудоемкости построения карт. Для улучшения точности локаций в третьей группе способов значения TOF и/или RSSI обрабатывают с учетом информации о движении объекта.
Известен способ локации радиоузла, в котором его начальное местоположение определяют посредством RSSI, а расстояние, на которое переместился радиоузел из начального местоположения, - с учетом данных о его ускорении вдоль нескольких осей (международная публикация №WO/2007/129939 A1).
Известен способ локации радиоузла, в котором серии измерений RSSI подвергают усреднению только в том случае, если в процессе измерения радиоузел был неподвижен (патент США №7042391). Недостаток этого способа, препятствующий достижению нижеупомянутого технического результата, состоит в том, что на результаты усреднения небольшого числа серийных измерений сильно влияют флуктуации.
Общий недостаток вышеупомянутых способов из третьей группы, препятствующий достижению нижеупомянутого технического результата, состоит в том, что при вибрациях, а равно и при равномерном прямолинейном движении радиоузла использование информации об ускорении влечет грубые ошибки локации.
Таким образом, известные способы не обеспечивают локацию радиоузла с точностью от 1 до 3 метров в условиях сильного экранирования радиосигнала, в условиях непрямолинейного распространения радиосигнала, и/или при изменяющемся взаимном расположении предметов в зоне локации.
РАСКРЫТИЕ ИЗОБРЕТЕНИЯ
В заявленной группе изобретений решается задача повышения точности локации радиоузла по времени распространения радиосигнала между радиоузлом и радиоузлами с заранее известными местоположениями в условиях непрямолинейного распространения радиосигнала, и/или при изменяющемся взаимном расположении предметов в зоне локации (то есть - повышение помехоустойчивости).
Одновременно и дополнительно решается задача повышения скорости уточнения локаций, что позволяет сократить длительность измерительного периода.
Одновременно и дополнительно решается задача точной локации радиоузлов, разнородных по используемому способу определения движения.
Поставленные задачи решены благодаря тому, что в способе локации радиоузла посредством измерения расстояний между упомянутым радиоузлом и радиоузлами с заранее известными местоположениями (РЗИМ) по времени распространения радиосигнала между ними (TOF)
измеряют параметры движения упомянутого радиоузла,
измеряют мощность радиосигнала от упомянутого радиоузла,
вычисляют перемещение радиоузла с предварительно заданной предельной скоростью за период времени между локациями,
вычисляют точность локации по зависимости от размеров области перекрытия окружностей с центрами в упомянутых РЗИМ и радиусами, равными измеренным расстояниям между ними и упомянутым радиоузлом,
сравнивают упомянутые параметры движения и изменения мощности радиосигнала с предварительно заданными пороговыми значениями, а упомянутое перемещение - с упомянутой точностью локации и
вычисляют локацию с учетом минимальных расстояний, измеренных за весь период неподвижности, в течение которого упомянутые параметры движения и изменение упомянутой мощности меньше упомянутых пороговых значений, а упомянутое перемещение меньше упомянутой точности локаций.
Неожиданно было установлено, что при использовании информации об ускорении радиоузла совместно с информацией об изменении мощности радиосигнала можно распознавать прямолинейное движение радиоузла и движение радиоузла с ускорениями и/или скоростями ниже предварительно заданного порогового значения. Это позволило преодолеть недостатки способа локации, известного из вышеупомянутого патента США №7042391. Еще одно отличие заявленного способа состоит в том, что на точность локации не влияют флуктуации мощности радиосигнала, так как вместо измерения RSSI локацию определяют по времени распространения радиосигнала. В результате можно использовать не абсолютные значения RSSI, а лишь изменение силы входного сигнала.
Совместное измерение ускорения и мощности сигнала позволяет получать точные локации даже для узлов, не укомплектованных средствами измерения скорости или перемещения. Это также позволяет применять систему для локации разнородных радиостанций, одна часть из которых может быть укомплектована только средствами измерения ускорения (например, акселерометрами), а другая часть - только средствами для измерения скорости и/или перемещения (например, спидометрами, тахометрами, одометрами и/или датчиками сдвига частоты).
Но главное, неожиданно было установлено, что если при вычислении локаций использовать только минимальное по своему абсолютному значению опорное расстояние от РЗИМ до неподвижного радиоузла из всей последовательности значений в серии, то при прочих равных условиях требуется в несколько раз меньше времени для достижения требуемого доверительного интервала локации, чем при измерении мощности радиосигнала. Это позволяет уменьшить частоту измерений, снизить энергопотребление, сэкономить радиоэфир и увеличить точность записи траектории движущегося объекта по сравнению со способом локации, известным из вышеупомянутого патента США №7042391.
Если R+dR1, R+dR2,…, R+dRn представляет собой серию из N измеренных опорных расстояний между радиоузлом и РЗИМ, где R представляет собой истинное значение расстояния, a dRi - ошибку i-го измерения, a dRm - минимальная ошибка, то для усредненного значения в патенте США №7042391 получаем:
Rcp=(R+dR1+R+dR2+…+R+dRn)/N=R+(dR1+dR2+…+dRn)/N.
В заявленном способе выбирают минимальное значение измеренного расстояния от РЗИМ до неподвижной радиостанции, а значит минимальную ошибку dRm. Поэтому расстояние между неподвижным радиоузлом и РЗИМ, определенное за N измерений, соответствует формуле
R+dRm
Очевидно, что:
R+(dR1+dR2+…+dRn)/N>R+dRm
Таким образом, заявленный способ преодолевает принципиальные ограничения точности, присущие способам, основанным на статистической обработке информации о мощности радиосигнала и об ускорении радиоузла, так как для локации радиоузла на основе N измеренных опорных расстояний от радиоузла до РЗИМ вместо усреднения всех данных, каждое из которых содержит ошибку, выбирают единственное наиболее точное измерение из всех N измерений.
Должно быть понятно, что средства измерения мощности радиосигнала можно размещать в радиоузле или в РЗИМ. Причем, когда средства измерения мощности размещены в радиоузле, то параметры мощности радиосигнала передаются в узел обработки данных посредством беспроводного телекоммуникационного канала связи.
Аппаратное оформление и размещение средств измерения параметров движения зависит от их вида. Так, если для определения параметров движения применяют магнетометр, акселерометр с инерционной массой, спидометр, одометр или тахометр, то эти средства должны быть выполнены таким образом, чтобы радиоузел перемещался вместе с ними. Если измерение параметров движения (например, скорости и/или ускорения) осуществляют по доплеровскому смещению, то предпочтительно размещают датчик разности частот в РЗИМ. Если же датчик разности частот размещен в радиоузле, то параметры смещения частоты передают в узел обработки посредством беспроводного телекоммуникационного канала.
Радиоузел может быть дополнительно снабжен средствами контроля перемещения и/или направления движения, такими как магнетометр (в частности, магнитный компас), акселерометр с возможностью измерения ускорений вдоль нескольких осей, гироскоп и одометр. Эти средства позволяют отслеживать траекторию перемещения объекта из точки с известным местоположением, что может быть использовано для сокращения количества измерений в заявленном способе и для экономии радиоэфира.
Должно быть понятно, что для реализации способа необходимо, чтобы параметры расстояния между РЗИМ и определенным радиоузлом (например, времена распространения радиосигнала между РЗИМ и радиоузлом или расстояние в метрах), параметры мощности радиосигнала (например, абсолютное значение мощности, либо ее изменение в заданный период времени), а также параметры движения транслировались в единую информационную среду и совместно учитывались при вычислении локации и точности локации. Это может быть достигнуто, в частности, посредством трансляции данных в цифровой форме в телекоммуникационных каналах проводных и/или беспроводных сетей. В целях синхронизации радиоузлы могут считывать каждый вид вышеупомянутых данных с одинаковой периодичностью, либо с разной периодичностью, но тогда для последующей обработки данные снабжаются метками, позволяющими совместить их по времени.
Обработка результатов измерений может осуществляться различными компонентами системы - в самих радиоузлах, в РЗИМ, либо на специализированном оборудовании.
Для измерения расстояния между радиоузлом и РЗИМ пригодны различные модификации метода TOF.
