Область техники, к которой относится изобретение
Настоящее изобретение относится, главным образом, к контроллерам, в частности к способам и устройствам для соединения электропневматического контроллера с преобразователем положения в системе управления технологическим процессом.
Уровень техники
Электронные устройства управления (например, электропневматический контроллер, программируемые контроллеры, аналоговые схемы управления и др.) обычно используются для контроля устройств управления технологическим процессом (например, регулирующие клапаны, насосы, заслонки и др.). Электронные устройства управления вызывают определенное действие устройств управления технологическим процессом. С целью обеспечения безопасности, экономической эффективности и надежности, многие известные мембранные или пневматические поршневые исполнительные механизмы используются для пуска устройств управления технологическим процессом, и обычно подключаются к общей системе управления технологическим процессом через электропневматический контроллер. Электропневматические контроллеры обычно предназначены для приема одного или нескольких управляющих сигналов, и преобразуют эти управляющие сигналы в давление, передаваемое к пневматическому исполнительному механизму, чтобы вызвать требуемое действие устройства управления технологическим процессом, соединенного с пневматическим исполнительным механизмом. Например, если при управлении технологическим процессом обычно необходим клапан с пневматическим приводом для пропускания большего объема технологической жидкости, амплитуда управляющего сигнала, приложенного к электропневматическому контроллеру, связанному с клапаном, может возрастать (например, в случае, если электропневматический контроллер предназначен для приема управляющего сигнала 4-20 мА, с 10 миллиампер (мА) до 15 мА).
Электропневматические контроллеры обычно используют сигнал обратной связи, возбуждаемый сенсорной системой или элементом с обратной связью (например, датчик положения), который воспринимает или обнаруживает оперативную реакцию устройства управления с пневматическим приводом. Например, в случае клапана с пневматическим приводом, сигнал обратной связи может соответствовать положению клапана, измеряемому или определяемому датчиком положения. Электропневматический контроллер сравнивает сигнал обратной связи с желаемым заданным или управляющим сигналом и использует процесс управления положением для формирования величины подстройки, исходя из сигнала обратной связи и управляющего сигнала (например, разности между ними). Величина подстройки соответствует давлению, передаваемому к пневматическому исполнительному механизму для достижения желаемого действия устройства управления (например, желаемого положения клапана), соединенного с пневматическим исполнительным механизмом.
Раскрытие изобретения
Предлагается вариант осуществления способов и устройств для соединения электропневматического контроллера с преобразователем управления положением в системе управления технологическим процессом. Вариант выполнения устройства содержит преобразователь положения, снабженный первым контактом и вторым контактом, соединенным с источником питания, электропневматический контроллер, снабженный, по меньшей мере, первым контактом, соединенным с первым контактом преобразователя положения, и сопротивление, подключенное между первым контактом и вторым контактом электропневматического контроллера.
Другой предлагаемый вариант выполнения устройства содержит преобразователь положения, снабженный первым и вторым контактами, и электрический разъединитель, снабженный первым, вторым и третьим контактами, при этом третий контакт электрического разъединителя соединен со вторым контактом преобразователя положения. Кроме того, данный вариант выполнения устройства содержит электропневматический контроллер, снабженный, по меньшей мере, первым контактом, соединенным с первым контактом преобразователя положения и первым контактом электрического разъединителя, где электропневматический контроллер снабжен вторым контактом, соединенным со вторым контактом электрического разъединителя.
Предлагаемый вариант осуществления способа содержит соединение первого контакта электропневматического контроллера с первым контактом преобразователя положения и соединение электропневматического контроллера с сопротивлением путем подключения сопротивления между первым контактом и вторым контактом электропневматического контроллера. Вариант осуществления способа, кроме того, содержит соединение второго контакта преобразователя положения с источником питания.
Краткое описание чертежей
На Фиг.1 приведена схема варианта системы управления технологическим процессом, содержащая вариант решения для электропневматического контроллера, преобразователя положения, соединенных с электрическим разъединителем.
На Фиг.2 приведена схема варианта системы управления технологическим процессом, содержащая вариант электропневматического контроллера и преобразователя положения по Фиг.1, соединенного с источником постоянного тока.
На Фиг.3 и 4 приведены блок-схемы вариантов способов, которые могут использоваться для подключения варианта электропневматического контроллера, варианта преобразователя положения и/или варианта электрического разъединителя в решениях, показанных на Фиг.1 и 2.
Осуществление изобретения
Хотя далее описан вариант способов и устройств, содержащих, помимо прочих элементов, программное обеспечение и/или программно-аппаратные средства, следует отметить, что такие системы носят чисто иллюстративный характер, и не должны рассматриваться как ограничивающие. Например, предполагается, что любое или все из этих аппаратных, программных и программно-аппаратных средств могут реализоваться исключительно в аппаратном обеспечении, исключительно в программном обеспечении или в любом сочетании аппаратного и программного обеспечения. Соответственно, хотя далее описан вариант способов и устройств, представленные варианты представляют не единственный способ реализации подобных способов и устройств.
Обычно в системе управления технологическим процессом электропневматический контроллер напрямую подключен к устройству управления (например, регулирующий клапан, насос, заслонка и др.). Датчик положения, соединенный с устройством управления, измеряет перемещение исполнительного механизма, соединенного с устройством управления. Датчик положения может передавать сигнал обратной связи, включающий ток с амплитудой, соответствующей величине перемещения или положению исполнительного механизма. Электропневматический контроллер определяет положение исполнительного механизма, исходя из падения напряжения, возникающего в сопротивлении, в результате сигнала тока в цепи обратной связи, исходящего от датчика положения. Однако в некоторых вариантах электропневматический контроллер может не напрямую соединяться с устройством управления вследствие неблагоприятных условий окружающей среды в местоположении устройства управления. Неблагоприятные условия могут отрицательно влиять на характеристики электропневматического контроллера и/или датчика положения, соединенного с устройством управления. Неблагоприятные окружающие условия могут включать в себя сравнительно высокие температуры, вибрацию, влажность, радиацию и/или сочетание этих условий.
