Предлагаемое изобретение относится к электротехнике и может быть использовано для диагностики состояния и разработки способов управления приводными электромагнитами (ЭМ) клапанов и коммутационных аппаратов.
Известны способы диагностики состояния якоря ЭМ по сигналу с выхода акселерометра, механически связанного с конструктивными элементами ЭМ.
Например, в [1] акселерометр используется экспериментально в целях точной идентификации момента, в который подвижный элемент электромагнитного клапана достигает своего конечного положения. В аналогичных технических решениях, предлагаемых в [2] и [3], сигнал с выхода акселерометра используется как сигнал обратной связи, формируемый при достижении электромагнитным клапаном состояния «открыто», когда возникает ускорение/вибрация при достижении якорем жесткого стопа, что заставляет, как следует из описания, акселерометр «звенеть». Таким образом, можно сделать вывод, что акселерометр в этих технических решениях жестко связан с корпусом ЭМ и позволяет измерять только его вибрационное ускорение.
Наиболее близким к заявляемому способу является способ диагностики состояния якоря ЭМ, заключающийся в определении моментов срабатывания и отпускания ЭМ с использованием выходного сигнала акселерометра, описанный в [4]. Это техническое решение позволяет по знаку ускорения в первый момент соударения якоря с корпусом определить какое именно событие произошло: срабатывание или отпускание ЭМ. При этом акселерометр, как и в упомянутых выше технических решениях, жестко связан с корпусом ЭМ и измеряет его вибрационное ускорение.
Задачей предполагаемого изобретения является расширение функциональных возможностей способа диагностики состояния якоря ЭМ, заключающееся в определении текущих значений положения якоря ЭМ и скорости его движения в процессе срабатывания и отпускания, что создает дополнительные возможности для исследования функционирования ЭМ в составе исполнительных устройств при проведении различных лабораторных и заводских испытаний.
Для решения поставленной задачи преобразуют текущее значение ускорения якоря в пропорциональный ему электрический сигнал, интегрируют его на временном интервале движения якоря от начала его перемещения до момента соприкосновения со стопом при срабатывании или до момента соприкосновения якоря с упором при отпускании, формируя таким образом сигнал, пропорциональный текущему значению скорости движения якоря, интегрируют на том же временном интервале этот сигнал, формируя в каждый момент времени сигнал, пропорциональный текущему положению якоря во время его перемещения, фиксируют момент достижения якорем механического ограничителя (стопа при срабатывании и упора при отпускании), характеризующийся изменением знака ускорения, и формируют в этот момент времени сигнал, являющийся признаком достижения якорем конечного положения при срабатывании или отпускании ЭМ.
Ввиду технической сложности определения момента начала движения якоря при срабатывании ЭМ из-за медленно нарастающего фронта сигнала измеряемого ускорения, предлагается за момент начала интегрирования ускорения якоря ЭМ при срабатывании принимать момент времени, отстоящий от момента поступления управляющего сигнала на срабатывание ЭМ (момент подачи напряжения питания на его обмотку) на 0,1 Тгс, где Тгс - время гарантированного срабатывания ЭМ.
Момент окончания интегрирования для определения перемещения якоря ЭМ при срабатывании должен соответствовать моменту соприкосновения якоря со стопом. В этот момент измеряемое ускорение якоря меняет знак. Практически в этот же момент времени ток в обмотке ЭМ достигает своего локального минимума. Поэтому, если при технической реализации способа это удобно, можно за момент окончания интегрирования при срабатывании ЭМ принимать момент времени достижения током в обмотке ЭМ локального минимума при его срабатывании.
При отпускании ЭМ точное определение момента начала движения якоря по сигналу, соответствующему ускорению якоря, имеет те же технические трудности, что и при срабатывании. Поэтому предлагается, например, за момент начала интегрирования ускорения якоря ЭМ при отпускании принимать момент времени, отстоящий от момента поступления управляющего сигнала на отпускание ЭМ (момента отключения напряжения питания от его обмотки) на 0,1 Tго, где Тго - время гарантированного отпускания ЭМ.
Момент окончания интегрирования при отпускании ЭМ должен соответствовать моменту соприкосновения якоря с корпусом. В этот момент времени ускорение якоря при ударе о механическое препятствие меняет знак. Практически одновременно ток в обмотке ЭМ достигает своего локального максимума. Тогда момент времени достижения током в обмотке ЭМ локального максимума при его отпускании можно принимать за момент окончания интегрирования ускорения якоря ЭМ при отпускании.
Предлагаемый способ может преимущественно использоваться при отработке и испытаниях ЭМ. Он также полезен при анализе и настройках косвенных методов определения перемещения якоря по измерениям электрических параметров ЭМ. Получаемые при проведении испытаний данные о текущих значениях ускорения якоря ЭМ в каждый момент времени могут использоваться в режиме реального времени для формирования сигналов управления или запоминаться и накапливаться в виде массивов данных для последующей передачи их внешним устройствам для анализа и вторичной обработки. Сигнал, являющийся признаком достижения якорем конечного положения при срабатывании или отпускании ЭМ, также может передаваться по запросу внешним устройствам.
В этом случае массивы значений, соответствующих текущему положению, скорости перемещения и ускорению якоря ЭМ в каждый момент времени его движения при срабатывании и отпускании, запоминают в каждом рабочем цикле и передают по запросу внешним устройствам.
Следует отметить, что в случае использования получаемых экспериментальных данных только для анализа и вторичной обработки, операции интегрирования ускорения и скорости перемещения якоря могут выполняться уже в процессе вторичной обработки.
В качестве прототипа устройства для диагностики состояния якоря ЭМ при реализации предлагаемого способа выбрано устройство для определения положения якоря электромагнита, предложенное в описании патента [5].
Для решения задачи предлагаемого изобретения в устройство дополнительно введены последовательно соединенные акселерометр и режекторный фильтр, выход которого соединен с выводом (5) микроконтроллера, причем акселерометр жестко механически связан с якорем электромагнита, а его ось чувствительности ориентирована в направлении перемещения якоря.
Сущность предлагаемого технического решения поясняется чертежами.
