Изобретение относится к области военной технике и может быть использовано для уничтожения боевой техники и живой силы противника, в первую очередь террористов.
Известна система управления бронетранспортером [БТР-90, представлена в интернете по адресу: Бронетранспортеры].
Недостатком системы является присутствие людей внутри обстреливаемого объекта.
Известно устройство управления (телемеханическая система), имеющая комбинацию из радиальной и многоточечной структуры [Устройства железнодорожной автоматики, телемеханики и связи: Ч 1. Учебник для вузов. / Шалягин Д.В., Цыбуля Н.А., Косенко С.С., Волков А.А. и др.; под редакцией Д.В. Шалягина. - М.: Маршрут, 2006. - 588 с. (стр. 86, 87)].
Недостатком устройства является то, что оно не пригодно для ведения боевых действий.
Данная система и реализующее его устройство выбраны в качестве прототипа.
Техническим результатом является исключение потерь среди личного состава при ведении боевых действий при штурме террористов на укрепленных позициях (в помещениях, в траншеях и огневых точках на местности, в лесном массиве и т.д.).
Технический результат, заключающийся в создании беспилотной боевой машины состоит в том, что дополнительно внутри бронированного корпуса беспилотной боевой машины предусмотрены механические устройства, которые приводятся в действие электродвигателями, управление которыми осуществляется посредством бортовой ЭВМ, которая, во-первых, может получать информацию с флэш-памяти о конфигурации маршрута движения, скорости движения в любой момент времени, управлять пушкой (заряжать орудие, наводить на цель, производить выстрел в заданный момент времени с учетом непрерывно измеряемых параметров воздействия на полет снаряда, отслеживания точки попадания и коррекции наведения орудия на цель), управлять пулеметом и ракетной установкой по аналогии с пушкой, управлять рытьем траншеи для скрытного размещения капсулы, и управлять рытьем траншеи для скрытного размещения боевого устройства; во-вторых, производить те же действия с коррекцией любой операции бойцом, находящимся в капсуле, которая определяется с участием ГЛОНАСС; в-третьих, проводить те же действия дополнительно с учетом перемещения цели по сигналам беспилотного летательного аппарата БЛА; в-четвертых, проводить те же действия с коррекцией любой операции бойцом или командиром с командного пункта, беспилотная боевая машина может быть использована для ведения боевых действий с противником и, наиболее подходит, для уничтожения террористов на укрепленных позициях.
Система дистанционного управления движением и вооружением беспилотной боевой машиной ББМ, состоящая из системы ГЛОНАСС, беспилотного летательного аппарата БЛА, беспилотной боевой машины ББМ, дополнительно имеет командный пункт КП, капсулу К, электронные и механические устройства беспилотной боевой машины ББМ, управляющие и контрольные устройства регулирования движения и управления вооружением, размещенные в командном пункте КП: пульт управления и контроля ПУКм для ББМ, пульт управления и контроля ПУКа для БЛА, ЭВМ центрального поста ЭВМц, радиостанцию РСц для связи КП с К, ББМ и БЛА, радиотелефон для связи командного пункта КП с капсулой К; в капсуле К - пульт управления и контроля ПУКо машиной ББМ и аппаратом БЛА, радиостанция РСкам для связи К с КП, БЛА и ББМ, приемник ГЛОНАСС ПРкг; в беспилотной боевой машине ББМ - радиостанция РСкка для связи ЭВМм с командным пунктом КП, аппаратом БЛА, капсулой К, приемник для приема сигналов ГЛОНАСС ПРмг, ЭВМм для воздействия и контроля за управляющими устройствами, которые воздействуют на двигатель и электромоторы, рулевое управление, вооружение, земляные фрезы; в БЛА -радиостанция РСо для связи с командным пунктом КП, капсулой К и ББМ, контроллер КонтрБЛА для управления и контроля двигателями ДвБЛА и камерой КамБЛА.
