ОБЛАСТЬ ТЕХНИКИ
[0001] Настоящее изобретение относится к способу установки пути движения и устройству установки пути движения.
УРОВЕНЬ ТЕХНИКИ
[0002] Чтобы помочь водителю в вождении транспортного средства, путь движения рассматриваемого транспортного средства определяется на основе расстояния до соседнего транспортного средства, когда транспортное средство движется по соседней полосе движения. Например, в документе WO2018-047291A раскрыта методика предотвращения приближения другого транспортного средства к рассматриваемому транспортному средству посредством установки пути движения таким образом, чтобы обеспечивалось расстояние между транспортными средствами в направлении вперед-назад, чтобы предотвратить движение рассматриваемого транспортного средства и другого транспортного средства параллельно, когда впереди на пути движения рассматриваемого транспортного средства есть поворот, а другое транспортное средство движется по соседней полосе движения.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
[0003] Однако трудно применить методику, раскрытую в WO2018-047291A, когда множество транспортных средств, движущихся параллельно в поперечном направлении, совершают поворот на перекрестке через другую полосу движения, например, при повороте направо через встречную полосу движения или пересекающую полосу движения, существующую с правой стороны в условиях левостороннего движения. То есть, например, если рассматриваемое транспортное средство и другое транспортное средство останавливаются бок о бок в поперечном направлении на перекрестке, ожидая сигнала светофора, а затем транспортные средства начинают движение и поворачивают, необходимо задержать начало движения рассматриваемого транспортного средства, чтобы обеспечить заданное расстояние между транспортными средствами в направлении вперед-назад между рассматриваемым транспортным средством и другим транспортным средством, движущимся параллельно. Это может затруднить достижение плавного вождения.
[0004] Задачей настоящего изобретения является обеспечение способа установки пути движения и системы установки пути движения, способных предотвращать приближение другого транспортного средства к рассматриваемому транспортному средству, когда множество транспортных средств, движущихся параллельно в поперечном направлении, совершают поворот, как описано выше.
[0005] Одним аспектом настоящего изобретения является способ установки пути движения для транспортного средства, в котором установленный путь движения рассматриваемого транспортного средства включает в себя путь движения, который поворачивает через другую полосу движения на перекрестке, и упомянутый способ установки пути движения выполнен с возможностью установки пути движения для поворота транспортного средства во внутреннюю сторону направления поворота, когда соседнее транспортное средство находится в пределах заданного расстояния за пределами пути движения рассматриваемого транспортного средства в направлении поворота, по сравнению со случаем, когда нет соседнего транспортного средства.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
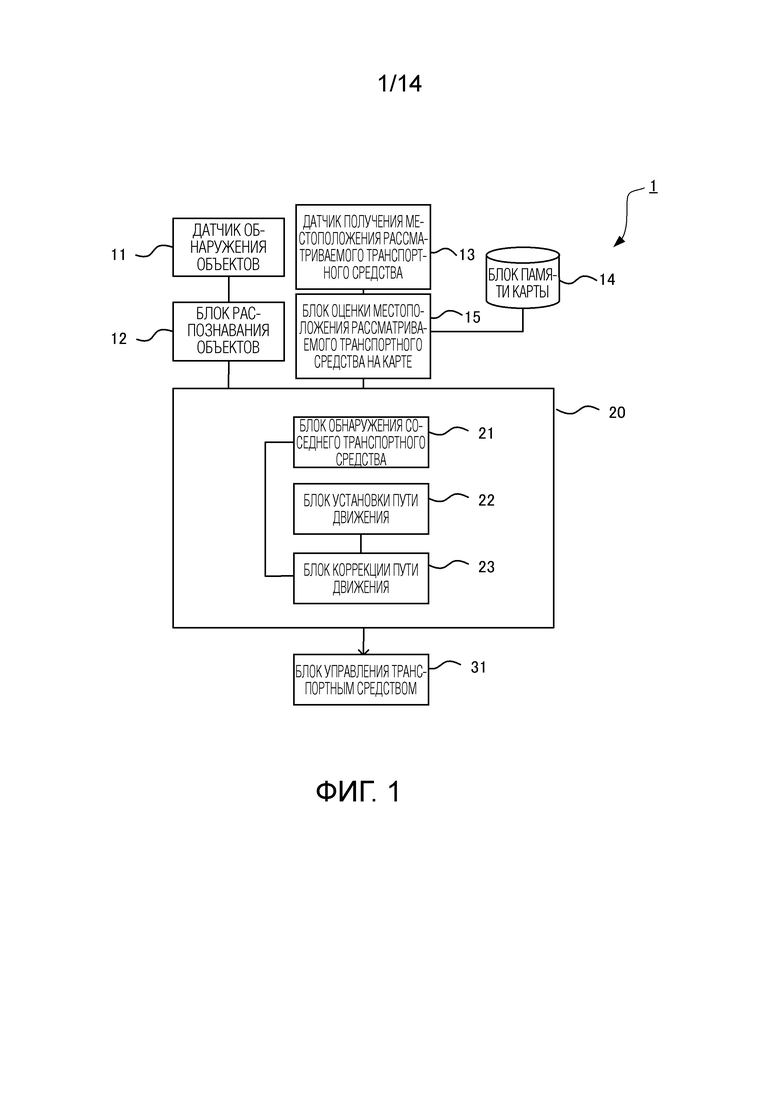
[0006] Фиг. 1 представляет собой блок-схему конфигурации, иллюстрирующую устройство помощи водителю в соответствии с первым вариантом осуществления.
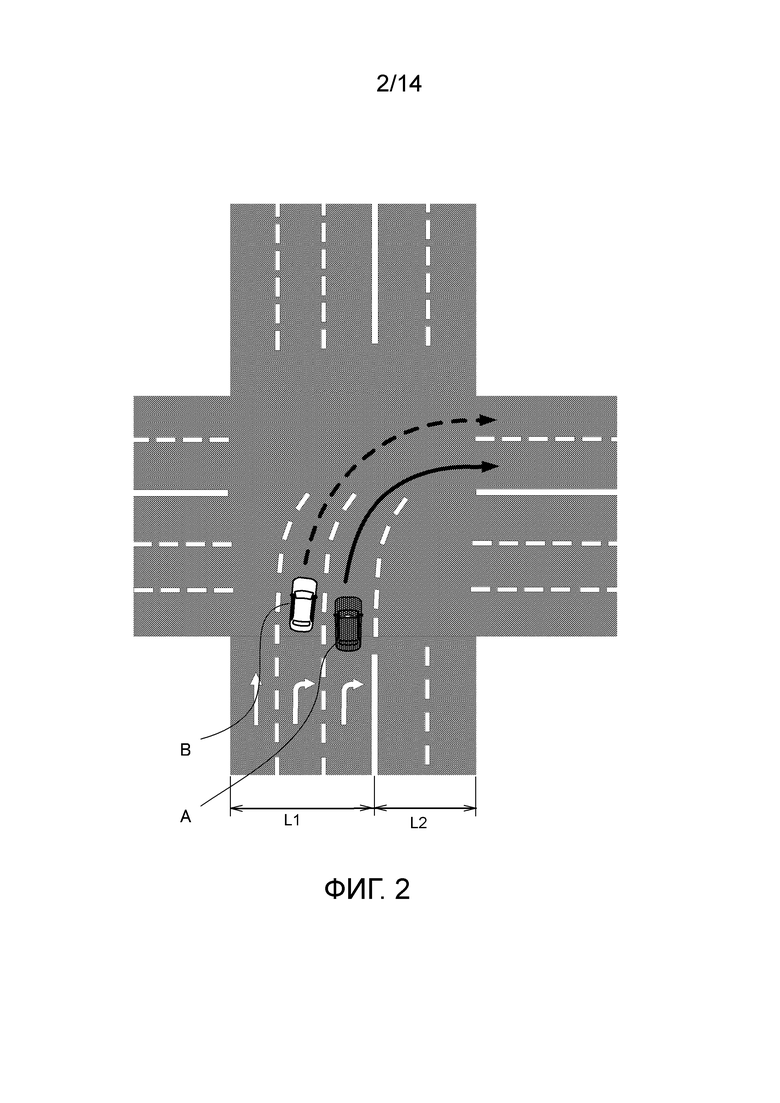
Фиг. 2 представляет собой схему, иллюстрирующую состояние движения транспортного средства, когда путь движения скорректирован.
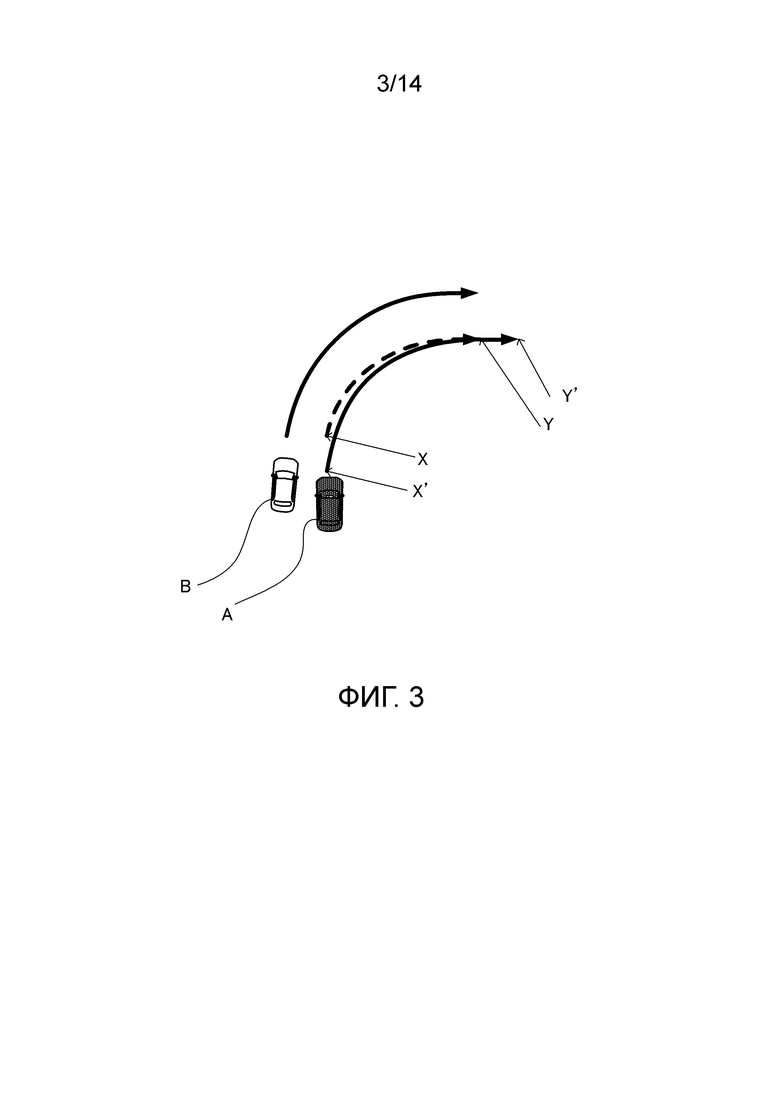
Фиг. 3 представляет собой схему, иллюстрирующую пример коррекции пути движения.
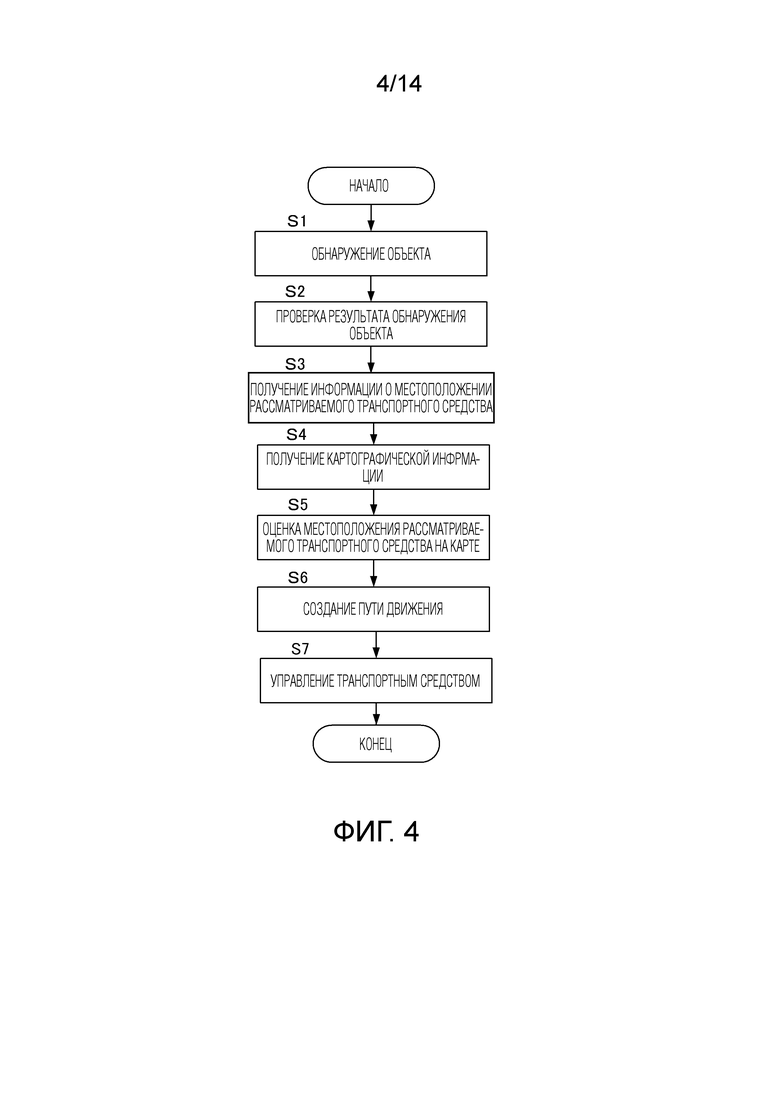
Фиг. 4 представляет собой блок-схему последовательности операций, иллюстрирующую управление помощью водителю.