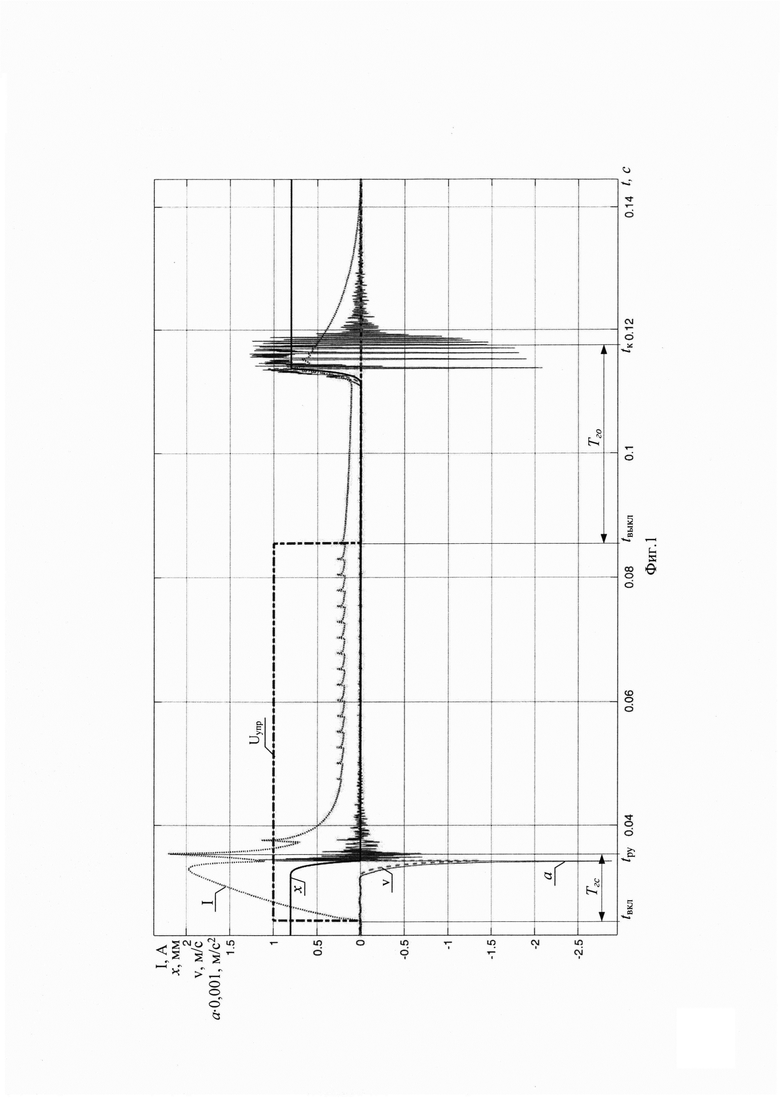
Фиг. 1. Экспериментальные переходные процессы изменения управляющего сигнала (Uупр) на включение и выключение ЭМ, ускорения (а) якоря ЭМ и тока (I) в его обмотке, зарегистрированные для одного рабочего цикла ЭМ, а также полученные в результате вторичной обработки переходные процессы изменения текущих значений скорости движения (v) и положения якоря (х).
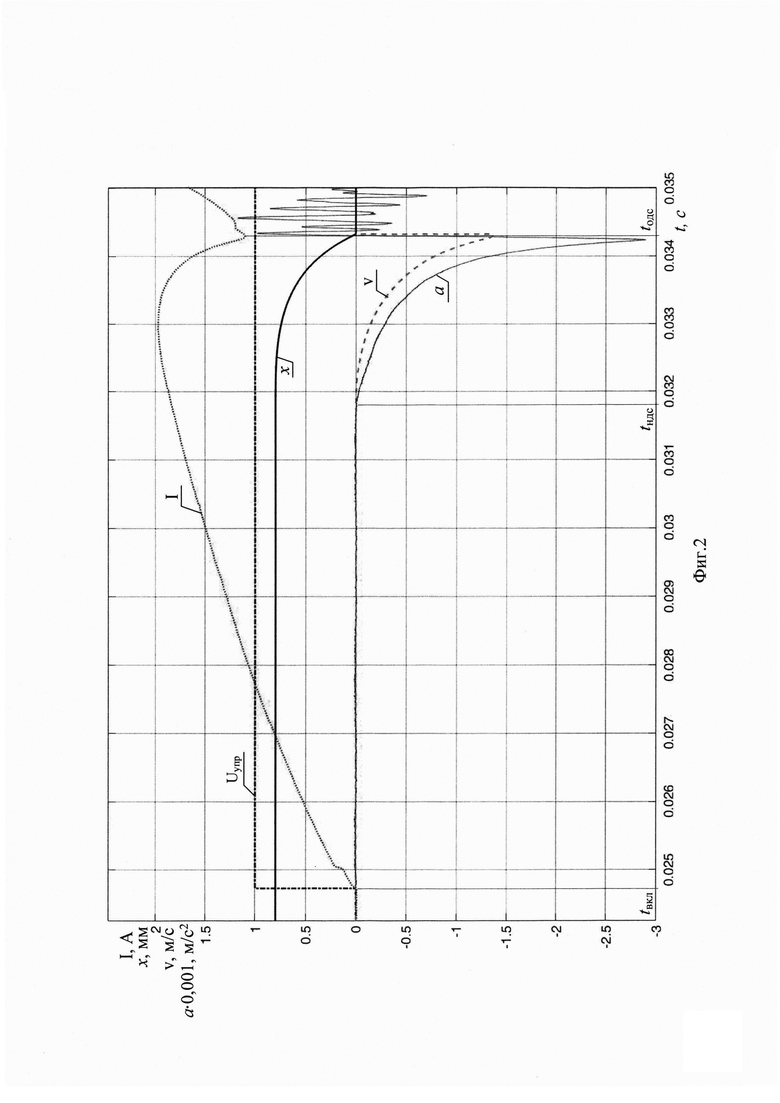
Фиг. 2. Экспериментальные переходные процессы изменения управляющего сигнала (Uупр) на включение ЭМ, ускорения (а) якоря ЭМ и тока (I) в его обмотке при его срабатывании, а также переходные процессы изменения текущих значений скорости движения (v) и положения (х) якоря ЭМ, полученные в результате вторичной обработки.