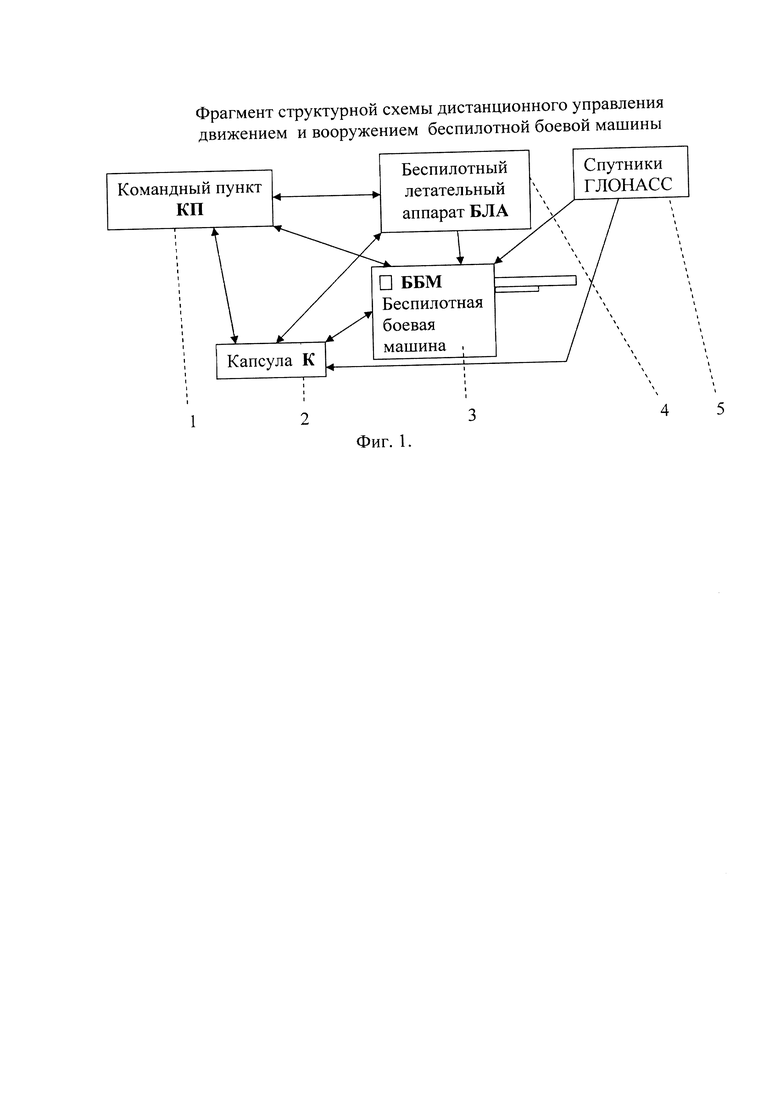
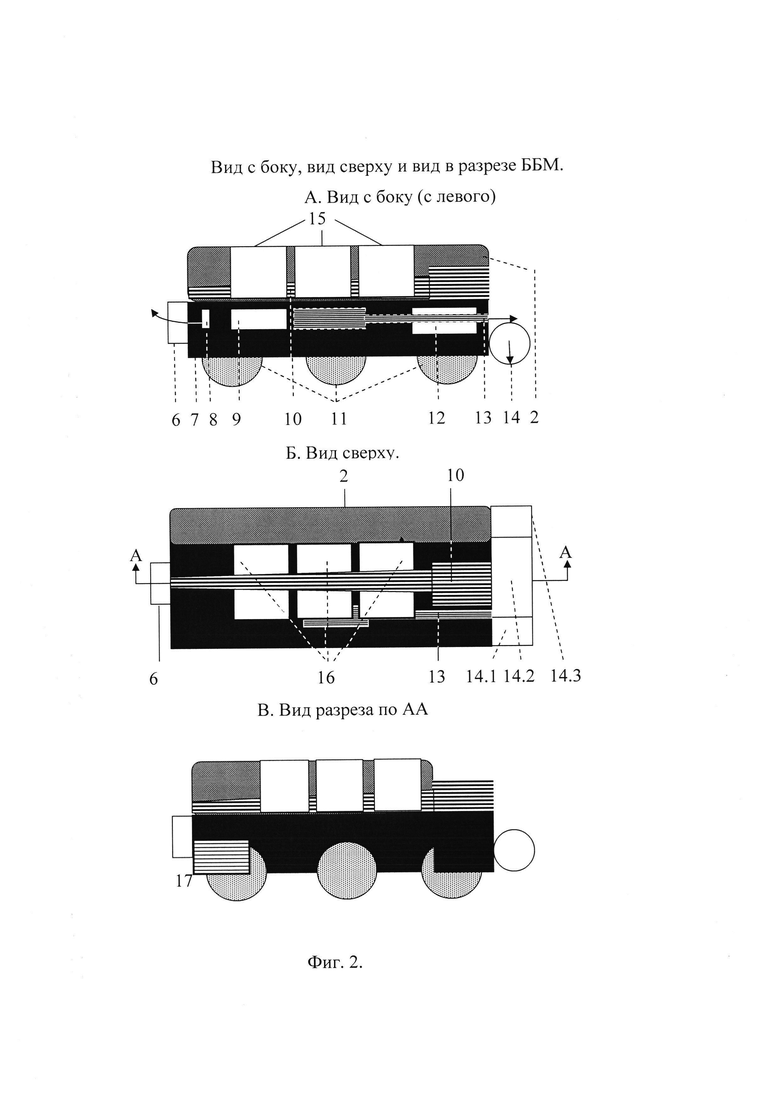
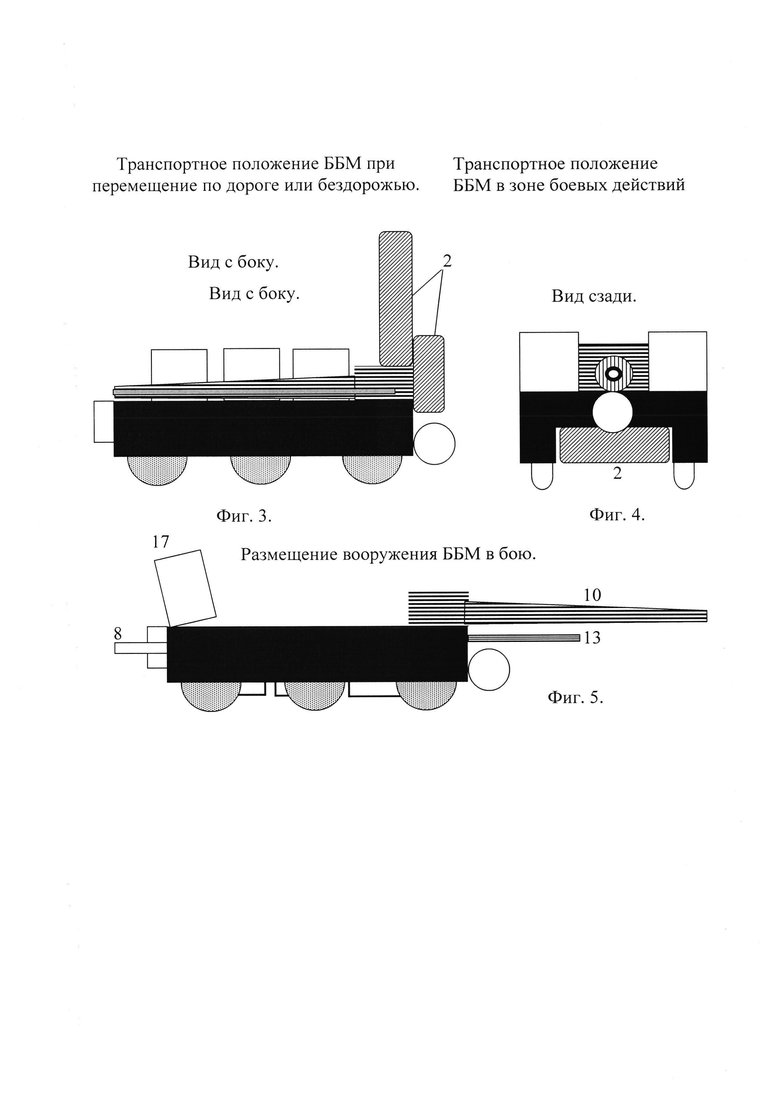
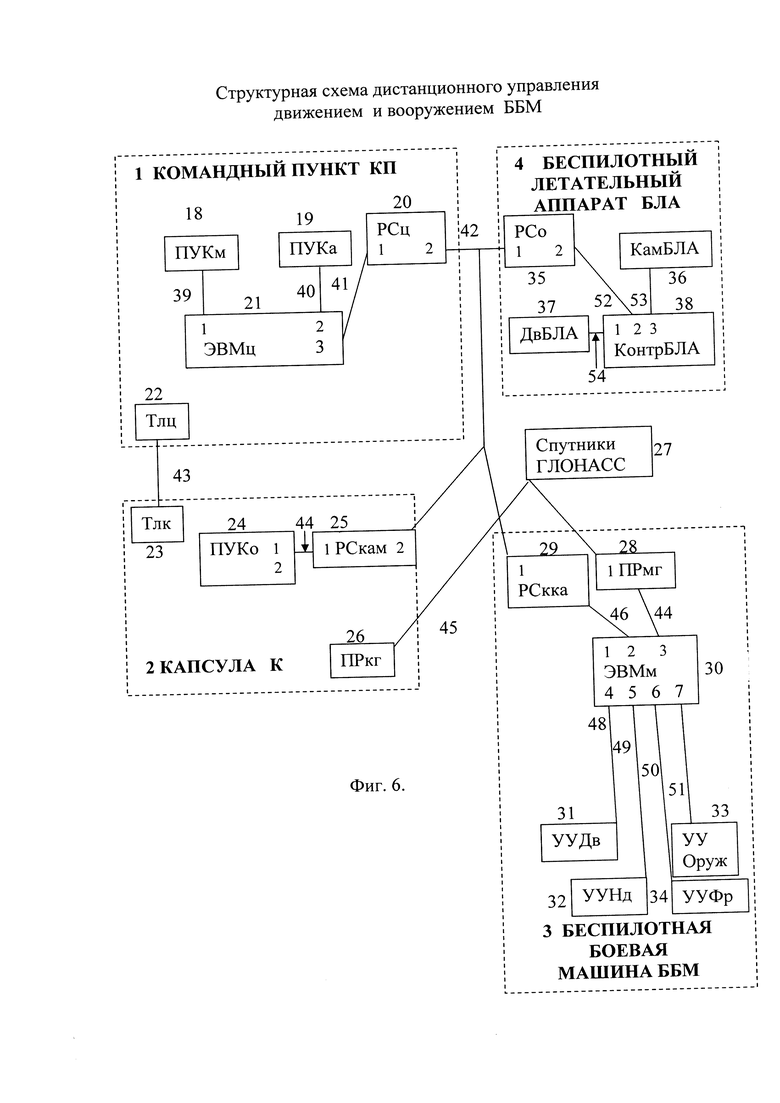
На фиг. 1 представлен фрагмент структурной схемы системы управления беспилотной боевой машины ББМ, на фиг. 2 изображены: вид с боку, вид с верху и вид в разрезе ББМ, на фиг. 3 показано транспортное положение ББМ при перемещение по дороге или бездорожью, на фиг. 4 изображено транспортное положение ББМ в зоне боевых действий, на фиг. 5 показано размещение вооружения ББМ в бою, на фиг. 6 представлена структурная схема системы управления ББМ. На фиг. 1 изображены: командный пункт КП 1, капсула К 2, беспилотная боевая машина ББМ 3, беспилотный летательный аппарат БЛА 4, спутники ГЛОНАСС 5. На фиг. 2-5 представлены: водяной двигатель 6, корпус ББМ 7, приемник ГЛОНАСС (выдвижной) 8, микроэлектронная система 9, пушка 10, колеса 11, двигатель 12, крупнокалиберный пулемет 13, землеройные фрезы 14 (14.1, 14.2, 14.3 -правая, средняя, левая, фрезы), правый боекомплект 15, левый боекомплект 16, ракетная установка 17. На фиг. 6 изображены: пульт управления и контроля ПУКм 18 для управления ББМ, пульт управления и контроля ПУКа 19 для управления БЛА, радиостанция РСц 20 для связи КП с К, ББМ и БЛА, электронная вычислительная машина