Уровень техники
Регулирующие клапаны, применяемые против помпажа турбокомпрессора и в паровых турбинах часто могут оставаться в одном положении в течение продолжительных периодов времени. Если возникает необходимость в перемещении клапана, отклик клапана может значительно ухудшаться, или клапан может даже вообще не отреагировать. Это может происходить в связи с накоплением посторонних веществ между подвижными и неподвижными элементами клапана, что приводит к увеличенному трению или полному заклиниванию клапана. В некоторых случаях, при работе в постоянном положении, может развиваться неисправность исполнительного механизма клапана, которую не обнаружить до тех пор, пока не запрошено изменение положения.
Краткое описание чертежей
На фиг. 1 представлен схематический вид системы, в которой могут быть реализованы системы и способы, раскрытые в настоящей заявке.
На фиг. 2 представлена блок-схема процесса тестирования циклической работы клапана с использованием системной обратной связи согласно одному варианту осуществления, раскрытому в настоящей заявке.
На фиг. 3 представлена блок-схема процесса определения наличия стационарных условий до начала проверки в схеме технологического процесса по фиг. 2.
На фиг. 4 представлена блок-схема процесса активации частичного хода клапана в схеме процесса по фиг. 2.
На фиг. 5 представлена блок-схема процесса определения стабильности сигналов обратной связи от источника обратной связи в схеме технологического процесса по фиг. 3.
На фиг. 6 представлено изображение схемы для тестирования циклической работы клапана с использованием системной обратной связи согласно одному варианту осуществления.
На фиг. 7 представлено изображение схемы для идентификации стабильного условия с использованием системной обратной связи согласно одному варианту осуществления.
На фиг. 8 представлено изображение схемы для идентификации стабильного сигнала с использованием системной обратной связи согласно одному варианту осуществления.
На фиг. 9 представлена схема, иллюстрирующая примеры компонентов контроллера клапана в системе по фиг. 1.
Осуществление изобретения
В нижеследующем подробном описании дается ссылка на прилагаемые чертежи. Аналогичные ссылочные номера на различных чертежах могут обозначать одинаковые или аналогичные элементы.
Раскрытые в настоящей заявке системы и способы в целом относятся к автоматическому тестированию для регулирующих клапанов. В частности, системы и способы относятся к идентификации неявных отказов и деградации исполнительных механизмов регулирующих клапанов, таких как противопомпажные регулирующие клапаны и регулирующие клапаны паровых турбин.
Деградация клапанов вследствие нечастой циклической работы может быть не обнаружена до тех пор, пока не будет запрошено изменение положения клапана. Некоторые системы управления, такие как системы управления паровой турбиной, могут обеспечивать высокочастотный низкоамплитудный сигнал (именуемый дизерингом), суммирующийся с нормальным управляющим сигналом, что приводит к небольшим перемещениям клапана, не прерывающим функционирование системы. Для антипомпажных систем на данный момент не существует принятых средств диагностирования исполнительного механизма и износа клапана во время функционирования, за исключением ручной замены управляющего сигнала и последующей оценки отклика. Дизеринг может показать себя эффективным в предотвращении заклинивания клапана, но не предоставляет какую-либо информацию о деградации клапана или исполнительного механизма. Ручная оценка подвержена человеческому фактору и может привести к нарушению процесса или даже к производственным потерям.
Для увеличения надежности автоматической системы управления требуется диагностика автоматически управляемых исполнительных механизмов под нагрузкой. Это требование относится к исполнительным механизмам и соответствующим клапанам, функционирующим в течение длительных периодов в закрытом или открытом положении. Например, противопомпажные клапаны турбокомпрессора часто функционируют в полностью закрытом положении, а клапаны турбины часто функционируют в полностью открытом положении. Ранее диагностические тесты проводились посредством перемещения исполнительного механизма и последующей проверки результирующего перемещения в сигнале обратной связи положения исполнительного механизма. Однако некоторые исполнительные механизмы не оснащены аналоговыми или дискретными преобразователями положения. Раскрытые в настоящей заявке системы и способы предусматривают способ диагностики исполнительного механизма и связанного с ним клапана посредством отслеживания стационарных условий процесса в целом, включая турбомашинный узел, позволяющий диагностировать исполнительные механизмы, не оснащенные аналоговыми или дискретными преобразователями положения.
Согласно раскрытым в настоящей заявке вариантам осуществления, команда частичного хода может генерироваться только во время стационарных условий, а сигналы обратной связи, такие как технологического процесса и давления, в дополнение к обратной связи положения клапана, используются для оценки отклика клапана. В одном варианте осуществления, контроллер клапана подтверждает стационарные условия для системы турбокомпрессора, которые включают в себя регулирующий клапан, находящийся в первом положении, и подает на исполнительный механизм регулирующего клапана сигнал для инициирования частичного хода регулирующего клапана для перемещения из первого положения. Контроллер клапана принимает сигналы обратной связи от датчиков в системе турбокомпрессора и отслеживает сигналы обратной связи на предмет изменения относительно стационарных условий. Если в результате указанного отслеживания обнаружено изменение относительно стационарных условий в течение заранее заданного периода времени, контроллер клапана подает на исполнительный механизм сигнал для возвращения регулирующего клапана в первое положение. Если в результате отслеживания не обнаружено изменение относительно стационарных условий в течение заранее заданного периода времени, контроллер клапана генерирует сигнал неисправности.
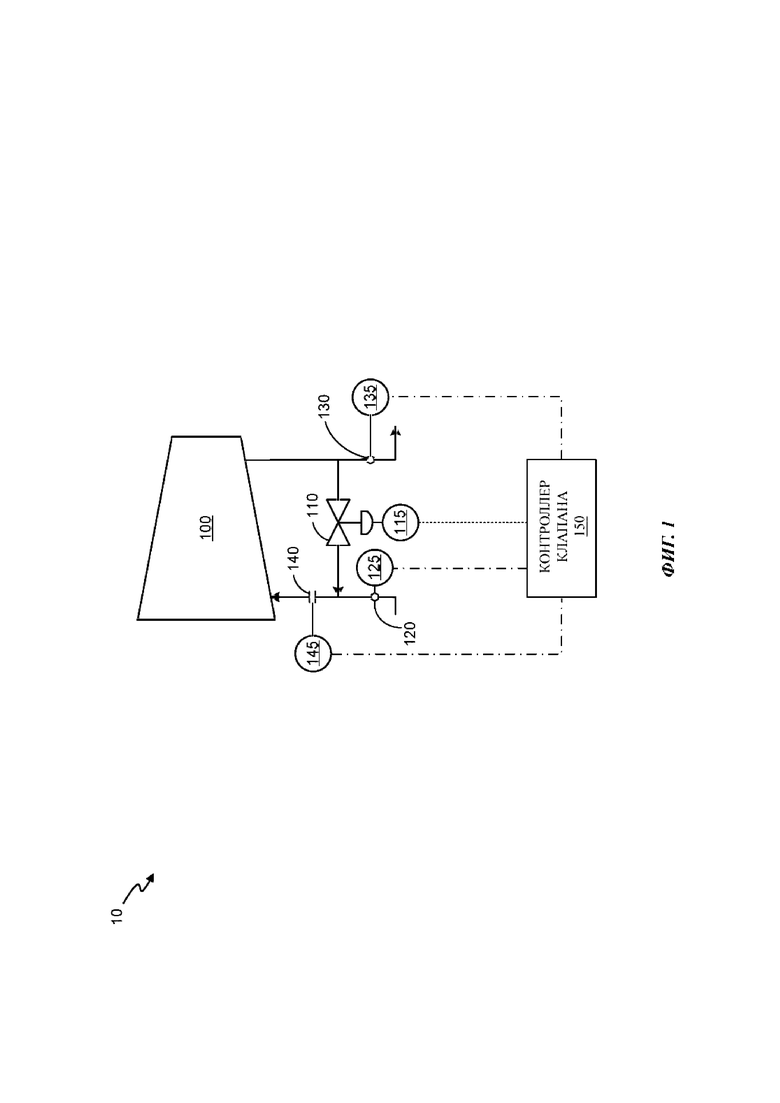
На фиг. 1 представлена схема системы 10 турбокомпрессора, в которой могут быть реализованы раскрытые в настоящей заявке системы и способы. Как показано на фиг. 1, система 10 содержит компрессор 100 с противопомпажным клапаном 110, соединенным с исполнительным механизмом 115. Контроллер 150 посредством подачи сигнала на исполнительный механизм 115 может задавать положение клапана для противопомпажного клапана 110.
