Область техники, к которой относится изобретение
Изобретение относится к игровым контроллерам, содержащим систему обезвешивания, в частности к всенаправленной беговой дорожке, которая может быть применена для игр в виртуальной реальности, тренажерной подготовке или в качестве реабилитационного медицинского приспособления.
Уровень техники
Из уровня техники известны различные всенаправленные беговые дорожки, содержащие каркас, в который интегрированы контактная поверхность, систему подвеса пользователя, контроллеры (см. например, CN 106448318 A, опубл. 22.02.2017, CN 10773910 A, опубл. 09.03.2018, или WO 2019/081958 A1, опубл. 02.05.2019). Известные игровые контроллеры не позволяют в той или иной мере осуществить все запросы пользователей по обеспечению реальности получаемых ощущений, известные системы обезвешивания далеки от обеспечения реального функционирования мышц пользователя, не обеспечивают вертикальную степень свободы пользователю.
Технической задачей изобретения является создание инновационного игрового контроллера - всенаправленной беговой дорожки с системой обезвешивания, имеющего основные элементы, их конструктивные особенности, расположение и взаимосвязь в составе всенаправленной беговой дорожки, позволяющие осуществить ее назначение.
При решении технической задачи изобретением достигается технический результат, заключающийся в расширении арсенала средств - всенаправленных беговых дорожек с системами обезвешивания пользователей.
Раскрытие сущности изобретения
Изобретение представляет собой всенаправленную беговую дорожку, содержащую каркас, внизу которого интегрирована параболической формы контактная поверхность, систему обезвешивания, взаимодействующую с ней систему подвеса пользователя, контроллер, при этом, согласно изобретению, каркас выполнен в виде пространственной рамы клетчатого исполнения, на верху которой закреплена система обезвешивания, состоящая из приводного узла, содержащего активную и пассивную часть, при этом активная часть представлена электроприводом, управляемым с помощью драйвера, а пассивной частью является рама крепления электропривода к каркасу.
Параболическая контактная поверхность покрыта фторопластом.
Подвес пользователя производится через ленточную привязь парашютного типа, с одного конца которой пристегивается сам пользователь, а второй конец привязи закрепляется на шкивах электропривода подвесного узла.
Электропривод содержит два сервомотора и два серводрайвера.
Краткое описание чертежей
Сущность изобретения может быть дополнительно пояснена неограничивающими примерами, отраженными на сопроводительных фигурах 1-4, где:
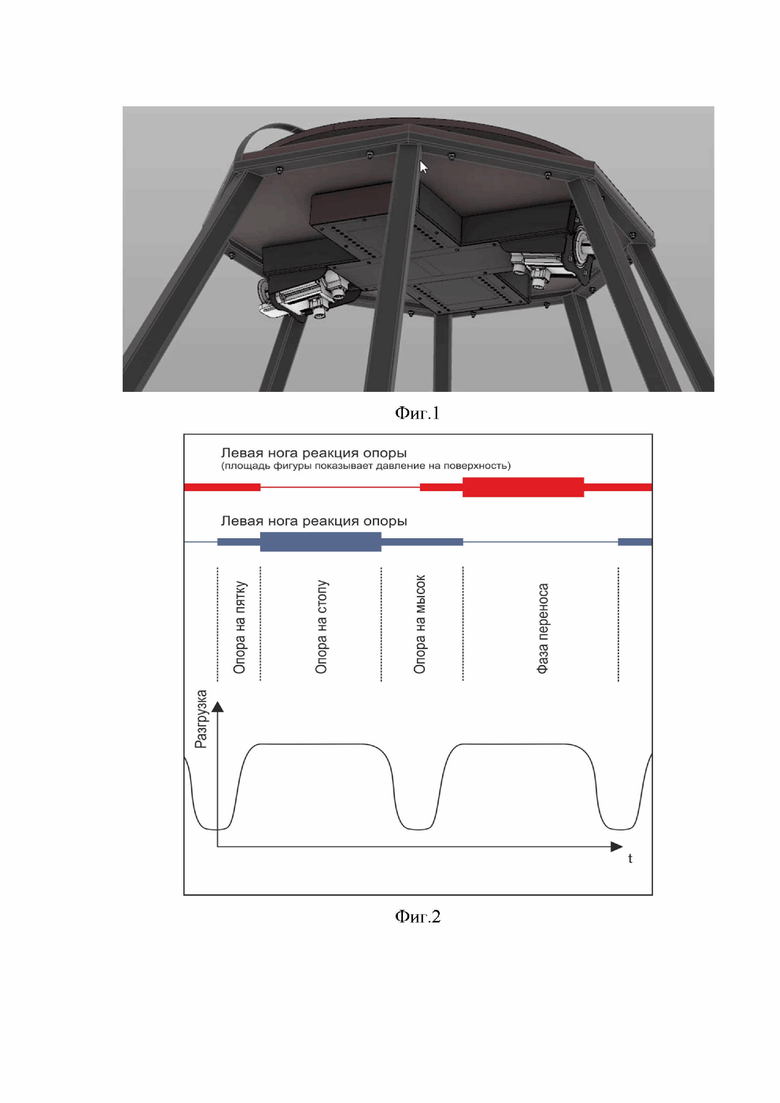
Фиг. 1 - 3D-модель основного узла активной части конструкции;
Фиг. 2 - разгрузочно-фазовая диаграмма при горизонтальной локомоции человека;
Фиг. 3 - 3D-модель каркаса;
Фиг. 4 - фото общего вида изобретения.
