Грузовой терминал добычливого комплекса подводных рассыпных месторождений относится к подводным роботизированным комплексам, в частности к оборудованию транспортных линий доставки подводных грузов на поверхность акватории, и может быть использован в инновационных разработках по освоению ресурсов Мирового океана.
Известно «Устройство для подъема затонувшего объекта» по авторскому свидетельству SU №1579845 (МПК В63С 7/00) от 23.07.1990 г., предназначенное для подъема затонувшего объекта на обеспечивающее судно с помощью кабель-троса, играющего роль троса-проводника, по которому перемещается грузозахватное приспособление, снабженное элементом плавучести и сбрасываемым балластом.
После срабатывания узла стыковки с подводным объектом, грузозахватное приспособление сбрасывает балласт, и всплывающая сцепка «объект-приспособление» за кабель-трос подтягивается к судну.
Такая технология подъема трудоемка, она требует большой предварительной работы водолазов.
Известен «Подводный объект с транспортным модулем для внешней передачи людей и грузов» (см. патент РФ №2681479, 2019 г.), оснащенный системой ориентации транспортного модуля относительно подводного объекта с помощью двух-тросовой линии, содержащей два стыковочных с ним узла, в виде конических полых ловителей, взаимодействующих с ответными гнездами, жестко установленными на подводном объекте. К недостаткам такого технического решения следует отнести его применимость для малых объемов груза и сложность его (груза) перевалки на плавучее средство.
Известен «Многофункциональный модуль оперативной транспортной взаимосвязи подледного/подводного и надводного объектов» (см. патент №2746183, 2021 г.), предназначенный для решения задач срочной доставки грузов, водолазов и обслуживающего персонала как к уже функционирующим подводным платформам различного назначения, так и к спешно формируемым аварийно-спасательным комплексам оборудования, которое монтируется и используется специализированным контингентом работников.
По совокупности общих с заявляемым техническим решением признаков это устройство принято за прототип.
Основным недостатком прототипа является малый, определяемый размерами воздушной полости герметичной камеры транспортного модуля объем и масса поднимаемого груза. Кроме того, мощность лебедки вертикального перемещения модуля не предполагает подъем грузов с существенными массогабаритными характеристиками.
Задачей, на решение которой направлено предлагаемое техническое решение, является разработка многократно и длительно работающей грузо-транспортной линии, способной доставлять на поверхность со значительных глубин рассыпные материалы (например - конкреции, руду) с минимизацией ручных операций.
Решение поставленной технологической задачи достигается тем, что грузовой терминал добычливого комплекса подводных рассыпных месторождений содержит транспортный модуль в виде герметичной камеры, имеющей прочный корпус, оснащенный верхним и нижним днищами с входными люками (с изолированной от забортной среды воздушной полостью). На нижнем днище смонтированы полые ловители двух-тросовой линии связи транспортного модуля с подводным объектом. Принудительное вертикальное перемещение модуля на глубину достигается с помощью расположенных в герметичной камере синхронно работающих управляемых лебедок. Этим обеспечивается необходимая и надежная ориентация транспортного модуля относительно подводного объекта в составе робототехнического комплекса без привлечения экипажного или автоматизированного управления. Модуль снабжен балластными цистернами системы управления его плавучестью, станцией воздуха высокого давления и системой информационной связи с центром управления работой комплекса.
На нижнем днище транспортного модуля размещены быстроработающие приспособления крепления к нему грузового контейнера, а на верхнем днище закреплены грузовые тросы лебедок подъема транспортного модуля в сцепке с грузовым контейнером на поверхность акватории (с гнездами под стыковочные и фиксирующие соединения с надводным объектом, чаще всего в виде обеспечивающего судна).
Использование верхней и нижней грузовых, решающих проблемы точной ориентации относительно подводного и надводного объектов транспортных линий, дает возможность автоматизации доставки собираемых рассыпных материалов на обеспечивающие суда.
