Изобретение относится к области подводной техники, конкретно к подводным/подледным роботизированным комплексам для проведения технических, в том числе и аварийно-спасательных работ по освоению Мирового океана.
Сегодня такие работы являются национально приоритетными и выполняются в рамках нескольких федеральных программ.
Прежде всего речь идет о срочной доставке грузов, водолазов и обслуживающего персонала как к уже функционирующим подводным платформам различного назначения, так и к спешно формируемым например аварийно-спасательным комплексам оборудования, которое монтируется и используется определенным контингентом специалистов.
Так, известны составы спасательного снаряжения, доставляемого к аварийному надводному средству или обеспечивающего перемещение людей и малоразмерных грузов над морем (См. книгу: Караев Р.Н., Портной А.С., Разуваев В.Н. Суда и плавучие технические средства для освоения морских нефтегазовых месторождений - СПб: НИЦ «МОРИНТЕХ», 2009, рисунки на странице 105 и 309). В частности капсула «Frog», обеспечивающая минимализацию риска и исключающая неудобства и страх перемещающихся людей, представляет собой высокопрочный плавучий корпус, изготовленный из огнестойкого стеклопластика высотой 2.7 м с шириной каждой грани у основания около 3 метров. Однако, такие устройства разработаны только для надводных средств и не предусматривают их применение под водой.
Особый интерес и актуальность имеют устройства, способные работать в условиях сплошного ледового покрытия акватории.
Известно изобретение по патенту РФ №2681479, 2019 на «Подводный объект с транспортным модулем для внешней передачи людей и грузов»
Устройство включает в себя корпус (прочную капсулу) модуля с изолированной от забортной среды газовой полостью и имеет в нижней его части замкнутую по контуру посадочную поверхность, взаимодействующую с ответной посадочной поверхностью комингс-площадки подводного объекта, совместно образующие герметичную шлюзовую камеру. Герметичная шлюзовая камера люками взаимосвязывает газовую полость модуля с внутренним объемом подводного объекта с помощью системы реализации шлюзовых операций. Транспортный модуль снабжен балластными цистернами, системой создания и управления положительной/отрицательной плавучестью модуля, люком в верхней его части, ловителями, закрепленными на корпусе модуля внутри замкнутого контура его посадочной поверхности, взаимодействующими с ответными гнездами подводного объекта, имеющими сквозные отверстия, а ловители связаны с расположенными на подводном объекте дистанционно управляемыми лебедками кабель-тросами, проходящими через сквозные отверстия ответных гнезд ловителей. Достигается повышение надежности и готовности к функционированию в условиях плохой метеообстановкии при наличии течения.
Модуль прототип при всплытии, например, в полынье имеет безадресное в ней положение. Этим предопределяются дополнительные действия принимающей стороны по причаливанию, швартовке, перезагрузке и подготовке к возращению модуля на подводный объект, на что в условиях плохой погоды может потребоваться существенное время.
Техническими задачами предлагаемого решения является качественное сокращение времени на выполнение транспортных операций и расширение функциональных возможностей модуля.
Поставленные цели достигаются тем, что многофункциональный модуль включает прочную капсулу с верхним и нижним днищами и изолированной от внешней среды газовой полостью. В верхнее днище врезан входной люк, в нижнем расположен люк входа/выхода в шлюзовую камеру, на нижнем днище закреплены комингс-площадка и полые ловители, через которые пропущены силовые тросы принудительного вертикального перемещения модуля с помощью синхронизировано работающих лебедок, модуль снабжен балластными цистернами системой управления его плавучестью, станцией воздуха высокого давления, системой информационной связи с Центром управления работами и посадочной комингс - площадкой.
Транспортный модуль отличается тем, что на нижнем днище соосно с входным люком расположена шлюзовая камера, силовые тросы взаимодействуют с расположенными на модуле управляемыми лебедками, нижние концы тросов снабжены крепежными узлами с подводным объектом, верхние концы имеют размещенный в барабанах запас длины, а расстояние между ними определяется траверсой, имеющей крепежные приспособления к надводному объекту.