Обратная связь процесса для компрессора 100 может собираться от множества датчиков, включая датчик 120 давления всасывания, датчик 130 давления нагнетания и расходомер 140. Преобразователь 125 давления всасывания собирает данные от датчика 120 давления всасывания. Преобразователь 135 давления нагнетания собирает данные от датчика 130 давления нагнетания. Преобразователь 145 расхода собирает данные от расходомера 140. В одном варианте осуществления, исполнительный механизм 115 может предоставлять сигнал обратной связи положения. Сигналы от исполнительного механизма 115, преобразователя 125 давления всасывания, преобразователя 135 давления нагнетания и преобразователя 145 расхода могут быть отправлены к контроллеру 150 клапана. Контроллер 150 клапана может анализировать сигналы от исполнительного механизма 115, преобразователя 125 давления всасывания, преобразователя 135 давления нагнетания и преобразователя 145 расхода и вычислять характеристики (отклик) замкнутого контура, например, в ответ на определение положения для противопомпажного клапана 110.
При нормальных условиях функционирования компрессора 100, противопомпажный клапан 110 может оставаться в одном и том же положении (например, закрытом) в течение длительного периода времени. Таким образом, согласно раскрытым в настоящей заявке вариантам осуществления, контроллер 150 клапана может выполнять периодическое или инициируемое вручную тестирование для подтверждения того, что противопомпажный клапан 110 и исполнительный механизм 115 остаются функционирующими. Как раскрыто далее, контроллер 150 клапана может подтверждать стационарные условия функционирования для системы 10 до генерирования команд частичного хода для исполнительного механизма 115. Команды частичного хода могут вызывать минимальное перемещение клапана для минимизации нарушения работы системы 10, но должны приводить к изменению относительно стационарного состояния, если противопомпажный клапан 110 и исполнительный механизм 115 функционируют надлежащим образом. Если нет изменений стационарных условий после команды частичного хода (например, определенных с помощью обратной связи от исполнительного механизма 115, преобразователя 125 давления всасывания, преобразователя 135 давления нагнетания и преобразователя 145 расхода), контроллер 150 клапана может генерировать сигнал неисправности, оповещающий о том, что противопомпажный клапан 110 и/или исполнительный механизм 115 не функционируют надлежащим образом.
На фиг. 2-5 представлены блок-схемы процесса 200 тестирования циклической работы клапана с использованием системной обратной связи согласно одному варианту осуществления. Для упрощения делается ссылка на конкретную конфигурацию по фиг. 1. Однако блок-схемы по фиг. 2-5 могут быть применены к другим конфигурациям клапанов или датчиков в системе 10 турбокомпрессора. Например, вместо противопомпажного клапана 110, раскрытия в настоящей заявке также могут быть применены к клапанам турбин или соответствующим датчикам.
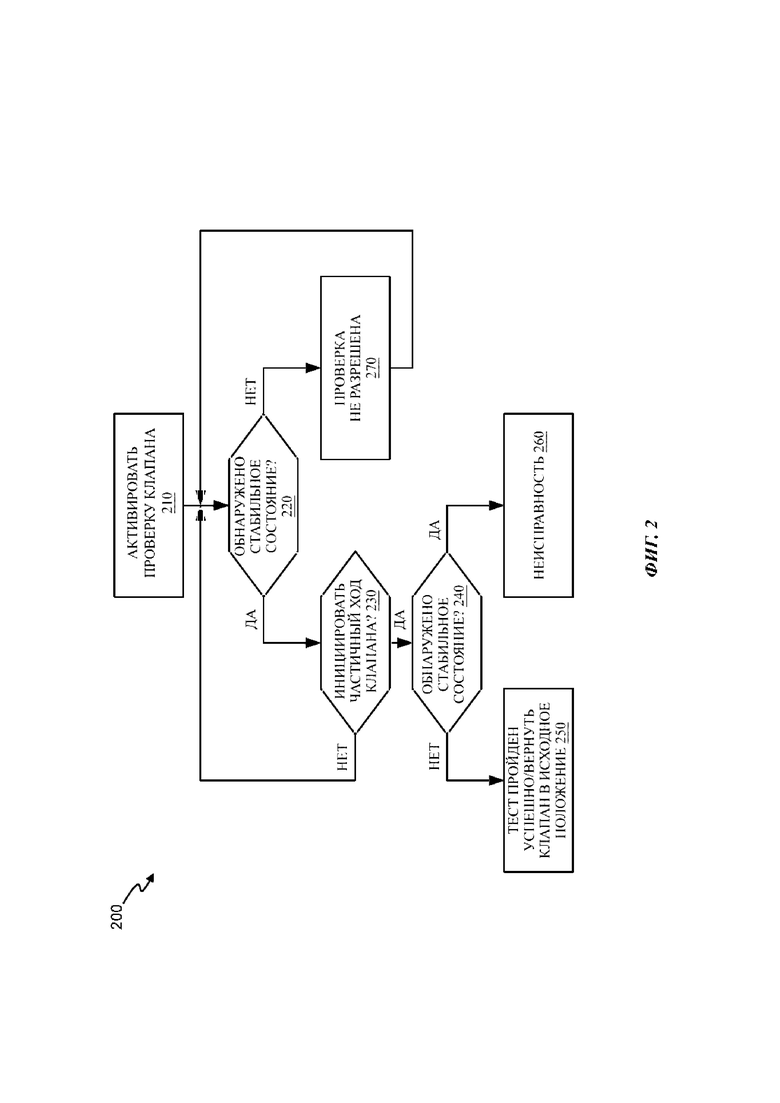
Процесс 200 может включать в себя активацию проверки клапана (блок 210) и определение наличия стационарных условий (блок 220). Например, контроллер 150 клапана может принимать входные данные пользователя, такие как команда запуска, или может быть запрограммирован на запланированное периодическое тестирование клапана 110. В качестве предварительного условия для проведения теста клапана, контроллер 150 клапана может идентифицировать стационарные условия для соответствующей части системы 10. В одном варианте осуществления, при определении стационарных условий могут использовать множество сигналов от преобразователя 125 давления всасывания, преобразователя 135 давления нагнетания и преобразователя 145 расхода. Например, контроллер 150 клапана может вычислять отфильтрованные по времени производные каждого сигнала, используя фильтр первого порядка. Использование нескольких фильтров с разными постоянными времени позволяет достоверно обнаруживать изменения сигнала, происходящие с разными скоростями. Таким образом, контроллер 150 клапана может идентифицировать относительно быстрые изменения, а также относительно медленные изменения в условиях функционирования системы 10. В одном варианте осуществления, для фильтрования производных среди целого диапазона интересующих частот может быть применено множество временных фильтров первого порядка (например, до пяти временных фильтров). Идентификация стационарных условий раскрыта более подробно ниже со ссылкой на фиг. 3.
Если обнаружены стационарные условия (блок 220 - да), процесс 200 может дополнительно включать в себя определение необходимости инициирования частичного хода клапана (блок 230). Например, контроллер 150 клапана может определять, наступил ли периодический интервал для тестирования, или обнаружена ли ручная активация. Если частичный ход клапана не следует инициировать (блок 230 - нет), процесс 200 может вернуться к блоку 220 для продолжения отслеживания стационарных условий.
Если частичный ход клапана следует инициировать (блок 230 - да), может быть определено, есть ли изменение относительно стационарных условий (блок 240). Например, когда обнаружены стабильные условия, контроллер 150 клапана может подавать на исполнительный механизм 115 конфигурируемый сигнал частичного хода для изменения положения клапана 110. Сигнал частичного хода может задавать, например, плавное, шаговое или многошаговое изменение положения для противопомпажного клапана 110. Конфигурации для сигнала частичного хода могут указывать максимально допустимое изменение положения, например, которое должно прервать стационарные условия без значительного влияния на рабочие характеристики системы 10 или их ухудшения. В сочетании с сигналом частичного хода, контроллер 150 клапана может отслеживать сигналы обратной связи (например, от исполнительного механизма 115, преобразователя 125 давления всасывания, преобразователя 135 давления нагнетания и преобразователя 145 расхода) для обнаружения изменения относительно стационарных условий в системе 10. Контроллер 150 клапана может отслеживать сигналы обратной связи непосредственно от исполнительного механизма 115, преобразователя 125 давления всасывания, преобразователя 135 давления нагнетания и преобразователя 145 расхода, или контроллер 150 клапана может отслеживать переменные, вычисляемые на основе одного или более сигнала из сигналов обратной связи.