Изобретение иллюстрируется рисунками. На предлагаемых фигурах изображены:
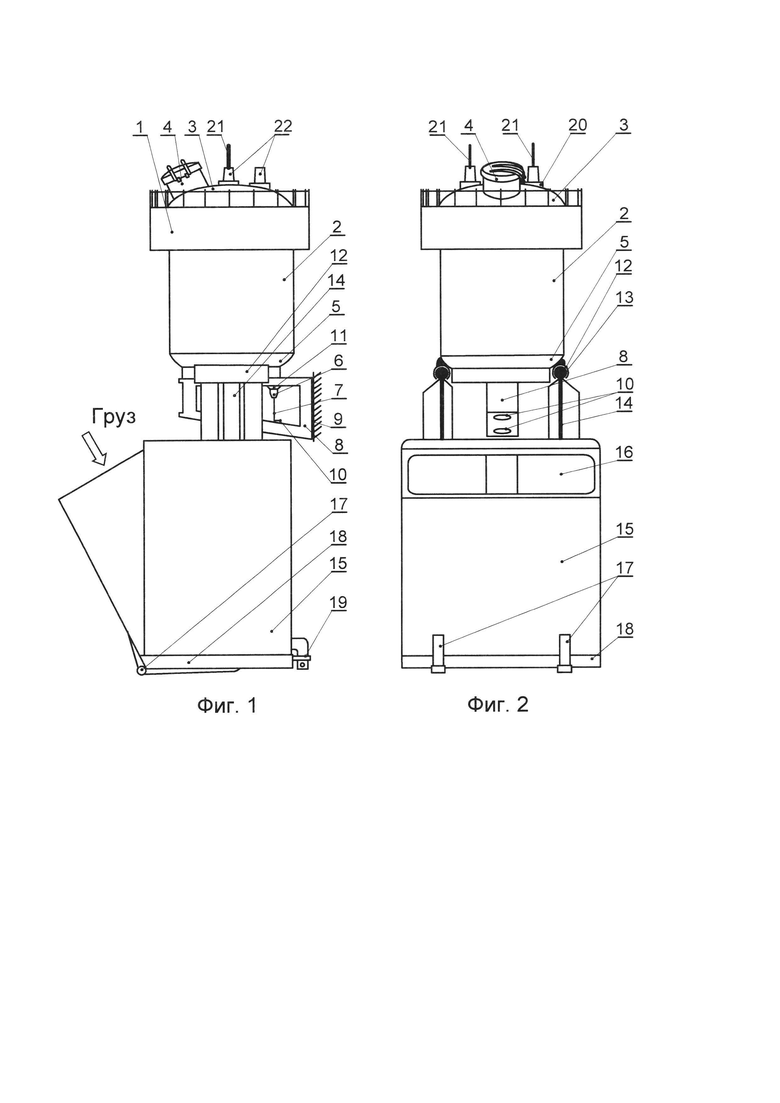
Фиг. 1 и фиг.2 - проекции транспортного модуля с грузовым контейнером, сочлененные с подводным объектом;
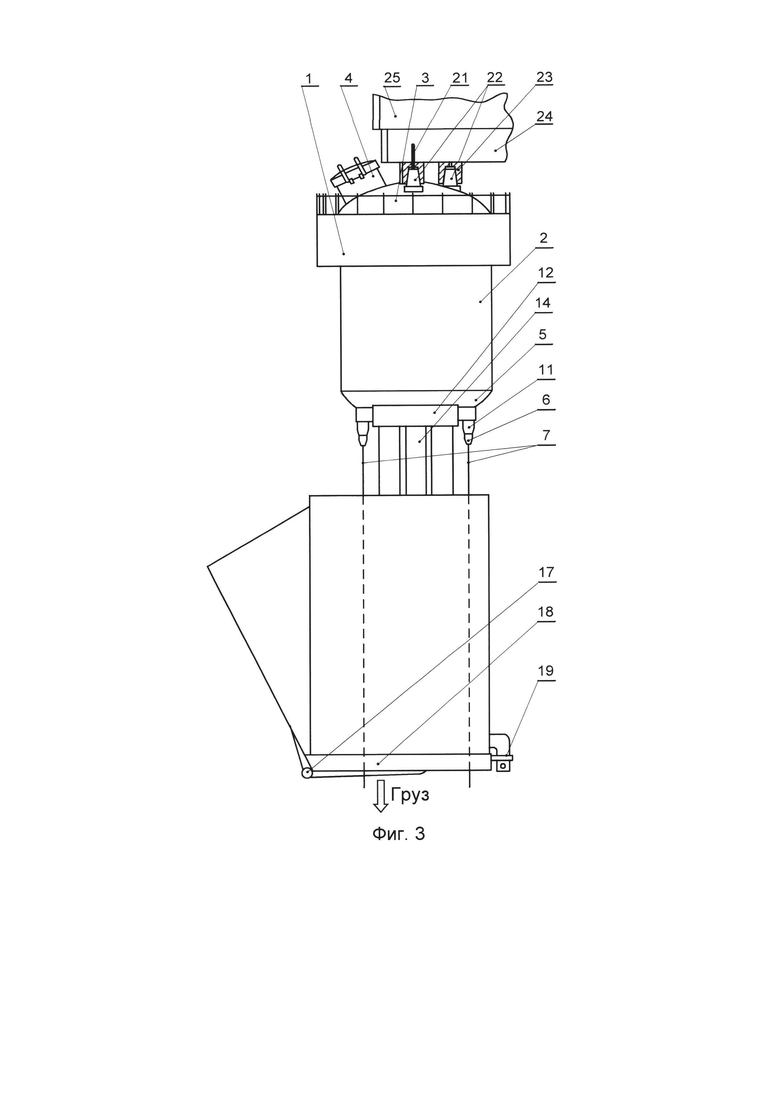
Фиг. 3 - объемный вид транспортного модуля с тросовыми связями;
Фиг. 4 - транспортный модуль и грузовой контейнер, сочлененные с надводным объектом;
Фиг. 5 - возможный общий вид надводной части грузового терминала.
