Область техники, к которой относится изобретение
Изобретение относится к области военной техники и может быть использовано для уничтожения техники противника.
Уровень техники
Известен способ стрельбы из винтовки, которая имеет узлы, размещенные в выемке на поверхности ландшафта, в которые входит винтовка, стационарная ЭВМ и радиостанция, устройства наведения винтовки на цель и осуществление выстрела, блок питания, соединительные провода;
наблюдательный пункт для корректировщика стрельбы с мобильным управляющим устройством, содержащим ЭВМ, радиостанцию, блок питания, которые электрическими проводами связаны между собой; отличающийся тем, что
выемка на поверхности ландшафта накрыта броневым щитком, под которым размещено электромеханическое устройство для воздействия на спусковой крючок, подъемный и поворотный механизмы для наведения винтовки на цель;
электромеханические устройства с помощью электрических проводов соединены со стационарной ЭВМ;
мобильное управляющее устройство имеет рычаги, которые воздействуют на мобильную ЭВМ, которая с участием мобильной и стационарной радиостанций и стационарной ЭВМ осуществляет наведение винтовки на цель, а впоследствии корректировщик, наблюдая за полетом трассирующей пули, изменяет траекторию полета пуль следующих выстрелов;
наведение винтовки на цель осуществляется корректировщиком, который наблюдает через бинокль или перископ за полетом пуль в направлении цели и дистанционно наводит винтовку точно в цель;
на винтовке нет прицела, мушки и оптических приборов наведения на цель;
дистанционное управление винтовкой делает присутствие бойца на поле боя более безопасным;
корректировщик может осуществлять наведение одной или нескольких винтовок поочередно на одну и ту же или разные цели, создавая эффект присутствия нескольких бойцов;
присутствие на поле боя нескольких корректировщиков управляющими одними и теми же или разными огневыми точками существенно повышает боеспособность подразделения, участвующего в обстреле целей. [Патент 271015 Способ стрельбы из винтовки, Полевой Ю.И. Опубликовано: 18.03.2020 Бюл. №8].
Недостатком способа является то, что наведение винтовки на цель является достаточно трудоемким процессом, требует большой сноровки, сосредоточенности и выполняется достаточно медленно.
Известна система дистанционного управления движением и вооружением беспилотной боевой машины ББМ, состоящая из устройств ГЛОНАСС, беспилотного летательного аппарата БЛА беспилотной боевой машины ББМ, отличающаяся тем, что
дополнительно имеется командный пункт, капсула, электронные и электромеханические устройства ББМ, управляющие и контролирующие устройства регулирования движения и управления вооружением, размещенные в командном пункте;
содержит пульт управления и контроля для ББМ, пульт управления и контроля для БЛА, ЭВМ центрального поста, радиостанцию для связи командного пункта с капсулой, ББМ и БЛА, радиотелефон для связи командного пункта с капсулой;
капсула содержит пульт управления и контроля ББМ и БЛА, радиостанцию для связи капсулы с командным пунктом, БЛА и ББМ, приемник ГЛОНАСС;
ББМ содержит радиостанцию для связи ЭВМ с командным пунктом, БЛА, капсулой, приемник для приема сигналов ГЛОНАСС, ЭВМ для воздействия и контроля за управлением устройствами, которые воздействуют на двигатель и электромоторы, рулевое управление, вооружение, земляные фрезы;
БЛА содержит радиостанцию для связи с командным пунктом, капсулой и ББМ, контроллер для управления и контроля двигателями и фотокамерой [Патент 2671138 Беспилотная боевая машина и система дистанционного управления движением и вооружением беспилотной боевой машиной (второй пункт формулы), Полевой Ю.И. Опубликовано: 29.10.2018. Бюл. №31].
Недостатком известной система является то, что наведение орудия на цель выполняет человек, который самостоятельно оценивает влияние атмосферных условий на полет снаряда и наводит орудие на новую цель, что занимает значительное время.
Данное изобретение выбрано в качестве прототипа.
Раскрытие изобретения
Техническим результатом является повышение точность стрельбы и сокращение времени поражения цели.
