Область техники, к которой относится изобретение
Изобретение относится к области военной технике и может быть использовано для уничтожения живой силы и техники противника.
Уровень техники
Известен способ стрельбы из винтовки, который имеет узлы, размещенные в выемке на поверхности ландшафта, в которые входит винтовка, стационарная ЭВМ и радиостанция, устройства наведения винтовки на цель и осуществление выстрела, блок электропитания, соединительные провода; наблюдательный пункт для корректировщика стрельбы с мобильным управляющим устройством, содержащим ЭВМ, радиостанцию, блок электропитания, которые электрическими проводами связаны между собой; отличающийся тем, что
выемка на поверхности ландшафта накрыта броневым щитком, под которым размещено электромеханическое устройство для воздействия на спусковой крючок, подъемный и поворотный механизмы для наведения винтовки на цель;
электромеханические устройства с помощью электрических проводов соединены со стационарной ЭВМ;
мобильное управляющее устройство имеет рычаги, которые воздействуют на мобильную ЭВМ, которая с участием мобильной и стационарной радиостанций и стационарной ЭВМ осуществляет наведение винтовки на цель, а впоследствии корректировщик, наблюдая за полетом трассирующей пули, изменяет траекторию полета пуль следующих выстрелов;
наведение винтовки на цель осуществляется корректировщиком, который наблюдает через бинокль или перископ за полетом пуль в направлении цели и дистанционно наводит винтовку точно в цель;
на винтовке нет прицела, мушки и оптических приборов наведения на цель;
дистанционное управление винтовкой делает присутствие бойца на поле боя более безопасным;
корректировщик может осуществлять наведение одной или нескольких винтовок поочередно на одну и ту же или разные цели, создавая эффект присутствия нескольких бойцов;
присутствие на поле боя нескольких корректировщиков управляющими одними и теми же или разными огневыми точками существенно повышает боеспособность подразделения, участвующего в обстреле целей. [Патент 271015 Способ стрельбы из винтовки, Полевой Ю.И. Опубликовано: 18.03.2020. Бюл. №8].
Недостатком способа является то, что наведение винтовки на цель является достаточно трудоемким процессом, требует большой сноровки, сосредоточенности и выполняется достаточно медленно.
Известна система дистанционного управления движением и вооружением беспилотной боевой машины ББМ, состоящая из устройств ГЛОНАСС, беспилотного летательного аппарата БЛА беспилотной боевой машины ББМ, отличающаяся тем, что
дополнительно имеется командный пункт, капсула, электронные и электромеханические устройства ББМ, управляющие и контролирующие устройства регулирования движения и управления вооружением, размещенные в командном пункте;
содержит пульт управления и контроля для ББМ, пульт управления и контроля для БЛА, ЭВМ центрального поста, радиостанцию для связи командного пункта с капсулой, ББМ и БЛА, радиотелефон для связи командного пункта с капсулой;
капсула содержит пульт управления и контроля ББМ и БЛА, радиостанцию для связи капсулы с командным пунктом, БЛА и ББМ, приемник ГЛОНАСС;
ББМ содержит радиостанцию для связи ЭВМ с командным пунктом, БЛА, капсулой, приемник для приема сигналов ГЛОНАСС, ЭВМ для воздействия и контроля за управлением устройствами, которые воздействуют на двигатель и электромоторы, рулевое управление, вооружение, земляные фрезы;
БЛА содержит радиостанцию для связи с командным пунктом, капсулой и ББМ, контроллер для управления и контроля двигателями и фотокамерой [Патент 2671138 Беспилотная боевая машина и система дистанционного управления движением и вооружением беспилотной боевой машиной (второй пункт формулы), Полевой Ю.И. Опубликовано: 29.10.2018. Бюл. №31].
Недостатком известной система является то, что наведение орудия на цель выполняет человек, который самостоятельно оценивает влияние атмосферных условий на полет снаряда и наводит орудие на новую цель, что занимает значительное время, обстрел позиций противника на большем расстоянии, особенно реактивными снарядами, является мало эффективным, т.к. точность попадания невысока, и такой обстрел используется при залповом огне (одновременные или поочередные выстрелы из орудия с небольшим интервалом).
Данное изобретение выбрано в качестве прототипа.
Раскрытие изобретения
Техническим результатом является повышение точность стрельбы и скорострельности реактивной системы, сокращение количества бойцов на поле боя.
