ПРЕДПОСЫЛКИ СОЗДАНИЯ ИЗОБРЕТЕНИЯ
1. Область техники
[0001] Изобретение относится к устройству определения положения стоп-линии и системе управления транспортным средством.
2. Раскрытие предшествующего уровня техники
[0002] В японской патентной заявке № 2005-063398, не прошедшей экспертизу, раскрыта технология позиционирования стоп-линии. В вышеуказанном документе раскрыто устройство управления транспортным средством, распознающее положение стоп-линии перед транспортным средством на основании распознавания изображения с камеры транспортного средства.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
[0003] Тем не менее, может случиться так, что распознавание стоп-линии на изображении дорожного покрытия окажется невозможным вследствие истирания белой стоп-линии. Кроме того, распознавание стоп-линии может оказаться невозможным в том случае, когда она скрыта от камеры другим транспортным средством, движущимся впереди транспортного средства. В таких случаях положение стоп-линии можно соответствующим образом определить на основании положения светофора на перекрестке.
[0004] Устройство определения положения стоп-линии согласно первому аспекту настоящего изобретения содержит: блок распознавания светофоров, выполненный с возможностью распознавания светофоров на перекрестке перед транспортным средством на основании результатов обнаружения внешним датчиком транспортного средства; и блок определения положения стоп-линии, выполненный с возможностью определения положения стоп-линии на первом расстоянии от светофора по направлению к транспортному средству, а также, если блок распознавания светофоров обнаружит несколько светофоров, а блок определения положения стоп-линии распознает ближайший передний светофор и задний светофор, исходя из относительного расположения светофоров, определения положения стоп-линии на втором расстоянии от светофора непосредственно перед транспортным средством по направлению к транспортному средству, причем второе расстояние меньше первого расстояния, ближайший передний светофор находится на той стороне перекрестка, где расположено транспортное средство, и расположен ближе всего к транспортному средству, а задний светофор находится на дальней стороне перекрестка.
[0005] Если обнаружено несколько светофоров и распознан ближайший передний и задний светофор на основании относительного расположения светофоров, устройство определения положения стоп-линии согласно первому аспекту настоящего изобретения определяет, что стоп-линия находится на втором расстоянии (которое короче первого расстояния) от светофора непосредственно перед транспортным средством по направлению к транспортному средству. В данном случае, если стоп-линия будет всегда определяться на определенном расстоянии от ближайшего к транспортному средству светофора по направлению к транспортному средству, можно считать, что выбранное расстояние достаточно велико для того, чтобы избежать ошибок при определении положения стоп-линии в пределах перекрестка, поскольку может быть неясно, установлен ли определяемый светофор непосредственно перед перекрестком или после перекрестка. Тем не менее, если в качестве ориентира используется светофор непосредственно перед перекрестком, устройство определения положения стоп-линии согласно первому аспекту может определить, что стоп-линия находится на небольшом расстоянии от светофора непосредственно перед транспортным средством по направлению к транспортному средству, соответствующим образом оценив положение стоп-линии на перекрестке.
[0006] В этом аспекте блок определения положения стоп-линии может быть выполнен таким образом, чтобы при обнаружении нескольких светофоров он не распознавал в качестве заднего светофора тот светофор, расстояние до которого от ближайшего спереди светофора в направлении движения транспортного средства равно или превышает предельную величину перекрестка. Если несколько перекрестков последовательно расположено в направлении движения транспортного средства, устройство определения положения стоп-линии позволяет предотвратить ошибочное распознавание светофора на втором перекрестке перед транспортным средством в качестве заднего светофора на первом перекрестке перед транспортным средством.
[0007] В вышеуказанном аспекте блок определения положения стоп-линии может быть выполнен таким образом, чтобы он не распознавал первый светофор, удаление которого от промежуточного положения меньше порога приближения, в качестве заднего светофора, если имеются светофоры, удаленные от ближайшего переднего светофора в направлении движения транспортного средства на расстояние, меньшее предельной величины перекрестка, причем под промежуточным положением понимают положение между ближайшим светофором перед транспортным средством и светофором, наиболее удаленным от транспортного средства, в группе светофоров, удаленных от ближайшего светофора перед транспортным средством на расстояние, меньшее предельной величины перекрестка. Если на многополосной дороге непосредственно перед перекрестком на соответствующих полосах движения установлено несколько светофоров, устройство определения положения стоп-линии позволяет предотвратить ошибочное распознавание группы светофоров непосредственно перед перекрестком в качестве комбинации ближайшего переднего и заднего светофора.
[0008] В вышеописанном аспекте блок распознавания светофоров может быть выполнен с возможностью определения положения скрытого светофора на основании положения скрытого светофора, который был распознан и скрыт после изменения положения транспортного средства; а блок определения положения стоп-линии может быть выполнен с возможностью определения стоп-линии на втором расстоянии от ближайшего светофора перед транспортным средством по направлению к транспортному средству, если блок распознавания светофоров распознает несколько светофоров, включая скрытый светофор перед транспортным средством, а блок определения положения стоп-линии распознает ближайший передний и задний светофоры. Поскольку положение скрытого светофора, оказавшегося скрытым после распознавания, может быть определено, устройство определения положения стоп-линии на основании положения скрытого светофора может распознавать ближайший передний и задний светофор, даже если фактически можно распознать только один светофор.
[0009] В вышеописанном аспекте блок распознавания светофоров может быть выполнен с возможностью распознавания светофоров для транспортных средств и пешеходов; блок определения положения стоп-линии может быть выполнен с возможностью определения положения стоп-линии на втором расстоянии от ближайшего переднего светофора по направлению к транспортному средству, если блок распознавания светофоров обнаруживает, по меньшей мере, один светофор для транспортных средств и, по меньшей мере, один светофор для пешеходов в качестве группы светофоров, а блок определения положения стоп-линии распознает светофор для транспортных средств в качестве ближайшего переднего светофора, а светофор для пешеходов в качестве заднего светофора, основываясь на взаимном расположении светофоров для транспортных средств и пешеходов. Даже если не удается распознать группу светофоров для транспортных средств, и распознан, по меньшей мере, один светофор для транспортных средств и, по меньшей мере, один светофор для пешеходов, устройство определения положения стоп-линии позволяет распознать ближайший передний и задний светофор на основании взаимного расположения светофоров для транспортных средств и пешеходов.
[0010] Устройство определения положения стоп-линии согласно второму аспекту настоящего изобретения содержит: блок распознавания светофоров, выполненный с возможностью распознавания светофора на перекрестке перед транспортным средством на основании результатов обнаружения внешним датчиком транспортного средства; блок распознавания зоны перекрестка, выполненный с возможностью распознавания (на основании результатов обнаружения внешним датчиком) зоны перекрестка, в которой полоса, по которой движется транспортное средство, прерывается в направлении движения транспортного средства; и блок определения положения стоп-линии, выполненный с возможностью определения положения стоп-линии на первом расстоянии от светофора для транспортных средств по направлению к транспортному средству, а также, когда блок распознавания светофоров обнаружит светофор для транспортных средств, блок распознавания зоны перекрестка обнаружит зону перекрестка, а светофор для транспортных средств будет находиться в зоне перекрестка со стороны транспортного средства, с возможностью определения положения стоп-линии на третьем расстоянии от ближайшего к транспортному средству светофора для транспортных средств по направлению к транспортному средству, причем третье расстояние меньше первого расстояния.
[0011] Если светофор для транспортных средств и зона перекрестка распознаны, и ближайший к транспортному средству светофор для транспортных средств находится в зоне перекрестка на стороне транспортного средства, устройство определения положения стоп-линии согласно второму аспекту настоящего изобретения определяет положение стоп-линии на третьем расстоянии от ближайшего к транспортному средству светофора для транспортных средств по направлению к транспортному средству, причем третье расстояние меньше первого расстояния. Таким образом, с помощью устройства определения положения стоп-линии согласно второму аспекту можно надлежащим образом определить положение стоп-линии на перекрестке по сравнению с ситуацией, в которой стоп-линия считается всегда находящейся на определенном расстоянии от ближайшего к транспортному средству светофора по направлению к транспортному средству, и при этом неясно, установлен ли этот светофор непосредственно перед перекрестком или за перекрестком.
[0012] Система управления транспортным средством согласно третьему аспекту настоящего изобретения содержит: блок распознавания светофоров, выполненный с возможностью распознавания светофоров на перекрестке перед транспортным средством на основании результатов обнаружения внешним датчиком транспортного средства; блок определения положения стоп-линии, выполненный с возможностью определения положения стоп-линии на первом расстоянии от светофора по направлению к транспортному средству, а также, если блок распознавания светофоров обнаружит несколько светофоров, а блок определения положения стоп-линии распознает ближайший передний светофор и задний светофор, исходя из относительного расположения светофоров, определения положения стоп-линии на втором расстоянии от ближайшего переднего светофора по направлению к транспортному средству, причем второе расстояние меньше первого расстояния, ближайший передний светофор находится на той стороне перекрестка, где расположено транспортное средство, и расположен ближе всего к транспортному средству, а задний светофор находится на дальней стороне перекрестка; и блок управления транспортным средством, выполненный с возможностью управления транспортным средством на основании положения стоп-линии, найденного блоком определения положения стоп-линии, и результатов обнаружения внешним датчиком.
[0013] Система управления транспортным средством согласно третьему аспекту настоящего изобретения позволяет надлежащим образом определить положение стоп-линии по сравнению с ситуацией, в которой стоп-линия считается всегда находящейся на определенном расстоянии от ближайшего к транспортному средству светофора по направлению к транспортному средству, и при этом неясно, установлен ли этот светофор непосредственно перед перекрестком или за перекрестком. Таким образом, с помощью системы управления транспортным средством можно управлять транспортным средством, например, замедлять и останавливать транспортное средство, на основании соответствующего найденного положения стоп-линии.
[0014] В соответствии с каждым аспектом настоящего изобретения можно надлежащим образом определить положение стоп-линии, исходя из положения светофора на перекрестке.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0015] Отличительные признаки, преимущества, техническая и промышленная значимость примеров осуществления настоящего изобретения раскрыты ниже со ссылкой на сопроводительные чертежи, в которых одинаковые обозначения относятся к одинаковым элементам:
На ФИГ. 1 изображена блок-схема, иллюстрирующая пример системы управления транспортным средством в соответствии с первым вариантом осуществления;
На ФИГ. 2 изображен план перекрестка, описывающий один из примеров определения положения стоп-линии;
На ФИГ. 3 изображен план, описывающий один из примеров последовательно расположенных перекрестков;
На ФИГ. 4A изображен план перекрестка, описывающий один из примеров, в которых не указано положение светофора;
На ФИГ. 4B изображен план перекрестка, описывающий один из примеров, в которых указано положение светофора;
На ФИГ. 5 изображен план перекрестка, описывающий один из примеров распознавания ближайшего переднего и заднего светофора, используя светофор для пешеходов;
На ФИГ. 6 изображена блок-схема, иллюстрирующая один из примеров процесса определения положения стоп-линии согласно первому варианту осуществления;
На ФИГ. 7 изображена блок-схема, иллюстрирующая один из примеров процесса распознавания ближайшего переднего и заднего светофора;
На ФИГ. 8А изображена блок-схема, иллюстрирующая один из примеров процесса распознавания ближайшего переднего и заднего светофора, используя светофор для пешеходов;
На ФИГ. 8B изображена блок-схема, иллюстрирующая один из примеров процесса определения положения скрытого светофора;
На ФИГ. 9 изображена блок-схема, иллюстрирующая пример системы управления транспортным средством в соответствии со вторым вариантом осуществления;
На ФИГ. 10 изображен план перекрестка, описывающий один из примеров распознавания ближайшего переднего светофора, используя зону перекрестка; и
На ФИГ. 11 изображена блок-схема, иллюстрирующая один из примеров процесса определения положения стоп-линии согласно второму варианту осуществления.
ПОДРОБНОЕ РАСКРЫТИЕ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ ИЗОБРЕТЕНИЯ
[0016] В дальнейшем будут раскрыты варианты осуществления настоящего изобретения со ссылкой на прилагаемые фигуры.
Первый вариант осуществления
[0017] На ФИГ. 1 изображена блок-схема, иллюстрирующая пример системы управления транспортным средством в соответствии с первым вариантом осуществления. Система 100 управления транспортным средством, показанная на ФИГ. 1, установлена на транспортном средстве, в частности, пассажирском автомобиле, и управляет его движением. Система 100 управления транспортным средством позволяет реализовать автономное управление транспортным средством или просто помогает водителю в управлении транспортным средством.
