Изобретение относится к системам радиосвязи с подвижными объектами (ПО) и может быть использована для обмена данными через наземные комплексы (НК) с оборудованием подвижных объектов, в частности, воздушных судов (ВС) и получателями информации системы управления воздушным движением (УВД).
Известна авиационная система связи, адресации и донесений ACARS. Она обеспечивает вызов на речевую связь и передачу данных [1-3] и состоит из бортового и наземного комплексов связи. Бортовой блок управления и связи представляет собой процессор. Основным каналом обмена текущей информацией является MB канал (канал диапазона метровых волн). Организацию обмена информацией между наземными службами гражданской авиации и бортовыми системами осуществляет наземный комплекс. Он опрашивает воздушные суда, находящиеся в зоне прямой видимости, и собирает с них необходимую информацию, в том числе по запросу. Бортовое оборудование работает в этом случае в режиме адресного опроса. Для того, чтобы «бортовая система могла работать в режиме адресного опроса, ей необходимо встать на обслуживание в наземной системе. Для этого в бортовом оборудовании предусмотрен режим прямого доступа. Кроме этих двух режимов, предусмотрена возможность работы в режиме телефонной связи по каналу передачи данных [1, 2].
К недостаткам представленной системы следует отнести отсутствие предупреждения о предстоящей потере связи из-за потери прямой видимости и влияния отражения радиоволн от поверхности Земли и защиты от этих процессов.
Известна система радиосвязи с подвижными объектами - RU №44907, (опубл. 27.03.2005) [4]. В этой системе во время движения подвижные объекты, находящиеся в пределах радиогоризонта, обмениваются данными с наземным комплексом. Принимаемые наземным комплексом из канала «воздух - земля» сообщения через аппаратуру передачи данных поступают в наземный вычислитель на базе ПЭВМ, где, в соответствии с принятым в системе протоколом обмена, осуществляется идентификация принятого в сообщении адреса с адресами подвижных объектов, хранящимися в его памяти. При совпадении адреса подвижного объекта с хранящимся в списке адресом информация о местоположении, параметрах движения ВС выводится на экран монитора наземного автоматического рабочего места (АРМ). В наземном вычислителе АРМ на базе ПЭВМ решается задача обеспечения постоянной радиосвязи со всеми N ВС. При выходе за пределы радиогоризонта хотя бы одного из ВС или приближении к границе зоны устойчивой радиосвязи, программно определяется один из ВС, который назначается ретранслятором сообщений. По результатам анализа местоположения и параметров движения остальных ВС определяются оптимальные пути доставки сообщений удаленному от НК за радиогоризонт выбранному воздушному судну. Сообщение от НК через последовательную цепочку, состоящую из (N-1) ВС, может быть доставлено N-му ВС. Для этого на НК в формирователе типа ретранслируемых сообщений в заранее определенные разряды (заголовок) передаваемой кодограммы закладываются номер ВС, назначенного ретранслятором, и адреса воздушных судов, обеспечивающих заданный трафик сообщения. Принятые на ВС сообщения анализируются в блоке анализа типа сообщений. После анализа решается вопрос о направлении данных по двунаправленной шине на систему управления объекта или ретрансляции их на соседнее воздушное судно.
В обычном режиме, когда не требуется ретрансляция сигналов с НК, осуществляется адресный опрос ВС путем формирования сообщения для передачи в канал радиосвязи в соответствии с протоколом обмена. Набираемое оператором (диспетчером) сообщение отображается на мониторе АРМ. На ВС после прохождения через антенну, радиостанцию, аппаратуру передачи данных сигнал поступает в бортовой вычислитель, где происходит идентификация принятого в сообщении адреса с собственным адресом подвижного объекта. Далее сообщение передается в блок анализа типа ретранслируемого сообщения, где происходит дешифрация полученного заголовка (служебной части) сообщения, и определяется, в каком режиме должна работать аппаратура ВС. Информационная часть сообщения записывается в память бортового вычислителя и при необходимости выводится на экран блока регистрации данных.
Формирователи типа ретранслируемых сообщений позволяют обеспечить обмен цифровыми данными по каналу «диспетчер-пилот» взамен существующей речевой информации. Они предназначены для выбора элементов сообщений разрешения/информации/запроса, которые соответствуют принятой речевой фразеологии, и набора произвольного текста. Отображение набираемых и принятых сообщений осуществляется на блоке регистрации данных ВС и мониторе АРМ НК соответственно.
Сообщения с выходов приемников сигналов глобальных навигационных спутниковых систем ГЛОНАСС/GPS записываются в память наземного и бортового вычислителей с привязкой к глобальному времени и используются для расчета навигационных характеристик и параметров движения каждого ВС. Принятые на НК навигационные сообщения от всех ВС обрабатываются в вычислителе и выводятся на экран монитора АРМ.
К недостаткам аналога следует отнести отсутствие предупреждения о предстоящей потере связи из-за потери прямой видимости и влияния отражения радиоволн от поверхности Земли и защиты от этих процессов.
Известна система радиосвязи с подвижными объектами - RU №58276, (опубл. 10.11.2006) [5], которая по совокупности признаков наиболее близка к заявляемому изобретению и принята в качестве прототипа. В данной системе каждый из N ПО содержит бортовые датчики, приемник сигналов глобальных навигационных спутниковых систем, блок анализа типа принимаемых сообщений и бортовой формирователь типа ретранслируемых сообщений, каждый из которых соединен с соответствующими входами бортового вычислителя, вход/выход которого подключен к двунаправленной шине системы управления ПО. Бортовой вычислитель соединен с входом блока регистрации данных и, через последовательно соединенные бортовую аппаратуру передачи данных, первую бортовую радиостанцию, подключен к первой бортовой антенне. Вход/выход блока хранения характеристик ПО, в том числе информации метеорологических датчиков подвижных объектов, подключен двухсторонними связями к соответствующему входу/выходу бортового вычислителя. Первый и второй входы/выходы второй бортовой радиостанции подключены двухсторонними связями к соответствующим входам/выходам бортового вычислителя и бортовой аппаратуры передачи данных соответственно, а третий вход/выход - к второй бортовой антенне. НК системы содержит первую антенну, первую радиостанцию, подключенную двухсторонними связями через аппаратуру передачи данных к первому входу/выходу вычислителя автоматизированного рабочего места (АРМ). Первый вход вычислителя АРМ подключен к приемнику сигналов глобальных навигационных спутниковых систем, второй вход - к пульту управления АРМ, а выход - к монитору АРМ. Формирователь типа ретранслируемых сообщений соединен с соответствующим входом вычислителя АРМ. Первый и второй входы/выходы второй наземной радиостанции подключены двухсторонними связями к соответствующим входам/выходам вычислителя АРМ и наземной аппаратуры передачи данных соответственно, а третий вход/выход - к второй наземной антенне. Вход/выход блока хранения программ подключен двухсторонними связями к соответствующему входу/выходу вычислителя АРМ, первый и второй входы/выходы вычислителя параметров областей опасных явлений подключены двухсторонними связями к соответствующим входам/выходам вычислителя АРМ и m подсистемам передачи данных соответственно, а третий вход/выход - к блоку отображения метеоинформации. Входы/выходы m подсистем передачи данных являются входами/выходами наземного комплекса, где m - общее число потребителей и источников метеоинформации. Передача данных с наземного комплекса обеспечивается по цепочке последовательно соединенных первого ПО, второго ПО и далее до N-го ПО, а передача данных с N-го ПО на НК осуществляется в обратном порядке.
