ОБЛАСТЬ ТЕХНИКИ
Изобретение относится к способу для содействия удержанию полосы движения для транспортного средства в соответствии с родовым понятием пункта 1 формулы изобретения. Изобретение также относится к системе для содействия удержанию полосы движения для транспортного средства в соответствии с родовым понятием пункта 7 формулы изобретения.
УРОВЕНЬ ТЕХНИКИ
Удержание вручную транспортного средства в желательном положении в полосе движения может потребовать концентрации на этой конкретной задаче, приводя к усталости водителя, и поэтому имеется риск того, что все внимание не уделяется ситуации на дороге, таким образом, увеличивая риск аварии. Содействие удержанию полосы движения является функцией, которая смягчает напряжение водителя транспортного средства в связи с удержанием внутри полосы движения. Это обычно осуществляется с помощью камеры, которая отслеживает разделители полосы движения. Информация полосы движения посылается в вычислительный блок, который, в свою очередь, посылает управляющие сигналы на привод рулевого управления. Привод рулевого управления управляется таким образом, что водитель должен преодолевать небольшое сопротивление перед отклонением от полосы движения.
Имеется два способа приложения крутящего момента к рулевому управлению. Первый способ заключается в использовании профиля крутящего момента, имеющего “ваннообразную” ("U-образную") форму, где разделители полосы движения действуют как своего рода граница, которую водитель должен пройти перед выходом из полосы движения. В пределах полосы движения, однако, не добавляется или добавляется малый дополнительный крутящий момент. Второй способ использует профиль крутящего момента, имеющего в большей степени “V-образную” форму, где крутящий момент добавляется более непрерывным образом, в результате чего транспортное средство стремится оставаться в центре полосы движения.
Реализация функции содействия удержанию полосы движения в соответствии с упомянутыми первым и вторым способами на тяжелом транспортном средстве может сделать затруднительным, а в некоторых случаях невозможным удерживать все транспортное средство внутри своей собственной полосы движения при прохождении поворотов, и система должна, таким образом, быть отключена. В таких ситуациях потребность в содействии повышается из-за высокой степени точности, необходимой для поддержания транспортного средства в надлежащей части полосы движения.
ЗАДАЧИ ИЗОБРЕТЕНИЯ
Задачей настоящего изобретения является обеспечение способа содействия удержанию полосы движения для транспортного средства, который облегчает для водителя удержание транспортного средства в наиболее подходящем положении при управлении транспортным средством, в том числе при прохождении поворотов.
Задачей настоящего изобретения является обеспечение системы для содействия удержанию полосы движения для транспортного средства, которая облегчает для водителя удержание транспортного средства в наиболее подходящем положении при управлении транспортным средством, в том числе при прохождении поворотов.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Эти и другие задачи, ясные из последующего описания, решаются способом и системой для содействия удержанию полосы движения, моторным транспортным средством, компьютером и компьютерной программой, которые относятся к типу, упомянутому во введении, и которые в дополнение характеризуются признаками, приведенными в отличительной части пунктов 1, 7, 13, 14 и 15 прилагаемой формулы изобретения. Предпочтительные варианты осуществления способа и системы определены в зависимых пунктах 2-6 и 8-12 прилагаемой формулы изобретения.
Более конкретно, задача изобретения решается способом содействия удержанию полосы движения для транспортного средства, содержащим этапы: обнаружения полосы движения; и управления крутящим моментом для рулевого управления упомянутым транспортным средством во время вождения упомянутого транспортного средства так, чтобы следовать упомянутой полосе движения желательным путем, содержащим этап: предоставления профиля крутящего момента для упомянутого управления на основе характеристик транспортного средства и характеристик полосы движения, причем упомянутый профиль крутящего момента определяет боковое положение транспортного средства на упомянутой полосе движения. Предоставление профиля крутящего момента также на основе характеристик транспортного средства облегчает водителю тяжелого/длинномерного транспортного средства удержание транспортного средства в наиболее подходящем положении при управлении транспортным средством, в том числе при прохождении поворотов.
В соответствии с вариантом осуществления, способ дополнительно содержит этап предоставления профиля крутящего момента, определяющего по меньшей мере два различных боковых положения транспортного средства на упомянутой полосе движения. За счет этого содействие удержанию полосы движения дополнительно улучшается в том, что повышается гибкость, так что наиболее подходящее положение может быть выбрано в зависимости от ситуации.
В соответствии с вариантом осуществления, способ дополнительно содержит этап выбора бокового положения на упомянутой полосе движения оператором упомянутого транспортного средства. Тем самым оператор, например водитель, имеет контроль над решением относительно наиболее подходящего положения.
В соответствии с вариантом осуществления, способ дополнительно содержит этап автоматического выбора бокового положения на упомянутой полосе движения. Тем самым водителю не требуется фокусироваться на выборе наиболее подходящего положения на полосе движения, таким образом, безопасность дорожного движения улучшается.
В соответствии с вариантом осуществления способа, упомянутые характеристики транспортного средства содержат по меньшей мере одно из длины транспортного средства, ширины транспортного средства, угла шарнирного сочленения транспортного средства, боковой скорости транспортного средства относительно полосы движения и колесной формулы транспортного средства. Тем самым точность определения наиболее подходящего положения увеличивается, и, таким образом, безопасность дорожного движения улучшается.
В соответствии с вариантом осуществления способа, упомянутые характеристики полосы движения содержат по меньшей мере одно из ширины полосы движения, кривизны полосы движения и количества секций полосы движения. Тем самым точность определения наиболее подходящего положения увеличивается, и, таким образом, безопасность дорожного движения улучшается.
В соответствии с вариантом осуществления, способ дополнительно содержит этап предоставления упомянутого профиля крутящего момента для упомянутого управления на основе характеристик окрестности упомянутого транспортного средства вдоль упомянутой полосы движения. Тем самым точность определения наиболее подходящего положения увеличивается, и, таким образом, безопасность дорожного движения улучшается.
В частности, задача изобретения решается системой для содействия удержанию полосы движения для транспортного средства, содержащей средство для обнаружения полосы движения и средство для управления крутящим моментом для рулевого управления упомянутым транспортным средством во время вождения упомянутого транспортного средства так, чтобы следовать упомянутой полосе движения желательным путем, содержащей средство для предоставления профиля крутящего момента для упомянутого управления на основе характеристик транспортного средства и характеристик полосы движения, причем упомянутый профиль крутящего момента определяет боковое положение транспортного средства на упомянутой полосе движения. Предоставление профиля крутящего момента также на основе характеристик транспортного средства облегчает для водителя тяжелого/длинномерного транспортного средства удержание транспортного средства в наиболее подходящем месте во время управления транспортным средством, в том числе при движении на поворотах.