Учитывая возможность влияния неблагоприятных условий, электропневматический контроллер может устанавливаться в относительно благоприятной и/или контролируемой окружающей среде. Не будучи напрямую соединенным с устройством управления, электропневматический контроллер может быть коммуникативно и/или с помощью пневматики связан с устройством управления. Кроме того, датчик положения, соединенный с устройством управления, можно заменить преобразователем положения, способным обеспечить сигнал обратной связи по положению, несмотря на неблагоприятные условия среды, окружающей устройство управления.
Предлагаемые способы и устройства обуславливают способ, с помощью которого преобразователь положения (т.е. элемент с токовым выходом) может коммуникативно связываться с электропневматическим контроллером, без переналадки схемы управления и/или процесса в электропневматическом контроллере. Соединение электропневматического контроллера с преобразователем положения дает возможность электропневматическому контроллеру принимать сигнал обратной связи по положению от преобразователя положения вместо датчика положения, обеспечивающего, например, резистивный выходной сигнал. Описываемый вариант осуществления способов и устройств обеспечивает приспособляемость для замены, например, резистивного датчика положения элементом с токовым выходом, таким как преобразователь положения, и/или приспособляемость для установки электропневматического контроллера в иной, чем устройство управления, эксплуатационной среде.
Кроме того, описываемый здесь вариант осуществления способов и устройств исключает создания контуров заземления между электропневматическим контроллером и преобразователем положения путем выделения соответствующих источников питания для электропневматического контроллера и преобразователя положения. С помощью минимизации и/или исключения контуров заземления в варианте осуществления способов и устройств уменьшена возможность смещения постоянного тока в рамках сигнала обратной связи по положению и/или в рамках электросхемы, содержащейся в преобразователе положения и/или электропневматическом контроллере.
Предлагаемый здесь вариант осуществления способов и устройств содержит решение, в котором электроэнергия передается к преобразователю положения через электрический разъединитель, который получает переменный ток от источника питания. Кроме того, в данном решении электропневматический контроллер определяет положение исполнительного механизма и/или устройства управления, исходя из падения напряжения, вырабатываемого током в цепи обратной связи через сопротивление в электрическом разъединителе. В другом варианте решения, преобразователь положения получает питание от источника постоянного тока. Кроме того, в другом варианте, электропневматический контроллер определяет положение исполнительного механизма и/или устройства управления, исходя из падения напряжения тока в цепи обратной связи через сопротивление, установленное между разъемом электропневматического контроллера, получающего ток обратной связи, и разъемом электропневматического контроллера, подключенного к потенциалу заземления.
Предлагаемый вариант осуществления способов и устройств главным образом касается соединения электропневматического контроллера с преобразователем положения в системе управления технологическим процессом. Несмотря на то что предлагаемые способы и устройства описаны в сочетании с вариантами, в которых использован клапан с пневматическим приводом, предлагаемые способы и устройства могут быть реализованы с клапанами, приводимыми в действие другими способами, и/или в устройствах управления технологическим процессом, работающих не на клапанах.
На Фиг.1 приведена схема системы управления 100 технологическим процессом, содержащей систему управления 102 и регулируемую зону 104 технологического процесса. Вариант системы управления 102 содержит источник тока 110, подающий питание к электропневматическому контроллеру 120 в пределах регулируемой зоны 104 технологического процесса. Система управления 102 может также содержать рабочие станции, контроллеры, коммутационные шкафы, платы ввода/вывода и/или любые другие типы управляющих элементов систем управления технологическим процессом (не показаны).
Вариант электропневматического контроллера 120 содержит первую распределительную коробку 122 для соединения электропневматического контроллера 120 с проводами, по которым подается ток от источника тока 110. Первая распределительная коробка 122 и вторая распределительная коробка 124 могут содержать резьбовые соединители и/или любой другой элемент для присоединения и/или подключения средства передачи (например, провода) к электропневматическому контроллеру 120. В других вариантах питание, необходимое для электропневматического контроллера 120, может подаваться от внешнего источника напряжения, системы управления, источника солнечной энергии, аккумуляторной батареи и др.
Провода и/или другие электрические средства передачи, подающие питающий ток от источника тока 110, могут также передавать управляющие сигналы от системы 102 управления. Управляющие сигналы (например, входные сигналы) могут включать, например, сигнал 4-20 мА, сигнал напряжением 0-10 В постоянного тока, и/или цифровые команды и др. Для клапана 130 управляющие сигналы задают состояние клапана или соответствуют ему. Например, управляющие сигналы могут вызывать открытое, закрытое или промежуточное положение пневматического исполнительного механизма 131, соединенного с клапаном 130.
Питание и/или управляющие сигналы могут совместно использовать один провод от системы управления 102, или, как вариант, питание и/или управляющие сигналы могут приниматься в первой распределительной коробке 122 по нескольким проводам. Например, в случае если управляющим сигналом является сигнал 4-20 мА, для связи с электропневматическим контроллером 120 может использоваться протокол цифровой передачи данных такой, как, например, известный протокол адресуемого по каналу информации дистанционного датчика (HART). Подобная цифровая связь может использоваться системой управления 102 для получения от электропневматического контроллера 120 идентификационной информации, информации об эксплуатационном состоянии и диагностической информации. Например, используя протокол связи HART и двухпроводную схему, управляющий сигнал в виде цифровых данных скомбинирован с питанием от источника 110 тока для электропневматического контроллера 120 в единой витой паре проводов. Кроме того, один из проводов может соединяться с потенциалом заземления. В других вариантах управляющий сигнал может являться сигналом напряжения 0-10 В постоянного тока. Кроме того, провода от системы управления 102 к первой распределительной коробке 122 могут содержать отдельные питающие провода или линии (например, 24 В постоянного тока или 24 В переменного тока) для питания электропневматического контроллера 120.