[0018] Система 100 управления транспортным средством содержит устройство 101 определения положения стоп-линии. Устройство 101 определения положения стоп-линии определяет положение стоп-линии на основании расположения светофора на перекрестке. Стоп-линия представляет собой дорожную разметку, указывающую положение остановки или временной остановки транспортного средства. Устройство 101 определения положения стоп-линии не обязательно определяет наличие перекрестка и может определять положение стоп-линии при обнаружении светофоров, установленных в местах, отличающихся от перекрестков. Устройство 101 определения положения стоп-линии будет детально описано ниже.
Конфигурация системы управления транспортным средством в соответствии с первым вариантом осуществления
[0019] Как показано на ФИГ. 1, система 100 управления транспортным средством содержит электронный блок управления (ЭБУ) 10, управляющий системой в целом. ЭБУ 10 содержит центральный процессор (ЦП), постоянное запоминающее устройство (ПЗУ), оперативное запоминающее устройство (ОЗУ) и прочие компоненты. ЭБУ 10 реализует различные функции, например, путем загрузки в ОЗУ программы, хранящейся в ПЗУ, и ее исполнения посредством ЦП. ЭБУ 10 может состоять из нескольких электронных блоков. ЭБУ 10 соединен с внешним датчиком 1, внутренним датчиком 2 и приводом 3.
[0020] Внешний датчик 1 представляет собой детектор, распознающий ситуацию вокруг транспортного средства. Внешний датчик 1 содержит, по меньшей мере, одну видеокамеру и один радиолокационный датчик.
[0021] Камера представляет собой устройство захвата изображений, отображающих ситуацию вокруг транспортного средства. Камера может быть установлена, например, на внутренней стороне лобового стекла транспортного средства и выполняет съемку зоны перед транспортным средством. Камера передает видеоинформацию о ситуации вокруг транспортного средства в ЭБУ 10. Камера может представлять собой монокулярную или стереокамеру.
[0022] Под радиолокационным датчиком понимают детектор, обнаруживающий объект в зоне вокруг транспортного средства с использованием радиоволн (например, миллиметровых волн) или света. Радиолокационный датчик представляет собой, например, миллиметровый радар или радар обнаружение и определение дальности с помощью света (LIDAR). Радиолокационный датчик обнаруживает объект путем направления радиоволн или света в среду вокруг транспортного средства и получения радиоволн или света, отраженных объектом. Радиолокационный датчик передает информацию об обнаруженном объекте в ЭБУ 10. Примером объекта может служить движущееся препятствие, например, пешеход, велосипед или другое транспортное средство, а также неподвижное препятствие, в частности, ограждение и здание.
[0023] Внутренний датчик 2 представляет собой детектор, распознающий состояние транспортного средства в движении. Внутренний датчик 2 содержит датчик скорости транспортного средства или датчик ускорения. Внутренний датчик 2 может содержать датчик скорости рыскания. Под датчиком скорости транспортного средства понимают детектор, определяющий скорость транспортного средства. В качестве датчика скорости движения транспортного средства используют, например, датчик частоты вращения колеса, установленный на колесо транспортного средства, приводной вал, вращающийся вместе с колесом, или иной подобный элемент, и определяющий частоту вращения колеса. Датчик скорости транспортного средства передает полученную информацию о скорости транспортного средства (информацию о частоте вращения колеса) в ЭБУ 10.
[0024] Под датчиком ускорения понимают детектор, определяющий ускорение транспортного средства. Например, датчик ускорения содержит датчик продольного ускорения, определяющий продольное ускорение транспортного средства, и датчик бокового ускорения, определяющий боковое ускорение транспортного средства. Датчик ускорения передает, например, информацию об ускорении транспортного средства в ЭБУ 10. Датчик скорости рыскания представляет собой детектор, определяющий скорость рыскания (угловую скорость вращения) вокруг вертикальной оси в центре тяжести транспортного средства. Например, в качестве датчика скорости рыскания может использоваться гироскопический датчик. Датчик скорости рыскания передает информацию о найденной скорости рыскания транспортного средства в ЭБУ 10.
[0025] Привод 3 представляет собой устройство, используемое для управления транспортным средством. Привод 3 содержит, по меньшей мере, силовой привод движения, силовой привод тормозного механизма и силовой привод рулевого управления. Силовой привод движения управляет энергией движения транспортного средства за счет управления количеством воздуха, подаваемого в двигатель (степень открытия дроссельной заслонки), в соответствии с управляющим сигналом ЭБУ 10. Если речь идет о гибридном транспортном средстве, то энергией движения транспортного средства и количеством воздуха, подаваемого в двигатель, управляют путем подачи управляющего сигнала от ЭБУ 10 на двигатель, служащий источником энергии. Если речь идет об электрическом транспортном средстве, то энергией движения управляют путем подачи управляющего сигнала от ЭБУ 10 на двигатель, служащий источником энергии. В таких случаях двигатель, служащий источником энергии, образует привод 3.
[0026] Силовой привод тормозного механизма регулирует тормозное усилие, прилагаемое к колесам транспортного средства, управляя тормозной системой в соответствии с управляющим сигналом ЭБУ 10. Например, в качестве тормозной системы можно использовать гидравлическую тормозную систему. Силовой привод рулевого управления управляет сервоприводом, развивающим крутящий момент электрической системы рулевого управления, в соответствии с управляющим сигналом ЭБУ 10. Таким образом, привод рулевого управления управляет моментом поворота управляемых колес транспортного средства.
[0027] Далее будет раскрыта функциональная конфигурация ЭБУ 10. ЭБУ 10 содержит блок 11 распознавания светофоров, блок 12 определения положения стоп-линии, блок 13 распознавания стоп-линии и блок 14 управления транспортным средством. Блок 11 распознавания светофоров, блок 12 определения положения стоп-линии и блок 13 распознавания стоп-линии образуют устройство 101 определения положения стоп-линии. Устройством 101 определения положения стоп-линии может быть сам ЭБУ 10. Некоторые из раскрытых ниже функций ЭБУ 10 могут выполняться на сервере, взаимодействующем с транспортным средством.
[0028] Блок 11 распознавания светофоров распознает светофор на перекрестке перед транспортным средством на основании результатов распознавания внешним датчиком 1. Светофор, распознаваемый блоком 11 распознавания светофоров, представляет собой светофор для транспортных средств, находящийся напротив транспортного средства и обращенный в сторону передней части транспортного средства. Светофором перед транспортным средством согласно настоящему варианту осуществления не считается светофор, задняя сторона которого обращена к транспортному средству, или светофор, ориентированный в боковом направлении относительно транспортного средства. Тем не менее, блок 11 распознавания светофоров может иметь функцию распознавания светофора, задняя сторона которого обращена к транспортному средству, и светофора, ориентированного в боковом направлении относительно транспортного средства. Кроме того, блок 11 распознавания светофоров не должен распознавать перекресток.
[0029] Блок 11 распознавания светофоров обнаруживает светофор по заранее сохраненному шаблону изображения светофора, например, на основании снятого камерой изображения. Блок 11 распознавания светофоров может распознавать светофор с помощью иной обработки изображения. В альтернативном варианте блок 11 распознавания светофоров может обнаруживать светофор на основании информации об объекте, обнаруженном радиолокационным датчиком.
[0030] При распознавании светофоров блок 11 распознавания светофоров определяет положение светофора относительно транспортного средства. Блок 11 распознавания светофоров может распознавать положение светофора относительно транспортного средства известным способом, обрабатывая снятое камерой изображение. В альтернативном варианте блок 11 распознавания светофоров может распознавать положение светофора относительно транспортного средства, совмещая обработку снятого камерой с результатами обнаружения радиолокационным датчиком.
[0031] Блок 11 распознавания светофоров распознает светофор для пешеходов дополнительно к светофору для транспортных средств. Светофор для транспортных средств показывает, разрешен ли въезд транспортного средства на перекресток. Светофор для пешеходов показывает, разрешено ли пешеходу пересекать дорогу по пешеходному переходу.
[0032] Кроме того, блок 11 распознавания светофоров может определять сигнал светофора, обрабатывая изображение, например, при управлении транспортным средством (включая помощь при вождении) в качестве системы 100 управления транспортным средством на основании сигнала светофора. Блок 11 распознавания светофоров может определять, соответствует ли светофор полосе, по которой движется транспортное средство, исходя из ориентации светофора относительно транспортного средства и скорости рыскания транспортного средства.
[0033] Блок 11 распознавания светофоров может оценить положение скрытого светофора, оказавшегося скрытым после распознавания. Под скрытым состоянием понимают состояние, в котором однократно распознанный светофор не может быть распознан повторно, будучи закрытым движущимся впереди транспортным средством большой высоты, ветвями дерева над дорогой или иными препятствиями. Под скрытым светофором понимают светофор в скрытом состоянии.
[0034] Блок 11 распознавания светофоров оценивает положение скрытого светофора на основании положения скрытого светофора в момент его распознавании и изменения положения транспортного средства. Под положением скрытого светофора в момент его распознавания понимают положение светофора (относительно транспортного средства) до того, как распознанный светофор перейдет в скрытое состояние. Изменение положения транспортного средства можно рассчитать с помощью так называемой одометрии, основываясь на результатах обнаружения внутренним датчиком 2. Например, блок 11 распознавания светофоров вычисляет изменение положения транспортного средства на основании результатов распознавания датчиком скорости транспортного средства и датчиком скорости рыскания. В альтернативном варианте блок 11 распознавания светофоров может вычислять изменение положения транспортного средства на основании информации о скорости и пути движения транспортного средства, а не одометрии. Таким образом, блок 11 распознавания светофоров оценивает положение скрытого светофора на основании положения скрытого светофора в момент его распознавании и рассчитанного изменения положения транспортного средства. Способ определения положения скрытого светофора не ограничивается вышеизложенным.
[0035] Когда блок 11 распознавания светофоров обнаруживает светофор (светофор для транспортных средств) перед транспортным средством, блок 12 определения положения стоп-линии определяет положение стоп-линии на основании положения светофора. Если, например, блок 11 распознавания светофоров обнаруживает только один светофор, блок 12 определения положения стоп-линии, по существу, определяет положение стоп-линии на первом расстоянии от светофора по направлению к транспортному средству.
[0036] Первое расстояние является предварительно заданным и, по существу, не имеет ограничений. Если блок 11 распознавания светофоров обнаруживает только светофор после перекрестка, то первое расстояние можно установить равным расстоянию, достаточному для предотвращения ошибочного определения стоп-линии в пределах перекрестка. Первое расстояние может составлять от 15 до 80 м. Первое расстояние может составлять, например, 30 м.
[0037] Если блок 11 распознавания светофоров обнаруживает несколько светофоров, блок 12 определения положения стоп-линии определяет наличие ближайшего к транспортному средству светофора на перекрестке (то есть, со стороны транспортного средства) и заднего светофора на дальней стороне перекрестка, исходя из относительного расположения группы светофоров. Под дальней стороной перекрестка понимают противоположную сторону перекрестка со стороны транспортного средства. При распознавании ближайшего переднего и заднего светофора блок 12 определения положения стоп-линии определяет положение стоп-линии на втором расстоянии от светофора непосредственно перед транспортным средством по направлению к транспортному средству.
[0038] Второе расстояние задано предварительно и меньше первого расстояния. Поскольку блок 12 определения положения стоп-линии может определять положение стоп-линии на основании положения светофора непосредственно перед транспортным средством, как только будет распознан ближайший передний и задний светофор, второе расстояние может быть коротким. Второе расстояние может составлять от 1 до 15 м. Второе расстояние может составлять, например, 10 м.
[0039] Под светофором непосредственно перед транспортным средством понимают светофор для транспортных средств непосредственно перед перекрестком, ближайший к транспортному средству. Под задним светофором понимают светофор в задней части перекрестка. Задний светофор может представлять собой светофор для транспортных средств или пешеходов, как будет раскрыто ниже.
[0040] На ФИГ. 2 изображен план перекрестка, описывающий один из примеров определения положения стоп-линии. На ФИГ. 2 показано транспортное средство M, направление D движения транспортного средства M, дорога R, по которой движется транспортное средство M, перекресток C1 перед транспортным средством M, светофор T1 непосредственно перед перекрестком C1, светофор T2 в задней части перекрестка C1 и положение P1 светофора T1 в направлении D движения транспортного средства M.
[0041] В примере, показанном на ФИГ. 2, если блок 11 распознавания светофоров обнаруживает только светофор T1 непосредственно перед перекрестком C1, блок 12 определения положения стоп-линии определяет положение P2 на первом расстоянии Xa от светофора T1 по направлению к транспортному средству (стороне транспортного средства M).