Прототипу присущи недостатки, связанные с отсутствием предупреждения о предстоящем «обрыве» связи из-за потери прямой видимости, а так же отсутствием учета влияния отражения радиоволн от поверхности Земли и защиты от этих процессов.
Техническая проблема, решаемая настоящим изобретением, заключается в повышении надежности связи.
Технический результат заключается в формировании сигналов предупреждения о предстоящем «обрыве» связи из-за потери прямой видимости и уменьшения отношения сигнал/шум на выходе приемного устройства в результате влияния отражения радиоволн от поверхности Земли, а так же защите от этих процессов путем передачи сформированных сигналов абонентам, участвующим в сеансе связи, для оперативного изменения параметров движения ПО, с целью предупреждения «обрыва» связи.
Указанный технический результат достигается тем, что в систему радиосвязи с подвижными объектами, состоящую из наземного комплекса, содержащего наземный формирователь типа ретранслируемых сообщений, первую наземную антенну, соединенную с первой наземной радиостанцией, подключенной двухсторонними связями через аппаратуру передачи данных к первому входу/выходу вычислителя автоматизированного рабочего места, первый вход которого подключен к наземному приемнику сигналов глобальных навигационных спутниковых систем, второй вход - к пульту управления АРМ, а выход - к монитору АРМ, вторая наземная антенна соединена с второй наземной радиостанцией, вход/выход которой подключен двухсторонней связью к соответствующему входу/выходу наземной аппаратуры передачи данных, блок хранения программ, вход/выход которого подключен двухсторонними связями к второму входу/выходу вычислителя АРМ, входы/выходы m подсистем передачи данных являются входами/выходами наземного комплекса, где m - общее число потребителей и источников информации, N подвижных объектов, в состав каждого из которых входят бортовые датчики, бортовой приемник сигналов глобальных навигационных спутниковых систем, каждый из которых соединен с соответствующим входом бортового вычислителя, выход которого соединен с входом блока регистрации данных, первый вход/выход бортового вычислителя подключен к двунаправленной шине системы управления ПО, а второй вход/выход через последовательно соединенные двухсторонними связями бортовую аппаратуру передачи данных, первую бортовую радиостанцию подключен к первой бортовой антенне, блок анализа типа принимаемых сообщений, бортовой формирователь типа ретранслируемых сообщений, блок хранения характеристик ПО, вход/выход которого подключен двухсторонними связями к третьему входу/выходу бортового вычислителя, вторая бортовая антенна соединена с второй бортовой радиостанцией, вход/выход которой подключен к соответствующему входу/выходу бортовой аппаратуры передачи данных, причем передача данных с наземного комплекса обеспечивается по цепочке последовательно соединенных первого ПО, второго ПО и далее до N-го ПО, а передача данных с N-го ПО на НК осуществляется в обратном порядке, дополнительно введены на ПО бортовой модуль оценки дальности прямой