ОБЛАСТЬ ТЕХНИКИ
Настоящее раскрытие изобретения относится к технической области измерений, в частности, к способу и устройству для количественной оценки вязкоупругости среды.
УРОВЕНЬ ТЕХНИКИ
При вибрационном возбуждении среды характеристики распространения вибрации в среде определяются вязкоупругими свойствами среды. Измеряя характеристики распространения вибрации, можно определить вязкоупругие свойства среды.
Вышеизложенный принцип в настоящее время применяется в ряде областей техники. Например, в медицине при исследовании органа или ткани, в частности, печени, щитовидной железы или мышцы, можно локализовать поражение путем количественной оценки вязкоупругих свойств среды.
Таким образом, задачей изобретения является эффективная и точная реализация количественной оценки вязкоупругости среды.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Настоящим изобретением предложен способ и устройство для количественной оценки вязкоупругости среды. Ниже приводится краткое описание основного содержания некоторых аспектов раскрытых вариантов осуществления. Настоящее описание сущности изобретения не является общим описанием и не предназначено для определения ключевых/существенных составных элементов или раскрытия защищаемого объема изобретения. Единственная цель заключается в упрощенном представлении в качестве предисловия к последующему подробному раскрытию.
Первый аспект настоящего изобретения описывает способ количественной оценки вязкоупругости среды, содержащий следующие этапы:
построение пространственно-временного графика распространения вибрации после вибрационного возбуждения среды;
проецирование угла вдоль каждого угла в пределах заданного диапазона углов на пространственно-временном графике и определение уклона пространственно-временного графика, соответствующего углу с максимальной энергией сигнала; и
получение параметра вязкоупругости среды в соответствии с уклоном.
В первом дополнительном варианте способа проецирование угла вдоль каждого угла в пределах заданного диапазона углов на пространственно-временном графике и определение уклона пространственно-временного графика, соответствующего углу с максимальной энергией сигнала, включает следующие операции:
вычисление интегралов вдоль каждого угла в пределах заданного диапазона углов на пространственно-временном графике;
определение угла с наибольшим значением интеграла как угла уклона линии уклона пространственно-временного графика; и
определение уклона линии уклона с использованием угла уклона.
Во втором дополнительном варианте способа проецирование угла вдоль каждого угла в пределах заданного диапазона углов на пространственно-временном графике и определение уклона пространственно-временного графика, соответствующего углу с максимальной энергией сигнала, включает следующие операции:
вычисление полутоновой матрицы смежности вдоль каждого угла в пределах заданного диапазона углов на пространственно-временном графике;
получение текстуры изображения для каждого угла;
определение угла с максимальной энергией сигнала как угла уклона линии уклона пространственно-временного графика с использованием функции текстуры изображения; и
определение уклона линии уклона с использованием угла уклона.
В третьем дополнительном варианте, основанном на первом или втором варианте, способ дополнительно содержит следующую операцию:
фильтрация отраженных волн на пространственно-временном графике перед проецированием угла.
В четвертом дополнительном варианте, основанном на третьем варианте, осуществления фильтрация отраженных волн на пространственно-временном графике включает следующую операцию: фильтрация направления на пространственно-временном графике.
В пятом дополнительном варианте способа, основанном на первом или втором варианте, построение пространственно-временного графика распространения вибрации включает следующую операцию:
построение пространственно-временного графика распространения вибрации вдоль заданного направления распространения вибрации.
Второй аспект настоящего изобретения описывает устройство для количественной оценки вязкоупругости среды, содержащее:
модуль формирования изображения, выполненный с возможностью построения пространственно-временного графика распространения вибрации после вибрационного возбуждения среды;
модуль определения, выполненный с возможностью проецирования угла вдоль каждого угла в пределах заданного диапазона углов на пространственно-временном графике и определения уклона пространственно-временного графика, соответствующего углу с максимальной энергией сигнала; и
модуль количественной оценки, выполненный с возможностью получения параметра вязкоупругости среды в соответствии с уклоном.
В первом дополнительном варианте осуществления устройства модуль определения содержит:
вспомогательный расчетный модуль, выполненный с возможностью вычисления интегралов на пространственно-временном графике вдоль каждого угла в пределах заданного диапазона углов;
вспомогательный определяющий модуль, выполненный с возможностью определения угла с наибольшим значением интеграла, вычисленного вспомогательным расчетным модулем как угол уклона линии уклона пространственно-временного графика; и определения угла уклона линии уклона с использованием угла уклона.
Во втором дополнительном варианте осуществления устройства модуль определения содержит:
вспомогательный расчетный модуль, выполненный с возможностью вычисления полутоновой матрицы смежности вдоль каждого угла в пределах заданного диапазона углов на пространственно-временном графике;
вспомогательный определяющий модуль, выполненный с возможностью получения функции текстуры изображения каждого угла; определения угла с максимальной энергией сигнала в качестве угла уклона линии уклона пространственно-временного графика при помощи функции текстуры изображения; и определения уклона линии уклона с использованием угла уклона.
В третьем дополнительном варианте, основанном на первом или втором варианте, устройство дополнительно содержит:
модуль фильтрации, выполненный с возможностью фильтрации отраженных волн на пространственно-временном графике перед проецированием угла.
В четвертом дополнительном варианте, основанном на первом или втором варианте осуществления, модуль формирования изображения строит пространственно-временной график распространения вибрации в заданном направлении распространения вибрации.
Третий аспект настоящего изобретения описывает устройство для количественной оценки вязкоупругости среды, содержащее:
память, в которой хранятся инструкции по выполнению;
процессор, выполненный с возможностью считывания инструкций по выполнению следующих операций:
построение пространственно-временного графика распространения вибрации после вибрационного возбуждения среды;
проецирование угла вдоль каждого угла в пределах заданного диапазона углов на пространственно-временном графике и определение уклона пространственно-временного графика, соответствующего углу с максимальной энергией сигнала; и
получение параметра вязкоупругости среды в соответствии с уклоном.