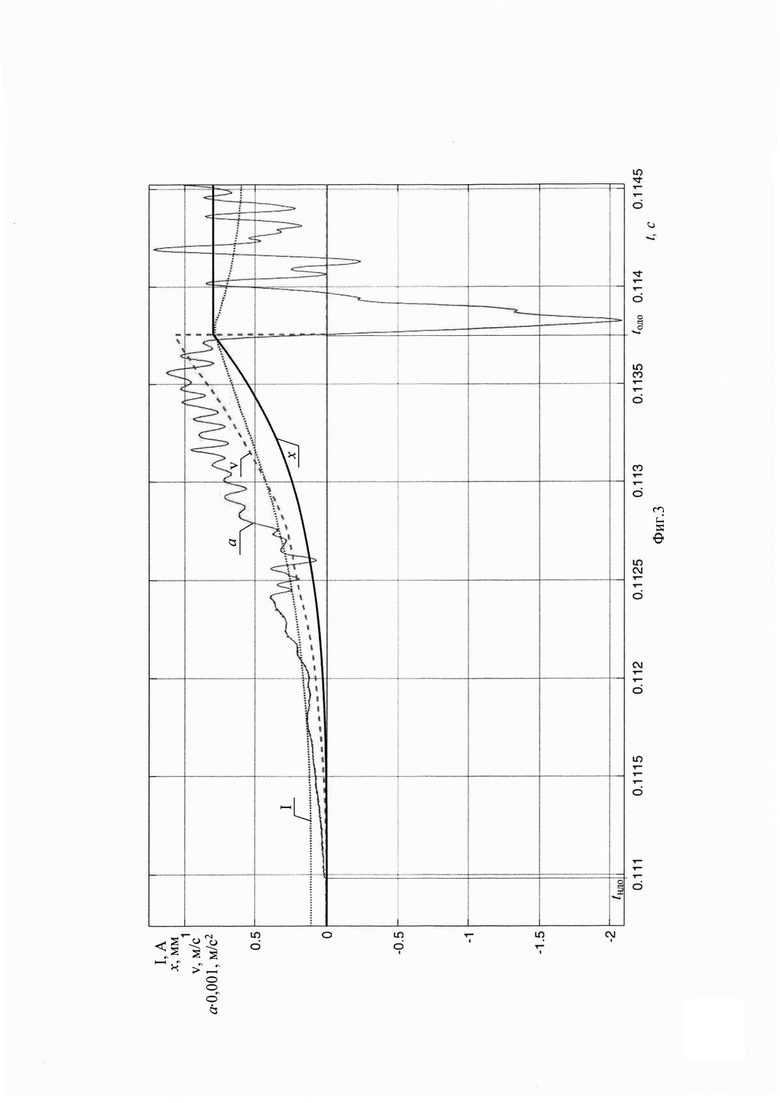
Фиг. 3. Экспериментальные переходные процессы изменения ускорения (а) якоря ЭМ и тока (I) в его обмотке при его отпускании, а также переходные процессы изменения текущих значений скорости движения (v) и положения (х) якоря ЭМ, полученные в результате вторичной обработки.
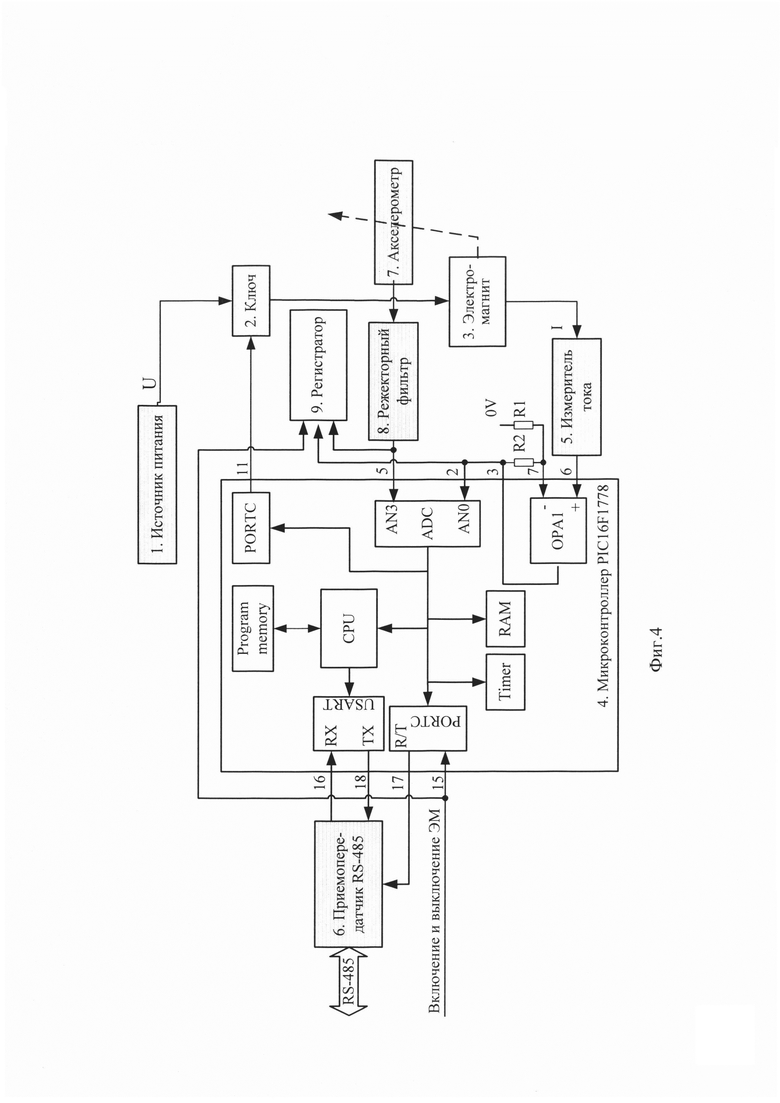
Фиг. 4. Функциональная схема устройства для диагностики состояния якоря ЭМ.