Способ наведения на цель реактивной системы PC, основанный на использовании ЭВМ, устройства наведения УН, беспилотного летательного аппарата БЛА, пульта управления ПУ реактивной системой и беспилотным летательным аппарата, радиостанцией РСТ для связи PC с БЛА, фотокамеры ФК на БЛА, заключающийся в том, что по информации с БЛА, передаваемой с помощью РСТ о местонахождении целей Ц, УН с участием ЭВМ наводит PC на Ц, отличающийся тем, что
PC используется для ближнего боя (1-2 км), что существенно повышает точность попадания в цель;
для повышения точности попадания в Ц PC осуществляет пристрелочный выстрел реактивным снарядом РСН, вес и размеры которого соответствуют боевому, при разрыве пристрелочного РСН появляется дымовое облако ДО, координаты которого фиксируют с помощью ФК и с участием РСТ передают на PC, кроме того на ЭВМ непрерывно передают информация и о координатах других Ц,
по координатам ДО и Ц, по которой был произведен выстрел, ЭВМ определяет поправки, с учетом которых осуществляют другие выстрелы, рассчитанные поправки позволяют учесть влияние ветра, плотность воздуха и др. атмосферные воздействия, а также разницу между горизонтом расположения PC и Ц;
перед каждым выстрелом, если выбран первый режим обстрела, по инициативе бойца PC наводится на следующую Ц и производится очередной выстрел, если выбран второй режим обстрела, то боец указкой на сенсорном экране с электронной картой поля боя отмечает Ц, подлежащие уничтожению, и дает команду на уничтожение целей;
первый режим обстрела может быть применен по неподвижным и подвижным Ц, второй по неподвижным.
Краткое описание чертежей
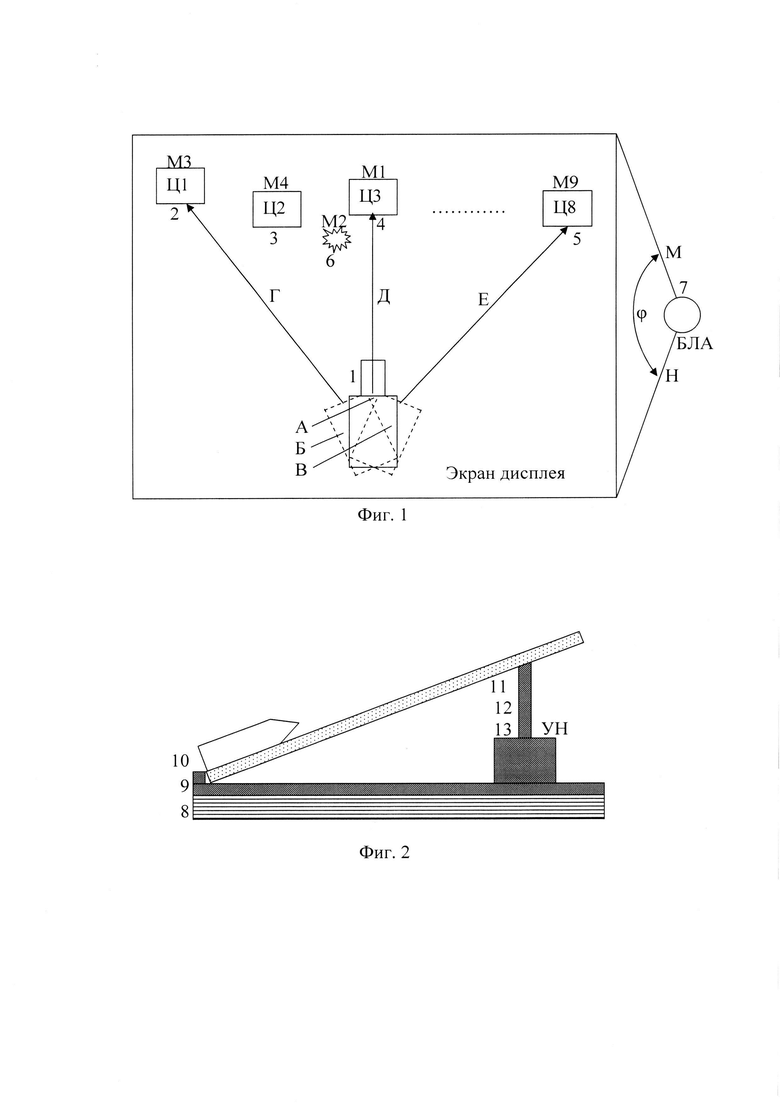
На фиг. 1 представлен фрагмент поля боя; на фиг. 2 показан фрагмент конструкции ракетной системы.