Технические решения, предлагаемые согласно вариантам осуществления изобретения, могут иметь следующие полезные эффекты:
угол с максимальной энергией сигнала на пространственно-временном графике определяется с помощью проецирования угла, угол с максимальной энергией сигнала соответствует уклону пространственно-временного графика, а уклон пространственно-временного графика соответствует скорости распространения вибрации в среде. Так как скорость распространения вибрации в среде связана с вязкоупругостью среды, то параметр вязкоупругости среды можно количественно рассчитать после определения уклона пространственно-временного графика. Способ и устройство, предложенные настоящим изобретением, не требуют выбирать точки признаков на пространственно-временном графике для вычисления уклона пространственно-временного графика, не подвержены влиянию помех и имеют малую расчетную величину, что позволяет эффективно и точно определять вязкоупругость среды.
Следует понимать, что как приведенное выше общее описание, так и последующее подробное описание приведены только в качестве примера, и не носят ограничительного характера.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Чертежи, включенные в настоящий документ и составляющие часть настоящего описания изобретения, иллюстрируют изобретение и вместе с описанием служат для пояснения принципов настоящего изобретения.
На ФИГ. 1 изображена блок-схема способа количественной оценки вязкоупругости среды в соответствии с одним из вариантов осуществления;
На ФИГ. 2 изображена блок-схема способа количественной оценки вязкоупругости среды в соответствии с одним из вариантов осуществления;
На ФИГ. 3 изображена блок-схема способа количественной оценки вязкоупругости среды в соответствии с одним из вариантов осуществления;
На ФИГ. 4 изображена блок-схема устройства для количественной оценки вязкоупругости среды в соответствии с одним из вариантов осуществления;
На ФИГ. 5 изображена блок-схема модуля определения, показанного на ФИГ. 4;
На ФИГ. 6 изображена блок-схема устройства для количественной оценки вязкоупругости среды в соответствии с одним из вариантов осуществления; и
На ФИГ. 7 изображена блок-схема устройства для количественной оценки вязкоупругости среды в соответствии с одним из вариантов осуществления.
РАСКРЫТИЕ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ ИЗОБРЕТЕНИЯ
Приведенные ниже описания и чертежи иллюстрируют варианты осуществления изобретения в степени, достаточной для их реализации специалистами в данной области. Варианты осуществления изобретения представляют только возможные варианты. Отдельные компоненты и функции необязательны, если явно не указано иное, а порядок выполнения операций может быть изменен. Допускается включение элементов и признаков некоторых вариантов осуществления или замена на элементы и признаки других вариантов осуществления. Объем варианта осуществления настоящего изобретения включает полный объем формулы изобретения и все доступные эквиваленты формулы изобретения. При этом различные варианты осуществления могут быть по отдельности или совместно выражены термином «изобретение». Это сделано для удобства изложения, и если фактически раскрыто более одного изобретения, это не ограничивает автоматически объем применения до одного изобретения или изобретательского замысла. В настоящем документе такие понятия, как «первый» и «второй» используются только для того, чтобы отличить объект или операцию от другого объекта или операции, не требуя и не подразумевая какой-либо существенной связи или зависимости между этими объектами или операциями. Кроме того, термины «включает», «содержит» или любые другие их вариации носят неисключительный характер, то есть процессы, методы или устройства, содержащие ряд элементов, содержат не только указанные, но и другие, явно не перечисленные элементы. Различные варианты осуществления описаны последовательно и для каждого из них выделены отличия от других вариантов осуществления. Одинаковые или аналогичные элементы в вариантах осуществления могут описываться путем перекрестной ссылки друг на друга. Для структур, продуктов и т.д., раскрытых в вариантах осуществления, если они соответствуют элементам, раскрытым в вариантах осуществления, дается только относительно простое описание с возможной отсылкой к описанию соответствующих этапов способа.
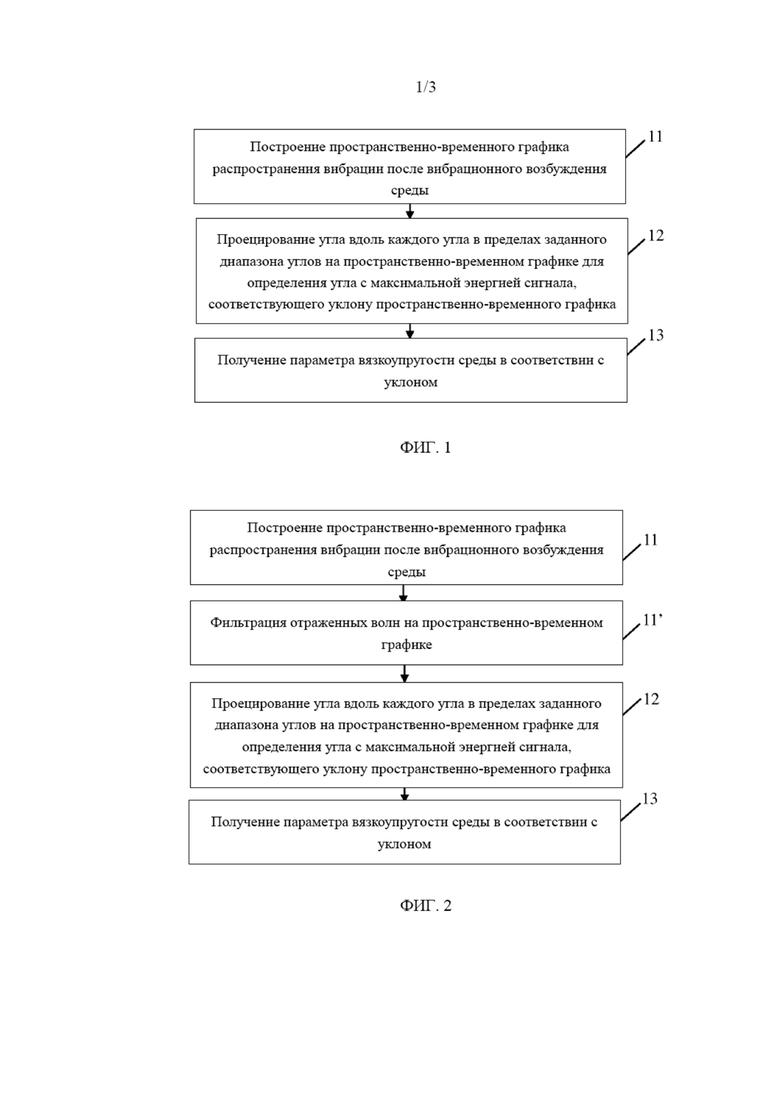
На фиг. 1 изображена блок-схема способа количественной оценки вязкоупругости среды в соответствии с одним из вариантов осуществления. Как показано на ФИГ. 1, способ содержит следующие этапы.