центрального поста ЭВМц 21 для управления и контроля за действиями всей системы, радиотелефон КП Тлц 22 и радиотелефон телефон капсулы К Тлк 23 для осуществления двухсторонней связи. Пульт ПУКо 24 осуществляет управление и контроль за БЛА и ББМ. Радиостанция РСкам 25 осуществляет двухстороннюю связь между капсулой К, КП, ББМ и БЛА. Приемник ГЛОНАСС ПРкг 26 принимает сигналы со спутников ГЛОНАСС 27, приемник ПРмг также осуществляет прием сигналов со спутников. Радиостанция РСкка 29 осуществляет двухстороннюю связь между ББМ, КП, К и БЛА. ЭВМм 30 осуществляет управление движением и вооружением ББМ по программе, с участием бойца, находящегося в капсуле К, командира командного пункта КП, аппарата БЛА. ЭВМм управляет и контролирует (задает скорость движения) устройством управления движением УУДв 31, устройством управления направлением движения УУНд 32, устройством управления оружием УУОруж 33 и устройством управленцем работой фрезами УУФр 34. Радиостанция РСо 35 осуществляет двухстороннюю связь БЛА с КП, К и ББМ. РСо совместно с фотокамерой БЛА 36, двигателями ДвБЛА 37 воздействует на контроллер КонтрБЛА 38, который управляет перемещением БЛА, работой фотокамеры и передачей информации о противнике на КП, К и ББМ. Межблочные взаимодействия между элементами схем осуществляются о связям 39-53.