Фиг. 5 представляет собой блок-схему последовательности операций, иллюстрирующую подробности управления созданием пути движения.
Фиг. 6 представляет собой блок-схему конфигурации, иллюстрирующую устройство помощи водителю в соответствии со вторым вариантом осуществления.
Фиг. 7 представляет собой блок-схему последовательности операций, иллюстрирующую управление помощью водителю.
Фиг. 8 представляет собой блок-схему конфигурации, иллюстрирующую устройство помощи водителю в соответствии с третьим вариантом осуществления.
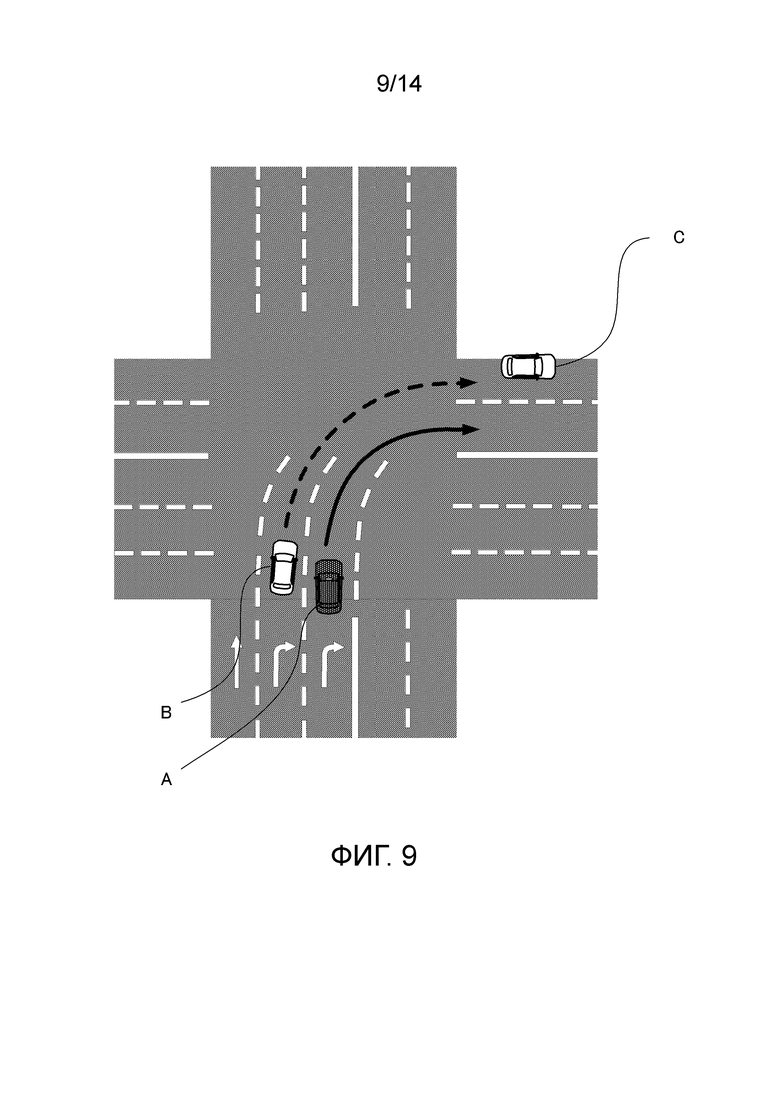
Фиг. 9 представляет собой схему, иллюстрирующую состояние движения транспортного средства, когда путь движения скорректирован.
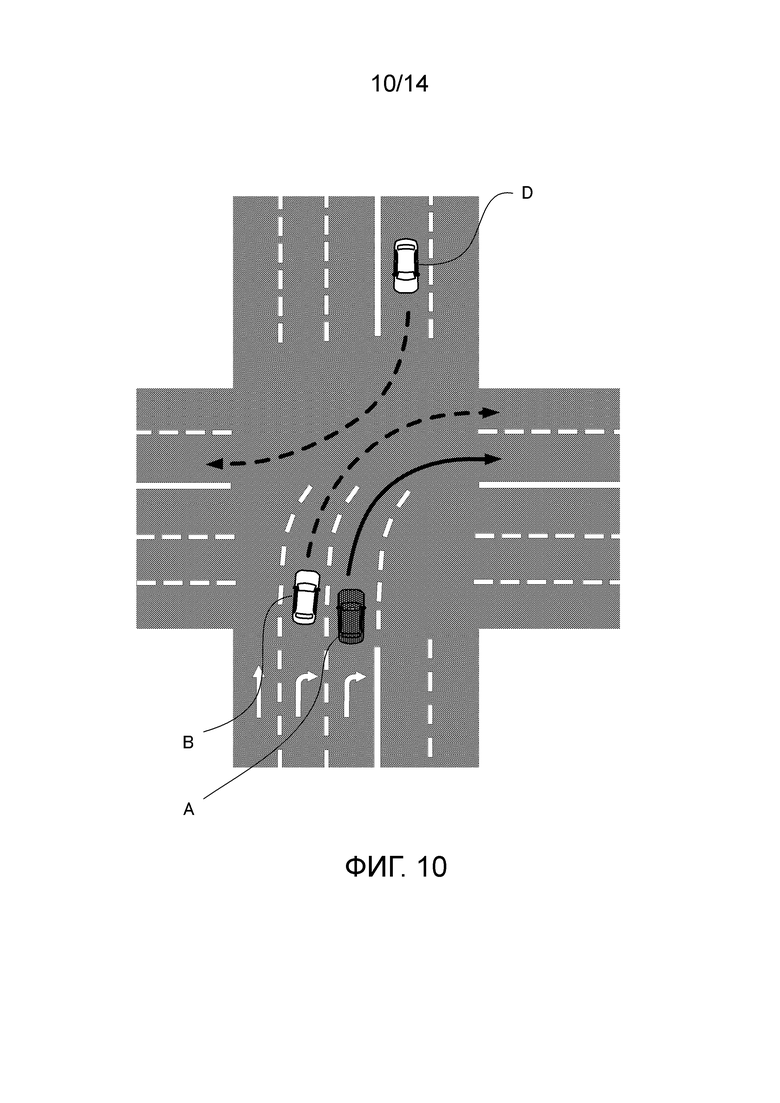
Фиг. 10 представляет собой схему, иллюстрирующую состояние движения транспортного средства, когда путь движения скорректирован.
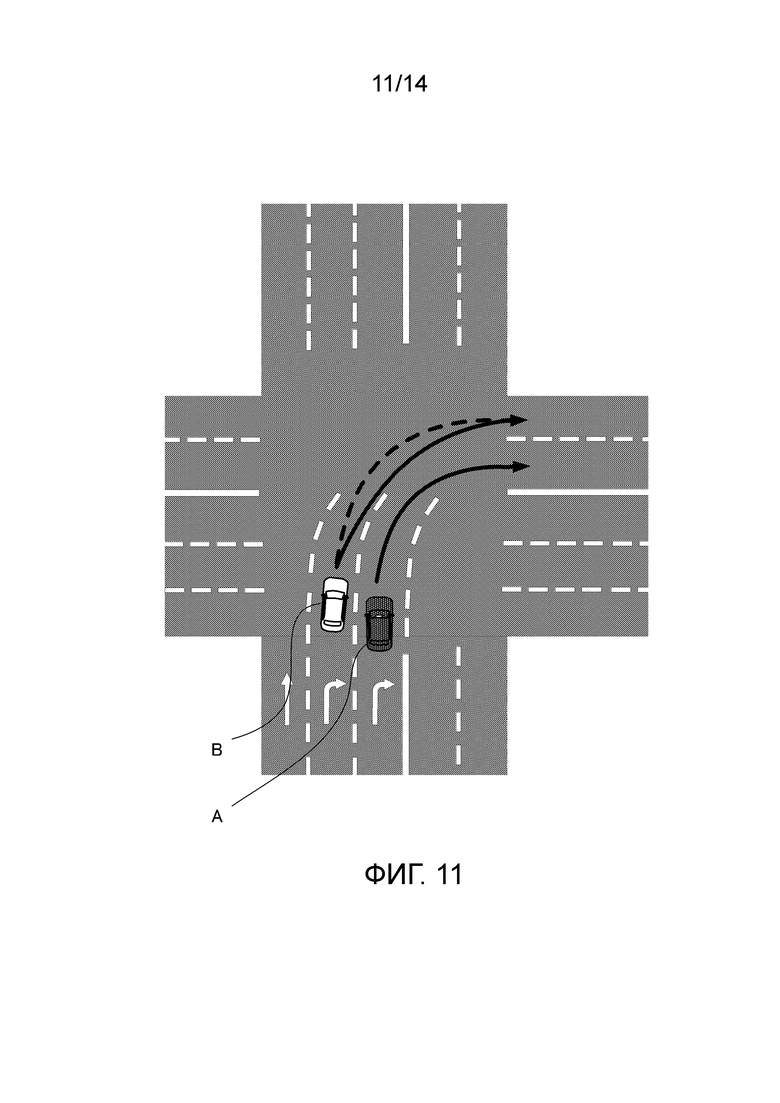
Фиг. 11 представляет собой схему, иллюстрирующую состояние движения транспортного средства, когда путь движения скорректирован.
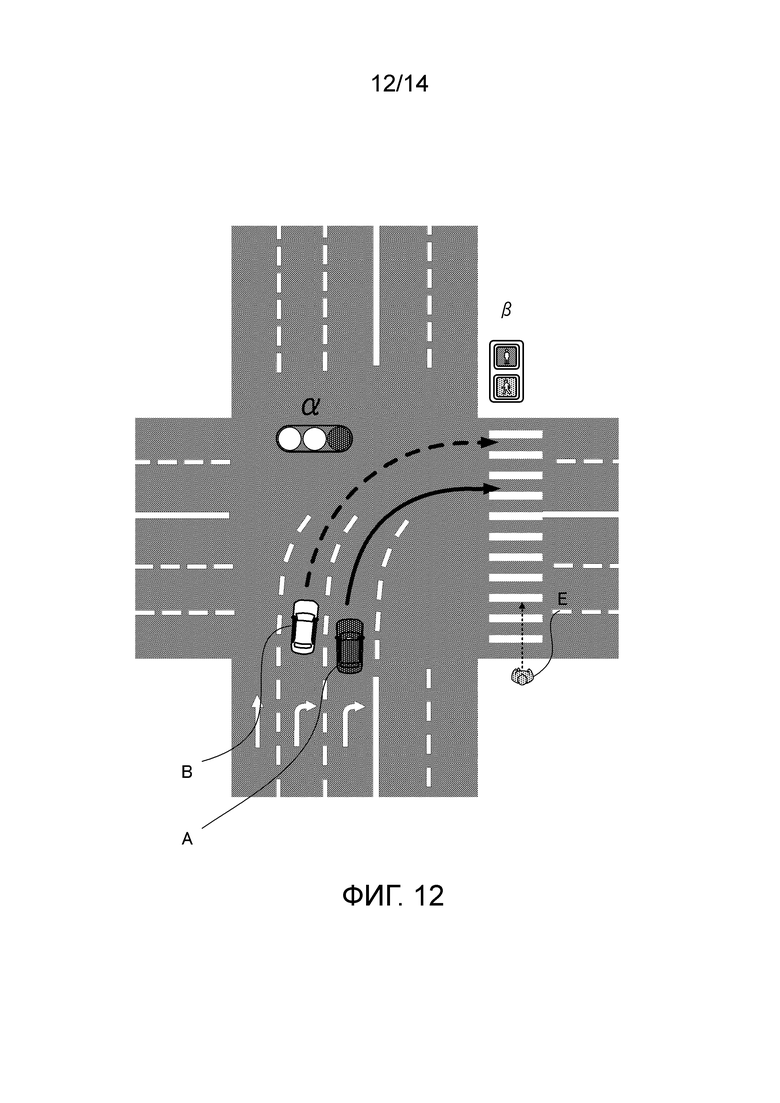
Фиг. 12 представляет собой схему, иллюстрирующую состояние движения транспортного средства, когда путь движения скорректирован.
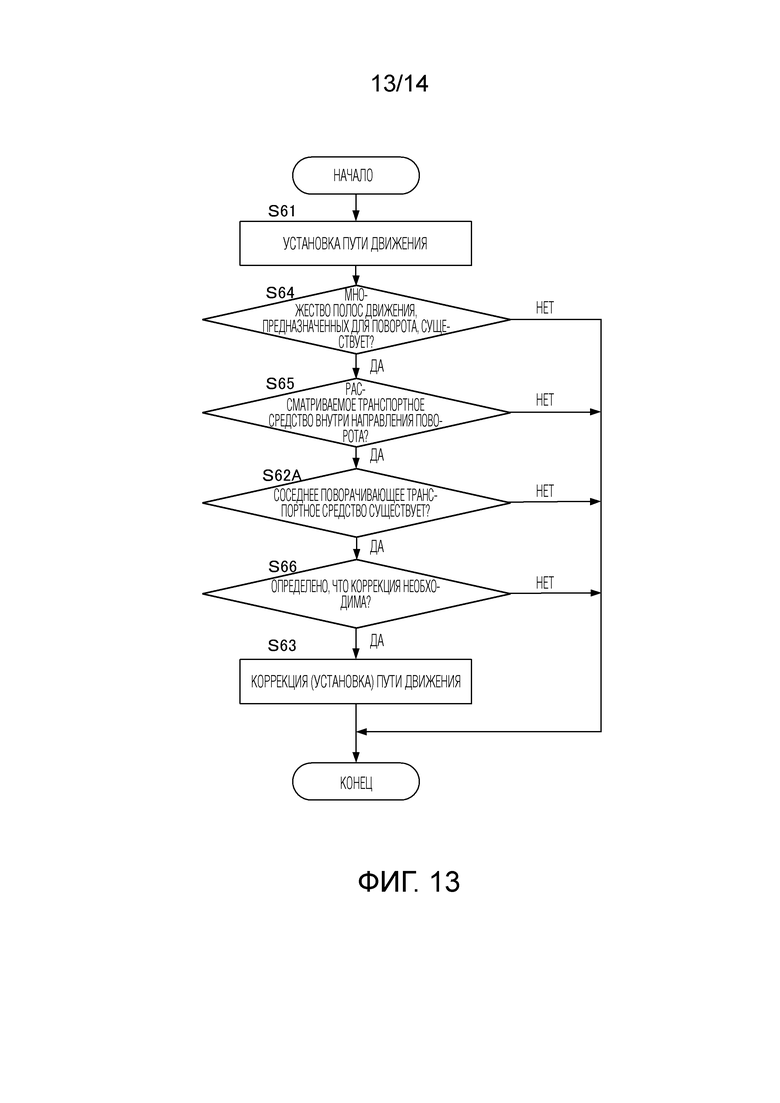
Фиг. 13 представляет собой блок-схему последовательности операций, иллюстрирующую управление помощью водителю.