Осуществление изобретения
Изобретение представляет собой всенаправленную беговую дорожку, содержащую каркас, внизу которого интегрирована параболической формы контактная поверхность, систему обезвешивания, взаимодействующую с ней систему подвеса пользователя, контроллер. Каркас выполнен в виде пространственной рамы клетчатого исполнения, на верху которой закреплена система обезвешивания, состоящая из приводного узла, содержащего активную и пассивную часть. При этом активная часть представлена электроприводом, управляемым с помощью драйвера, а пассивной частью является рама крепления электропривода к каркасу.
Неограничивающий пример изобретения представлен ниже.
Устройство содержит следующие компоненты для весовой разгрузки пользователя:
1) Щеточный узел (для подачи питания 220В на силовые элементы от электророзетки с возможностью бесконечного вращения в любую сторону);
2) Опорный подшипник в совокупности с опорными роликами;
3) 2 сервомотора мощностью до 1500 Вт каждый;
4) 2 серводрайвера мощностью до 1500 Вт каждый;
5) Автономный контроллер управления с блоком питания;
6) 2 вспомогательных опорных ролика для блокировки перекоса;
7) 2 вспомогательных вентилятора охлаждения серводрайверов;
8) Сборочная рама для сервомоторов, серводрайверов, контроллера, блока питания.
Щеточный узел и опорный подшипник с роликами позволяют передать электропитание на сервоприводной узел и воспринимать вертикальные статические и динамические механические нагрузки.
Система обезвешивания работает на паре сервомоторов, которые настраиваются на вес пользователя в полуавтоматическом режиме: по запросу через интерфейс пользователь взвешивается, затем можно указать вес разгрузки в процентах, который будет использоваться для разгрузки. Далее пользователь обезвешивается по кнопке через web-интерфейс. Контроллеры расположены на подвижной, вращающейся части конструкции, поэтому подключение к контроллеру производится со смартфона, планшета или ноутбука с интернет-браузером по средствам сети WiFi. Таким образом, доступно удаленное управление системой обезвешивания из любого удобного места, где есть беспроводная сеть Интернет.
Для организации псевдоперемещения в горизонтальной плоскости в основании изобретения встроена параболическая «тарелка». Под псевдоперемещением подразумевается иллюзия неограниченного движения вперед, назад, в сторону при том, что фактически пользователь остается на одном месте и смещается не более чем на 1-1,5 метра. Существующие на данный момент решения в мире делятся на 2 вида: псевдоперемещение при смещении поверхности под ногами для компенсации смещения пользователя (активная дорожка) и псевдоперемещение без смещения поверхности под ногами для компенсации смещения пользователя (пассивная дорожка скольжения).
Разработанная дорожка относится ко второму виду и не предполагает перемещение поверхности под пользователем, пользователь должен самостоятельно двигать ногами, как при ходьбе на месте. Разработанная система разгрузки позволяет решить проблему неправильной работы мышц при имитации ходьбы на пассивной дорожке. Простой кинематический анализ ходьбы человека показывает, что есть всего две фазы для каждой ноги: фаза опоры и фаза переноса. Разберем каждую фазу с точки зрения имитации и нагрузки на мышцы.
За точку отсчета примем момент времени опоры на пятку. В этот момент имитация через разгрузку начинает нарастать, необходимо запустить обратный механизм скольжения, который вернет ногу. Именно в этот момент начнется перенос веса с одной ноги на другую. Следующий момент времени - опора на всю стопу. В этот момент разгрузка максимальная, т.к. происходит перенос другой ноги, и пользователю можно помочь, и снять реакцию опоры. Далее - опора на передний отдел стопы. В этот момент пользователь начинает падать, ожидая опору на пятку на другой ноге. В этот момент нужно дать ему почувствовать свой вес, дать отработать мышцам. Как только опора сработала, мы его тут же разгружаем. И происходит фаза переноса.