В соответствии с вариантом осуществления, система дополнительно содержит средство для предоставления профиля крутящего момента, определяющего по меньшей мере два различных боковых положения транспортного средства на упомянутой полосе движения. Тем самым содействие удержанию полосы движения дополнительно улучшается в том, что повышается гибкость, так что наиболее подходящее положение может быть выбрано в зависимости от ситуации.
В соответствии с вариантом осуществления, система дополнительно содержит средство для выбора бокового положения на упомянутой полосе движения оператором упомянутого транспортного средства. Тем самым оператор, например водитель, имеет контроль над решением относительно наиболее подходящего положения.
В соответствии с вариантом осуществления, система дополнительно содержит средство для автоматического выбора бокового положения на упомянутой полосе движения. Тем самым водителю не требуется фокусироваться на выборе наиболее подходящего положения на полосе движения, таким образом, безопасность дорожного движения улучшается.
В соответствии с вариантом осуществления системы, упомянутые характеристики транспортного средства содержат по меньшей мере одно из длины транспортного средства, ширины транспортного средства, угла шарнирного сочленения транспортного средства, боковой скорости транспортного средства относительно полосы движения и колесной формулы транспортного средства. Тем самым точность определения наиболее подходящего положения увеличивается, и, таким образом, безопасность дорожного движения улучшается.
В соответствии с вариантом осуществления системы, упомянутые характеристики полосы движения содержат по меньшей мере одно из ширины полосы движения, кривизны полосы движения и количества секций полосы движения. Тем самым точность определения наиболее подходящего положения увеличивается, и, таким образом, безопасность дорожного движения улучшается.
В соответствии с вариантом осуществления, система дополнительно содержит средство для предоставления упомянутого профиля крутящего момента для упомянутого управления на основе характеристик окрестности упомянутого транспортного средства вдоль упомянутой полосы движения. Таким образом, точность определения наиболее подходящего положения увеличивается, и, таким образом, безопасность дорожного движения улучшается.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Лучшее понимание настоящего изобретения может быть обеспечено со ссылкой на следующее подробное описание совместно с прилагаемыми чертежами, на которых одинаковые ссылочные позиции относятся к одинаковым частям на нескольких видах и на которых:
Фиг. 1 схематично иллюстрирует вид сбоку моторного транспортного средства в соответствии с вариантом осуществления настоящего изобретения;
Фиг. 2 схематично иллюстрирует моторное транспортное средство, имеющее тягач и автомобильный прицеп (трейлер), движущиеся по криволинейной полосе движения дороги;
Фиг. 3 схематично иллюстрирует профиль крутящего момента для управления крутящим моментом для рулевого управления транспортным средством в соответствии с вариантом осуществления настоящего изобретения;
Фиг. 4 схематично иллюстрирует криволинейную полосу движения дороги с разными боковыми положениями транспортного средства, определяемыми профилем крутящего момента;
Фиг. 5 схематично иллюстрирует систему для содействия удержанию полосы движения для транспортного средства в соответствии с вариантом осуществления настоящего изобретения;
Фиг. 6 схематично иллюстрирует блок-схему последовательности операций способа содействия удержанию полосы движения для транспортного средства в соответствии с вариантом осуществления настоящего изобретения; и
Фиг. 7 схематично иллюстрирует компьютер в соответствии с вариантом осуществления настоящего изобретения.
ПОДРОБНОЕ ОПИСАНИЕ
В дальнейшем термин "линия связи" относится к линии связи, которая может быть физическим соединителем, таким как провод оптоэлектронной связи, или нефизическим соединителем, таким как беспроводное соединение, например радио или микроволновая линия связи.
В дальнейшем термин "разделитель полосы движения" относится к любым обнаруживаемым средствам, разграничивающим полосу движения/образующим границу полосы движения и т.п., включая дорожные разметки, дорожные ограждения/разделительные барьеры, конец стороны полосы движения или тому подобное.
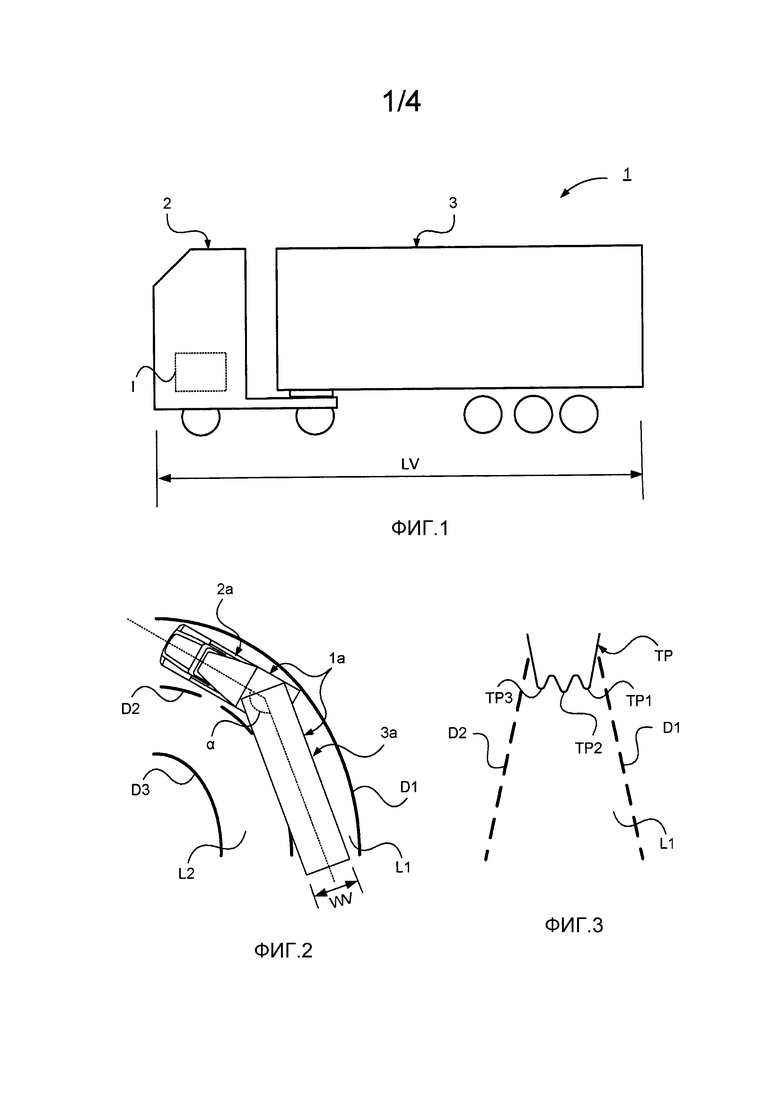
Фиг. 1 схематично иллюстрирует вид сбоку моторного транспортного средства в соответствии с вариантом осуществления настоящего изобретения. Транспортное средство на фиг. 1 образовано грузовиком 1 с тягачом 2 и автомобильным прицепом (трейлером) 3. Упомянутое транспортное средство может быть любым видом транспортного средства, таким как автобус, грузовик без трейлера или более чем с одним трейлером, автофургон или тому подобное. Транспортное средство 1 содержит систему I в соответствии с настоящим изобретением. Транспортное средство имеет длину LV.