В частном варианте осуществления расстояние между радиоузлом и РЗИМ измеряют по методу симметричного двухстороннего двухступенчатого измерения расстояний (SDS-TWR).
В одном частном варианте осуществления расстояние между радиоузлом и РЗИМ измеряют по методу RTT.
В еще одном частном варианте осуществления используют радиоузлы, локация которых осуществлена ранее. Это может позволить получать локации объектов даже в тех случаях, когда радиоузел находится вне зоны покрытия, обеспечиваемой стационарными РЗИМ, а также в тех случаях, когда точность измерений между радиоузлами, положение одного из которых определено ранее, выше точности измерений между радиоузлом и стационарными РЗИМ.
В зависимости от имеющихся данных об ограничениях подвижности радиоузла, для точной локации может потребоваться различное количество РЗИМ.
В частном варианте осуществления измеряют расстояние, по меньшей мере, до одной РЗИМ. Точную локацию в этом случае определяют с учетом данных о траектории, от которой радиоузел не может отклоняться в силу каких-то ограничений. В частности, если известно, что радиоузел движется по железнодорожным путям или по заранее известному пути, то его местоположение может однозначным образом быть определено по измеренному расстоянию до единственной РЗИМ.
В частном варианте осуществления измеряют расстояние, по меньшей мере, до трех РЗИМ, расположенных на расстоянии друг от друга. Это позволяет определять локацию радиоузла известными методами триангуляции.
Точность локации зависит от размеров и/или площади области перекрытия окружностей с центрами в РЗИМ и радиусами, равными измеренным расстояниям. При этом, чем больше РЗИМ используют для локации, тем, как правило, меньше площадь этой фигуры и, следовательно, выше точность. Однако для экономии радиоэфира желательно минимизировать количество РЗИМ, необходимых для достижения желаемой точности локации. Для достижения баланса между точностью локации и загрузкой радиоэфира стремятся достигнуть заданной точности локации посредством использования минимального количества РЗИМ.
В частном варианте осуществления при упомянутой точности локации ниже предварительно заданной величины измеряют расстояния между упомянутым радиоузлом и дополнительными РЗИМ.
В другом частном варианте осуществления используют такое количество РЗИМ, которое достаточно для достижения предварительно заданной точности локации.
Для выбора дополнительных РЗИМ могут быть пригодны разные критерии. Как правило, вероятность, что РЗИМ поможет улучшить точность локации тем выше, чем меньше расстояние между ним и радиоузлом.
В частном варианте осуществления используемые РЗИМ выбирают с учетом мощности радиосигнала от упомянутого радиоузла.
Альтернативно или дополнительно проводят измерения расстояний до всех или нескольких дополнительных РЗИМ, в зоне покрытия которых находится радиоузел, и упорядочивают дополнительные РЗИМ по силе их влияния на точность локации, а затем последовательно подключают дополнительные РЗИМ в порядке уменьшения силы их влияния на точность локации.
В частном варианте осуществления используемые РЗИМ выбирают путем сравнения силы влияния РЗИМ на точность локации упомянутого радиоузла.
Локацию радиоузла вычисляют с учетом расстояния между радиоузлом и РЗИМ по различным алгоритмам.
В частном варианте осуществления в качестве локации вычисляют геометрическое место внутренней точки области перекрытия окружностей с центрами в упомянутых РЗИМ и радиусами, равными измеренным расстояниям между ними и упомянутым радиоузлом.
В одном частном варианте осуществления в качестве локации вычисляют геометрическое место внутренней точки, равноудаленной от границ упомянутой области.
В еще одном частном варианте осуществления в качестве локации вычисляют геометрическое место внутренней точки, являющейся условным центром массы упомянутой области.
В другом частном варианте осуществления упомянутую область строят с учетом расстояний, предварительно скорректированных в зависимости от силы сигнала. Это позволяет дополнительно использовать преимущества RSSI измерений в тех случаях, когда они не расходятся с результатами измерений методом TOF.
Точность измерений можно дополнительно улучшить, если исключить из упомянутых областей перекрытия такие области, в которых радиоузел заведомо не может находиться, например, крутые горные склоны, огороженные территории, либо участки местности, расположенные вдали от дорог для радиоузлов, движущихся по автомобильным или железнодорожным путям, либо закрытые для доступа части зданий.
Таким образом, в одном из частных вариантов осуществления до вычисления локации из упомянутой области перекрытия окружностей исключают предварительно заданные области, в которых радиоузел не может находиться.
Для определения перемещения радиостанций пригодны средства различного рода.
В частном варианте осуществления измерение упомянутого параметра движения радиоузла осуществляют посредством магнетометра, акселерометра, одометра, тахометра и/или спидометра.
В одном из предпочтительных вариантов осуществления измерение упомянутого параметра движения радиоузла осуществляют по допплеровскому сдвигу частоты радиосигнала.
Для уменьшения количества РЗИМ, необходимого для локации с заданной точностью, можно использовать информацию о направлении распространения радиосигнала, например информацию о разности фаз радиосигнала, приходящего на расположенные вблизи друг от друга антенны.
Таким образом, в одном из частных вариантов осуществления дополнительно измеряют разность фаз радиосигнала от радиоузла для определения направления его распространения.
Для измерения расстояний между радиоузлом и РЗИМ, для определения мощности радиосигнала и для передачи информации можно использовать либо разные одночастотные и многочастотные радиосигналы, либо единый одночастотный или многочастотный радиосигнал.
Наибольшая экономия радиоэфира достигается, когда при измерении расстояния и мощности используют единый радиосигнал. Еще большая экономия радиоэфира достигается, когда при измерении расстояния, мощности и при передаче информации используют единый радиосигнал.
Для реализации вышеописанного способа пригодны различные автоматизированные системы, включающие радиоузлы с известным местоположением и радиоузлы, местоположение которых необходимо определить, а также телекоммуникационные средства, необходимые для трансляции результатов измерений и вычислений в единую информационную среду, и средства аналоговой и/или цифровой обработки результатов измерений.
Еще одним объектом заявленной группы изобретений является система локации радиоузла, в которой поставленная выше задача повышения точности локации решается благодаря тому, что она содержит в себе:
радиоузлы с заранее известным местоположением (РЗИМ),
измеритель времени (ИВ) распространения радиосигнала между РЗИМ и упомянутым радиоузлом по времени распространения радиосигнала между ними,
вычислитель расстояний (ВР) между РЗИМ и упомянутым радиоузлом, подключенный к упомянутому ИВ,
вычислитель локаций (ВЛ) упомянутого радиоузла с учетом расстояний между РЗИМ и упомянутым радиоузлом,
вычислитель точности (ВТ) локаций упомянутого радиоузла в зависимости от размеров области перекрытия окружностей с центрами в РЗИМ и радиусами, равными расстояниям между ним и РЗИМ,
вычислитель перемещения (ВП) упомянутого радиоузла с предварительно заданной предельной скоростью за период времени между последовательными локациями,
измеритель параметров движения упомянутого радиоузла (ИПДР),
измеритель параметров мощности (ИМ) радиосигналов от упомянутого радиоузла,
первый компаратор (ПК), подключенный к ИПДР и выполненный с возможностью сравнения изменений входного значения с предварительно заданным пороговым значением,
второй компаратор (ВК), подключенный к ИМ и выполненный с возможностью сравнения входного значения с предварительно заданным пороговым значением,
третий компаратор (ТК), подключенный к ВП и ВТ и выполненный с возможностью сравнения входных значений между собой,
запоминающее устройство (ЗУ),
четвертый компаратор (ЧК), подключенный к ВР и выполненный с возможностью сравнения входного значения и значения в ЗУ,
первый логический вычислитель (ПЛВ), выполненный с возможностью вычисления булевой функции «ИЛИ-НЕ»,
второй логический вычислитель (ВЛВ), выполненный с возможностью вычисления булевой функции «И»,
записывающий блок (ЗБ), выполненный с возможностью записи расстояний между РЗИМ и упомянутым радиоузлом в ЗУ,
в которой
выходы ПК, ВК и ТК подключены к входу ПЛВ, выход ПЛВ и выход ЧК подключены к входу ВЛВ, а выход ВЛВ подключен к ЗБ.