На этапе 11 выполняют построение пространственно-временного графика распространения вибрации после вибрационного возбуждения среды.
На этапе 12 выполняют проецирование угла вдоль каждого угла в пределах заданного диапазона углов на пространственно-временном графике с целью определения угла с максимальной энергией сигнала, соответствующего уклону пространственно-временного графика.
Заданный диапазон углов соответствует диапазону, выбранному для проецирования угла в соответствии с настоящей ситуацией. В дополнительном варианте осуществления заданный диапазон углов может быть равен 360 градусов, что, соответственно, требует проецирования полного угла. В следующем дополнительном варианте осуществления диапазон углов для проецирования угла выбирают в соответствии с характеристиками построенного пространственно-временного графика. На пространственно-временном графике, построенном на этапе 11, по горизонтальной оси отложено время, а по вертикальной оси – положение. Если вибрация распространяется в удаленное место только от начальной точки возбуждения колебаний, то при бесконечно большой скорости распространения ее характеристика будет близка к прямой линии, параллельной вертикальной оси на пространственно-временном графике, а при бесконечно малой скорости распространения – к прямой линии, параллельной горизонтальной оси на пространственно-временном графике. В данном случае достаточен предустановленный диапазон углов 90 градусов, позволяющий обойтись без полноугловой проекции и тем самым, повысить эффективность количественной оценки вязкоупругости среды. Если помимо распространения от начальной точки вибрационного возбуждения на определенное расстояние вибрация может продолжать распространяться и в противоположном направлении, то заданный диапазон углов может составлять 180 градусов. Что касается фактической начальной и конечной точки заданного диапазона углов, то при неизменности прямоугольной системы координат она будет связана с начальной точкой 0 градусов и направлением вращения против часовой стрелки или по часовой стрелке, которое можно выбирать по необходимости при условии, что предустановленный диапазон углов будет гарантирован.
Каждый угол представляет собой угол в заданном диапазоне углов, вдоль которого выполняется проецирование угла. Выбор угла определяется требованиями к точности измерения времени и скорости выполнения расчетов. Чем выше требования к точности измерения времени, тем выше требования к точности выбора угла; чем выше требования к скорости расчетов, тем ниже требования к точности выбора угла. Например, угол можно выбирать в диапазоне от 0,01 до 1 градуса.
Под проецированием угла понимают распознавание или извлечение элементов изображения на заданных углах с целью определения угла с максимальной энергией сигнала.
На этапе 13 получают параметр вязкоупругости среды в соответствии с уклоном.
Параметр вязкоупругости содержит, по меньшей мере, одну из следующих величин: параметр вязкости и параметр упругости.
Уклон пространственно-временного графика определяется расстоянием, на которое распространяется вибрация за единицу времени, то есть скоростью распространения вибрации в среде. В однородной среде скорость распространения вибрации определяется вязкоупругостью среды. После получения уклона пространственно-временного графика можно рассчитать количественное значение параметра вязкоупругости среды. Таким образом, эффективное и точное определение вышеуказанного уклона имеет ключевое значение для количественной оценки вязкоупругости среды. В настоящем варианте осуществления угол с максимальной энергией сигнала определяют с помощью проецирования угла. Так как угол с максимальной энергией сигнала соответствует уклону пространственно-временного графика, он эквивалентен определению уклона пространственно-временного графика. Использование этого способа не требует выбирать наибольшую, наименьшую или определенную фазу вибрации на пространственно-временном графике в качестве характерной точки для расчета уклона пространственно-временного графика. Способ не подвержен воздействию помех и характеризуется небольшой расчетной величиной. Это эффективный и точный способ количественной оценки вязкоупругости среды.
В одном из вариантов осуществления после возбуждения вибрации среды механическими колебаниями, акустическими импульсами или другими средствами, способными вызывать вибрацию, среда генерирует вибрацию, распространяющуюся в среде. В связи с ограниченной скоростью распространения вышеуказанной вибрации в среде можно использовать волну обнаружения для формирования изображения среды в реальном времени. Вышеупомянутая волна обнаружения может представлять собой световую, ультразвуковую или иную волну. Вышеуказанное изображение среды в реальном времени может быть одномерным, двухмерным или трехмерным.