Фиг. 2 схематично иллюстрирует моторное транспортное средство, движущееся по криволинейной полосе L1, фиг. 3 - профиль TP крутящего момента для управления крутящим моментом для рулевого управления транспортным средством в соответствии с вариантом осуществления настоящего изобретения, и фиг. 4 - криволинейную полосу движения дороги с разными боковыми положениями транспортного средства, определенными профилем крутящего момента, в соответствии с вариантом осуществления настоящего изобретения.
Моторное транспортное средство 1а на фиг. 2 имеет тягач 2а и трейлер 3а, движущиеся по криволинейной полосе L1 движения дороги. Транспортное средство имеет ширину WV. Упомянутая дорога содержит первую полосу L1 движения, по которой движется транспортное средство, и вторую полосу L2 движения рядом с упомянутой первой полосой движения. Упомянутые полосы L1, L2 движения разделены разделителями D1, D2, D3. Упомянутые разделители D1, D2, D3 могут быть образованы дорожными разметками и/или разделительными барьерами или тому подобным. Полоса L1 движения имеет, как показано на фиг. 4, ширину WL.
Профиль ТР крутящего момента для управления крутящим моментом для рулевого управления транспортным средством определяет три латерально разделенных части ТР1, ТР2, ТР3 профиля крутящего момента, определяющие три различных боковых положения P1, P2, P3 транспортного средства на упомянутой полосе L1 движения, крайнюю правую часть ТР1, определяющую крайнее правое боковое положение P1 на упомянутой полосе L1 движения, среднюю часть ТР2 профиля, определяющую среднее боковое положение Р2 на упомянутой полосе L1 движения, и крайнюю левую часть ТР3 профиля, определяющую крайнее левое боковое положение P3 на упомянутой полосе L1 движения.
Фактическое боковое положение из крайнего правого, среднего и крайнего левого положения P1, P2, P3 на полосе движения может меняться в зависимости от упомянутых характеристик полосы движения и характеристик транспортного средства. Профиль крутящего момента может, таким образом, изменяться в зависимости от упомянутых характеристик полосы движения и характеристик транспортного средства.
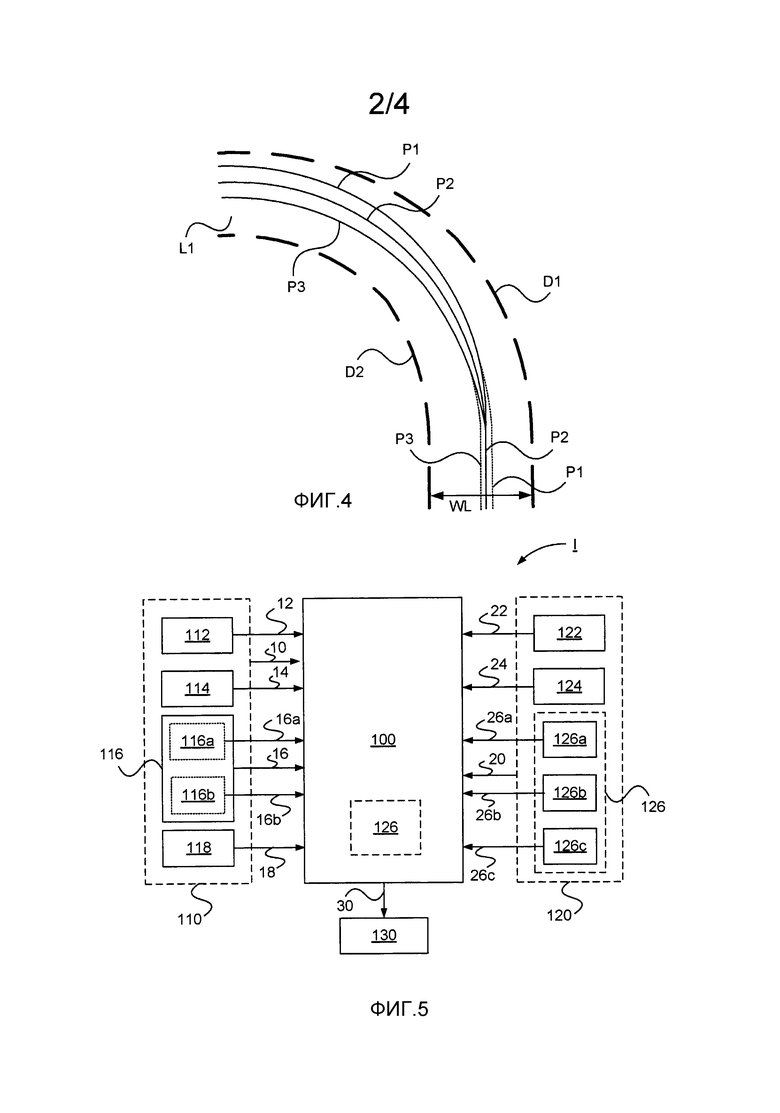
На прямой дороге профиль крутящего момента может быть V-образной формы, соответственно среднему положению, помогая водителю удерживать транспортное средство в середине полосы движения, как показано на фиг. 4.
Тем не менее, также на прямой дороге может быть применен профиль крутящего момента, имеющий, например, крайнее левое, среднее и крайнее правое боковое положение, см. пунктирные линии на фиг. 4. Крайнее левое положение будет наиболее подходящим, например, если препятствия, такие как припаркованные транспортные средства и/или трейлеры, присутствуют на правой обочине дороги, в предположении правостороннего дорожного движения и транспортного средства, движущегося по крайней правой полосе движения. Крайнее правое положение будет наиболее подходящим, например, при интенсивном дорожном движении с встречным движением или движении транспорта в соседней полосе, в предположении правостороннего дорожного движения и транспортного средства, движущегося по крайней правой полосе. Среднее положение будет наиболее подходящим при нормальном вождении без помех на правой или левой стороне, при вождении по широкой полосе движения и т.д.