Усеченная работа ББМ возможна при выходе из строя части устройств и личного состава.
В исходном состоянии (фиг. 2) ствол пушки 10 расположен вдоль корпуса ББМ в сторону противоположную движения, боекомплекты 15 и 16 расположены слева и справа от ствола пушки, капсула расположена слева от ствола пушки, фрезы приподняты и могут опускаться при рытье траншей, приемник ГЛОНАСС 8 расположен внутри корпуса (защищен броней) и может выдвигаться в рабочее положение для определении координаты местонахождения ББМ, микроэлектронная система 9, управляющая механическими устройствами (на фиг. 2, 3, 4, 5, 6 не показана), и двигатель для обеспечения передвижения ББМ (колесный ход 11) и зарядки аккумуляторной батареи для действия электромоторов находится так же внутри корпуса, там же находится выдвигаемый пулемет и корпус пушки. Под днищем корпуса расположена перемещаемая ракетная установка.
При передвижении по дороге или бездорожью под управлением бойца размещение элементов ББМ показано на фиг. 3. Капсула 2 трансформируется для сидячего положения бойца с возможностью управления движением ББМ.
При перемещении ББМ в зоне боевых действий под управлением бойца размещение элементов ББМ показано на фиг. 4. Капсула 2 трансформируется для лежачего положения бойца с возможностью управления движением ББМ.