Кроме того, первую распределительную коробку 122 можно заменить или дополнить одним или несколькими каналами беспроводной связи. Например, электропневматический контроллер 120 может содержать один или несколько беспроводных приемопередатчиков, чтобы активировать электропневматический контроллер 120 для обмена управляющей информацией (заданные значения, информация об эксплуатационном состоянии и др.) с системой управления 102. Если электропневматическим контроллером 120 используется один или несколько беспроводных приемопередатчиков, питание может подаваться к электропневматическому контроллеру 120, например, через провода к местному или удаленному источнику питания (например, источнику тока 110).
Вариант электропневматического контроллера 120, показанный на Фиг.1, регулирует положение исполнительного механизма 131 и, таким образом, положение клапана 130. Электропневматический контроллер 120 может содержать, хотя это не показано, блок управления, электропневматический преобразователь (I/P) и пневматическое реле. В других вариантах электропневматический контроллер 120 может содержать любые другие элементы для регулирования и/или подачи давления к исполнительному механизму 131 клапана. Кроме того, электропневматический контроллер 120 может содержать другие элементы для обработки сигнала, такие как, например, аналого-цифровые преобразователи, фильтры (например, фильтр нижних частот, фильтр верхних частот и цифровые фильтры), усилители и др. Например, управляющий сигнал, получаемый от системы управления 102, может фильтроваться (например, используя фильтр низких/высоких частот) перед обработкой блоком управления в электропневматическом контроллере 120.
Точнее говоря, электропневматический контроллер 120 регулирует положение исполнительного механизма 131, сравнивая сигнал обратной связи, формируемый преобразователем положения 132, с управляющим сигналом, исходящим из системы управления 102. Сигнал обратной связи принимается электропневматическим контроллером 120 через вторую распределительную коробку 124, которая содержит контакты 126 и 128. Электропневматический контроллер 120 определяет сигнал обратной связи, исходя из падения напряжения, возникающего и/или формируемого током в цепи обратной связи между первым контактом 126 и вторым контактом 128.
Управляющий сигнал, исходящий из системы управления 102, может использоваться электропневматическим контроллером 120 как задающий или опорный сигнал, соответствующий желаемому действию клапана 130 (например, желаемое положение, соответствующее проценту операционного раскрытия регулирующего клапана 130). Блок управления в электропневматическом контроллере 120 сравнивает сигнал обратной связи с управляющим сигналом, используя управляющий сигнал и сигнал обратной связи, как значения в алгоритме или процессе регулировки положения, для определения величины подстройки. Процесс регулировки положения, выполняемый блоком управления, определяет (например, рассчитывает) величину подстройки, исходя из разности между сигналом обратной связи и управляющим сигналом. Расчетная разность соответствует величине, на которую электропневматический контроллер 120 должен изменить положение исполнительного механизма 131, связанного с клапаном 130. Расчетное значение величины подстройки также соответствует току, создаваемому блоком управления, чтобы вызвать образование давления воздуха электропневматическим преобразователем (I/P) в электропневматическом контроллере 120.
Электропневматический преобразователь (I/P) в электропневматическом контроллере 120 может быть преобразователем тока в давление, который генерирует магнитное поле, в соответствии с током, протекающим по соленоиду. Соленоид посредством магнитного поля управляет заслонкой, которая регулируется относительно сопла для изменения ограничения потока через сопло/заслонку и для образования давления воздуха, которое изменяется в соответствии со средним значением тока, протекающего по соленоиду. Давление воздуха усиливается пневматическим реле и передается к исполнительному механизму 131, соединенному с клапаном 130. Пневматическое реле в электропневматическом контроллере 120 может быть пневматически соединено с исполнительным механизмом 131 для обеспечения исполнительного механизма 131 давлением воздуха (не показано).
Например, величины подстройки, которые увеличивают ток, создаваемый блоком управления в электропневматическом контроллере 120, могут принуждать пневматическое реле увеличивать давление воздуха, прилагаемое к пневматическому исполнительному механизму 131, чтобы побудить исполнительный механизм 131 перемещать клапан 130 к закрытому положению. Аналогично, величины подстройки, которые уменьшают ток, генерируемый блоком управления, могут принуждать пневматическое реле уменьшать давление воздуха, прилагаемое к пневматическому исполнительному механизму 131, чтобы побудить исполнительный механизм 131 перемещать клапан 130 к открытому положению.
В других вариантах электропневматический контроллер 120 может содержать преобразователь напряжения в давление, в котором возбудителем сигнала подстройки является напряжение, которое изменяется для обеспечения изменяющегося выходного давления для регулировки клапана 130. Кроме того, в других вариантах могут применяться другие типы текучей среды под давлением, в том числе сжатый воздух, рабочая жидкость и др.
Вариант исполнения клапана 130 на Фиг.1 содержит седло клапана, которое формирует отверстие, обеспечивающее проход потока жидкости между входом и выходом. Клапан 130 может быть, например, поворотным клапаном, клапаном на четверть оборота, клапаном, управляемым двигателем, заслонкой или любым другим устройством или аппаратом управления. Пневматический исполнительный механизм 131, соединенный с клапаном 130, функционально связан с органом управления потоком через шток клапана, который перемещает орган управления потоком в первом направлении (например, от седла клапана) для обеспечения протекания среды между входом и выходом, и во втором направлении (например, к седлу клапана) для ограничения или предотвращения протекания среды между входом и выходом.
Исполнительный механизм 131, соединенный с вариантом клапана 130, может содержать поршневой исполнительный механизм двустороннего действия, диафрагму с пружинным механизмом возврата одностороннего действия или поршневой исполнительный механизм, или другой подходящий исполнительный механизм или устройство управления технологическим процессом. Для регулировки скорости потока через клапан 130 клапан соединен с преобразователем положения 132. В других вариантах клапан 130 может быть соединен с датчиком положения и/или датчиком давления, который может содержать, например, потенциометр и/или магнитный датчик. Преобразователь 132 положения может быть соединен с клапаном 130 в случаях, когда рабочая окружающая среда клапана 130 слишком неблагоприятна для других типов датчиков положения и/или датчиков давления, таких как устройства, обеспечивающие лишь резистивный выход.