На кривой, профиль крутящего момента, имеющий, например, крайнее левое, среднее и крайнее правое боковое положение, может быть применен, например, в соответствии с фиг. 3. Оператор может выбрать наиболее подходящее боковое положение, или система, например система I, описанная со ссылкой на фиг. 5, может автоматически выбрать наиболее подходящий профиль крутящего момента, то есть наиболее подходящее боковое положение, основываясь на характеристиках полосы движения и характеристиках транспортного средства. Если есть достаточно места для выполнения поворота с полным транспортным средством полностью внутри полосы движения, то может быть использовано среднее положение. Если полоса движения на кривой узкая или кривая является резкой, так что транспортному средству потребуется срезать другую(ие) полосу(ы), делая поворот, то предпочтительно выбирается крайнее правое боковое положение, в предположении правостороннего движения. Если вождения по обочине дороги следует избегать по какой-либо причине, то предпочтительно выбирается крайнее левое боковое положение, в предположении правостороннего движения.
Профиль крутящего момента в соответствии с настоящим изобретением может иметь любую подходящую форму, в зависимости от ситуации. Профиль крутящего момента в соответствии с настоящим изобретением может иметь любое подходящее количество латерально разделенных частей профиля крутящего момента, например два или более трех. Профиль крутящего момента в соответствии с настоящим изобретением может иметь любую подходящую форму, такую как, например, более U-образную форму, ваннообразную форму или тому подобное.
Фиг. 5 схематично иллюстрирует систему I для содействия удержанию полосы движения для транспортного средства в соответствии с вариантом осуществления настоящего изобретения.
Система I содержит электронный блок 100 управления для упомянутого содействия удержанию полосы движения.
Система I содержит средство 110 определения характеристик полосы движения. Упомянутые характеристики полосы движения содержат по меньшей мере одно из ширины полосы движения, кривизны полосы движения, препятствий на полосе движения, дорожной ситуации и количества секций полосы движения.
Упомянутое средство 110 определения характеристик полосы движения содержит средство 112 определения ширины полосы движения для определения ширины полосы движения, по которой движется транспортное средство. Упомянутое средство 112 определения ширины полосы движения содержит, согласно варианту осуществления, блок камеры для обнаружения разделителей полосы движения вдоль дороги, по которой движется транспортное средство. Упомянутый блок камеры выполнен с возможностью обнаруживать упомянутые разделители полосы движения в связи с и впереди транспортного средства вдоль упомянутой дороги. Упомянутое средство 112 определения ширины полосы движения может содержать любые подходящие средства для определения ширины полосы движения, включая любой подходящий детектор и/или данные карты вдоль проезжаемой дороги.
Упомянутое средство 110 определения характеристик полосы движения содержит средство 114 определения кривизны полосы движения для определения кривизны полосы движения, по которой движется транспортное средство. Упомянутое средство 114 определения кривизны полосы движения содержит, согласно варианту осуществления, блок камеры для обнаружения разделителей полосы движения перед транспортным средством вдоль упомянутой дороги так, чтобы определять упомянутую кривизну. Упомянутое средство 114 определения кривизны полосы движения содержит, согласно варианту осуществления, средство 124 определения боковой скорости для определения боковой скорости транспортного средства так, чтобы определять кривизну полосы движения, по которой движется транспортное средство.
Упомянутое средство 110 определения характеристик полосы движения содержит средство 116 определения характеристик окрестности для определения характеристик окрестности упомянутого транспортного средства вдоль полосы движения дороги, по которой движется упомянутое транспортное средство. Упомянутые характеристики окрестности могут содержать препятствия вдоль упомянутой полосы движения и/или трафик в связи с упомянутой полосой движения.
Упомянутое средство 116 определения характеристик окрестности, таким образом, содержит средство 116а определения препятствий на полосе движения для определения препятствий в связи с упомянутой полосой движения, вдоль которой движется транспортное средство. Упомянутые препятствия могут быть любым видом препятствия в связи с упомянутой полосой движения, т.е. на полосе или рядом с упомянутой полосой движения, таким как транспортные средства, припаркованные на обочине, дорожные работы, обочина дороги, которая не пригодна для езды из-за, например, рыхлого грунта и т.п. Упомянутое средство определения препятствий содержит, согласно варианту осуществления, блок камеры, и/или лазерный блок, и/или радиолокационный блок для обнаружения препятствий вдоль дороги, проезжаемой транспортным средством. Упомянутое средство определения препятствий может содержать любые подходящие средства для определения препятствий, включая любой подходящий детектор, такой как IR-камера.
Упомянутое средство 116 определения характеристик окрестности, таким образом, содержит средство 116b определения трафика для определения трафика в связи с упомянутой полосой движения, по которой движется транспортное средство. Упомянутый трафик может быть любым видом трафика в связи с упомянутой полосой движения, то есть на полосе или рядом с упомянутой полосой, таким как встречный трафик, трафик в соседних полосах движения, обгоняющие транспортные средства и т.д. Упомянутое средство 116b определения трафика содержит, согласно варианту осуществления, блок камеры, и/или лазерный блок, и/или радиолокационный блок для обнаружения трафика вдоль дороги, проезжаемой транспортным средством.
Упомянутое средство 110 для определения характеристик полосы движения содержит средство 118 определения секций полосы движения для определения количества секций полосы движения вдоль дороги, по которой движется транспортное средство. Упомянутое средство 118 определения секций полосы движения содержит, согласно варианту осуществления, блок камеры. Упомянутое средство 118 определения секций полосы движения может содержать любые подходящие средства для определения секции полосы движения, включая любой подходящий детектор и/или данные карты вдоль проезжаемой дороги.
Система I содержит средство 120 характеристик транспортного средства. Упомянутые характеристики транспортного средства содержат по меньшей мере одно из длины транспортного средства, ширины транспортного средства, угла шарнирного сочленения транспортного средства, боковой скорости транспортного средства относительно полосы движения и колесной формулы транспортного средства.
Упомянутое средство 120 характеристик транспортного средства содержит средство 122 определения угла шарнирного сочленения для определения угла между тягачом и трейлером и/или угла между трейлером и вторым трейлером, соединенным с первым трейлером. Упомянутое средство 122 определения угла шарнирного сочленения содержит, согласно варианту осуществления, элемент датчика угла. Упомянутое средство 122 определения угла шарнирного сочленения содержит, согласно варианту осуществления, кинематическую модель транспортного средства, причем параметры транспортного средства, такие как длина, положение опорно-сцепного устройства на тягаче и т.д., используются в качестве входных данных, при этом угол шарнирного сочленения вычисляется с использованием частоты рыскания и скорости.
