Изобретение относится к области морской техники и, главным образом, к автономным океанографическим, гидроакустическим станциям и буям, может быть использовано в военно-морской технике и при проведении работ в шельфовой зоне морей и океана, в частности для скрытной установки плавучих тел на заданное углубление на разных глубинах моря.
Известны способы установки на заданное углубление: штерто-грузовой (Н.А. Азарова) (К. В.Морозов "Минно-торпедное оружие", М: Изд. ДОСААФ, 1971, стр. 13) и гидростатический (С.О.Макарова) (Б.П.Феодосьев "Минное оружие", Л., 1931, стр.54-70, 101-102, "Описание мины образца 1926 г.", М: Военмориздат, 1941, стр. 15-25, К. В. Морозов "Минно-торпедное оружие", М: Изд. ДОСААФ, 1971, стр.11-12).
Постановка плавучих тел штерто-грузовым способом осуществляется с поверхности воды.
На якоре плавучего тела помещается вьюшка (барабан) с канатом. К вьюшке прикрепляется специальный стопорящий механизм, соединенный посредством штерта (шнура) с грузом. Когда плавучее тело сбрасывают за борт, оно вследствие запаса плавучести держится на поверхности воды, якорь же отделяется от него и тонет, разматывая канат с вьюшки.
Перед якорем движется груз, закрепленный на штерте, длина которого равняется заданному углублению плавучего тела. Груз первым касается дна и тем самым дает некоторую слабину штерту. В этот момент срабатывает стопорящий механизм и разматывание каната прекращается. Якорь же продолжает движение на дно, увлекая за собой плавучее тело, которое погружается на углубление, равное длине штерта.
Недостатками этого способа являются: отсутствие скрытности постановки, недостаточная точность установки на заданное углубление.
В настоящее время наиболее предпочтительным является гидростатический способ (С. О.Макарова), как обеспечивающий наибольшую точность и скрытность установки на заданное углубление на разных глубинах моря. Постановка плавучего тела этим способом осуществляется, как с поверхности воды, так и под водой.
Этот способ представлен в книге Феодосьева Б.П. "Минное оружие", Л., 1931, стр. 101-102 и принят в качестве прототипа.
После отделения плавучего тела от якоря плавучее тело утягивается якорем на глубину. Якорь погружается, плавучее тело всплывает, при этом канатосъемное устройство сматывает канат с барабана, расположенного на плавучем теле. Канат подсоединен к якорю с помощью пружинного буфера. Так как скорость погружения якоря больше скорости всплытия плавучего тела благодаря тормозному устройству канатосъемника, якорь приходит на грунт, а плавучее тело продолжает всплывать. При погружении системы - плавучее тело плюс якорь на определенной глубине срабатывает гидростат, расположенный на канатосъемнике, подготавливая к работе стопорное устройство канатосъемника. После прихода якоря на грунт всплывающее плавучее тело достигает заданного углубления, где вторично срабатывает гидростат, освобождая стопорное устройство. Стопорное устройство срабатывает и съем каната с барабана прекращается. Плавучее тело стало на заданное углубление.
Недостатком указанного способа является то, что в процессе установки за счет большой величины запаса кинетической энергии плавучим телом или плавучим телом и якорем, в момент прекращения сматывания каната в нем возникают значительные динамические усилия (рывок), которые могут вызвать обрыв каната, поэтому обязательно применяют амортизирующие устройства (пружинные, капроновые и др. буфера), гасящие динамические усилия (рывок). Эти устройства весьма сложны в изготовлении, дорогостоящие и требуют увеличения размеров якорей для их размещения.
Задачей настоящего изобретения является создание способа установки плавучих тел на заданное углубление, исключающего применение в процессе установки амортизирующих устройств, что позволит снизить стоимость изготовления изделий, упростить конструкцию и улучшить их эксплуатацию.
Поставленная задача достигается тем, что в предлагаемом способе установки плавучих тел на заданное углубление, включающем отделение плавучего тела от якоря, непрерывное сматывание каната с плавучего тела посредством устройства сматывания каната, начало и прекращение сматывания каната по команде гидростатического прибора, размещенного на плавучем теле - в момент прекращения сматывания каната осуществляют гашение возникающих в канате динамических усилий путем проскальзывания каната, например, по канавкам роликового устройства, до достижения равновесия сил, действующих на канат.
Техническая реализация предлагаемого способа поясняется чертежом, на котором изображена компановка узлов системы установки плавучего тела и необходимые обозначения для описания системы установки и принципа работы, а также теоретическими выкладками.
Система установки состоит из барабана с канатом 1, канатосъемника 2, механизма установки (роликового устройства) 3. Верхний фланец барабана 1 крепится к переборке плавучего тела болтами 4, на нижнем фланце барабана 1 закреплен винтами 6 неподвижный фрикционный диск 7 фрикционного регулятора усилия сматывания, через центральное отверстие которого проходит ось 8, поджимающая верхний подвижный фрикционный диск 9 с поводком 10 посредством пружины 11, которая сжата гайкой 12.