Преобразователь 132 положения определяет положение исполнительного механизма 131 и, таким образом, положение органа управления потоком относительно седла клапана (например, открытое положение, закрытое положение, промежуточное положение и др.). Преобразователь 132 положения скомпонован для создания или генерирования сигнала обратной связи, такого как, например, механический сигнал, электрический сигнал и др., к электропневматическому контроллеру 120. Сигнал обратной связи может представлять положение исполнительного механизма 131, соединенного с клапаном 130, и, таким образом, положение клапана 130.
Вариант описываемых здесь способов и устройств дает возможность электропневматическому контроллеру 120 принимать сигнал обратной связи от любого типа преобразователя положения 132, показанного на Фиг.1, который может соединяться с клапаном 130. Преобразователь положения 132 содержит датчик положения 133 для распознавания положения исполнительного механизма 131, соединенного с клапаном 130. Датчик положения 133 может содержать потенциометр, магнитный датчик, пьезоэлектрический преобразователь, датчик на эффекте Холла, потенциометрический датчик и др. Датчик положения 133 в преобразователе положения 132 действует как преобразователь линейного перемещения исполнительного механизма 131, соответствующего положению исполнительного механизма 131, в сигнал тока в цепи обратной связи.
Преобразователь положения 132 содержит датчик положения (например, датчик положения 133), который в целом не зависит от влияния неблагоприятной окружающей среды. Преобразователь положения 132 также содержит схему электромагнитного подавления, схему подавления шумов, элементы защиты от вибрации и/или элементы радиационной защиты для дополнительной изоляции или защиты датчика положения 133 от влияния неблагоприятной окружающей среды. Преобразователь положения 132 соединен с электропневматическим контроллером 120 через первый контакт 134, который соединен с первым контактом 126 электропневматического контроллера 120. Кроме того, преобразователь положения 132 содержит второй контакт 136, который получает питание от источника питания.
Вариант регулируемой зоны 104 технологического процесса содержит электрический разъединитель 140 для передачи электрически разделенного питания к преобразователю положения 132. Иначе говоря, питание, передаваемое к преобразователю положения 132 через электрический разъединитель 140, электрически отделено от питания, подаваемого к электропневматическому контроллеру 120 через источник тока 110. Электрическое разделение минимизирует контуры заземления в системе управления 100 технологическим процессом. При сведении к минимуму контуров заземления смещения постоянного тока минимизированы в рамках сигнала обратной связи, вызываемого преобразователем положения 132, и/или любых электрических сигналов напряжения в преобразователе положения 132 и/или электропневматическом контроллере 120.
В варианте, приведенном на Фиг.1, электрический разъединитель 140 получает питание переменного тока от источника питания через контакты 142-146 источника питания. Для получения питания переменного тока от источника питания первый контакт 142 источника питания соединен с линейным входом источника питания, второй контакт 144 источника питания соединен с потенциалом заземления источника питания, а третий контакт 146 источника питания соединен с нейтральной точкой источника питания. Электрический разъединитель 140 предназначен для питания переменным током преобразователя положения 132. Например, если преобразователь положения 132 предназначен для формирования сигнала обратной связи 4-20 мА для электропневматического контроллера 120, электрический разъединитель 140 может конфигурироваться для вывода тока 20 мА. Электрический разъединитель 140 подводит питание к преобразователю положения 132 через третий контакт 148 электрического разъединителя 140 ко второму контакту 136 преобразователя положения 132.
Кроме того, вариант электрического разъединителя 140, показанный на Фиг.1, содержит контакты 150-154 для возможности измерения электропневматическим контроллером 120 падения напряжения, вызываемого током обратной связи через сопротивление 160. Первый контакт 150 электрического разъединителя 140 соединен с первым контактом 134 преобразователя 132 положения и первым контактом 126 электропневматического контроллера 120. Кроме того, второй контакт 152 электрического разъединителя 140 соединен со вторым контактом 128 электропневматического контроллера 120. Сопротивление 160 подключено между первым и вторым контактами 150 и 152 электрического разъединителя 140. Величину сопротивления 160 можно выбрать, исходя из разрешающей способности электропневматического контроллера 120 для точного измерения падения напряжения на сопротивлении 160, и/или ее можно выбрать, исходя из нагрузочных характеристик преобразователя положения 132. Например, если сопротивление составляет 20 Ом, падение напряжения на сопротивлении 160 для сигнала обратной связи 4-20 мА будет соответствовать падению напряжения 0,08-0,40 В соответственно для сигнала обратной связи.
Сигнал тока в цепи обратной связи передается преобразователем положения 132 через первый контакт 134. Электропневматический контроллер 120 определяет падение напряжения сигнала тока в цепи обратной связи через первый и второй контакты 126 и 128, которые соединены с соответствующими первым и вторым контактами 150 и 152 электрического разъединителя 140. Кроме того, электрический разъединитель 140 содержит четвертый контакт 154 с потенциалом заземления, соединенный со вторым контактом 152.
Хотя электропневматический контроллер 120, преобразователь положения 132 и электрический разъединитель 140 изображены в регулируемой зоне 104 технологического процесса, электропневматический контроллер 120, преобразователь 132 положения и/или электрический разъединитель 140 могут устанавливаться в иной рабочей окружающей среде и коммуникативно связываться через контакты 126, 128, 134, 136, и 148-154. Например, преобразователь 132 положения и электрический разъединитель 140 могут быть установлены в окружающей среде с относительно высокой температурой и высокой влажностью (например, влажность 90% и температура 180°F (82,22°C), тогда как электропневматический контроллер 120 установлен в контролируемой окружающей среде с заданной влажностью 10% и температурой 72°F (22,22°C)).