Когда вышеуказанная вибрация распространяется в среде, ее фронт достигает различных положений вдоль направления распространения за разное время. Эхо-сигнал, генерируемый для визуализации среды волной обнаружения, подвергают фазовой декорреляции. Используя эту характеристику фазовой декорреляции, можно получать информацию о перемещении среды с помощью таких алгоритмов, как кросс-корреляция, самокорреляция и оптический поток. Пространственно-временной график можно построить вдоль заданного направления распространения вибрации. Вышеуказанные алгоритмы могут представлять собой различные методы, основанные на блочном или внеблочном сопоставлении. Под вышеупомянутым направлением распространения вибрации понимают фактическое направление распространения вибрации, когда вибрация распространяется только в одном направлении, и выбранное направление распространения, когда вибрация распространяется по нескольким направлениям. Например, если среда представляет собой однородный лист, то после вибрационного возбуждения среды вибрация будет распространяться в направлении расширения листа, и заданное направление распространения вибрации в это время будет совпадать с фактическим направлением распространения вибрации. В другом примере, когда в среде, имеющей неправильную пространственную форму, фронт распространения вибрации будет иметь трехмерную форму (например, форму эллипсоида), после чего различные пространственно-временные графики будут построены по различным направлениям распространения вибрации, и определенное направление распространения вибрации будет совпадать с исследуемым направлением распространения. Вышеупомянутое исследуемое направление распространения определяется в соответствии с фактически измеряемым направлением и может представлять собой, например, по меньшей мере, один из следующих вариантов: направление, в котором вибрация распространяется быстрее всего, направление, в котором вибрация распространяется медленнее всего, и направление, в котором скорость распространения вибрации находится в определенном диапазоне.
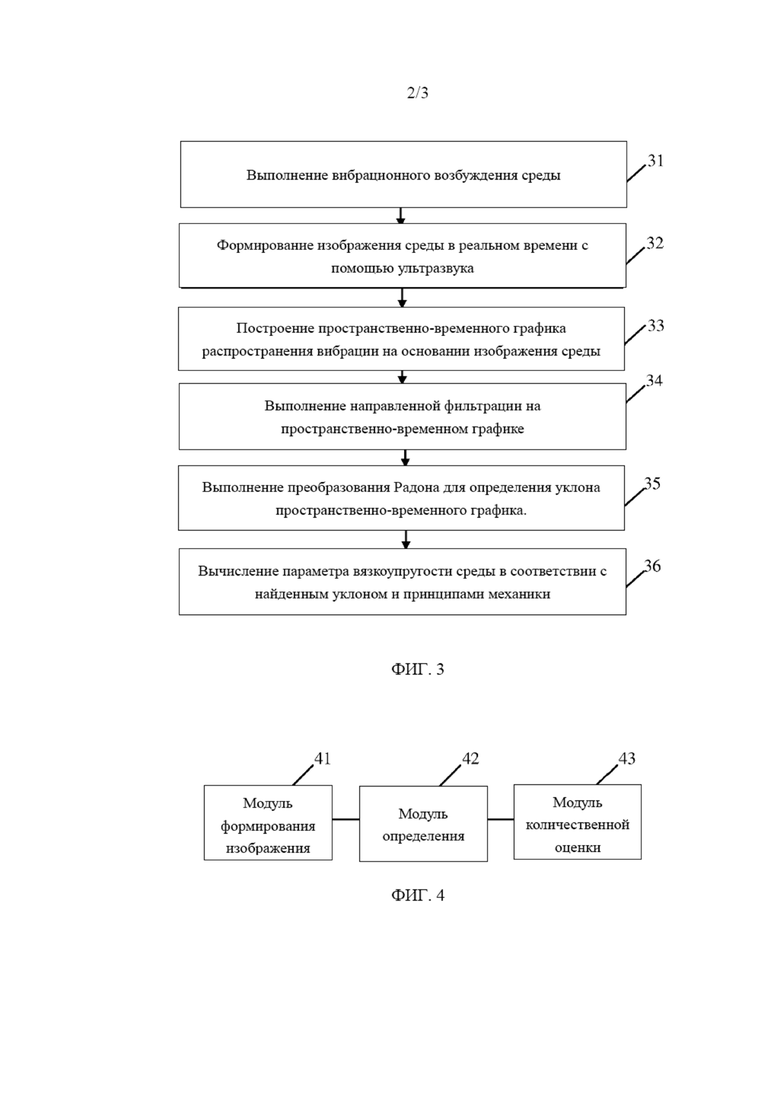
В одном из вариантов осуществления при распространении вибрации в среде формируются отраженные волны, обусловленные контактом вибрации с кромками или инородными телами. Для повышения точности последующей обработки, как показано на ФИГ. 2, перед проецированием угла способ может содержать этап 11’, то есть фильтрацию отраженной волны на пространственно-временном графике. Существует несколько способов фильтрации, и направленная фильтрация является одним из вариантов осуществления.
В одном из вариантов осуществления определение угла с максимальной энергией сигнала с помощью проецирования угла для получения уклона пространственно-временного графика может быть реализовано интегральным исчислением. Например, вычисление интегралов вдоль каждого угла в пределах заданного диапазона углов выполняют на пространственно-временном графике. Если интегральный угол соответствует направлению распространения колебаний, энергия накапливается, и значение интеграла, полученное в это время, является максимальным. После этого угол с максимальным значением интеграла определяют как угол уклона линии уклона пространственно-временного графика. Уклон линии уклона пространственно-временного графика можно определить в соответствии с найденным углом уклона и информацией о положении и времени. Вышеупомянутое вычисление интегралов также называют преобразованием Радона.