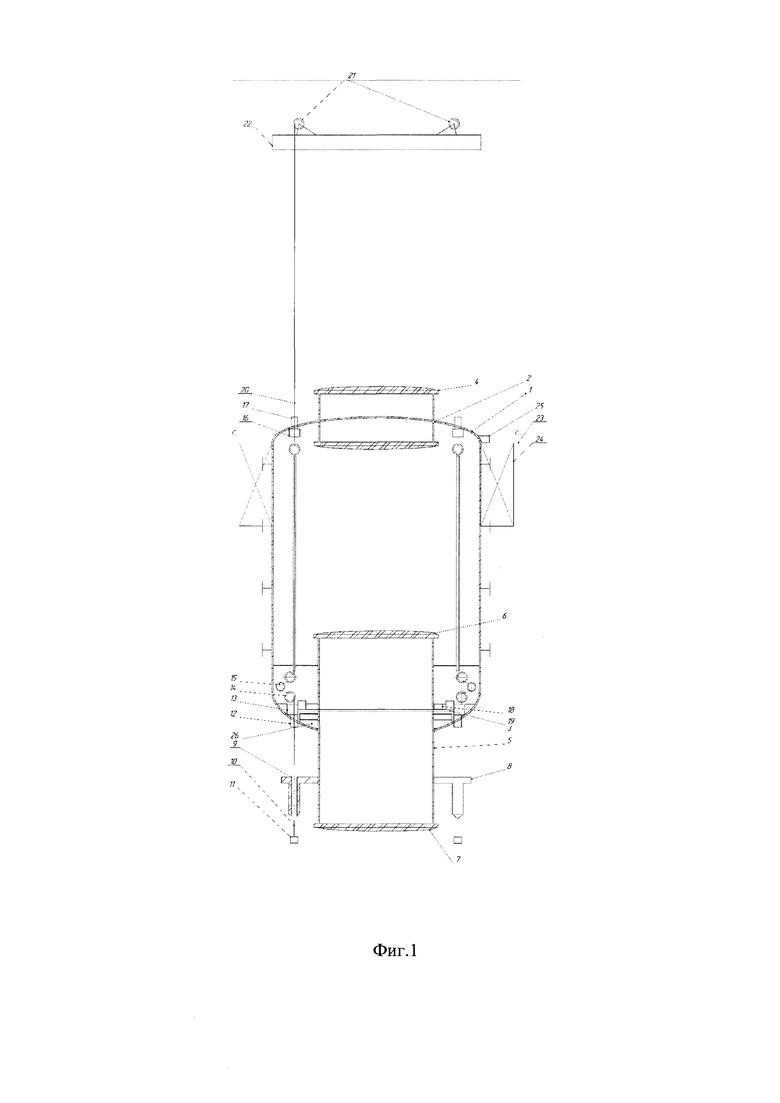
Сущность настоящей полезной модели изображена на фигуре 1, где показан в сечении общий вид модуля.
Многофункциональный модуль оперативной транспортной взаимосвязи подводного/подледного и надводного объектов содержит прочную капсулу 1 с верхним 2 и нижним 3 днищами. В верхнем днище соосно с продольной осью капсулы предусмотрен входной люк 4, на нижнем днище закреплена шлюзовая камера 5 с люками 6 и 7, комингс - площадкой 8, согласованная по взаимодействующим элементам с подводным объектом и оснащенная полыми ловителями 9, через которые пропущены силовые тросы 10, заканчивающиеся крепежными узлами 11 к подводному объекту.
С другой стороны от ловителей 9 силовые тросы 10 через уплотнительные узлы 12 введены в прочную капсулу 1 и, минуя водосбоники13 возможных протечек забортной воды, взаимодействуют с управляемыми лебедками 14, в общем случае имеющими натяжные приспособления 15, выходят наружу из капсулы 1, минуя водосборники 16 и уплотнительные узлы 17. Лебедки 14 оснащены электроприводами 18 механически связаны синхронизирующими устройствами 19. Выводные из капсулы концы 20 силовых тросов 10 с резервом длины параллельно закреплены в барабанах 21, установленных на траверсе 22, имеющей крепежные не показанные приспособления, согласованные с отвесными силовыми элементами надводного объекта. По требованию силовые тросы 10 с лебедками 14 могут располагаться вне прочной капсулы 1, а их электроприводы 19 с не показанной на фиг. 1 аппаратурой управления могут размещаться внутри капсулы.
На фиг. 1. дополнительно обозначено:
23 - посадочная со швартовными устройствами площадка;
24 - балластные цистерны;
25 - блок системы информационной связи с Центром управления подводно-техническими работами.
26 - аккумуляторная батарея
Многофункциональный модуль работает следующим образом. В качестве подводного объекта может выступать спасательный подводный аппарат, декомпрессионная камера или грузовая площадка. Траверса 22 закрепляется на обеспечивающем работу модуля, судне, специальном плавучем блоке или, в простейшем случае, на грузовой балке в палатке над полыньей во льду.
Имеющая положительную плавучесть прочная капсула 1 располагается на воде так, чтобы при открытом входном люке 4 посадочная площадка 23 находилась над поверхностью воды для осуществления посадки (высадки) людей во внутрь прочной капсулы. Допускается возможность передачи непосредственно в шлюзовую камеру 5 различных грузов с помощью внешних грузо-подьемных устройств при открытых люках 4 и 6.