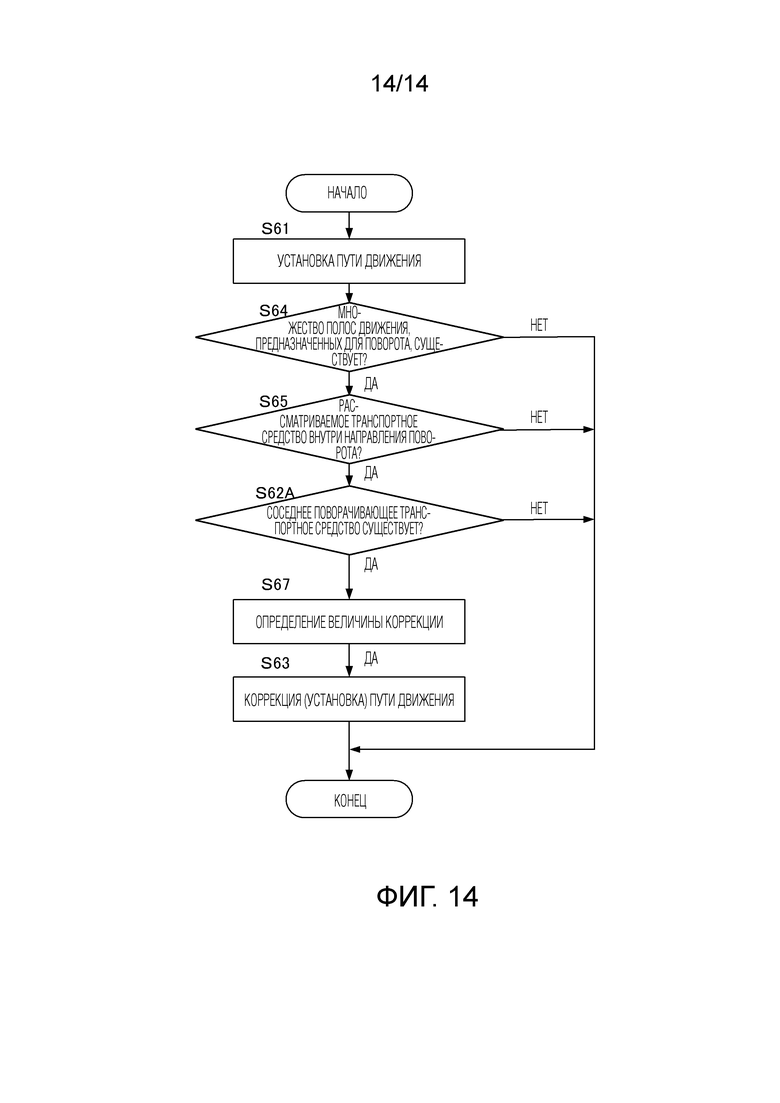
Фиг. 14 представляет собой блок-схему последовательности операций, иллюстрирующую управление помощью водителю в соответствии с четвертым вариантом осуществления.
ОПИСАНИЕ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ
[0007] Далее варианты осуществления настоящего изобретения будут описаны со ссылкой на прилагаемые чертежи и т.п. Следует отметить, что понятие «помощь водителю» в данном документе включает в себя управление движением транспортного средства для помощи водителю транспортного средства в части операции вождения (уровни автономного вождения с 1 по 4), а также включает в себя управление движением транспортного средства без каких-либо операций водителя (уровень автономного вождения 5).
[0008] Кроме того, в последующем описании вариантов осуществления предполагается, что левая полоса движения является полосой движения по направлению движения, а правая полоса движения является встречной полосой движения в правилах дорожного движения (то есть правила дорожного движения для движения транспортных средств основаны на условиях левостороннего движения). Таким образом, из левых и правых поворотов на перекрестке правым поворотом является поворот, пересекающий полосу движения, проходящую прямо вперед, встречного транспортного средства. В качестве альтернативы, поворот, пересекающий другую полосу движения, такую как полоса движения, пересекающая рассматриваемую полосу движения с правого направления, является правым поворотом. Напротив, поворот, не пересекающий встречную полосу движения на перекрестке и примыкающий к полосе движения, пересекающей рассматриваемую полосу движения с правого направления, то есть поворот, который не пересекает другую полосу движения, является левым поворотом. В правилах дорожного движения, когда правая полоса движения является полосой движения по направлению движения, а левая полоса движения является встречной полосой движения (то есть, когда правила дорожного движения для движения транспортных средств основаны на условиях правостороннего движения), поворот, который пересекает другую полосу движения полоса движения является левым поворотом.
[0009] <Первый вариант осуществления>
Фиг. 1 представляет собой блок-схему конфигурации, иллюстрирующую устройство 1 помощи водителю в соответствии с этим вариантом осуществления. Следует отметить, что устройство 1 помощи водителю установлено на транспортном средстве или т.п. для обнаружения окружающей среды рассматриваемого транспортного средства и оценки условий движения на основе обнаруженной информации об окружающей среде. Кроме того, устройство 1 помощи водителю выполняет ускорение/замедление, смену полосы движения или т.п. или помогает в их выполнении на основе результата оценки условий движения. Устройство 1 помощи водителю может выполнять помощь при вождении, отображая путь движения на мониторе или т.п.
[0010] Устройство 1 помощи водителю имеет датчик 11 обнаружения объектов, блок 12 распознавания объектов, датчик 13 получения местоположения рассматриваемого транспортного средства, блок 14 памяти карты, блок 15 оценки местоположения рассматриваемого транспортного средства на карте, блок 20 создания пути движения и блок 31 управления транспортным средством.
[0011] В примере этого варианта осуществления часть элементов устройства 1 помощи водителю, например, блок 12 распознавания объектов, блок 14 памяти карты, блок 15 оценки местоположения рассматриваемого транспортного средства на карте, блок 20 создания пути движения и блок 31 управления транспортным средством включены в единый контроллер. Контроллер включает в себя компьютер, имеющий центральный процессор (ЦП), постоянное запоминающее устройство (ПЗУ), оперативное запоминающее устройство (ОЗМ) и интерфейс ввода/вывода (интерфейс I/O). Следует отметить, что контроллер может быть единым устройством или может быть разделен на множество блоков, и каждая обработка в этом варианте осуществления может выполняться распределенным образом множеством блоков.
[0012] Далее будет подробно описана каждая конфигурация устройства 1 помощи водителю.
[0013] Датчик 11 обнаружения объектов получает местоположение, направление движения, размер, скорость или т.п. объекта (такого как транспортное средство, мотоцикл, пешеход и препятствие), существующего вокруг рассматриваемого транспортного средства. Следует отметить, что датчик 11 обнаружения объектов включает в себя лидар (обнаружение и определение дальности с помощью света), радар миллиметрового диапазона, камеру или т.п. Результат обнаружения объекта от датчика 11 обнаружения объектов содержит местоположение, направление движения, размер, скорость или т.п. объекта на поверхности дороги, по которой движется рассматриваемое транспортное средство. Датчик 11 обнаружения объектов выдает результат обнаружения объекта в блок 12 распознавания объектов.
[0014] Блок 12 распознавания объектов исправляет ошибку в датчике, используя результат обнаружения объекта от датчика 11 обнаружения объектов, чтобы получить правдоподобные местоположение, направление движения, размер, скорость или т.п. так, чтобы минимизировать ошибку для каждого объекта в результате обнаружения. Кроме того, блок 12 распознавания объектов проверяет (ассоциирует) идентичность объекта в результате обнаружения в разные моменты времени и оценивает скорость объекта на основе ассоциации. Блок 12 распознавания объектов выводит результат распознавания, такой как местоположение, направление движения, размер или скорость объекта, существующего вокруг рассматриваемого транспортного средства, в блок 20 создания пути движения. Результат распознавания от блока 12 распознавания объектов предоставляется с использованием относительных координат по отношению к рассматриваемому транспортному средству.
[0015] Датчик 13 получения местоположения рассматриваемого транспортного средства измеряет абсолютное местоположение, направление движения, скорость или т.п. рассматриваемого транспортного средства с помощью датчика, который измеряет абсолютное местоположение, такого как GPS (глобальная система позиционирования), одометр или т.п. Датчик 13 получения местоположения рассматриваемого транспортного средства выводит информацию о местоположении рассматриваемого транспортного средства в блок 15 оценки местоположения рассматриваемого транспортного средства на карте.
[0016] Блок 14 памяти карты хранит высокоточные картографические данные и предоставляет картографическую информацию, такую как абсолютные местоположения бордюров или полос движения, или отношения соединения полос движения и относительные взаимные расположения полос движения, из высокоточных картографических данных. Блок 14 памяти карты выводит сохраненную картографическую информацию в блок 15 оценки местоположения рассматриваемого транспортного средства на карте.
[0017] Блок 15 оценки местоположения рассматриваемого транспортного средства на карте оценивает местоположение рассматриваемого транспортного средства на карте на основе информации о местоположении рассматриваемого транспортного средства, полученной датчиком 13 получения местоположения рассматриваемого транспортного средства, и картографической информации, хранящейся в блоке 14 памяти карты. Блок 15 оценки местоположения рассматриваемого транспортного средства на карте выводит информацию о местоположении рассматриваемого транспортного средства на карте в блок 20 создания пути движения.
[0018] Блок 20 создания пути движения создает путь движения, по которому рассматриваемое транспортное средство будет двигаться в будущем от текущего местоположения к целевому местоположению, используя результат распознавания от блока 12 распознавания объектов и информацию о местоположении рассматриваемого транспортного средства на карте, полученную блоком 15 оценки местоположения рассматриваемого транспортного средства на карте. Кроме того, блок 20 создания пути движения корректирует путь движения во внутреннюю сторону направления поворота в следующей ситуации, показанной на фиг. 2. Следует отметить, что целевое местоположение может быть пунктом назначения, установленным заранее находящимся в транспортном средстве человеком или т.п., или может быть целевым местоположением на пути, который необходимо пройти до достижения пункта назначения.
[0019] Фиг. 2 представляет собой схему, иллюстрирующую состояние движения транспортного средства, когда путь движения скорректирован.
[0020] Обращаясь к фиг. 2, полосы движения, проходящие в направлении вверх-вниз на поверхности бумаги, и полосы движения, проходящие в направлении влево-вправо, пересекаются на перекрестке. Среди полос движения, проходящих в направлении вверх-вниз, три полосы L1 движения с левой стороны являются полосами движения по направлению движения, а две полосы L2 движения с правой стороны являются встречными полосами движения. Предполагается, что перед перекрестком две полосы L1 движения справа из трех полос L1 движения по направлению движения являются полосами движения, предназначенными для правого поворота, (далее также именуемые «полосами движения для правого поворота») для поворота через встречную полосу движения и полосами пересекающими в правом направлении. Рассматриваемое транспортное средство «А» движется по внутренней стороне (правой стороне) двух полос движения для правого поворота в направлении поворота, а другое транспортное средство «В» движется по внешней стороне (левой стороне) в направлении поворота. Другое транспортное средство В находится в пределах заданного расстояния с внешней стороны направления поворота на пути поворота рассматриваемого транспортного средства А и в дальнейшем упоминается как «соседнее поворачивающее транспортное средство В».
[0021] Когда и рассматриваемое транспортное средство A, и соседнее поворачивающее транспортное средство B поворачивают направо, соседнее поворачивающее транспортное средство B может приближаться к рассматриваемому транспортному средству A. Поэтому в полосе движения рассматриваемого транспортного средства A блок 20 создания пути движения корректирует путь движения во внутреннюю сторону направления поворота по отношению к пути движения, используемому в случае, когда соседнее поворачивающее транспортное средство B не существует.
[0022] Фиг. 3 представляет собой схему, иллюстрирующую пример способа коррекции пути движения. На этом чертеже показаны только рассматриваемое транспортное средство А и соседнее поворачивающее транспортное средство В, показанное на фиг. 2, и показаны поворотные участки путей движения этих транспортных средств при повороте направо. Для рассматриваемого транспортного средства А путь движения, установленный до коррекции, обозначен пунктирной линией, а скорректированные пути движения обозначены сплошными линиями.
[0023] Что касается пути движения рассматриваемого транспортного средства А, когда соседнее поворачивающее транспортное средство В существует, местоположение X начала поворота в заданном пути движения в случае, когда соседнее поворачивающее транспортное средство В не существует, корректируется на X’ перед направлением движения. Кроме того, местоположение Y конца поворота корректируется на местоположение Y’ в сторону пункта назначения в направлении движения. Затем путь движения устанавливается таким образом, чтобы минимизировать изменение радиуса поворота между местоположениями X’ и Y’.