Если стационарные условия больше не обнаруживают (блок 240 - нет), то тест проведен успешно и клапан может быть возвращен в его предыдущее положение (блок 250). Например, изменение стационарных условий подразумевает перемещение клапана 110, указывающее, что как клапан 110, так и исполнительный механизм 115 успешно выполнили инструкции частичного хода от контроллера 150 клапана. После обнаружения перемещения клапана 110 контроллер 150 клапана может подавать команду на исполнительный механизм 115 для возвращения клапана 110 в начальное стационарное положение.
Если стационарные условия все еще обнаруживают (блок 240 - да), генерируют сигнал неисправности для указания отсутствия перемещения клапана (блок 260). Например, если заранее установленный временной промежуток диагностики заканчивается без обнаружения контроллером 150 клапана изменения относительно стационарных условий, предполагается, что перемещение клапана 110 отсутствует. Контроллер 150 клапана может генерировать сигнал неисправности для указания, например, проблемы с клапаном 110 и/или исполнительным механизмом 115.
Вернемся к блоку 220, если стационарные условия после активации проверки клапана не обнаруживаются (блок 220 - нет), проверка клапана не разрешается (блок 270). Например, если контроллер 150 клапана отслеживает сигналы от преобразователя 125 давления всасывания, преобразователя 135 давления нагнетания и преобразователя 145 расхода (например, в течение настраиваемого периода времени) без идентификации стабильных условий, контроллер 150 клапана может не разрешить тестирование клапана и может продолжить отслеживание стационарных условий.
На фиг. 3 представлена блок-схема для определения того, есть ли стационарные условия в блоке 220 по фиг. 2, согласно одному варианту осуществления. Например, контроллер 150 клапана может отслеживать множество входных сигналов для определения наличия стационарного условия в системе 10 до инициирования проверки циклической работы клапана. Как представлено на фиг. 3, контроллер 150 клапана может определять то, принимают ли по меньшей мере один сигнал обратной связи (блок 300). Например, контроллер 150 клапана может идентифицировать, установлено ли соединение по меньшей мере с одним из преобразователя 125 давления всасывания, преобразователя 135 давления нагнетания или преобразователя 145 расхода. Если соединений нет (блок 300 -нет), блок 220 процесса может указывать, что стационарное состояние не может быть подтверждено (блок 350). Если есть по меньшей мере один сигнал обратной связи (блок 300 - да), могут быть подтверждены соединения и действующие сигналы для каждого источника обратной связи (блок 310). Например, контроллер 150 клапана может определять, принимают ли сигнал обратной связи от преобразователя 125 давления всасывания, преобразователя 135 давления нагнетания или преобразователя 145 расхода.
Если источник обратной связи подключен (блок 310 - да), может быть определено, является ли сигнал обратной связи от источника обратной связи стабильным (блок 320). Например, контроллер 150 клапана может вычислять множество отфильтрованных производных каждого сигнала обратной связи. Как было раскрыто выше, для каждого сигнала производная вычисляется как разность между нефильтрованными и отфильтрованными значениями сигнала (называемыми отфильтрованными дифференциалами), с использованием фильтра времени первого порядка. Использование фильтров с разными постоянными времени позволяет обнаруживать быстрые или медленные изменения с одинаковой чувствительностью. Контроллер 150 клапана может сравнивать отфильтрованные дифференциалы с пороговым значением (например, минимальным значением изменения, требуемым для индикации отклонения) для определения того, являются ли значения стабильными.
Если сигналы обратной связи от источников обратной связи стабильны (блок 320 - да), может быть определено, требуется ли оценка большего количества источников обратной связи (блок 330). Например, контроллер 150 клапана может определять, были ли оценены сигналы от всех релевантных источников ввода (например, преобразователя 125 давления всасывания, преобразователя 135 давления нагнетания, преобразователя 145 расхода и т.д.) для идентификации стабильных условий.
Если не требуется оценка большего количества источников обратной связи (блок 330 - нет), могут быть подтверждены стационарные условия (блок 340). Например, если контроллер 150 клапана определяет, что все входные сигналы от преобразователя 125 давления всасывания, преобразователя 135 давления нагнетания или преобразователя 145 расхода во время измеренных интервалов времени стабильны, контроллер 150 клапана может подтвердить наличие стационарных условий. Если в оценке участвуют большее число источников обратной связи (блок 330 - да), процесс 220 может вернуться к блоку 310 и повторяться для следующего источника обратной связи.
Если сигналы обратной связи от источника обратной связи не стабильны (блок 320 - нет), стационарные условия не могут быть подтверждены (блок 350). Например, когда сигналы обратной связи от преобразователя 125 давления всасывания, преобразователя 135 давления нагнетания или преобразователя 145 расхода нестабильны, контроллер 150 клапана может указать нестационарные условия. Таким образом, в одном варианте осуществления, где отсутствуют данные от одного источника обратной связи, процесс 220 может полагаться на один или более из других подключенных источников обратной связи для обнаружения стационарных условий (например, вместо отказа в подтверждении стационарных условий в связи с ограниченными данными).
Хотя блок-схема на фиг. 3 представлена в качестве последовательного набора блоков, в других вариантах осуществления блоки могут быть выполнены параллельно. Например, сигналы обратной связи от преобразователя 125 давления всасывания, преобразователя 135 давления нагнетания и преобразователя 145 расхода могут оценивать одновременно в течение каждого интервала времени фильтра.
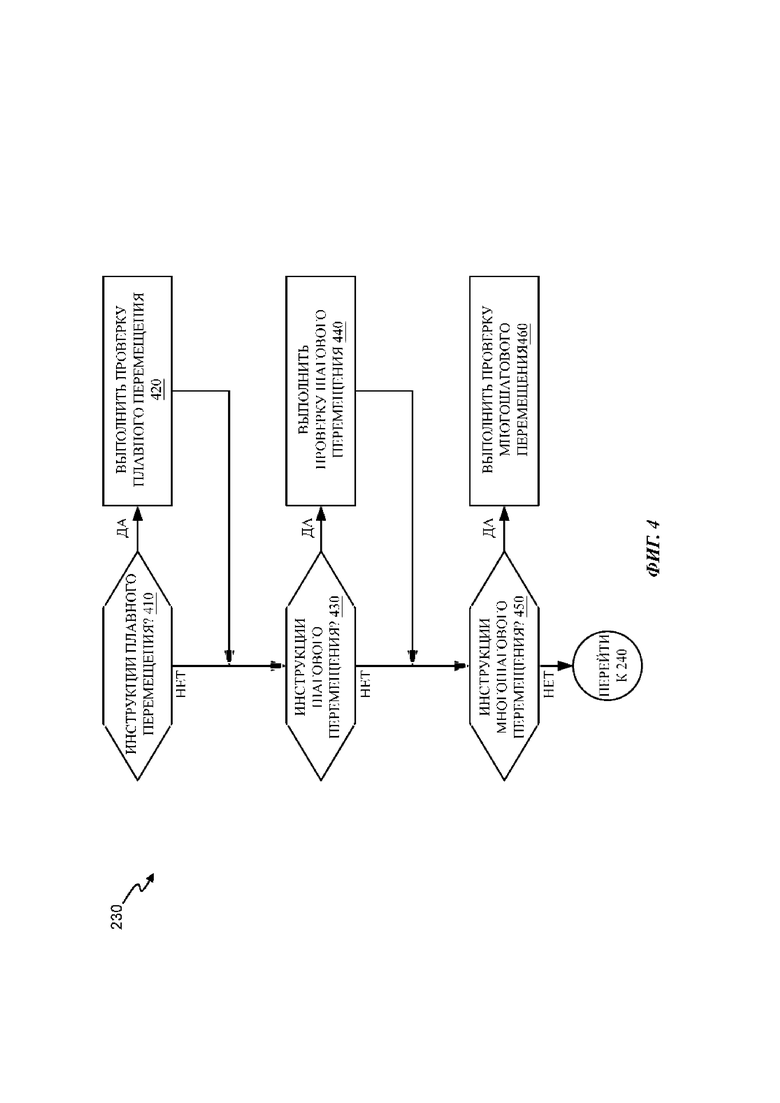
На фиг. 4 представлена блок-схема активации частичного хода клапана в блоке 230 по фиг. 2, согласно варианту осуществления. Например, контроллер 150 клапана может быть снабжен инструкциями для инициирования одного или более типов перемещения клапана для тестирования клапана 110 и исполнительного механизма 115. Как показано на фиг. 4, может быть определено, есть ли инструкции плавного перемещения для тестирования клапана (блок 410). Например, контроллер 150 клапана может быть выполнен с возможностью инициирования частичного хода клапана на настроенное расстояние в течение настроенного интервала времени (например, со скоростью плавного перемещения). В одном варианте осуществления, настроенное расстояние перемещения клапана может соответствовать максимально допустимому расстоянию, которое настроено на прерывание стационарных условий без отключения системы 10 или отрицательного влияния на функционирование системы 10.