Упомянутое средство 120 характеристик транспортного средства содержит средство 124 определения боковой скорости для определения боковой скорости транспортного средства. Согласно варианту осуществления, упомянутое средство 124 определения боковой скорости содержит Глобальную систему позиционирования, GPS.
Упомянутое средство 120 характеристик транспортного средства содержит входные данные 126 характеристик транспортного средства.
Входные данные 126 характеристик транспортного средства содержат входные данные 126а длины транспортного средства. Упомянутые входные данные 126а длины транспортного средства содержат длину всего транспортного средства и, если применимо, длину тягача и длину трейлера(ов).
Упомянутые входные данные 126 характеристик транспортного средства содержат входные данные 126b ширины для ширины упомянутого транспортного средства. Упомянутые входные данные 126b ширины транспортного средства содержат, если применимо, ширину тягача и ширину трейлера(ов).
Упомянутые входные данные 126 характеристик транспортного средства содержат входные данные 126с колесной формулы транспортного средства для числа колесных осей, положения колесных осей вдоль упомянутого транспортного средства, состояния поднятой оси и нагрузки на ось.
Упомянутое средство 120 характеристик транспортного средства содержит, согласно варианту осуществления, средство определения положения пятой передачи для определения положения пятой передачи на тягаче транспортного средства, имеющего тягач и трейлер, и, таким образом, определения положения трейлера относительно кабины тягача.
Система I дополнительно содержит средство 130 управления приводом рулевого управления для управления приводом рулевого управления для регулирования сопротивления колеса рулевого управления транспортного средства путем применения профиля крутящего момента к приводу рулевого управления, определяющего боковое положение транспортного средства на упомянутой полосе движения.
Электронный блок 100 управления связан по сигналу с упомянутым средством 110 определения характеристик полосы движения через линию 10 связи. Электронный блок 100 управления предназначен для приема через линию 10 связи сигнала от упомянутого средства 110 определения характеристик полосы движения, представляющего данные характеристик полосы движения.
Электронный блок 100 управления связан по сигналу с упомянутым средством 112 определения ширины полосы движения через линию 12 связи. Электронный блок 100 управления предназначен для приема через линию 12 связи сигнала от упомянутого средства 112 определения ширины полосы движения, представляющего данные ширины полосы движения.
Электронный блок 100 управления связан по сигналу с упомянутым средством 114 определения кривизны полосы движения через линию 14 связи. Электронный блок 100 управления предназначен для приема через линию 14 связи сигнала от упомянутого средства 114 определения кривизны полосы движения, представляющего данные кривизны полосы движения для кривизны полосы движения, по которой движется транспортное средство.
Электронный блок 100 управления связан по сигналу с упомянутым средством 116 определения характеристик окрестности через линию 16 связи. Электронный блок 100 управления предназначен для приема через линию 16 связи сигнала от упомянутого средства 116 определения характеристик окрестности, представляющего данные характеристик окрестности, для характеристик окрестности, таких как препятствия и/или трафик вдоль полосы движения, по которой движется транспортное средство.
Электронный блок 100 управления связан по сигналу с упомянутым средством 116а определения препятствий на полосе движения через линию 16а связи. Электронный блок 100 управления предназначен для приема через линию 16а связи сигнала от упомянутого средства 116а определения препятствий на полосе движения, представляющего данные препятствий для препятствий на полосе движения, по которой движется транспортное средство.
Электронный блок 100 управления связан по сигналу с упомянутым средством 116b определения трафика через линию 16b связи. Электронный блок 100 управления предназначен для приема через линию 16b связи сигнала от упомянутого средства 116b определения трафика, представляющего данные трафика для трафика вдоль полосы движения, по которой движется транспортное средство.
Электронный блок 100 управления связан по сигналу с упомянутым средством 118 определения секции полосы движения через линию 18 связи. Электронный блок 100 управления предназначен для приема через линию 18 связи сигнала от упомянутого средства 118 определения секции полосы движения, представляющего данные секции полосы движения для количества полос, смежных с полосой, по которой движется транспортное средство.
Электронный блок 100 управления связан по сигналу с упомянутым средством 120 характеристик транспортного средства через линию 20 связи. Электронный блок 100 управления предназначен для приема через линию 20 связи сигнала от упомянутого средства 120 характеристик транспортного средства, представляющего данные характеристик транспортного средства.
Электронный блок 100 управления связан по сигналу с упомянутым средством 122 определения угла шарнирного сочленения через линию 22 связи. Электронный блок 100 управления предназначен для приема через линию 22 связи сигнала от упомянутого средства 122 определения угла шарнирного сочленения, представляющего данные угла шарнирного сочленения для упомянутого транспортного средства.
Электронный блок 100 управления связан по сигналу с упомянутым средством 124 определения боковой скорости через линию 24 связи. Электронный блок 100 управления предназначен для приема через линию 24 связи сигнала от упомянутого средства 124 определения боковой скорости, представляющего данные боковой скорости для боковой скорости упомянутого транспортного средства.
Электронный блок 100 управления связан по сигналу с упомянутыми входными данными 126а длины транспортного средства через линию 26а связи. Электронный блок 100 управления предназначен для приема через линию 26а связи сигнала от упомянутых входных данных 126а длины транспортного средства, представляющего данные длины транспортного средства для длины транспортного средства. Согласно альтернативному варианту осуществления, упомянутые входные данные 126а длины транспортного средства сохранены в электронном блоке 100 управления.
Электронный блок 100 управления связан по сигналу с упомянутыми входными данными 126b ширины транспортного средства через линию 26b связи. Электронный блок 100 управления предназначен для приема через линию 26b связи сигнала от упомянутых входных данных 126b ширины транспортного средства, представляющего данные ширины транспортного средства. Согласно альтернативному варианту осуществления, упомянутые входные данные 126b ширины транспортного средства сохранены в электронном блоке 100 управления.
Электронный блок 100 управления связан по сигналу с упомянутыми входными данными 126с колесной формулы транспортного средства через линию 26c связи. Электронный блок 100 управления предназначен для приема через линию 26с связи сигнала от упомянутых входных данных 126с колесной формулы транспортного средства, представляющего данные колесной формулы транспортного средства для числа осей на транспортном средстве. Согласно альтернативному варианту осуществления, упомянутые входные данные 126с колесной формулы транспортного средства сохранены в электронном блоке 100 управления.
Упомянутые входные данные 126 характеристик транспортного средства, таким образом, согласно варианту осуществления, сохранены в электронном блоке 100 управления.