Другими словами, для каждой ноги мы чувствуем разгрузку два раза, в фазе переноса и в фазе опоры на всю стопу. Это упрощает оба действия с точки зрения нагрузки на опорно-двигательный аппарат, что позволяет ходить часами без заметной усталости, но при этом полностью получать всю мышечную реакцию.
Исходя из этого представления можно понять, что 90% времени человек находится в разгрузке, которая активно управляется контроллерами и реализуется сервоприводами. В зависимости от подготовленности пользователя она выставляется на уровне 0,7-0,15g. В моменте падения, когда опорная нога переходит из фазы опоры на всю стопу, в фазу опоры на передний отдел стопы, разгрузка снижается до 0,9-0,5g. Полностью она не отключается для контроля поддержки, чтобы пользователь, в случае если он оступился, не упал и не травмировался.
Немаловажной фазой при псевдоперемещении является процесс попеременного проскальзывания ног пользователя. Это процесс происходит на контактной поверхности неподвижной части дорожки и подошвой пользователя. Для оптимизации процесса проскальзывания необходимо использовать материал, обладающий двумя ключевыми свойствами: высокая износостойкость и минимальными с точки зрения коэффициента трения скольжения антифрикционными свойствами. На рынке наиболее доступен и широко представлен фторопласт, он же запатентован как «тефлон». Данный материал обладает высочайшей износостойкостью в своем ценовом сегменте и относительно высокими антифрикционными свойствами. Данным материалом выслана внутренняя часть пассивной дорожки.
По фторопласту в достаточной степени скользит почти любой материал, но наиболее оптимальный результат показала синтетика, из которой сделаны чехлы-носки для обуви пользователя.
Диаметр самой «тарелки» и ее форма поверхности подобраны таким образом, чтобы пользователь при ходьбе испытывал схожие ощущения при псевдоходьбе, как при реальной ходьбе.
Каркас изделия состоит из усиленной пространственной рамы клетчатого исполнения на верху которой закреплен приводной узел. Приводной узел состоит из активной и пассивной частей. Активная часть представлена электроприводом, управляемым с помощью драйвера. Пассивной частью является рама крепления электропривода к пространственной раме клетчатого исполнения. В основании пространственной рамы клетчатого исполнения интегрирована "тарелка" всенаправленной беговой дорожки специального покрытия (фторопласта), для обеспечения скольжения пользователя при горизонтальном перемещении. "Тарелка" имеет параболический контур поверхности при любом сечении, проходящем через ось вращения фигуры "тарелка".
Подвес пользователя производится через ленточную привязь парашютного типа, с одного конца которой пристегивается сам пользователь, а второй конец привязи закрепляется на шкивах электропривода подвесного узла.
Описание изобретения позволяет создать всенаправленную беговую дорожку с системой обезвешивания, имеющую основные элементы, их конструктивные особенности, расположение и взаимосвязь в составе всенаправленной беговой дорожки, позволяющие осуществить ее назначение, и расширить арсенал таких средств.
Поиск по общедоступным источникам информации показал, что из уровня техники не известна и явным образом не следует вся совокупность признаков предложенного изобретения, в связи с чем изобретение соответствует условиям патентоспособности «новизна» и «изобретательский уровень».
Заявленное изобретение состоит из стандартных для этой области техники материалов и элементов, взаимосвязанных определенным образом, то есть может быть использовано в промышленности, ввиду чего изобретение соответствует условию патентоспособности «промышленная применимость».