видимости и отношения сигнал/шум, подключенный двухсторонними связями к четвертому входу/выходу бортового вычислителя, пятый вход/выход бортового вычислителя соединен с бортовым формирователем типа ретранслируемых сообщений, шестой вход/выход - с блоком анализа типа принимаемых сообщений, при этом седьмой вход/выход бортового вычислителя является входом/выходом загрузки параметров, а в НК дополнительно введены наземный модуль оценки дальности прямой видимости и отношения сигнал/шум, подключенный двухсторонними связями к третьему входу/выходу вычислителя АРМ, блоку отображения информации по организации связи, подключенный к четвертому входу/выходу вычислителя АРМ, вычислитель параметров по организации связи, первый вход/выход которого подключен к пятому входу/выходу вычислителя АРМ, а второй вход/выход - к m подсистем передачи данных, а третий вход/выход - к блоку отображения информации по организации связи, формирователь типа ретранслируемых сообщений соединен двухсторонними связями с шестым входом/выходом вычислителя АРМ, при этом седьмой вход/выход вычислителя АРМ является входом/выходом загрузки параметров.
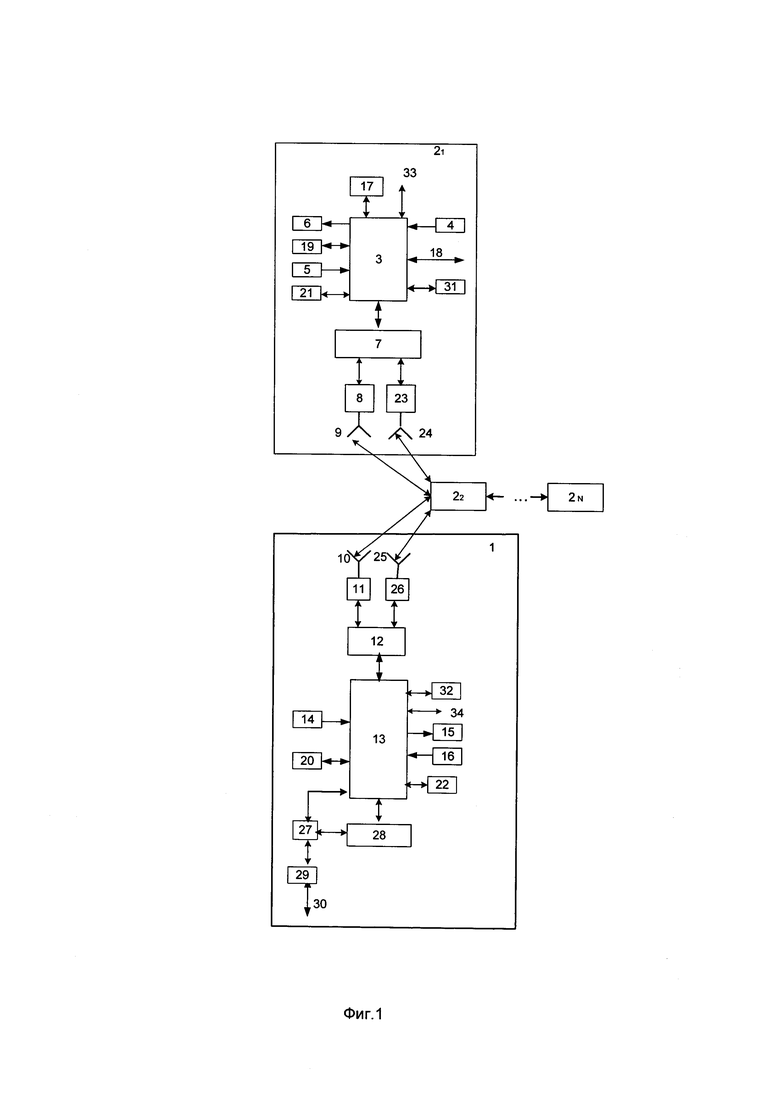
На фиг. 1 представлена структурная схема системы радиосвязи с подвижными объектами, где обозначено:
1 - наземный комплекс;
2 - подвижный объект, например, воздушное судно;
3 - бортовой вычислитель;
4 - бортовые датчики;
5 - бортовой приемник сигналов глобальных навигационных спутниковых систем;
6 - блок регистрации данных;
7 - бортовая аппаратура передачи данных;
8 - первая бортовая радиостанция;
9 - первая бортовая антенна;
10 - первая наземная антенна;
11 - первая наземная радиостанция;
12 - наземная аппаратура передачи данных;
13 - вычислитель автоматизированного рабочего места;
14 - наземный приемник сигналов глобальных навигационных спутниковых систем, например, ГЛОНАСС/GPS;
15 - монитор АРМ;
16 - пульт управления АРМ;
17 - блок анализа типа принимаемых сообщений;
18 - двунаправленная шина системы управления подвижным объектом, например, воздушным судном;
19 - бортовой формирователь типа ретранслируемых сообщений;
20 - наземный формирователь типа ретранслируемых сообщений;
21 - блок хранения характеристик ПО;
22 - блок хранения программ;
23 - вторая бортовая радиостанция;
24 - вторая бортовая антенна;
25 - вторая наземная антенна;
26 - вторая наземная радиостанция;
27 - вычислитель параметров по организации связи;
28 - блок отображения информации по организации связи;
29 - m подсистем передачи данных;
30 - входы/выходы наземного комплекса 1;
31 - бортовой модуль оценки дальности прямой видимости и отношения сигнал/шум;
32 - наземный модуль оценки дальности прямой видимости и отношения сигнал/шум;
33 - бортовой вход/выход загрузки параметров;
34 - наземный вход/выход загрузки параметров.
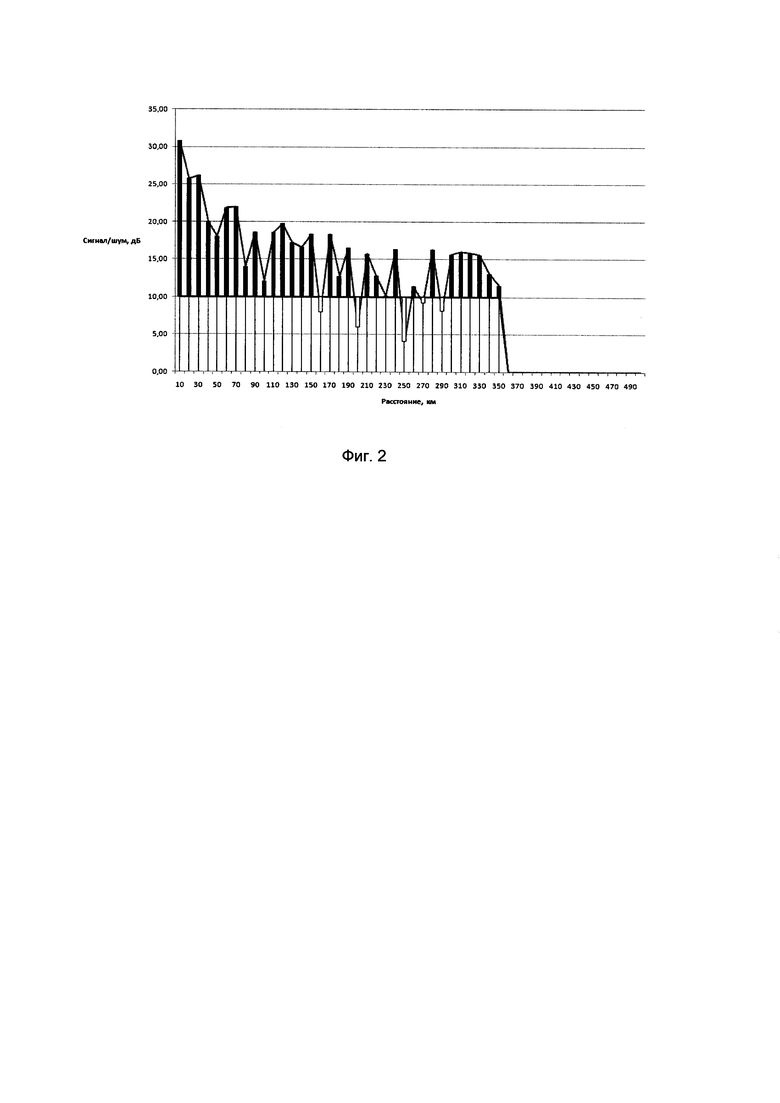
На фиг. 2 приведен один из вариантов отображения изменения отношения сигнал/шум на НК 1 в зависимости от дальности связи. Аналогичная картинка может быть выведена на экран блока 6 регистрации с помощью бортового вычислителя 3.