При необходимости фреза 14 отрывает траншею для ББМ и для капсулы (элементом 14.2), которая может находиться на удалении от ББМ. Эти операции могут быть выполнены заблаговременно, в т.ч. и ночью.
При ведении боевых действий боец находится в капсуле, которая заложена в подготовленную траншею, а ББМ находится в своей траншее или передвигается по местности. Расположение элементов ББМ показано на фиг. 5.
Управление ББМ может осуществляться следующим образом: автономное по программе, введенной в ЭВМ ББМ; ручное с центрального поста; полуавтоматическое с центрального поста с участием БЛА или без него; ручное бойцом из капсулы (по кабелю или радио); полуавтоматическое из капсулы с участием БЛА или без него (по кабелю или радио).
Связь между элементами внутри КП 1, внутри капсулы К 2, внутри ББМ 3, внутри БЛА 4, а также между перечисленными узлами 1, 2, 3, 4 показана на фиг. 6.
Работа устройства БЛА при управлении с КП происходит следующим образом.
Командир (на фиг. 1 - 6 не обозначен) с участием позиций 19, 40, 21, 41, 20, 42, 35, 52 воздействует на контроллер КонтрБЛА 38, который с участием связи 53 управляет фотокамерой КамБЛА 36 и с участием связи 54 -двигателями ДвБЛА 37. Ответные (контрольные) сигналы передаются в обратном направлении с участием тех же позиций.