[0024] Следует отметить, что на этом чертеже путь поворота между местоположением начала поворота и местоположением конца поворота обозначена квадрантом. Однако настоящее изобретение не ограничено этим. Местоположение начала поворота может быть определено дорожной конструкцией, такой как дорожный знак или боковой бордюр, для направления пути движения правого поворота на перекрестке. Кроме того, местоположение конца поворота может быть определено начальной точкой целевой полосы движения поворота. Таким образом, когда соседнее поворачивающее транспортное средство B существует, возможно уменьшить риск приближения соседнего поворачивающего транспортного средства B к рассматриваемому транспортному средству A путем коррекции пути движения, установленной в случае, когда соседнее поворачивающее транспортное средство B не существует.
[0025] Обращаясь снова к фиг. 1, блок 20 создания пути движения имеет блок 21 обнаружения соседнего транспортного средства, блок 22 установки пути движения и блок 23 коррекции пути движения.
[0026] Блок 21 обнаружения соседнего транспортного средства обнаруживает другое транспортное средство, существующее в пределах заданного расстояния с внешней стороны (с левой стороны) направления поворота, в качестве соседнего транспортного средства на основе результата распознавания от блока 12 распознавания объектов, когда рассматриваемое транспортное средство поворачивает направо через встречную полосу движения. Следует отметить, что блок 21 обнаружения соседнего транспортного средства может также обнаруживать другое транспортное средство, существующее в пределах заданного расстояния с внешней стороны в направлении поворота рассматриваемого транспортного средства и с передней стороны по отношению к направлению движения, в качестве соседнего транспортного средства.
[0027] Обнаружение соседнего транспортного средства с использованием блока 21 обнаружения соседнего транспортного средства выполняется, когда рассматриваемое транспортное средство движется вблизи стоп-линии перед въездом на перекресток. Следует отметить, что обнаружение соседнего транспортного средства может также выполняться при остановке транспортного средства на стоп-линии на основании стоп-сигнала светофора.
[0028] Блок 22 установки пути движения получает картографическую информацию, хранящуюся в блоке 14 памяти карты, и информацию о местоположении рассматриваемого транспортного средства на карте, полученную от блока 15 оценки местоположения рассматриваемого транспортного средства на карте. Блок 22 установки пути движения устанавливает путь движения для каждой полосы движения от текущего местоположения рассматриваемого транспортного средства до целевого местоположения с использованием пункта назначения на карте, установленного находящимся в транспортном средстве человеком или т.п., и информации о местоположении рассматриваемого транспортного средства на карте. Кроме того, блок 22 установки пути движения устанавливает путь движения на перекрестке таким образом, чтобы уменьшить изменение радиуса поворота.
[0029] Когда блок 22 установки пути движения не может получить картографическую информацию, он обнаруживает форму полосы движения вокруг рассматриваемого транспортного средства на основе информации изображения или т.п., полученной датчиком 11 обнаружения объектов, и устанавливает путь движения, используя обнаруженную форму полосы движения в качестве картографической информации. Информация, полученная датчиком на транспортном средстве, таким как камера, может использоваться для установки пути движения в блоке 22 установки пути движения, и может быть дополнительно использована информация, содержащаяся в картографических данных, такая как дорожные знаки, конструкции, целевые полосы движения поворота. Например, блок 22 установки пути движения идентифицирует местоположение выезда из целевого перекрестка поворота на основе дорожного знака или конструкции, указывающей направление поворота правого поворота в пределах перекрестка, и устанавливает путь движения на перекрестке таким образом, чтобы минимизировать изменение радиуса поворота между местоположением въезда и местоположением выезда перекрестка.
[0030] Когда соседнее транспортное средство обнаружено блоком 21 обнаружения соседнего транспортного средства, блок 23 коррекции пути движения корректирует (устанавливает) путь движения для поворота на перекрестке, установленный блоком 22 установки пути движения, во внутреннюю сторону направления поворота. То есть, когда соседнее транспортное средство не обнаружено блоком 21 обнаружения соседнего транспортного средства, блок 23 коррекции пути движения устанавливает путь движения на перекрестке таким образом, чтобы минимизировать изменение радиуса поворота между местоположением въезда и местоположением выезда перекрестка. Когда соседнее транспортное средство обнаружено блоком 21 обнаружения соседнего транспортного средства, путь движения на перекрестке устанавливается путем коррекции пути движения, установленного в случае, когда блок 21 обнаружения соседнего транспортного средства не обнаруживает соседнее транспортное средство, во внутреннюю сторону направления поворота.
[0031] Следует отметить, что соседнее транспортное средство, обнаруженное блоком 21 обнаружения соседнего транспортного средства, включает в себя не только соседнее поворачивающее транспортное средство, показанное на фиг. 2, но также и соседнее транспортное средство, движущееся прямо вперед. Однако, когда имеется соседнее транспортное средство, в том числе соседнее поворачивающее транспортное средство снаружи от направления поворота, блок 23 коррекции пути движения корректирует путь движения во внутреннюю сторону направления поворота. Поэтому, когда имеется соседнее поворачивающее транспортное средство B, как показано на фиг. 2, возможно уменьшить риск приближения соседнего поворачивающего транспортного средства B к рассматриваемому транспортному средству A. Естественно, траектория движения может быть скорректирована во внутреннюю сторону направления поворота только тогда, когда соседнее транспортное средство, обнаруженное блоком 21 обнаружения соседнего транспортного средства, является соседним поворачивающим транспортным средством.
[0032] После того как путь движения, созданный блоком 20 создания пути движения, создан таким образом, и путь движения скорректирован по мере необходимости, блок 31 управления транспортным средством управляет транспортным средством по установленному пути движения.
[0033] Блок 31 управления транспортным средством создает путь движения и профиль скорости, чтобы следовать по пути движения рассматриваемого транспортного средства при соблюдении правил дорожного движения, не сталкиваясь ни с каким другим транспортным средством, на основе предсказанного пути движения других транспортных средств, и двигаться плавно без резкого замедления или резкого поворота руля, вызванного поведением любого другого транспортного средства. Кроме того, блок 31 управления транспортным средством управляет транспортным средством на основе созданного пути движения и профиля скорости. Следует отметить, что блок 31 управления транспортным средством может обеспечивать отображение помощи при вождении на основе пути рассматриваемого транспортного средства и профиля скорости.
[0034] Фиг. 4 представляет собой блок-схему последовательности операций, иллюстрирующую управление помощью водителю, выполняемое устройством 1 помощи водителю. Следует отметить, что это управление помощью водителю повторяется в заданном цикле. Кроме того, это управление помощью водителю также может выполняться путем выполнения программы, хранящейся в контроллере, предусмотренном в устройстве 1 помощи водителю.
[0035] На этапе S1 контроллер (блок 12 распознавания объектов) получает местоположение, направление движения, размер, скорость или т.п. каждого объекта, существующего вокруг рассматриваемого транспортного средства, используя результат обнаружения объекта вокруг рассматриваемого транспортного средства от датчика 11 обнаружения объектов. Результат обнаружения включает в себя двухмерное местоположение, позицию, размер, скорость или т.п. объекта, например, на зенитной карте, полученной путем наблюдения рассматриваемого транспортного средства с неба.
[0036] На этапе S2 контроллер (блок 12 распознавания объектов) корректирует ошибку датчика 11 обнаружения объектов на основе результата обнаружения объекта на этапе S1 и проверяет (ассоциирует) идентичность объекта в выводе результата обнаружения объекта в разные моменты времени. Таким образом, контроллер (блок 12 распознавания объектов) выводит результат распознавания, такой как местоположение, направление движения, размер, скорость или т.п. объекта, существующего вокруг рассматриваемого транспортного средства, в блок 20 создания пути движения.
[0037] На этапе S3 контроллер (блок 15 оценки местоположения рассматриваемого транспортного средства на карте) получает местоположение рассматриваемого транспортного средства на основе результата обнаружения датчика 13 получения местоположения рассматриваемого транспортного средства.
[0038] На этапе S4 контроллер (блок 15 оценки местоположения рассматриваемого транспортного средства на карте) получает высокоточные картографические данные, хранящиеся в блоке 14 памяти карты.
[0039] На этапе S5 контроллер (блок 15 оценки местоположения рассматриваемого транспортного средства на карте) идентифицирует местоположение рассматриваемого транспортного средства на карте, используя местоположение рассматриваемого транспортного средства, полученное на этапе S3, и картографические данные, полученные на этапе S4.
[0040] На этапе S6 контроллер (блок 20 создания пути движения) создает путь движения рассматриваемого транспортного средства, используя результат обнаружения объекта, существующего поблизости от рассматриваемого транспортного средства, полученный на этапе S2, местоположение рассматриваемого транспортного средства на карте, полученное на этапе S5, и информацию о пункте назначения. Следует отметить, что подробности обработки этапа S6 будут описаны ниже со ссылкой на фиг. 5.
{0041] На этапе S7 контроллер (блок 31 управления транспортным средством) заставляет рассматриваемое транспортное средство двигаться по пути движения рассматриваемого транспортного средства, созданному на этапе S6. Кроме того, контроллер (блок 31 управления транспортным средством) может обеспечить помощь водителю, чтобы двигаться по пути движения рассматриваемого транспортного средства, созданному на этапе S6.
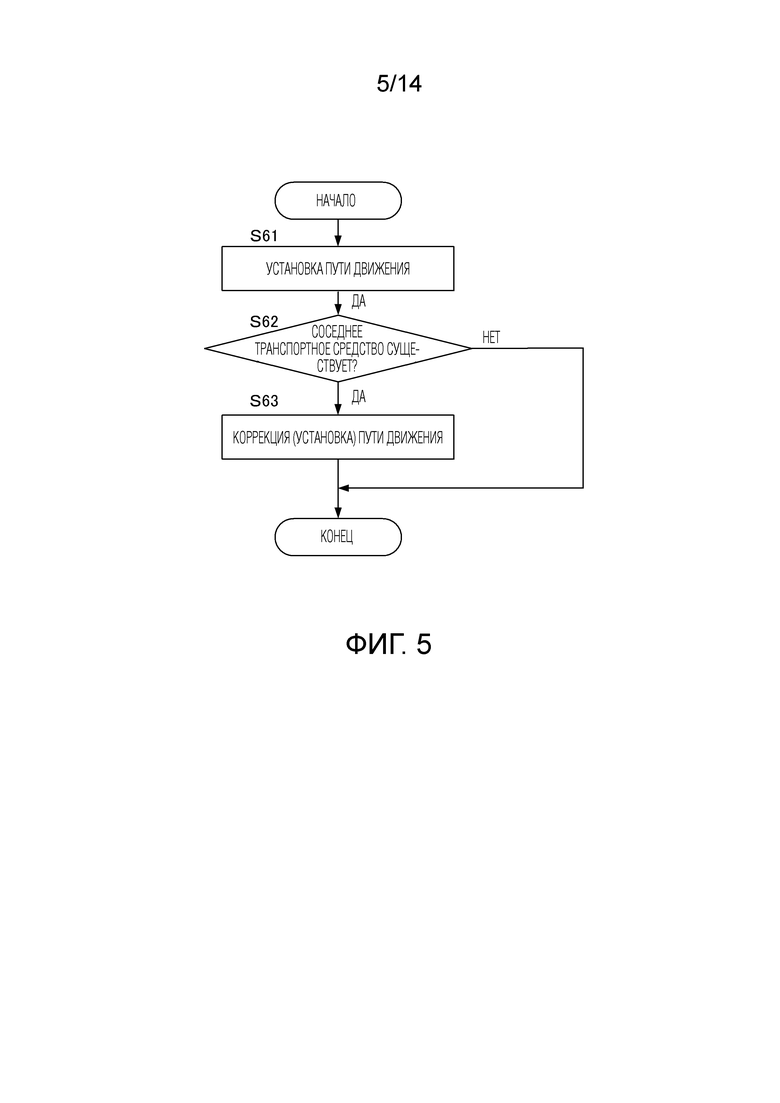
[0042] Фиг. 5 представляет собой блок-схему последовательности операций, иллюстрирующую подробности управления созданием пути движения на этапе S6 на фиг. 4.
[0043] На этапе S61 контроллер (блок 22 установки пути движения) устанавливает путь движения от текущего местоположения рассматриваемого транспортного средства до пункта назначения или транзитного местоположения до пункта назначения, используя картографическую информацию, хранящуюся в блоке 14 памяти карты, информацию о местоположении рассматриваемого транспортного средства на карте, полученную блоком 15 оценки местоположения рассматриваемого транспортного средства на карте, и информацию о пункте назначения.
[0044] На этапе S62 контроллер (блок 21 обнаружения соседнего транспортного средства или блок 23 коррекции пути движения) обнаруживает другое транспортное средство, существующее в пределах заданного диапазона расстояний с внешней стороны (левой стороны) направления поворота, в качестве соседнего транспортного средства, когда путь движения рассматриваемого транспортного средства, установленный на этапе S61, включает в себя поворот (правый поворот) рассматриваемого транспортного средства через другую полосу движения на перекрестке, и текущее местоположение рассматриваемого транспортного средства находится в пределах заданного расстояния от въезда на перекресток (в рядом с перекрестком).
[0045] Кроме того, при обнаружении соседнего транспортного средства (S62: Да), затем контроллер выполняет обработку этапа S63. Когда соседнее транспортное средство не обнаружено (S62: Нет), контроллер завершает управление созданием пути движения.