Электронный блок 100 управления связан по сигналу с упомянутым средством 130 управления приводом рулевого управления через линию 30 связи. Электронный блок 100 управления предназначен для передачи через линию 30 связи сигнала к упомянутому средству 130 управления приводом рулевого управления, представляющего данные крутящего момента в соответствии с профилем крутящего момента для регулирования сопротивления колеса рулевого управления транспортного средства.
Электронный блок 100 управления выполнен с возможностью обработки упомянутых данных характеристик полосы движения и данных характеристик транспортного средства для определения данных крутящего момента для предоставления профиля крутящего момента для регулирования сопротивления колеса рулевого управления транспортного средства, причем упомянутый профиль крутящего момента определяет боковое положение транспортного средства на упомянутой полосе движения.
Электронный блок 100 управления, согласно варианту осуществления, выполнен с возможностью обработки упомянутых данных ширины полосы движения, данных кривизны полосы движения и/или данных характеристик окрестности, включающих в себя упомянутые данные о препятствиях, данные трафика и/или данные выбора полосы движения, и упомянутых данных угла шарнирного сочленения, данных боковой скорости, данных длины транспортного средства, данных ширины транспортного средства и/или данных об осях транспортного средства для определения упомянутых данных крутящего момента для предоставления профиля крутящего момента для регулирования сопротивления колеса рулевого управления транспортного средства, причем упомянутый профиль крутящего момента определяет боковое положение транспортного средства на упомянутой полосе движения.
Боковое положение на упомянутой полосе движения, согласно варианту осуществления, выбирается оператором упомянутого транспортного средства, причем водитель получает поддержку от системы I, чтобы остаться в выбранном боковом положении полосы движения таким образом, что сопротивление колеса рулевого управления увеличивается через увеличенный крутящий момент в приводе 130 рулевого управления, если водитель отклоняется от упомянутого выбранного бокового положения. Например, профиль крутящего момента согласно фиг. 3 может быть обеспечен на основе характеристик полосы движения и характеристик транспортного средства, где крайнее правое, среднее и крайнее левое положения являются опциями, которые могут иметь различные преимущества/недостатки в зависимости, например, от кривизны и окрестности. Если водитель выбирает крайнее правое положение, то водитель будет получать поддержку, чтобы оставаться в крайнем правом боковом положении на полосе движения. Если водитель выбирает среднее положение, то водитель будет получать поддержку, чтобы оставаться в среднем положении на полосе движения. Если водитель выбирает крайнее левое положение, то водитель будет получать поддержку, чтобы оставаться в крайнем левом боковом положении на полосе движения. Текущее боковое положение из крайнего правого, среднего и крайнего левого положения на полосе движения может меняться в зависимости от упомянутых характеристик полосы движения и характеристик транспортного средства.
Боковое положение на упомянутой полосе движения является, согласно варианту осуществления, автоматически выбранным системой I, т.е. электронный блок 100 управления посылает сигнал, представляющий данные крутящего момента для наиболее подходящего бокового положения, на основе упомянутых характеристик полосы движения и характеристик транспортного средства, причем водитель получает поддержку от системы I, чтобы оставаться в боковом положении полосы движения, выбранном системой I таким образом, что сопротивление колеса рулевого управления увеличивается через увеличение крутящего момента в приводе 130 рулевого управления, если водитель будет отклоняться от упомянутого выбранного бокового положения.
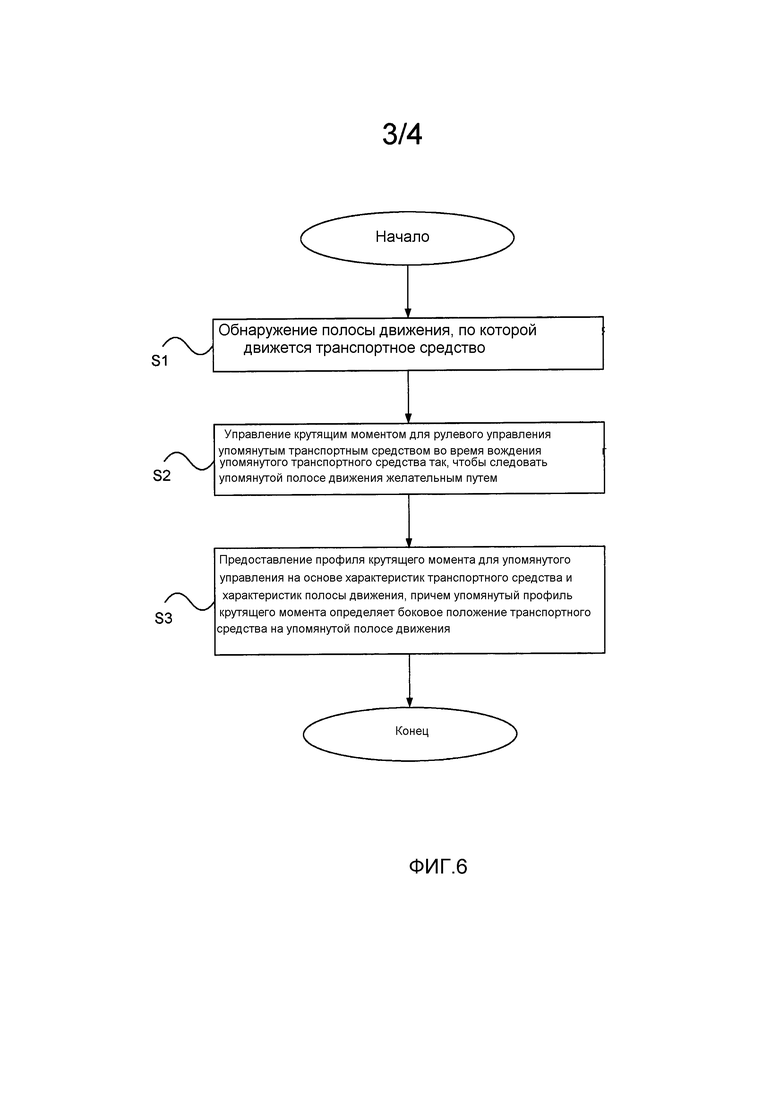
Фиг. 6 схематично иллюстрирует блок-схему способа содействия удержанию полосы движения для транспортного средства согласно варианту осуществления настоящего изобретения.
Согласно варианту осуществления, упомянутый способ содействия удержанию полосы движения для транспортного средства содержит первый этап S1. На этом этапе обнаруживается полоса движения, по которой движется транспортное средство.