Осуществление изобретения
На фиг. 1 и 2 показаны следующие условные обозначения:
1 - реактивная система (боевая машина БМ13 «КАТЮША») PC;
2, 3, 4, … 5 - первая, вторая, третья, …, восьмая (Ц1, Ц2, Ц3, …, Ц8) цели;
6 - место разрыва пристрелочного снаряда;
7 - беспилотный летательный аппарат БЛА;
8 - неподвижная платформа на ракетной системе (жестко соединена с шасси);
9 - подвижная (вращающаяся) платформа;
10 - реактивный снаряд;
11 - наклонная направляющая для запуска реактивных снарядов;
12 - подъемный шток;
13 - подъемно поворотный механизм;
А, Б, В - положения подвижной платформы;
Г, Д, Е - направления полета РСН на Ц1, Ц3, Ц8;
М, Н - точки на линиях угла охвата ф, при котором поле боя проектируется на экран дисплея ЭВМ;
M1, М2, М3, М4, …, М9 - первая, вторая, третья, четвертая, …, девятая метки на экране дисплея, которые наносит боец;
Ц1, Ц2, Ц3, …Ц8 - первая, вторая, третья, …, восьмая цели.
Условные обозначения в тексте заявки и формуле изобретения:
БЛА - беспилотный летательный аппарат;
ДО - дымовое облако;
ПУ - пульт управления;
PC - реактивная система;
РСН - реактивный снаряд;
РСТ - радиостанции на PC и БЛА;
УН - устройство наведения;
ФК - фотокамера на БЛА;
Ц - цель;
ЭВМ - электронно-вычислительная машина.
Целью разработки, предложенного технического решения, является повышение точность стрельбы и скорострельности системы отражения атаки противника, сокращения количества военнослужащих на поле боя, уменьшение стоимости компонентов реактивного снаряда из-за снижения требуемой дальности полета снаряда.
Способ наведения на цель реактивной системы PC 1, основанный на использовании ЭВМ, устройства наведения УН, беспилотного летательного аппарата БЛА 7, пульта управления ПУ реактивной системой 1 и беспилотным летательным аппарата 7. Для связи PC 1 с БЛА 7 используются радиостанции РСТ. Для отображения ситуации на поле боя предусмотрены фотокамера ФК на БЛА 7 и монитор ЭВМ. УН с участием ЭВМ по команде бойца наводит PC 1 на цели Ц1, Ц2, Ц3, …, Ц8 (2, 3, 4, …5).
PC 1 используется для ближнего боя (1-2 км), что существенно повышает точность попадания в цель. Для повышения точности стрельбы с PC 1 осуществляет пристрелочный выстрел реактивным снарядом РСН, вес и размеры которого соответствуют боевому снаряду, при разрыве пристрелочного РСН появляется дымовое облако ДО 6, координаты которого фиксируются с помощью ФК и с помощью РСТ передаются на PC. На ЭВМ непрерывно передается информация и о координатах всех целей Ц,
По координатам ДО 6 и первой пристрелочной цели Ц3 4, ЭВМ определяет поправки, с учетом которых выполняются другие выстрелы, рассчитанные поправки позволяют учесть влияние ветра, плотность воздуха и др. атмосферные воздействия, а так же разницу между горизонтом расположения PC и Ц;
перед каждым выстрелом, если выбран первый режим обстрела, по инициативе бойца PC 1 наводится на следующую цель и производится очередной выстрел, если выбран второй режим обстрела, то боец указкой на сенсорном экране ЭВМ с электронной картой поля боя отмечает Ц, подлежащие уничтожению, и дает команду на уничтожение целей;
первый режим обстрела может быть применен по неподвижным и подвижным Ц, второй по неподвижным.
Независимо от выбранного режима обстрела сначала осуществляется пристрелочный выстрел: боец на электронной карте отмечает указкой Ц 4 - наносит метку M1, дает команду на выстрел, отмечает указкой ДО 6 - наносит метку М2, по координатам M1 и М2 ЭВМ определяет поправку для осуществления следующих выстрелов. При первом режиме обстрела боец отмечает следующую цель, например Ц1 (метка М3), ЭВМ с участием устройства наведения УН наводит PC на цель и дает команду на выстрел (без участия бойца). При втором режиме обстрела аналогично осуществляется пристрелочный выстрел, затем боец отмечает другие цели (Ц1, Ц2, … Ц8), нанося метки М3, М4, …, М9, нажимает на кнопку ПУСК (на фиг. не показана), PC поочередно наводится на отмеченные цели и производит их обстрел.