[0046] На этапе S63 контроллер (блок 23 коррекции пути движения) корректирует (устанавливает) путь движения, установленный блоком 22 установки пути движения на этапе S61, во внутреннюю сторону направления поворота. Корректируя путь движения таким образом, возможно снизить риск приближения соседнего транспортного средства В к рассматриваемому транспортному средству А в ситуации на фиг. 2.
[0047] Кроме того, блок 31 управления транспортным средством управляет движением рассматриваемого транспортного средства по пути движения, созданному блоком 20 создания пути движения. В результате возможно предотвратить отмену автономного вождения водителем, управляющим рулевым колесом, в ответ на приближение соседнего поворачивающего транспортного средства к рассматриваемому транспортному средству. Следовательно, возможно непрерывно выполнять автономное вождение и улучшить стабильность условий вождения.
[0048] Используя устройство 1 помощи водителю согласно первому варианту осуществления, возможно получить следующие эффекты.
[0049] В способе установки пути движения согласно первому варианту осуществления, когда рассматриваемое транспортное средство поворачивает через другую полосу движения на перекрестке (поворот направо в этом варианте осуществления), и соседнее транспортное средство, существующее с внешней стороны направления поворота (левой стороны в этом варианте осуществления) обнаруживается (S62: Да), путь движения на перекрестке устанавливается во внутреннюю сторону направления поворота по сравнению со случаем, когда соседнее транспортное средство не обнаружено (S63). Таким образом, используя информацию о соседнем транспортном средстве, существующем вокруг рассматриваемого транспортного средства, в дополнение к информации о пути движения рассматриваемого транспортного средства, возможно предотвратить приближение соседнего транспортного средства к рассматриваемому транспортному средству, когда существует вероятность того, что соседнее транспортное средство поворачивает и приближается к рассматриваемому транспортному средству.
[0050] В способе установки пути движения согласно первому варианту осуществления, как показано на фиг. 3, блок 23 коррекции пути движения корректирует местоположение X начала поворота на местоположение X’ на передней стороне направления движения на пути поворота на перекрестке и корректирует местоположение Y конца поворота на местоположение Y’ на стороне пункта назначения направления движения. Путь движения устанавливается таким образом, чтобы минимизировать изменение радиуса поворота между местоположениями X’ и Y’, скорректированными таким образом.
[0051] В результате местоположение рассматриваемого транспортного средства в поперечном направлении не меняется в начале и в конце поворота. Кроме того, устанавливая путь поворота так, чтобы минимизировать изменение радиуса поворота, возможно подавить ухудшение качества езды, вызванное изменением местоположения в поперечном направлении или радиусом поворота рассматриваемого транспортного средства.
[0052] <Модификация>
Первый вариант осуществления был описан на примере случая, когда блок 22 установки пути движения устанавливает путь движения рассматриваемого транспортного средства на основе картографической информации и управляет движением рассматриваемого транспортного средства по пути движения. Однако настоящее изобретение не ограничено этим. Блок 22 установки пути движения может устанавливать диапазон пути движения как область движения, имеющую заданную ширину в поперечном направлении, образованную на внешней границе направления поворота и внутренней границе направления поворота, и устанавливать путь движения в пределах диапазона пути движения.
[0053] В этом случае блок 22 установки пути движения устанавливает путь движения таким образом, что управление рулевым колесом становится меньше в установленном диапазоне пути движения. Кроме того, при обнаружении соседнего транспортного средства блок 23 коррекции пути движения изменяет внешнюю границу направления поворота диапазона пути движения во внутреннюю сторону и снова устанавливает путь движения в пределах измененного диапазона пути движения. Таким образом, путь движения корректируется.
[0054] Выполняя коррекцию таким образом, местоположение рассматриваемого транспортного средства в поперечном направлении не меняется в начале и в конце поворота. Поэтому возможно подавить ухудшение качества езды, вызванное изменением местоположения рассматриваемого транспортного средства в поперечном направлении.
[0055] <Второй вариант осуществления>
В первом варианте осуществления был описан пример, в котором блок 20 создания пути движения обнаруживает соседнее транспортное средство, включая соседнее поворачивающее транспортное средство, в основном на основе результата распознавания от блока 12 распознавания объектов. Однако настоящее изобретение не ограничено этим. В этом варианте осуществления будет описан пример обнаружения соседнего поворачивающего транспортного средства на основе полосы движения по направлению движения.
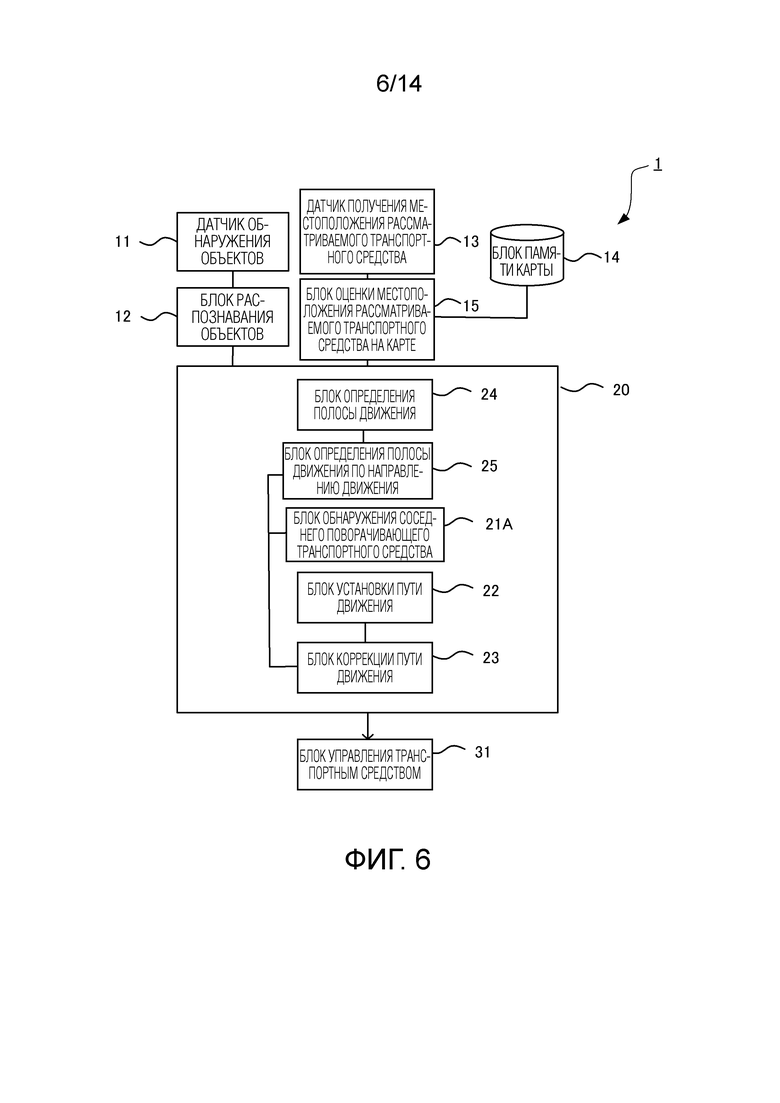
[0056] Фиг. 6 представляет собой блок-схему конфигурации, иллюстрирующую устройство 1 помощи водителю в соответствии со вторым вариантом осуществления. Ссылаясь на этот чертеж, по сравнению с конфигурацией первого варианта осуществления на фиг. 1, блок 20 создания пути движения имеет блок 21A обнаружения соседнего поворачивающего транспортного средства вместо блока 21 обнаружения соседнего транспортного средства и дополнительно имеет блок 24 определения полосы движения и блок 25 определения полосы движения по направлению движения.
[0057] Блок 24 определения полосы движения определяет, имеется ли полоса движения для правого поворота, путем определения типа полосы движения рассматриваемого транспортного средства или смежной полосы движения на основе информации о местоположении рассматриваемого транспортного средства на карте, полученной из блока 15 оценки местоположения рассматриваемого транспортного средства на карте. Блок 24 определения полосы движения может определять существует ли полоса движения для правого поворота по дорожному знаку, дорожной разметке или т.п. на основе информации, полученной датчиком в транспортном средстве, таким как камера, вместо картографической информации.
[0058] Блок 25 определения полосы движения по направлению движения определяет, какая полоса движения используется в качестве полосы движения рассматриваемого транспортного средства. В примере на фиг. 2, блок 25 определения полосы движения по направлению движения определяет, является ли полоса движения рассматриваемого транспортного средства первой полосой движения для поворота, то есть на внутренней стороне (правой стороне) направления поворота среди множества полос движения для правого поворота, которые поворачивают через другую полосу движения.
[0059] В этой конфигурации, во-первых, блок 21А обнаружения соседнего поворачивающего транспортного средства обнаруживает другое транспортное средство, существующее в пределах заданного расстояния с боковой стороны рассматриваемого транспортного средства. Кроме того, блок 21А обнаружения соседнего поворачивающего транспортного средства обнаруживает другое транспортное средство как соседнее поворачивающее транспортное средство, когда блок 24 определения полосы движения определяет, что рассматриваемое транспортное средство движется по полосе движения для правого поворота (первой полосе движения для поворота) с внутренней стороны направления поворота среди множества полос движения для правого поворота, и другое транспортное средство обнаруживается на полосе движения для правого поворота (второй полосе движения для поворота) с внешней стороны направления поворота рассматриваемого транспортного средства. Следует отметить, что блок 21А обнаружения соседнего поворачивающего транспортного средства может обнаруживать поворот другого транспортного средства, используя результат распознавания от блока 12 распознавания объектов. В этой конфигурации возможно скорректировать путь движения только для соседнего поворачивающего транспортного средства, по сравнению со случаем, когда обнаруживаются соседние транспортные средства, включая соседнее транспортное средство, движущееся прямо вперед, и соседнее поворачивающее транспортное средство, и путь движения корректируется только на основе результата распознавания от блока распознавания объектов 12. Следовательно, возможно подавить ненужную коррекцию пути и предотвратить чувство дискомфорта у находящегося в транспортном средстве человека.
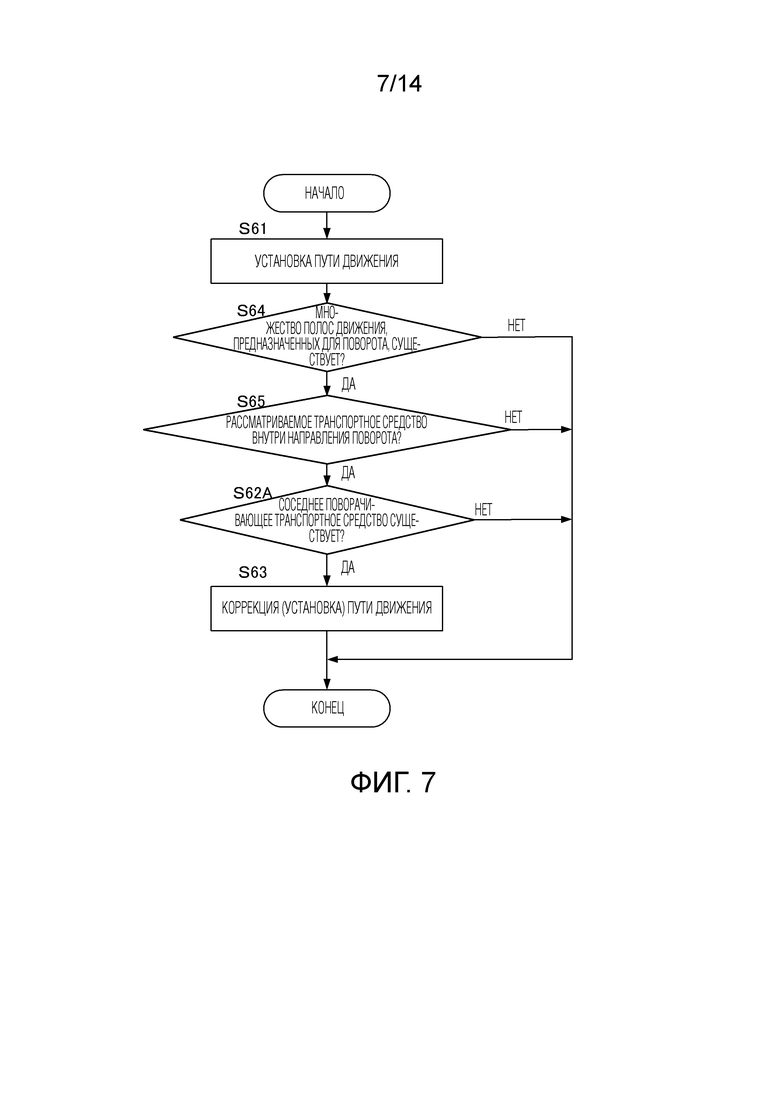
[0060] Фиг. 7 представляет собой блок-схему последовательности операций, иллюстрирующую подробности управления созданием пути движения согласно этому варианту осуществления.
[0061] Ссылаясь на этот чертеж, по сравнению с управлением созданием пути движения первого варианта осуществления на фиг. 5 этап S62A предусмотрен вместо этапа S62, а этапы S64 и S65 добавлены после этапа S61 и перед этапом S62A.
[0062] На этапе S64, используя картографическую информацию, хранящуюся в блоке 14 памяти карты, и информацию о местоположении рассматриваемого транспортного средства на карте, полученную от блока 15 оценки местоположения рассматриваемого транспортного средства на карте, контроллер (блок 24 определения полосы движения) определяет находится ли текущее местоположение рассматриваемого транспортного средства в пределах заданного расстояния от въезда на перекресток (в непосредственной близости от перекрестка), и есть ли множество полос движения для правого поворота (полос движения, предназначенных для поворота), пересекающих другую полосу движения перед перекрестком впереди.