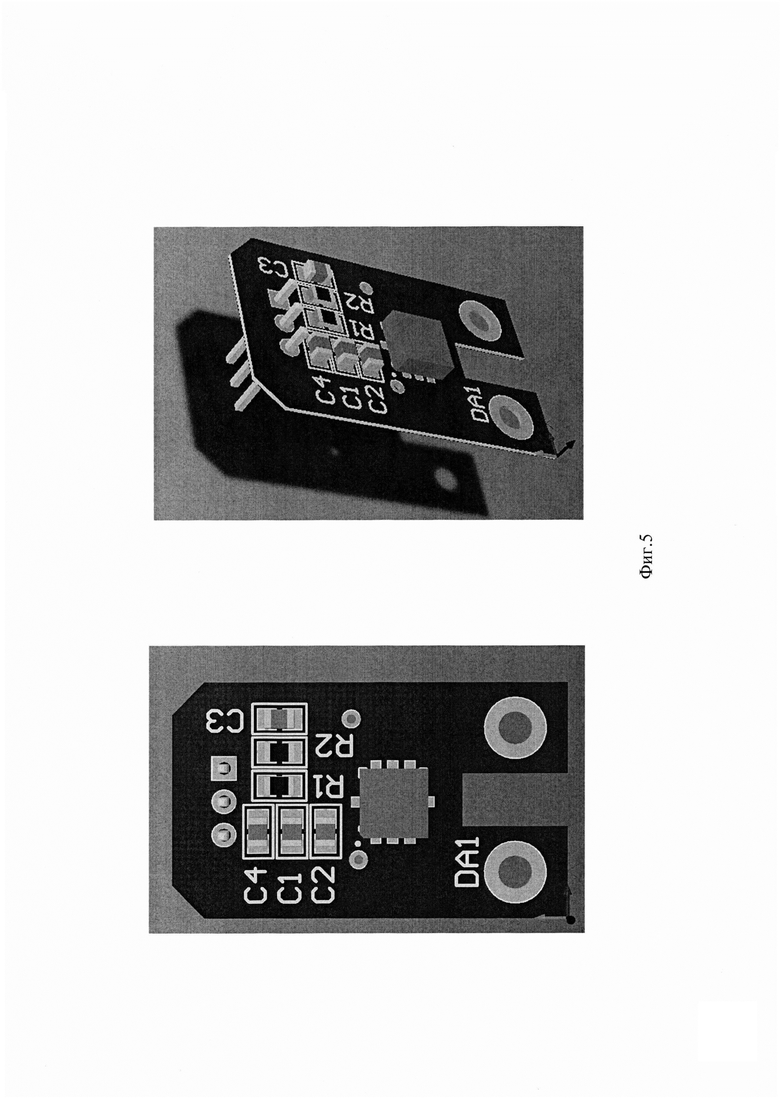
Фиг. 5. 3-D модель платы с установленным на ней акселерометром ADXL001, разработанной и использованной при экспериментальной отработке предлагаемого технического решения.
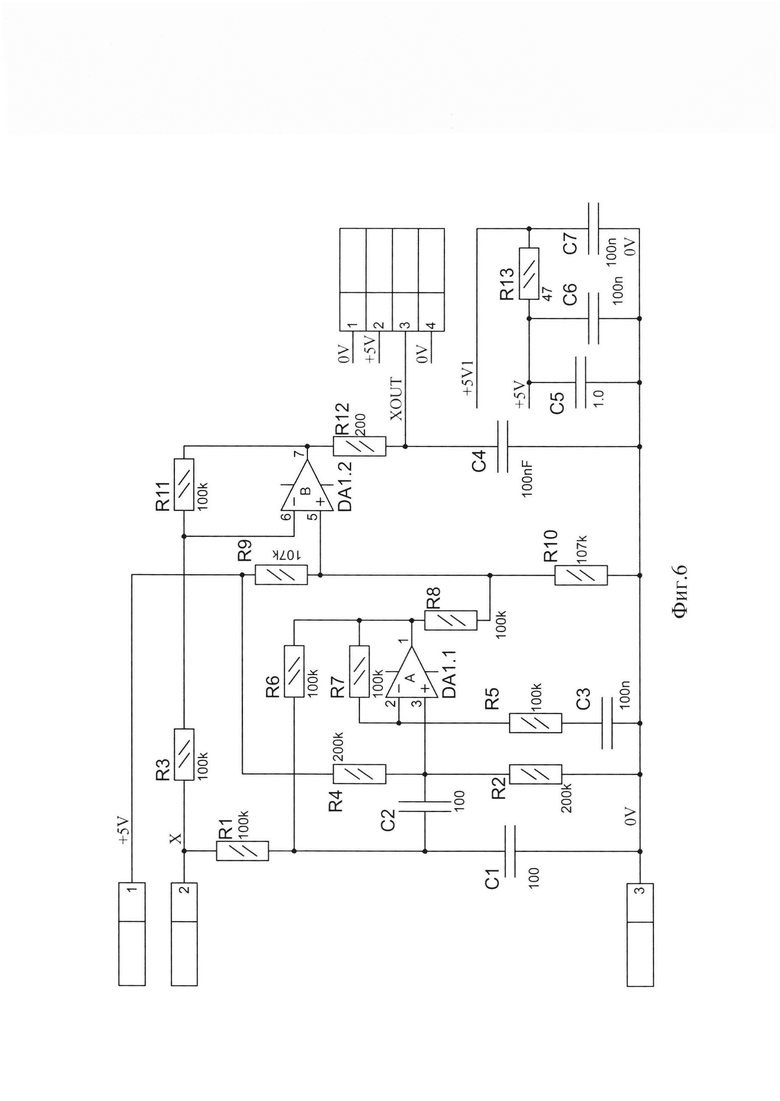
Фиг. 6. Электрическая принципиальная схема возможного исполнения режекторного фильтра, показанного на функциональной схеме устройства на фиг. 4.