Алгоритм работы системы может быть, например, следующий. Абоненты системы: все ПО и НК постоянно для повышения надежности связи (обеспечения превышения отношения сигнал/шум выше заданного) ведут мониторинг радиочастотного спектра - для оценки наличия в воздухе ПО, их радиосигналов, помех и состояния окружающей среды - для оценки помеховой и метеорологической обстановки по предполагаемой трассе распространения радиоволн следующего сеанса связи. Надежность связи в метровом, дециметровом, сантиметровом, миллиметровом диапазонах определяется прямой (оптической) видимостью между абонентами и потерями мощности радиосигнала, которая зависит от рабочей частоты, используемой для передачи сообщений, высоты подъема над землей антенн абонентов при сеансе связи, а также от энергетических характеристик, в состав которых входят: длина волны выделенного диапазона, коэффициент усиления передающей антенны, коэффициент усиления приемной антенны, потери мощности радиосигнала в передающем тракте, потери мощности радиосигнала в приемном тракте, потери на трассе распространения радиоволн, шум-фактор приемного устройства, коэффициент усиления диаграммы направленности антенны в угломестной плоскости, множитель, характеризующий влияние отражений радиоволн от поверхности Земли на характеристики антенны, угол места нахождения одного абонента относительно антенны другого абонента. Собственные параметры НК 1 и ПО 2 измеряются и вводятся в них по входам/выходам 34 и 33 соответственно [6, 7]. Формы диаграммы направленности антенн НК 1 и ПО 2 в угломестной плоскости, множитель, характеризующий влияние отражений радиоволн от поверхности Земли на характеристики антенны, угол места нахождения одного абонента относительно антенны другого абонента рассчитываются в вычислителях 3 и 13 на основании известных формул [6, 7] и навигационных параметров, снимаемых с выходов приемников сигналов глобальных навигационных спутниковых систем 5 и 14 соответственно. Потери на трассе распространения радиоволн, характерные для высокочастотной части дециметрового, сантиметрового и миллиметрового диапазонов, рассчитываются в вычислителях 3 и 13 на основании известных формул [6, 7] и данных с бортовых датчиков 4, в том числе метеоинформации, и в вычислителе 27 параметров по организации связи, сведения которого передаются на все ПО 2, находящиеся в зоне связи вызывающего абонента. Критерием допустимой надежности связи является величина отношения сигнал/шум, превышающая допустимую. Если расчетная величина отношения сигнал/шум приближается к допустимой, то в вычислителях 3 или 13 вырабатывается сообщение предупреждения, которое передается на вычислитель удаленного абонента последовательно через узлы 12, 11 (26),10 (25), 9 (24), 8 (23), 7 или 7, 8 (23), 9 (24), 10 (25), 11 (26), 12. Для повышения надежности связи в этом случае абоненты должны увеличить высоту полета, а в НК 1 увеличить высоту подъема наземной антенны 10 (25), если это возможно или выйти из области с неблагоприятной помеховой или метеорологической обстановкой. В полете подвижный объект (условно №1) посылает информацию со своих бортовых датчиков 4 на НК 1 в его зоне связи. Сообщения принимаются первой (второй) наземной радиостанцией 11 (26) соответствующего диапазона. Если сообщение принято без ошибок, то вычислитель 13 АРМ обрабатывает навигационные параметры удаленного абонента, выделяет и передает данные на вход вычислителя 27 параметров по организации связи, в котором выполняются соответствующие процедуры, после чего данные вновь поступают вычислитель 13 АРМ, объединяются с расчетной диаграммой отношения сигнал/шум на момент сеанса связи (фиг. 2) и транслируются на блок 28 отображения информации по организации связи, расположенный рядом с монитором 15 АРМ диспетчера. Один из вариантов отображения информации на экране блока 28 отображения информации по организации связи между ПО 2 и НК 1 приведен на фиг. 2, где показаны участки, на которых ожидаются «обрывы» связи и при приближении к которым в вычислителях 3 и 13 будет вырабатываться соответствующий сигнал предупреждения.
При получении данных с датчиков 4 о метеоопасности, диспетчер вводит коррективы в маршруты движения других ПО 2, трассы которых проходят через область с опасными метеорологическими явлениями. Затем данная информация соответствующим образом кодируется и возвращается на борт ПО №1. Информация об области с неблагоприятной метеорологической обстановкой передается с ПО №1 на НК 1 постоянно, что позволяет отследить поведение этой области.
Используя получаемые данные, с ПО 2 в одном из режимов вычислитель 27 параметров по организации связи выводит текущую и прогнозируемую информацию (характер движения, оценку опасности и прочее) о неблагоприятном, с точки зрения надежности связи, участке на блок 28 отображения информации по организации связи и через m подсистем 29 передачи объединенных данных потребителям информации, в том числе и на соседние НК. Имея эти данные, диспетчер вносит коррективы в маршруты движения других ПО 2N для обхода неблагоприятной зоны и организации устойчивой связи. Это позволит смежным наземным комплексам 1 отследить характер изменения условий связи и своевременно скорректировать маршруты движения обслуживаемых ими ПО 2N.
Передача данных о параметрах бортовых радиосредств с блока 21 хранения характеристик ПО 2 на НК 1 по радиолинии, состоящей из последовательно соединенных первой (второй) бортовой радиостанции 8 (23), первой (второй) бортовых и наземных антенн 9 (24) и 10 (25), первой (второй) наземной радиостанции 11 (26), осуществляется до тех пор, пока ПО 2 не выйдет за пределы прямой видимости с НК 1 или отношение сигнал/шум не окажется ниже заданного, или не удается организовать с этим ПО 2 обмен данными через цепочку, состоящую из (N-1)-го ПО 2.
Во время движения ПО 2, находящиеся в пределах радиогоризонта (прямой видимости), обмениваются навигационными и метеорологическими данными (при наличии соответствующей команды о заключении контракта на время обслуживания с НК 1) между собой и соответствующим НК 1 по радиолинии связи (цепочка узлов 3, 7, 8 (23), 9 (24), 10 (25), 11 (26), 12, 13). Принимаемые первой (второй) наземной радиостанцией 11 (26) из канала «воздух-земля» сообщения через аппаратуру 12 передачи данных поступают в вычислитель 13 АРМ, который может быть выполнен, например, на базе серийной ПЭВМ. В нем в соответствии с принятым в системе протоколом обмена проводится идентификация принятого в сообщении адреса с адресами подвижных объектов 2, хранящимися в памяти вычислителя 13 АРМ. При совпадении адреса подвижного объекта 2 с хранящимся в списке адресом информация о местоположении, параметрах движения ПО 2N, (географические координаты, высота и скорость движения), энергетических характеристиках средств связи абонента, введенные по входам/выходам 33 или 34, и состоянии его датчиков 4, в том числе информация метеорологических датчиков ПО 2, запоминается в блоке 21 хранения характеристик ПО 2, а в НК 1 - в блоке 22 хранения программ. На основании этих сведений и других, полученных по m подсистемам 29 передачи данных от m источников (потребителей) информации, в том числе метеорологической, в наземном вычислителе 13 решаются задачи слежения за положением ПО 2, слежения за величиной отношения сигнал/шум в предполагаемых направлениях связи для обеспечения возможности организации надежной радиосвязи со всеми N ПО 2, находящимися в его зоне связи, хранения соответствующих координат абонентов и метеоданных. Сведения о точном местонахождении (широта, долгота, высота) и параметрах движения всех ПО 2 [8], показания их метеорологических датчиков с привязкой к глобальному времени и координатам абонента поступают в вычислитель 27 параметров по организации связи, в котором осуществляются известные операции [3, 4] обработки переданных с ПО 2 измерений основных параметров средств связи абонентов, участвующих в обмене данными. Сведения о поведении вихревых следов, областей опасных явлений в зонах ответственности НК 1, расположенных в районных и районно-аэродромных центрах, с помощью необходимых для функционирования прогнозирующих алгоритмов так же обрабатываются и на ПО 2 выдаются соответствующие команды на смену маршрута полета для повышения надежности связи и безопасности движения. Полученная информация отображается на отдельном блоке 28 отображения информации по организации связи, подключенному к вычислителю 13 АРМ, чтобы не мешать диспетчеру по отображаемой на экране монитора 17 АРМ НК 1 обстановке решать задачи обеспечения надежности связи и безопасности движения. Вывод данных на экраны монитора 15 АРМ и блока 28 отображения информации по организации связи в НК 1 осуществляется в виде, удобном для восприятия диспетчера. Обратные каналы в двухсторонних связях вычислителей 3 и 13 необходимы для приема данных контроля с соответствующих узлов системы. В системе для обеспечения надежности связи в контрактном режиме или по запросу осуществляется периодическая передача докладов на НК 1 в виде цифровых сообщений по маршруту движения от бортового вычислителя 3 и от бортовых датчиков 4 ПО 2 (в том числе метеоинформация и параметры движения). Предлагаемая система позволяет обеспечить сбор, обработку и отображение на блоках 28 отображения информации по организации связи следующих данных:
- отношения сигнал/шум в направлении на ПО 2, с которым предстоит сеанс связи;
- параметры движения и характеристики средств связи ПО 2 или НК 1, с которым предстоит сеанс связи;
- предупреждение (визуальное и звуковое) о возможном «обрыве» связи;
- подсказка решения конфликтной ситуации;
- действительные и прогнозируемые метеорологические условия, штормовое предупреждение, данные коррекции прогнозов, например, для главных и запасных аэродромов центра УВД, аэродромов посадки и международных аэродромов;
- прогноз направления ветра, наличие осадков и температуры воздуха, например, в слоях воздушного пространства, с соответствующих датчиков ПО 2 для зоны обслуживания НК 1, на маршруте и в аэродромной зоне;
- предупреждение об опасных метеорологических явлениях на маршруте и в зоне действия смежных НК 1.