В одном из вариантов осуществления, поскольку функция текстуры изображения может быть получена путем вычисления полутоновой матрицы смежности и может отражать величину энергии сигнала, то полутоновую матрицу смежности можно использовать для получения информации об угле с максимальной энергией сигнала. Опираясь на вышеописанный принцип, определение угла с максимальной энергией сигнала с помощью проецирования угла для получения уклона пространственно-временного графика может быть реализовано вычислением полутоновой матрицы смежности. Например, на пространственно-временном графике полутоновую матрицу смежности сначала вычисляют вдоль каждого угла в пределах заданного диапазона углов. После этого полутоновую матрицу смежности используют для получения функции текстуры изображения каждого угла. После этого угол с максимальной энергией сигнала определяют как угол уклона линии уклона пространственно-временного графика с использованием функции текстуры изображения. Наконец, угол уклона определяют с использованием угла уклона.
Согласно принципам механики, вязкоупругость среды определяет скорость распространения вибрации в среде. Поэтому, зная уклон пространственно-временного графика, можно определить скорость распространения вибрации в среде. После этого, используя механический принцип, можно вывести количественное значение вязкоупругости среды. В данном случае параметр вязкоупругости может включать модуль сдвига, модуль Юнга, вязкоупругость при сдвиге, вязкость при сдвиге, механическое сопротивление, время механической релаксации, анизотропию и иные подобные величины.
Применение способа количественной оценки вязкоупругости среды в вариантах осуществления настоящего изобретения будет показано на конкретном примере.
При выполнении неразрушающего измерения вязкоупругости вязкоупругой среды, например, печени человека, необходимо количественно определять вязкоупругость среды. В состав испытательного устройства входит возбуждающее устройство и визуализирующее устройство, причем возбуждающее устройство производит вибрационное возбуждение исследуемой среды, а визуализирующее устройство использует ультразвук для визуализации среды после вибрационного возбуждения. Когда вибрация распространяется в среде, ее фронт достигает различных положений вдоль направления распространения за разное время, образуя пространственно-временной график. Вышеупомянутый фронт может представлять собой наибольшую, наименьшую или схожую фазу вибрации.
Как показано на ФИГ. 3, способ количественной оценки вязкоупругости среды в данном конкретном случае применения может включать следующие этапы.
На этапе 31 выполняют вибрационное возбуждение среды.
На этапе 32 формируют изображение среды в реальном времени с помощью ультразвука.
На этапе 33 строят пространственно-временной график распространения вибрации на основании изображения среды.
На этапе 34 выполняют направленную фильтрацию на пространственно-временном графике.
На этапе 35 выполняют преобразование Радона для определения уклона пространственно-временного графика.
На этапе 36 вычисляют параметр вязкоупругости среды в соответствии с найденным уклоном и принципами механики.
В различных примерах способа количественной оценки вязкоупругости среды при наличии, по меньшей мере, двух заданных направлений распространения вибрации строят один пространственно-временной график для каждого заданного направления распространения вибрации, после чего определяют параметр вязкоупругости среды, соответствующий пространственно-временному графику. Объединив, по меньшей мере, два полученных набора параметров вязкоупругости, можно более всесторонне оценить вязкоупругость среды.
Различные варианты способа количественной оценки вязкоупругости среды, описанные выше, могут быть при необходимости объединены, причем отношения сочетаний между различными вариантами осуществления в данном случае не ограничиваются.
На ФИГ. 4 изображена блок-схема устройства для количественной оценки вязкоупругости среды в соответствии с одним из вариантов осуществления. Устройство может быть размещено в узле управления устройства для измерения вязкоупругости среды, например, в случае медицинской техники, в узле управления прибора для неразрушающего измерения показателей печени. Устройство также может быть размещено в облаке, и измерения, выполненные прибором для измерения вязкоупругости среды, должны обрабатываться в облаке.
Устройство, изображенное на ФИГ. 4, содержит модуль 41 формирования изображения, модуль 42 определения и модуль 43 количественной оценки.
Модуль 41 формирования изображения выполнен с возможностью построения пространственно-временного графика распространения вибрации после вибрационного возбуждения среды.
Модуль 42 определения выполнен с возможностью проецирования угла вдоль каждого угла в пределах заданного диапазона углов на пространственно-временном графике с целью определения угла с максимальной энергией сигнала. Упомянутый выше угол с максимальной энергией сигнала соответствует уклону пространственно-временного графика.
Модуль 43 количественной оценки выполнен с возможностью получения параметра вязкоупругости среды в соответствии с уклоном пространственно-временного графика.
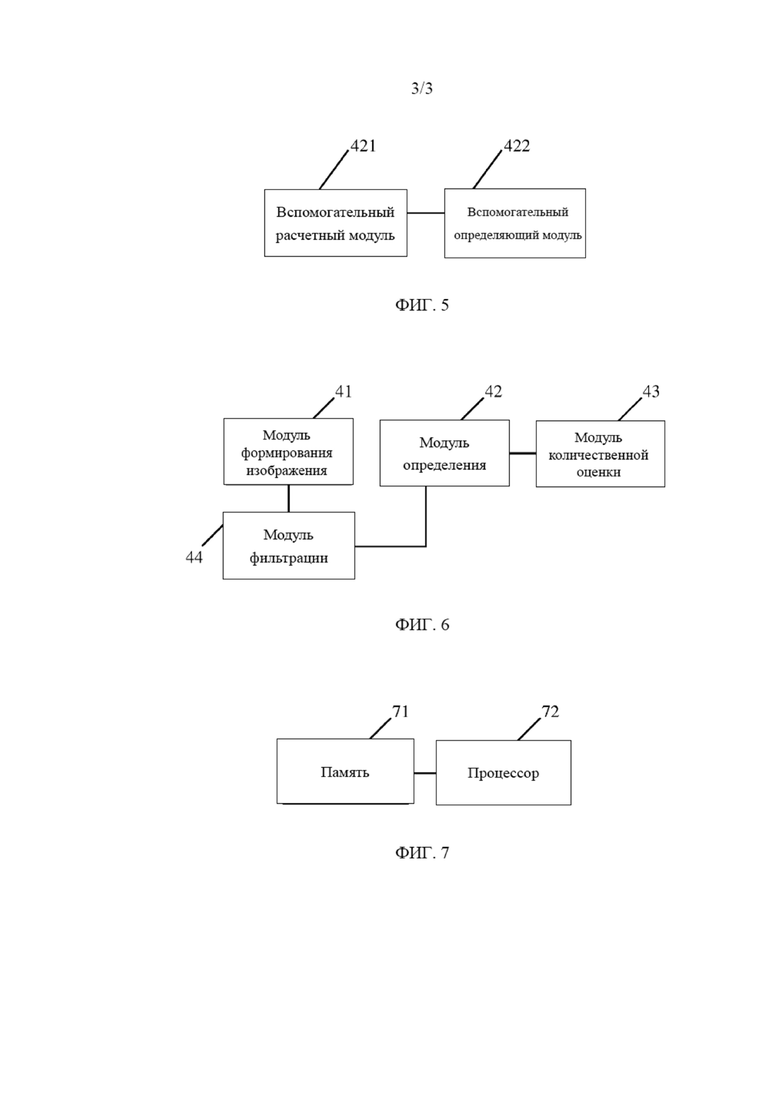
В одном из вариантов осуществления, показанном на ФИГ. 5, модуль 42 определения использует преобразование Радона для проецирования угла и определяет угол с максимальной энергией сигнала. При этом в состав модуля 42 определения входит вспомогательный расчетный модуль 421 и вспомогательный определяющий модуль 422.