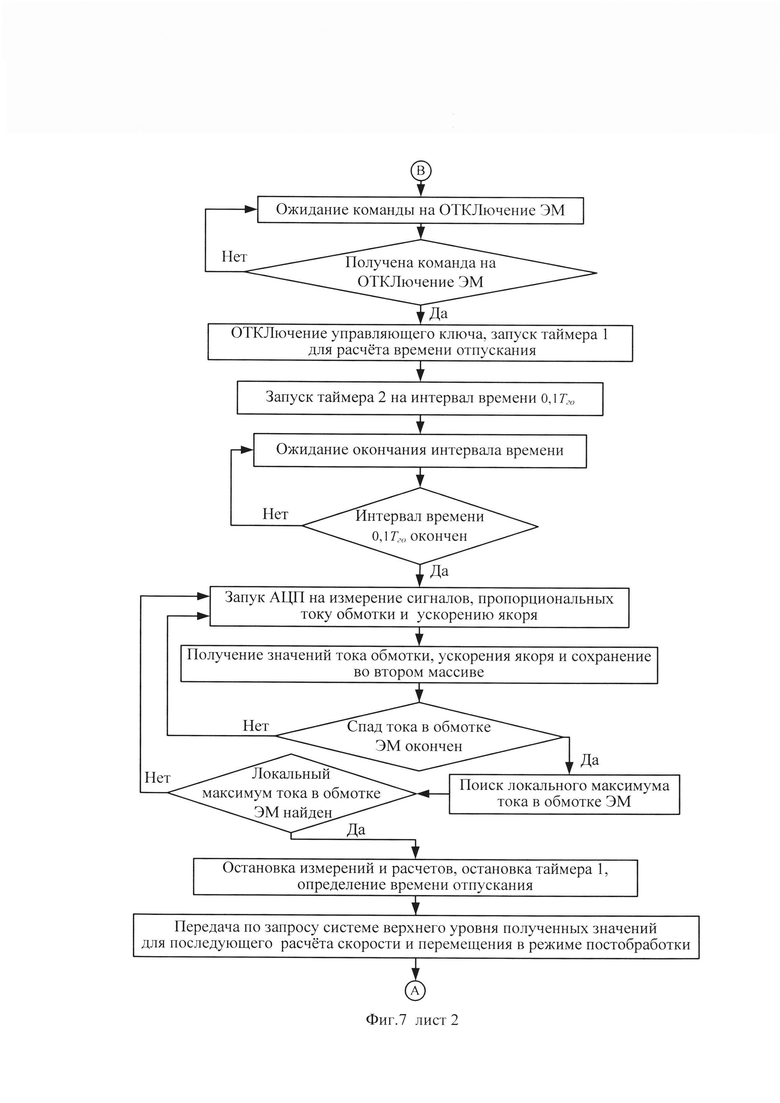
Фиг. 7. Блок-схема алгоритма, реализуемого при работе устройства для диагностики состояния якоря ЭМ.
Экспериментальная отработка предлагаемого способа проводилась на лабораторных испытаниях ЭМ втяжного типа с дисковым якорем.
При проведении испытаний (см. фиг. 1) регистрировались переходные процессы изменения управляющего сигнала (Uупр) на включение и выключение ЭМ, ускорения (а) якоря ЭМ и тока (I) в его обмотке для одного рабочего цикла ЭМ. Далее в результате вторичной обработки были получены переходные процессы изменения текущих значений скорости движения (v) и положения якоря (х). На фиг. 1 показаны моменты включения (tвкл) и выключения (tвыкл) ЭМ, а также момент времени перевода ЭМ в режим удержания (tру), который наступает после окончания отрезка времени Тгс от момента включения ЭМ. В режиме удержания обеспечивается стабилизация тока в обмотке ЭМ любым известным технически реализуемым методом (например, ШИМ). При выключении ЭМ контролируется момент времени tк, который отстоит от момента выключения ЭМ на отрезок времени Тгс. Момент времени tк считается моментом окончания рабочего цикла ЭМ.
На графиках фиг. 1 и последующих приведенных в описании графиках переходный процесс изменения ускорения якоря показан тонкой сплошной линией, процесс изменения управляющего сигнала - штрихпунктирной линией, процесс изменения скорости движения якоря на отрезке интегрирования ускорения - пунктирной линией, процесс изменения положения якоря на отрезке интегрирования скорости (совпадающим с отрезком интегрирования ускорения) - толстой сплошной линией, а процесс изменения тока в обмотке ЭМ - пунктирной линией.
Более подробно переходные процессы на участке срабатывания ЭМ показаны на фиг. 2. На этом графике показаны момент времени начала движения якоря при срабатывании (tндc) и момент соприкосновения якоря со стопом (окончания движения якоря при срабатывании) (toдс). Здесь видно, что в момент соприкосновения якоря со стопом происходит изменение знака ускорения, и практически в этот же момент времени достигается локальный минимум тока в обмотке ЭМ. Этот факт, если это удобно при технической реализации, может быть использован для определения момента окончания интегрирования ускорения при срабатывании.
Подробные переходные процессы изменения рассматриваемых параметров ЭМ при отпускании приведены на фиг. 3. На этом графике показаны момент начала движения якоря ЭМ при отпускании (tндo) и момент соприкосновения якоря с упором при отпускании (toдо), считающийся моментом окончания движения при отпускании, в который заканчивается интегрирование ускорения. В момент времени tодо ускорение меняет знак. Практически в этот же момент времени, как видно из графика, ток в обмотке ЭМ достигает своего локального максимума, что может быть использовано для определения момента окончания интегрирования ускорения при отпускании, если это удобно при технической реализации.
Момент начала движения якоря ЭМ как при срабатывании, так и при отпускании характеризуется низкой скоростью нарастания ускорения. Из-за этого и наличия постоянных случайных помех, действующих на выходной сигнал акселерометра, проблематичным становится использование пороговых методов для определения момента начала интегрирования ускорения. Тогда, учитывая нулевое математическое ожидание случайной помехи при правильной установке «нуля» акселерометра, момент начала интегрирования ускорения при технической реализации можно формировать, привязываясь к командному сигналу на включение и выключение ЭМ. Это и предлагается делать при технической реализации, а именно, начинать интегрирование выходного сигнала акселерометра, отступив от момента подачи сигнала на включение и выключение ЭМ на небольшой защитный интервал для снижения влияния коммутационных помех на результат интегрирования.