Грузовой терминал содержит (фиг.1 и 2) транспортный модуль 1, выполненный в виде поплавка, включающего герметичную камеру, имеющую прочный корпус 2, верхнее днище с входным в прочный корпус 2 люком 4 и нижнее днище 5, на котором размещены полые ловители 6 (см. также фиг.3 и 4.), через них пропущены тросы 7 двух-тросовой линии связи транспортного модуля (герметичной камеры) 1 с кронштейном 8 подводного объекта 9. На кронштейне 8 жестко установлены узлы 10 крепления тросов 7 и направляющие гнезда 11 ловителей 6. Лебедки двух-тросовой связи и расположенные в гермообъемах их управляемые приводы не показаны.
На нижнем днище 5 неподвижно установлены трубчатые с продольными прорезями держатели 12, в которых стопорами (на фигурах не показаны) фиксируются грузовые наделки 13 стойками 14, связанными с грузовым контейнером 15 доставки на поверхность собираемых на дне грузов.
Нижний торец имеющего приемный люк 16 грузового контейнера 15 закрыт откидывающейся на петлях 17 крышкой 18, фиксируемой быстро-раскрываемыми замками 19.
На верхнем днище 3 транспортного модуля 1 смонтированы узлы 20 закрепления грузовых тросов 21. Эти узлы совместно с дополнительным коническим штырем образуют триаду конических штырей 22 (фиг.3), надежно фиксирующих сцепку «транспортный модуль 1 - грузовой контейнер 15» на приемных ловителях 23 (фиг.4) опорной площадки 24 надводного объекта 25.
На фиг.5 показан внешний вид поднятой на надводный объект 25 сцепки «транспортный модуль 1 - грузовой контейнер 15».
Работа грузового терминала осуществляется следующим образом.
Доставленная на «рабочую точку» сцепка (фиг.4 и 5) «транспортный модуль 1 - грузовой контейнер 15» втугую грузовыми тросами 21, работой управляемых приводом грузовых лебедок (на фигурах не показаны), поднимается к надводному объекту 25; установленными на опорной площадке 24 надводного объекта 25 приемными ловителями 23 и коническими штырями 22 (см. также фиг.3) сцепка жестко крепится к нему и тросами 7 двух-тросовой линии связи соединяется (фиг.1) с кронштейном 8 подводного объекта 9.
Совместной коррелируемой работой грузовых лебедок и лебедок двухсторонней линии связи сцепка опускается в воду, доставляется к подводному объекту 9 и полыми ловителями 6 (фиг.1 и 2) неподвижно ориентируется относительно его кронштейна 8 в направляющих гнездах 11.
Погрузка собранных на дне рассыпных грузов производится в контейнер 15 через приемный люк 16.
Собранный груз доставляется на надводный объект 25 сцепкой «транспортный модуль 1 - грузовой контейнер 15» путем коррелируемой работы лебедок двух-тросовой линии связи (с увеличением длины тросов 7) и грузовых (подъем сцепки).
Сброс груза осуществляется при откинутой на петлях 17 крышке 18 при раскрытии замков 19. После закрытия крышки 18 грузового контейнера 15 цикл работы терминала повторяется.
При необходимости возможна быстрая замена на другой контейнер 15 выдвижением наделок 13 из трубчатых держателей 12 при снятии непоказанных на фигурах стопоров.