Система может быть дополнительно снабжена средствами контроля и улучшения точности локаций.
В частном варианте воплощения система дополнительно содержит пятый компаратор (5К), выполненный с возможностью сравнения упомянутой точности локации с предварительно заданным пороговым значением, и шестой компаратор (ШК), выполненный с возможностью сравнения влияний упомянутых РЗИМ на упомянутую точность локации, и блок управления (БУ), выполненный с возможностью активации такого количества РЗИМ, которое необходимо для достижения точности локации вышеупомянутого порогового значения.
Функциональные элементы системы могут быть выполнены из известных элементов, соединенных между собой по известным правилам. Пригодны любые универсальные или специализированные аналоговые и/или цифровые процессоры, контроллеры, микроконтроллеры и/или реконфигурируемые системы.
В частном варианте воплощения, по меньшей мере, два из ВЛ, ВР, ВТ, ВП, ПЛВ, ВЛВ, ПК, ВК, ТК, ЧК, ЗБ, 5К, ШК и БУ скомпонованы в одной интегральной схеме. В этом случае упомянутые элементы могут быть реализованы на базе известных операционных усилителей, резисторов и конденсаторов, соединенных между собой по известным правилам.
Функциональные элементы упомянутой системы могут быть реализованы в виде аппаратных или программно-аппаратных средств, содержащих в аппаратной части известные универсальные процессоры (например, с RISC, MISC или CISC архитектурой), ASIC-процессоры, DSP-процессоры, программируемые логические интегральные схемы (ПЛИС) и/или электронные аналоговые вычислительные устройства.
В частном варианте воплощения, по меньшей мере, один из ВЛ, ВР, ВТ, ВП, ПЛВ, ВЛВ, ПК, ВК, ТК, ЧК, ЗБ, 5К, ШК и БУ выполнен на основе, по меньшей мере, одного универсального процессора, ASIC-процессора, DSP-процессора, программируемой логической интегральной схемы (ПЛИС) и/или электронного аналогового вычислительного устройства.
В случае, когда разные функциональные элементы или группы функциональных элементов системы размещаются вдали друг от друга, например часть элементов в РЗИМ, а остальные - в центральном сервере, необходимо транслировать результаты измерений и вычислений в единую информационную среду.
В частном варианте воплощения РЗИМ и ВЛ, ВР, ВТ, ВП, ПЛВ, ВЛВ, ПК, ВК, ТК, ЧК, ЗБ, 5К, ШК и БУ связаны между собой единой проводной и/или беспроводной сетью.
Для измерения параметра движения радиоузла пригодны различные средства.
В частном варианте воплощения ИПДР представляет собой магнетометр, акселерометр, одометр, тахометр и/или спидометр.
В еще одном частном варианте воплощения ИПДР выполнен на основе измерителей допплеровского смещения.
Еще одним объектом заявленной группы изобретений является узел обработки данных для реализации способа локации радиоузла, в котором поставленная выше задача повышения точности локации решается благодаря тому, что он содержит в себе:
телекоммуникационный интерфейс (ТИ) для приема параметров движения упомянутого радиоузла, параметров мощности радиосигнала от упомянутого радиоузла и параметров расстояния между упомянутым радиоузлом и радиоузлом с заранее известным местоположением (РЗИМ),
вычислитель локаций (ВЛ) радиоузла с учетом параметров расстояния между ним и РЗИМ,
вычислитель расстояний (ВР),
вычислитель точности (ВТ) локаций упомянутого радиоузла в зависимости от размеров области перекрытия окружностей с центрами в РЗИМ и радиусами, равными расстояниям между ним и РЗИМ,
вычислитель перемещения (ВП) упомянутого радиоузла с предварительно заданной предельной скоростью за период времени между последовательными локациями,
первый компаратор (ПК), выполненный с возможностью сравнения упомянутых параметров движения с предварительно заданными пороговыми значениями,
второй компаратор (ВК), выполненный с возможностью сравнения изменения упомянутых параметров мощности радиосигнала с предварительно заданным пороговым значением,
третий компаратор (ТК), подключенный к ВП и ВТ и выполненный с возможностью сравнения входных значений между собой,
запоминающее устройство (ЗУ),
четвертый компаратор (ЧК), подключенный к ВР и выполненный с возможностью сравнения входного значения и значения в ЗУ,
первый логический вычислитель (ПЛВ), выполненный с возможностью вычисления булевой функции «ИЛИ-НЕ»,
второй логический вычислитель (ВЛВ), выполненный с возможностью вычисления булевой функции «И»,
записывающий блок (ЗБ), выполненный с возможностью записи параметров расстояний между РЗИМ и упомянутым радиоузлом в ЗУ,
в котором
выходы ПК, ВК и ТК подключены к входу ПЛВ, выход ПЛВ и выход ЧК подключены к входу ВЛВ, а выход ВЛВ подключен к ЗБ.
Аналогично тому, как описано применительно к вышеупомянутой системе, в частном варианте воплощения узла, по меньшей мере, два из ВЛ, ВР, ВТ, ВП, ПЛВ, ВЛВ, ПК, ВК, ТК, ЧК и ЗБ скомпонованы в одной интегральной схеме.
В еще одном частном варианте воплощения узла, по меньшей мере, один из ВЛ, ВР, ВТ, ВП, ПЛВ, ВЛВ, ПК, ВК, ТК, ЧК и ЗБ выполнен на основе, по меньшей мере, одного универсального процессора, ASIC-процессора, DSP-процессора, программируемой логической интегральной схемы (ПЛИС) и/или электронного аналогового вычислительного устройства.
В другом частном варианте воплощения узла РЗИМ и ВЛ, ВР, ВТ, ВП, ПЛВ, ВЛВ, ПК, ВК, ТК, ЧК и ЗБ связаны между собой единой проводной и/или беспроводной сетью.
Следует понимать, что объектам вышеописанной группы изобретений могут быть присущи все или только некоторые из признаков вышеупомянутых частных и предпочтительных вариантов осуществления или выполнения при условии, что они не исключают друг друга, и притом такие комбинации признаков также включены в настоящее раскрытие.
Среднему специалисту из описания аналогов и из уровня техники должны быть понятны функции и допустимые варианты выполнения, соединения и расположения вышеупомянутых функциональных элементов, например, должно быть понятно, что компаратор может быть реализован на основе операционных усилителей, либо на основе программно-аппаратного комплекса, например ЭВМ общего назначения, снабженной программными средствами, обеспечивающими сравнение данных.
Если какие-то конструктивные элементы и другие признаки, которые, как известно среднему специалисту, необходимы для реализации назначения заявленных изобретений, но специально не упомянуты в формуле изобретения и не раскрыты в описании, то они являются имманентно присущими, а их конкретные варианты выполнения хорошо известны из аналогов и из уровня техники.
Заявленная группа изобретений может быть использована для контроля местоположения (как в реальном времени, так и по восстанавливаемым данным) и перемещения персонала на производственной территории.
Для лучшего понимания идей изобретения ниже приводятся иллюстрирующие чертежи, показывающие некоторые частные варианты выполнения элементов изобретений или осуществления способа, наличие, расположение и связи основных элементов и некоторые детали реализации способов. Однако, несмотря на то, что в настоящем документе изобретение описывают со ссылкой на позиции элементов, показанных на чертежах, не следует приписывать их особенности соответствующим элементам, на которые ссылаются в тексте.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
На фиг.1 показан типичный график зависимости измерений мощности радиосигнала (RSSI) от истинного кратчайшего расстояния между РЗИМ и радиоузлом.
На фиг.2 и 3 показаны временные диаграммы, иллюстрирующие измерение расстояний методом RTT (TWR) (фиг.2) и методом SDS-TWR (фиг.3).