Способ поражения подвижных целей, заключающийся в том, что орудие заряжается и наводится на цель с помощью электронно-вычислительной машины ЭВМ, электромеханических устройств подачи снарядов, заряжания и выброса гильзы УЗ, устройств наведения орудия на цель УЦ; первоначально боец с помощью артиллерийского прицела наводит орудие на неподвижную цель и осуществляет первый выстрел, отличающийся тем, что в память ЭВМ внесены изображения и габаритные размеры транспортных средств противника (бронетранспортеры, танки, самоходные орудия и д.р.);
в программе ЭВМ записан алгоритм определения направления движения транспортных средства и скорости по двум стоп-кадрам изображения поля боя;
боец указкой отмечает неподвижную цель и место разрыва первого снаряда, благодаря чему в память ЭВМ вводятся координаты цели и места разрыва снаряда;
ЭВМ по этим координатам определяет поправки для наведения орудия на цель с учетом воздействия атмосферных условий (ветер, осадки, температура и т.д.), дает команды на заряжание орудия, повторное наведение орудия на ту же цель с учетом поправок и выстрел из орудия;
после попадания снаряда в цель боец указкой на сенсорном мониторе ЭВМ отмечает другие цели в порядке, в котором должен быть произведен их обстрел;
ЭВМ дает команду на наведение орудия на первую подвижную цель, наведение орудия на цель осуществляется с учетом рассчитанных поправок, направления и скорости движения подвижной цели, времени движения цели от момента фиксации последнего стоп-кадра до поражения цели;
наведение орудия на первую подвижную цель производится с учетом положения ствола орудия наведенного на неподвижную цель и расстояния от нее до первой подвижной цели, которое определяется по расположению целей на изображении монитора ЭВМ;
если другие цели находятся (примерно) на одинаковом расстоянии от орудия и на одном уровне с неподвижной целью, то их уничтожение осуществляется аналогично;
если расстояния от орудия до целей существенно отличаются, то цели обстреливаются при пересечении подвижными целями линии поражения.
Краткое описание чертежей
На фиг. 1 представлен фрагмент орудия с устройствами заряжения и наведения орудия на цель; на фиг. 2 (картинка экран монитора ЭВМ соответствует картинке поля боя) изображено орудие, цели, траектории полета снарядов.
Осуществление изобретения
На фиг. 1 и 2 показаны следующие условные обозначения:
1 - орудие ОР;
2 - электромеханические устройства подачи снарядов, заряжания и выброса гильзы УЗ;
3 - электромеханические устройства наведения орудия на цель УЦ;
4 - фотокамера ФК;
5 - электронно-вычислительная машина ЭВМ для осуществления заряжания и наведения орудия на цель, контроля местонахождения целей, коррекции траекторий полета снарядов;
6, 7 и 8 электрические связи между устройствами, фотокамерой и ЭВМ.
На фиг. 2 неподвижная цель обозначена сочетанием символов ЦН; подвижные цели - Ц1, Ц2, Ц3 и Ц4; точки наведения на цели БН, Б1, Б2, Б3 и Б4; точки предполагаемых попадания снарядов по целям АН, A1, А2, A3 и А4; точка разрыва первого снаряда ПС; направления передвиженияй целей V1 V2, V3 и V4; линия поражения - линия, при пересечении которой осуществляется обстрел подвижных целей.
Главными достоинствами способа является то, что ЭВМ по результату первого выстрела определяет поправки в вертикальной и горизонтальной плоскости и осуществляет наведение орудия на цели с учетом атмосферных воздействий (ветер, осадки, плотность воздуха и др.); остальные действия по уничтожению подвижных целей осуществляются без участия бойца.
На фиг. 1 представлен фрагмент орудия с устройствами заряжания и наведения его на цель. Орудие OP 1 снабжено электромеханическим устройством подачи снарядов, заряжания и выброса гильзы УЗ 2, электромеханическим устройством наведения орудия на цель УЦ 3, фотокамерой ФК 4 и ЭВМ 5.
Расположение целей Ц1, ЦН, Ц2, Ц3 и Ц4 на экране монитора ЭВМ 5 соответствует расположению целей на поле боя.
Способ поражения подвижных целей заключается в том, что орудие заряжается и наводится на цель с помощью электронно-вычислительной машины ЭВМ 5, электромеханических устройств подачи снарядов, заряжания и выброса гильзы УЗ 2, устройств наведения орудия на цель УЦ 3.
В память ЭВМ 5 внесены изображения и габаритные размеры транспортных средств противника (бронетранспортеры, танки, самоходные орудия и д.р.). В программе ЭВМ 5 записан алгоритм определения направления движения транспортных средства и скорости по двум стоп-кадрам изображения поля боя.