Согласно варианту осуществления, упомянутый способ содействия удержанию полосы движения для транспортного средства содержит второй этап S2. На этом этапе крутящий момент для рулевого управления упомянутым транспортным средством при вождении упомянутого транспортного средства управляется таким образом, чтобы следовать упомянутой полосе движения желательным образом.
Согласно варианту осуществления, упомянутый способ содействия удержанию полосы движения для транспортного средства содержит третий этап S3. На этом этапе профиль крутящего момента предоставляется для упомянутого управления на основе характеристик транспортного средства и характеристик полосы движения, причем упомянутый профиль крутящего момента определяет боковое положение транспортного средства на упомянутой полосе движения.
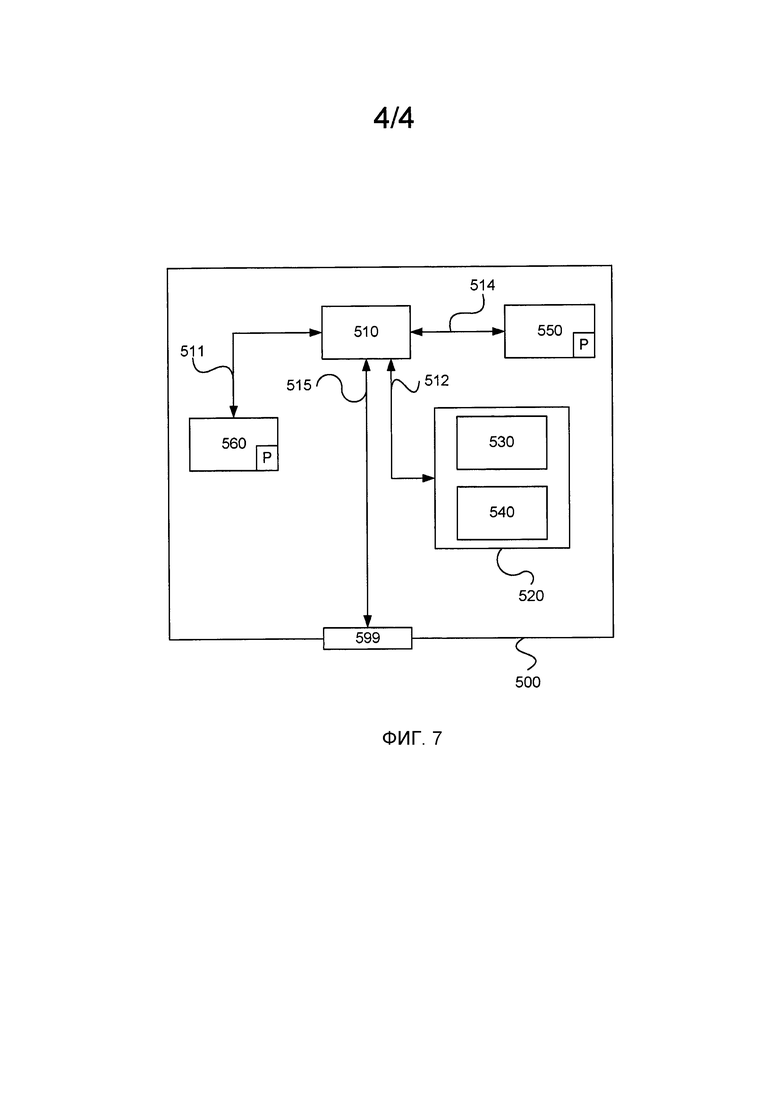
На фиг. 7 показана блок-схема устройства 500. Электронный блок 100 управления, описанный со ссылкой на фиг. 5, может, согласно варианту осуществления, содержать устройство 500. Устройство 500 содержит энергонезависимую память 520, устройство 510 обработки данных и память 550 для записи/считывания. Энергонезависимая память 520 имеет первую секцию 530 памяти, где сохранена компьютерная программа, такая как операционная система, для управления функционированием устройства 500. Кроме того, устройство 500 содержит контроллер шины, последовательный коммуникационный порт, средство ввода/вывода (I/O), аналого-цифровой (A/D) преобразователь, блок ввода времени-даты и передачи, счетчик событий и контроллер прерывания (не показан). Энергонезависимая память 520 также имеет вторую секцию 540 памяти.
Предоставлена компьютерная программа Р, содержащая подпрограммы для содействия удержанию полосы движения для транспортного средства. Программа Р содержит подпрограммы для обнаружения полосы движения, вдоль которой движется транспортное средство. Программа Р содержит подпрограммы для управления крутящим моментом для рулевого управления упомянутым транспортным средством во время вождения упомянутого транспортного средства так, чтобы следовать упомянутой полосе движения желательным образом. Программа Р содержит подпрограммы для предоставления профиля крутящего момента для упомянутого управления на основе характеристик транспортного средства и характеристик полосы движения, причем упомянутый профиль крутящего момента определяет боковое положение транспортного средства на упомянутой полосе движения. Компьютерная программа Р может быть сохранена исполняемым способом или в сжатом состоянии в отдельной памяти 560 и/или в памяти 550 для записи/считывания.
Если утверждается, что устройство 510 обработки выполняет определенную функцию, следует понимать, что устройство 510 обработки данных выполняет некоторую часть программы, которая сохранена в отдельной памяти 560, или некоторую часть программы, которая сохранена в памяти 550 для записи/считывания.
Устройство 510 обработки данных может осуществлять связь с портом 599 передачи данных посредством шины 515 данных. Энергонезависимая память 520 адаптирована для связи с устройством 510 обработки данных через шину 512 данных. Отдельная память 560 адаптирована для связи с устройством 510 обработки данных через шину 511 данных. Память 550 для записи/считывания адаптирована для связи с устройством 510 обработки данных через шину 514 данных. С портом 599 передачи данных могут быть соединены, например, линии связи, соединенные с электронным блоком 100 управления.
Когда данные принимаются на порту 599 данных, они временно сохраняются во второй секции 540 памяти. Когда принятые входные данные временно сохранены, устройство 510 обработки данных запускается для осуществления исполнения кода способом, как описано выше. Сигналы, принятые на порту 599 данных, могут быть использованы устройством 500 для обнаружения полосы движения, по которой движется транспортное средство. Сигналы, принятые на порту 599 данных, могут быть использованы устройством 500 для управления крутящим моментом для рулевого управления упомянутым транспортным средством при движении упомянутого транспортного средства, чтобы следовать упомянутой полосе движения желательным образом. Сигналы, принятые на порту 599 данных, могут быть использованы устройством 500 для предоставления профиля крутящего момента для упомянутого управления на основе характеристик транспортного средства и характеристик полосы движения, причем упомянутый профиль крутящего момента определяет боковое положение транспортного средства на упомянутой полосе движения.