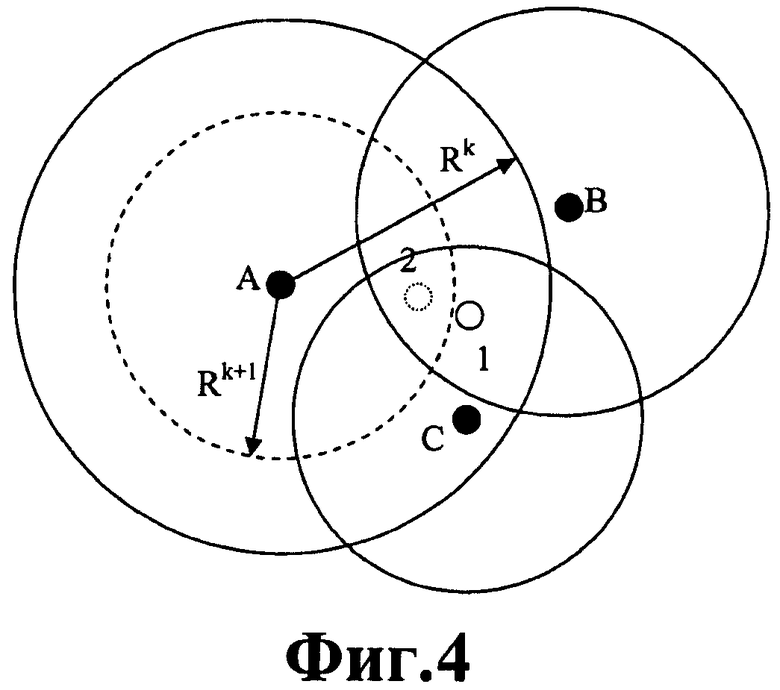
На фиг.4 показана схема, иллюстрирующая, как уточнение расстояния помогает улучшить результаты определения местоположения. Черными точками отмечены узлы, местонахождение которых заранее известно (А, В и С), окружностью с цифрой 1 - расчетное местонахождение мобильного узла после первого цикла измерений (внутри области перекрытия всех трех окружностей), окружностью с цифрой 2 -скорректированное местонахождение мобильного узла после корректировки радиуса от узла А (скорректированное значение радиуса показано пунктирной линией).
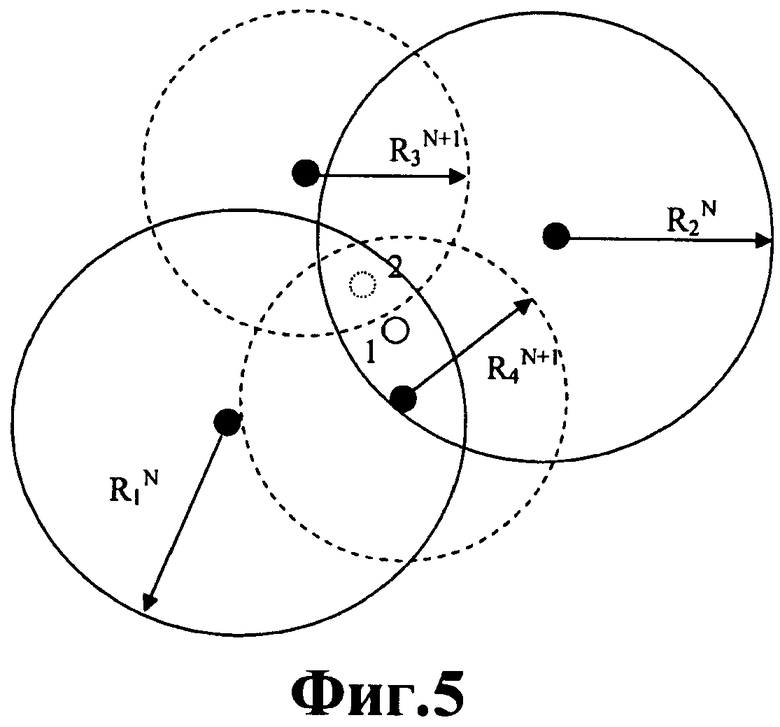
На фиг.5 показана схема, иллюстрирующая, как накопление данных помогает улучшить результаты определения местоположения неподвижного объекта.
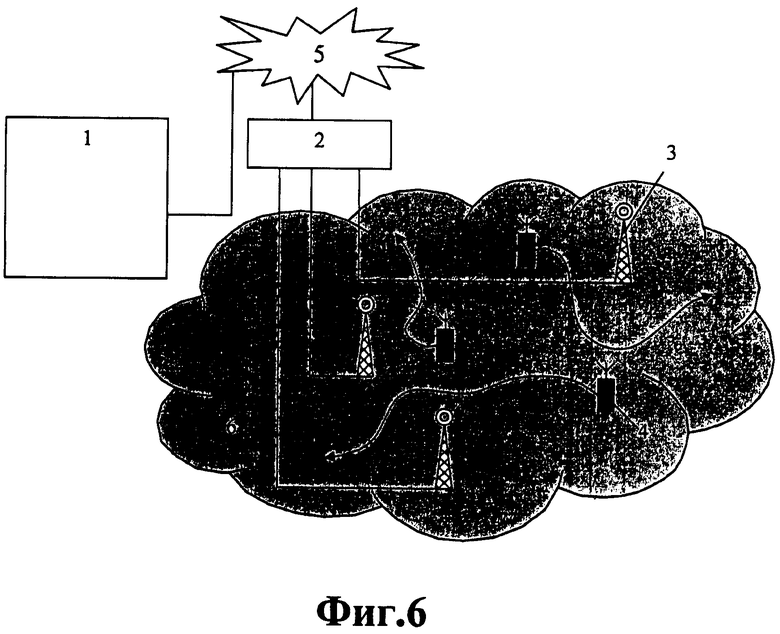
На фиг.6 схематично показан состав типичной системы для определения местоположения радиоузла. Позициями 1-6 обозначены следующие элементы: сервер управления, коммутации, сбора и обработки данных 1, коммутатор 2, РЗИМ 3, радиоузел 4, всемирная сеть Интернет 5 и зона покрытия РЗИМ 6.
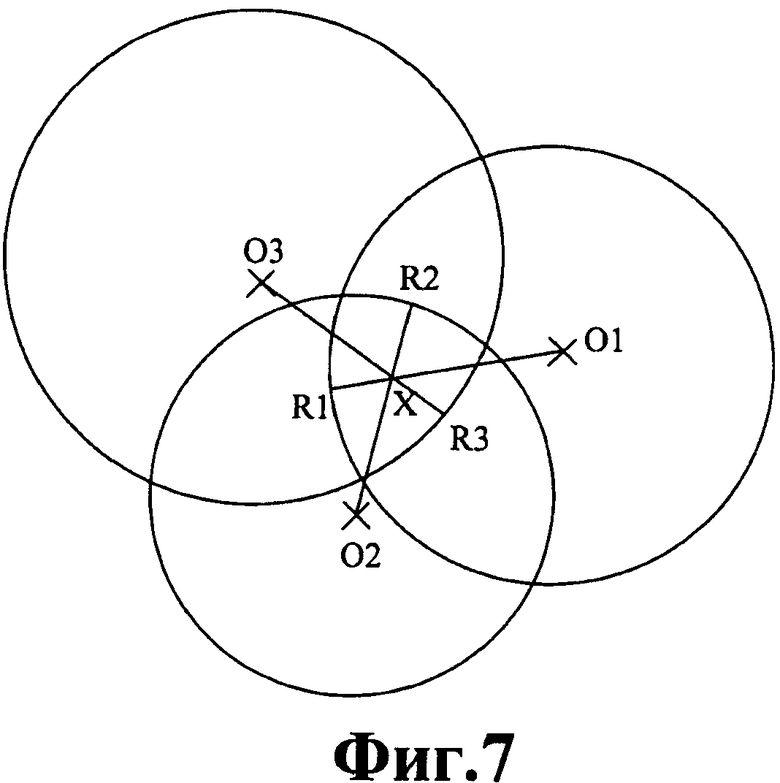
На фиг.7 показана схема, иллюстрирующая операцию определения точности локации.