Действия по поражению целей начинаются с того боец с помощью артиллерийского прицела наводит орудие на неподвижную цель ЦН и осуществляет первый выстрел. Затем боец указкой отмечает неподвижную цель и место разрыва первого снаряда, благодаря чему в память ЭВМ 5 вводятся координаты цели и места разрыва снаряда. По этим координатам ЭВМ 5 определяет поправки для наведения орудия на цель с учетом воздействия атмосферных условий (ветер, осадки, температура и т.д.), дает команды на заряжение орудия, повторное наведение орудия на ту же цель с учетом поправок и выстрел из орудия.
После попадания снаряда в цель ЦН боец указкой на сенсорном мониторе ЭВМ 5 отмечает другие цели в порядке, в котором должен быть произведен их обстрел. ЭВМ 5 дает команду на наведение орудия на первую подвижную цель Ц1. Наведение орудия на цель осуществляется с учетом рассчитанных поправок, направления и скорости движения подвижной цели, времени движения цели от момента фиксации последнего стоп-кадра до поражения цели. Наведение орудия на первую подвижную цель Ц1 производится с учетом положения ствола орудия наведенного на неподвижную цель ЦН и расстояния от нее до первой подвижной цели Ц1, которое определяется по расположению целей на изображении монитора ЭВМ 5. Если другие цели находятся (примерно) на одинаковом расстоянии от орудия OP 1 и на одном уровне с ним, то их уничтожение осуществляется аналогично, если расстояния от орудия до целей существенно отличаются, то эти цели обстреливаются при их пересечении линии поражения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ НАВЕДЕНИЯ ОРУДИЯ НА ЦЕЛЬ | 2020 |
|
RU2743597C1 |
| СПОСОБ НАВЕДЕНИЯ НА ЦЕЛЬ РЕАКТИВНОЙ СИСТЕМЫ | 2020 |
|
RU2753940C1 |
| СИСТЕМА ДИСТАНЦИОННОГО УПРАВЛЕНИЯ САМОЗАРЯДНОЙ ВИНТОВКОЙ | 2019 |
|
RU2723700C1 |
| Способ автоматического наведения орудия на цель | 2019 |
|
RU2728292C1 |
| Беспилотная боевая машина и система дистанционного управления движением и вооружением беспилотной боевой машиной | 2017 |
|
RU2671138C1 |
| СПОСОБ ПОРАЖЕНИЯ ЛЕТЯЩЕГО ПЕРЕМЕННЫМ КУРСОМ И ВЫСОТОЙ ОБЪЕКТА | 2020 |
|
RU2741133C1 |
| СПОСОБ УПРАВЛЕНИЯ ПОЛЕТОМ РЕАКТИВНЫХ СНАРЯДОВ | 2020 |
|
RU2747681C1 |
| Устройство для дистанционной стрельбы | 2024 |
|
RU2839417C1 |
| Орудие | 2023 |
|
RU2815020C1 |
| СПОСОБ СТРЕЛЬБЫ УПРАВЛЯЕМЫМ СНАРЯДОМ С ЛАЗЕРНОЙ ПОЛУАКТИВНОЙ ГОЛОВКОЙ САМОНАВЕДЕНИЯ И УСТРОЙСТВО, ЕГО РЕАЛИЗУЮЩЕЕ | 2019 |
|
RU2737634C2 |

Изобретение относится к области вооружения, а именно к способам повышения точности стрельбы. Способ заключается в том, что с помощью электронно-вычислительной машины ЭВМ, электромеханического устройства подачи снарядов, заряжания и выброса гильзы, устройства наведения орудия на цель осуществляется подготовка орудия к выстрелу, боец с помощью артиллерийского прицела наводит орудие на цель и осуществляет первый выстрел. Затем боец на мониторе ЭВМ, где отображены цели, указкой отмечает первую цель и место разрыва снаряда, благодаря чему в память ЭВМ заносятся координаты цели и места разрыва снаряда. После этого ЭВМ по координатам первой цели и места разрыва снаряда определяет