УН выполняет две функции по информации от ЭВМ: поворачивает подвижную платформу 9 (положения А, Б, В) относительно неподвижной платформы 8, наводя платформу 9 на цель (стрелки Г, Д, Е), и устанавливает подъемный шток 12 на высоту, соответствующую расстоянию от PC до Ц, т.е. располагает наклонную направляющую 11 так, чтобы РСН летел в сторону Ц, а атмосферные условия и разница между горизонтами расположения PC и Ц учитываются в поправке, которая определяется по пристрелочному выстрелу.
ПУ (на фиг. 1 и 2 не представлен) позволяет бойцу управлять PC 1 и БЛА 7, ФК и РСТ позволяют зафиксировать и передать информацию о ситуации на поле боя на ЭВМ,
Способ наведения на цель реактивной системы, при котором используют ЭВМ, устройства наведения, беспилотный летательный аппарат, (БЛА) пульт управления реактивной системой и беспилотным летательным аппаратом, радиостанцию для связи реактивной системы с БЛА, фотокамеру на БЛА. Для повышения точности попадания осуществляют пристрелочный выстрел реактивным снарядом, вес и размеры которого соответствуют боевому, фиксируют координаты дымового облака. По результату первого выстрела определяют с помощью ЭВМ поправки в вертикальной и горизонтальной плоскости и осуществляют наведение орудия на цели с учетом атмосферных возмущений (ветер, осадки, плотность воздуха и др.). Перед каждым выстрелом с участием ЭВМ устройства наведения реактивная система наводится на цель. Технический результат - повышение точности стрельбы и сокращение времени наведения на цель. 2 ил.
Способ наведения на цель реактивной системы PC, основанный на использовании ЭВМ, устройства наведения УН, беспилотного летательного аппарата БЛА, пульта управления ПУ реактивной системой и беспилотным летательным аппарата, радиостанции РСТ для связи PC с БЛА, фотокамеры ФК на БЛА, заключающийся в том, что по информации с БЛА, передаваемой с помощью РСТ о местонахождении целей Ц, УН с участием ЭВМ наводит PC на Ц, отличающийся тем, что PC используется для ближнего боя (1-2 км), что существенно повышает точность попадания в цель; для повышения точности попадания в Ц PC осуществляет пристрелочный выстрел реактивным снарядом РСН, вес и размеры которого соответствуют боевому, при разрыве пристрелочного РСН появляется дымовое облако ДО, координаты которого фиксируют с помощью ФК и с помощью РСТ передают на PC, кроме того на ЭВМ непрерывно передается информация и о координатах других Ц, по координатам ДО и Ц, по которой был произведен выстрел, ЭВМ определяет поправки, с учетом которых осуществляются другие выстрелы, рассчитанные поправки позволяют учесть влияние ветра, плотность воздуха и др. атмосферные воздействия, а так же разницу между горизонтом расположения PC и Ц; перед каждым выстрелом, если выбран первый режим обстрела, по инициативе бойца PC наводится на следующую Ц и производится очередной выстрел, если выбран второй режим обстрела, то боец указкой на сенсорном экране с электронной картой поля боя отмечает Ц, подлежащие уничтожению, и дает команду на уничтожение целей; первый режим обстрела может быть применен по неподвижным и подвижным Ц, второй по неподвижным.
| СПОСОБ ПРИСТРЕЛКИ ЦЕЛИ С ИСПОЛЬЗОВАНИЕМ КВАДРОКОПТЕРА | 2016 |
|
RU2642554C1 |
| US 9234728 B2, 12.01.2016 | |||
| Способ автоматического наведения орудия на цель | 2019 |
|
RU2728292C1 |
| СПОСОБ СТРЕЛЬБЫ ИЗ АРТИЛЛЕРИЙСКОГО ОРУДИЯ И АРТИЛЛЕРИЙСКАЯ СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2006 |
|
RU2319100C2 |
| RU 2007138323 A, 27.04.2009 | |||
| GB 1301041 A, 29.12.1972 | |||
| US 10866065 B2, 15.12.2020 | |||
| US 4315609 A1, 16.02.1982 | |||
| Способ пристрелки цели с использованием специального реактивного снаряда | 2019 |
|
RU2715466C1 |