Вспомогательный расчетный модуль 421 выполнен с возможностью вычисления интегралов вдоль каждого угла в пределах заданного диапазона углов на пространственно-временном графике.
Вспомогательный определяющий модуль 422 выполнен с возможностью определения угла с наибольшим значением интеграла, вычисленного вспомогательным расчетным модулем 421 как угол уклона линии пространственно-временного графика; и определения угла уклона линии уклона пространственно-временного графика с использованием угла уклона.
В дополнительном варианте осуществления, когда полутоновая матрица смежности используется для определения угла уклона, вспомогательный расчетный модуль 421 может быть выполнен с возможностью вычисления полутоновой матрицы смежности вдоль каждого угла в пределах заданного диапазона углов на пространственно-временном графике. Вспомогательный определяющий модуль 422 может быть выполнен с возможностью получения функции текстуры изображения каждого угла; определения угла с максимальной энергией сигнала в качестве угла уклона линии уклона пространственно-временного графика при помощи функции текстуры изображения; и определения уклона линии с использованием угла уклона.
В одном из вариантов осуществления, показанном на ФИГ. 6, устройство для количественной оценки вязкоупругости среды дополнительно содержит: модуль 44 фильтрации, выполненный с возможностью фильтрации отраженных волн на пространственно-временном графике до того, как модуль 42 определения выполнит проецирование угла.
В одном из вариантов осуществления модуль 41 формирования изображения строит пространственно-временной график распространения вибрации вдоль заданного направления распространения вибрации.
Применение устройства для количественной оценки вязкоупругости среды в вариантах осуществления настоящего изобретения показано на конкретном примере.
При выполнении неразрушающего измерения вязкоупругости вязкоупругой среды, например, печени человека, необходимо количественно определять вязкоупругость среды. В состав испытательного устройства входит возбуждающее устройство и визуализирующее устройство, причем возбуждающее устройство производит вибрационное возбуждение исследуемой среды, а визуализирующее устройство использует ультразвук для визуализации среды после вибрационного возбуждения.
Когда вибрация распространяется в среде, ее фронт достигает различных положений вдоль направления распространения за разное время, образуя пространственно-временной график. Вышеупомянутый фронт может представлять собой наибольшую, наименьшую или схожую фазу вибрации. Устройство для количественной оценки вязкоупругости среды строит пространственно-временной график распространения вибрации по изображению среды в заданном направлении распространения. После этого устройство для количественной оценки вязкоупругости среды вычисляет интегралы вдоль каждого угла на пространственно-временном графике и определяет угол с максимальным значением интеграла как угол уклона линии уклона пространственно-временного графика, после чего определяет уклон пространственно-временного графика. Наконец, устройство для количественной оценки вязкоупругости среды рассчитывает и получает параметр вязкоупругости среды в соответствии с найденным уклоном и принципами механики.
На фиг. 7 изображена блок-схема устройства для количественной оценки вязкоупругости среды в соответствии с одним из вариантов осуществления. Устройство может быть размещено в узле управления устройства для измерения вязкоупругости среды, например, в случае медицинской техники, в узле управления прибора для неразрушающего измерения показателей печени. Устройство также может быть размещено в облаке, и измерения, выполненные прибором для измерения вязкоупругости среды, должны обрабатываться в облаке.
Различные варианты осуществления устройства для количественной оценки вязкоупругости среды, описанные выше, могут быть при необходимости объединены, причем отношения сочетаний между различными вариантами осуществления в данном случае не ограничиваются.
Устройство, показанное на ФИГ. 7, содержит память 71 и процессор 72.
Память 71 содержит записанные инструкции по выполнению.
Процессор 72 выполнен с возможностью считывания инструкций по выполнению из памяти 71 и выполнения некоторых или всех этапов различных вариантов раскрытого выше способа количественной оценки вязкоупругости среды. Процессор 72 может быть реализован в виде чипа.
Если устройство для определения количественной вязкоупругости среды, показанное на ФИГ. 7, расположено в узле управления прибора для измерения вязкоупругости среды, то оно может быть подключено к возбуждающему и визуализирующему устройству в устройстве для количественной оценки вязкоупругости среды по шине, беспроводному каналу связи и т.д. При этом устройство оснащено интерфейсами для реализации вышеуказанных соединений и соответствующим механизмом связи.