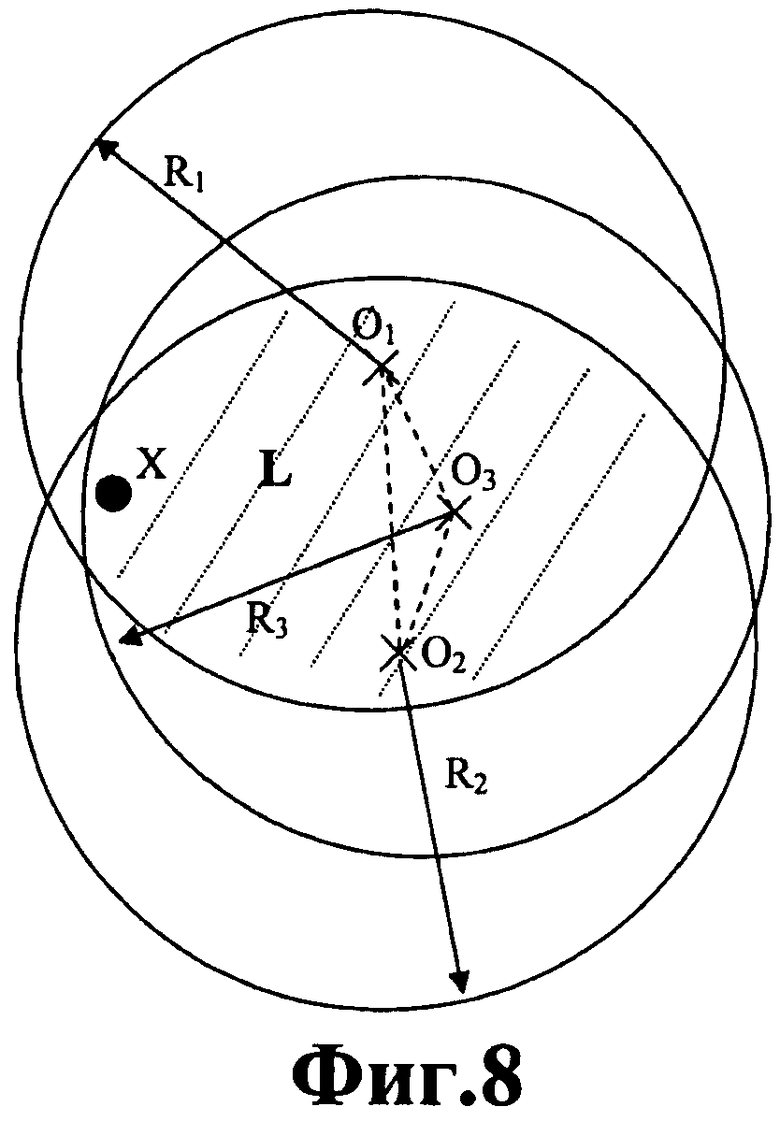
На фиг.8 показана схема, иллюстрирующая локацию, когда радиоузел находится вне многоугольника, образованного РЗИМ (O1, O2, O3), L - область локации ПР (область перекрытия окружностей); Х - положение объекта в области локации; O1,… -положение РЗИМ; R1,… - измеренные расстояния; dR1,… - средние завышения для каждого РЗИМ (определенные экспериментально).
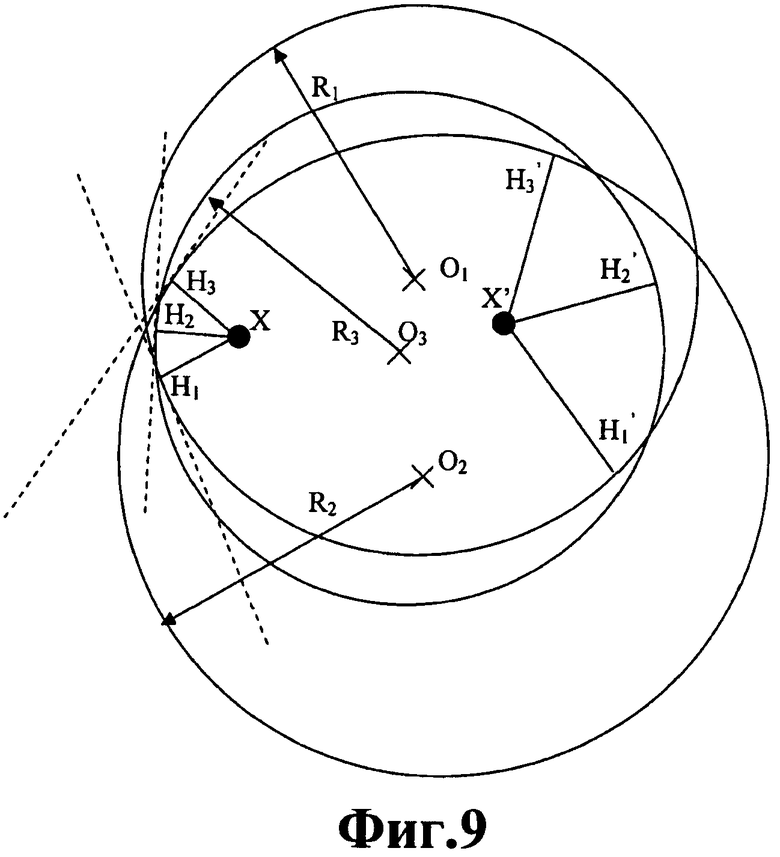
На фиг.9 показана схема, иллюстрирующая локацию с помощью вычисления геометрического места точки, равноудаленной от окружностей, предварительно скорректированных с учетом погрешности. Х - точка, равноудаленная от окружностей (локация объекта); X' - вторая равноудаленная точка (с большим расстоянием); XH1, ХН2, ХН3 - расстояния от окружностей O1, O2, O3 до точки Х (ХН1=ХН2=ХН3<ХН1'=ХН2'=XH3'); O1,… - положение РЗИМ; R1,… - измеренные расстояния;
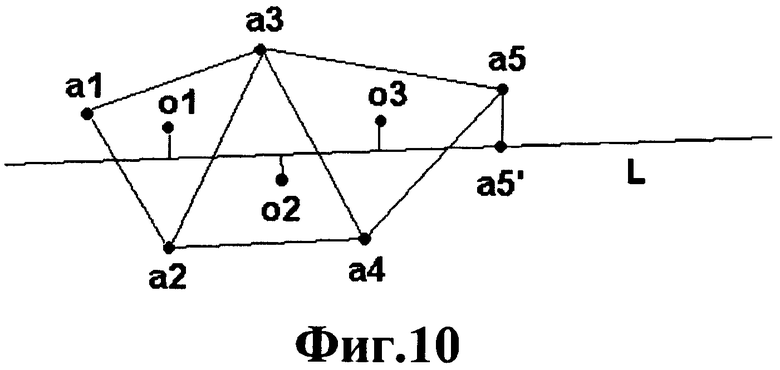
На фиг.10 показана схема, иллюстрирующая операцию сглаживания траектории радиоузла с помощью метода наименьших квадратов.
На фиг.11 показаны функциональные элементы и связи заявленной системы локации. Позициями 7-21 обозначены следующие элементы: измеритель параметров движения радиоузла (ИПДР) 7, измеритель мощности (ИМ) 8, вычислитель перемещения (ВП) 9, вычислитель точности (ВТ) 10, первый компаратор (ПК) 11, второй компаратор (ВК) 12, третий компаратор (ТК) 13, вычислитель расстояний (ВР) 14, измеритель времени (ИВ) 15, четвертый компаратор (ЧК) 16, первый логический вычислитель (ПЛВ) булевой функции «ИЛИ-НЕ» 17, второй логический вычислитель (ВЛВ) булевой функции «И» 18, запоминающее устройство (ЗУ) 19, вычислитель локаций (ВЛ) 20, записывающий блок (ЗБ) 21.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
Нижеследующее описание частных вариантов воплощения даются только для наглядной иллюстрации изобретательской идеи. Ничто в настоящем разделе описания не должно быть истолковано как ограничение объема притязаний. Должно быть понятно, что средний специалист, знакомый с идеями настоящего изобретения, может использовать его главные отличительные особенности и внести эквивалентные замены с достижением поставленной задачи и без отклонения от духа и области настоящего изобретения.