[0063] При наличии множества полос движения для правого поворота (S64: Да), затем контроллер выполняет обработку этапа S65. Когда не существует множества полос движения для правого поворота (S64: Нет), контроллер завершает управление созданием пути движения без корректировки пути движения, установленного на этапе S61.
[0064] На этапе S65, используя картографическую информацию, хранящуюся в блоке 14 памяти карты, и информацию о местоположении рассматриваемого транспортного средства на карте, полученную от блока 15 оценки местоположения рассматриваемого транспортного средства на карте, контроллер (блок 24 определения полосы движения) определяет является ли полоса движения рассматриваемого транспортного средства первой полосой движения для поворота, которая является полосой движения, отличной от самой дальней полосы движения в направлении поворота по отношению к центру поворота множества полос движения для правого поворота (полос движения, предназначенных для поворота).
[0065] Когда рассматриваемое транспортное средство движется по первой полосе движения для поворота (S63: Да), затем контроллер выполняет обработку этапа S64. Когда рассматриваемое транспортное средство не движется по первой полосе движения для поворота, то есть когда рассматриваемое транспортное средство движется по самой дальней полосе движения в направлении поворота (S63: Нет), контроллер завершает управление созданием пути движения без корректировки пути движения, установленного на этапе S61.
[0066] Кроме того, на этапе S62A, когда контроллер (блок 21A обнаружения соседнего поворачивающего транспортного средства) обнаруживает другое транспортное средство, существующее во второй полосе движения для поворота, которая является полосой движения для правого поворота, примыкающей к внешней стороне направления поворота рассматриваемого транспортного средства, другое транспортное средство обнаруживается как соседнее поворачивающее транспортное средство. На этапе S63, когда имеется соседнее поворачивающее транспортное средство, путь движения внутри перекрестка корректируется.
[0067] Используя устройство 1 помощи водителю согласно второму варианту осуществления, возможно получить следующие эффекты.
[0068] В способе установки пути движения согласно второму варианту осуществления путь движения на перекрестке корректируется во внутреннюю сторону (S63), когда обнаруживается наличие двух или более полос движения, предназначенных для поворота, (полос движения для правого поворота в этом варианте осуществления), которые поворачивают через встречную полосу движения (S64: Да), рассматриваемое транспортное средство движется по первой полосе движения для поворота, которая является полосой движения, отличной от самой дальней полосы движения в направлении поворота среди множества полос движения, предназначенных для поворота, (S65: Да), и соседнее поворачивающее транспортное средство обнаружено в пределах заданного расстояния во второй полосе движения для поворота, смежной с внешней стороной направления поворота относительно первой полосы движения для поворота (S62A: Да).
[0069] В этой конфигурации возможно повысить точность обнаружения соседней полосы движения для поворота по сравнению со случаем, когда соседнее поворачивающее транспортное средство обнаруживается с использованием только результата распознавания объекта от блока 12 распознавания объектов без использования информации о полосе движения. В результате становится легко предотвратить приближение соседнего поворачивающего транспортного средства к рассматриваемому транспортному средству.
[0070] <Третий вариант осуществления>
В первом и втором вариантах осуществления блок 20 создания пути движения корректирует путь движения при обнаружении соседнего поворачивающего транспортного средства. В третьем варианте осуществления описание будет сделано для примера, в котором путь движения корректируется, когда имеется соседнее поворачивающее транспортное средство, и существует высокая вероятность того, что путь движения соседнего поворачивающего транспортного средства направлен внутрь направления поворота по сравнению с нормальным состоянием или когда фактически обнаружено, что путь движения соседнего поворачивающего транспортного средства направлен внутрь направления поворота по сравнению с нормальным состоянием.
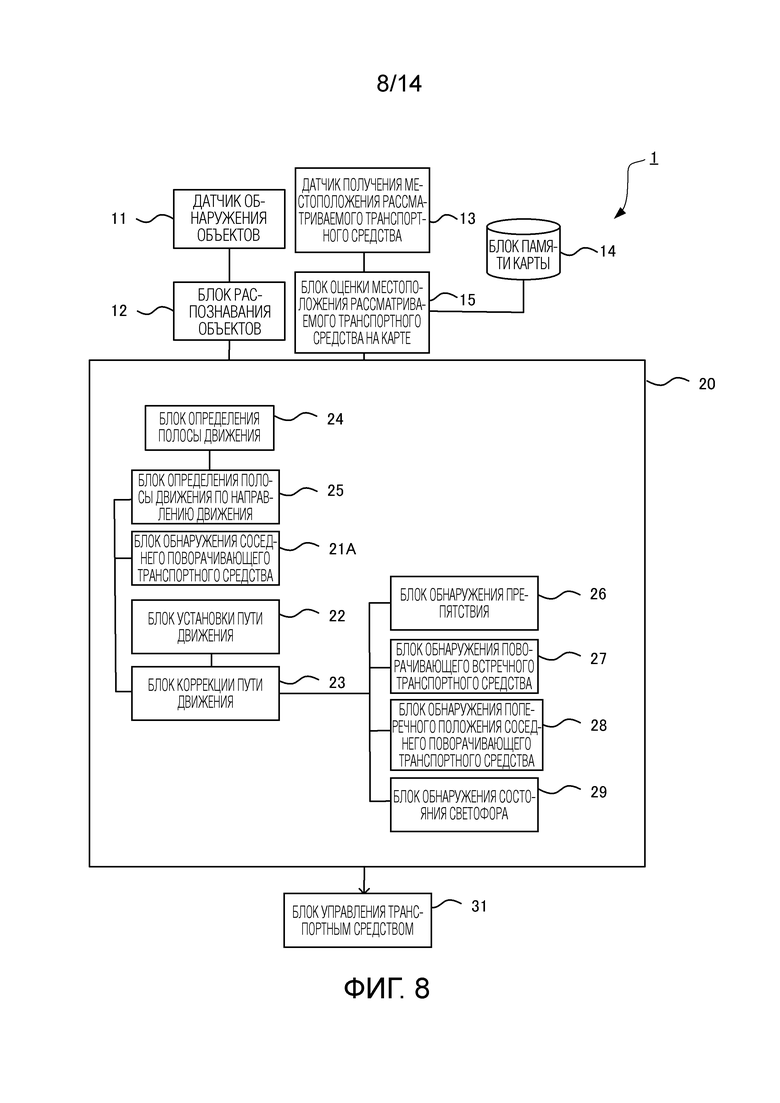
[0071] Фиг. 8 представляет собой блок-схему конфигурации устройства 1 помощи водителю в соответствии с третьим вариантом осуществления. Ссылаясь на этот чертеж, по сравнению с конфигурацией второго варианта осуществления на фиг. 6, блок 20 создания пути движения дополнительно содержит блок 26 обнаружения препятствия, блок 27 обнаружения поворачивающего встречного транспортного средства, блок 28 обнаружения поперечного положения соседнего поворачивающего транспортного средства и блок 29 обнаружения состояния светофора.
[0072] Блок 26 обнаружения препятствия оценивает путь движения после поворота соседнего поворачивающего транспортного средства и определяет, есть ли препятствие на оцененном пути движения после поворота. Блок 23 коррекции пути движения корректирует путь движения, когда блок 26 обнаружения препятствия обнаруживает препятствие на пути движения после поворота соседнего поворачивающего транспортного средства.
[0073] Например, как показано в примере на фиг. 9, припаркованное транспортное средство C может существовать как препятствие на пути движения после поворота соседнего поворачивающего транспортного средства B на перекрестке. В этом случае соседнее поворачивающее транспортное средство B, вероятно, будет двигаться по правой стороне полосы движения после поворота, чтобы объехать припаркованное транспортное средство C. Таким образом, возможно предотвратить приближение соседнего поворачивающего транспортного средства к рассматриваемому транспортному средству посредством коррекции пути движения во внутреннюю сторону направления поворота с использованием блока 23 коррекции пути движения.
[0074] Обращаясь снова к фиг. 8, блок 27 обнаружения поворачивающего встречного транспортного средства определяет, есть ли встречное транспортное средство, движущееся к рассматриваемому транспортному средству по встречной полосе движения, и совершает ли встречное транспортное средство поворот (правый поворот) через полосу движения, проходящую прямо вперед, со стороны рассматриваемого транспортного средства. Кроме того, блок 27 обнаружения поворачивающего встречного транспортного средства обнаруживает встречное транспортное средство, которое совершает поворот через полосу движения, проходящую прямо вперед, со стороны рассматриваемого транспортного средства, как поворачивающее встречное транспортное средство. Когда блок 27 обнаружения поворачивающего встречного транспортного средства обнаруживает поворачивающее встречное транспортное средство, блок 23 коррекции пути движения корректирует путь движения во внутреннюю сторону.
[0075] Как показано в примере на фиг. 10, встречное транспортное средство D находится на встречной полосе движения относительно полосы движения рассматриваемого транспортного средства A, и встречное транспортное средство D совершает правый поворот относительно направления движения (поворот налево на чертеже) через полосу движения, проходящую прямо вперед, со стороны рассматриваемого транспортного средства А (путь, когда рассматриваемое транспортное средство А движется прямо вперед). В этом случае соседнее поворачивающее транспортное средство B, вероятно, изменит путь движения во внутреннюю сторону на перекрестке, чтобы избежать приближения к поворачивающему встречному транспортному средству D. В этом отношении возможно предотвратить приближение соседнего поворачивающего транспортного средства В к рассматриваемому транспортному средству A посредством коррекции пути движения рассматриваемого транспортного средства A во внутреннюю сторону с использованием блока 23 коррекции пути движения.
[0076] Кроме того, путь движения может быть скорректирован, когда имеется соседнее поворачивающее транспортное средство, и обнаружено, что путь движения соседнего поворачивающего транспортного средства фактически направлен внутрь направления поворота от идеального пути движения, то есть когда соседнее поворачивающее транспортное средство фактически приближается к рассматриваемому транспортному средству, движущемуся на внутренней стороне направления поворота во время поворота.
Обращаясь снова к фиг. 8, блок 28 обнаружения поперечного положения соседнего поворачивающего транспортного средства оценивает идеальный путь поворота соседнего поворачивающего транспортного средства и обнаруживает отклонение во внутреннюю сторону в направлении поворота соседнего поворачивающего транспортного средства по отношению к оцененному идеальному пути поворота. Кроме того, блок 23 коррекции пути движения определяет, превышает ли отклонение, обнаруженное блоком 28 обнаружения поперечного положения соседнего поворачивающего транспортного средства, пороговое значение. Когда отклонение превышает пороговое значение, путь движения корректируется во внутреннюю сторону.
[0077] Как показано в примере на фиг. 11, предпочтительно, чтобы идеальный путь поворота соседнего поворачивающего транспортного средства В был установлен таким образом, чтобы изменение радиуса поворота на перекрестке было минимальным, как показано пунктирной линией. Однако соседнее поворачивающее транспортное средство В может двигаться по внутренней стороне направления поворота от оптимального пути движения, как показано сплошной линией в некоторых случаях.
[0078] В этом случае блок 28 обнаружения поперечного положения соседнего поворачивающего транспортного средства обнаруживает отклонение во внутреннюю сторону в направлении поворота соседнего поворачивающего транспортного средства B относительно идеального пути поворота. Кроме того, когда отклонение превышает пороговое значение, блок 23 коррекции пути движения корректирует путь движения рассматриваемого транспортного средства А на внутреннюю сторону направления поворота. В результате возможно предотвратить приближение соседнего поворачивающего транспортного средства B к рассматриваемому транспортному средству A.
[0079] Обращаясь снова к фиг. 8, блок 29 обнаружения состояния светофора получает информацию о светофоре, расположенном на перекрестке. Например, как показано на фиг. 12, блок 29 обнаружения состояния светофора обнаруживает сигналы светофора α, расположенного впереди рассматриваемого транспортного средства в направлении движения, чтобы указать, разрешено ли движение рассматриваемому транспортному средству A и соседнему поворачивающему транспортному средству B, и пешеходного светофора β, указывающего, разрешено ли пешеходу переходить путь движения после поворота рассматриваемого транспортного средства A. Следует отметить, что блок 29 обнаружения состояния светофора может получать информацию о светофоре от дорожной инфраструктуры посредством связи. Следует отметить, что, когда объекты, расположенные вокруг рассматриваемого транспортного средства, обнаруженные датчиком 11 обнаружения объектов, включают в себя светофор, результат обнаружения объекта, включая состояния свечения (состояние отображения) каждого светофора, может быть выведен в блок 29 обнаружения состояния светофора, и блок 29 обнаружения состояния светофора может обнаруживать состояние светофора на основе этого результата.
[0080] Когда светофор α и пешеходный светофор β удовлетворяют следующему условию, блок 23 коррекции пути движения корректирует путь движения рассматриваемого транспортного средства A во внутреннюю сторону направления поворота посредством определения, что соседнее поворачивающее транспортное средство B с большой вероятностью будет двигаться внутрь направления поворота на перекрестке.
[0081] Например, блок 23 коррекции пути движения корректирует путь движения рассматриваемого транспортного средства А, когда блок 29 обнаружения состояния светофора предсказывает, что время до включения сигнала СТОП (красного) короче заданного порогового значения, на основе шаблона отображения светофора α, полученного посредством связи. Непосредственно перед тем, как светофор переключится на сигнал СТОП, соседнее поворачивающее транспортное средство B, вероятно, проедет дальше внутрь в направлении поворота на перекрестке, чтобы сократить расстояние движения и время поворота на перекрестке. В этом отношении возможно предотвратить приближение соседнего поворачивающего транспортного средства В к рассматриваемому транспортному средству А посредством коррекции пути движения рассматриваемого транспортного средства А во внутреннюю сторону направления поворота.