При технической реализации интегрирование электрического сигнала, пропорционального ускорению, может быть, в зависимости от решаемой задачи, либо реализовано в режиме реального времени, если формируемые при этом сигналы, соответствующие текущей скорости движения якоря и текущему значению перемещения якоря, используются для формирования сигналов управления ЭМ, либо это интегрирование может проводиться при вторичной обработке результатов испытаний. Тогда массивы значений, соответствующих текущему положению, скорости перемещения и ускорению якоря электромагнита в каждый момент времени его движения при срабатывании и отпускании, запоминают в каждом рабочем цикле и передают по запросу внешним устройствам. Такая информация может использоваться, например, при анализе результатов испытаний или при разработке косвенных методов определения текущих значений положения якоря и скорости его движения. Сигнал, являющийся признаком достижения якорем конечного положения при срабатывании или отпускании ЭМ, также может передаваться по запросу внешним устройствам.
Функциональная схема возможного исполнения устройства для реализации предлагаемого способа диагностики состояния якоря ЭМ приведена на фиг. 4. Устройство содержит последовательно соединенные источник питания (1) и ключ (2), выход которого соединен со входом ЭМ (3), а также микроконтроллер PIC16F1778 (4), измеритель тока (5), два резистора (R1 и R2) и приемопередатчик RS-485 (6), связанный двунаправленной линией с внешними устройствами, вывод 11 микроконтроллера (МК) (4) соединен с управляющим входом ключа (2), вывод 6 МК (4) соединен с выходом измерителя тока (5), вход которого соединен с выходом ЭМ (3), вывод 16 МК (4) соединен с выходом приемопередатчика RS-485 (6), два входа которого соединены соответственно с выводами 17 и 18 МК (4), вывод 15 которого соединен с дискретным выходом системы верхнего уровня, первый вывод первого резистора (R1) соединен с отрицательным выводом (0V) источника питания (1), первый вывод второго резистора (R2) соединен с выводами 2 и 3 МК (4), вывод 7 которого соединен со вторыми выводами обоих резисторов (R1 и R2). Устройство также содержит акселерометр (7), режекторный фильтр (8) и регистратор (9) с тремя входами, причем выход режекторного фильтра (8) соединен с выводом 5 МК (4) и первым входом регистратора (9), второй вход которого соединен со выводами 2 и 3 МК (4), вывод 15 которого соединен с третьим входом регистратора (9), а акселерометр (7) жестко механически связан с якорем ЭМ (3), и его ось чувствительности ориентирована в направлении перемещения якоря.
Для снижения присоединенной к якорю массы использован микромеханический акселерометр ADXL001-250BEZ [6] выполненный с использованием iMEMs процесса, в корпусе LCC9 с размерами 5×5×1,78 мм.
На фиг. 5 представлена 3-D модель платы с установленным на ней акселерометром ADXL001. Эта плата была разработана в САПР "Altium Designer". Ее конструкция позволяет обеспечить жесткое соединение со штоком якоря ЭМ, использованного при экспериментальной отработке предлагаемого технического решения. При закреплении платы на штоке якоря ЭМ ось чувствительности акселерометра будет ориентирована в направлении перемещения якоря, что обеспечит корректное измерение его ускорения.
На фиг. 6 предлагается электрическая принципиальная схема возможного исполнения режекторного фильтра (поз.8 на фиг. 4), выполненная в соответствии с рекомендациями [7]. Использование режекторного фильтра вызвано необходимостью подавления паразитного резонанса на верхней границе измерительного диапазона - акселерометра - 22кГц.
Работает устройство следующим образом.
Источник питания (1) обеспечивает напряжение, необходимое для срабатывания ЭМ (3), и напряжение 5 В для питания элементов схемы.
МК (4) управляет работой ключа (2) и приемопередатчика RS-485 (6). Кроме того, МК (4) обеспечивает прием сигналов управления от системы верхнего уровня и обеспечивает в соответствии с этими сигналами включение и выключение ЭМ (3). МК (4) осуществляет также аналого-цифровое преобразование сигналов соответствующих току ЭМ и ускорению якоря, расчет текущих значений скорости перемещения и положения, запоминание в каждом рабочем цикле полученных массивов значений, в каждый момент времени его движения при срабатывании и отпускании, и передачу по запросу этих массивов данных внешним устройствам. С целью снижения влияния помех, возникающих в моменты коммутации индуктивной нагрузки, преобразование измеряемых параметров начинается после окончания защитного интервала определяемого как 0,1 Тгс и 0,1 Тго, для срабатывания и отпускания ЭМ соответственно. Длительность защитного интервала обеспечивает Timer1 modul, срабатывающий по перепаду сигнала управления ключом (2). Для полного использования разрядности АЦП (ADC), при минимальных потерях в силовой цепи протекания тока ЭМ, выходной сигнал измерителя тока (5) поступает на неинвертирующий вход операционного усилителя (ОРА1) из состава МК (4), на котором выполнен неинвертирующий усилитель с коэффициентом усиления K=1+R2/R1. По результатам преобразования тока ЭМ(3) при срабатывании определяется локальный минимум тока, свидетельствующий об окончании срабатывания ЭМ (3). В момент достижения локального минимума тока заканчивается преобразование ускорения и расчет скорости и перемещения якоря ЭМ (3). После чего схема переходит в режим стабилизации тока на уровне необходимом для его надежного удержания после срабатывания. Стабилизация тока может осуществляться, например, с использованием релейного регулятора (программно реализованного в МК (4)), выполняющего включение ключа (2) при снижении величины тока до минимального порогового значения и выключение при достижении максимального порогового значения. При поступлении команды на выключение ЭМ (3) и окончании защитного временного интервала 0,1 Тго МК(4) запускает циклическое преобразование сигналов соответствующих току в обмотке ЭМ (3) и ускорению якоря до момента обнаружения локального максимума тока в обмотке ЭМ (3). Этот момент времени соответствует окончанию перемещения якоря ЭМ (3) при отпускании. Сигнал, являющийся признаком достижения якорем конечного положения при срабатывании или отпускании ЭМ (3), с помощью МК (4) может использоваться при формировании сигналов управления ЭМ, или передаваться по запросу внешним устройствам.