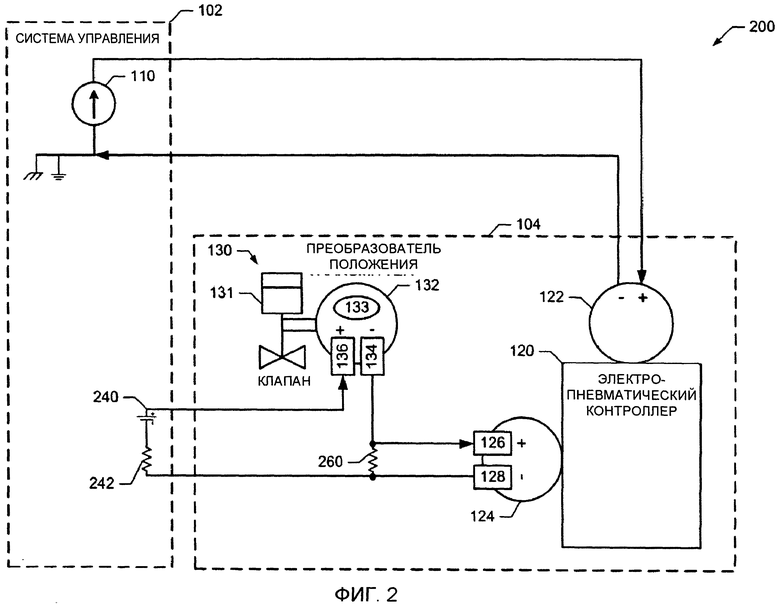
На Фиг.2 приведена схема варианта системы 200 управления технологическим процессом, содержащая вариант электропневматического контроллера 120 и вариант преобразователя 132 положения, показанного на Фиг.1, соединенного с источником постоянного тока 240. Кроме того система управления 200 технологическим процессом, показанная на Фиг.2, содержит источник тока 110, распределительные коробки 122 и 124, первый и второй контакты 126 и 128 электропневматического контроллера 120, клапан 130, исполнительный механизм 131 клапана, датчик положения 133 и первый и второй контакты 134 и 136 преобразователя положения 132, показанного на Фиг.1. Источник тока 110 соединен с электропневматическим контроллером 120 способом, аналогичным показанному на Фиг.1. Кроме того, исполнительный механизм 131 соединен с клапаном 130 и преобразователем положения 132 способом, аналогичным показанному на Фиг.1.
В варианте системы управления 200 технологическим процессом, показанном на Фиг.2, система управления 102 содержит источник постоянного тока 240. Вместо использования электрического разъединителя 140, показанного на Фиг.1, для подачи питания к преобразователю положения 132 в варианте системы управления 200 технологическим процессом, показанном на Фиг.2, преобразователь положения 132 соединен непосредственно с источником питания (например, источником постоянного тока 240). Вариант источника постоянного тока 240 показан в последовательном соединении с сопротивлением 242 для обеспечения эффективного питания преобразователя положения 132. Источник постоянного тока 240 может содержать аккумуляторную батарею, генератор напряжения, источник питания и/или любой другой источник питания и/или схему, которая может генерировать напряжение постоянного тока. Например, если преобразователь положения 132 выводит сигнал тока в цепи обратной связи 4-20 мА, чтобы обеспечить достаточную мощность для преобразователя положения 132, источник постоянного тока 240 может быть 24 В, а сопротивление 242 может быть 200 м.
В одном из вариантов исполнения преобразователь положения 132 получает питание от источника постоянного тока 240 через второй контакт 136. Кроме того, в системе управления 102 источник тока 110 и источник постоянного тока 240 показаны как электрически разделенные. Чтобы избежать контуров заземления, только источник тока 110 соединен с потенциалом заземления. В других вариантах с потенциалом заземления может быть соединен только источник постоянного тока 240 или только второй контакт 128 электропневматического контроллера 120. В ряде других вариантов источник постоянного тока 240, источник тока 110 и второй контакт 128 электропневматического контроллера 120 могут не соединяться с потенциалом заземления.
Вариант регулируемой зоны 104 технологического процесса, показанный на Фиг.2, содержит электропневматический контроллер 120, клапан 130 и преобразователь положения 132. Поскольку система управления 200 технологическим процессом не содержит электрический разъединитель 140 с внутренним сопротивлением 160, как в варианте, показанном на Фиг.1, регулируемая зона 104 технологического процесса содержит сопротивление 260, подключенное между первым и вторым контактами 126 и 128 электропневматического контроллера 120. Кроме того, сопротивление 260 соединено с первым контактом 134 преобразователя положения 132. Электропневматический контроллер 120 определяет или обнаруживает падение напряжения на сопротивлении 260, возникающее за счет сигнала тока в цепи обратной связи от преобразователя положения 132, для расчета положения исполнительного механизма 131, соединенного с клапаном 130.
Сопротивление 260 может подключаться между первым и вторым контактами 126 и 128 во второй распределительной коробке 124 электропневматического контроллера 120. Как вариант, сопротивление 260 может содержаться в электропневматическом контроллере 120, в цепи, соответствующей первому и второму контактам 126 и 128. Кроме того, вариант сопротивления 260 может подключаться между проводами, соединенными с первым и вторым контактами 126 и 128 электропневматического контроллера 120.
Хотя электропневматический контроллер 120 и преобразователь положения 132 изображены в регулируемой зоне 104 технологического процесса на Фиг.2, электропневматический контроллер 120 и преобразователь положения 132 могут устанавливаться в различных рабочих окружающих средах и коммуникативно связываться через контакты 126, 128, и 134. Например, преобразователь положения 132 может быть установлен в окружающей среде с относительно высокой температурой и высокой влажностью (например, влажность 90% и температура 180°F (82,22°C), тогда как электропневматический контроллер 120 установлен в контролируемой окружающей среде с заданной влажностью 10% и температурой 72°F (22,22°C)).
На Фиг.3 и 4 приведены блок-схемы вариантов способов, которые могут использоваться для подключения варианта электропневматического контроллера 120, варианта преобразователя положения 132, варианта источника тока 110, варианта источника питания 240 и/или варианта электрического разъединителя 140 в вариантах решений, показанных на Фиг.1 и/или 2. Один или несколько вариантов операций, показанных на Фиг.3 и 4, можно реализовать, используя ручные операции или любое сочетание любых указанных методов, как, например, любое сочетание программно-аппаратных средств, программного обеспечения, дискретной логики и/или аппаратного обеспечения. Кроме того, можно применять многие другие способы реализации вариантов операций, показанных на Фиг.3 и 4. Например, можно изменять очередность выполнения блоков, и/или можно изменять, исключать, подразделять или объединять один или несколько описанных блоков. Кроме того, любые или все варианты операций, показанных на Фиг.3 и 4, могут выполняться последовательно и/или параллельно, например отдельные потоки обработки, процессоры, устройства, дискретная логика, схемы и др.