[0042] С другой стороны, когда блок 11 распознавания светофоров обнаруживает два светофора T1, T2, блок 12 определения положения стоп-линии распознает ближайший передний и задний светофор, соответственно, на основании относительного расположения светофоров T1, T2. Распознавание ближайшего переднего и заднего светофора будет раскрыто ниже. При распознавании светофора T1 непосредственно перед перекрестком C1 и ближайшего к транспортному средству M в качестве ближайшего переднего светофора, и светофора T2 в задней части перекрестка C1 в качестве заднего светофора, соответственно, блок 12 определения положения стоп-линии определяет, что стоп-линия находится в положении P3 на втором расстоянии Xb от ближайшего переднего светофора T1 по направлению к транспортному средству M.
[0043] Далее будет раскрыто распознавание ближайшего переднего и заднего светофора блоком 12 определения положения стоп-линии. Если блок 11 распознавания светофоров обнаруживает несколько светофоров, блок 12 определения положения стоп-линии распознает ближайший передний и задний светофор на основании относительного расположения нескольких светофоров.
[0044] Если блок 11 распознавания светофоров обнаруживает несколько светофоров, блок 12 определения положения стоп-линии считает светофор (светофор для транспортных средств), ближайший к транспортному средству M, ближайшим передним светофором. После этого блок 12 определения положения стоп-линии определяет, имеется ли светофор, расстояние от которого до ближайшего переднего светофора в направлении D движения транспортного средства М меньше предельной величины перекрестка. Блок 12 определения положения стоп-линии не распознает задний светофор, расстояние от которого до ближайшего переднего светофора равно или превышает предельную величину перекрестка.
[0045] Предельная величина перекрестка задана предварительно. Такая же предельная величина перекрестка используется для сужения распознанного множества светофоров до светофоров на одном перекрестке, если, например, перекрестки расположены последовательно в направлении D движения транспортного средства М.
[0046] На ФИГ. 3 изображен план, описывающий один из примеров последовательно расположенных перекрестков. Если смотреть со стороны транспортного средства M, на ФИГ. 3 изображен перекресток C2, расположенный непосредственно перед перекрестком C1, светофор T3 непосредственно перед перекрестком C2 и положение P4 непосредственно перед светофором T1 при той же предельной величине Xc перекрестка. Светофор T3 расположен за положением P4 и на расстоянии от ближайшего переднего светофора T1, равном или превышающем эту предельную величину Xc перекрестка. Компоненты, совпадающие с ФИГ. 2, имеют такие же ссылочные обозначения, и их раскрытие не будет приводиться повторно.
[0047] В примере, изображенном на ФИГ. 3, блок 12 определения положения стоп-линии не распознает в качестве заднего светофора светофор T3, расстояние от которого до ближайшего переднего светофора T1 равно или меньше этой предельной величины Xc перекрестка. Таким образом, блок 12 определения положения стоп-линии исключает светофор T3 из возможных вариантов заднего светофора. И наоборот, блок 12 определения положения стоп-линии распознает в качестве варианта заднего светофора светофор T2, расстояние от которого до ближайшего переднего светофора T1 меньше этой предельной величины Xc перекрестка. Таким образом, блок 12 определения положения стоп-линии позволяет предотвратить ошибочное распознавание светофора T3 на втором перекрестке C2 со стороны транспортного средства M в качестве заднего светофора на первом перекрестке C1.
[0048] Если имеются светофоры, удаленные от ближайшего переднего светофора в направлении D движения транспортного средства M на расстояние, меньшее предельной величины Xc перекрестка, блок 12 определения положения стоп-линии определяет наличие светофора, наиболее удаленного от транспортного средства M в группе светофоров, удаленных от ближайшего светофора перед транспортным средством на расстояние, меньшее предельной величины Xc перекрестка, и находящегося на расстоянии, равном или превышающим порог приближения, от промежуточного положения с ближайшим к транспортному средству светофором. Блок 12 определения положения стоп-линии не распознает в качестве заднего светофора светофор, наиболее удаленный от транспортного средства M в группе светофоров, удаленных от ближайшего светофора перед транспортным средством на расстояние, меньшее этой предельной величины Xc перекрестка, и находящийся на расстоянии меньше порога приближения от промежуточного положения с ближайшим к транспортному средству светофором.
[0049] Порог приближения задан предварительно. Порог приближения используется для предотвращения ошибочного распознавания любого из группы светофоров непосредственно перед перекрестком в качестве заднего светофора, если, например, на многополосной дороге непосредственно перед перекрестком установлено несколько светофоров в соответствующих полосах движения.
[0050] На ФИГ. 4A изображен план перекрестка, описывающий один из примеров, в которых не указано положение светофора. На ФИГ. 4A изображен перекресток C4, светофор T4 непосредственно перед перекрестком C4 и светофор T5. Светофоры T4, T5 установлены на соответствующих полосах непосредственно перед перекрестком C4. Кроме того, на ФИГ. 4A показано промежуточное положение Ph между светофорами T4 и T5 в направлении D движения транспортного средства M, порог Xd приближения, положение Pa от промежуточного положения Ph на величину порога Xd приближения в направлении области перед перекрестком C4 и положение Pb от промежуточного положения Ph по на величину порога Xd приближения в направлении задней части перекрестка C4. Светофор T5 находится между положениями Pa и Pb в направлении D движения транспортного средства M.
[0051] В примере, показанном на ФИГ. 4A, блок 12 определения положения стоп-линии считает, что ближайший к транспортному средству М светофор T4 является передним светофором. Кроме того, блок 12 определения положения стоп-линии распознает светофор T5 в качестве светофора, который наиболее удален от транспортного средства M и расстояние от которого до ближайшего переднего светофора T4 меньше этой предельной величины Xc перекрестка.
[0052] В этом примере блок 12 определения положения стоп-линии не распознает в качестве заднего светофора светофор T5, удаленность которого от промежуточного положения Ph между светофорами T4 и T5 меньше порога Xd приближения. Таким образом, блок 12 определения положения стоп-линии может предотвращать ошибочное распознавание светофоров T4 и T5, установленных на соответствующих полосах движения непосредственно перед перекрестком C4, в качестве комбинации переднего и заднего светофора. Кроме того, в этом примере, поскольку блок 12 определения положения стоп-линии не может распознавать задний светофор, блок 12 определения положения стоп-линии определяет положение стоп-линии на первом расстоянии от переднего светофора T4 по направлению к транспортному средству M.
[0053] На ФИГ. 4B изображен план перекрестка, описывающий один из примеров, в которых указано положение светофора. На ФИГ. 4B изображен перекресток C1, светофор T1, светофор T2 (см. ФИГ. 2). Кроме того, на ФИГ. 4B показано промежуточное положение Ph между светофорами T1 и T2, положение Pa от промежуточного положения Ph на величину порога Xd приближения в направлении области перед перекрестком C1 и положение Pb от промежуточного положения Ph по на величину порога Xd приближения в направлении задней части перекрестка C1.
[0054] В примере, показанном на ФИГ. 4B, блок 12 определения положения стоп-линии распознает светофор T2 в качестве светофора, который наиболее удален от транспортного средства M, и расстояние от которого до ближайшего переднего светофора T1 меньше этой предельной величины Xc перекрестка. Кроме того, блок 12 определения положения стоп-линии распознает в качестве заднего светофора светофор T2, удаленность которого от промежуточного положения Ph между передним светофором T1 и светофором T2 равна или превышает порог Xd приближения.
[0055] Ниже будет раскрыт другой вариант распознавания переднего и заднего светофора. Если на перекрестке обнаружен, по меньшей мере, один светофор для транспортных средств и, по меньшей мере, один светофор для пешеходов, блок 12 определения положения стоп-линии распознает светофор для транспортных средств в качестве переднего светофора, а светофор для пешеходов в качестве заднего светофора, руководствуясь относительным расположением светофоров для транспортных средств и пешеходов.
[0056] Если обнаружены светофоры для транспортных средств и пешеходов, блок 12 определения положения стоп-линии определяет, расположены ли распознанные светофоры для транспортных средств на расстоянии, равном или превышающим второй порог Xd2 приближения, перед светофором для пешеходов. Второй порог Xd2 приближения задан предварительно и может совпадать с порогом Xd приближения или отличаться от него. Если обнаруженные светофоры для транспортных средств расположены перед светофором для пешеходов на расстоянии, равном или превышающем второй порог Xd2 приближения, блок 12 определения положения стоп-линии считает, что светофор для транспортных средств, ближайший к транспортному средству M в этой группе, является передним светофором. В альтернативном варианте блок 12 определения положения стоп-линии может считать передним светофором светофор для транспортных средств, ближайший к транспортному средству М, независимо от того, распознан ли светофор для пешеходов.
[0057] Если передним светофором считается светофор для транспортных средств, то блок 12 определения положения стоп-линии определяет наличие светофора для пешеходов, расстояние от которого до ближайшего переднего светофора в направлении D движения транспортного средства М меньше той же предельной величины Xc перекрестка. Блок 12 определения положения стоп-линии не распознает в качестве заднего светофора светофор для пешеходов, расстояние от которого до ближайшего переднего светофора равно или превышает эту предельную величину Xc перекрестка. Таким образом, блок 12 определения положения стоп-линии позволяет предотвратить ошибочное распознавание светофора для пешеходов на другом перекрестке в качестве заднего светофора. Значение той же предельной величины Xc перекрестка, если определению подлежит светофор для пешеходов, может отличаться от значения предельной величины Xc перекрестка, если определению подлежит светофор для транспортных средств.
[0058] Если имеются светофоры для пешеходов, удаленные от ближайшего переднего светофора в направлении D движения транспортного средства на расстояние, меньшее предельной величины Xc перекрестка, блок 12 определения положения стоп-линии определяет наличие светофора для пешеходов, наиболее удаленного от транспортного средства M в группе светофоров для пешеходов, удаленных от ближайшего светофора перед транспортным средством на расстояние, меньшее предельной величины Xd перекрестка, и находящегося на расстоянии, равном или превышающим порог Xd приближения, от промежуточного положения с ближайшим к транспортному средству светофором. Блок 12 определения положения стоп-линии не распознает в качестве заднего светофора светофор для пешеходов, который наиболее удален от транспортного средства M, и удаленность которого от промежуточного положения с ближайшим передним светофором меньше порога Xd приближения. Таким образом, блок 12 определения положения стоп-линии позволяет предотвратить ошибочное распознавание светофора для пешеходов, установленного вблизи светофора для транспортных средств в задней части перекрестка, в качестве заднего светофора. Значение порога Xd приближения, если определению подлежит светофор для пешеходов, может отличаться от значения порога Xd приближения, если определению подлежит светофор для транспортных средств.
[0059] На ФИГ. 5 изображен план перекрестка, описывающий один из примеров распознавания переднего и заднего светофора, используя светофор для пешеходов. На ФИГ. 5 изображен перекресток С5, светофор Т6 для транспортных средств непосредственно перед перекрестком С5 и светофор Т7 для пешеходов непосредственно перед перекрестком С5. Кроме того, на ФИГ. 5 показано положение Pc светофора T7 для пешеходов, положение P4 светофора T6 на расстоянии той же предельной величины Xc перекрестка в направлении задней части перекрестка C5, промежуточное положение Ph между светофором T6 и светофором T7 для пешеходов, положение Pa на расстоянии порога Xd приближения от промежуточного положения Ph в направлении передней части перекрестка C5 и положение Pb на расстоянии порога Xd приближения от промежуточного положения Ph в направлении задней части перекрестка C5. Кроме того, положение Pb соответствует положению, находящемуся на расстоянии второго порога Xd2 приближения от положения Pc светофора T7 для пешеходов в направлении передней части перекрестка C5. Тем не менее, положение Pb, находящееся на расстоянии порога Xd приближения от промежуточного положения Ph в направлении задней части перекрестка C5, не обязательно должно совпадать с положением, находящемся на расстоянии второго порога Xd2 приближения от положения Pc светофора T7 для пешеходов в направлении передней части перекрестка C5. Светофор T7 для пешеходов расположен перед положением P4 и после положения Pb. С другой стороны, светофор Т6 для транспортных средств расположен перед светофором Т7 для пешеходов на расстоянии, равном или превышающем второй порог Xd2 приближения.
[0060] В примере, показанном на ФИГ. 5, блок 12 определения положения стоп-линии определяет, что распознанный светофор Т6 для транспортных средств расположен перед светофором T7 для пешеходов на расстоянии, равном или превышающем второй порог Xd2 приближения. Блок 12 определения положения стоп-линии считает, что светофор Т6 для транспортных средств, расположенный перед светофором T7 для пешеходов на расстоянии, равном или превышающем второй порог Xd2 приближения, и ближайший к транспортному средству М, является передним светофором.
