Изобретение относится к области автоматического анализа изображений, а именно к устройствам и способам каскадной обработки потока изображений с помощью сверточных нейронных сетей, и может быть использовано в системах видеонаблюдения для автоматического определения значимых событий в поле зрения видеокамеры.
Известны способы автоматического анализа изображений [1], которые позволяют выделять движущиеся объекты в поле зрения видеокамеры и использовать при этом сравнительно малопроизводительные вычислительные устройства. В данных способах, как правило, строят модель неподвижной сцены, сравнивают каждый новый кадр видеопотока с построенной моделью и выделяют различия нового кадра и неподвижной сцены. Как правило, выделяют не только движущиеся объекты, но и шум, обусловленный влиянием множества помех: движением нежестких объектов сцены на ветру, переменной освещенностью сцены вследствие влияния внешних движущихся осветителей и переменной облачности. В большинстве случаев к помехам относят движение животных, птиц, насекомых в непосредственной близости от видеокамер. Таким образом, быстродействующие разностные методы определения движущихся объектов имеют проблему различения помех на изображении.
В последнее время для анализа изображений применяют аппарат сверточных нейронных сетей [2, 3], с помощью которого можно отличить события от помех. Однако достоверные результаты анализа изображений на основе нейронных сетей достижимы только с помощью вычислительных устройств с высокой вычислительной мощностью, и для адаптации нейронных сетей к фильтрации помех требуется огромный набор изображений, на которых нейросеть будет обучаться. Объем таких изображений по порядку величины составляет десятки миллионов отдельных картинок, принадлежащих разным сценам, полученным в разных условиях съемки - климатических, географических, временных.
Методы обработки изображений, которые фиксируют изменения на наблюдаемой сцене, известны достаточно давно, при этом недостатки этих методов тоже хорошо изучены [4]. Не смотря на относительно невысокие требования к вычислительной мощности исполнительных устройств, практически каждый метод определения движения обладает следующим главным недостатком: как правило, фиксирует в том числе и такие изменения на сцене, которые не представляют интереса с точки зрения назначения систем видеонаблюдения. К изменениям-помехам относятся: изменение освещенности вследствие переменной облачности или вследствие включения, выключения, движения искусственных источников света, движение объектов сцены из-за ветра, движение теней объектов, движение животных, птиц и насекомых, изменение сцены вследствие хозяйственной деятельности коммунальных служб (уборка, ремонт) и т.д. Классификация всех возможных помех с помощью простых алгоритмических подходов является затруднительной, поэтому предпочтительным является метод обработки изображений с помощью нейронных сетей, которые выполняют классификацию изображений событий, и в результате определяют, является ли изменение изображения помехой или событием, на которое необходимо обращать внимание.
Анализ уровня техники показывает, что до сих пор аппарат нейронных сетей не применяют в полной мере в охранных системах видеонаблюдения. Этому способствует три фактора.
Во-первых, обработку с помощью нейронных сетей успешно осуществляют для изображений с высоким разрешением, а в охранных системах видеонаблюдения, как правило, требуется фиксировать события на изображениях с низким разрешением, поскольку в охранных системах видеонаблюдения стремятся использовать как можно меньше камер, а для этого выбирают объективы видеокамер с широкими углами зрения. Даже переход на видеокамеры высокого разрешения не снижает требования к способности обработки изображений с невысоким разрешением: увеличение разрешения сенсора видеокамеры приводит к тому, что угол обзора видеокамеры увеличивают для того, чтобы использовать как можно меньшее число камер для зоны наблюдения с той же площадью, и в итоге на изображение событий, которые должна выделять система видеонаблюдения, приходится примерно такое же число точек изображения.
Во-вторых, для обучения нейронных сетей требуется, как отмечалось выше, многомиллионный набор изображений. Большинство современных нейронных сетей настраивают на общедоступных базах изображений (например, базах ImageNet, CIFAR, PASCAL и др.), а в них представлены изображения с высоким разрешением, и не представлены изображения с низким разрешением, поэтому попытка применить современные наработки напрямую не дает хороших результатов по достоверности. При этом процесс сбора видеоданных (набора изображений) из действующих систем видеонаблюдения для настройки нейросетей сопряжен с юридическими и организационными проблемами, что затрудняет получение больших наборов изображений с низким разрешением, необходимый для настройки нейронной сети.