Части способов, описанные здесь, могут быть выполнены устройством 110 с помощью устройства 510 обработки данных, исполняющего программу, сохраненную в отдельной памяти 560 или памяти 550 для записи/считывания. Когда устройство 100 исполняет программу, выполняются части способов, описанных здесь.
Приведенное выше описание предпочтительных вариантов осуществления настоящего изобретения было представлено для целей иллюстрации и описания. Оно не является исчерпывающим и не ограничивает изобретение точными раскрытыми формами. Очевидно, что многие модификации и варианты будут очевидны специалистам в рассматриваемой области техники. Варианты осуществления были выбраны и описаны, чтобы лучше пояснить принципы изобретения и его практические применения, при этом позволяя специалистам в данной области техники понять изобретение в различных вариантах осуществления и с различными модификациями, которые являются подходящими в конкретных предполагаемых применениях.
Изобретение относится к системам помощи при вождении. Способ содействия удержанию полосы движения для транспортного средства содержит этапы: обнаружения полосы движения и управления крутящим моментом для рулевого управления. Для следования по полосе движения желательным путем способ содержит этап: предоставления профиля крутящего момента для упомянутого управления на основе характеристик транспортного средства и характеристик полосы движения. Упомянутый профиль крутящего момента определяет по меньшей мере два различных боковых положения транспортного средства на полосе движения. Достигается облегчение удержания транспортного средства в наиболее подходящем положении. 4 н. и 10 з.п. ф-лы, 7 ил.
1. Способ содействия удержанию полосы движения для транспортного средства (1, 1а), содержащий этапы: обнаружения (S1) полосы (L1) движения; и управления (S2) крутящим моментом для рулевого управления упомянутым транспортным средством во время вождения упомянутого транспортного средства так, чтобы следовать упомянутой полосе движения желательным путем, отличающийся этапом: предоставления (S3) профиля крутящего момента (TP) для упомянутого управления на основе характеристик транспортного средства упомянутого транспортного средства и характеристик полосы движения, причем упомянутый профиль крутящего момента (TP) определяет по меньшей мере два различных боковых положения (P1, Р2, Р3) транспортного средства на упомянутой полосе (L1) движения.
2. Способ по п. 1, дополнительно содержащий этап приема выбора бокового положения (P1, Р2, Р3) на упомянутой полосе (L1) движения, выполненного оператором упомянутого транспортного средства на основе упомянутых характеристик транспортного средства и упомянутых характеристик полосы движения, причем упомянутый профиль крутящего момента (TP) определяет упомянутое выбранное боковое положение.
3. Способ по п. 1, дополнительно содержащий этап автоматического выбора бокового положения (P1, Р2, Р3) на упомянутой полосе (L1) движения на основе упомянутых характеристик транспортного средства и упомянутых характеристик полосы движения, причем упомянутый профиль крутящего момента (TP) определяет упомянутое выбранное боковое положение.
4. Способ по любому из пп. 1-3, в котором упомянутые характеристики транспортного средства содержат по меньшей мере одно из длины транспортного средства (LV), ширины транспортного средства (WV), угла (α) шарнирного сочленения транспортного средства, боковой скорости транспортного средства относительно полосы движения и колесной формулы транспортного средства.
5. Способ по любому из пп. 1 или 2, в котором упомянутые характеристики полосы движения содержат по меньшей мере одно из ширины полосы движения (WL), кривизны полосы движения и количества секций полосы движения.
6. Способ по любому из пп. 1 или 2, дополнительно содержащий этап предоставления упомянутого профиля крутящего момента (TP) для упомянутого управления на основе характеристик окрестности упомянутого транспортного средства вдоль упомянутой полосы (L1) движения.
7. Система (I) для содействия удержанию полосы движения для транспортного средства (1, 1а), содержащая средство (112) для обнаружения полосы (L1) движения; и средство для управления крутящим моментом для рулевого управления упомянутым транспортным средством во время вождения упомянутого транспортного средства так, чтобы следовать упомянутой полосе движения желательным путем, отличающаяся средством (100, 110, 120) для предоставления профиля (TP) крутящего момента для упомянутого управления на основе характеристик транспортного средства упомянутого транспортного средства и характеристик полосы движения, причем упомянутый профиль (TP) крутящего момента определяет по меньшей мере два различных боковых положения (Р1, Р2, Р3) транспортного средства на упомянутой полосе движения.
8. Система по п. 7, дополнительно содержащая средство для выбора бокового положения на упомянутой полосе (L1) движения оператором упомянутого транспортного средства на основе упомянутых характеристик транспортного средства и упомянутых характеристик полосы движения, причем упомянутый профиль крутящего момента (TP) определяет упомянутое выбранное боковое положение.
9. Система по п. 7, дополнительно содержащая средство для автоматического выбора бокового положения (P1, Р2, Р3) на упомянутой полосе (L1) движения на основе упомянутых характеристик транспортного средства и упомянутых характеристик полосы движения, причем упомянутый профиль крутящего момента (TP) определяет упомянутое выбранное боковое положение.
10. Система по любому из пп. 7-9, в которой упомянутые характеристики транспортного средства содержат по меньшей мере одно из длины транспортного средства (LV), ширины транспортного средства (WV), угла (α) шарнирного сочленения транспортного средства, боковой скорости транспортного средства относительно полосы движения и колесной формулы транспортного средства.
11. Система по любому из пп. 8 или 9, в которой упомянутые характеристики полосы движения содержат по меньшей мере одно из ширины полосы движения (WL), кривизны полосы движения и количества секций полосы движения.
12. Система по любому из пп. 8 или 9, дополнительно содержащая средство для предоставления упомянутого профиля крутящего момента (TP) для упомянутого управления на основе характеристик окрестности упомянутого транспортного средства вдоль упомянутой полосы (L1) движения.
13. Моторное транспортное средство (1, 1а), содержащее систему (I) по любому из пп. 7-12.
14. Электронный блок (100) управления, выполняющий этапы способа содействия удержанию полосы движения для транспортного средства (1, 1а) по пп. 1-6.
| US 20110118936 A1, 19.05.2011 | |||
| СИСТЕМА УПРАВЛЕНИЯ ГРУППОВЫМ ГИДРОПРИВОДОМ | 1992 |
|
RU2025577C1 |
| СПОСОБ ВИЗУАЛЬНОГО ПРЕДСТАВЛЕНИЯ ИНФОРМАЦИИ ВОДИТЕЛЮ БЕЗРЕЛЬСОВОГО ТРАНСПОРТНОГО СРЕДСТВА | 2011 |
|
RU2458351C1 |