[0061] Блок 12 определения положения стоп-линии определяет наличие светофоров для пешеходов, расстояние от которых до ближайшего переднего светофора T6 в направлении D движения транспортного средства М меньше предельной величины Xc перекрестка. Кроме того, блок 12 определения положения стоп-линии определяет наличие светофора T7 для пешеходов, наиболее удаленного от транспортного средства M в группе светофоров для пешеходов, удаленных от ближайшего светофора T6 перед транспортным средством на расстояние, меньшее этой предельной величины Xc перекрестка, и находящегося на расстоянии от промежуточного положения с ближайшим к транспортному средству светофором, равном или превышающим порог Xd приближения. Поскольку светофор T7 для пешеходов не исключается из числа целей, подлежащих распознаванию в качестве заднего светофора, блок 12 определения положения стоп-линии определяет светофор T6 для транспортных средств в качестве переднего светофора, а светофор T7 для пешеходов – в качестве заднего светофора. Таким образом, блок 12 определения положения стоп-линии может распознавать передний и задний светофоры, используя светофоры для пешеходов на перекрестке.
[0062] При распознавании ближайшего переднего и заднего светофоров, как раскрыто выше, блок 12 определения положения стоп-линии не должен одновременно распознавать несколько светофоров перед транспортным средством М. Когда блок 11 распознавания светофоров определяет положение скрытого светофора перед транспортным средством М, блок 12 определения положения стоп-линии может распознавать ближайший передний и задний светофоры, руководствуясь несколькими светофорами, включая скрытый светофор.
[0063] Блок 12 определения положения стоп-линии может распознавать скрытый светофор в качестве ближайшего переднего или заднего светофора. Скрытый светофор не обязательно должен быть светофором для транспортных средств и может представлять собой светофор для пешеходов. Кроме того, как ближайший передний, так и задний светофор могут быть скрытыми светофорами. Если скрытый светофор распознан в качестве ближайшего переднего светофора, блок 12 определения положения стоп-линии определяет положение стоп-линии, руководствуясь положением скрытого светофора, распознанного в качестве ближайшего переднего светофора.
[0064] Блок 13 обнаружения стоп-линии обнаруживает стоп-линию перед транспортным средством M на основании результатов обнаружения внешним датчиком 1 транспортного средства M. Блок 13 обнаружения стоп-линии обнаруживает стоп-линию на дорожном покрытии, руководствуясь шаблоном стоп-линии на основании, например, снятого камерой изображения. В альтернативном варианте блок 13 обнаружения стоп-линии может распознавать стоп-линию на основании информации об объекте, обнаруженном радиолокационным датчиком. В альтернативном варианте блок 13 обнаружения стоп-линии может распознавать стоп-линию известным способом.
[0065] Когда блок 12 определения положения стоп-линии определяет положение стоп-линии, блок 14 управления транспортным средством управляет транспортным средством М, руководствуясь результатами определения положения стоп-линии и обнаружения внешним датчиком 1 транспортного средства М. Блок 14 управляет транспортным средством М, руководствуясь состоянием движения транспортного средства М, распознанным по результатам обнаружения внутренним датчиком 2. Блок 14 управления транспортным средством управляет движением транспортного средства M, передавая управляющий сигнал на привод 3. Движением транспортного средства M можно управлять в автономном режиме или в режиме помощи при вождении (например, управления педалью тормоза с помощью системы помощи при езде).
[0066] Например, блок 14 управления транспортным средством замедляет транспортное средство M таким образом, чтобы оно могло плавно остановиться в расчетном положении на стоп-линии при изменении сигнала светофора на запрещающий сигнал (например, красный сигнал светофора). Блок 14 управления транспортным средством рассчитывает необходимое замедление, используя расстояние до предполагаемого положения стоп-линии и скорость транспортного средства M, и управляет или помогает в замедлении, управляя приводом двигателя и тормозным приводом. Например, если сигнал светофора меняется на запрещающий (например, загорается красный сигнал) в то время, когда впереди движется другое транспортное средство, блок 14 управления транспортным средством может замедлить движение транспортного средства М таким образом, чтобы оно могло плавно остановиться позади находящегося впереди транспортного средства, останавливающегося на стоп-линии, при условии, что находящееся впереди транспортное средство останавливается в положении стоп-линии.
[0067] Кроме того, поскольку светофор на перекрестке обычно распознается быстрее, чем стоп-линия непосредственно перед перекрестком, то при приближении транспортного средства M к перекрестку блок 12 определения положения стоп-линии определяет положение стоп-линии, а затем блок 13 распознавания стоп-линии обнаруживает стоп-линию. Когда блок 13 распознавания стоп-линии обнаруживает стоп-линию, блок 14 управляет транспортным средством М, руководствуясь распознанным положением стоп-линии вместо расчетного положения стоп-линии.
[0068] Кроме того, блок 14 управления транспортным средством не обязательно должен управлять транспортным средством М. Блок 14 управления транспортным средством может предоставлять водителю только информацию о положении стоп-линии, полученную блоком 12 определения положения стоп-линии. Блок 14 управления транспортным средством может предоставлять водителю различную информацию, управляя человеко-машинным интерфейсом (ЧМИ), установленным на транспортном средстве М. Например, блок 14 управления транспортным средством может предоставлять водителю информацию, проецируя полученное положение стоп-линии на лобовое стекло транспортного средства М с помощью проекционного бортового индикатора (HUD), входящего в состав ЧМИ.
[0069] Если предполагается, что светофора будет переключен на запрещающий сигнал, и транспортное средство M должно быть быстро заторможено для остановки в полученном положении стоп-линии, блок 14 управления транспортным средством может предупреждать водителя посредством визуальной индикации, звукового сигнала, вибрации рулевого колеса и т.п. Таким образом, даже если водитель не может визуально распознать стоп-линию, можно помочь водителю остановиться в нужном месте в соответствии с изменением сигнала светофора.
Работа системы управления транспортным средством в соответствии с первым вариантом осуществления
[0070] Ниже будет раскрыта работа системы 100 управления транспортным средством согласно первому варианту осуществления изобретения со ссылкой на прилагаемые фигуры. На ФИГ. 6 изображена блок-схема, иллюстрирующая один из примеров процесса определения положения стоп-линии согласно первому варианту осуществления. Определение положения стоп-линии выполняется, например, когда транспортное средство M движется в режиме помощи при вождении или автономном режиме.
[0071] Как показано на ФИГ. 6, на этапе S10 ЭБУ 10 системы 100 управления транспортным средством определяет, распознал ли блок 11 распознавания светофоров светофор для транспортных средств перед транспортным средством M. Блок 11 распознавания светофоров распознает светофор для транспортных средств, например, по предварительно сохраненному шаблону светофора, руководствуясь снятым камерой изображением. Когда ЭБУ 10 определяет, что блок 11 распознавания светофоров обнаружил светофор для транспортных средств («да» на этапе S10), ЭБУ 10 переходит к этапу S12. Когда ЭБУ 10 определяет, что блок 11 распознавания светофоров не обнаружил светофор для транспортных средств («нет» на этапе S10), ЭБУ 10 завершает процесс.
[0072] На этапе S12 ЭБУ 10 определяет, распознал ли стоп-линию блок 13 распознавания стоп-линии. Блок 13 распознавания стоп-линии распознает стоп-линию перед транспортным средством M, основываясь на результатах обнаружения внешним датчиком 1 транспортного средства M. Когда блок 13 распознавания стоп-линии распознает стоп-линию («да» на этапе S12), ЭБУ 10 переходит к этапу S14. Если блок 13 распознавания стоп-линии не обнаруживает стоп-линию («нет» на этапе S12), то ЭБУ 10 переходит к этапу S16.
[0073] На этапе S14 блок 14 управления транспортным средством в составе ЭБУ 10 управляет транспортным средством M, основываясь на положении стоп-линии, найденном блоком 13 распознавания стоп-линии. Даже если положение стоп-линии уже было определено блоком 12 определения положения стоп-линии, блок 14 управления транспортным средством осуществляет управление транспортным средством М, например, помогает в замедлении путем назначения приоритета положению стоп-линии, найденному блоком 13 распознавания стоп-линии. После этого ЭБУ 10 завершает процесс.
[0074] На этапе S16 ЭБУ 10 определяет, распознал ли блок 11 распознавания светофоров группу светофоров перед транспортным средством M. В группу светофоров может входить скрытый светофор, или вся группа может состоять из скрытых светофоров. Когда ЭБУ 10 определяет, что блок 11 распознавания светофоров обнаружил группу светофоров («да» на этапе S16), ЭБУ 10 переходит к этапу S18. Когда ЭБУ 10 определяет, что блок 11 распознавания светофоров не обнаружил группу светофоров («нет» на этапе S16), ЭБУ 10 переходит к этапу S22.
[0075] На этапе S18 ЭБУ 10 определяет, распознал ли блок 12 определения положения стоп-линии ближайший передний и задний светофор, соответственно. Процесс распознавания ближайшего переднего и заднего светофора будет описан ниже. Если ЭБУ 10 определяет, что блок 12 определения положения стоп-линии распознал ближайший передний и задний светофор, соответственно («да» на этапе S18), ЭБУ 10 переходит к этапу S20. Если ЭБУ 10 определяет, что блок 12 определения положения стоп-линии не распознал ближайший передний и задний светофор, соответственно («нет» на этапе S18), ЭБУ 10 переходит к этапу S22.
[0076] На этапе S20 блок 12 определения положения стоп-линии в составе ЭБУ 10 определяет положение стоп-линии на втором расстоянии Xb от светофора непосредственно перед транспортным средством по направлению к транспортному средству. Второе расстояние Xb меньше первого расстояния Xa. После этого ЭБУ 10 переходит к этапу S24.
[0077] На этапе S22 блок 12 определения положения стоп-линии в составе ЭБУ 10 определяет положение стоп-линии на первом расстоянии Xa от светофора непосредственно перед транспортным средством по направлению к транспортному средству. После этого ЭБУ 10 переходит к этапу S24.
[0078] На этапе S24 блок 14 управления транспортным средством в составе ЭБУ 10 управляет транспортным средством M, основываясь на положении стоп-линии, найденном блоком 12 определения положения стоп-линии. Блок 14 управления транспортным средством осуществляет управление транспортным средством M, например, помогает в замедлении на основании найденного положения стоп-линии. После этого ЭБУ 10 завершает процесс.
[0079] На ФИГ. 7 изображена блок-схема, иллюстрирующая один из примеров процесса распознавания ближайшего переднего и заднего светофора. Как показано на ФИГ. 7, на этапе S30 блок 12 определения положения стоп-линии в составе ЭБУ 10 считает, что ближайший к транспортному средству М светофор является ближайшим передним светофором.
[0080] На этапе S32 блок 12 определения положения стоп-линии в составе ЭБУ 10 определяет наличие светофора, расстояние от которого до ближайшего переднего светофора в направлении D движения транспортного средства М меньше предельной величины Xc перекрестка. Если блок 12 определения положения стоп-линии определяет наличие светофора, расстояние от которого до ближайшего переднего светофора меньше предельной величины Xc перекрестка («да» на этапе S32), ЭБУ 10 переходит к этапу S34. Если блок 12 определения положения стоп-линии не обнаруживает светофора, расстояние от которого до ближайшего переднего светофора меньше предельной величины Xc перекрестка («нет» на этапе S32), ЭБУ 10 завершает процесс, исходя из предположения, что ближайший передний и задний светофоры не распознаны. После этого ЭБУ 10 переходит к этапу S22 (см. ФИГ. 6). Иными словами, блок 12 определения положения стоп-линии не распознает в качестве заднего светофора светофор, расстояние от которого до ближайшего переднего светофора равно или превышает эту предельную величину Xc перекрестка.
[0081] На этапе S34 блок 12 определения положения стоп-линии в составе ЭБУ 10 определяет наличие светофора, наиболее удаленного от транспортного средства M в группе светофоров, удаленных от ближайшего светофора перед транспортным средством на расстояние, меньшее этой предельной величины Xc перекрестка, и находящегося на расстоянии от промежуточного положения с ближайшим к транспортному средству светофором, равном или превышающим порог Xd приближения. Если блок 12 определения положения стоп-линии определяет наличие светофора, расстояние от которого до ближайшего переднего светофора равно или превышает порог Xd приближения («да» на этапе S34), ЭБУ 10 переходит к этапу S36. Если блок 12 определения положения стоп-линии не обнаруживает светофора, расстояние от которого до промежуточного положения равно или превышает порог Xd приближения («нет» на этапе S34), ЭБУ 10 завершает процесс, исходя из предположения, что ближайший передний и задний светофоры не распознаны. После этого ЭБУ 10 переходит к этапу S22 (см. ФИГ. 6).