На надводном объекте (например, обеспечивающем судне) могут располагаться несколько грузовых терминалов, совместной работой которых достигается необходимая производительность добычливого комплекса подводного рассыпного месторождения.
| название | год | авторы | номер документа |
|---|---|---|---|
| МНОГОФУНКЦИОНАЛЬНЫЙ МОДУЛЬ ОПЕРАТИВНОЙ ТРАНСПОРТНОЙ ВЗАИМОСВЯЗИ ПОДВОДНОГО/ПОДЛЕДНОГО И НАДВОДНОГО ОБЪЕКТОВ | 2020 |
|
RU2746183C1 |
| ПОДВОДНЫЙ ОБЪЕКТ С ТРАНСПОРТНЫМ МОДУЛЕМ ДЛЯ ВНЕШНЕЙ ПЕРЕДАЧИ ЛЮДЕЙ И ГРУЗОВ | 2017 |
|
RU2681479C1 |
| БЫСТРОХОДНОЕ СПАСАТЕЛЬНОЕ СУДНО | 2023 |
|
RU2798921C1 |
| КОМБИНИРОВАННЫЙ ПОДВОДНЫЙ РОБОТОТЕХНИЧЕСКИЙ КОМПЛЕКС | 2022 |
|
RU2809785C1 |
| ГЛУБОКОВОДНЫЙ ДОБЫЧНОЙ КОМПЛЕКС И ТЕЛЕУПРАВЛЯЕМЫЙ ПОДВОДНЫЙ РОБОТ | 2002 |
|
RU2214510C1 |
| Плавучий барьер "Спрут" и плавучий элемент | 2023 |
|
RU2799172C1 |
| Плавучий барьер (варианты) | 2022 |
|
RU2794664C1 |
| СПОСОБ ТРАНСПОРТИРОВКИ, ЗАГРУЗКИ И РАЗГРУЗКИ КРУПНОГАБАРИТНЫХ ГРУЗОВ В ГРУЗОВУЮ КАБИНУ САМОЛЕТА И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2002 |
|
RU2248308C2 |
| ПСЕВДОИМИТАТОР СТАРТОВОГО КОМПЛЕКСА | 2013 |
|
RU2543436C9 |
| ПОДВОДНАЯ ТРАНСПОРТНАЯ СИСТЕМА | 2010 |
|
RU2462388C2 |

Изобретение относится к подводным роботизированным комплексам и может быть использовано в разработках по освоению ресурсов Мирового океана. Грузовой терминал добычного комплекса подводных россыпных месторождений содержит транспортный модуль в виде герметичной камеры с входным люком и синхронно работающими лебедками его вертикального перемещения и оснащен узлами крепления к нему грузового контейнера доставки на поверхность собираемых грузов. На верхнем днище модуля смонтированы совместно с коническими штырями и приемными ловителями устройства жесткой ориентации и фиксации транспортного модуля относительно надводного в составе добычного комплекса объекта узлы крепления силовых тросов грузовых с управляющими приводами синхронно работающих лебедок подъема на поверхность сцепки транспортный