В-третьих, операция по обработке одного изображения с помощью эффективных нейронных сетей составляет несколько терафлопов, поскольку нейросети, обладающие высокой достоверностью по определению событий, являются многоуровневыми и состоят из большого числа нейронов. Количество весов у типичной нейронной сети, предназначенной для определения изображений конкретного типа, составляет несколько десятков миллионов чисел. Из-за высоких требований к вычислительным устройствам применение обработки изображений на основе современных сверточных нейронных сетей пока экономически не оправдано в крупных системах видеонаблюдения с большим количеством видеокамер.
Известны устройство и способ [5] обработки изображений с помощью сверточной нейронной сети, в которых классифицируют объект на изображении с помощью сверточной нейронной сети.
Недостатком устройства и способа-прототипа является большая аппаратная вычислительной мощность устройства, требуемая для классификации объекта с помощью только сверточной нейронной сети без использования быстрых методов обработки изображения до этапа обработки сверточной нейронной сетью.
Техническим результатом заявленного изобретения является создание устройства и способа каскадной обработки потока изображений с помощью сверточной нейронной сети с улучшенной достоверностью автоматического определения движущихся объектов в поле зрения видеокамеры, без увеличения аппаратной вычислительной мощности устройства, за счет применения каскада из быстрого метода определения движущихся объектов и метода нейросетевой обработки.
То есть заявленные устройство и способ являются столь же быстродействующими, как известный из уровня техники способ определения движущихся объектов на основе сопоставления с фоновой моделью сцены. При этом в заявленном изобретении также применяется метод настройки нейросети на данных сравнительно небольшого объема.
Поставленный технический результат выполнен путем создания устройства каскадной обработки потока изображений с помощью сверточной нейронной сети, содержащего блок определения движения, соединенный с блоком нейросетевой фильтрации, который содержит блоки определения обобщенных признаков и блок принятия решения, при этом блок определения движения соединен параллельно со входами блоков определения обобщенных признаков, выходы которых соединены с первым входом блока принятия решения, второй вход которого соединен с выходом блока определения движения, причем
- блок определения движения выполнен с возможностью получения на входе потока изображений, с возможностью определения положения фрагментов изображений с движущимися объектами на последовательных кадрах и передачи информации о положении фрагментов изображений с движущимися объектами в блоки определения обобщенных признаков, а также с возможностью определения характеристик движущихся объектов и передачи их в блок принятия решения;
- блоки определения обобщенных признаков выполнены с возможностью получения на входе потока изображений и информации о положении фрагментов изображений с движущимися объектами, с возможностью параллельной обработки фрагментов изображений с движущимися объектами на серии последовательных кадров и определения обобщенных признаков движущихся объектов с помощью каскада из сверток и нелинейных преобразований посредством сверточной нейронной сети, а также с возможностью передачи обобщенных признаков в
- блок принятия решения, который выполнен с возможностью обработки обобщенных признаков и характеристик движущихся объектов, при этом принятия решения о том, являются движущиеся объекты помехами или действительными объектами.
В предпочтительном варианте осуществления устройства блок определения движения выполнен с возможностью определения характеристик движущихся объектов, таких как текстура и траектория движения.
В предпочтительном варианте осуществления устройства блок принятия решений состоит из последовательности полносвязных слоев.
В предпочтительном варианте осуществления устройства в каждом из параллельных блоков определения обобщенных признаков веса сверток выполнены с возможностью предварительной настройки с помощью большого количества изображений из открытых источников, а затем тонкой настройки на тех изображениях, с которыми предстоит работать в качестве исходных изображений потока.
В предпочтительном варианте осуществления устройства сверточная нейронная сеть адаптирована для изображений низкого разрешения.
Поставленный технический результат выполнен также путем создания способа каскадной обработки потока изображений с помощью сверточной нейронной сети, в котором
- с помощью блока определения движения получают на входе поток изображений, определяют положения фрагментов изображений с движущимися объектами на последовательных кадрах и передают информациию о положении фрагментов изображений с движущимися объектами в блоки определения обобщенных признаков, а также определяют характеристики движущихся объектов и передают их в блок принятия решения;
- с помощью блока определения обобщенных признаков получают на его входе поток изображений и информацию о положении фрагментов изображений с движущимися объектами, параллельно обрабатывают фрагменты изображений с движущимися объектами на серии последовательных кадров и определяют обобщенные признаки движущихся объектов с помощью каскада из сверток и нелинейных преобразований посредством сверточной нейронной сети, а также передают обобщенные признаки в
- блок принятия решения, с помощью которого обрабатывают обобщенные признаки и характеристики движущихся объектов, при этом принимают решение о том, являются движущиеся объекты помехами или действительными объектами.