[0082] Иными словами, блок 12 определения положения стоп-линии не распознает в качестве заднего светофора светофор, наиболее удаленный от транспортного средства M в группе светофоров, удаленных от ближайшего светофора перед транспортным средством на расстояние, меньшее этой предельной величины Xc перекрестка, и находящийся на расстоянии меньше порога Xd приближения от промежуточного положения с ближайшим к транспортному средству светофором.
[0083] На этапе S36 ЭБУ 10 определяет, что блок 12 определения положения стоп-линии распознал ближайший передний и задний светофор, соответственно. После этого ЭБУ 10 переходит к этапу S20 (см. ФИГ. 6).
[0084] На ФИГ. 8А изображена блок-схема, иллюстрирующая один из примеров процесса распознавания ближайшего переднего и заднего светофора, используя светофор для пешеходов. Отработка этапов S40, S44, S46 и S48 согласно ФИГ. 8A соответствует отработке этапов S30, S32, S34 и S36 согласно ФИГ. 7, соответственно.
[0085] Как показано на ФИГ. 8А, на этапе S40 блок 12 определения положения стоп-линии в составе ЭБУ 10 считает, что ближайший к транспортному средству М светофор является ближайшим передним светофором. В данном случае блок 12 определения положения стоп-линии считает ближайшим передним светофором светофор для транспортных средств, ближайший к транспортному средству М, независимо от того, распознан ли светофор для пешеходов. Впоследствии, на этапе S42, ЭБУ 10 определяет, распознал ли блок 12 определения положения стоп-линии, соответственно, светофор для пешеходов дополнительно к светофору для транспортных средств. Если ЭБУ 10 определяет, что блок 12 определения положения стоп-линии распознал светофор для пешеходов («да» на этапе S42), ЭБУ 10 переходит к этапу S44. Если ЭБУ 10 определяет, что блок 12 определения положения стоп-линии не распознал светофор для пешеходов («нет» на этапе S42), ЭБУ 10 завершает процесс. После этого, если блок 12 определения положения стоп-линии не распознал ближайший передний и задний светофор, ЭБУ 10 переходит к этапу S22 (см. ФИГ. 6).
[0086] На этапе S44 блок 12 определения положения стоп-линии в составе ЭБУ 10 определяет наличие светофора для пешеходов, расстояние от которого до ближайшего переднего светофора в направлении D движения транспортного средства М меньше предельной величины Xc перекрестка. Если блок 12 определения положения стоп-линии определяет наличие светофора для пешеходов, расстояние от которого до ближайшего переднего светофора меньше предельной величины Xc перекрестка («да» на этапе S44), ЭБУ 10 переходит к этапу S46. Если блок 12 определения положения стоп-линии не обнаруживает светофора для пешеходов, расстояние от которого до ближайшего переднего светофора меньше предельной величины Xc перекрестка («нет» на этапе S44), ЭБУ 10 завершает процесс, исходя из предположения, что ближайший передний и задний светофоры не распознаны. Иными словами, блок 12 определения положения стоп-линии не распознает в качестве заднего светофора светофор для пешеходов, расстояние от которого до ближайшего переднего светофора равно или превышает эту предельную величину Xc перекрестка. После этого, если ближайший передний и задний светофоры не распознаны, ЭБУ 10 переходит к этапу S22 (см. ФИГ. 6).
[0087] На этапе S46 блок 12 определения положения стоп-линии в составе ЭБУ 10 определяет наличие светофора для пешеходов, наиболее удаленного от транспортного средства M в группе светофоров для пешеходов, удаленных от ближайшего светофора перед транспортным средством на расстояние, меньшее этой предельной величины Xc перекрестка, и находящегося на расстоянии от промежуточного положения с ближайшим к транспортному средству светофором, равном или превышающим порог Xd приближения. Если блок 12 определения положения стоп-линии определяет наличие светофора для пешеходов, расстояние от которого до ближайшего переднего светофора равно или превышает порог Xd приближения («да» на этапе S46), ЭБУ 10 переходит к этапу S48. Если блок 12 определения положения стоп-линии не обнаруживает светофора для пешеходов, расстояние от которого до ближайшего переднего светофора равно или превышает порог Xd приближения («нет» на этапе S46), ЭБУ 10 завершает процесс. После этого, если ближайший передний и задний светофоры не распознаны, ЭБУ 10 переходит к этапу S22 (см. ФИГ. 6).
[0088] Иными словами, блок 12 определения положения стоп-линии не распознает в качестве заднего светофора светофор для пешеходов, наиболее удаленный от транспортного средства M в группе светофоров для пешеходов, удаленных от ближайшего светофора перед транспортным средством на расстояние, меньшее этой предельной величины Xc перекрестка, и находящийся на расстоянии меньше порога Xd приближения от промежуточного положения с ближайшим к транспортному средству светофором.
[0089] На этапе S48 ЭБУ 10 определяет, что блок 12 определения положения стоп-линии распознал светофор для транспортных средств в качестве ближайшего переднего светофор и светофор для пешеходов в качестве заднего светофора, соответственно. После этого ЭБУ 10 завершает процесс и переходит к этапу S20 (см. ФИГ. 6).
[0090] Кроме того, после этапа S42 ЭБУ 10 может определять, распознал ли блок 12 определения положения стоп-линии распознанный светофор для транспортных средств, расположенный перед светофором для пешеходов на расстоянии, равном или превышающем второй порог Xd2 приближения. Если ЭБУ 10 определяет, что блок 12 определения положения стоп-линии распознал светофор для транспортных средств, расположенный перед светофором для пешеходов на расстоянии, равном или превышающем второй порог Xd2 приближения, ЭБУ 10 переходит к этапу S44. Если ЭБУ 10 определяет, что блок 12 определения положения стоп-линии не распознал светофор для транспортных средств, расположенный перед светофором для пешеходов на расстоянии, равном или превышающем второй порог Xd2 приближения, ЭБУ 10 может завершить процесс.
[0091] На ФИГ. 8B изображена блок-схема, иллюстрирующая один из примеров процесса определения положения скрытого светофора. Определение положения скрытого светофора выполняется при определении положения стоп-линии.
[0092] Как показано на ФИГ. 8B, на этапе S50 ЭБУ 10 определяет, скрыт ли светофор, распознанный блоком 11 распознавания светофоров. Если уже распознанный светофор оказывается скрытым находящимся впереди транспортным средством большой высоты или иным препятствием, ЭБУ 10 определяет, что распознанный светофор скрыт. Если будет определено, что светофор скрыт («да» на этапе S50), ЭБУ 10 переходит к этапу S52. Если будет определено, что светофор не скрыт («нет» на этапе S50), ЭБУ 10 завершает процесс.
[0093] На этапе S52 блок 11 распознавания светофоров в составе ЭБУ 10 определяет положение скрытого светофора. Блок 11 распознавания светофоров определяет положение скрытого светофора на основании положения скрытого светофора на момент его распознавания и изменения положения транспортного средства М. Когда транспортное средство М пройдет найденное положение скрытого светофора (скрытый светофор более не находится перед транспортным средством М), блок 11 распознавания светофоров завершает определение.
[0094] Если обнаружено несколько светофоров и распознан ближайший передний и задний светофор на основании относительного расположения светофоров, система 100 управления транспортным средством (устройство 101 определения положения стоп-линии) согласно раскрытому выше первому варианту осуществления определяет, что стоп-линия на перекрестке находится на втором расстоянии Xb (которое короче первого расстояния Xa) от светофора непосредственно перед транспортным средством по направлению к транспортному средству. Таким образом, система 100 управления транспортным средством позволяет надлежащим образом определить положение стоп-линии на перекрестке по сравнению с ситуацией, в которой стоп-линия считается всегда находящейся на определенном расстоянии от ближайшего к транспортному средству M светофора по направлению к транспортному средству, и при этом неясно, установлен ли этот светофор непосредственно перед перекрестком или за перекрестком.
[0095] Учитывая случай, в котором стоп-линия считается всегда находящейся на определенном расстоянии от ближайшего к транспортному средству M светофора по направлению к транспортному средству, ближайшим к транспортному средству M светофором может являться светофор, установленный в задней части перекрестка. Таким образом, в данном случае можно считать, что определенное расстояние достаточно для того, чтобы избежать ошибочного определения положения стоп-линии в пределах перекрестка. Тем не менее, если ближайший к транспортному средству М светофор установлен непосредственно перед перекрестком, согласно этому методу можно предположить, что стоп-линия находится дальше от перекрестка, чем необходимо, и поэтому управление транспортным средством может быть неудобным для пассажиров, включая водителя. Напротив, при распознавании ближайшего переднего и заднего светофора система 100 управления транспортным средством позволяет определить положение стоп-линии на небольшом расстоянии (второе расстояние Xb) от ближайшего переднего светофора, так как определение выполняется по светофору непосредственно перед перекрестком. Таким образом, система 100 управления транспортным средством позволяет управлять транспортным средством, например, замедлять и останавливать транспортное средство M, руководствуясь соответствующим найденным положением стоп-линии, таким образом, чтобы управление транспортным средством было менее неудобным для пассажиров, включая водителя.
[0096] Кроме того, система 100 управления транспортным средством, выполняя определение с использованием той же предельной величины Xc перекрестка, когда несколько перекрестков последовательно расположены в направлении D движения транспортного средства М, позволяет исключить ошибочное распознавание светофора на втором перекрестке перед транспортным средством М в качестве заднего сигнала светофора на первом перекрестке перед транспортным средством M. Кроме того, система 100 управления транспортным средством, выполняя определение с использованием порога Xd приближения, когда светофоры установлены в соответствующих полосах непосредственно перед перекрестком на многополосной дороге, позволяет исключить ошибочное распознавание группы светофоров непосредственно перед перекрестком в качестве комбинации ближайшего переднего и заднего светофора.
[0097] Поскольку положение скрытого светофора, оказавшегося скрытым после распознавания, может быть определено, система 100 управления транспортным средством на основании положения скрытого светофора может распознавать ближайший передний и задний светофор, даже если фактически можно распознать только один светофор.
[0098] Даже если не распознана группа светофоров для транспортных средств, и распознан, по меньшей мере, один светофор для транспортных средств и, по меньшей мере, один светофор для пешеходов, система 100 управления транспортным средством позволяет распознать ближайший передний и задний светофор на основании взаимного расположения светофоров для транспортных средств и пешеходов.
Второй вариант осуществления
[0099] Ниже будет раскрыта система управления транспортным средством согласно второму варианту осуществления изобретения со ссылкой на прилагаемые фигуры. На ФИГ. 9 изображена блок-схема, иллюстрирующая пример системы управления транспортным средством в соответствии со вторым вариантом осуществления. Система 200 управления транспортным средством, изображенная на ФИГ. 9, содержит устройство 201 определения положения стоп-линии. Система 200 управления транспортным средством (устройство 201 определения положения стоп-линии) отличается от первого варианта осуществления тем, что она распознает зону перекрестка по результатам обнаружения внешним датчиком 1 транспортного средства M и распознает ближайший передний светофор, используя зону перекрестка. Компоненты, совпадающие с первым вариантом осуществления, имеют такие же ссылочные обозначения, и их раскрытие не будет приводиться повторно.
Конфигурация системы управления транспортным средством в соответствии со вторым вариантом осуществления
[0100] Как показано на ФИГ. 9, ЭБУ 20 системы 200 управления транспортным средством отличается от первого варианта осуществления наличием блока 21 распознавания зоны перекрестка и измененной функцией блока определения положения стоп-линии. Во втором варианте осуществления устройство 201 определения положения стоп-линии содержит блок 11 распознавания светофоров, блок 13 распознавания стоп-линии, блок 21 распознавания зоны перекрестка и блок 22 определения положения стоп-линии.
[0101] Блок 21 распознавания зоны перекрестка распознает зону перекрестка, в которой полоса движения транспортного средства М прерывается в направлении D движения транспортного средства М, по результатам обнаружения внешним датчиком 1 транспортного средства М. Зоной перекрестка является зона, которую можно считать перекрестком на основании факта прерывания полосы движения.
[0102] Блок 21 распознавания зоны перекрестка распознает конечный участок, на котором прерывается полоса движения, например, на основании снятого камерой изображения или информации об объекте (белой линии), обнаруженном радиолокационным датчиком. Если длина конечной части линии полосы движения равна или превышает порог определения перекрестка, блок 21 распознавания зоны перекрестка считает зоной перекрестка участок, находящийся перед конечной частью полосы движения. Порог определения перекрестка задан предварительно. Если блок 21 распознавания зоны перекрестка распознает не только конечную часть (конечную точку) полосы движения непосредственно перед перекрестком, но и конечную часть (начальную точку) полосы движения в задней части перекрестка, он может распознавать зону перекрестка при условии, что расстояние от конечной до начальной точки полосы движения равно или превышает порог определения перекрестка.