ПРИМЕР 1
Способ осуществляют следующим образом: в течение измерительного периода измеряют расстояния между радиоузлом и радиоузлами с заранее известными местоположениями (РЗИМ) по времени распространения радиосигнала между ними (например, по методу RTT, TWR и/или SDS-TWR),
одновременно с этим измеряют параметры движения упомянутого радиоузла (например, ускорение, скорость или перемещение),
одновременно с этим измеряют параметр мощности радиосигнала от упомянутого радиоузла (например, измеряют мощность радиосигнала, приходящего на РЗИМ, участвующие в измерении времени распространения радиосигнала),
после этого вычисляют перемещение радиоузла с предварительно заданной предельной скоростью за период считывания (за время между локациями),
вычисляют точность локации по зависимости от размеров области перекрытия окружностей с центрами в упомянутых РЗИМ и радиусами, равными измеренным расстояниям между ними и упомянутым радиоузлом (например, согласно примеру 5),
сравнивают упомянутые параметры движения и изменение упомянутой мощности (например, за период считывания) с предварительно заданными пороговыми значениями, а упомянутое перемещение - с упомянутой точностью локации (например, посредством системы, описанной в примере 2) и
вычисляют локацию упомянутого радиоузла с учетом минимальных расстояний, измеренных за весь период неподвижности, в течение которого упомянутые параметры движения и изменение упомянутых параметров мощности радиосигнала меньше упомянутых пороговых значений, а упомянутое перемещение меньше упомянутой точности локаций.
Улучшение точности локаций за счет выбора наименьших измерений за весь период неподвижности радиоузла показано в примере 3.
ПРИМЕР 2
Система локации радиоузла, как показано на фиг.11, работает следующим образом.
РЗИМ и радиоузлы посредством ИВ измеряют время распространения радиосигнала одним из методов TOF. По известному времени распространения сигнала вычисляют расстояние между радиоузлом и РЗИМ посредством ВР. Определяют размеры области перекрытия окружностей с центрами в РЗИМ и радиусами, равными вычисленным расстояниям и по предварительно заданной зависимости посредством ВТ вычисляют точность локации. Вычисляют возможную локацию радиоузла с учетом вычисленных расстояний посредством ВЛ. Посредством ВП вычисляют возможное перемещение радиоузла с учетом его предварительно заданной предельной скорости и длительности периода времени между последовательными локациями. Измеряют параметр движения объекта посредством ИПДР (например, посредством магнетометра, акселерометра, спидометра, одометра, тахометра). Посредством ИМ измеряют мощность радиосигналов от упомянутого радиоузла. Посредством ПК сравнивают параметр движения радиоузла с предварительно заданным пороговым значением. Посредством ВК сравнивают изменение мощности радиосигнала с предварительно заданным пороговым значением. Посредством ТК сравнивают вычисленное перемещение с вычисленной точностью локаций. Посредством ЧК сравнивают вычисленные расстояния с вычисленным расстоянием из ЗУ. Посредством ПЛВ вычисляют логическую функцию «ИЛИ-НЕ», принимающую значение «истина», если ни один из параметров движения объекта или изменение мощности сигнала не выше пороговых значений и вычисленное перемещение ниже вычисленной точности измерений. Посредством ВЛВ вычисляют логическую функцию «И», принимающую значение «истина», если вычисленное расстояние меньше вычисленного расстояния в ЗУ, и упомянутая логическая функция «ИЛИ-НЕ» имеет значение «истина». Посредством ЗБ записывают вычисленное расстояние в ЗУ, если упомянутая функция «И» имеет значение «истина».
Если на выходе ПЛВ возникает значение «ложь», например, когда на выходе любого из компараторов ПК, ВК или ТК возникает значение «истина», вся процедура измерений повторяется заново. В этом случае система не проводит уточнение измерений (так как объект движется) с течением времени, а для вычисления локаций используют текущие значения расстояний.
ПРИМЕР 3
На фиг.4 наглядно показано, как именно накопление локаций неподвижного радиоузла позволяет улучшить точность.
Когда скорости и/или ускорения радиоузла и изменения мощности радиосигнала ниже пороговых значений, выбирают минимальное значение (R+dR)min из серии последовательных значений для каждой пары радиоузел-РЗИМ:
R+dR1, R+dR2,…, R+dRn,
где dRi - завышение i-го замера относительно истинного расстояния R
измеренных расстояний между радиоузлом и РЗИМ за период покоя радиоузла. Поскольку истинное расстояние между покоящимися узлами R=const, то R+dR будет минимальным, когда минимально завышение dR.
Как показано на фиг.4, если очередной замер расстояний между неподвижным радиоузлом и РЗИМ В и С дает такие же результаты, как и предыдущий замер Rk, а от узла А получено значительно меньшее расстояние (Rk+1), то после уточняющих расчетов предполагаемое местонахождение радиоузла сдвинулось в точку 2, а площадь области перекрытия окружностей уменьшилась, следовательно, точность локации увеличилась.
ПРИМЕР 4
В одном из частных вариантов применения заявленный способ применяют в системе, содержащей радиоузлы, РЗИМ и средства управления и обработки данных (СУОД).
Радиоузлы могут периодически выходить из состояния пониженного энергопотребления и передавать радиосигнал, который принимается множеством РЗИМ, в зоне покрытия которых находится радиоузел. РЗИМ объединены между собой в единую информационную среду посредством проводной или беспроводной телекоммуникационной сети. Данные о радиосигналах передаются по упомянутой сети в упомянутые СУОД.
СУОД осуществляет выбор РЗИМ и запускает процессы измерения расстояний заявленным способом посредством выбранных РЗИМ (компетентных для данного радиоузла). При этом радиоузел вначале выходит из режима пониженного энергопотребления (по таймеру или нажатию кнопки), передает радиосигнал, индицирующий готовность к продолжению работы (датаграмма «я проснулся»), в течение заданного периода времени принимает и передает радиосигналы, связанные с измерением расстояний заявленным способом, и по окончании измерений переходит в режим пониженного энергопотребления. В процессе работы РЗИМ осуществляют непрерывный прием упомянутых радиосигналов «я проснулся» от всех радиоузлов, находящихся в зоне покрытия, непрерывно принимают и передают радиосигналы, связанные с измерением расстояний заявленным способом, только от/на радиоузлы, для которых они являются компетентными и транслируют информацию о принятых сигналах «я проснулся» и результаты измерений и/или вычислений в единую информационную среду для СУОД. СУОД принимают сведения о поступлении упомянутых радиосигналов «я проснулся», собирают данные измерений и/или вычислений, на их основе вычисляют локацию радиоузла и при необходимости сохраняют локации в базе данных. Выбор РЗИМ, компетентной для определенного радиоузла, может осуществляться по критерию мощности сигнала или по критерию силы влияния РЗИМ на точность локации.
Система позволяет определять локацию радиоузла как в закрытом помещении, так на открытой местности, на которой расставлены РЗИМ, в условиях как прямолинейного, так и непрямолинейного распространения радиосигнала.
ПРИМЕР 5
В одном из вариантов осуществления заявленного способа для вычисления точности локации измеренные расстояния, как показано на фиг.7, представляют в виде окружностей, центрами которых являются РЗИМ, причем радиоузел должен находиться в области их перекрытия. Для оценки точности локации позицию радиоузла (точка X) выбирают равноудаленной от дуг, которыми образована область локации. Если такой точки не существует (это возможно, в частности, если область перекрытия образована четырьмя и более окружностями), то позицию радиоузла выбирают таким образом, чтобы разница между отрезками XRi - XRj была минимальной (т.е.  Как показано на фиг.7, в качестве оценки точности локации выбирают среднюю разность отрезков OiRi - OiХ, где n - количество окружностей, образующих область локации (например, для ситуации, показанной на фиг.7, точность локации Асс оценивается как Асc=(O1R1-O1X+O2R2-O2X+О3R3-О3Х)/3).
Как показано на фиг.7, в качестве оценки точности локации выбирают среднюю разность отрезков OiRi - OiХ, где n - количество окружностей, образующих область локации (например, для ситуации, показанной на фиг.7, точность локации Асс оценивается как Асc=(O1R1-O1X+O2R2-O2X+О3R3-О3Х)/3).
ПРИМЕР 6
На фиг.5 наглядно показано, как именно увеличение количества РЗИМ позволяет уточнить локацию неподвижного радиоузла.