Если есть инструкции плавного перемещения для тестирования клапана (блок 410 - да), контроллер 150 клапана может выполнить проверку плавного перемещения для регулирующего клапана 110 (блок 420). Например, контроллер 150 клапана может подавать сигнал на исполнительный механизм 115 клапана для перемещения регулирующего клапана 110 из измеренного стационарного положения к целевому положению с конкретной скоростью. Если исполнительный механизм 115 завершает частичный ход до целевого положения, контроллер 150 клапана может подавать сигнал на исполнительный механизм 115 для возвращения регулирующего клапана 110 в начальное стационарное положение.
Если нет инструкций плавного перемещения для тестирования клапана (блок 410 - нет) или после исполнения проверки плавного перемещения (блок 420), может быть определено, есть ли инструкции шагового перемещения для тестирования клапана (блок 430). Например, контроллер 150 клапана может быть выполнен с возможностью инициирования частичного хода клапана на настроенное расстояние (например, величину шага). В одном варианте осуществления, настроенная величина шага может соответствовать максимально допустимому перемещению клапана, настроенному на прерывание стационарных условий без отключения системы 10.
Если есть инструкции шагового перемещения для тестирования клапана (блок 430 - да), контроллер 150 клапана может исполнять проверку шагового перемещения для регулирующего клапана 110 (блок 440). Например, контроллер 150 клапана может подавать сигнал на исполнительный механизм 115 для перемещения регулирующего клапана 110 из измеренного стационарного положения в целевое положение. После того, как исполнительный механизм 115 завершает частичный ход с настроенной величиной шага, контроллер 150 клапана может подавать сигнал на исполнительный механизм 115 для возвращения регулирующего клапана 110 в начальное стационарное положение.
Если нет инструкций шагового перемещения для тестирования клапана (блок 430 - нет) или после исполнения проверки шагового перемещения (блок 440), может быть определено, есть ли инструкции многошагового перемещения для тестирования клапана (блок 450). Например, контроллер 150 клапана может быть выполнен с возможностью инициирования частичного хода клапана с множеством шагов в дискретные периоды времени до максимального расстояния перемещения клапана.
Если есть инструкции многошагового перемещения для тестирования клапана (блок 450 - да), контроллер 150 клапана может исполнять проверку многошагового перемещения для регулирующего клапана 110 (блок 460). Например, контроллер 150 клапана может подавать сигнал на исполнительный механизм 115 клапана для перемещения регулирующего клапана 110 из измеренного стационарного положения в целевое положение в виде последовательности меньших приращений. В одном варианте осуществления настроенная величина шага для каждого из множества шагов может быть частью максимально допустимого перемещения клапана, настроенного на прерывание стационарных условий без отключения системы 10. Например, если максимально допустимое перемещение клапана для проверки регулирующего клапана равно десятипроцентному перемещению (например, от 100% открытого до 90% открытого, или от 100% закрытого до 90% закрытого), величина шага многошагового перемещения может быть равна двум процентам, а число шагов может быть равно пяти. Интервал времени между каждым из шагов может быть настроен для обеспечения возможности измерения дифференциала обратной связи (например, от любого из преобразователя 125 давления всасывания, преобразователя 135 давления нагнетания или преобразователя 145 расхода).
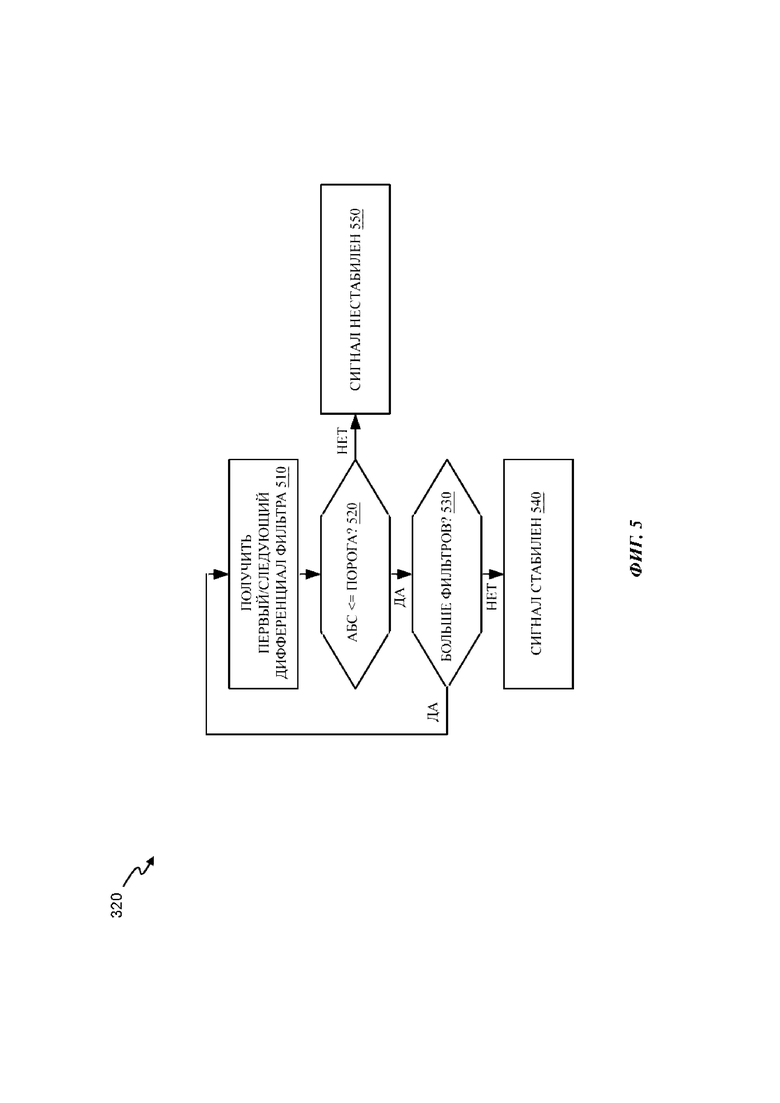
Блок 320 по фиг. 3 может включать в себя блоки, представленные на фиг. 5, согласно одному варианту осуществления. Как показано на фиг. 5, блок 320 может включать в себя получение дифференциала (блок 510) и сравнение абсолютного значения производной с порогом (блок 520). Например, контроллер 150 клапана может принимать входной сигнал от одного из преобразователя 125 давления всасывания, преобразователя 135 давления нагнетания или преобразователя 145 расхода. Контроллер 150 клапана вычисляет производную сигнала, используя фильтр первого порядка. Абсолютное значение производной могут сравнивать с пороговым значением. Пороговое значение может указывать максимально допустимое изменение относительно стационарного условия (или, альтернативно, минимальное значение изменения, требуемого для индикации отклонения). Пороговое значение может включать в себя, например, процентное изменение или скорость изменения для конкретного показания датчика (например, давления всасывания, давления нагнетания или расхода).
Если абсолютное значение производной больше порога (блок 520 - нет), может быть определено, что сигнал нестабилен (блок 550). В одном варианте осуществления, после первого случая идентификации нестабильного сигнала, не нужно вычислять/сравнивать дополнительные сигналы.