[0082] Кроме того, блок 29 обнаружения состояния светофора может определить, что время до изменения на сигнал СТОП (красный) короткое, когда время свечения сигнала ДВИЖЕНИЕ РАЗРЕШЕНО (зеленый) светофора α (то есть истекшее время после того, как сигнал светофора α меняется на ДВИЖЕНИЕ РАЗРЕШЕНО) дольше заданного порогового значения. Поэтому блок 23 коррекции пути движения корректирует путь движения рассматриваемого транспортного средства А. В результате, даже когда трудно получить шаблон отображения светофора посредством связи, и соседнее поворачивающее транспортное средство В, вероятно, проедет дальше внутрь на перекрестке, возможно предотвратить приближение соседнего поворачивающего транспортного средства B к рассматриваемому транспортному средству A посредством коррекции пути движения рассматриваемого транспортного средства A во внутреннюю сторону направления поворота.
[0083] Кроме того, когда блок 29 обнаружения состояния светофора обнаруживает изменение сигнала пешеходного светофора β с ДВИЖЕНИЕ РАЗРЕШЕНО (зеленого) на СТОП (красный), ожидается, что сигнал светофора α вскоре изменится на СТОП. Поэтому блок 23 коррекции пути движения корректирует путь движения рассматриваемого транспортного средства А. Когда водитель соседнего поворачивающего транспортного средства В обнаруживает, что сигнал пешеходного светофора β изменился с ДВИЖЕНИЕ РАЗРЕШЕНО (зеленого) на СТОП (красный), можно предсказать, что время до изменения сигнала светофора α на СТОП (красный) короткое. Следовательно, соседнее поворачивающее транспортное средство B, вероятно, будет двигаться дальше внутрь перекрестка. В этом отношении возможно предотвратить приближение соседнего поворачивающего транспортного средства В к рассматриваемому транспортному средству А посредством коррекции пути движения рассматриваемого транспортного средства А во внутреннюю сторону направления поворота.
[0084] Фиг. 13 представляет собой блок-схему последовательности операций, иллюстрирующую подробности управления созданием пути движения согласно этому варианту осуществления.
[0085] Ссылаясь на этот чертеж, обработка этапа S66 добавлена после этапа S62A и перед этапом S63 по сравнению с управлением созданием пути движения во втором варианте осуществления по фиг. 7.
[0086] На этапе S66 блок 23 коррекции пути движения определяет, необходимо ли корректировать путь движения. В частности, блок 23 коррекции пути движения определяет, необходимо ли корректировать путь движения, на основе результатов обнаружения по меньшей мере одного из блока 26 обнаружения препятствия, блока 27 обнаружения поворачивающего встречного транспортного средства, блока 28 обнаружения поперечного положения соседнего поворачивающего транспортного средства и блока 29 обнаружения состояния светофора.
[0087] То есть блок 23 коррекции пути движения корректирует путь движения, когда путь движения соседнего поворачивающего транспортного средства с высокой вероятностью будет направлен внутрь в направлении поворота, как в случае, когда блок 26 обнаружения препятствия обнаруживает препятствие на пути движения после поворота соседнего поворачивающего транспортного средства, и случае, когда блок 27 обнаружения поворачивающего встречного транспортного средства обнаруживает поворачивающее встречное транспортное средство, выполняющее поворот через полосу движения, проходящую прямо вперед, со стороны рассматриваемого транспортного средства. В качестве альтернативы блок 23 коррекции пути движения корректирует путь движения, когда отклонение фактического пути движения в направлении поворота соседнего поворачивающего транспортного средства по отношению к идеальному пути поворота соседнего поворачивающего транспортного средства, обнаруженное блоком 28 обнаружения поперечного положения соседнего поворачивающего транспортного средства, превышает пороговое значение.
[0088] Кроме того, блок 23 коррекции пути движения может корректировать путь движения, когда ожидается, что путь движения соседнего поворачивающего транспортного средства с большой вероятностью будет направлен внутрь направления поворота, на основе результата обнаружения от блока 29 обнаружения состояния светофора для по меньшей мере одного из состояний светофора α, указывающего направления движения рассматриваемого транспортного средства A и соседнего поворачивающего транспортного средства B, и пешеходного светофора β, указывающего, разрешено ли пешеходу переходить путь движения после поворота рассматриваемого транспортного средства А.
[0089] В частности, блок 23 коррекции пути движения корректирует путь движения, когда предсказано, что время до того, как сигнал светофора α сменится на СТОП (красный), меньше порогового значения, или когда время свечения сигнала ДВИЖЕНИЕ РАЗРЕШЕНО (зеленого) светофора α больше порогового значения. Блок 23 коррекции пути движения корректирует путь движения, когда обнаружено, что сигнал пешеходного светофора β изменился с ДВИЖЕНИЕ РАЗРЕШЕНО (зеленого) на СТОП (красный).
[0090] В результате возможно более точно определить, необходимо ли корректировать путь движения, и, таким образом, исключить ненужную коррекцию пути движения.
[0091] Кроме того, когда ширина поворачивающего встречного транспортного средства превышает пороговое значение, весьма вероятно, что соседнее поворачивающее транспортное средство B движется внутрь направления поворота на перекрестке. По этой причине, когда блок 27 обнаружения поворачивающего встречного транспортного средства может определить ширину поворачивающего встречного транспортного средства, блок 23 коррекции пути движения корректирует путь движения посредством обнаружения, что ширина поворачивающего встречного транспортного средства превышает пороговое значение. В результате возможно снизить риск приближения соседнего поворачивающего транспортного средства к рассматриваемому транспортному средству. Следует отметить, что блок 27 обнаружения поворачивающего встречного транспортного средства может обнаруживать общую длину или высоту поворачивающего встречного транспортного средства для определения типа транспортного средства (например, автобуса или грузового автомобиля).
[0092] В качестве другого примера, блок 23 коррекции пути движения может корректировать путь движения, когда блок 27 обнаружения поворачивающего встречного транспортного средства обнаруживает, что соседнее поворачивающее транспортное средство В движется параллельно с боковой стороны наружу направления поворота рассматриваемого транспортного средства А. В результате возможно дополнительно снизить риск приближения соседнего поворачивающего транспортного средства к рассматриваемому транспортному средству.
[0093] Используя устройство 1 помощи водителю согласно третьему варианту осуществления, возможно получить следующие эффекты.
[0094] В способе установки пути движения согласно третьему варианту осуществления путь движения корректируется во внутреннюю сторону направления поворота (S63), когда соседнее поворачивающее транспортное средство находится на внешней стороне пути движения рассматриваемого транспортного средства в направление поворота, и препятствие, такое как припаркованное транспортное средство или участок строительства, обнаружено на пути движения после поворота соседнего поворачивающего транспортного средства блоком 26 обнаружения препятствия (S66: Да).
[0095] Как показано на фиг. 9, когда припаркованное транспортное средство C существует в качестве препятствия на пути движения после поворота соседнего поворачивающего транспортного средства B на перекрестке, соседнее поворачивающее транспортное средство B с большой вероятностью будет двигаться в направлении полосы движения рядом с центром, который находится внутри направления поворота после поворота, чтобы объехать припаркованное транспортное средство C. В связи с этим возможно предотвратить приближение соседнего поворачивающего транспортного средства B к рассматриваемому транспортному средству A посредством коррекции пути движения рассматриваемого транспортного средства A во внутреннюю сторону направления поворота.
[0096] В способе установки пути движения согласно третьему варианту осуществления путь движения корректируется во внутреннюю сторону направления поворота (S63), когда соседнее поворачивающее транспортное средство находится на внешней стороне пути движения рассматриваемого транспортного средства в направление поворота, и блок 27 обнаружения поворачивающего встречного транспортного средства обнаруживает поворачивающее встречное транспортное средство, которое существует на встречной полосе движения, и совершает поворот через полосу движения, проходящую прямо вперед, рассматриваемого транспортного средства (S66: Да).
[0097] Как показано на фиг. 10, когда есть поворачивающее встречное транспортное средство D, очень вероятно, что соседнее поворачивающее транспортное средство B проедет дальше внутрь на перекрестке, чтобы избежать приближения к поворачивающему встречному транспортному средству D. В этом отношении возможно предотвратить приближение соседнего поворачивающего транспортного средства B, которое может двигаться по внутренней стороне, к рассматриваемому транспортному средству A посредством коррекции пути движения во внутреннюю сторону с помощью блока 23 коррекции пути движения.
[0098] В способе установки пути движения согласно третьему варианту осуществления путь движения корректируется во внутреннюю сторону направления поворота (S63), когда присутствует соседнее поворачивающее транспортное средство, существующее снаружи пути движения рассматриваемого транспортного средства в направлении поворота, блок 27 обнаружения поворачивающего встречного транспортного средства определяет ширину поворачивающего встречного транспортного средства, и обнаруженная ширина превышает пороговое значение (S66: Да). Когда ширина поворачивающего встречного транспортного средства велика, соседнее поворачивающее транспортное средство B, скорее всего, будет двигаться дальше внутрь на перекрестке, чтобы избежать приближения поворачивающего встречного транспортного средства. В связи с этим возможно предотвратить приближение соседнего поворачивающего транспортного средства B к рассматриваемому транспортному средству A посредством коррекции пути движения во внутреннюю сторону с использованием блока 23 коррекции пути движения.
[0099] В способе установки пути движения согласно третьему варианту осуществления, когда присутствует соседнее поворачивающее транспортное средство, существующее снаружи пути движения рассматриваемого транспортного средства в направлении поворота, отклонение фактического пути поворота соседнего транспортного средства к внутренней стороне направления поворота относительно идеального пути поворота соседнего поворачивающего транспортного средства дополнительно обнаруживается блоком 28 обнаружения поперечного положения соседнего поворачивающего транспортного средства. Затем блок 23 коррекции пути движения корректирует путь движения во внутреннюю сторону направления поворота (S63), когда отклонение превышает пороговое значение (S66: Да).
[0100] Как показано на фиг. 11, предпочтительно, чтобы соседнее поворачивающее транспортное средство В двигалось по идеальному пути поворота (пунктирная линия), так чтобы изменение радиуса поворота на перекрестке было бы минимальным. Однако в некоторых случаях соседнее поворачивающее транспортное средство B может двигаться по пути движения внутрь направления поворота (сплошная линия) по отношению к идеальному пути поворота. В связи с этим, когда отклонение фактического пути поворота соседнего поворачивающего транспортного средства В к внутренней стороне направления поворота по отношению к идеальному пути поворота превышает пороговое значение, блок 23 коррекции пути движения корректирует путь движения во внутреннюю сторону направления поворота по сравнению со случаем, когда отклонение не превышает порогового значения. В результате возможно предотвратить приближение соседнего поворачивающего транспортного средства B к рассматриваемому транспортному средству A.
[0101] В способе установки пути движения согласно третьему варианту осуществления, как показано на фиг. 12, блок 29 обнаружения состояния светофора получает состояние отображения светофора α, указывающее, разрешено ли движение рассматриваемому транспортному средству. Кроме того, блок 23 коррекции пути движения оценивает, отображает ли светофор α сигнал СТОП в течение заданного времени. Когда имеется соседнее поворачивающее транспортное средство, существующее снаружи пути движения рассматриваемого транспортного средства в направлении поворота, и оценено, что сигнал СТОП отображается в течение заданного времени (S66: Да), блок 23 коррекции пути движения корректирует путь движения во внутреннюю сторону направления поворота (S63).
[0102] Непосредственно перед тем, как сигнал светофора α изменится на СТОП, соседнее поворачивающее транспортное средство B с большой вероятностью проедет дальше внутрь на перекрестке, чтобы сократить расстояние движения и время поворота на перекрестке. В этом отношении возможно предотвратить приближение соседнего поворачивающего транспортного средства В к рассматриваемому транспортному средству А посредством коррекции пути движения рассматриваемого транспортного средства А во внутреннюю сторону направления поворота.
[0103] В способе установки пути движения согласно третьему варианту осуществления блок 23 коррекции пути движения корректирует путь движения во внутреннюю сторону направления поворота (S63), когда присутствует соседнее поворачивающее транспортное средство, существующее снаружи пути движения рассматриваемого транспортного средства в направлении поворота, и время, в течение которого светофор α отображает сигнал ДВИЖЕНИЕ РАЗРЕШЕНО, равно или превышает заданное время (S66: Да).
[0104] Когда светофор α в течение длительного времени отображает сигнал ДВИЖЕНИЕ РАЗРЕШЕНО, это может быть ситуация непосредственно перед тем, как сигнал светофора α изменится на СТОП. Следовательно, соседнее поворачивающее транспортное средство B с большой вероятностью проедет дальше внутрь на перекрестке, чтобы сократить расстояние движения и время поворота на перекрестке. В этом отношении возможно предотвратить приближение соседнего поворачивающего транспортного средства В к рассматриваемому транспортному средству А посредством коррекции пути движения рассматриваемого транспортного средства А во внутреннюю сторону направления поворота.
[0105] В способе установки пути движения согласно третьему варианту осуществления блок 29 обнаружения состояния светофора обнаруживает состояние пешеходного светофора β для пешехода Е, который пересекает целевой путь поворота рассматриваемого транспортного средства А. Кроме того, блок 23 коррекции пути движения корректирует путь движения во внутреннюю сторону направления поворота (S63), когда соседнее поворачивающее транспортное средство находится снаружи пути движения рассматриваемого транспортного средства в направлении поворота, и обнаружено, что пешеходный светофор β переключился с сигнала ДВИЖЕНИЕ РАЗРЕШЕНО на сигнал СТОП (S66: Да).