Если при реализации заявленного способа в момент времени N были измерены расстояния до k РЗИМ, а в следующий момент времени N+1 были измерены расстояния до других j РЗИМ, то можно рассчитать локацию по k+j значениям расстояний до РЗИМ в период покоя радиоузла.
ПРИМЕР 7
Координаты радиоузла и соответствующие им точности локации можно накапливать в хронологической последовательности и на их основе аппроксимировать траекторию движения радиоузла.
Для уменьшения ошибки определения локации можно усреднять несколько последовательных локаций, а для еще более точного усреднения - использовать координаты точек, взятых с коэффициентом, пропорциональным точности локации -Асc (определение величины Асс приведено в примере 6). Как показано на фиг.10, траектория может дополнительно сглаживаться известными методами, например, с помощью метода наименьших квадратов. Рассмотрим точки а1, а2, а3, а4 и а5, представляющие собой локации радиоузла в хронологической последовательности, где а5 - текущая локация с координатами центра X5,Y5 и коэффициентом Асс5, характеризующим точность локации. Для каждой тройки точек (а1, а2, а3), (а2, а3, а4), (а3, а4, а5) усреднением с учетом наборов коэффициентов точностей (Асс1, Асс2, Асс3), (Асс2, Асс3, Асс4), (Асс3, Асс4, Асс5) (механизм описан выше) определяют геометрическое место точек о1, о2, о3 (координаты Xoi, Yoi для каждой точки о1, о2, о3).
Хoi=(1/Асci,)*Хai+(1/Acci+1)*Xa(i+1)+(1/Асci+2)*Ха(i+2))/(1/Аcci+1/Acci+1+1/Acci+2),
Yoi=(1/Асci,)*Yai+(1/Acci+1)*Ya(i+1)+(1/Асci+2)*Yа(i+2))/(1/Аcci+1/Acci+1+1/Acci+2),
i представляет собой целое число 1, 2 или 3.
В качестве локаций радиоузла выбирают точки о1, о2, о3, либо аппроксимируют их линией L, например, с помощью метода наименьших квадратов.
ПРИМЕР 8
Для вычисления локации радиоузла внутри области локации в заявленном способе могут быть использованы различные подходы.
В норме координаты получают усреднением координат точек пересечения окружностей, образующих область перекрытия. Для более точной локации координаты точек пересечения окружностей могут усреднять с коэффициентами, зависящими от мощности радиосигнала.
В случае если радиоузел находится вне многоугольника, образованного РЗИМ (см. фиг.8), то для определения локации находят геометрическое место точки, равноудаленной от окружностей, предварительно скорректированных с учетом погрешности. Если существует несколько равноудаленных точек, то, как показано на фиг.9, выбирают точку, расстояние от которой до окружностей является наименьшим.
Описанные способы определения локации для точки, находящейся вне многоугольника, образованного РЗИМ, могут быть применены также для случая, когда объект находится внутри многоугольника в случае местности, где переотражения незначительны.
Изменения и модификации описанной группы изобретений, а также дополнительные применения принципов изобретения, очевидные для специалистов в данной области техники, так же входят в объем изобретения.
Настоящая группа изобретений относится к беспроводной радиосвязи, в частности к устройствам и к способам для определения местоположения (локации) радиоузла относительно местоположения радиоузлов с заранее известным местоположением. Предложен способ и система локации радиоузла, а также узел обработки данных, в которых улучшение точности локаций достигается за счет выбора минимальных значений расстояний, измеренных по времени распространения радиосигнала за весь период неподвижности радиоузла. Достигаемый технический результат - повышение помехоустойчивости способа локации, сокращение длительности измерительного периода, возможность локации радиоузлов разнородных по используемому способу определения движения. 3 н. и 27 з.п. ф-лы, 11 ил.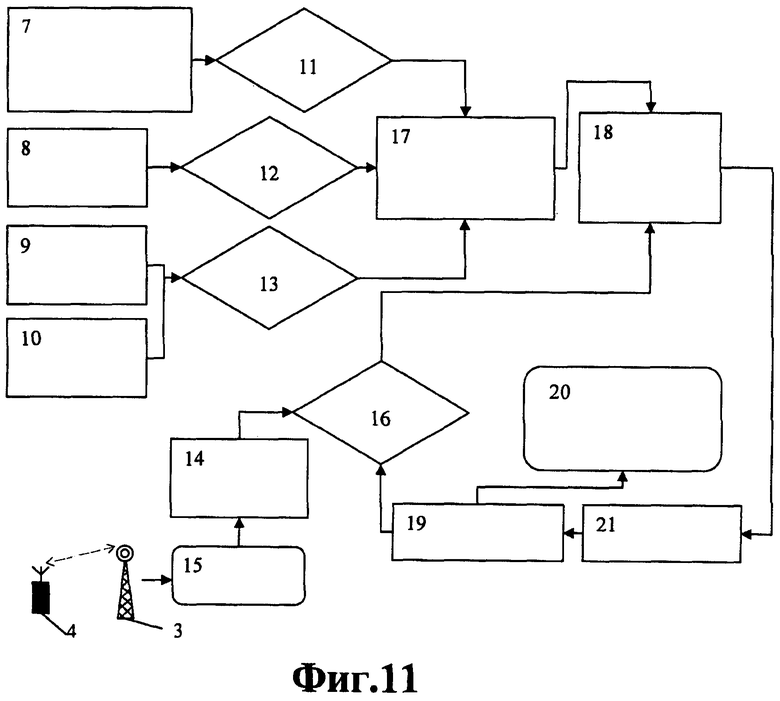
1. Способ локации радиоузла посредством измерения расстояний между упомянутым радиоузлом и радиоузлами с заранее известными местоположениями (РЗИМ) по времени распространения радиосигнала между ними, в котором
измеряют параметры движения упомянутого радиоузла,
измеряют мощность радиосигнала от упомянутого радиоузла,
вычисляют перемещение радиоузла с предварительно заданной предельной скоростью за период времени между локациями,
вычисляют точность локации по зависимости от размеров области
перекрытия окружностей с центрами в упомянутых РЗИМ и радиусами, равными измеренным расстояниям между ними и упомянутым радиоузлом,
сравнивают упомянутые параметры движения и изменения мощности радиосигнала с предварительно заданными пороговыми значениями, а упомянутое перемещение - с упомянутой точностью локации и вычисляют локацию с учетом минимальных расстояний, измеренных за весь период неподвижности, в течение которого упомянутые параметры движения и изменение упомянутой мощности меньше упомянутых пороговых значений, а упомянутое перемещение меньше упомянутой точности локаций.
2. Способ по п.1, в котором измеряют расстояние по методу симметричного двухстороннего двухступенчатого измерения расстояний.
3. Способ по п.1, в котором измеряют расстояние по методу ROUND TRIP TIME (RTT) - с задержкой между исходящим и ответным сигналом.
4. Способ по п.1, в котором в качестве РЗИМ используют радиоузлы, локация которых осуществлена ранее.
5. Способ по любому из пп.1-4, в котором измеряют расстояние, по меньшей мере, до одной РЗИМ.
6. Способ по любому из пп.1-4, в котором измеряют расстояние, по меньшей мере, до трех РЗИМ, расположенных на расстоянии друг от друга.
7. Способ по любому из пп.1-4, в котором при упомянутой точности локации ниже предварительно заданной величины измеряют расстояния между упомянутым радиоузлом и дополнительными РЗИМ.
8. Способ по любому из пп.1-4, в котором используют такое количество РЗИМ, которое достаточно для достижения предварительно заданной точности локации.
9. Способ по п.1, в котором используемые РЗИМ выбирают с учетом мощности радиосигнала.
10. Способ по п.1, в котором используемые РЗИМ выбирают сравнением силы влияния РЗИМ на точность локации.
11. Способ по п.1, в котором в качестве локации вычисляют геометрическое место внутренней точки области перекрытия окружностей с центрами в упомянутых РЗИМ и радиусами, равными измеренным расстояниям между ними и упомянутым радиоузлом.
12. Способ по п.11, в котором в качестве локации вычисляют геометрическое место внутренней точки, равноудаленной от границ упомянутой области.
13. Способ по п.11, в котором в качестве локации вычисляют геометрическое место внутренней точки, являющейся условным центром массы упомянутой области.