Если абсолютное значение дифференциала меньше или равно порогу (блок 520 - да), может быть определено, доступно ли большее количество фильтров для сигнала (блок 530). Например, контроллер 150 клапана может определить, что абсолютное значение отфильтрованного сигнала меньше порогового значения изменения и может определить, были ли применены к сигналу обратной связи другие постоянные времени из установленного количества постоянных времени, сконфигурированных для данного процесса. Использование фильтров с разными постоянными времени позволяет достоверно измерять изменения сигнала, происходящие с разной частотой. Таким образом, могут быть идентифицированы быстрые изменения, а так же медленные изменения, происходящие вследствие перемещения регулирующего клапана 110. В одном варианте осуществления, для измерения производных во всем интересующем диапазоне частотного спектра могут применять до пяти фильтров.
Если для сигнала доступно больше фильтров (блок 530 - да), контроллер 150 клапана может вернуться к блоку 510 и продолжить применять фильтр с разными постоянными времени к сигналу обратной связи. Если нет больше доступных для применения фильтров, сигнал можно считать стабильным (блок 540). Например, если абсолютное значение производной сигнала от преобразователя 125 давления всасывания ниже порогового значения для всех применимых постоянных времени, сигнал можно считать стабильным.
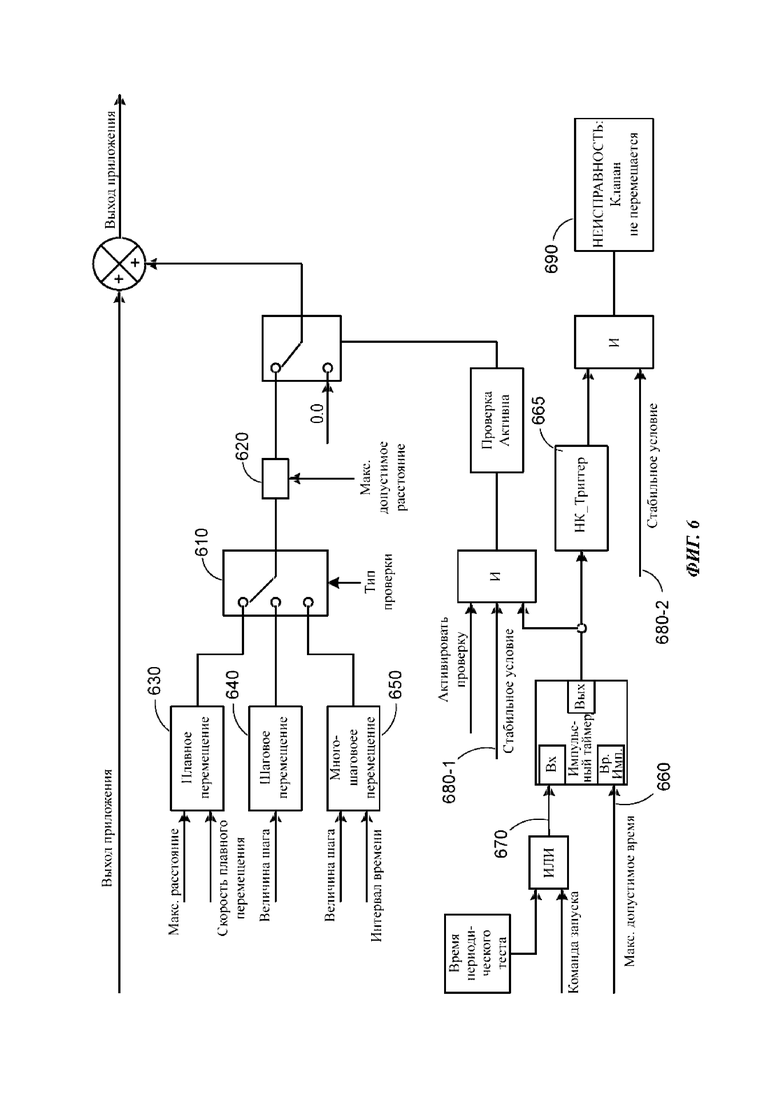
На фиг. 6 представлена схема для тестирования циклической работы клапана с использованием системной обратной связи согласно варианту осуществления. На фиг. 6, могут быть предоставлены входные данные пользователя для настройки типа 610 проверки, который может включать в себя одно или более из проверки плавного перемещения, шагового перемещения или многошагового перемещения, и максимально допустимого расстояния 620 перемещения клапана (например, регулирующего клапана 110) во время проверки. Входные данные пользователя могут дополнительно включать в себя настройки конфигурации для проверки 630 плавного перемещения, проверки 640 шагового перемещения и/или проверки 650 многошагового перемещения, в зависимости от настроек конфигурации для типа 610 проверки.
Настройки конфигурации для проверки 630 плавного перемещения могут включать в себя, например, целевое расстояние перемещения клапана (например, "макс, расстояние") и скорость плавного перемещения. Целевое расстояние перемещения клапана может соответствовать максимально допустимому расстоянию 620 или меньшему расстоянию. Скорость плавного перемещения может включать в себя время для достижения целевого расстояния перемещения клапана.
Настройки конфигурации для проверки 640 шагового перемещения могут включать в себя, например, величину шага для изменения положения клапана. Величина шага может соответствовать максимально допустимому расстоянию 620 или меньшему расстоянию.
Настройки конфигурации для проверки 650 многошагового перемещения могут включать в себя, например, величину шага для каждого из множества изменений положения клапана и интервал времени между каждым шагом. Величина шага может соответствовать расстоянию, меньшему, чем максимально допустимое расстояние 620, такое, как приращение максимально допустимого расстояния 620. Интервал времени может определять период времени между каждым шагом (например, для обеспечения возможности обнаружения изменения состояния). Во время проверки клапана, шаги в проверке 650 многошагового перемещения могут продолжаться последовательно до точки, в которой положение клапана для регулирующего клапана 110 достигает максимально допустимое расстояние 620 (например, если изменение в стационарных условиях не обнаружено).
Со ссылкой на фиг. 6, может быть введена настройка конфигурации для максимально допустимого времени 660 для завершения проверки клапана. Для инициирования проверки клапана для контроллера 150 клапана может быть принят сигнал 670 запуска. Сигнал 670 запуска может генерироваться, например, автоматически в соответствии с периодическим тестовым циклом или на основе ручной команды запуска.
Если проверка клапана активирована (например, принят сигнал 670 запуска) и обнаружены стабильные (например, стационарные) условия 680-1, контроллер 150 клапана может выполнить проверку клапана согласно настройкам 610-750 конфигурации. Обнаружение нестабильности в системе 10 (например, вызванной перемещением регулирующего клапана 110) будет пониматься, как надлежащее функционирование клапана. Если стабильные условия 680-2 продолжаются на протяжении максимально допустимого времени 660 (например, триггер 665 нижнего края), контроллер 150 клапана может подавать сигнал неисправности 690, обозначающий то, что тестирование не пройдено.