В предпочтительном варианте осуществления способа определяют характеристики движущихся объектов, такие как текстура и траектория движения.
В предпочтительном варианте осуществления способа блок принятия решений состоит из последовательности полносвязных слоев.
В предпочтительном варианте осуществления способа с помощью каждого из параллельных блоков определения обобщенных признаков с помощью весов сверток осуществляют предварительную настройку, используя большое количество изображений из открытых источников, а затем тонкую настройку на тех изображениях, с которыми предстоит работать в качестве исходных изображений потока.
В предпочтительном варианте осуществления способа сверточная нейронная сеть адаптирована для изображений низкого разрешения.
Для лучшего понимания заявленного изобретения далее приводится его подробное описание с соответствующими графическими материалами.
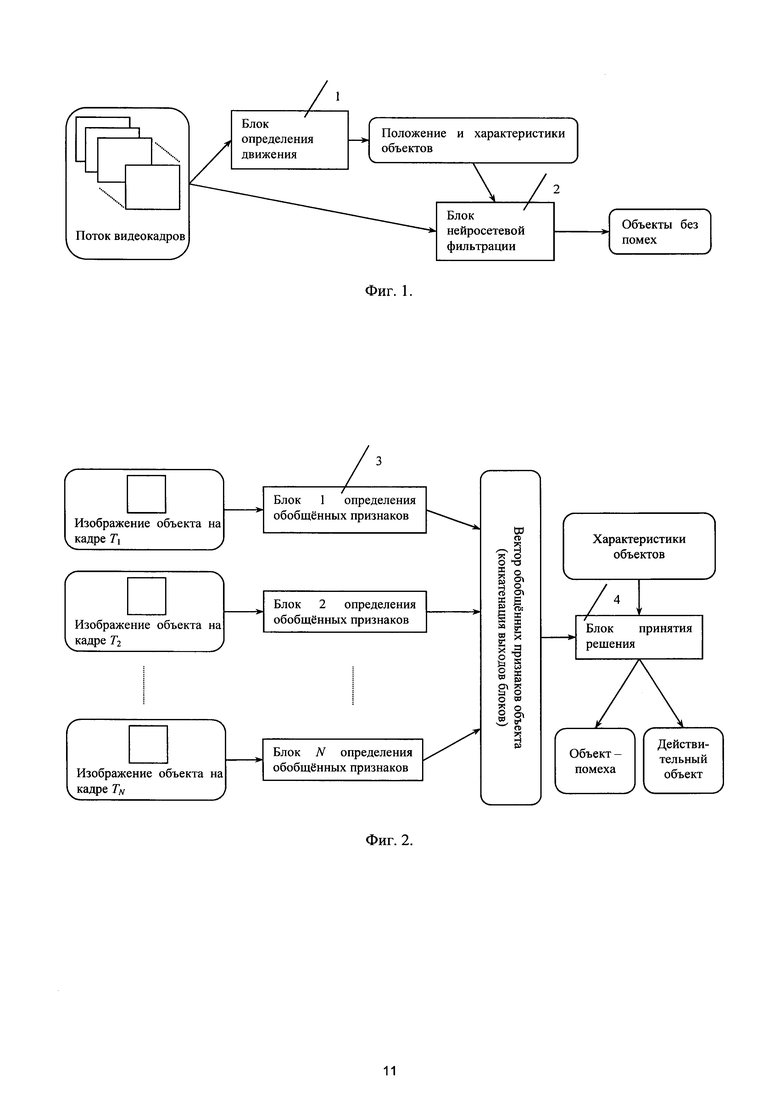
Фиг. 1.
Элементы:
1 - блок определения движения;
2 - блок нейросетевой фильтрации;
3 - блоки определения обобщенных признаков;
4 - блок принятия решения.
Рассмотрим более подробно функционирование заявленных устройства и способа каскадной обработки потока изображений, представленных на фиг. 1 и 2.