14. Способ по любому из пп.11-13, в котором упомянутую область строят с учетом расстояний, предварительно скорректированных в зависимости от силы сигнала.
15. Способ по любому из пп.11-13, в котором до вычисления локации из упомянутой области перекрытия окружностей исключают предварительно заданные области, в которых упомянутый радиоузел не может находиться.
16. Способ по п.1, в котором измерение упомянутых параметров движения осуществляют посредством магнетометра, акселерометра, одометра, тахометра и/или спидометра.
17. Способ по п.1, в котором измерение упомянутых параметров движения осуществляют по допплеровскому сдвигу частоты радиосигнала.
18. Способ по п.1, в котором дополнительно измеряют разность фаз радиосигнала от радиоузла для определения направления его распространения.
19. Способ по п.1, в котором для измерения расстояния и мощности используют единый радиосигнал.
20. Система локации радиоузла, содержащая в себе: радиоузлы с заранее известным местоположением (РЗИМ), измеритель времени (ИВ) распространения радиосигнала между РЗИМ и упомянутым радиоузлом по времени распространения радиосигнала между ними,
вычислитель расстояний (BP) между РЗИМ и упомянутым радиоузлом, подключенный к упомянутому ИВ,
вычислитель локаций (ВЛ) упомянутого радиоузла с учетом расстояний между РЗИМ и упомянутым радиоузлом,
вычислитель точности (ВТ) локаций упомянутого радиоузла в зависимости от размеров области перекрытия окружностей с центрами в РЗИМ и радиусами равными расстояниям между ним и РЗИМ, вычислитель перемещения (ВП) упомянутого радиоузла с предварительно заданной предельной скоростью за период времени между последовательными локациями,
измеритель параметров движения упомянутого радиоузла (ИПДР), измеритель параметров мощности (ИМ) радиосигналов от упомянутого радиоузла,
первый компаратор (ПК), подключенный к ИПДР и выполненный с возможностью сравнения изменений входного значения с предварительно заданным пороговым значением,
второй компаратор (ВК), подключенный к ИМ и выполненный с возможностью сравнения входного значения с предварительно заданным пороговым значением,
третий компаратор (ТК), подключенный к ВП и ВТ и выполненный с возможностью сравнения входных значений между собой, запоминающее устройство (ЗУ),
четвертый компаратор (ЧК), подключенный к BP и выполненный с возможностью сравнения входного значения и значения в ЗУ, первый логический вычислитель (ПЛВ), выполненный с возможностью вычисления булевой функции «ИЛИ-НЕ»,
второй логический вычислитель (ВЛВ), выполненный с возможностью вычисления булевой функции «И»,
записывающий блок (ЗБ), выполненный с возможностью записи расстояний между РЗИМ и упомянутым радиоузлом в ЗУ, в которой
выходы ПК, ВК и ТК подключены к входу ПЛВ, выход ПЛВ и выход ЧК подключены к входу ВЛВ, а выход ВЛВ подключен к ЗБ.
21. Система по п.20, дополнительно содержащая пятый компаратор (5К), выполненный с возможностью сравнения упомянутой точности локации с предварительно заданным пороговым значением и шестой компаратор (ШК), выполненный с возможностью сравнения влияний РЗИМ на упомянутую точность локации и блок управления (БУ), выполненный с возможностью активации такого количества РЗИМ, которое необходимо для достижения точности локации выше упомянутого порогового значения.
22. Система по п.20, в которой, по меньшей мере, два из ВЛ, BP, ВТ, ВП, ПЛВ, ВЛВ, ПК, ВК, ТК, ЧК, ЗБ, 5К, ШК и БУ скомпонованы в одной интегральной схеме.
23. Система по любому из пп.20-22, в которой, по меньшей мере, один из ВЛ, BP, ВТ, ВП, ПЛВ, ВЛВ, ПК, ВК, ТК, ЧК, ЗБ, 5К, ШК и БУ выполнен на основе, по меньшей мере, одного универсального процессора, ASIC-процессора, DSP-процессора, программируемой логической интегральной схемы (ПЛИС) и/или электронного аналогового вычислительного устройства.
24. Система по любому из пп.20-22, в которой РЗИМ и ВЛ, BP, ВТ, ВП, ПЛВ, ВЛВ, ПК, ВК, ТК, ЧК, ЗБ, 5К, ШК и БУ связаны между собой единой проводной и/или беспроводной сетью.
25. Система по п.20, в которой ИПДР представляет собой магнетометр, акселерометр, одометр, тахометр и/или спидометр.
26. Система по п.20, в которой ИПДР выполнен на основе измерителей допплеровского смещения.
27. Узел обработки данных для реализации способа локации радиоузла по п.1, содержащий в себе:
телекоммуникационный интерфейс (ТИ) для приема параметров движения упомянутого радиоузла, параметров мощности радиосигнала от упомянутого радиоузла и параметров расстояния между упомянутым радиоузлом и радиоузлом с заранее известным местоположением (РЗИМ), вычислитель локаций (ВЛ) радиоузла с учетом параметров расстояния между ним и РЗИМ, вычислитель расстояний (BP),
вычислитель точности (ВТ) локаций упомянутого радиоузла в зависимости от размеров области перекрытия окружностей с центрами в РЗИМ и радиусами равными расстояниям между ним и РЗИМ, вычислитель перемещения (ВП) упомянутого радиоузла с предварительно заданной предельной скоростью за период времени между последовательными локациями,
первый компаратор (ПК), выполненный с возможностью сравнения упомянутых параметров движения с предварительно заданными пороговыми значениями,
второй компаратор (ВК), выполненный с возможностью сравнения изменения упомянутых параметров мощности радиосигнала с предварительно заданным пороговым значением,
третий компаратор (ТК), подключенный к ВП и ВТ и выполненный с возможностью сравнения входных значений между собой, запоминающее устройство (ЗУ),
четвертый компаратор (ЧК), подключенный к BP и выполненный с возможностью сравнения входного значения и значения в ЗУ, первый логический вычислитель (ПЛВ), выполненный с возможностью вычисления булевой функции «ИЛИ-НЕ»,
второй логический вычислитель (ВЛВ), выполненный с возможностью вычисления булевой функции «И»,
записывающий блок (ЗБ), выполненный с возможностью записи параметров расстояний между РЗИМ и упомянутым радиоузлом в ЗУ, в котором
выходы ПК, ВК и ТК подключены к входу ПЛВ, выход ПЛВ и выход ЧК подключены к входу ВЛВ, а выход ВЛВ подключен к ЗБ.
28. Узел по п.27, в котором, по меньшей мере, два из ВЛ, BP, ВТ, ВП, ПЛВ, ВЛВ, ПК, ВК, ТК, ЧК и ЗБ скомпонованы в одной интегральной схеме.
29. Узел по любому из пп.27 или 28, в котором, по меньшей мере, один из ВЛ, BP, ВТ, ВП, ПЛВ, ВЛВ, ПК, ВК, ТК, ЧК и ЗБ выполнен на основе, по меньшей мере, одного универсального процессора, ASIC-процессора, DSP-процессора, программируемой логической интегральной схемы (ПЛИС) и/или электронного аналогового вычислительного устройства.
30. Узел по любому из пп.27 или 28, в котором РЗИМ и ВЛ, BP, ВТ, ВП, ПЛВ, ВЛВ, ПК, ВК, ТК, ЧК и ЗБ связаны между собой единой проводной и/или беспроводной сетью.
| Беспроводные технологии, 2008, 2, с.48-51, статья ГОГОЛЕВА А | |||
| и др | |||
| Точность определения расстояний с помощью технологии nanoLoc | |||
| RU 98123169 А, 10.10.2000 | |||
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ОБЪЕКТА | 2008 |
|
RU2377594C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ГИБРИДНОГО ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ В БЕСПРОВОДНОЙ СЕТИ СВЯЗИ | 2004 |
|
RU2372750C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ПОДВИЖНОГО ОБЪЕКТА | 1991 |
|
RU2018858C1 |
| WO 2007067852 А2, 14.06.2007 | |||
| WO 2008143783 А2, 27.11.2008. | |||