[0106] Когда обнаружено переключение пешеходного светофора β с сигнала ДВИЖЕНИЕ РАЗРЕШЕНО на сигнал СТОП, ожидается, что светофор α, указывающий, разрешено ли двигаться соседнему поворачивающему транспортному средству B, не переключился на сигнал СТОП. По этой причине соседнее поворачивающее транспортное средство B может двигаться дальше внутрь пути движения, чтобы сократить расстояние движения и время поворота на перекрестке. В этом отношении возможно предотвратить приближение соседнего поворачивающего транспортного средства В к рассматриваемому транспортному средству А посредством коррекции пути движения рассматриваемого транспортного средства А во внутреннюю сторону направления поворота.
[0107] <Модификация>
В третьем варианте осуществления было выполнено описание для примера, в котором блок 23 коррекции пути движения определяет, необходима ли коррекция пути движения, на основе результата обнаружения от по меньшей мере одного из блока 26 обнаружения препятствия, блока 27 обнаружения поворачивающего встречного транспортного средства, блока 28 обнаружения поперечного положения соседнего поворачивающего транспортного средства и блока 29 обнаружения состояния светофора для определения, необходима ли коррекция на этапе S66. Однако настоящее изобретение не ограничено этим.
[0108] Чтобы определить, необходима ли коррекция на этапе S66, блок 23 коррекции пути движения может получить возможность того, что соседнее поворачивающее транспортное средство движется по внутренней стороне направления поворота, на основе результатов обнаружения блока 26 обнаружения препятствия, блока 27 обнаружения поворачивающего встречного транспортного средства, блока 28 обнаружения поперечного положения соседнего поворачивающего транспортного средства и блока 29 обнаружения состояния светофора, и определить, что коррекция необходима, когда вероятность превышает пороговое значение. В этой конфигурации возможно определить, необходима ли коррекция пути движения с учетом фактического состояния движения.
[0109] <Четвертый вариант осуществления>
В третьем варианте осуществления было выполнено описание для примера, в котором необходима ли коррекция на этапе S66, в дополнение к тому, имеется или нет соседнее поворачивающее транспортное средство. Однако настоящее изобретение не ограничено этим. Например, величина коррекции может быть изменена вместо определения, необходима ли коррекции.
[0110] Фиг. 14 представляет собой блок-схему последовательности операций, иллюстрирующую подробности управления созданием пути движения согласно четвертому варианту осуществления. По сравнению с управлением созданием пути движения третьего варианта осуществления, показанного на фиг. 13 добавлена обработка этапа S67 вместо этапа S66.
[0111] На этапе S67 блок 23 коррекции пути движения получает вероятности того, что соседнее поворачивающее транспортное средство приближается к рассматриваемому транспортному средству для каждого из результатов обнаружения блока 26 обнаружения препятствия, блока 27 обнаружения поворачивающего встречного транспортного средства, блока 28 обнаружения поперечного положения соседнего поворачивающего транспортного средства и блок 29 обнаружения состояния светофора. Кроме того, блок 23 коррекции пути движения определяет величину коррекции пути движения на основе суммы этих вероятностей.
[0112] В результате возможно шаг за шагом корректировать путь движения во внутреннюю сторону направления поворота и избегать приближения соседнего поворачивающего транспортного средства на основе вероятностей. Следовательно, возможно предотвратить резкое рулевое управление рассматриваемым транспортным средством, которое ухудшает качество езды.
[0113] Следует отметить, что каждый из вышеупомянутых вариантов осуществления может комбинироваться друг с другом любым способом в пределах диапазона, не вызывающего проблем.
[0114] Программа управления, заставляющая контроллер, который является компьютером, выполнять обработку, описанную в каждом варианте осуществления, и носитель данных, на котором хранится программа управления, также входят в объем объектов изобретения, описанных в описании, и т.п. во время подачи.
Изобретение относится к способу установки пути движения и устройству установки пути движения. Заявлен способ установки пути движения для транспортного средства (ТС), в котором установленный путь движения рассматриваемого ТС включает в себя путь движения, который поворачивает через другую полосу движения на перекрестке. Упомянутый способ выполнен с возможностью установки пути движения для поворота ТС во внутреннюю сторону направления поворота, обнаружения, есть ли две или более полос движения для поворота перед перекрестком, установки пути движения во внутреннюю сторону направления поворота. Установка пути движения во внутреннюю сторону направления поворота осуществляется, когда рассматриваемое ТС движется по первой полосе движения для поворота, которая является полосой движения, отличной от самой дальней полосы движения в направлении поворота, среди полос движения для поворота, и когда соседнее ТС присутствует на второй полосе движения для поворота вне первой полосы движения для поворота в направлении поворота, по сравнению со случаем, когда соседнее ТС не обнаружено. Повышается безопасность при эксплуатации ТС. 2 н. и 9 з.п. ф-лы, 14 ил.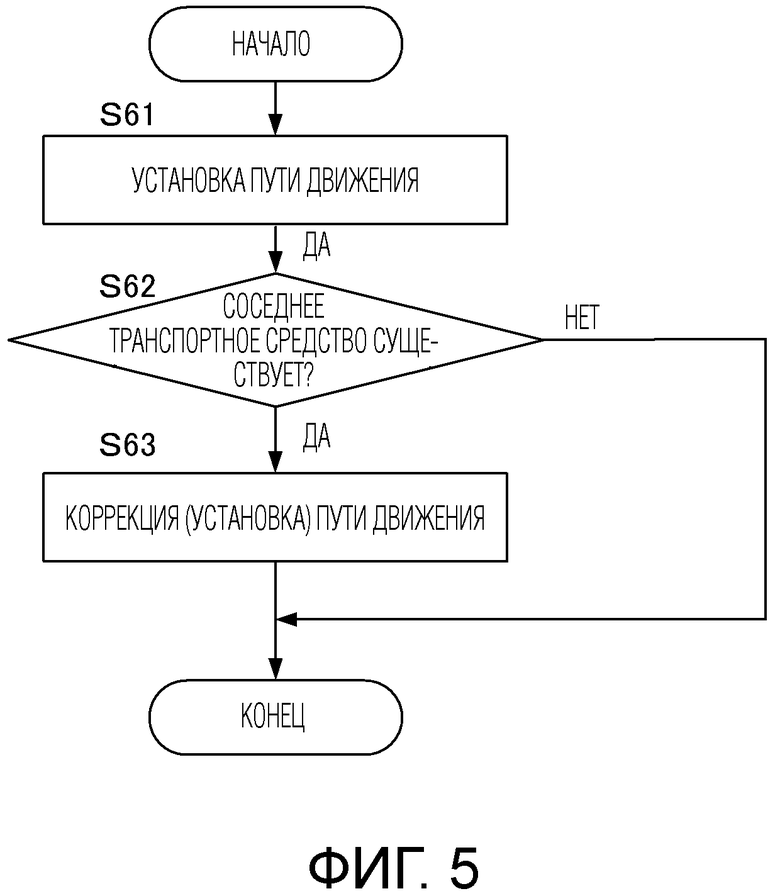
1. Способ установки пути движения для транспортного средства, в котором
установленный путь движения рассматриваемого транспортного средства включает в себя путь движения, который поворачивает через другую полосу движения на перекрестке; и
упомянутый способ установки пути движения выполнен с возможностью:
установки пути движения для поворота транспортного средства во внутреннюю сторону направления поворота, когда соседнее транспортное средство присутствует в пределах заданного расстояния вне пути движения рассматриваемого транспортного средства в направлении поворота, по сравнению со случаем, когда нет соседнего транспортного средства;
обнаружения, есть ли две или более полос движения для поворота, которые поворачивают через другую полосу движения, перед перекрестком; и
установки пути движения во внутреннюю сторону направления поворота, когда рассматриваемое транспортное средство движется по первой полосе движения для поворота, которая является полосой движения, отличной от самой дальней полосы движения в направлении поворота, среди полос движения для поворота, и когда соседнее транспортное средство присутствует на второй полосе движения для поворота вне первой полосы движения для поворота в направлении поворота, по сравнению со случаем, когда соседнее транспортное средство не обнаружено.
2. Способ установки пути движения по п. 1, при этом упомянутый способ дополнительно выполнен с возможностью:
оценки пути движения соседнего транспортного средства; и
установки пути движения во внутреннюю сторону направления поворота, когда соседнее транспортное средство присутствует и обнаружено препятствие на оцененном пути движения после поворота соседнего транспортного средства.
3. Способ установки пути движения по п. 1 или 2, при этом упомянутый способ дополнительно выполнен с возможностью:
обнаружения поворачивающего встречного транспортного средства, которое представляет собой встречное транспортное средство, движущееся по встречной полосе движения в качестве другой полосы движения, и поворачивает через путь прямо вперед рассматриваемого транспортного средства; и
установки пути движения во внутреннюю сторону направления поворота, когда соседнее транспортное средство присутствует и обнаружено поворачивающее встречное транспортное средство.
4. Способ установки пути движения по п. 3, при этом упомянутый способ дополнительно выполнен с возможностью:
обнаружения ширины поворачивающего встречного транспортного средства; и
установки пути движения во внутреннюю сторону направления поворота, когда присутствует соседнее транспортное средство, обнаружено поворачивающее встречное транспортное средство и упомянутая ширина превышает пороговое значение, по сравнению со случаем, когда упомянутая ширина не превышает пороговое значение.
5. Способ установки пути движения по любому из пп. 1-4, при этом упомянутый способ дополнительно выполнен с возможностью:
получения идеального пути поворота соседнего транспортного средства на перекрестке;
получения отклонения фактического пути движения соседнего транспортного средства к внутренней стороне направления поворота относительно идеального пути поворота; и
установки пути движения во внутреннюю сторону направления поворота, когда присутствует соседнее транспортное средство и отклонение превышает пороговое значение.
6. Способ установки пути движения по любому из пп. 1-5, при этом упомянутый способ дополнительно выполнен с возможностью:
обнаружения сигнала светофора, указывающего, разрешено ли движение рассматриваемому транспортному средству; и
установки пути движения во внутреннюю сторону направления поворота, когда присутствует соседнее транспортное средство и оценено, что сигнал светофора изменится с ДВИЖЕНИЕ РАЗРЕШЕНО на СТОП через заданное время.
7. Способ установки пути движения по любому из пп. 1-5, при этом упомянутый способ дополнительно выполнен с возможностью:
обнаружения сигнала светофора, указывающего, разрешено ли движение рассматриваемому транспортному средству; и
установки пути движения во внутреннюю сторону направления поворота, когда присутствует соседнее транспортное средство и обнаружено, что сигнал ДВИЖЕНИЕ РАЗРЕШЕНО светофора остается в течение заданного времени или дольше.
8. Способ установки пути движения по любому из пп. 1-5, при этом упомянутый способ дополнительно выполнен с возможностью:
обнаружения сигнала пешеходного светофора, указывающего, разрешено ли пешеходу пересекать путь движения после поворота рассматриваемого транспортного средства; и
установки пути движения во внутреннюю сторону направления поворота, когда присутствует соседнее транспортное средство и обнаружено изменение сигнала пешеходного светофора с ДВИЖЕНИЕ РАЗРЕШЕНО на СТОП.
9. Способ установки пути движения по любому из пп. 1-8, в котором
установка пути движения во внутреннюю сторону направления поворота выполняется таким образом, что местоположение начала поворота рассматриваемого транспортного средства перемещается к передней стороне направления движения, а местоположение конца поворота рассматриваемого транспортного средства перемещается к стороне пункта назначения направления движения.
10. Способ установки пути движения по любому из пп. 1-8, в котором
установка пути движения выполняется таким образом, что устанавливается допустимый диапазон движения, имеющий длину в поперечном направлении, и путь движения устанавливается в пределах допустимого диапазона движения, и
установка пути движения во внутреннюю сторону направления поворота выполняется таким образом, что внешняя граница допустимого диапазона движения в направлении поворота изменяется к внутренней стороне направления поворота, и путь движения устанавливается в пределах измененного допустимого диапазона движения.
11. Устройство установки пути движения для транспортного средства, содержащее:
датчик, выполненный с возможностью обнаружения окружающей среды рассматриваемого транспортного средства; и
контроллер, выполненный с возможностью установки пути движения рассматриваемого транспортного средства на основе информации об окружающей среде, обнаруженной датчиком, при этом
контроллер выполнен с возможностью:
установки пути движения, включающего в себя путь для поворота через другую полосу движения на перекрестке;
установки пути движения во внутреннюю сторону направления поворота, когда соседнее транспортное средство присутствует в пределах заданного расстояния вне пути движения в направлении поворота, по сравнению со случаем, когда нет соседнего транспортного средства;
обнаружения, есть ли две или более полос движения для поворота, которые поворачивают через другую полосу движения, перед перекрестком; и
установки пути движения во внутреннюю сторону направления поворота, когда рассматриваемое транспортное средство движется по первой полосе движения для поворота, которая является полосой движения, отличной от самой дальней полосы движения в направлении поворота, среди полос движения для поворота, и когда соседнее транспортное средство присутствует на второй полосе движения для поворота вне первой полосы движения для поворота в направлении поворота, по сравнению со случаем, когда соседнее транспортное средство не обнаружено.
| УСТРОЙСТВО ФОРМИРОВАНИЯ ЦЕЛЕВОГО МАРШРУТА И УСТРОЙСТВО УПРАВЛЕНИЯ ПРИВЕДЕНИЕМ В ДВИЖЕНИЕ | 2015 |
|
RU2697359C2 |
| Станок для придания концам круглых радиаторных трубок шестигранного сечения | 1924 |
|
SU2019A1 |
| Станок для придания концам круглых радиаторных трубок шестигранного сечения | 1924 |
|
SU2019A1 |
| Способ получения цианистых соединений | 1924 |
|
SU2018A1 |
| СИСТЕМА ПРЕДОТВРАЩЕНИЯ СТОЛКНОВЕНИЙ ТРАНСПОРТНЫХ СРЕДСТВ В КОЛОННЕ | 2004 |
|
RU2292564C2 |