При выходе за пределы радиогоризонта или приближении к границе зоны устойчивой радиосвязи хотя бы одного из ПО 2, находящегося в районе, в котором необходимо уточнить метеорологическую обстановку, программно с помощью соответствующих бортовых 3n и наземного 13 вычислителей определяется один из ПО 2, который назначается ретранслятором сообщений. При постоянном изменении дальности между подвижными объектами 2 и НК 1 в качестве ретранслятора в течение определенного времени может быть назначен любой из N ПО 2, местоположение которого известно и оптимально по отношению к НК 1 и остальным ПО 2, с которых требуется снять информацию. По анализу местоположения и параметров движения остальных ПО 2 определяются оптимальные пути доставки соответствующей команды удаленному от НК 1 за радиогоризонт ПО 2N. Команда от НК 1 через последовательную цепочку, состоящую из (N-1)-го ПО 2, может быть доставлена ПО 2N. Для этого на НК 1 в формирователе 20 типа ретранслируемых сообщений в заранее определенные разряды передаваемой кодограммы закладываются номер ПО 2, назначенного ретранслятором, и адреса подвижных объектов 2N, обеспечивающих заданный трафик сообщения. Принятые на ПО 2 сообщения обрабатываются в блоке 17 анализа типа принимаемых сообщений. Если сообщение достоверно и предназначено для данного ПО 2, то после анализа решается вопрос о направлении данных на блок 21 хранения характеристик ПО для съема с него данных выбранного для связи абонента, показаний метеорологических датчиков с привязкой ко времени, координатам и номеру ПО 2, а так же решается вопрос о направлении сообщения по двунаправленной шине 18 на систему управления ПО 2, не указанную на фиг. 1, или в режиме ретрансляции - о передаче их на соседний ПО 2N. Для исключения коллизий минимизируется число разрядов в передаваемом сообщении и осуществляется ретрансляция данных последовательно во времени. При обмене данными по линии «диспетчер-пилот», особенно при наличии потенциально конфликтной ситуации, экипаж должен выполнять команды диспетчера НК 1, имеющего больший объем информации в своей зоне ответственности. Для этого с НК 1 диспетчером посылается на ПО 2 соответствующее сообщение (команда), которое отображается на экране бортового блока 6 регистрации данных в виде понятной экипажу отметки или формуляра. На основании принятых с НК 1 данных в бортовом вычислителе 3 ПО 2 и в наземном вычислителе 13 решается задача обеспечения надежности связи и опасных сближений с соседними ПО 2 и опасными атмосферными явлениями с учетом их прогнозируемых положений и возможных маневров, помех для процесса организации связи, определяется время следующих сеансов связи с получателями информации по входам/выходам 30 НК 1. По отображаемой на экране бортового блока 6 регистрации данных экипажем ПО 2 при согласии диспетчера НК 1 определяются время сеансов связи, параметры дальнейшего движения и действия по уточнению текущей обстановки.
Тенденции движения соседних ПО 2 при необходимости могут быть отображены на экране собственного бортового блока 6 регистрации данных, на экране монитора 15 АРМ - всех ПО 2 в зоне связи НК 1 с помощью формируемых вычислителями 3, 13 отметок, характеризующих предыдущее местоположение ПО 2, а на экране блока 28 обеспечивается отображение информации по организации связи в соответствующей обстановке, формируемой вычислителем 27 параметров по организации связи. По мере движения ПО 2 устаревающие отметки о местоположении [9] выбранного для связи ПО 2 и возможности связи с ним стираются (фиг. 2) и обновляются, а метеорологическая картинка, привязанная к электронной карте местности, ввиду меньшей подверженности изменениям дополняется новыми данными с датчиков ПО 2 и наземных источников метеоданных, поступающих по m подсистемам передачи данных. Выдача необходимых данных, например, в виде системной таблицы или карты метеопрогноза, с НК 1 наземным получателям метеоинформации осуществляется с блока 22 хранения программ через последовательно соединенные вычислитель 13, вычислитель 27 параметров по организации связи, подсистемы 29 передачи данных и через соответствующие входы/выходы 30.
Принимаемая на ПО 2N информация отображается на экране бортового блока 6 регистрации данных в виде буквенно-цифровых символов или в виде точек и векторов. Автоматическая передача с НК 1 информации о погодных условиях осуществляется с целью предоставления экипажу текущей обстановки, обеспечивающей, например, бесконфликтное самолетовождение с отображением планов полета и связи на блоке 6 регистрации данных на фоне движущейся электронной карты местности. Отображение опасных метеоявлений и зон с отсутствием связи по трассе движения в виде цветных границ областей на экране блока 6 регистрации данных осуществляется с учетом тенденции его движения. Цвет выделенной границы области соответствует степени угрозы ПО 2. Наличие данных от различных абонентов и источников информации позволяет в вычислителе 27 параметров по организации связи и вычислителях 3 и 13 провести автоматический расчет зон устойчивой связи для отображения планируемых сеансов связи и пространственно-временных траекторий движения ПО 2. Для предсказания обстановки в зоне связи НК 1 организуется автоматический обмен данными между смежными наземными комплексами 1.