Обработку потока изображений осуществляют два основных блока, блок 1 определения движения и блок 2 нейросетевой фильтрации. Блок 1 определения движения осуществляет первичное определение движущихся объектов с помощью быстрого типа обработки изображений. Дополнительно блок 1 определения движения вычисляет различные характеристики объекта, описывающие его текстуру и траекторию, блок 2 нейросетевой фильтрации функционирует на основе нейросети, имеющей архитектуру. Блок 2 нейросетевой фильтрации состоит из блоков 3 определения обобщенных признаков объектов с помощью каскада из сверток и нелинейных преобразований, и блока 4 принятия решения, состоящего из некоторой последовательности полносвязных слоев. В качестве входа блок 4 принятия решения принимает на вход помимо обобщенных признаков, определенных с помощью каскада сверток, свойства объектов, вычисленных блоком 1 определения движения.
Блоки 3 определения обобщенных признаков соединены параллельно и применяются к изображениям объекта на последовательных кадрах потока изображений. При такой структуре нейросети сначала производят предварительную настройку весов сверток в каждом из параллельных блоков 3 с помощью изображений из открытых источников с большим количеством примеров, а затем производят тонкую настройку на тех изображениях, с которыми предстоит работать в системах видеонаблюдения. Тем самым решается проблема набора большого количества примеров изображений.
За счет того, что нейросеть ориентирована на изображения малого разрешения, количество весов в нейронах в ней может быть существенно меньше, чем в нейросетях, предназначенных для обработки изображений высокого разрешения. Кроме того, нейросеть применяют не для каждого фрагмента изображения, а только для каждого потенциального объекта, который выделят блок 1 определения движения. Отсюда следует, что блок 2 нейросетевой фильтрации функционирует с существенно более низкой частотой, чем частота обработки кадров, и поэтому применение такого блока не повышает существенно уровень требований к вычислительной мощности исполнительных устройств.
Применяемый в заявленном изобретении каскад из блока 1 определения движения и блока 2 нейросетевой фильтрации позволяет, с одной стороны, существенно сократить время обработки изображений блоком 2 нейросетевой фильтрации, поскольку нейросеть применяется не к каждому фрагменту изображения по методу сканирующего окна с перебором масштаба, а лишь к тем фрагментам, которые выдает блок 1 определения движения, а с другой стороны, существенная доля ошибок нейросетей при классификации изображений компенсируется тем, что на ее вход подают не все множество фрагментов кадра изображения, а только те фрагменты, которые могут потенциально представлять интерес. Применение данного каскада стало возможным благодаря отличительным свойствам архитектуры нейронной сети, представленной на фиг. 2. Во-первых, применение отдельных блоков 3 определения обобщенных признаков к каждому кадру изображения позволяет формировать признаки с учетом особенностей движения объектов: зачастую понять, является ли изображение низкого разрешения помехой, можно только с помощью наблюдения за изображением на последовательных кадрах. Во-вторых, использование отдельных блоков 3 определения обобщенных признаков позволяет производить их предварительную настройку на большом объеме данных из открытых баз данных изображений, и затем производить тонкую настройку нейронной сети на данных ограниченного объема, полученных в процессе реальной эксплуатации видеосистем. В-третьих, поскольку в системах видеонаблюдения требуется обрабатывать в том числе изображения низкого разрешения, используемые в заявленном изобретении сверточные нейронные сети для формирования обобщенных признаков адаптированы к изображениям малого разрешения, и за счет этого используют меньше вычислительных операций, чем известные нейросети для обработки изображений. В-четвертых, блок 4 принятия решения помимо обобщенных признаков, сформированных блоками 3 сверточных нейронных сетей, использует также характеристики траектории и текстуры объектов, которые предоставлет блок 1 определения движения, что существенно повышает достоверность классификации изображений по категориям «действительный объект» или «помеха».
Как и любая архитектура нейронной сети, заявленная архитектура допускает дополнительную тонкую настройку на конкретных сценах, которые контролируются системами видеонаблюдения, с помощью так называемой процедуры дообучения на новых изображениях, с целью повышения достоверности фильтрации помех.
Быстродействие заявленных устройства и способа достигается за счет каскадирования двух блоков, блока определения движения и блока нейросетевой фильтрации.
Хотя описанный выше вариант выполнения изобретения был изложен с целью иллюстрации заявленного изобретения, специалистам ясно, что возможны разные модификации, добавления и замены, не выходящие из объема и смысла заявленного изобретения, раскрытого в прилагаемой формуле изобретения.
СПИСОК ЛИТЕРАТУРЫ
1. N. Goyette, Р.-М. Jodoin, F. Porikli, J. Konrad, and P. Ishwar, changedetection.net: A new change detection benchmark dataset, in Proc. IEEE Workshop on Change Detection (CDW-2012) at CVPR-2012, Providence, RI, 16-21 Jun., 2012.