модуль - грузовой контейнер. Технический результат, заключающийся в возможности автоматизации доставки собираемых россыпных материалов на обеспечивающие суда, достигается использованием верхней грузовой и нижней транспортных линий, решающих проблемы точной ориентации и фиксации транспортного модуля относительно подводного и надводного объектов. 5 ил.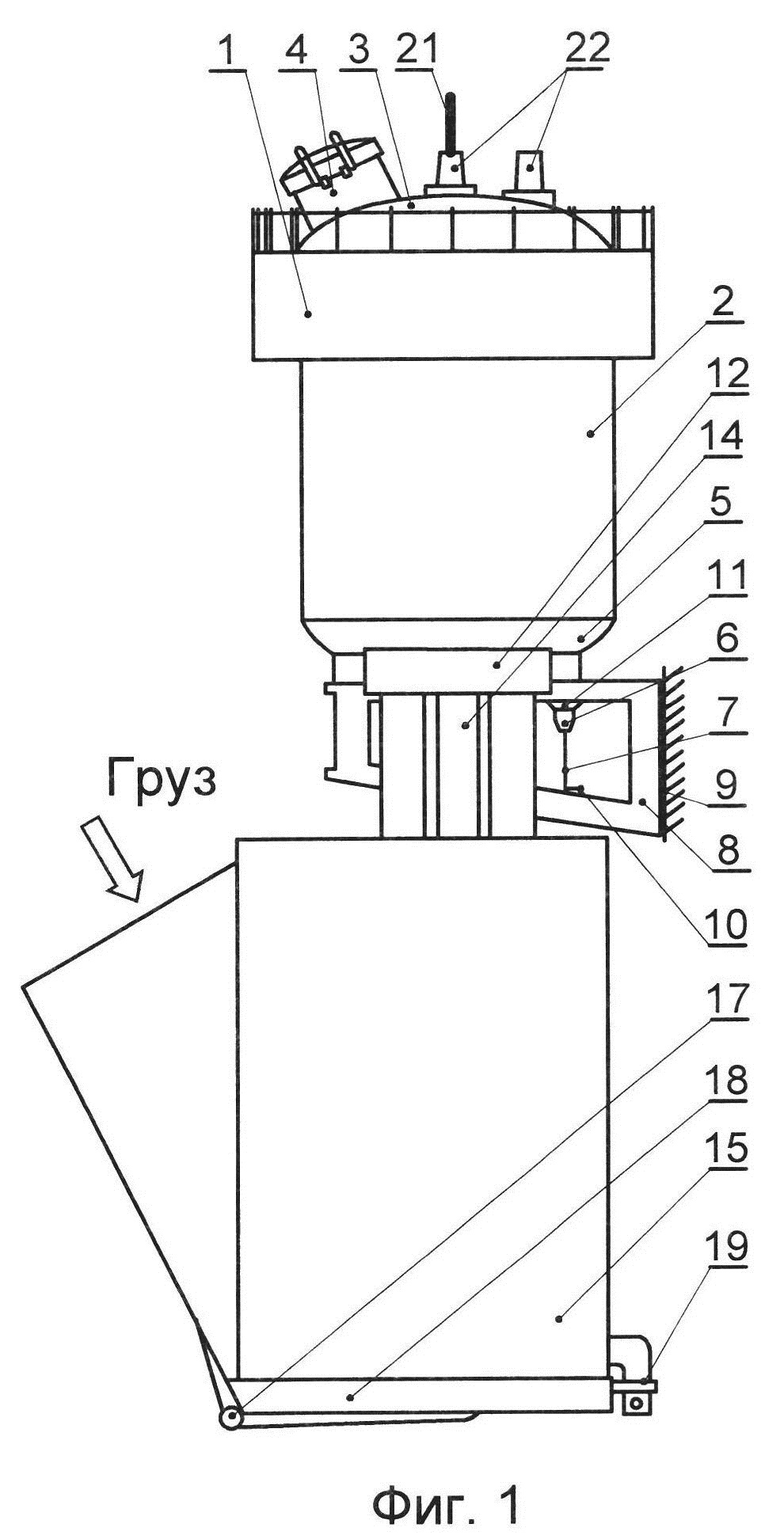
Грузовой терминал добычного комплекса подводных россыпных месторождений, содержащий транспортный модуль в виде герметичной камеры, имеющий прочный корпус, оснащенный верхним и нижним днищами с входными люками, конфигурирующими изолированную от забортной среды воздушную полость, на нижнем днище смонтированы полые ловители двухтросовой линии связи транспортного модуля с подводным в составе добычного комплекса объектом, взаимодействующие с размещенными на подводном объекте направляющими гнездами, и синхронно работающие для вертикального перемещения транспортного модуля на глубину лебедки двухтросовой линии связи с расположенными в гермообъемах управляемыми приводами, отличающийся тем, что транспортный модуль оснащен узлами крепления к нему грузового контейнера доставки на поверхность собираемых грузов, на верхнем днище смонтированы совместно с коническими штырями и приемными ловителями устройства жесткой ориентации и фиксации транспортного модуля относительно надводного объекта узлы крепления силовых тросов расположенных на надводном в составе добычного комплекса объекте грузовых с управляемыми приводами синхронно работающих лебедок подъема сцепки транспортный модуль - грузовой контейнер.
| ПОДВОДНЫЙ ОБЪЕКТ С ТРАНСПОРТНЫМ МОДУЛЕМ ДЛЯ ВНЕШНЕЙ ПЕРЕДАЧИ ЛЮДЕЙ И ГРУЗОВ | 2017 |
|
RU2681479C1 |
| RU 2001276 C1, 15.10.1993 | |||
| МНОГОФУНКЦИОНАЛЬНЫЙ МОДУЛЬ ОПЕРАТИВНОЙ ТРАНСПОРТНОЙ ВЗАИМОСВЯЗИ ПОДВОДНОГО/ПОДЛЕДНОГО И НАДВОДНОГО ОБЪЕКТОВ | 2020 |
|
RU2746183C1 |
| КОМПЛЕКС ДЛЯ РАЗРАБОТКИ ПОДВОДНЫХ ФОРМАЦИЙ | 1999 |
|
RU2151872C1 |
| KR 20180063833 A, 12.06.2018. | |||