В вычислителях 3, 13 и 27 определяется время «старения» информации, и, если сообщение в течение определенного промежутка времени не было передано в канал связи, то оно обновляется. В вычислителе 27 параметров по организации связи решаются задачи:
- расчет отношения сигнал/шум в направлении абонента, выбранного для связи;
- формирование и обновление картинки изменения отношения сигнал/шум в направлении абонента, выбранного для связи;
- обновление данных, поступающих с других ПО 2 и НК 1;
- формирование совместно с вычислителем 13 АРМ предупреждения о предстоящем «обрыве» связи и необходимых действиях по его предотвращению;
- пересчет к единой системе координат системы управления движением объединенных контуров зон, «обрывов» связи и опасных метеорологических явлений с прогнозом их перемещения;
- обработка текущей метеоинформации с бортовых датчиков 4 и других источников метеоданных;
- учет зон и прогноза перемещения опасных явлений погоды (гроза, болтанка, обледенение, турбулентность при ясном небе, вертикальный сдвиг ветра) на основе прогностических данных внешних источников метеоинформации;
- формирование штормовых оповещений для потребителей метеоинформации;
- предоставления данных о фактической и прогнозируемой погоде, например, по основным и запасным аэродромам;
- предотвращения опасных ситуаций, связанных с попаданием ПО 2 (например, самолетов) в зоны турбулентности и спутные следы, их столкновений с генераторами вихревых следов и землей путем индикации соответствующей информации на информационно-управляющем поле монитора 15 АРМ диспетчера;
- предупреждения экипажей ПО 2 и соответствующих потребителей информации путем передачи соответствующих данных;
- непрерывной коррекции прогнозов по связи и погоде.
Бортовыми датчиками 4 при движении ПО 2 постоянно осуществляется измерение основных атмосферных параметров, в том числе влияющих на формирование вихревых следов и функционирование прогнозирующих алгоритмов в зонах ответственности НК 1, а именно:
- трех составляющих вектора скорости ветра;
- давления;
- температуры;
- турбулентности атмосферы;
- пространственных координат осей вихревых жгутов;
- скорости циркуляции вихревых жгутов.
При прогнозировании учитываются следующие параметры каждого ПО 2:
- параметры средств радиосвязи;
- ограничения по предельным возможностям полета;
- координаты центра масс ПО 2 в инерциальной системе координат;
- проекции скорости ПО 2 относительно Земли в инерциальной системе координат;
- углы атаки и скольжения, например, для воздушных судов;
- проекции угловой скорости в связанной с ПО 2 системе координат;
- углы отклонения органов управления и механизации, например, крыла;
- масса ПО 2.
В обычном режиме с НК 1, когда не требуется ретрансляция сигналов, осуществляется адресный запрос метеоданных в контрактном режиме с блока 21 хранения характеристик ПО 2 путем формирования сообщения для передачи в канал радиосвязи в соответствии с протоколом обмена. Набираемое диспетчером с пульта 16 управления АРМ сообщение отображается на мониторе 15 АРМ и после прохождения сигнала на НК 1 через вычислитель 13, аппаратуру 12 передачи данных, первую (вторую) наземную радиостанцию 11 (26), первую (вторую) наземную антенну 10 (25) и на ПО 2 - через бортовые первую (вторую) антенну 9 (24), первую (вторую) радиостанцию 8 (23), бортовую аппаратуру 7 передачи данных поступает в бортовой вычислитель 3, где происходит идентификация принятого в сообщении адреса с адресом ПО 2. Далее сообщение передается в блок 17 анализа типа ретранслируемого сообщения для дешифрации полученного заголовка (служебной части) сообщения и определения режима работы аппаратуры ПО 2. Информационная часть сообщения записывается в память бортового вычислителя 3 и при необходимости выводится на экран блока 6 регистрации данных, который может быть выполнен, например, в виде монитора или другого устройства отображения.
При использовании определенного формата заголовка сообщения с выхода бортовых формирователей 19 типа ретранслируемых сообщений может быть использован режим свободного доступа со стороны других ПО 2 или режим выделения временного интервала для организации обмена данными с НК 1.
Для того, чтобы избежать столкновений в радиоканале связи при одновременной передаче сообщений несколькими объектами, в вычислителях 3 и 13 может осуществляться, например, контроль несущей при воздействии на радиостанции 8 и 11, 23 и 26 преамбулы или заголовка (служебной части сообщений). В этом случае подготовленное сообщение с ПО 2 передается только тогда, когда радиоканал свободен. Для того, чтобы разнести во времени моменты выхода на связь подвижных объектов при обнаружении, что радиоканал занят, в вычислителях 3 и 13 может быть сформирована, например, псевдослучайная задержка передачи сообщений от подвижных объектов 2 - для каждого ПО 2 своя.
В режиме адресного опроса ПО 2 инициатором связи может быть только НК 1. Если подвижные объекты 2 сформировали для передачи сообщения и обнаружили, что радиоканал свободен, то они информируют остальные подвижные объекты 2 о начале цикла передачи данных, в том числе о своем местоположении, следующем сеансе связи, и случайным образом или в выделенных им временных слотах передают сообщения. В каждом из ПО 2 время окончания сигнала несущей частоты в радиоканале и импульсы синхронизации бортового приемника 5 сигналов глобальных навигационных спутниковых систем, например, ГЛОНАСС/GPS используются в бортовом вычислителе 3 для расчета интервала времени собственной передачи и при его начале в ПО 2 осуществляется передача собственного пакета данных.
Сообщения о местоположении ПО 2 и параметрах его движения с выходов приемников 5 и 14 сигналов глобальных навигационных спутниковых систем, например, ГЛОНАСС/GPS записываются в память вычислителей 3 и 13 с привязкой к глобальному времени. Точная синхронизация слотов, используемых для обмена данными между абонентами системы, и их запланированный интервал времени передачи известен каждому абоненту по отношению к окружающим абонентам с известными координатами. Распределение слотов между ПО 2 и НК 1 осуществляется в вычислителях 3 и 13 с использованием координат объектов. Чем дальше находится ПО 2 от зоны интенсивного движения или области опасного атмосферного явления, тем меньше ему отводится слотов для передачи данных. Такая информация позволяет каждому НК 1 организовать высокоэффективное использование радиоканалов связи, повысить надежность связи и безопасность движения независимо от окружающей обстановки.
В вычислителях 3 и 13 эти данные используются для расчета навигационных характеристик и параметров движения каждого ПО 2N. При наличии соответствующего запроса в зависимости от выбранного интервала времени выдачи на НК 1 сообщений о местоположении и информации с метеодатчиков ПО 2 в бортовом вычислителе 3 в заданное время формируется соответствующее сообщение с привязкой к глобальному времени проведения измерения координат и показаний датчиков ПО 2. Это время используется также в вычислителе 13 АРМ для известной операции построения экстраполяционных отметок от ПО 2 [2, 9]. В бортовой 7 и наземной 12 аппаратурах передачи данных осуществляются известные операции: модуляции и демодуляции, кодирования и декодирования, сопряжения с узлами 3, 8, 23 - на ПО 2 и с узлами 13, 11, 26 - на НК 1 и другие.