2. Krizhevsky A., Sutskever I., Hinton G.E. Imagenet classification with deep convolutional neural networks // Advances in neural information processing systems. - 2012. - C. 1097-1105.
3. Redmon J. et al. You only look once: Unified, real-time object detection // Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition. - 2016. - C. 779-788.
4. Сравнение методов разностного выделения движущихся объектов, http://www.changedetection.net, дата обращения 14.03.2017.
5. US 2016140424 (A1), 19.05.2016, Object-centric Fine-grained Image Classification.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ распознавания объектов в системе видеонаблюдения | 2022 |
|
RU2788301C1 |
| УСТРОЙСТВО ДЛЯ ПОСТРОЕНИЯ КАРТЫ ГЛУБИНЫ В НЕПЛОТНЫХ СРЕДАХ | 2023 |
|
RU2805009C1 |
| Интеллектуальная система выявления и прогнозирования событий на основе нейронных сетей | 2021 |
|
RU2797748C2 |
| СПОСОБ УПРАВЛЕНИЯ ДВИЖУЩИМСЯ ОБЪЕКТОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2476825C2 |
| СПОСОБ АУДИОВИЗУАЛЬНОГО РАСПОЗНАВАНИЯ СРЕДСТВ ИНДИВИДУАЛЬНОЙ ЗАЩИТЫ НА ЛИЦЕ ЧЕЛОВЕКА | 2022 |
|
RU2791415C1 |
| СПОСОБ СОЗДАНИЯ КОМБИНИРОВАННЫХ КАСКАДОВ НЕЙРОННЫХ СЕТЕЙ С ЕДИНЫМИ СЛОЯМИ ИЗВЛЕЧЕНИЯ ПРИЗНАКОВ И С НЕСКОЛЬКИМИ ВЫХОДАМИ, КОТОРЫЕ ОБУЧАЮТСЯ НА РАЗНЫХ ДАТАСЕТАХ ОДНОВРЕМЕННО | 2021 |
|
RU2779408C1 |
| СИСТЕМА И СПОСОБ ДЕТЕКТИРОВАНИЯ БЕСПИЛОТНЫХ ЛЕТАЛЬНЫХ АППАРАТОВ (БПЛА) | 2020 |
|
RU2746394C1 |
| Способ и устройство сжатия видеоинформации для передачи по каналам связи с меняющейся пропускной способностью и запоминания в системах хранения данных с использованием машинного обучения и нейросетей | 2018 |
|
RU2698414C1 |
| Способ обеспечения компьютерного зрения | 2022 |
|
RU2791587C1 |
| ИНТЕЛЛЕКТУАЛЬНАЯ АВТОМАТИЧЕСКАЯ СИСТЕМА ОБНАРУЖЕНИЯ НАРУШИТЕЛЕЙ | 2019 |
|
RU2721178C1 |
Группа изобретений относится к области автоматического анализа изображений. Техническим результатом является повышение достоверности автоматического определения движущихся объектов в поле зрения видеокамеры за счет сочетания быстрого метода определения движущихся объектов и метода нейросетевой обработки. Предложено устройство каскадной обработки потока изображений с помощью сверточной нейронной сети. Устройство содержит блок определения движения, соединенный с блоком нейросетевой фильтрации, который содержит блоки определения обобщенных признаков и блок принятия решения, при этом блок определения движения соединен параллельно со входами блоков определения обобщенных признаков, выходы которых соединены с первым входом блока принятия решения, второй вход которого соединен с выходом блока определения движения. Блок определения движения выполнен с возможностью получения на входе потока изображений, с возможностью определения положения фрагментов изображений с движущимися объектами на последовательных кадрах и передачи информации о положении фрагментов изображений с движущимися объектами в блоки определения обобщенных признаков. 2 н. и 8 з.п. ф-лы, 2 ил.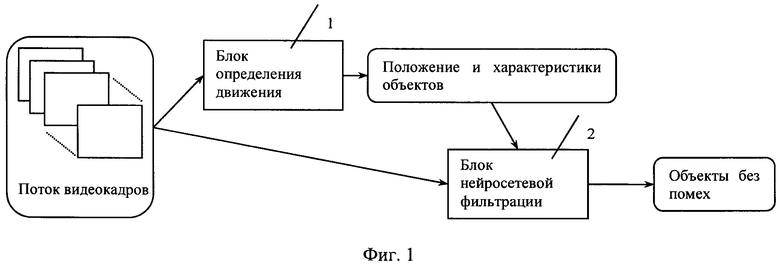
1. Устройство каскадной обработки потока изображений с помощью сверточной нейронной сети, содержащее блок определения движения, соединенный с блоком нейросетевой фильтрации, который содержит блоки определения обобщенных признаков и блок принятия решения, при этом блок определения движения соединен параллельно со входами блоков определения обобщенных признаков, выходы которых соединены с первым входом блока принятия решения, второй вход которого соединен с выходом блока определения движения, причем:
- блок определения движения выполнен с возможностью получения на входе потока изображений, с возможностью определения положения фрагментов изображений с движущимися объектами на последовательных кадрах и передачи информации о положении фрагментов изображений с движущимися объектами в блоки определения обобщенных признаков, а также с возможностью определения характеристик движущихся объектов и передачи их в блок принятия решения;