[0103] Кроме того, блок 21 распознавания зоны перекрестка может распознавать зону перекрестка в случае обнаружения дороги, пересекающей дорогу, по которой движется транспортное средство М. Блок 21 распознавания зоны перекрестка может распознавать конечную часть полосы движения дороги, пересекающей дорогу, по которой движется транспортное средство M, и использовать ее для распознавания зоны перекрестка.
[0104] На ФИГ. 10 изображен план перекрестка, описывающий один из примеров распознавания ближайшего переднего светофора, используя зону перекрестка. На ФИГ. 10 изображен перекресток C6, полоса L движения дороги R, по которой движется транспортное средство M, конечная точка Le полосы L движения, начальная точка Ls полосы L движения, порог Xe определения перекрестка, зона AR перекрестка и светофор T8 непосредственно перед перекрестком C6. В данном случае предполагается, что стоп-линия истерта и не может быть обнаружена.
[0105] В примере согласно ФИГ. 10 блок 21 распознавания зоны перекрестка обнаруживает зону AR перекрестка на основании того факта, что полоса L движения прерывается в направлении D движения транспортного средства M, а расстояние от конечной точки Le до начальной точки Ls равно или превышает порог Xe определения перекрестка. Более того, при наличии нескольких полос движения блок 21 распознавания зоны перекрестка не должен считать зоной перекрестка зону, в которой продолжается хотя бы одна полоса движения. Напротив, блок 21 распознавания зоны перекрестка может считать зоной AR перекрестка зону, в которой прерываются все полосы движения.
[0106] Когда блок 11 распознавания светофоров для транспортных средств обнаруживает светофор для транспортных средств перед транспортным средством M, блок 22 определения положения стоп-линии определяет положение стоп-линии на основании положения светофора для транспортных средств. Если, например, блок 11 распознавания светофоров обнаруживает только один светофор для транспортных средств, блок 22 определения положения стоп-линии, по существу, определяет положение стоп-линии на первом расстоянии Xa от светофора для транспортных средств по направлению к транспортному средству.
[0107] Когда блок 11 распознавания светофоров обнаруживает светофор для транспортных средств, а блок 21 распознавания зоны перекрестка обнаруживает зону перекрестка, блок 22 определения положения стоп-линии определяет наличие светофора для транспортных средств со стороны транспортного средства в зоне перекрестка. При обнаружении светофора для транспортных средств со стороны транспортного средства в зоне перекрестка блок 22 определения положения стоп-линии считает, что стоп-линия находится на третьем расстоянии от ближайшего к транспортному средству М светофора для транспортных средств по направлению к транспортному средству.
[0108] Третье расстояние задано предварительно и меньше первого расстояния. Поскольку блок 22 определения положения стоп-линии выполняет определение по ближайшему переднему светофору, а не заднему светофору, то можно предотвратить ошибочное определение стоп-линии в пределах перекрестка, даже если третье расстояние невелико. Третье расстояние может составлять от 1 до 15 м. Третье расстояние может составлять, например, 10 м. Третье расстояние может отличаться от второго расстояния Xb в первом варианте осуществления или совпадать с ним.
Процесс определения положения стоп-линии в соответствии со вторым вариантом осуществления
[0109] На ФИГ. 11 изображена блок-схема, иллюстрирующая один из примеров процесса определения положения стоп-линии согласно второму варианту осуществления. Поскольку этапы S60, S62 и S64 согласно ФИГ. 11 аналогичны этапам S10, S12 и S14 согласно ФИГ. 6, повторное раскрытие этих этапов будет опущено. Раскрытие продолжится с этапа S66.
[0110] Как показано на ФИГ. 11, на этапе S66 ЭБУ 20 системы 200 управления транспортным средством определяет, распознал ли зону перекрестка блок 21 распознавания зоны перекрестка. Блок 21 распознавания зоны перекрестка распознает зону перекрестка, в которой полоса движения транспортного средства М прерывается в направлении D движения транспортного средства М, по результатам обнаружения внешним датчиком 1 транспортного средства М. Когда ЭБУ 20 определяет, что блок 21 распознавания зоны перекрестка обнаружил зону перекрестка («да» на этапе S66), ЭБУ 20 переходит к этапу S68. Когда ЭБУ 20 определяет, что блок 21 распознавания зоны перекрестка не распознал зону перекрестка («нет» на этапе S66), ЭБУ 20 переходит к этапу S72.
[0111] На этапе S68 блок 22 определения положения стоп-линии в составе ЭБУ 20 определяет наличие светофора для транспортных средств со стороны транспортного средства в зоне перекрестка. Когда блок 22 определения положения стоп-линии определяет, что со стороны транспортного средства в зоне перекрестка имеется светофор для транспортных средств («да» на этапе S68), ЭБУ 20 переходит к этапу S70. Когда блок 22 определения положения стоп-линии определяет, что со стороны транспортного средства в зоне перекрестка нет светофора для транспортных средств («нет» на этапе S68), ЭБУ 20 переходит к этапу S72.
[0112] На этапе S70 блок 22 определения положения стоп-линии в составе ЭБУ 20 предполагает, что стоп-линия находится на третьем расстоянии Xf от светофора непосредственно перед транспортным средством по направлению к транспортному средству. Третье расстояние Xf меньше первого расстояния Xa. После этого ЭБУ 20 переходит к этапу S74.
[0113] На этапе S72 блок 22 определения положения стоп-линии в составе ЭБУ 20 определяет положение стоп-линии на первом расстоянии Xa от светофора непосредственно перед транспортным средством по направлению к транспортному средству. После этого ЭБУ 20 переходит к этапу S74.
[0114] На этапе S74 блок 14 управления транспортным средством в составе ЭБУ 20 управляет транспортным средством M, основываясь на положении стоп-линии, найденном блоком 22 определения положения стоп-линии. Блок 14 управления транспортным средством осуществляет управление транспортным средством M, например, помогает в замедлении на основании найденного положения стоп-линии. После этого ЭБУ 20 завершает процесс.
[0115] Если светофор для транспортных средств и зона перекрестка распознаны, и ближайший к транспортному средству M светофор для транспортных средств находится в зоне перекрестка на стороне транспортного средства, система 200 управления транспортным средством (устройство 201 определения положения стоп-линии) согласно раскрытому выше второму варианту осуществления определяет положение стоп-линии на третьем расстоянии Xf от ближайшего к транспортному средству M светофора для транспортных средств по направлению к транспортному средству, причем третье расстояние меньше первого расстояния Xa. Таким образом, система 200 управления транспортным средством позволяет надлежащим образом определить положение стоп-линии на перекрестке по сравнению с ситуацией, в которой стоп-линия считается всегда находящейся на определенном расстоянии от ближайшего к транспортному средству M светофора по направлению к транспортному средству, и при этом неясно, установлен ли этот светофор непосредственно перед перекрестком или за перекрестком. В результате, подобно первому варианту осуществления, система 200 управления транспортным средством позволяет управлять транспортным средством, например, замедлять и останавливать транспортное средство M, руководствуясь соответствующим найденным положением стоп-линии, таким образом, чтобы управление транспортным средством было менее неудобным для пассажиров, включая водителя.
[0116] Выше были раскрыты варианты осуществления настоящего изобретения, не носящие ограничительного характера. Настоящее изобретение может быть реализовано специалистом в данной области в различных модифицированных и усовершенствованных аспектах, включая раскрытый выше вариант осуществления.
[0117] Например, первый и второй варианты осуществления могут быть объединены. Функция системы 200 управления транспортным средством в соответствии со вторым вариантом осуществления может быть реализована в системе 100 управления транспортным средством в соответствии с первым вариантом осуществления.
[0118] Устройства 101, 201 определения положения стоп-линии не обязательно должны входить в состав системы управления транспортным средством. Устройства 101, 201 определения положения стоп-линии могут быть выполнены как единый блок. Устройства 101, 201 определения положения стоп-линии не обязательно устанавливать на транспортном средстве М; они могут быть установлены на сервере, выполненном с возможностью обмена данными с транспортным средством М.
[0119] Система 100 управления транспортным средством (устройство 101 определения положения стоп-линии ) может содержать блок распознавания перекрестков, распознающий перекресток перед транспортным средством М на основании картографической информации и положения транспортного средства М на карте. Положение транспортного средства на карте можно определить с помощью глобальной системы позиционирования (GPS), глобальной навигационной спутниковой системы (ГЛОНАСС), системы одновременной локализации и картографирования (SLAM) и других систем. Дополнительно к способу согласно вышеизложенным вариантам осуществления система 100 управления транспортным средством может использовать результаты распознавания блоком распознавания перекрестков для обнаружения ближайшего переднего светофора.
[0120] Системы 100, 200 управления транспортным средством (устройства 101, 201 определения положения стоп-линии) не обязательно должны содержать устройство 13 распознавания стоп-линии. Системы 100, 200 управления транспортным средством могут определять только светофоры.
[0121] Блок 12 определения положения стоп-линии не обязательно должен выполнять обработку (например, этап S34 на ФИГ. 7) с использованием порога Xd приближения. В альтернативном варианте блок 12 определения положения стоп-линии может быть выполнен таким образом, чтобы он не распознавал в качестве заднего светофора светофор, расстояние от которого до ближайшего переднего светофора в направлении D движения транспортного средства M меньше установленного порогового значения, на основании ближайшего переднего светофора, а не промежуточного положения. Установленный порог задан предварительно. Кроме того, блок 12 определения положения стоп-линии не обязательно должен выполнять обработку (например, этап S32 на ФИГ. 7) с использованием той же предельной величины Xc перекрестка. Блок 12 определения положения стоп-линии может быть выполнен с возможностью обработки с использованием той же предельной величины Xc перекрестка для светофора для транспортных средств, установленного на перекрестке, а не для светофора для пешеходов, установленного на перекрестке. То же самое относится к обработке с использованием порога Xd приближения.
[0122] Блок 12 определения положения стоп-линии не обязательно должен определять положение скрытого светофора. Блок 12 определения положения стоп-линии может быть выполнен с возможностью перехода к этапу S18 только в том случае, если несколько светофоров может быть одновременно распознано на этапе S16 согласно ФИГ. 6. Блок 12 определения положения стоп-линии может быть выполнен с возможностью перехода к этапу S44 только в том случае, если светофоры для транспортных средств и пешеходов одновременно распознаны на этапе S42 согласно ФИГ. 8A.
[0123] Блок 11 распознавания светофоров не обязательно должен распознавать светофор для пешеходов. Блок 11 распознавания светофоров может быть выполнен с возможностью распознавания только светофора для транспортных средств. Кроме того, блок 12 определения положения стоп-линии не обязательно должен распознавать ближайший передний и задний светофоры, используя светофоры для пешеходов. Блок 12 определения положения стоп-линии может быть выполнен с возможностью использования только светофора для транспортных средств.