После герметизации капсулы 1 с помощью, не показанной на фиг. 1 системы управления плавучестью производится балластировка модуля с достижением такой положительной плавучести, чтобы обеспечивалась возможность нахождения на верхнем днище 2 одного-двух провожающих лиц.
Синхронной работой обеих управляемых лебедок 14 производится погружение капсулы и вертикальное ее заглубление до требуемой глубины: либо до соприкосновения комингс-площадки 8 с посадочной комингс-площадкой подводного объекта, либо до доставки водолазов-работников на грузовую площадку, на которой закрепляется узлы 11.
При проведении аварийно-спасательной операции с использованием модернизированного спасательного аппарата, который оснащен согласующейся с многофункциональным модулем комингс-площадкой с гнездами под ловители 9, перед его погружением к гнездам под ловители устанавливают крепежные узлы 11, что обуславливает возможность подсоединения к прочной капсуле 1 на заданной глубине и работу шлюзовой камеры 5 в режиме сквозного прохода: спасательный аппарат-капсула 1.
Энергопотребление устройств транспортного модуля обеспечивается аккумуляторной батареей 26.
Таким образом, предлагаемый многофункциональный модуль может быть включен в технологическую цепочку транспортной связи(в том числе с целью быстрой доставки грузов) подводного/подледного и надводного объектов.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПОДВОДНЫЙ ОБЪЕКТ С ТРАНСПОРТНЫМ МОДУЛЕМ ДЛЯ ВНЕШНЕЙ ПЕРЕДАЧИ ЛЮДЕЙ И ГРУЗОВ | 2017 |
|
RU2681479C1 |
| ГРУЗОВОЙ ТЕРМИНАЛ ДОБЫЧНОГО КОМПЛЕКСА ПОДВОДНЫХ РОССЫПНЫХ МЕСТОРОЖДЕНИЙ | 2022 |
|
RU2789136C1 |
| СИСТЕМА КОЛЛЕКТИВНОГО СПАСЕНИЯ ЭКИПАЖА С ПЛ-ТАНКЕРА В АВАРИЙНОМ ПОЛОЖЕНИИ ПРИ ЗНАЧИТЕЛЬНЫХ КРЕНЕ И ДИФФЕРЕНТЕ | 2000 |
|
RU2174088C1 |
| ПОДВОДНО-СПАСАТЕЛЬНЫЙ КОМПЛЕКС С ВЛОЖЕННЫМИ МНОГОФУНКЦИОНАЛЬНЫМИ КАПСУЛАМИ | 2012 |
|
RU2474511C1 |
| Самоходный телеуправляемый спасательный колокол | 2017 |
|
RU2679381C1 |
| Спасательная подводная лодка - носитель глубоководных аппаратов | 2016 |
|
RU2690327C2 |
| БЫСТРОХОДНОЕ СПАСАТЕЛЬНОЕ СУДНО | 2023 |
|
RU2798921C1 |
| ПОДВОДНЫЙ МОДУЛЬ ДЛЯ ПРОИЗВОДСТВА ЭЛЕКТРИЧЕСКОЙ ЭНЕРГИИ | 2016 |
|
RU2608843C1 |
| ВСПЛЫВАЮЩАЯ СПАСАТЕЛЬНАЯ КАМЕРА | 2019 |
|
RU2735453C1 |
| Водолазно-спасательный глубоководный аппарат | 2020 |
|
RU2764140C1 |