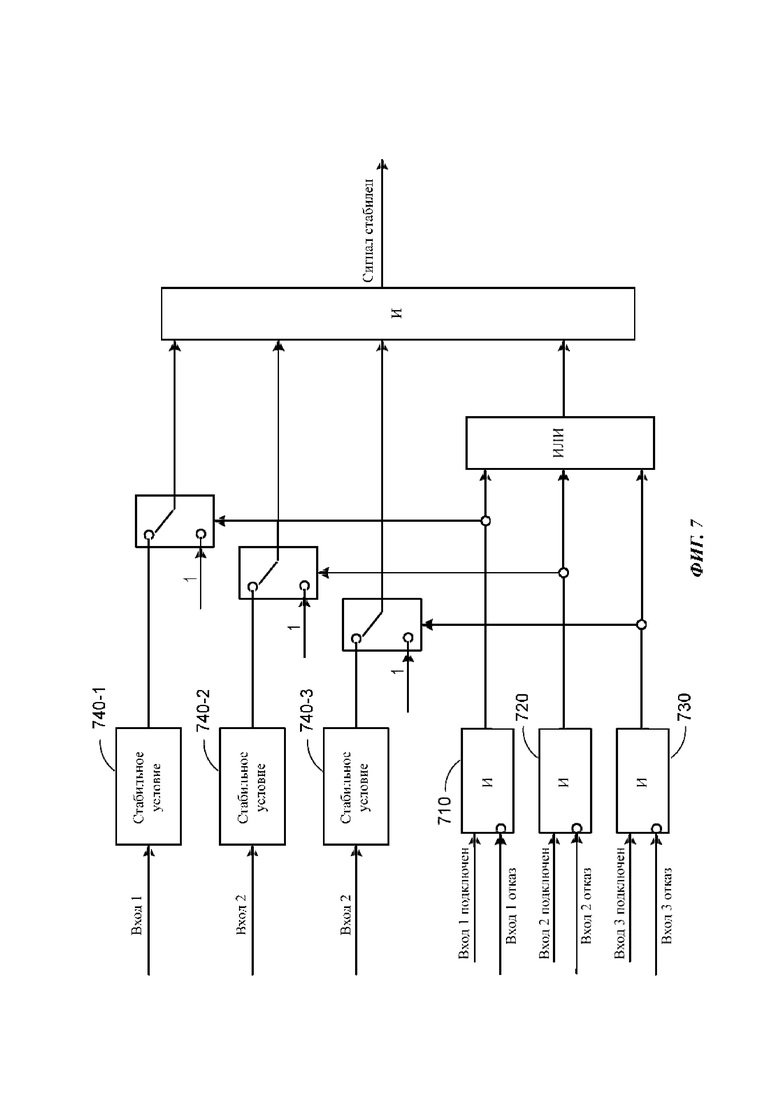
На фиг. 7 представлена схема идентификации стабильного условия с использованием системной обратной связи, согласно варианту осуществления. Представленная на фиг. 7 схема управления может быть реализована посредством контроллера 150 клапана. Показанное на фиг. 7 может соответствовать, например, входам 680-1/780-2 стабильного условия по фиг. 6. На фиг. 7, в блоках 710, 720 и 730 контроллер 150 клапана может подтвердить, что источники обратной связи (например, вход 1, вход 2 и вход 3) подключены и функционируют. Вход 1, вход 2 и вход 3 могут соответствовать, например, преобразователю 125 давления всасывания, преобразователю 135 давления нагнетания и преобразователю 145 расхода. В других вариантах осуществления могут использоваться разные источники обратной связи и/или разное количество источников обратной связи. Например, в другом варианте осуществления для идентификации стабильного условия может использоваться только один входной сигнал. В одном варианте осуществления, если в блоках 710, 720 или 730 определено, что нет принятых сигналов от одного или более из входа 1, входа 2 или входа 3, стабильные условия могут быть определены с использованием остальных действующих подключений обратной связи. Если от любого из входа 1, входа 2 или входа 3 не приняты сигналы, стабильные условия могут быть не определены.
Предположим, что сигналы от входа 1, входа 2 и входа 3 принимают, тогда тесты на стабильность сигнала от каждого из входа 1, входа 2 и входа 3 могут проводить в блоках 740-1, 740-2 и 740-3 (совместно называемых «тест 740 стабильности сигнала»). Тест 740 стабильности сигнала раскрыт более подробно ниже со ссылкой на фиг. 8. Если каждый из входа 1, входа 2 и входа 3 подключен и характеризуется стабильным сигналом, может быть определено, что система 10 находится в стабильном состоянии (например, как вход 680-1/или 680-2 по фиг. 6).
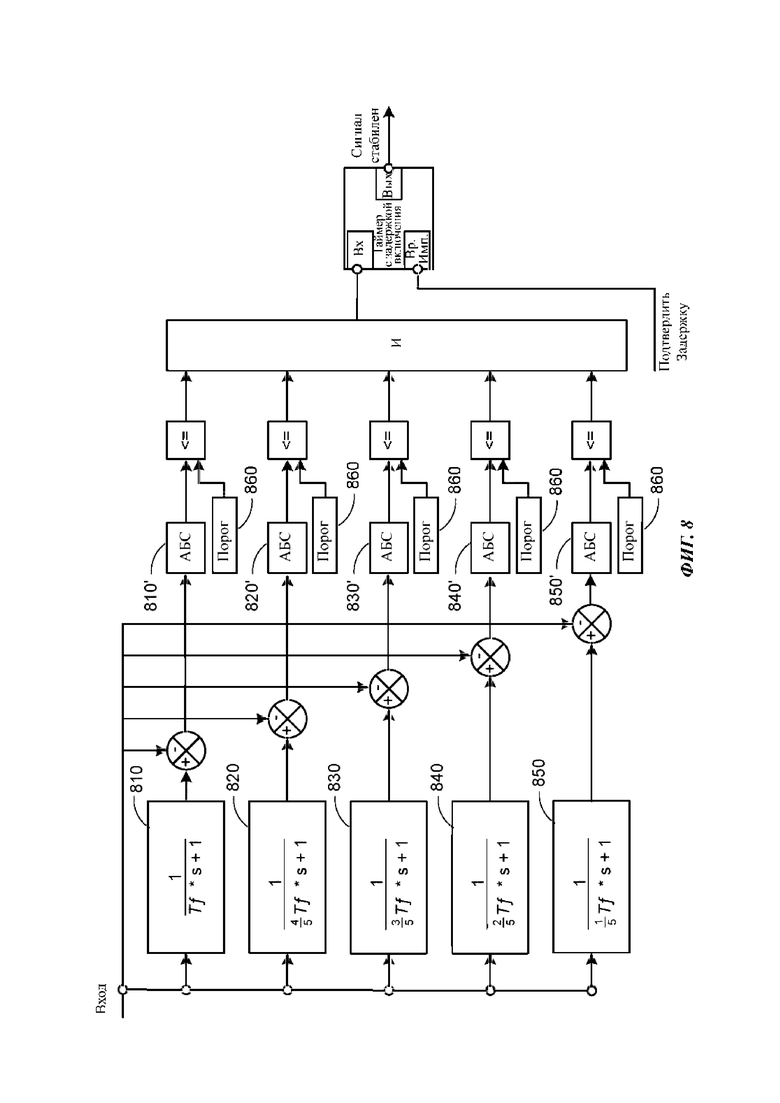
На фиг. 8 представлена схема идентификации стабильного сигнала с использованием системной обратной связи согласно варианту осуществления. Представленная на фиг. 7 схема управления может быть реализована посредством контроллера 150 клапана. Описание по фиг. 8 может соответствовать, например, тесту 740 стабильности сигнала по фиг. 7. На фиг. 8 контроллер 150 клапана может принимать входной сигнал (например, один из входа 1, входа 2 или входа 3) и вычислять производную сигнала с использованием фильтра 810 первого порядка. В одном варианте осуществления фильтр первого порядка является непрерывной во времени функцией преобразования, такой, как 1/(Тƒ*s+1), где Tƒ является постоянной времени, a s является оператором дифференцирования. Фильтр первого порядка может быть применен с различными постоянными времени в фильтрах 820, 830, 840 и 850, для идентификации относительно быстрых изменений, а также относительно медленных изменений в системе 9. Использование фильтров с разными постоянными времени обеспечивает возможность достоверного измерения изменений сигнала, происходящих с разной частотой. Хотя на фиг. 8 показано пять разных фильтров, в других вариантах осуществления могут использоваться меньшее или большее количество фильтров. Например, могут использоваться три фильтра, два фильтра или один фильтр.
Как дополнительно показано на фиг. 8, абсолютное значение (АБС) 810', 820', 830', 840', и 850' каждого отфильтрованного сигнала сравнивают с пороговым значением 860. Пороговое значение 860 может представлять минимальное значение изменения, требуемое для индикации отклонения относительно стационарного условия. Если все значения 810', 820', 830', 840', и 850' меньше или равны пороговому значению 860, сигнал считается стабильным. Если любое из значений 810', 820', 830', 840', или 850' больше порогового значения 860, сигнал считается нестабильным.
На фиг. 9 представлена схема, иллюстрирующая примерные физические компоненты контроллера 150 клапана. Контроллер 150 клапана может включать в себя шину 910, процессор 920, память 930, компонент 940 ввода, компонент 950 вывода и интерфейс 960 связи.
Шина 910 может включать в себя тракт, обеспечивающий возможность осуществления связи между компонентами контроллера 150 клапана. Процессор 920 может включать в себя процессор, микропроцессор или логическую схему обработки, которые могут интерпретировать и исполнять инструкции. Память 930 может включать в себя любой тип динамического запоминающего устройства, способного хранить информацию и инструкции (например, программное обеспечение 935), для исполнения процессором 920, и/или любой тип долговременного запоминающего устройства, способного хранить информацию для использования процессором 920.