Приемопередатчик RS-485 (6) преобразует логические сигналы МК (4) в дифференциальный сигнал полудуплексной интерфейсной многоточечной линии в соответствии с требованиями стандарта [8]. В качестве приемопередатчика RS-485 (6) может быть применена микросхема SN65HVD1785 [9]. Эта микросхема предназначена для использования в качестве приемопередатчика по стандарту RS-485 и для организации полудуплексного канала связи по соответствующим стандартам. Приемопередатчик RS-485 (6) соединен с модулем универсального асинхронного приемопередатчика UART (Universal Asynchronous Receiver Transmitter) МК (4), представляющего собой его периферийное устройство. Дополнительный сигнал управления направлением передачи информации (RYT) формируется программно. В качестве МК (4), как уже отмечалось, использован восьмиразрядный микроконтроллер PIC16F1778-I/SO [10]. В качестве управляемого ключа (2) в устройстве может быть использован ключ верхнего уровня IPS511G [11]. ЭМ (3) является объектом контроля и управления. В качестве регистратора (9) может быть использован четырехканальный цифровой осциллограф, например R&S®RTE1034 [12].
Ключ (2) является управляемым силовым ключом, выполняющим коммутацию напряжения на ЭМ (3) по сигналам управления. В качестве управляющего сигнала может использоваться или дискретный сигнал, поступающий на вывод 15 МК (4), или команда, переданная по последовательному интерфейсу через приемопередатчик RS-485 (6) и модуль USART МК (4). Измеритель тока (5) выполняет нормирование тока I, протекающего через обмотку ЭМ (3), то есть преобразование его в напряжение, пропорциональное этому току. Для согласования полученного напряжения с входным диапазоном АЦП (ADC) использован операционный усилитель ОРА1, входящий в состав периферийных устройств МК (4).
Блок-схема алгоритма, реализуемого при работе устройства для диагностики состояния якоря ЭМ, представлена на фиг. 7. Она отражает последовательность и цикличность основных операций, выполняемых при реализации предлагаемого технического решения для диагностики состояния якоря ЭМ при его срабатывании и отпускании.
Таким образом, предлагаемое техническое решение позволяет значительно расширить функциональные возможности диагностики состояния якоря ЭМ за счет получения и обработки информации об ускорении якоря ЭМ при экспериментальной отработке ЭМ. Информация о текущих значениях скорости перемещения и текущем положении якоря ЭМ может быть использована при разработке алгоритмов управления, позволяющих проводить их оптимизацию по различным критериям. Кроме того, появляется возможность калибровки косвенных методов контроля текущего положения якоря ЭМ на основе измерения напряжения или тока, когда ЭМ используется, например, в составе электроклапана.
ИСТОЧНИКИ ИНФОРМАЦИИ
1. Method for determining the instant when the movable element of a solenoid valve reaches its end position. EP 2072791 Al. Date of publication: 24.06.2009, Bulletin 2009/26.
2. DETECTION OF VALVE OPEN TIME FOR SOLENOID OPERATED FUEL INJECTORS. US 2017/0234920 A1. Pub. Date: Aug. 17, 2017.
3. DETECTION OF VALVE OPEN TIME FOR SOLENOID OPERATED FUEL INJECTORS. WO 2017/142727 A1. International Publication Date 24 August 2017 (24.08.2017).
4. DRIVE DEVICE FOR FUEL INJECTION DEVICE. EP 2955365 B1. Date of publication and mention of the grant of the patent: 18.07.2018 Bulletin 2018/29.
5. Способ определения положения якоря электромагнита и устройство для его осуществления. RU 2717952 С1. Опубликовано: 27.03.2020 Бюл. №9.
6. Analog Devices. High Performance, Wide Bandwidth Accelerometer ADXL001. https://www.analog.com/media/en/technical-documentation/data-sheets/ ADXL001.pdf.
7. Analog Devices. MEMS-Based Vibration Analyzer with Frequency Response Compensation Circuit Note CN-0303 https://www.analog.com/media/en/reference-design-documentation/reference-designs/CN0303.pdf
8 ANSI TIA/EIA RS-485-A: (Recommended standard 485 Edition A) 1998 Electrical Characteristics of Generators and Receivers for Balanced Digital Multipoint Systems.