поправки для наведения орудия на цель. Электромеханическое устройство наведения орудия на цель получает команду от ЭВМ о наведении орудия на цель, повторно наводит орудие на первую цель с учетом поправок, после чего дает команду на выстрел. После поражения первой цели боец на мониторе отмечает координаты других целей, находящихся примерно на одинаковом расстоянии от орудия и одном уровне относительно других целей по вертикали, и дает команду на поражение этих целей, стрельба по которым осуществляется автоматически с учетом ранее определенных поправок, которые учитывают атмосферные условия (ветер, плотность воздуха и др.), движения подвижных целей. Техническим результатом является повышение точности стрельбы и сокращение времени наведения орудия на цель. 2 ил. 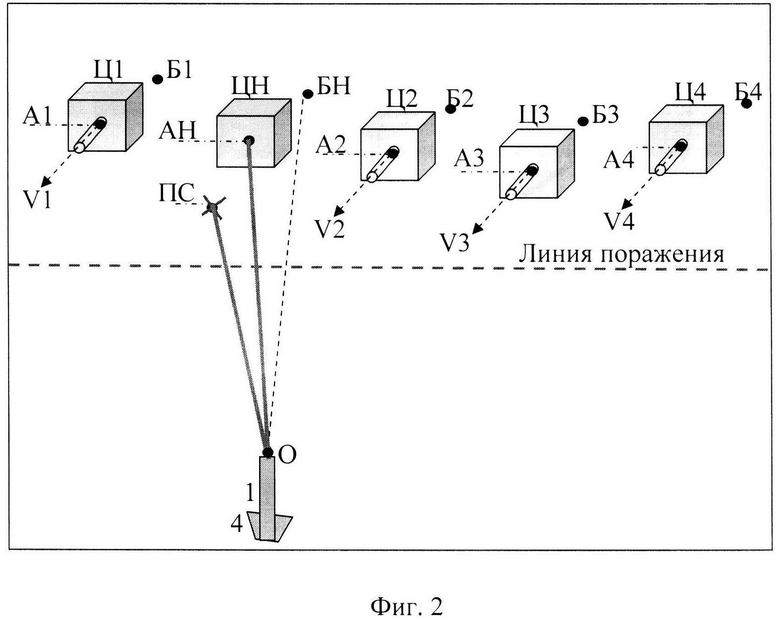
Способ поражения подвижных целей, заключающийся в том, что орудие заряжается и наводится на цель с помощью электронно-вычислительной машины ЭВМ, электромеханических устройств подачи снарядов, заряжания и выброса гильзы, устройств наведения орудия на цель; первоначально боец с помощью артиллерийского прицела наводит орудие на неподвижную цель и осуществляет первый выстрел, отличающийся тем, что
в память ЭВМ внесены изображения и габаритные размеры транспортных средств противника;
в программе ЭВМ записан алгоритм определения направления движения транспортных средства и скорости их движения по двум стоп-кадрам изображения поля боя;
боец указкой отмечает неподвижную цель и место разрыва первого снаряда, благодаря чему в память ЭВМ вводятся координаты цели и места разрыва снаряда;
ЭВМ по этим координатам определяет поправки для наведения орудия на цель с учетом воздействия атмосферных условий, дает команды на заряжание орудия, повторное наведение орудия на ту же цель с учетом поправок и выстрел из орудия;
после попадания снаряда в цель боец указкой на сенсорном мониторе ЭВМ отмечает другие цели в порядке, в котором должен быть произведен их обстрел;
ЭВМ дает команду на наведение орудия на первую подвижную цель, наведение орудия на цель осуществляется с учетом рассчитанных поправок, направления и скорости движения подвижной цели, времени движения цели от момента фиксации последнего стоп-кадра до поражения цели;
наведение орудия на первую подвижную цель производится с учетом положения ствола орудия, наведенного на неподвижную цель, и расстояния от нее до первой подвижной цели, которое определяется по расположению целей на изображении монитора ЭВМ;
если другие цели находятся на одинаковом расстоянии от орудия и на одном уровне с ним, то их уничтожение осуществляется аналогично;
если расстояния от орудия до целей существенно отличаются, то цели обстреливаются при пересечении подвижными целями линии поражения.
| Беспилотная боевая машина и система дистанционного управления движением и вооружением беспилотной боевой машиной | 2017 |
|
RU2671138C1 |
| СПОСОБ СТРЕЛЬБЫ АРТИЛЛЕРИЙСКИМИ СНАРЯДАМИ С ЗАКРЫТЫХ ОГНЕВЫХ ПОЗИЦИЙ | 2011 |
|
RU2453790C1 |
| СПОСОБ СТРЕЛЬБЫ ИЗ ВИНТОВКИ | 2019 |
|
RU2717015C1 |
| DE 4207251 A1, 09.09.1993. | |||