Поводок 10 снабжен роликом 13, предназначенным для вращения по фланцу барабана, двумя скобами 14, через которые проходит канат, двумя кронштейнами 15, на осях которых находятся центральный ролик 16 и направляющий ролик малого диаметра 17.
Канат с центрального ролика 16 через втулку 18 поступает на роликовое устройство 3, состоящее из двух роликов 19, 20 с канавками, жестко связанных с зубчатыми колесами, которые находятся в зацеплении с шестерней 22, на валу которой находятся гидротормоз 23 и фрикционный барабан 24. Стопорение и расстопорение барабана 24 осуществляется спиральной пружиной (тормозом) 25, управляемой электромагнитом 26. Подача напряжения на электромагнит и снятие напряжения с него осуществляется по команде гидростатического прибора, размещенного на плавучем теле. Канат с выходного ролика 20 через втулку 27 идет к якорю.
При установившемся режиме сматывания каната канатосъемником (см. чертеж)
Mвр = Mторм, (1)
Mвр = tвых) • Rсм, (2)
Mторм = f • n • Rср • Q, (3)
где Mвр - вращающий момент;
Mторм - тормозной момент;
tвых = tвх - усилие в канате на выходе с канатосъемника, равное усилию в канате на входном ролике роликового устройства;
Rсм - радиус сматывания каната;
f - коэффициент трения;
n - число пар трения;
Rср - средний радиус фрикционных дисков фрикционного регулятора усилия сматывания;
Q - усилие пружины, сжимающей фрикционные диски.
Подставим в формулу (1) выражения (2), (3), тогда:
tвых • Rсм = f • n • Rср • (Q-tвых)
или
где  - коэффициент фрикционного регулятора усилия сматывания,
- коэффициент фрикционного регулятора усилия сматывания, - коэффициент обратной связи,
- коэффициент обратной связи,
тогда:  и, так как K1 • Kос >> 1, то tвых ≅ Q
и, так как K1 • Kос >> 1, то tвых ≅ Q
При возмущающих факторах, например, при изменении коэффициента трения в результате коррозии, слипания дисков, возросшее tвых сильнее сжимает пружину, что вызывает уменьшение усилия сжатия дисков, а следовательно, уменьшаются Mторм и tвых, при уменьшении tвых пружина обеспечивает большее усилие сжатия дисков и, следовательно, увеличиваются Mторм и tвых (поступательное движение канатосъемника происходит в направлении стрелок A).
Канат, сходящий с канатосъемника, заведен на ролики роликового устройства и при предлагаемом способе установки работа роликового устройства основана на параметрической зависимости по формуле Эйлера:
где e=2,718 - основание натурального логарифма;
α - угол обхвата канатом роликов роликового устройства;
f - коэффициент трения;
Tвых - усилие в канате при сходе с выходного ролика роликового устройства;
tвх = tвых - усилие в канате на входном ролике роликового устройства, равное усилию в канате на выходе с канатосъемника;
Tвых - усилие в канате при сходе с выходного ролика роликового устройства, обеспечиваемое силой трения каната в канавках роликов, выбирается заведомо больше положительной плавучести плавучего тела, так чтобы это усилие обеспечивало неподвижность каната в статическом режиме, т.е. каждому входному усилию в канате при сходе с выходного ролика соответствовало усилие tвых канатосъемника, равное усилию tвн на входном ролике роликового устройства.
При прекращении сматывания каната (стопорении) усилие в канате в силу динамики (рывок) превышает Tвых, в результате чего происходит проскальзывание каната по канавкам роликов роликового устройства до тех пор, пока работа сил трения каната о канавки не уравновесит работу инерционных сил плавучего тела или плавучего тела и якоря, т.е. стабилизация Tвых как в статическом режиме, так и в режиме проскальзывания обеспечивается за счет стабилизации tвых канатосъемника.
Поскольку динамические перегрузки в канате ликвидируются за счет трения при проскальзывании каната по канавкам застопоренных роликов до исчезновения приращения усилий в канате, то, следовательно, не требуется применение амортизирующих устройств (пружинных, капроновых и др. буферов).