В вычислителях 3 и 13 хранятся предварительно заложенные таблицы с наборами назначенных НК 1 и ПО 2 частот. НК 1 периодически излучает сигналы управления/синхронизации/связи на всех назначенных ему частотах. Для установления линии связи с НК 1 в бортовом вычислителе 3 ПО 2 автоматически анализируются принимаемые сигналы управления/синхронизации/связи от НК 1 на всех частотах и выбираются лучшие частоты, например, по отношению сигнал/помеха или величине мощности принимаемого сигнала. По измеренному отношению сигнал/помеха в бортовом вычислителе 3 ПО 2 выбирается рабочая частота и скорость передачи данных, а также вид модуляции и кодирования. Оценка отношения сигнал/помеха осуществляется наземным комплексом 1 и всеми ПО 2 каждый раз при приеме информационного сообщения или сигнала управления/синхронизации/связи. Эта величина сообщается на противоположную сторону в виде рекомендуемой скорости передачи данных.В бортовой 7 и наземной 12 аппаратурах передачи данных при работе с радиостанциями 8, 11, 23 и 26 могут быть использованы известные алгоритмы, например, высокоскоростных адаптивных модемов. Для повышения достоверности приема информации может быть использован помехоустойчивый код, например, циклический.
Таким образом, каждый из ПО 2 может обеспечить надежную связь как с удаленным ПО 2, так и с НК 1, и при запросе передавать данные на двух рабочих частотах, известных всем участникам движения. Составленный канал связи между источником ПО 2 и потребителями информации с НК 1, как правило, будет включать блок 22 хранения программ, в том числе сведений о характеристиках собственных средств связи, данных об отношении сигнал/шум в направлении на выбранный для связи ПО 2, карт метеопрогноза, и m подсистем 29 передачи данных. На момент подачи заявки разработаны алгоритмы функционирования и фрагмент программного обеспечения заявляемой системы радиосвязи. Узлы 1-30 аналогичные с узлами прототипа. Вводимые узлы 31, 32 могут быть выполнены программно, а узел 28 - на серийных мониторах.
В одном из вариантов построения системы (при беспилотных ПО) узел 6 может отсутствовать.
Использование системы радиосвязи с подвижными объектами при наличии на каждом ПО 2 оборудования двух радиоканалов, работающих на разных частотах, позволяет увеличить надежность связи. Оперативность организации связи за счет расчета отношения сигнал/шум и постоянное обновление этих данных позволяет повысить достоверность обмена данными.
Литература:
1. В.В. Бочкарев, Г.А. Крыжановский, Н.Н. Сухих. «Автоматизированное управление движением авиационного транспорта», М., Изд-во «Транспорт», 1999.
2. Б.И. Кузьмин. Сети и системы цифровой электросвязи, часть 1 «Концепция» ИКАО CNS/ATM. Москва Санкт-Петербург: ОАО «НИИЭР», 1999, 206 с.
3. Метеорология, методы и средства наблюдений. Л.: Гидрометеоиздат, 1984.
4. Патент РФ на полезную модель №44907, дата публикации 27.03.2005 Бюл. №9.
5. Патент РФ на полезную модель №58276, дата публикации 10.11.2006 Бюл. №31 (прототип).
6. А.В. Кейстович, А.В. Комяков. Системы и техника радиосвязи в авиации: учеб. пособие. - Нижний Новгород: НГТУ, 2012. - 236 с.
7. Б.И. Кузьмин. Сети и системы цифровой электросвязи, часть 3 «Авиационная электросвязь в условиях реализации «Концепции ИКАО - ИАТА CNS/АТМ» в Российской Федерации. Москва Санкт-Петербург: ОАО «НИИЭР», 2003, 480 с.
8. GPS - глобальная система позиционирования. - М.: ПРИН, 1994, 76 с.
9. Д.С. Конторов, Ю.С. Голубев-Новожилов. Введение в радиолокационную системотехнику. - М.; Сов. Радио. 1971, 367 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА РАДИОСВЯЗИ С ПОДВИЖНЫМИ ОБЪЕКТАМИ | 2022 |
|
RU2793150C1 |
| СИСТЕМА РАДИОСВЯЗИ С ПОДВИЖНЫМИ ОБЪЕКТАМИ | 2012 |
|
RU2516704C2 |
| СИСТЕМА РАДИОСВЯЗИ С ПОДВИЖНЫМИ ОБЪЕКТАМИ | 2013 |
|
RU2535922C1 |
| СИСТЕМА РАДИОСВЯЗИ С ПОДВИЖНЫМИ ОБЪЕКТАМИ | 2018 |
|
RU2688199C1 |
| СИСТЕМА РАДИОСВЯЗИ С ПОДВИЖНЫМИ ОБЪЕКТАМИ | 2012 |
|
RU2572521C2 |
| СИСТЕМА РАДИОСВЯЗИ С ПОДВИЖНЫМИ ОБЪЕКТАМИ | 2022 |
|
RU2791262C1 |
| СИСТЕМА РАДИОСВЯЗИ С ПОДВИЖНЫМИ ОБЪЕКТАМИ | 2010 |
|
RU2427078C1 |
| СИСТЕМА РАДИОСВЯЗИ С ПОДВИЖНЫМИ ОБЪЕКТАМИ | 2017 |
|
RU2643182C1 |
| СИСТЕМА РАДИОСВЯЗИ С БЕСПИЛОТНЫМИ ЛЕТАТЕЛЬНЫМИ АППАРАТАМИ | 2024 |
|
RU2839424C1 |
| СИСТЕМА РАДИОСВЯЗИ С ПОДВИЖНЫМИ ОБЪЕКТАМИ | 2018 |
|
RU2690494C1 |