Если устройство для количественной оценки вязкоупругости среды, показанное на ФИГ. 7, размещено в облаке, оно может взаимодействовать с прибором для измерения вязкоупругости среды через сеть.
Следует понимать, что настоящее изобретение не ограничивается раскрытым выше процессом или конструкцией, проиллюстрированной на сопровождающих чертежах; возможны различные модификации и изменения без отклонения от объема притязаний настоящего изобретения. Объем раскрытия ограничивается формулой изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ И УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ПАРАМЕТРА ВЯЗКОУПРУГОСТИ ВЯЗКОУПРУГОЙ СРЕДЫ | 2016 |
|
RU2688299C1 |
| ОСНОВАННЫЕ НА ПРИМЕНЕНИИ КОМПЬЮТЕРА ФОРМИРОВАНИЕ И ПРОВЕРКА ТРЕНИРОВОЧНЫХ ОБРАЗОВ, ПРЕДНАЗНАЧЕННЫХ ДЛЯ МНОГОТОЧЕЧНОГО ГЕОСТАТИСТИЧЕСКОГО АНАЛИЗА | 2006 |
|
RU2391686C2 |
| СПОСОБ ДЛЯ ИЗМЕРЕНИЯ ПАРАМЕТРА ЗАТУХАНИЯ УЛЬТРАЗВУКА МЕТОДОМ ГАРМОНИЧЕСКОЙ ЭЛАСТОГРАФИИ; ЗОНД И УСТРОЙСТВО ДЛЯ ОСУЩЕСТВЛЕНИЯ СПОСОБА | 2019 |
|
RU2786332C2 |
| СПОСОБ ГИБРИДНОЙ ЭЛАСТОГРАФИИ, ЗОНД И УСТРОЙСТВО ДЛЯ ГИБРИДНОЙ ЭЛАСТОГРАФИИ | 2019 |
|
RU2794039C2 |
| Способ контроля технического состояния механизмов | 2022 |
|
RU2798740C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ФОРМЫ СТОП И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1999 |
|
RU2177249C2 |
| Способ контроля состояния объектов | 2024 |
|
RU2823990C1 |
| СИСТЕМА И СПОСОБ ПРОЕЦИРОВАНИЯ НА ГЛАЗ | 2016 |
|
RU2728799C2 |
| СПОСОБ И СИСТЕМА ДЛЯ СОЗДАНИЯ ПРОСТРАНСТВЕННЫХ ИЗОБРАЖЕНИЙ | 2004 |
|
RU2323542C2 |
| ПРОЕКЦИЯ С ДВОЙНЫМ НАЛОЖЕНИЕМ | 2011 |
|
RU2575981C2 |
Группа изобретений относится к медицинской технике, а именно к способу количественной оценки вязкоупругости среды и двум вариантам устройства для количественной оценки вязкоупругости среды. Способ содержит следующие этап построения (11) пространственно-временного графика распространения вибрации после вибрационного возбуждения среды. Способ имеет этап проецирования (12) угла вдоль каждого угла в пределах заданного диапазона углов на пространственно-временном графике и определение уклона пространственно-временного графика, соответствующего углу с максимальной энергией сигнала. Определение уклона включает вычисление интегралов вдоль каждого угла в пределах заданного диапазона углов на пространственно-временном графике. Определение уклона имеет определение угла с наибольшим значением интеграла как угла уклона линии уклона пространственно-временного графика. Определение уклона включает определение уклона линии уклона с использованием угла уклона и получение (13) параметра вязкоупругости среды в соответствии с уклоном. В первом варианте устройство содержит модуль (41) формирования изображения, выполненный с возможностью построения пространственно-временного графика распространения вибрации после вибрационного возбуждения среды. Устройство имеет модуль (42) определения, выполненный с возможностью проецирования угла вдоль каждого угла в пределах заданного диапазона углов на пространственно-временном графике и определения уклона пространственно-временного графика, соответствующего углу с максимальной энергией сигнала, содержащий вспомогательный расчетный модуль (421), выполненный с возможностью вычисления интегралов на пространственно-временном графике вдоль каждого угла в пределах заданного диапазона углов. Устройство включает вспомогательный определяющий модуль (422), выполненный с возможностью определения угла с наибольшим значением интеграла, вычисленного вспомогательным расчетным модулем как угол уклона линии уклона пространственно-временного графика; и определения угла уклона линии уклона с использованием угла уклона. Устройство имеет модуль (43) количественной оценки, выполненный с возможностью получения параметра вязкоупругости среды в соответствии с уклоном. Во втором варианте устройство содержит память (71), в которой хранятся инструкции по выполнению способа. Устройство имеет процессор (72), выполненный с возможностью считывания инструкций по выполнению построения пространственно-временного графика распространения вибрации после вибрационного возбуждения среды. Процессор (72) выполнен с возможностью считывания инструкций по выполнению проецирования угла вдоль каждого угла в пределах заданного диапазона углов на пространственно-временном графике и определение уклона пространственно-временного графика, соответствующего углу с максимальной энергией сигнала. Процессор (72) выполнен с возможностью получения параметра вязкоупругости среды в соответствии с уклоном. Техническим результатом является эффективная и точная реализация количественной оценки вязкоупругости среды. 3 н. и 7 з.п. ф-лы. 7 ил.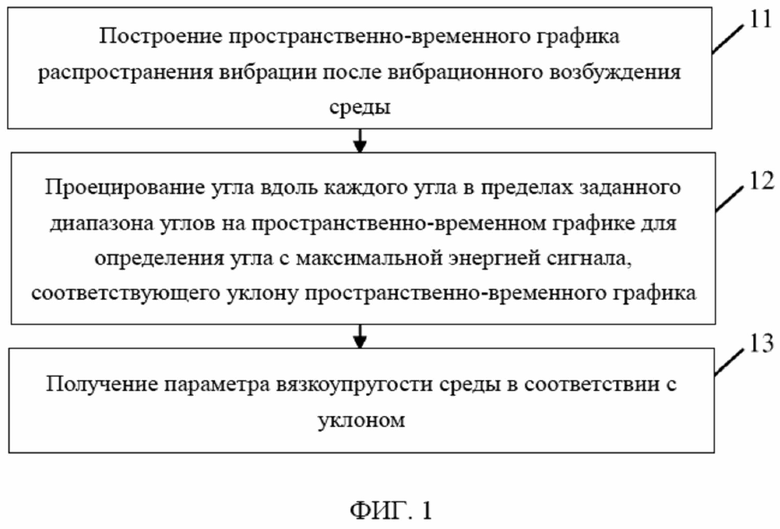
1. Способ количественной оценки вязкоупругости среды, содержащий следующие этапы:
построение (11) пространственно-временного графика распространения вибрации после вибрационного возбуждения среды;
проецирование (12) угла вдоль каждого угла в пределах заданного диапазона углов на пространственно-временном графике и определение уклона пространственно-временного графика, соответствующего углу с максимальной энергией сигнала, содержащие:
вычисление интегралов вдоль каждого угла в пределах заданного диапазона углов на пространственно-временном графике;
определение угла с наибольшим значением интеграла как угла уклона линии уклона пространственно-временного графика; и
определение уклона линии уклона с использованием угла уклона; и
получение (13) параметра вязкоупругости среды в соответствии с уклоном.