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ БЕЗУДАРНОЙ АВТОМАТИЧЕСКОЙ УСТАНОВКИ ПЛАВУЧИХ ОБЪЕКТОВ НА ЗАДАННОЕ УГЛУБЛЕНИЕ И СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2020 |
|
RU2747141C1 |
| БУФЕРНОЕ УСТРОЙСТВО | 2002 |
|
RU2228875C2 |
| ПОЗИЦИОННАЯ СТАНЦИЯ ЗОНДИРОВАНИЯ ВОДНОЙ СРЕДЫ | 2002 |
|
RU2237594C2 |
| СПОСОБ УДЕРЖАНИЯ СПАСАТЕЛЬНОГО СУДНА НАД АВАРИЙНОЙ ПОДВОДНОЙ ЛОДКОЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2510350C2 |
| АВТОНОМНЫЙ ВСПЛЫВАЮЩИЙ БУЙ | 1992 |
|
RU2025395C1 |
| САМОХОДНЫЙ ГИДРОАКУСТИЧЕСКИЙ БУЙ-МАЯК И СПОСОБ НАВИГАЦИОННОГО ОБОРУДОВАНИЯ МОРСКОГО РАЙОНА | 2018 |
|
RU2710831C1 |
| Устройство для регулирования длины буйрепа | 1979 |
|
SU885098A1 |
| МОТОЛЕБЕДКА | 2011 |
|
RU2489345C1 |
| Кабелепрокладочный комплекс | 1990 |
|
SU1794791A1 |
| Подъемная установка | 1978 |
|
SU779233A1 |
Изобретение предназначено для скрытой установки плавучих тел на заданное углубление на разных глубинах моря и может быть использовано в военно-морской технике. Способ установки плавучих тел на заданное углубление включает отделение плавучего тела от якоря, непрерывное сматывание каната с плавучего тела посредством устройства сматывания каната, начало и прекращение сматывания каната по команде гидростатического прибора, размещенного на плавучем теле. В момент прекращения сматывания каната осуществляют гашение возникающих в канате динамических усилий путем проскальзывания каната, например, по канавкам роликового устройства до достижения равновесия сил, действующих на канат. Достигается снижение стоимости изготовления изделий, упрощение конструкции и улучшение их эксплуатации. 1 ил.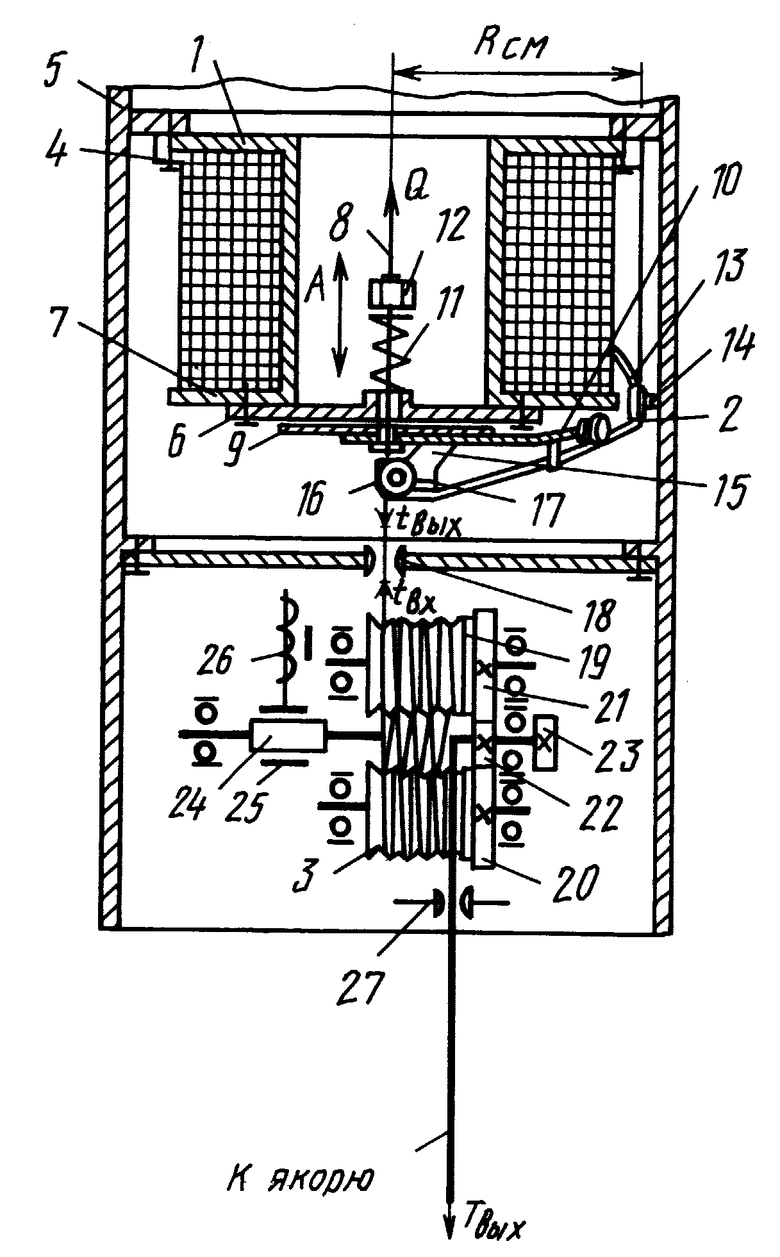
Способ установки плавучих тел на заданное углубление, включающий отделение плавучего тела от якоря, непрерывное или периодическое сматывание каната с плавучего тела посредством устройства сматывания каната, начало и прекращение сматывания каната по команде гидростатического прибора, размещенного на плавучем теле, отличающийся тем, что в момент прекращения сматывания каната осуществляют гашение возникающих в канате динамических усилий путем проскальзывания каната, например, по канавкам роликов роликового устройства до достижения равновесия сил, действующих на канат.
| Федосеев Б.П | |||
| Минное оружие | |||
| - Л., 1931, с..с.101, 102 | |||
| Морозов К.В | |||
| Минно-торпедное оружие | |||
| - М.: ДОСААФ, 1971, с.11 - 13 | |||
| GB 2005210 A, 19.04.79 | |||
| US 3951064 A, 20.04.76. |