Управление движением и вооружением и рытьем траншей ББМ с КП происходит с участием позиций 18, 39, 21, 41, 20, 42, 29, 46, 30; далее участвуют позиции 48 и 31, 49 и 32, 50 и 34, 51 и 33. Ответные (контрольные) сигналы передаются в обратном направлении с участием тех же позиций. Для наблюдения за противником и корректировки огня приходит информация с БЛА с участием пунктов 36, 53, 38, 52, 35, 42, 29, 46 на ЭВМм 30. Управление и контроль за БЛА и ББМ может осуществлять и боец с участием пунктов 24, 44, 25, 42 и т.д. Система управления может работать и в автономном режиме по программе, записанной в ЭВМм. В этом случае будет полезным использование ГЛОНАСС пункты 27,45 и 28; а при управлении бойцом - пункт 26.
Главным достоинством ББМ является исключение потерь среди личного состава при проведении боевых действий при штурме террористов на укрепленных позициях (в помещениях, в траншеях и огневых точках на местности, в лесном массиве и т.д.).
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ автоматического наведения орудия на цель | 2019 |
|
RU2728292C1 |
| СПОСОБ НАВЕДЕНИЯ ОРУДИЯ НА ЦЕЛЬ | 2020 |
|
RU2743597C1 |
| СИСТЕМА ДИСТАНЦИОННОГО УПРАВЛЕНИЯ САМОЗАРЯДНОЙ ВИНТОВКОЙ | 2019 |
|
RU2723700C1 |
| ПОДВОДНАЯ БЕСПИЛОТНАЯ РАКЕТНАЯ СИСТЕМА | 2019 |
|
RU2710039C1 |
| СПОСОБ НАВЕДЕНИЯ НА ЦЕЛЬ РЕАКТИВНОЙ СИСТЕМЫ | 2020 |
|
RU2753940C1 |
| СПОСОБ ПОРАЖЕНИЯ ПОДВИЖНЫХ ЦЕЛЕЙ | 2020 |
|
RU2746235C1 |
| Устройство для дистанционной стрельбы | 2024 |
|
RU2839417C1 |
| СПОСОБ УПРАВЛЕНИЯ БЕСПИЛОТНОЙ ПОДВОДНОЙ ЛОДКОЙ И УСТРОЙСТВА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2020 |
|
RU2766639C1 |
| СПОСОБ ПОРАЖЕНИЯ ЛЕТЯЩЕГО ПЕРЕМЕННЫМ КУРСОМ И ВЫСОТОЙ ОБЪЕКТА | 2020 |
|
RU2741133C1 |
| ПУСКОВОЕ УСТРОЙСТВО ЗАПУСКА БОЕВОЙ РАКЕТЫ ИЗ ПОДВОДНОГО ПОЛОЖЕНИЯ | 2021 |
|
RU2759525C1 |
Дистанционное управление движением и вооружением беспилотной боевой машиной осуществляется за счет рычагов и механических устройств управления. Внутри броневого корпуса предусмотрены механические устройства, которые приводятся в действие электродвигателями, управление которыми осуществляется посредством бортовой ЭВМ, которая может получать информацию с жесткого диска о трассе маршрута движения, скорости движения в любой момент времени, управлять пушкой (заряжать орудие, наводить на цель, производить выстрел в заданный момент времени с учетом непрерывно измеряемых параметров воздействия на полет снаряда, отслеживания точки попадания и коррекции наведения орудия на цель), управлять пулеметом и ракетной установкой, управлять рытьем траншеи для скрытного размещения капсулы и рытьем траншеи для скрытного размещения боевого устройства. Сокращаются потери среди личного состава при проведении боевых действий при штурме террористов на укрепленных позициях. 2 н.п. ф-лы, 6 ил.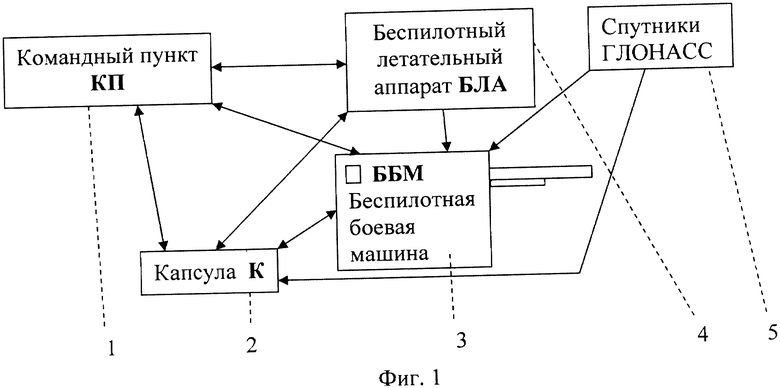