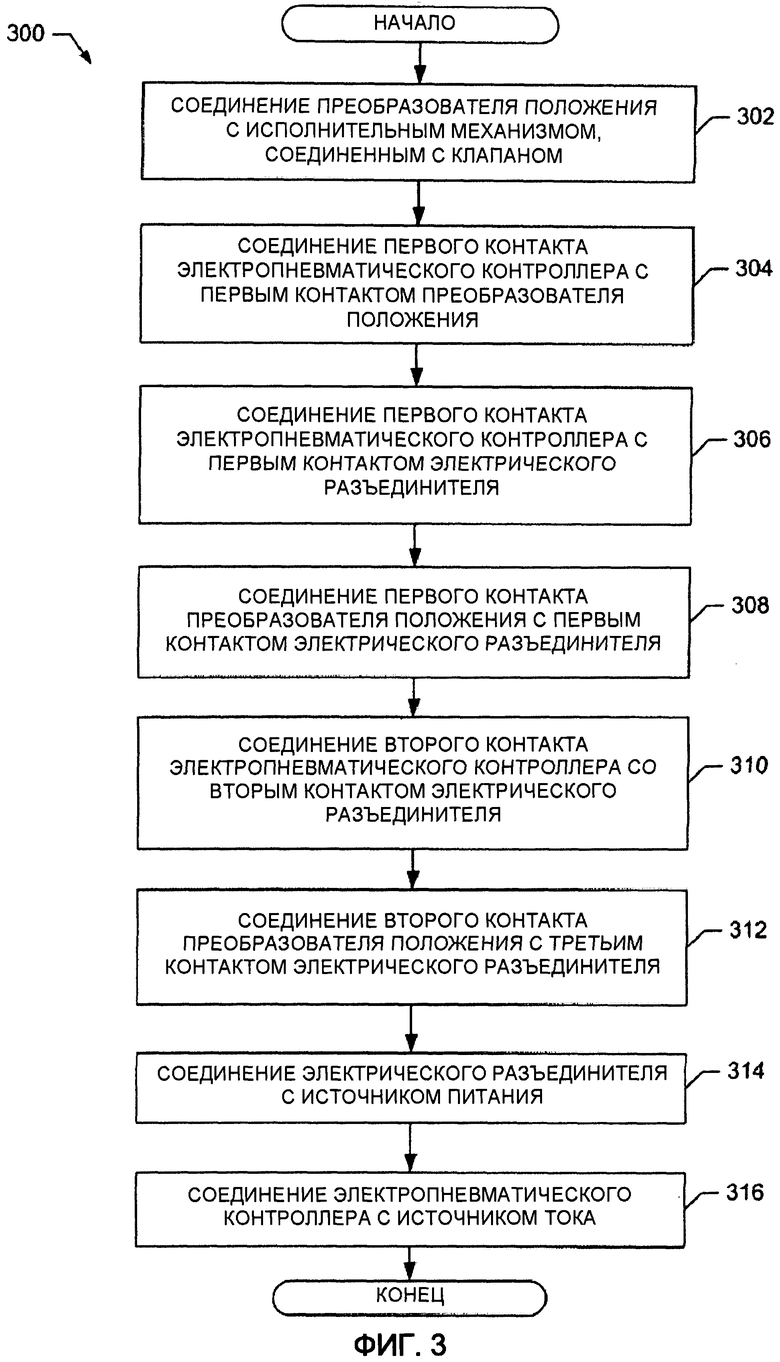
В варианте способа 300, показанного на Фиг.3, электропневматический контроллер 120 объединен с преобразователем положения 132, используя электрический разъединитель 140, показанный на Фиг.1. Оператор и/или электрик, работающие с системой управления 100 технологическим процессом, могут объединить устройства управления 120, 132 и 140 технологическим процессом. Однако вариант осуществления способа 300 может быть выполнен с помощью любого механического и/или электрического способа, который приводит к тому, что элементы 120, 132 и/или 140 управления технологическим процессом объединены вместе. Вариант способа 300, показанный на Фиг.3, начинается, когда преобразователь положения 132 соединен с исполнительным механизмом 131, показанным на Фиг.1 (блок 302). Преобразователь положения 132, например, может быть соединен с исполнительным механизмом 131, взамен датчика положения и/или давления, который не обеспечивает соответствующих характеристик в условиях неблагоприятной среды, окружающей клапан 130.
Вариант осуществления способа 300, показанный на Фиг.3, продолжается, когда первый контакт 134 преобразователя положения 132 соединен с первым контактом 126 электропневматического контроллера 120 (блок 304). Первый контакт 126 электропневматического контроллера 120 и первый контакт 134 преобразователя положения 132 затем соединены с первым контактом 150 электрического разъединителя 140 (блоки 306 и 308). Первые контакты 126, 134, и 150 могут соединяться вместе с помощью проводов, кабелей, волоконной оптики, беспроводных сигналов и/или любых других средств, которые могут передавать сигнал обратной связи.
Далее, второй контакт 128 электропневматического контроллера 120 соединен со вторым контактом 152 электрического разъединителя 140 (блок 310). Кроме того, второй контакт 136 преобразователя положения 132 соединен с третьим контактом 148 электрического разъединителя (блок 312). Электрический разъединитель 140 затем соединен с источником питания (блок 314). Источник питания может быть источником переменного тока или источником постоянного тока. Вариант осуществления способа 300 заканчивается, когда электропневматический контроллер 120 соединен с источником тока 110 (блок 316).