Изобретение относится к системам радиосвязи с подвижными объектами и может быть использовано для обмена данными через наземные комплексы с оборудованием подвижных объектов, в частности воздушных судов, и получателями информации системы управления воздушным движением. Технический результат состоит в повышении надежности связи, а именно формировании сигналов предупреждения о предстоящем «обрыве» связи из-за потери прямой видимости и уменьшения отношения сигнал/шум на выходе приемного устройства в результате влияния отражения радиоволн от поверхности Земли, а также защите от этих процессов. Для этого передают сформированные сигналы абонентам, участвующим в сеансе связи, для оперативного изменения параметров движения ПО, с целью предупреждения «обрыва» связи. На подвижном объекте вводят бортовой модуль оценки дальности прямой видимости и отношения сигнал/шум, а в наземном комплексе вводят наземный модуль оценки дальности прямой видимости и отношения сигнал/шум, вычислитель параметров по организации связи, блок отображения информации по организации связи. 2 ил.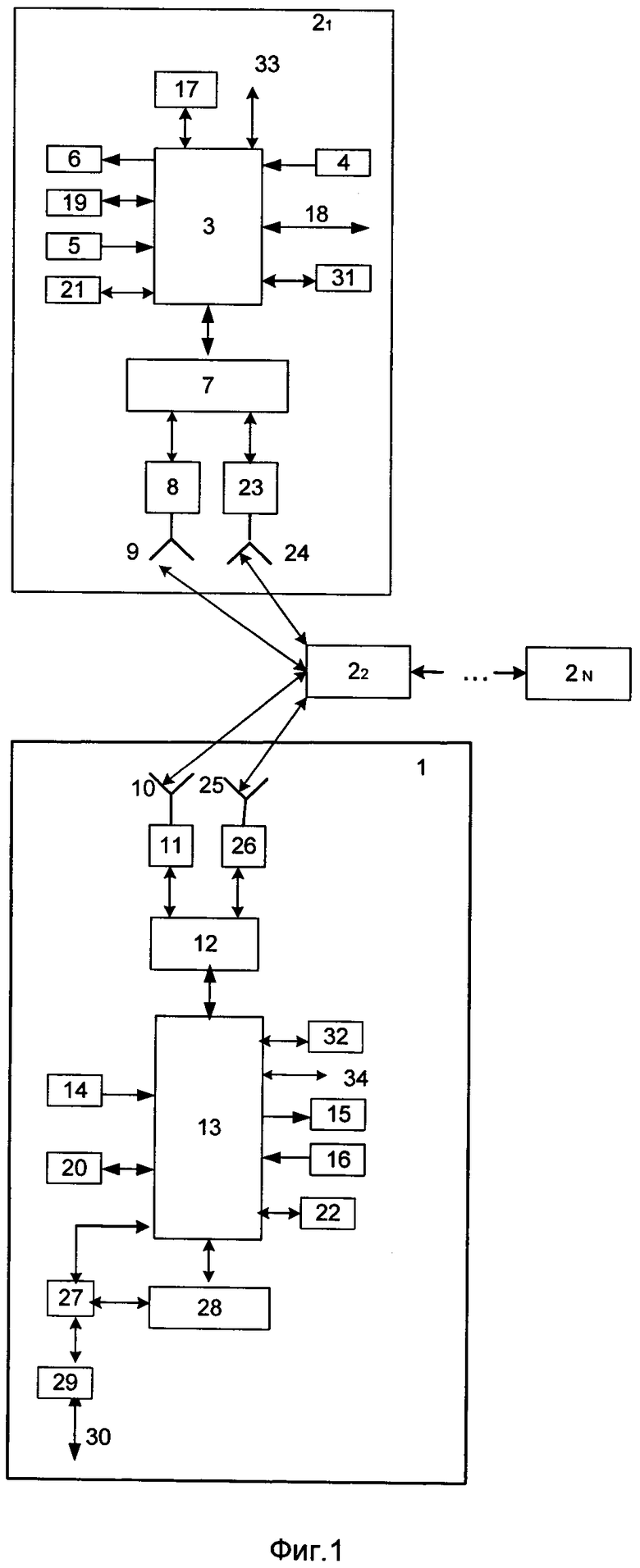
Система радиосвязи с подвижными объектами, состоящая из наземного комплекса (НК), содержащего наземный формирователь типа ретранслируемых сообщений, первую наземную антенну, соединенную с первой наземной радиостанцией, подключенной двухсторонними связями через аппаратуру передачи данных к первому входу/выходу вычислителя автоматизированного рабочего места (АРМ), первый вход которого подключен к наземному приемнику сигналов глобальных навигационных спутниковых систем, второй вход - к пульту управления АРМ, а выход - к монитору АРМ, вторая наземная антенна соединена с второй наземной радиостанцией, вход/выход которой подключен двухсторонней связью к соответствующему входу/выходу наземной аппаратуры передачи данных, блок хранения программ, вход/выход которого подключен двухсторонними связями к второму входу/выходу вычислителя АРМ, входы/выходы m подсистем передачи данных являются входами/выходами наземного комплекса, где m - общее число потребителей и источников информации, N подвижных объектов (ПО), в состав каждого из которых входят бортовые датчики, бортовой приемник сигналов глобальных навигационных спутниковых систем, каждый из которых соединен с соответствующим входом бортового вычислителя, выход которого соединен с входом блока регистрации данных, первый вход/выход бортового вычислителя подключен к двунаправленной шине системы управления ПО, а второй вход/выход через последовательно соединенные двухсторонними связями бортовую аппаратуру передачи данных, первую бортовую радиостанцию подключен к первой бортовой антенне, блок анализа типа принимаемых сообщений, бортовой формирователь типа ретранслируемых сообщений, блок хранения характеристик ПО, вход/выход которого подключен двухсторонними связями к третьему входу/выходу бортового вычислителя, вторая бортовая антенна соединена с второй бортовой радиостанцией, вход/выход которой подключен к соответствующему входу/выходу бортовой аппаратуры передачи данных, причем передача данных с наземного комплекса обеспечивается по цепочке последовательно соединенных первого ПО, второго ПО и далее до N-го ПО, а передача данных с N-го ПО на НК осуществляется в обратном порядке, отличающаяся тем, что дополнительно введены на ПО бортовой модуль оценки дальности прямой видимости и отношения сигнал/шум, подключенный двухсторонними связями к четвертому входу/выходу бортового вычислителя, пятый вход/выход бортового вычислителя соединен с бортовым формирователем типа ретранслируемых сообщений, шестой вход/выход - с блоком анализа типа принимаемых сообщений, при этом седьмой вход/выход бортового вычислителя является входом/выходом загрузки параметров, а в НК дополнительно введены наземный модуль оценки дальности прямой видимости и отношения сигнал/шум, подключенный двухсторонними связями к третьему входу/выходу вычислителя АРМ, блоку отображения информации по организации связи, подключенный к четвертому входу/выходу вычислителя АРМ, вычислитель параметров по организации связи, первый вход/выход которого подключен к пятому входу/выходу вычислителя АРМ, а второй вход/выход - к m подсистемам передачи данных, а третий вход/выход - к блоку отображения информации по организации связи, формирователь типа ретранслируемых сообщений соединен двухсторонними связями с шестым входом/выходом вычислителя АРМ, при этом седьмой вход/выход вычислителя АРМ является входом/выходом загрузки параметров, при этом бортовые вычислители ПО и вычислитель АРМ выполнены на базе серийной ПЭВМ с возможностью обработки и хранения навигационных параметров удаленных ПО, слежения за удаленными ПО и формирования для них сообщений предупреждения столкновений и назначения одного из удаленных ПО ретранслятором сообщений.
| СИСТЕМА РАДИОСВЯЗИ С ПОДВИЖНЫМИ ОБЪЕКТАМИ | 2013 |
|
RU2535922C1 |
| СИСТЕМА РАДИОСВЯЗИ С ПОДВИЖНЫМИ ОБЪЕКТАМИ | 2012 |
|
RU2505929C1 |
| ЦЕНТРАЛЬНАЯ СТАНЦИЯ СИСТЕМЫ РАДИОСВЯЗИ С ПОДВИЖНЫМИ ОБЪЕКТАМИ | 2005 |
|
RU2308175C2 |
| УСТРОЙСТВО ДЛЯ ОБРАЗОВАНИЯ НАПРАВЛЕННЫХ ТРЕЩИН В СКВАЖИНАХ (ВАРИАНТЫ) | 2004 |
|
RU2272133C1 |
| US 5450329 A, 12.09.1995 | |||
| Станок для изготовления деревянных ниточных катушек из цилиндрических, снабженных осевым отверстием, заготовок | 1923 |
|
SU2008A1 |
| US 5669062 A, 16.09.1997. | |||