2. Способ по п. 1, в котором проецирование (12) угла вдоль каждого угла в пределах заданного диапазона углов на пространственно-временном графике для определения уклона пространственно-временного графика, соответствующего углу с максимальной энергией сигнала, содержит следующие операции:
вычисление полутоновой матрицы смежности вдоль каждого угла в пределах заданного диапазона углов на пространственно-временном графике;
получение текстуры изображения для каждого угла;
определение угла с максимальной энергией сигнала как угла уклона линии уклона пространственно-временного графика с использованием функции текстуры изображения; и
определение уклона линии уклона с использованием угла уклона.
3. Способ по одному из пп. 1 или 2, в котором способ дополнительно содержит следующую операцию:
фильтрация (11') отраженных волн на пространственно-временном графике перед проецированием (12) угла.
4. Способ по п. 3, в котором фильтрация (11') отраженных волн на пространственно-временном графике содержит следующую операцию:
выполнение (34) направленной фильтрации на пространственно-временном графике.
5. Способ по одному из пп. 1 или 2, в котором построение (11) пространственно-временного графика распространения вибрации содержит следующую операцию:
построение пространственно-временного графика распространения вибрации вдоль заданного направления распространения вибрации.
6. Устройство для количественной оценки вязкоупругости среды, содержащее:
модуль (41) формирования изображения, выполненный с возможностью построения пространственно-временного графика распространения вибрации после вибрационного возбуждения среды;
модуль (42) определения, выполненный с возможностью проецирования угла вдоль каждого угла в пределах заданного диапазона углов на пространственно-временном графике и определения уклона пространственно-временного графика, соответствующего углу с максимальной энергией сигнала, содержащий
вспомогательный расчетный модуль (421), выполненный с возможностью вычисления интегралов на пространственно-временном графике вдоль каждого угла в пределах заданного диапазона углов;
вспомогательный определяющий модуль (422), выполненный с возможностью определения угла с наибольшим значением интеграла, вычисленного вспомогательным расчетным модулем как угол уклона линии уклона пространственно-временного графика; и определения угла уклона линии уклона с использованием угла уклона; и
модуль (43) количественной оценки, выполненный с возможностью получения параметра вязкоупругости среды в соответствии с уклоном.
7. Устройство по п. 6, в котором модуль (42) определения содержит:
вспомогательный расчетный модуль (421), выполненный с возможностью вычисления полутоновой матрицы смежности вдоль каждого угла в пределах заданного диапазона углов на пространственно-временном графике;
вспомогательный определяющий модуль (422), выполненный с возможностью получения функции текстуры изображения каждого угла; определения угла с максимальной энергией сигнала в качестве угла уклона линии уклона пространственно-временного графика при помощи функции текстуры изображения; и определения уклона линии уклона с использованием угла уклона.
8. Устройство по одному из пп. 6 или 7, в котором устройство дополнительно содержит:
модуль (44) фильтрации, выполненный с возможностью фильтрации отраженных волн на пространственно-временном графике перед проецированием угла.
9. Устройство по одному из пп. 7 или 8, в котором модуль (41) формирования изображения строит пространственно-временной график распространения вибрации вдоль заданного направления распространения вибрации.
10. Устройство для количественной оценки вязкоупругости среды, содержащее:
память (71), в которой хранятся инструкции по выполнению способа по п. 1;
процессор (72), выполненный с возможностью считывания инструкций по выполнению следующих операций:
построение пространственно-временного графика распространения вибрации после вибрационного возбуждения среды;
проецирование угла вдоль каждого угла в пределах заданного диапазона углов на пространственно-временном графике и определение уклона пространственно-временного графика, соответствующего углу с максимальной энергией сигнала; и
получение параметра вязкоупругости среды в соответствии с уклоном.
| US20140296709 A1, 02.10.2014 | |||
| US20160262706 A1, 15.09.2016 | |||
| WO2017107660 A1, 29.06.2017 | |||
| US20150024473 A1, 22.01.2015 | |||
| СИСТЕМЫ И СПОСОБЫ МНОГОСТОРОННЕГО АНАЛИЗА | 2012 |
|
RU2627927C2 |