В варианте способа 400, показанном на Фиг.4, электропневматический контроллер 120 объединен с преобразователем положения 132, который получает питание от источника питания 240, показанного на Фиг.2. Оператор и/или электрик, работающие с системой управления 200 технологическим процессом, могут объединить устройства управления 120 и 132 технологическим процессом. Однако вариант осуществления способа 400 может быть выполнен с помощью любого другого механического и/или электрического способа, который приводит к тому, что элементы управления 120 и 132 технологическим процессом объединены вместе. Вариант способа осуществления 400 начинается, когда преобразователь положения 132 соединен с исполнительным механизмом 131, показанным на Фиг.1 (блок 402).
Вариант осуществления способа 400, показанный на Фиг.4, продолжается, когда первый контакт 134 преобразователя положения 132 соединен с первым контактом 126 электропневматического контроллера 120 (блок 404). Первый и второй контакты 126, 128 электропневматического контроллера 120 затем соединены с сопротивлением 260 (блок 406). Кроме того, первый контакт 134 преобразователя положения 132 может быть соединен с сопротивлением 260 в той же точке, что и первый контакт 126 электропневматического контроллера 120. Кроме того, в ряде вариантов, второй контакт 128 электропневматического контроллера 120, источник тока 110 или источник постоянного тока 240 могут соединяться с потенциалом заземления. Далее, второй контакт 136 преобразователя положения 132 соединен с источником питания 240 (блок 408). Вариант способа 400 заканчивается, когда электропневматический контроллер 120 соединен с источником тока 110 (блок 410).
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство управления пневмоцилиндром | 2021 |
|
RU2759706C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ С АКСЕЛЕРОМЕТРОМ ДЛЯ ОБРАТНОЙ СВЯЗИ ПО ПОЛОЖЕНИЮ | 2015 |
|
RU2694803C2 |
| БЕСПРОВОДНОЙ ПРЕОБРАЗОВАТЕЛЬ ПОЛОЖЕНИЯ И СПОСОБ УПРАВЛЕНИЯ ЗАПОРНОЙ АРМАТУРОЙ | 2013 |
|
RU2649730C2 |
| ПЕРИФЕРИЙНОЕ УСТРОЙСТВО РЕГУЛИРОВАНИЯ, ИМЕЮЩЕЕ ЗАДАННЫЕ СОСТОЯНИЯ ОШИБКИ, И СПОСОБ УПРАВЛЕНИЯ ИМ | 2012 |
|
RU2613982C2 |
| БЕСПРОВОДНОЕ УПРАВЛЕНИЕ ДЛЯ ЧРЕСПИЩЕВОДНОЙ ЭХОКАРДИОГРАФИИ | 2019 |
|
RU2795943C2 |
| СПОСОБ И УСТРОЙСТВО С ОБРАТНОЙ СВЯЗЬЮ ДЛЯ ЭЛЕКТРОПНЕВМАТИЧЕСКОЙ УПРАВЛЯЮЩЕЙ СИСТЕМЫ | 2005 |
|
RU2393369C2 |
| ДИАГНОСТИКА УСТРОЙСТВ УПРАВЛЕНИЯ С ИСПОЛЬЗОВАНИЕМ АКСЕЛЕРОМЕТРА | 2015 |
|
RU2701067C2 |
| СХЕМА УПРАВЛЕНИЯ МОДУЛЕМ НАГРЕВА ДЛЯ УПРАВЛЕНИЯ РАБОТОЙ НАГРЕВАТЕЛЯ ЭЛЕКТРОННОГО УСТРОЙСТВА ДЛЯ ПАРЕНИЯ НИКОТИНА И ЭЛЕКТРОННОЕ УСТРОЙСТВО ДЛЯ ПАРЕНИЯ НИКОТИНА | 2021 |
|
RU2837635C1 |
| Приводное устройство с энергоаккумуляторами, способ управления приводным устройством и способ управления энергоаккумуляторами приводного устройства | 2016 |
|
RU2647804C1 |
| КОНТРОЛЛЕР КЛАПАНА, СПОСОБ ЭКСПЛУАТАЦИИ КОНТРОЛЛЕРА КЛАПАНА, СИСТЕМА УПРАВЛЕНИЯ КЛАПАНОМ И МАШИНОЧИТАЕМЫЙ НОСИТЕЛЬ | 2016 |
|
RU2719088C2 |

Группа изобретений относится к системам управления. Технический результат заключается в создании средств управления технологическим процессом, обеспечивающих возможность коммуникативной связи преобразователя положения с электропневматическим контроллером без переналадки схемы управления и/или процесса в электропневматическом контроллере и обеспечивающих исключение создания контуров заземления между электропневматический контроллером и преобразователем положения. Для этого предложено устройство управления технологическим процессом, содержащее: преобразователь положения, содержащий датчик положения, который изменяет токовый сигнал, исходя из положения исполнительного механизма, соединенного с устройством управления, и снабженный первым контактом и вторым контактом, соединенным с источником питания; электропневматический контроллер, снабженный первым контактом, соединенным с первым контактом преобразователя положения, и вторым контактом, соединенным с потенциалом заземления; и сопротивление, расположенное снаружи от преобразователя положения и электропневматического контроллера и подключенное между первым и вторым контактами электропневматического контроллера, причем преобразователь положения передает токовый сигнал от первого контакта преобразователя положения к первому контакту электропневматического контроллера. 3 н. и 15 з.п. ф-лы, 4 ил.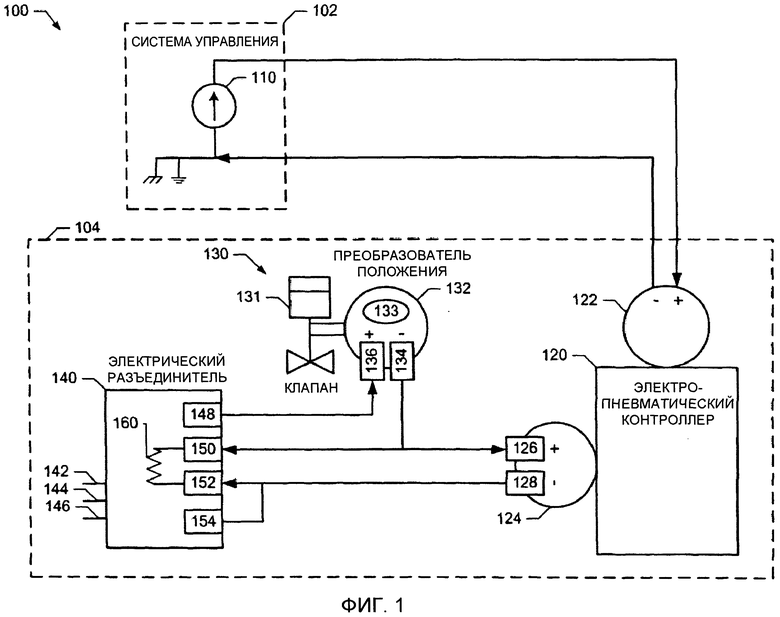
1. Устройство управления технологическим процессом, содержащее: преобразователь положения, содержащий датчик положения, который
изменяет токовый сигнал, исходя из положения исполнительного механизма, соединенного с устройством управления, и снабженный первым контактом и вторым контактом, соединенным с источником питания;
электропневматический контроллер, снабженный первым контактом, соединенным с первым контактом преобразователя положения, и вторым контактом, соединенным с потенциалом заземления; и
сопротивление, расположенное снаружи от преобразователя положения и электропневматического контроллера и подключенное между первым и вторым контактами электропневматического контроллера, причем преобразователь положения передает токовый сигнал от первого контакта преобразователя положения к первому контакту электропневматического контроллера.