- блоки определения обобщенных признаков выполнены с возможностью получения на входе потока изображений и информации о положении фрагментов изображений с движущимися объектами, с возможностью параллельной обработки фрагментов изображений с движущимися объектами на серии последовательных кадров и определения обобщенных признаков движущихся объектов с помощью каскада из сверток и нелинейных преобразований посредством сверточной нейронной сети, а также с возможностью передачи обобщенных признаков в
- блок принятия решения, который выполнен с возможностью обработки обобщенных признаков и характеристик движущихся объектов, при этом принятия решения о том, являются движущиеся объекты помехами или действительными объектами.
2. Устройство по п. 1, отличающееся тем, что блок определения движения выполнен с возможностью определения характеристик движущихся объектов, таких как текстура и траектория движения.
3. Устройство по п. 1, отличающееся тем, что блок принятия решений состоит из последовательности полносвязных слоев.
4. Устройство по п. 1, отличающееся тем, что в каждом из параллельных блоков определения обобщенных признаков веса сверток выполнены с возможностью предварительной настройки с помощью большого количества изображений из открытых источников, а затем тонкой настройки на тех изображениях, с которыми предстоит работать в качестве исходных изображений потока.
5. Устройство по п. 1, отличающееся тем, что сверточная нейронная сеть адаптирована для изображений низкого разрешения.
6. Способ каскадной обработки потока изображений с помощью сверточной нейронной сети, в котором:
- с помощью блока определения движения получают на входе поток изображений, определяют положения фрагментов изображений с движущимися объектами на последовательных кадрах и передают информациию о положении фрагментов изображений с движущимися объектами в блоки определения обобщенных признаков, а также определяют характеристики движущихся объектов и передают их в блок принятия решения;
- с помощью блока определения обобщенных признаков получают на его входе поток изображений и информацию о положении фрагментов изображений с движущимися объектами, параллельно обрабатывают фрагменты изображений с движущимися объектами на серии последовательных кадров и определяют обобщенные признаки движущихся объектов с помощью каскада из сверток и нелинейных преобразований посредством сверточной нейронной сети, а также передают обобщенные признаки в
- блок принятия решения, с помощью которого обрабатывают обобщенные признаки и характеристики движущихся объектов, при этом принимают решение о том, являются движущиеся объекты помехами или действительными объектами.
7. Способ по п. 6, отличающийся тем, что определяют характеристики движущихся объектов, такие как текстура и траектория движения.
8. Способ по п. 6, отличающийся тем, что блок принятия решений состоит из последовательности полносвязных слоев.
9. Способ по п. 6, отличающийся тем, что с помощью каждого из параллельных блоков определения обобщенных признаков с помощью весов сверток осуществляют предварительную настройку, используя большое количество изображений из открытых источников, а затем тонкую настройку на тех изображениях, с которыми предстоит работать в качестве исходных изображений потока.
10. Способ по п. 6, отличающийся тем, что сверточная нейронная сеть адаптирована для изображений низкого разрешения.
| Токарный резец | 1924 |
|
SU2016A1 |
| Токарный резец | 1924 |
|
SU2016A1 |
| US 5625707 A, 29.04.1997 | |||
| ОБУЧЕНИЕ СВЕРТОЧНЫХ НЕЙРОННЫХ СЕТЕЙ НА ГРАФИЧЕСКИХ ПРОЦЕССОРАХ | 2006 |
|
RU2424561C2 |
| Токарный резец | 1924 |
|
SU2016A1 |
| СПОСОБ УПРАВЛЕНИЯ ДВИЖУЩИМСЯ ОБЪЕКТОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2476825C2 |