Программное обеспечение 935 включает в себя приложение или программу, предоставляющую функцию и/или процесс. Программное обеспечение 935 также может включать в себя встроенную программу, промежуточное программное обеспечение, микрокод, язык описания аппаратного обеспечения (HDL, от англ. hardware description language), и/или любую форму инструкции.
Компонент 940 ввода может включать в себя механизм, обеспечивающий возможность пользователю вводить информацию в контроллер 150 клапана, такой как клавиатура, малая клавиатура, кнопка, переключатель, сенсорный экран и т.д. Компонент 950 вывода может включать в себя механизм, выводящий информацию пользователю, такой как дисплей, динамик, один или более светоизлучающих диодов (LED), и т.д.
Интерфейс 960 связи может включать в себя приемопередатчик, обеспечивающий возможность связи контроллера 150 клапана с другими устройствами и/или системами посредством беспроводной связи, проводной связи или комбинации беспроводной и проводной связи. Например, интерфейс 960 связи может включать в себя механизмы для связи с другим устройством или системой, такими как преобразователь 125 давления всасывания, преобразователь 135 давления нагнетания и преобразователь 145 расхода, через сеть, или с другими устройствами/системами, такими как системная управляющая вычислительная машина, отслеживающая работу множества систем 9 (например, в тепловой электростанции, или станции другого типа). В одном варианте осуществления интерфейс 960 связи может быть логическим компонентом, включающим в себя порты ввода и вывода, системы ввода и вывода и/или другие компоненты ввода и вывода, содействующие передаче данных к другим устройствам / от других устройств.
Контроллер 150 клапана может выполнять определенные операции в ответ на исполнение процессором 920 инструкций программного обеспечения (например, программного обеспечения 935), хранящихся в машиночитаемом носителе, таком как память 930. Машиночитаемый носитель может быть определен как долговременное запоминающее устройство. Долговременное запоминающее устройство может иметь объем памяти в одном физическом запоминающем устройстве, или во множестве физических запоминающих устройств. Инструкции программного обеспечения могут быть считаны в память 930 из другого машиночитаемого носителя или из другого устройства. Инструкции программного обеспечения, хранящиеся в памяти 930 могут побуждать процессор 920 выполнять процессы, раскрытые в настоящей заявке. Альтернативно, вместо или совместно с инструкциями программного обеспечения для осуществления процессов, раскрытых в настоящей заявке, может использоваться жестко смонтированная схема. Таким образом, раскрытые в настоящей заявке варианты осуществления не ограничены какой-либо конкретной комбинацией схемы аппаратного обеспечения и программного обеспечения.
Контроллер 150 клапана может включать в себя меньшее количество компонентов, дополнительные компоненты, иные компоненты и/или компоненты, расположенные иначе, чем представлено на фиг. 9. В качестве примера, в некоторых вариантах осуществления в контроллер 150 клапана может не быть включен дисплей. В таких ситуациях контроллер 150 клапана может быть консольным устройством, не включающим в себя компонент 940 ввода. В качестве другого примера, контроллер 150 клапана может включать в себя одну или более систем коммутации вместо или в дополнение к шине 910. Дополнительно или альтернативно, один или более компонентов контроллера 150 клапана могут выполнять одну или более задач, раскрытых как выполняемые одним или более компонентами контроллера 150 клапана.
Раскрытые в настоящей заявке системы и способы относятся к способу диагностики регулирующего клапана и исполнительного механизма посредством отслеживания стационарных условий комплексной системы, включающей в себя турбомашинный блок, обеспечивающему возможность диагностики исполнительных механизмов, даже если они не оснащены аналоговыми или дискретными преобразователями положения. Во время диагностического теста, автоматическая система управления посылает настраиваемый сигнал (плавного перемещения, шагового перемещения или многошагового перемещения), который должен привести к перемещению исполнительного механизма. Диагностический тест продолжается до тех пор, пока не будет обнаружено перемещение или пока заранее установленный промежуток времени не окончится. Когда обнаружено перемещение (например, стабильное условие больше не выполняется), диагностический тест заканчивается, и исполнительный механизм возвращает клапан в требуемое контрольное положение. Если заранее установленный промежуток времени диагностики заканчивается при наличии стабильного условия, это означает, что клапан не переместился, и генерируется сигнал неисправности. Таким образом, раскрытые в настоящей заявке системы и способы уменьшают количество прерываний работы клапана и требуемое для этого время и увеличивают надежность связанной с этим проверки клапана. Напротив, существующие способы диагностики требуют больших и более длительных прерываний работы, что обычно снижает надежность и может привести к производственным потерям.
Вышеизложенное описание примерных вариантов осуществления предоставляет иллюстрацию и описание, но не является исчерпывающим или ограничивающим варианты осуществления, раскрытые в настоящей заявке, до точной раскрытой формы. Возможны модификации и изменения с учетом вышеизложенного раскрытия, или они могут быть получены из практики применения вариантов осуществления.
Хотя изобретение было подробно раскрыто выше, вполне понятно, что для специалистов в релевантной области техники очевидно, что изобретение может быть изменено без отступления от идеи изобретения. Различные изменения формы, конструкции или расположения могут быть внесены в изобретение без отклонения от идеи и объема изобретения.
Ни один элемент, действие или инструкция, используемые в описании настоящей заявки, не должны истолковываться как критически важные или существенные для изобретения, если они явно не описаны как таковые. Также, в контексте настоящей заявки, указание формы единственного числа подразумевает включение одного или более элементов. Более того, выражение "на основе" может означать "по меньшей мере частично на основе", если явно не указано иное.
Использование порядковых терминов, таких как "первый", "второй", "третий" и т.д., в формуле изобретения для изменения элемента формулы изобретения само по себе не означает какого-либо преимущества, первоочередности или порядка одного элемента формулы изобретения над другим, временного порядка, в котором выполняются действия способа, временного порядка, в котором исполняются инструкции устройством и т.д., но используются только в качестве меток для различения одного элемента, имеющего определенное название, от другого элемента, имеющего то же название (за исключением использования порядкового термина) для различения элементов формулы изобретения.


Предложено автоматическое тестирование регулирующих клапанов для диагностики исполнительных механизмов, включая исполнительные механизмы, не оснащенные аналоговыми или дискретными преобразователями положения. Контроллер клапана подтверждает стационарные условия для системы турбокомпрессора, включающие в себя то, что регулирующий клапан находится в первом положении и подает на исполнительный механизм регулирующего клапана сигнал для инициирования частичного хода клапана для перемещения регулирующего клапана из первого положения. Контроллер клапана принимает сигналы обратной связи от датчиков в системе турбокомпрессора и отслеживает сигналы обратной связи на предмет изменения относительно стационарных условий. Отслеживание включает в себя: идентификацию установленного количества разных интервалов времени для применения; отслеживание дифференциала для сигналов обратной связи по каждому из указанных разных интервалов времени и сравнение производных, вычисленных посредством использования каждого из разных интервалов времени, со стационарным порогом. Если в ходе отслеживания обнаружено изменение стационарных условий в течение заданного периода времени, контроллер клапана подает на исполнительный механизм сигнал для возврата регулирующего клапана в первое положение. Если в ходе отслеживания не обнаружено изменение относительно стационарных условий в течение заданного периода времени, контроллер клапана генерирует сигнал неисправности. 3 н. и 17 з.п. ф-лы, 9 ил.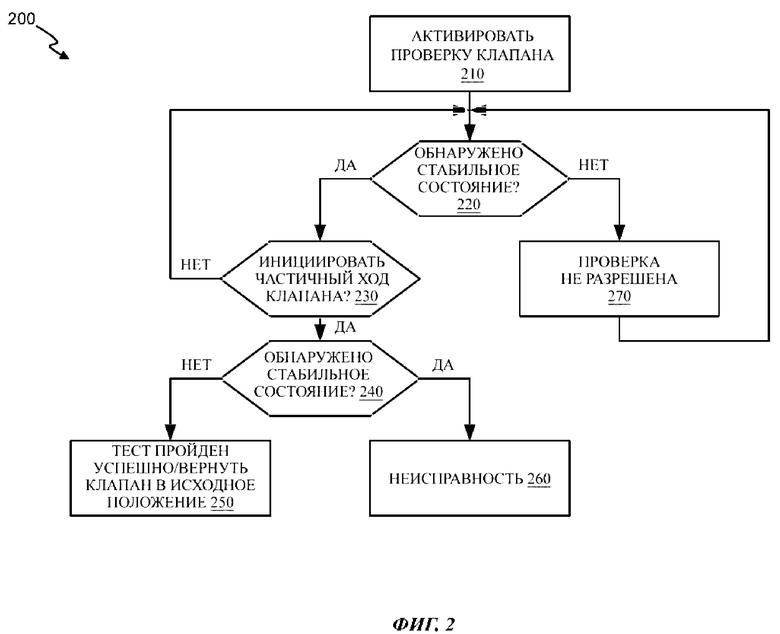
1. Способ проведения диагностического теста для регулирующего клапана, содержащий этапы, на которых:
посредством системы управления подтверждают стационарные условия для системы турбокомпрессора, включающие в себя то, что регулирующий клапан находится в первом положении;
посредством системы управления подают сигнал на исполнительный механизм регулирующего клапана для инициирования частичного хода клапана для перемещения регулирующего клапана из первого положения;
посредством системы управления и после подачи сигнала для инициирования частичного хода клапана принимают сигналы обратной связи от датчиков в системе турбокомпрессора;
посредством системы управления отслеживают сигналы обратной связи на предмет изменения относительно стационарных условий, причем указанное отслеживание включает в себя:
идентификацию установленного количества разных интервалов времени для применения;
отслеживание дифференциала для сигналов обратной связи по каждому из указанных разных интервалов времени
и сравнение производных, вычисленных посредством использования каждого из разных интервалов времени, со стационарным порогом;
посредством системы управления подают сигнал на исполнительный механизм для возвращения регулирующего клапана в первое положение в ответ на то, что во время указанного отслеживания обнаружено изменение относительно стационарных условий в течение одного из указанных разных интервалов времени;
и посредством системы управления генерируют сигнал неисправности в ответ на то, что во время указанного отслеживания не обнаружено изменение относительно стационарных условий в течение указанных разных интервалов времени.