Следует понимать, что после рассмотрения специалистом приведенного описания с примером осуществления предлагаемого изобретения, для него станут очевидными другие изменения, модификации и варианты реализации изобретения. Таким образом, все подобные изменения, модификации и варианты реализации, а также другие области применения, не имеющие расхождений с сущностью настоящего изобретения, следует считать защищенными настоящим изобретением в объеме прилагаемой формулы.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ОБЕЗВЕШИВАНИЯ ЭЛЕМЕНТОВ КОСМИЧЕСКИХ АППАРАТОВ ПРИ НАЗЕМНЫХ ИСПЫТАНИЯХ | 2020 |
|
RU2744925C1 |
| Устройство для воспроизведения всенаправленного пешего передвижения пользователя | 2023 |
|
RU2835014C2 |
| Устройство для тренировки и отдыха | 1988 |
|
SU1540840A1 |
| Тренажер для симуляции всенаправленного пешего передвижения пользователя | 2023 |
|
RU2835087C2 |
| Всенаправленная дорожка для виртуальной реальности | 2022 |
|
RU2784682C1 |
| Система обезвешивания сегментов тела человека для моделирования эффектов микрогравитации и способ её использования | 2024 |
|
RU2839349C1 |
| ВСЕНАПРАВЛЕННАЯ БЕГОВАЯ ДОРОЖКА С ОДНОЙ ЛЕНТОЙ | 2011 |
|
RU2563789C2 |
| Беговая дорожка с адаптивной подстройкой скорости и угла наклона полотна | 2023 |
|
RU2804958C1 |
| ТРЕНАЖЕРНЫЙ КОМПЛЕКС ДЛЯ МЕХАНОТЕРАПИИ НИЖНИХ КОНЕЧНОСТЕЙ | 2023 |
|
RU2802462C1 |
| БЕГОВОЙ ТРЕНАЖЁР С СИСТЕМОЙ ВИРТУАЛЬНОЙ РЕАЛЬНОСТИ И СПОСОБ ЕГО РАБОТЫ | 2019 |
|
RU2696754C1 |


Изобретение относится к игровым контроллерам, содержащим систему обезвешивания, в частности к всенаправленной беговой дорожке, которая может быть применена для игр в виртуальной реальности, тренажерной подготовке или в качестве реабилитационного медицинского приспособления. Всенаправленная беговая дорожка содержит каркас, внизу которого интегрирована параболической формы контактная поверхность, систему обезвешивания, взаимодействующую с ней систему подвеса пользователя, контроллер. Каркас выполнен в виде пространственной рамы клетчатого исполнения, на верху которой закреплена система обезвешивания, состоящая из приводного узла, содержащего активную и пассивную часть. При этом активная часть представлена электроприводом, управляемым с помощью драйвера, а пассивной частью является рама крепления электропривода к каркасу. Технический результат заключается в расширении арсенала средств – всенаправленных беговых дорожек с системами обезвешивания пользователей. 3 з.п. ф-лы, 4 ил.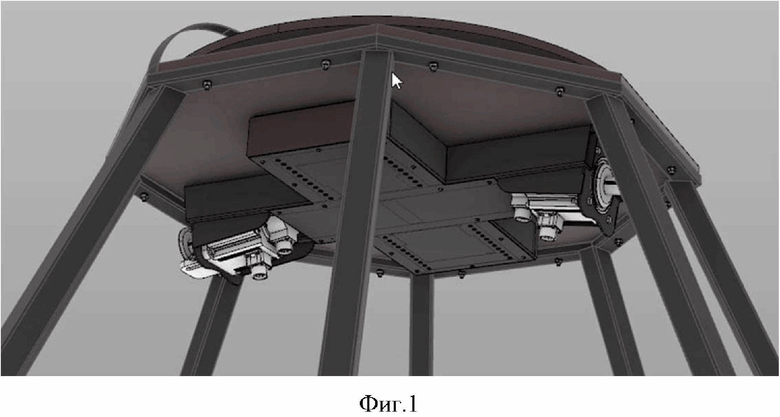
1. Всенаправленная пассивная беговая дорожка скольжения, содержащая каркас, внизу которого интегрирована параболической формы контактная поверхность, систему обезвешивания, взаимодействующую с ней систему подвеса пользователя, контроллер, отличающаяся тем, что каркас выполнен в виде пространственной рамы клетчатого исполнения, на верху которой закреплена система обезвешивания, состоящая из приводного узла, содержащего активную и пассивную часть, при этом активная часть представлена электроприводом, управляемым с помощью драйвера, а пассивной частью является рама крепления электропривода к каркасу.
2. Всенаправленная пассивная беговая дорожка скольжения по п.1, отличающаяся тем, что пораболическая контактная поверхность покрыта фторопластом.
3. Всенаправленная пассивная беговая дорожка скольжения по любому из пп.1,2, отличающаяся тем, что подвес пользователя производится через ленточную привязь парашютного типа, с одного конца которой пристегивается сам пользователь, а второй конец привязи закрепляется на шкивах электропривода подвесного узла.
4. Всенаправленная пассивная беговая дорожка скольжения по п.1, отличающаяся тем, что электропривод содержит два сервомотора и два серводрайвера.
| WO 2019081958 A1, 02.05.2019 | |||
| US 6152854 A, 28.11.2000 | |||
| Кресло-качалка (варианты) | 2017 |
|
RU2648194C2 |
| WO 2003035184 A1, 01.05.2003 | |||
| US 2008201011 A1, 21.08.2008. | |||