Изобретение относится к области подводной техники, а именно к подводным/подледным роботизированным комплексам для проведения технических, в том числе и аварийно-спасательных работ. Многофункциональный модуль оперативной транспортной взаимосвязи подводного/подледного и надводного объектов включает прочную капсулу с верхним и нижним днищами и изолированной от забортной среды газовой полостью, в верхнем днище вырезан входной люк, в нижнем расположен люк входа/выхода в шлюзовую камеру, на наружной стороне нижнего днища закреплены комингс-площадка и полые ловители, через которые пропущены силовые тросы принудительного вертикального перемещения модуля с помощью синхронно работающих управляемых лебедок: модуль снабжен балластными цистернами системы управления его плавучестью, станцией воздуха высокого давления, системой информационной связи с центром управления работой и посадочной площадкой. На нижнем днище соосно с входным люком расположена шлюзовая камера. Силовые тросы взаимодействуют с размещенными на модуле управляющими лебедками, электроприводы - с аппаратурой управления и контроллерами, которые находятся внутри прочной капсулы, нижние концы силовых тросов снабжены крепежными узлами с подводным объектом, верхние концы имеют размещенный в барабанах запас длины, а расстояние между ними определяется траверсой, имеющей крепежные к надводному объекту приспособления. Достигается сокращение времени на выполнение транспортных операций и расширение функциональных возможностей модуля. 1 ил.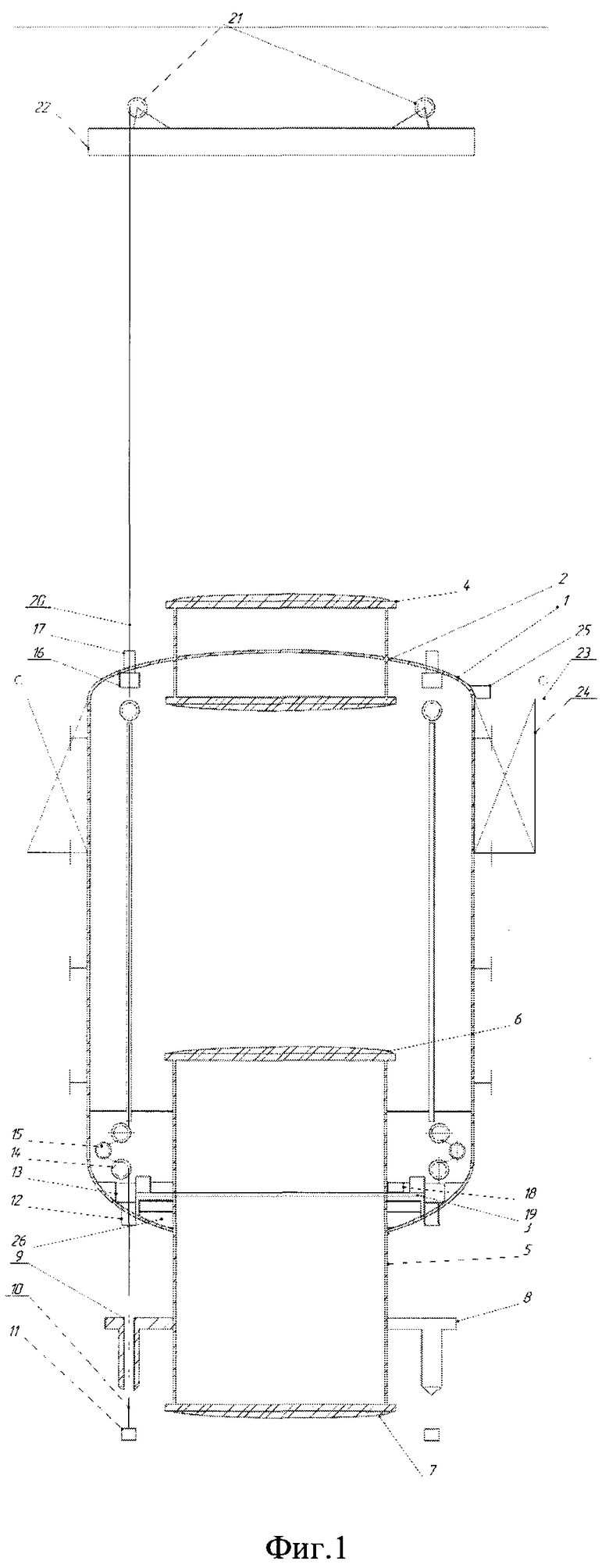
Многофункциональный модуль оперативной транспортной взаимосвязи подводного/подледного и надводного объектов, включающий прочную капсулу с верхним и нижним днищами и изолированной от забортной среды газовой полостью, в верхнем днище вырезан входной люк, в нижнем расположен люк входа/выхода в шлюзовую камеру, на наружной стороне нижнего днища закреплены комингс-площадка и полые ловители, через которые пропущены силовые тросы принудительного вертикального перемещения модуля с помощью синхронно работающих управляемых лебедок: модуль снабжен балластными цистернами системы управления его плавучестью, станцией воздуха высокого давления, системой информационной связи с центром управления работой и посадочной площадкой, отличающийся тем, что на нижнем днище соосно с входным люком расположена шлюзовая камера, силовые тросы взаимодействуют с размещенными на модуле управляющими лебедками, электроприводы с аппаратурой управления и контроллерами, которые находятся внутри прочной капсулы, нижние концы силовых тросов снабжены крепежными узлами с подводным объектом, верхние концы имеют размещенный в барабанах запас длины, а расстояние между ними определяется траверсой, имеющей крепежные к надводному объекту приспособления.
| ПОДВОДНЫЙ ОБЪЕКТ С ТРАНСПОРТНЫМ МОДУЛЕМ ДЛЯ ВНЕШНЕЙ ПЕРЕДАЧИ ЛЮДЕЙ И ГРУЗОВ | 2017 |
|
RU2681479C1 |
| СПОСОБ ЭВАКУАЦИИ ЭКИПАЖА С АВАРИЙНОЙ ПОДВОДНОЙ ЛОДКИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2005 |
|
RU2346849C2 |
| НОЖ ОТВАЛА ГРЕЙДЕРА | 2007 |
|
RU2379428C2 |