2. Способ по п. 1, в котором подтверждение стационарных условий включает в себя прием множества сигналов обратной связи от разных источников.
3. Способ по п. 2, в котором множество сигналов обратной связи включает в себя сигналы от одного или более датчиков давления или от одного или более датчиков расхода или переменные, вычисляемые на основе одного или более из множества сигналов обратной связи.
4. Способ по п. 3, в котором множество сигналов обратной связи дополнительно включает в себя сигнал положения клапана.
5. Способ по п. 1, в котором подача сигнала для инициирования частичного хода клапана включает в себя отправку инструкций для плавного перемещения клапана, причем инструкции включают в себя целевое расстояние перемещения клапана и скорость плавного перемещения.
6. Способ по п. 1, в котором подача сигнала для инициирования частичного хода клапана включает в себя отправку инструкций для шагового перемещения клапана, причем инструкции включают в себя величину шага перемещения клапана меньшую, чем полный ход клапана.
7. Способ по п. 1, в котором подача сигнала для инициирования частичного хода клапана включает в себя отправку инструкций для многошагового перемещения клапана, причем инструкции включают в себя величину шага, количество шагов и интервал времени между шагами.
8. Способ по п. 1, в котором подача сигнала для инициирования частичного хода клапана включает в себя отправку инструкций для одного или более из плавного перемещения клапана или шагового перемещения клапана.
9. Способ по п. 1, в котором отслеживание сигналов обратной связи на предмет изменения относительно стационарных условий дополнительно включает в себя этап определения абсолютного значения каждой производной, осуществляемый перед указанным этапом сравнения производных.
10. Способ по п.1, в котором разные интервалы времени включают в себя два, три или пять разных интервалов времени.
11. Способ по п. 1, в котором сигнал для инициирования частичного хода клапана для перемещения регулирующего клапана из первого положения включает в себя второе положение с максимально допустимым расстоянием, настроенным на прерывание стационарных условий без отключения системы турбокомпрессора.
12. Способ по п. 1, дополнительно включающий в себя этап, на котором:
посредством системы управления принимают сигнал для инициирования диагностического теста, причем сигнал для инициирования диагностического теста представляет собой команду ручного запуска или периодическую тестовую команду.
13. Система управления клапаном, содержащая:
запоминающее устройство для хранения инструкций
и процессор, выполненный с возможностью исполнения инструкций для:
подтверждения стационарных условий для системы турбокомпрессора, включающих в себя то, что регулирующий клапан находится в первом положении;
подачи на исполнительный механизм регулирующего клапана сигнала для инициирования частичного хода клапана для перемещения регулирующего клапана из первого положения;
после подачи сигнала для инициирования частичного хода клапана, приема сигналов обратной связи от датчиков в системе турбокомпрессора;
отслеживания сигналов обратной связи на предмет изменения относительно стационарных условий, причем указанное отслеживание включает в себя:
идентификацию установленного количества разных интервалов времени для применения;
отслеживание дифференциала для сигналов обратной связи по каждому из указанных разных интервалов времени
и сравнение производных, вычисленных посредством использования каждого из разных интервалов времени, со стационарным порогом;
подачи сигнала на исполнительный механизм для возвращения регулирующего клапана в первое положение в ответ на то, что во время указанного отслеживания обнаружено изменение относительно стационарных условий в течение одного из указанных разных интервалов времени;
и генерирования сигнала неисправности в ответ то, что во время указанного отслеживания не обнаружено изменение относительно стационарных условий в течение указанных разных интервалов времени.
14. Система управления клапаном по п. 13, в которой при сравнении указанных производных, процессор дополнительно выполнен с возможностью определения абсолютного значения каждой производной.
15. Система управления клапаном по п. 14, в которой разные интервалы времени включают в себя два, три или пять разных интервалов времени.
16. Система управления клапаном по п.13, в которой стационарный порог представляет собой минимальное значение изменения, требуемое для индикации отклонения от стационарных условий.
17. Система управления клапаном по п. 13, в которой при подтверждении стационарных условий процессор дополнительно выполнен с возможностью:
отслеживания сигналов обратной связи для одного или более из давления всасывания, давления нагнетания или расхода.
18. Система управления клапаном по п. 13, в которой сигналы обратной связи включают в себя сигналы обратной связи по меньшей мере от одного датчика.
19. Долговременный машиночитаемый носитель, содержащий инструкции, исполняемые по меньшей мере одним процессором, причем машиночитаемый носитель содержит одну или более инструкций для:
подтверждения стационарных условий для системы турбокомпрессора, включающих в себя то, что регулирующий клапан находится в первом положении;
подачи сигнала на исполнительный механизм регулирующего клапана для инициирования частичного хода клапана для перемещения регулирующего клапана из первого положения;
после подачи сигнала для инициирования частичного хода клапана приема сигналов обратной связи от датчиков системы турбокомпрессора;
отслеживания сигналов обратной связи на предмет изменения относительно стационарных условий, причем указанное отслеживание включает в себя:
идентификацию установленного количества разных интервалов времени для применения;
отслеживание дифференциала для сигналов обратной связи по каждому из указанных разных интервалов времени
и сравнение производных, вычисленных посредством использования каждого из разных интервалов времени, со стационарным порогом;
подачи сигнала на исполнительный механизм для возврата регулирующего клапана в первое положение в ответ на то, что во время указанного отслеживания обнаружено изменение относительно стационарных условий в течение одного из указанных разных интервалов времени;
и генерирования сигнала неисправности в ответ на то, что во время указанного отслеживания не обнаружено изменение относительно стационарных условий в течение указанных разных интервалов времени.
20. Долговременный машиночитаемый носитель по п. 19, дополнительно содержащий одну или более инструкций для:
приема сигнала для инициирования диагностической проверки, причем подтверждение стационарных условий выполняется в ответ на прием сигнала для инициирования диагностической проверки.
| US 2002139180 A1, 03.10.2002 | |||
| US 2016273676 A1, 22.09.2016 | |||
| US 2011040526 A1, 17.02.2011 | |||
| US 2011114191 A1, 19.05.2011 | |||
| УСТРОЙСТВО ИЗМЕРЕНИЯ, КОНТРОЛЯ И ОЧИСТКИ ДЛЯ СИСТЕМ ПОДАЧИ ЖИДКОСТИ | 2004 |
|
RU2303735C2 |