9. http://www.ti.com/lit/ds/symlink/sn65hvd1785.pdf
10. 28/40/44-Pin, 8-Bit Flash Microcontroller www.microchip.com/product/en/ PIC16F1778 DS40001819B.pdf
11. http//www.irf.com/pproduct-ir/datashits/data/ips511.pdf
12. Осциллографы цифровые R&S RTE Руководство по эксплуатации http//rodeschwarz.shop/catalog/ostcillografy/rode_schwarz_rte1034/
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ ЯКОРЯ ЭЛЕКТРОМАГНИТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2020 |
|
RU2747003C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ ЯКОРЯ ЭЛЕКТРОМАГНИТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2020 |
|
RU2746039C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ ЯКОРЯ ЭЛЕКТРОМАГНИТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2019 |
|
RU2717952C1 |
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОМАГНИТНЫМ КЛАПАНОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2022 |
|
RU2783869C1 |
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОМАГНИТНЫМ КЛАПАНОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2022 |
|
RU2795208C1 |
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОМАГНИТНЫМ КЛАПАНОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2020 |
|
RU2756292C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ ЯКОРЯ ЭЛЕКТРОМАГНИТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2023 |
|
RU2802271C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ ЯКОРЯ ЭЛЕКТРОМАГНИТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2022 |
|
RU2793305C1 |
| СПОСОБ МОНИТОРИНГА ДАВЛЕНИЯ НА ВХОДЕ ГАЗОВОГО ЭЛЕКТРОМАГНИТНОГО КЛАПАНА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2023 |
|
RU2802294C1 |
| СПОСОБ МОНИТОРИНГА ДАВЛЕНИЯ НА ВХОДЕ ГАЗОВОГО ЭЛЕКТРОМАГНИТНОГО КЛАПАНА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2024 |
|
RU2832565C1 |

Изобретение относится к электротехнике и может быть использовано для диагностики состояния приводных электромагнитов (ЭМ) клапанов и коммутационных аппаратов. Технический результат состоит в расширении функциональных возможностей. Текущее значение ускорения якоря преобразуют в пропорциональный ему электрический сигнал. Интегрируют его на временном интервале движения якоря от начала его перемещения до момента соприкосновения со стопом при срабатывании или до момента соприкосновения якоря с упором при отпускании, формируя таким образом сигнал, пропорциональный текущему значению скорости движения якоря. Интегрируют на том же временном интервале этот сигнал, формируя в каждый момент времени сигнал, пропорциональный текущему положению якоря во время его перемещения, фиксируют момент достижения якорем механического ограничителя (стопа при срабатывании и упора при отпускании), характеризующийся изменением знака ускорения, и формируют в этот момент времени сигнал, являющийся признаком достижения якорем конечного положения при срабатывании или отпускании ЭМ. Предложены варианты технической реализации временных интервалов интегрирования сигнала, пропорционального текущему значению ускорения якоря ЭМ. Разработана функциональная схема устройства для диагностики состояния якоря ЭМ, ориентированная на использование в качестве управляющего элемента микроконтроллера PIC16F1778, обеспечивающего реализацию операций заявленного способа. Предложен алгоритм работы устройства для диагностики состояния якоря ЭМ. Работоспособность и эффективность предлагаемого технического решения подтверждены экспериментально. 2 н. и 5 з.п. ф-лы, 7 ил.
1. Способ диагностики состояния якоря электромагнита, включающий преобразование текущего значения ускорения одной из частей электромагнита в пропорциональный ему электрический сигнал, регистрацию этого сигнала, определение положения якоря электромагнита и формирование признака, характеризующего состояние электромагнита, отличающийся тем, что преобразуют текущее значение ускорения якоря в пропорциональный ему электрический сигнал, интегрируют его на временном интервале движения якоря от начала его перемещения до момента соприкосновения со стопом при срабатывании или до момента соприкосновения якоря с упором при отпускании, формируя таким образом сигнал, пропорциональный текущему значению скорости движения якоря, интегрируют на том же временном интервале этот сигнал, формируя в каждый момент времени сигнал, пропорциональный текущему положению якоря во время его перемещения, фиксируют момент достижения якорем механического ограничителя (стопа при срабатывании и упора при отпускании), характеризующийся изменением знака ускорения, и формируют в этот момент времени сигнал, являющийся признаком достижения якорем конечного положения при срабатывании или отпускании электромагнита.
2. Способ диагностики состояния якоря электромагнита по п. 1, отличающийся тем, что за момент начала интегрирования ускорения якоря электромагнита при срабатывании принимают момент времени, отстоящий от момента поступления управляющего сигнала на срабатывание электромагнита (момент подачи напряжения питания на его обмотку) на 0,1 Тгс, где Тгс - время гарантированного срабатывания электромагнита.
3. Способ диагностики состояния якоря электромагнита по п. 1, отличающийся тем, что за момент окончания интегрирования ускорения при срабатывании электромагнита принимают момент времени достижения током в обмотке электромагнита локального минимума при его срабатывании.
4. Способ диагностики состояния якоря электромагнита по п. 1, отличающийся тем, что за момент начала интегрирования ускорения якоря электромагнита при отпускании принимают момент времени, отстоящий от момента поступления управляющего сигнала на отпускание электромагнита (момента отключения напряжения питания от его обмотки) на 0,1 Тго, где Тго - время гарантированного отпускания электромагнита.
5. Способ диагностики состояния якоря электромагнита по п.1, отличающийся тем, что за момент окончания интегрирования ускорения при отпускании электромагнита принимают момент времени достижения током в обмотке электромагнита локального максимума при его отпускании.
6. Способ диагностики состояния якоря электромагнита по п.1, отличающийся тем, что сигнал, являющийся признаком достижения якорем конечного положения при срабатывании или отпускании электромагнита, и массивы значений, соответствующих текущему положению, скорости перемещения и ускорению якоря электромагнита в каждый момент времени его движения при срабатывании и отпускании, запоминают в каждом рабочем цикле и передают по запросу внешним устройствам.
7. Устройство для диагностики состояния якоря электромагнита, содержащее последовательно соединенные источник питания и ключ, выход которого соединен со входом электромагнита, а также микроконтроллер PIC16F1778, измеритель тока, два резистора и приемопередатчик RS-485, связанный двунаправленной линией с внешними устройствами, вывод 11 микроконтроллера соединен с управляющим входом ключа, вывод 6 микроконтроллера соединен с выходом измерителя тока, вход которого соединен с выходом электромагнита, вывод 16 микроконтроллера соединен с выходом приемопередатчика RS-485, два входа которого соединены соответственно с выводами 17 и 18 микроконтроллера, вывод 15 которого соединен с дискретным выходом системы верхнего уровня, первый вывод первого резистора соединен с отрицательным выводом источника питания, первый вывод второго резистора соединен с выводами 2 и 3 микроконтроллера, вывод 7 которого соединен со вторыми выводами обоих резисторов, отличающееся тем, что в него дополнительно введены акселерометр, режекторный фильтр и регистратор с тремя входами, причем выход режекторного фильтра соединен с выводом 5 микроконтроллера и первым входом регистратора, второй вход которого соединен с выводами 2 и 3 микроконтроллера, вывод 15 которого соединен с третьим входом регистратора, а акселерометр жестко механически связан с якорем электромагнита и его ось чувствительности ориентирована в направлении перемещения якоря.
| СПОСОБ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ ЯКОРЯ ЭЛЕКТРОМАГНИТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2019 |
|
RU2717952C1 |
| EP 2955365 A1, 16.12.2015 | |||
| WO 2017142727 A1, 17.08.2017 | |||
| US 2017234920 A1, 17.08.2017 | |||
| EP 20727791 A1, 24.06.2009. | |||