1. Беспилотная боевая машина, содержащая рычаги и другие механические устройства управления, отличающаяся тем,
что дополнительно внутри бронированного корпуса машины предусмотрены механические устройства, которые приводятся в действие электродвигателями, управление которыми осуществляется посредством бортовой ЭВМ, которая выполнена с возможностью:
во-первых, получения информации с флэш-памяти о конфигурации маршрута движения в любой момент времени,
управления пушкой, включающего: заряжение орудия, наведение на цель, произведение выстрела в заданный момент времени с учетом непрерывно изменяемых параметров воздействия на полет снаряда, отслеживание точки попадания и коррекции наведения орудия на цель,
управления пулеметом и ракетной установкой по аналогии с пушкой,
управления рытьем траншеи для скрытного размещения капсулы и рытьем траншеи для скрытного размещения боевого устройства;
во-вторых, проведения тех же действий с учетом местонахождения боевого устройства, которое определяется с участием ГЛОНАСС;
в-третьих, проведения тех же действий дополнительно с учетом перемещения цели по сигналам беспилотного летательного аппарата;
в-четвертых, проведения тех же действий с коррекцией любой операции бойцом, находящимся в капсуле, или командира с командного пункта.
2. Система дистанционного управления движением и вооружением беспилотной боевой машины (ББМ), состоящая из системы ГЛОНАСС, беспилотного летательного аппарата (БЛА), беспилотной боевой машины, отличающаяся тем, что
дополнительно имеет командный пункт (КП), капсулу (К), электронные и электромеханические устройства ББМ, управляющие и контрольные устройства регулирования движением и управления вооружением, размещенные в командном пункте,
содержащем пульт управления и контроля (ПУКм) для ББМ, пульт управления и контроля (ПУКа) для БЛА, ЭВМ центрального поста (ЭВМц), радиостанцию (РСц) для связи командного пункта с капсулой, ББМ и БЛА, радиотелефон для связи командного пункта с капсулой;
капсула содержит пульт управления и контроля (ПУКо) ББМ и БЛА, радиостанцию (РСкам) для связи капсулы с командным пунктом, БЛА и ББМ, приемник ГЛОНАСС (ПРкг);
ББМ содержит радиостанцию (РСкка) для связи ЭВМм с командным пунктом, БЛА, капсулой, приемник для приема сигналов ГЛОНАСС (ПРмг), ЭВМм для воздействия и контроля за управлением устройствами, которые воздействуют на двигатель и электромоторы, рулевое управление, вооружение, земляные фрезы;
БЛА содержит радиостанцию (РСо) для связи с командным пунктом, капсулой и ББМ, контроллер (КонтрБЛА) для управления и контроля двигателями (ДвБЛА) и камерой (КамБЛА).
| СПОСОБ ПОЛУЧЕНИЯ СЕРЫ КАТАЛИТИЧЕСКИМ ОКИСЛЕНИЕМ СЕРОВОДОРОДА | 2012 |
|
RU2533140C2 |
| МНОГОЦЕЛЕВОЕ ПРОТИВОТАНКОВОЕ (ЗЕНИТНОЕ) СРЕДСТВО | 2011 |
|
RU2492402C2 |
| КОТЛОВАННАЯ МАШИНА | 2011 |
|
RU2485253C1 |
| СИСТЕМА И СПОСОБ УПРАВЛЕНИЯ ГУСЕНИЧНЫМ ТРАНШЕЙНЫМ ЭКСКАВАТОРОМ | 1995 |
|
RU2141907C1 |