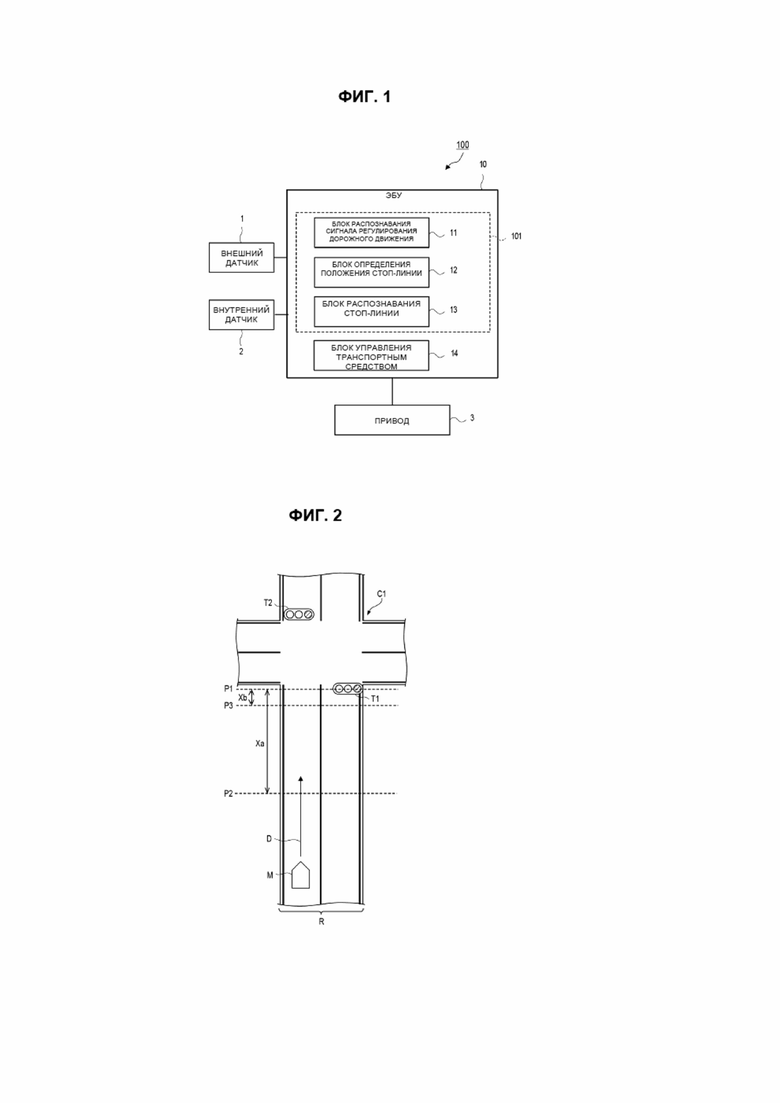
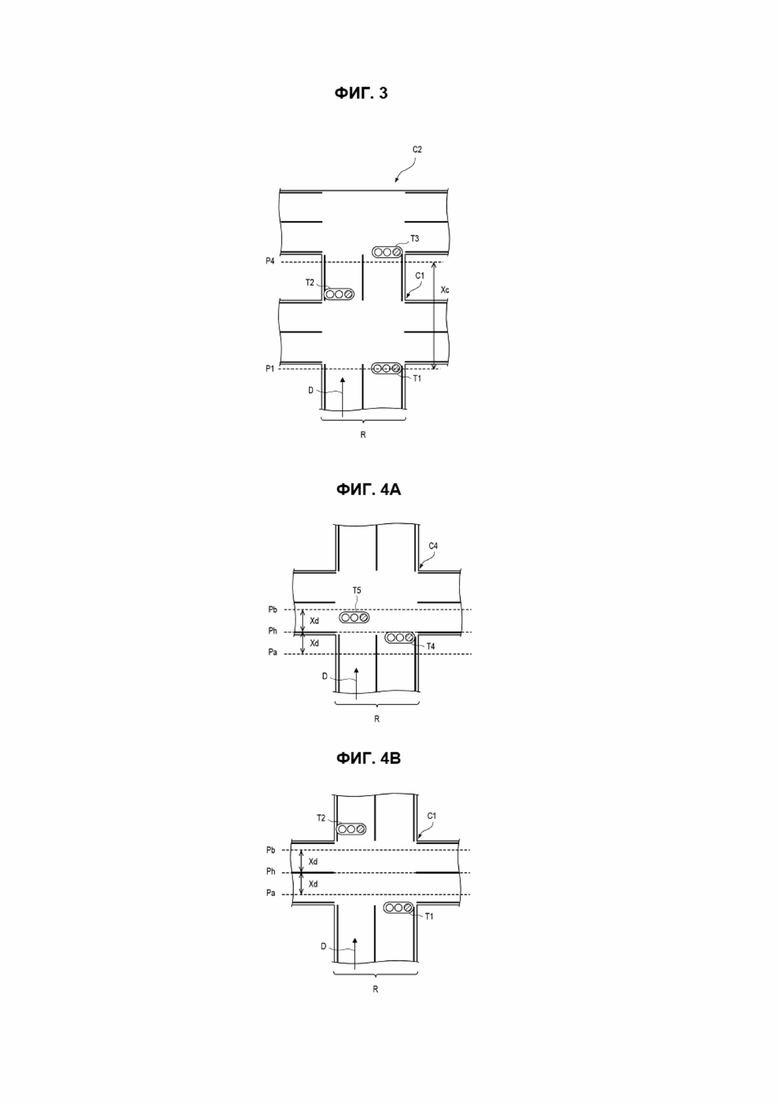
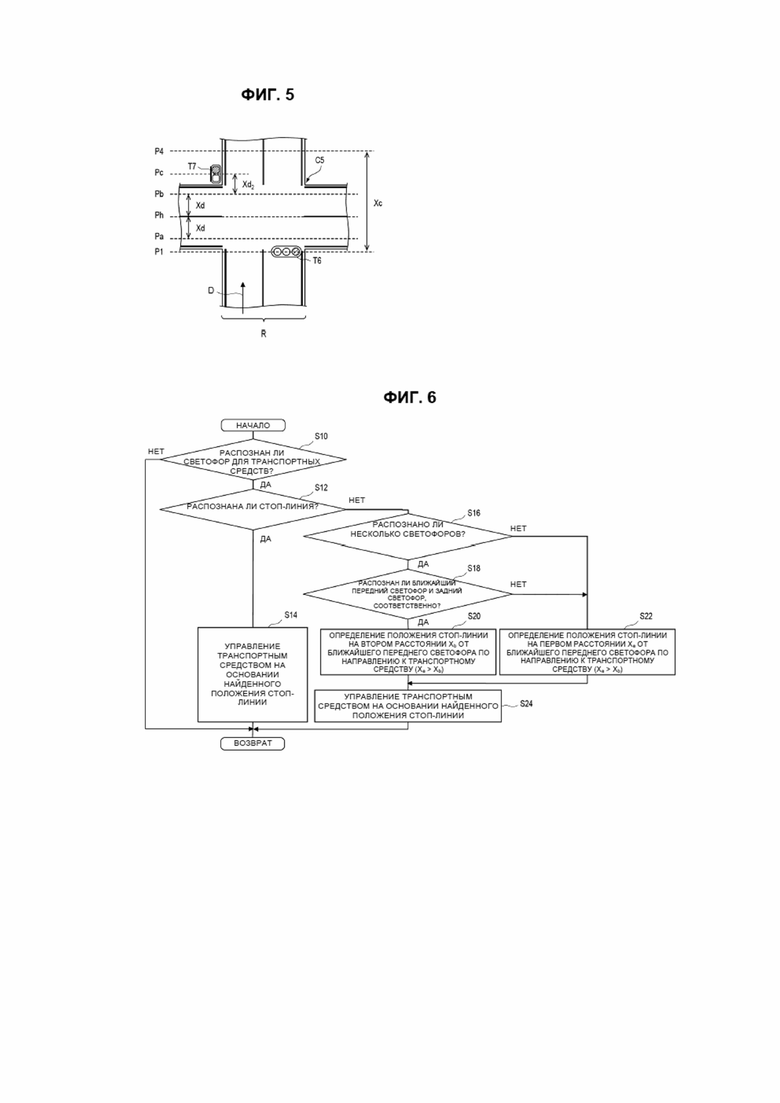
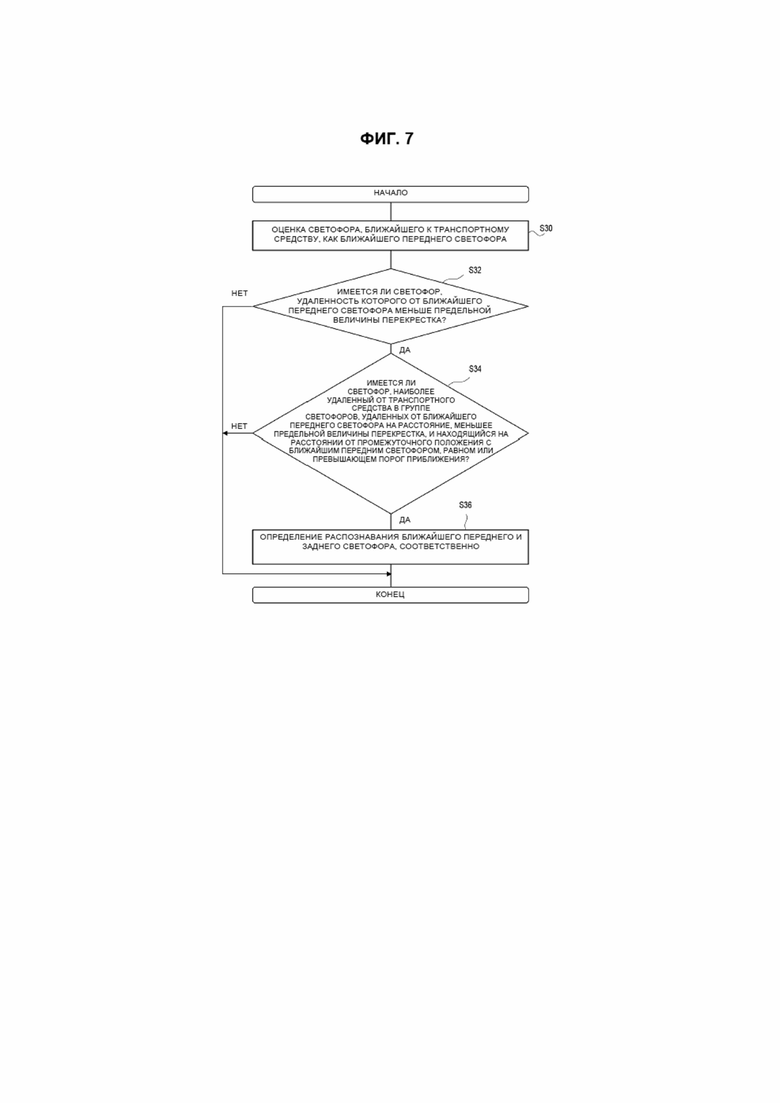
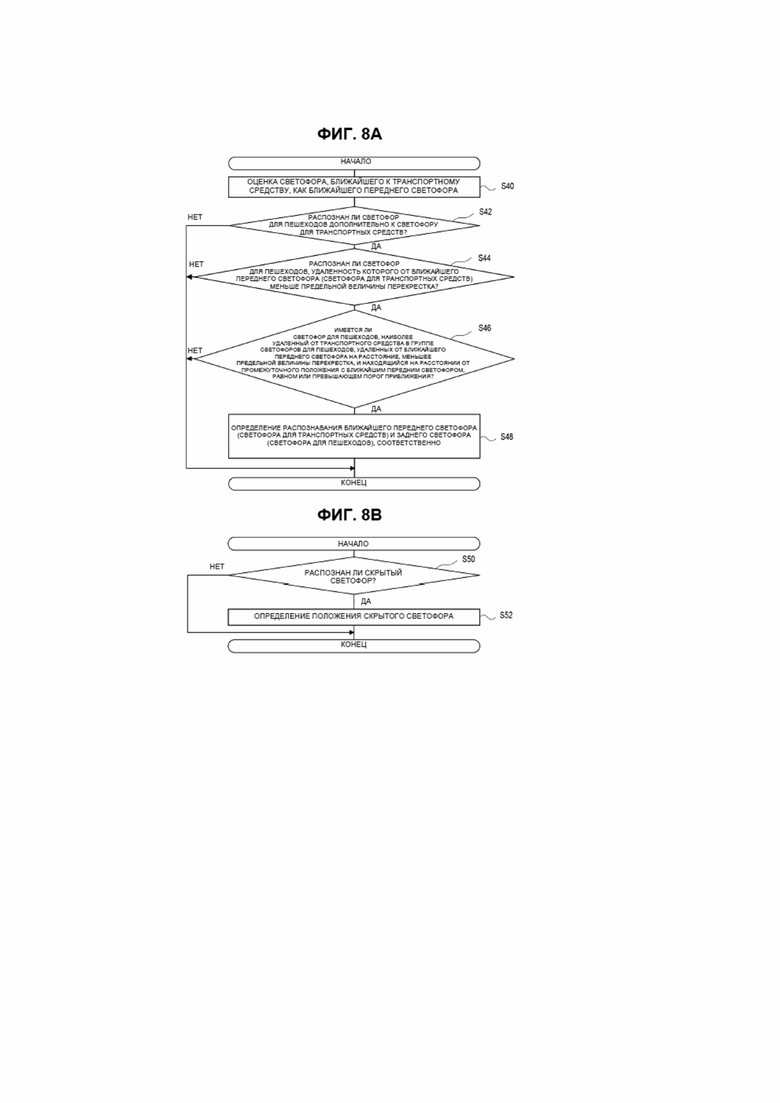
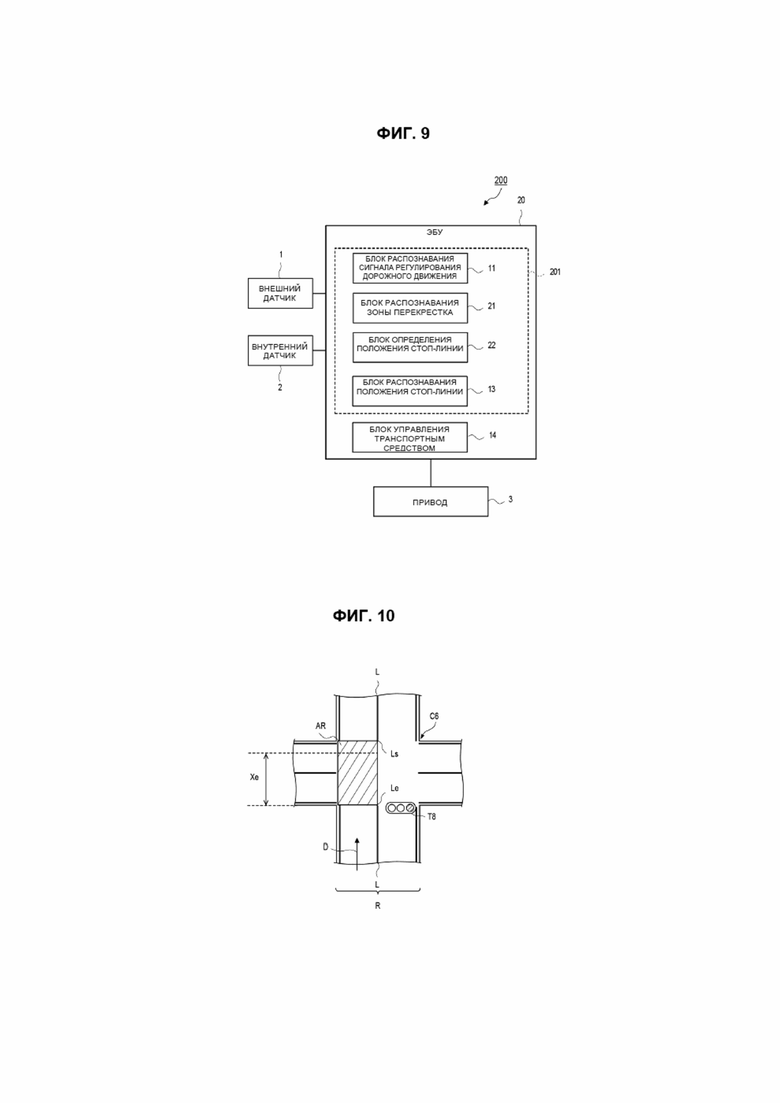
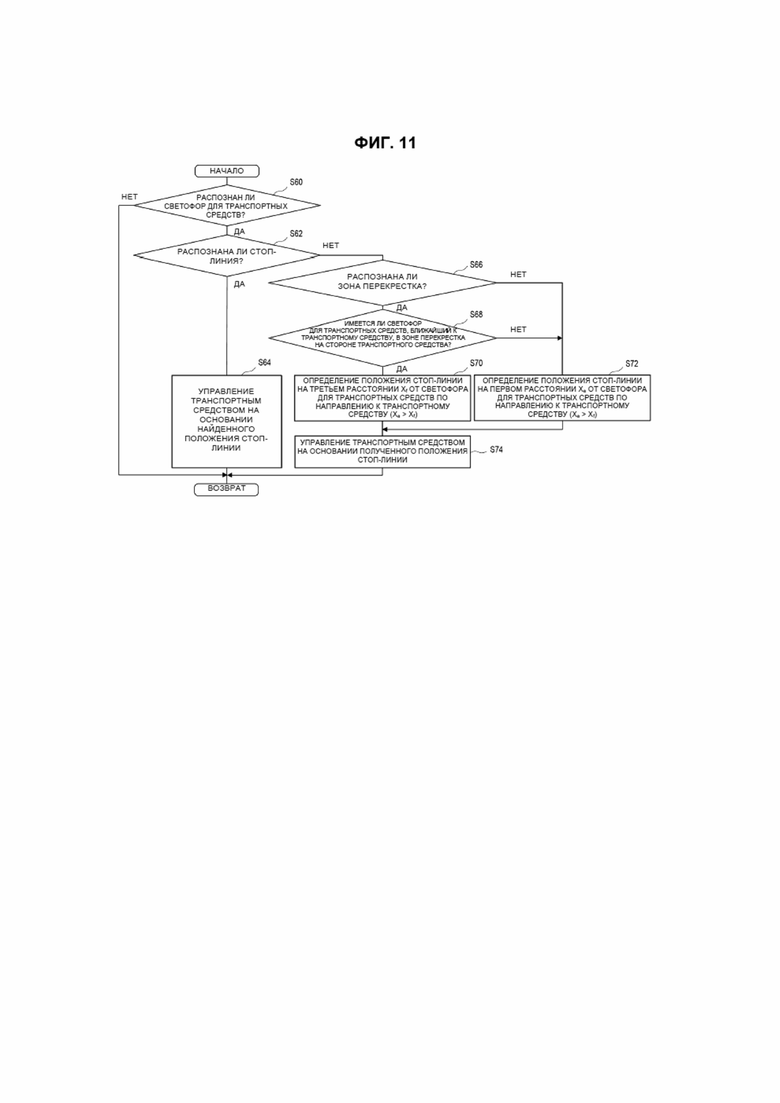
Изобретение относится к устройству определения положения стоп-линии. Устройство определения положения стоп-линии содержит блок распознавания светофоров, выполненный с возможностью распознавания светофора на перекрестке перед транспортным средством, и блок определения положения стоп-линии, выполненный с возможностью определения положения стоп-линии на первом расстоянии от светофора по направлению к транспортному средству. Если блок распознавания светофоров обнаруживает группу светофоров, а блок определения положения стоп-линии обнаруживает ближайший передний светофор и задний светофор, исходя из относительного расположения группы светофоров, определения положения стоп-линии на втором расстоянии от ближайшего переднего светофора по направлению к транспортному средству, причем второе расстояние меньше первого расстояния, ближайший передний светофор - это светофор со стороны транспортного средства, ближайший к транспортному средству. Система управления транспортным средством содержит блок распознавания светофоров, блок определения положения стоп-линии и блок управления транспортным средством, выполненный с возможностью управления транспортным средством на основании положения стоп-линии, найденного блоком определения положения стоп-линии. Достигается повышение безопасности. 3 н. и 4 з.п. ф-лы, 13 ил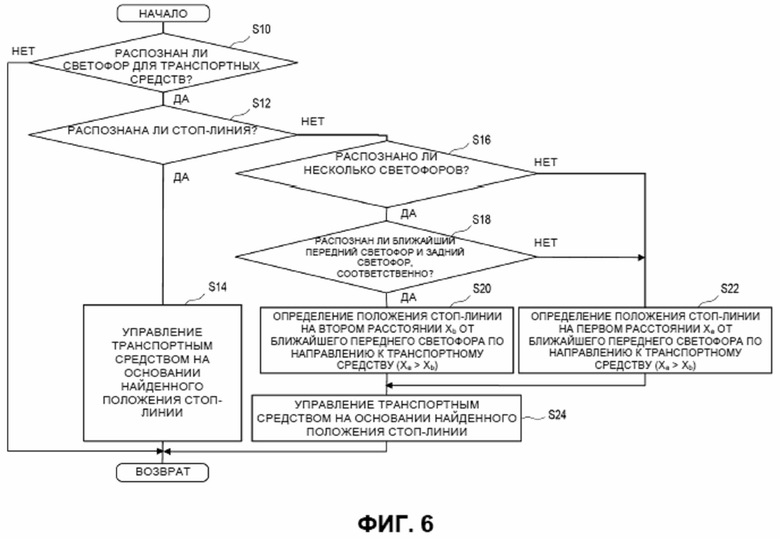
1. Устройство определения положения стоп-линии, содержащее:
блок распознавания светофоров, выполненный с возможностью распознавания светофора на перекрестке перед транспортным средством на основании результатов распознавания внешним датчиком транспортного средства; и
блок определения положения стоп-линии, выполненный с возможностью
определения положения стоп-линии на первом расстоянии от светофора по направлению к транспортному средству, и
если блок распознавания светофоров обнаруживает группу светофоров, а блок определения положения стоп-линии обнаруживает ближайший передний светофор и задний светофор, исходя из относительного расположения группы светофоров, определения положения стоп-линии на втором расстоянии от ближайшего переднего светофора по направлению к транспортному средству, причем второе расстояние меньше первого расстояния, ближайший передний светофор - это светофор со стороны транспортного средства, ближайший к транспортному средству, а задний светофор - это светофор на дальней стороне перекрестка.
2. Устройство определения положения стоп-линии по п. 1, в котором устройство определения положения стоп-линии выполнено таким образом, чтобы при обнаружении нескольких светофоров оно не распознавало в качестве заднего светофора тот светофор, расстояние до которого от ближайшего спереди светофора в направлении движения транспортного средства равно или превышает предельную величину перекрестка.
3. Устройство определения положения стоп-линии по п. 2, в котором:
блок определения положения стоп-линии выполнен таким образом, чтобы он не распознавал первый светофор, удаленность которого от промежуточного положения меньше порога приближения, в качестве заднего светофора, если имеются светофоры, удаленные от ближайшего переднего светофора в направлении движения транспортного средства на расстояние, меньшее предельной величины перекрестка, причем под промежуточным положением понимают положение между ближайшим светофором перед транспортным средством и светофором, наиболее удаленным от транспортного средства, в группе светофоров, удаленных от ближайшего светофора перед транспортным средством на расстояние, меньшее предельной величины перекрестка.
4. Устройство определения положения стоп-линии по одному из пп. 1-3, в котором:
блок распознавания светофоров выполнен с возможностью определения положения скрытого светофора на основании положения скрытого светофора в момент его распознавания и изменения положения транспортного средства, причем скрытый светофор находится в скрытом состоянии после распознавания; и
блок определения положения стоп-линии выполнен с возможностью определения положения стоп-линии на втором расстоянии от ближайшего переднего светофора по направлению к транспортному средству, если блок распознавания светофоров обнаруживает группу светофоров со скрытым светофором перед транспортным средством, а блок определения положения стоп-линии распознает ближайший передний и задний светофоры.
5. Устройство определения положения стоп-линии по одному из пп. 1-3, в котором:
блок распознавания светофоров выполнен с возможностью распознавания светофоров для транспортных средств и пешеходов; и
блок определения положения стоп-линии выполнен с возможностью определения положения стоп-линии на втором расстоянии от ближайшего переднего светофора по направлению к транспортному средству, если блок распознавания светофоров обнаруживает, по меньшей мере, один светофор для транспортных средств и, по меньшей мере, один светофор для пешеходов в качестве группы светофоров, а блок определения положения стоп-линии распознает светофор для транспортных средств в качестве ближайшего переднего светофора, а светофор для пешеходов в качестве заднего светофора, основываясь на взаимном расположении светофоров для транспортных средств и пешеходов.
6. Устройство определения положения стоп-линии, содержащее:
блок распознавания светофоров, выполненный с возможностью распознавания светофора для транспортных средств на перекрестке перед транспортным средством на основании результатов распознавания внешним датчиком транспортного средства;
блок распознавания зоны перекрестка, выполненный с возможностью распознавания зоны перекрестка по результатам обнаружения внешним датчиком, в котором полоса движения дороги, по которой движется транспортное средство, прерывается в направлении движения транспортного средства; и
блок определения положения стоп-линии, выполненный с возможностью
определения положения стоп-линии на первом расстоянии от светофора для транспортных средств по направлению к транспортному средству, и
определения положения стоп-линии на третьем расстоянии от ближайшего к транспортному средству светофора для транспортных средств по направлению к транспортному средству, причем третье расстояние меньше первого расстояния, если блок распознавания светофоров обнаруживает светофор для транспортных средств, блок распознавания зоны перекрестка обнаруживает зону перекрестка, а светофор для транспортных средств находится в зоне перекрестка на стороне транспортного средства.
7. Система управления транспортным средством, содержащая:
блок распознавания светофоров, выполненный с возможностью распознавания светофора на перекрестке перед транспортным средством на основании результатов распознавания внешним датчиком транспортного средства;
блок определения положения стоп-линии, выполненный с возможностью
определения положения стоп-линии на первом расстоянии от светофора по направлению к транспортному средству, и
если блок распознавания светофоров обнаруживает группу светофоров, а блок определения положения стоп-линии обнаруживает ближайший передний светофор и задний светофор, исходя из относительного расположения группы светофоров, определения положения стоп-линии на втором расстоянии от ближайшего переднего светофора по направлению к транспортному средству, причем второе расстояние меньше первого расстояния, ближайший передний светофор – светофор со стороны транспортного средства, ближайший к транспортному средству, а задний светофор – светофор на дальней стороне перекрестка; и
блок управления транспортным средством, выполненный с возможностью управления транспортным средством на основании положения стоп-линии, найденного блоком определения положения стоп-линии, и результатов обнаружения внешним датчиком.
| US 9472097 B2, 18.10.2016 | |||
| US 2016318490 A1, 03.11.2016 | |||
| CN 104882008 B, 11.05.2016. |