2. Устройство по п. 1, отличающееся тем, что дополнительно содержит электрический разъединитель, содержащий указанное сопротивление.
3. Устройство по п. 1, отличающееся тем, что электропневматический контроллер определяет положение исполнительного механизма на основании падения напряжения токового сигнала на сопротивлении.
4. Устройство по п. 1, отличающееся тем, что датчик положения содержит, по меньшей мере, один потенциометр, магнитный датчик, пьезоэлектрический преобразователь, датчик на эффекте Холла, или потенциометрический датчик.
5. Устройство по п. 1, отличающееся тем, что преобразователь положения содержит датчик давления, который изменяет токовый сигнал на основании давления.
6. Устройство по п. 1, отличающееся тем, что преобразователь положения установлен в иной окружающей среде регулируемого технического процесса, чем электропневматический контроллер.
7. Устройство по п. 1, отличающееся тем, что электропневматический контроллер получает питание от источника тока, который электрически отделен от источника питания.
8. Устройство управления технологическим процессом, содержащее: преобразователь положения, снабженный первым и вторым контактами и
датчиком положения, который изменяет токовый сигнал, исходя из положения исполнительного механизма, соединенного с клапаном;
электрический разъединитель, снабженный первым, вторым и третьим контактами, а также сопротивлением, подключенным между первым и вторым контактами электрического разъединителя, причем третий контакт электрического разъединителя соединен со вторым контактом преобразователя положения; и
электропневматический контроллер, снабженный первым контактом, соединенным с первым контактом преобразователя положения и первым контактом электрического разъединителя, и вторым контактом, соединенным с потенциалом заземления и со вторым контактом электрического разъединителя, причем электропневматический контроллер получает питание от источника тока, который электрически отделен от электрического разъединителя.
9. Устройство по п. 8, отличающееся тем, что электропневматический контроллер определяет положение исполнительного механизма на основании падения напряжения токового сигнала на сопротивлении.
10. Устройство по п. 8, отличающееся тем, что преобразователь положения передает токовый сигнал от первого контакта преобразователя положения к первому контакту электропневматического контроллера.
11. Устройство по п. 8, отличающееся тем, что датчик положения содержит, по меньшей мере, один потенциометр, магнитный датчик, пьезоэлектрический преобразователь, датчик на эффекте Холла, или потенциометрический датчик.
12. Устройство по п. 8, отличающееся тем, что преобразователь положения содержит датчик давления, который изменяет токовый сигнал на основании давления.
13. Устройство по п. 8, отличающееся тем, что преобразователь положения установлен в иной окружающей среде регулируемого технологического процесса, чем электропневматический контроллер.
14. Устройство по п. 8, отличающееся тем, что электрический разъединитель передает питание к преобразователю положения от третьего контакта электрического разъединителя ко второму контакту преобразователя положения.
15. Устройство по п. 14, отличающееся тем, что электрический разъединитель получает питание от источника питания.
16. Способ соединения электропневматического контроллера с преобразователем положения в системе управления технологическим процессом, содержащий:
соединение первого контакта электропневматического контроллера с первым контактом преобразователя положения;
соединение электропневматического контроллера с сопротивлением, расположенным снаружи от преобразователя положения и электропневматического контроллера, путем подключения сопротивления между первым и вторым контактами электропневматического контроллера;
соединение второго контакта электропневматического контроллера с потенциалом заземления;
соединение второго контакта преобразователя положения с источником питания; и
соединение источника тока с электропневматическим контроллером, причем источник тока и источник питания электрически разделены.
17. Способ по п. 16, отличающийся тем, что дополнительно содержит: размещение сопротивления в пределах электрического разъединителя, причем сопротивление подключено между первым и вторым контактами электрического разъединителя; и соединение потенциала заземления с электрическим разъединителем.
18. Способ по п. 17, отличающийся тем, что дополнительно содержит размещение источника питания в пределах электрического разъединителя для обеспечения питания преобразователю положения от третьего контакта электрического разъема, присоединенного ко второму контакту преобразователя положения.
| DATEL INC., 4-20mA Current Loop Primer, DMS Application Note, XP002602308, 15.04.2007, 3 стр., [онлайн], найдено 31.07.2014, найдено в Интернет:URL:http://web.archive.org/web/20070415141437/http://www.datel.com/data/meters/dms-an20.pdf | |||
| US 5431182 A, 11.07.1995 | |||
| МАЛОГАБАРИТНОЕ УСТРОЙСТВО ДЛЯ РАЗВОДКИ ПРОВОДОВ (РАЗЪЕДИНИТЕЛЬ ПРОКОФЬЕВА) | 1992 |
|
RU2027262C1 |
| WO 1997048026 A2, 18.12.1997 | |||

