Настоящее техническое решение относится к подвижным средствам спутниковой связи и может быть использовано для организации радиолиний спутниковой связи при работе через транспондеры космических аппаратов (КА) связи и вещания, находящихся на геостационарной и высокоэллиптической орбитах (ГСО и ВЭО) в движении.
Особенностью подвижных абонентских земных станций (АЗС) систем спутниковой связи (ССС), размещаемых на транспортном средстве, является способность автоматического наведения луча антенны на КА на ГСО или ВЭО и удерживать их наведение в движении транспортного средства. По способу наведения луча антенны на КА антенные системы АЗС делятся на электромеханические, электронные (цифровые) и комбинированные электронно-электромеханические способы. Предлагаемое техническое решение относится к комбинированному способу наведения и стабилизации направления луча антенны в движении.
Из существующего уровня техники известен абонентский терминал подвижной спутниковой связи RaySat 7000 компании Gilat, Израиль (Mario Gachev, Victor Boyanov, Stanimir Kamenopolsky, Vesselin Peshlov, Borislav Marinov, Plamen Danko// On-the-Move Antenna Systems for Broad-Band Satellite Communications//Конференция: 2014 8-я Европейская конференция по антеннам и распространению (EuCAP), Гаага, Нидерланды, 6-11 апреля 2014 г. ), описанный в патентах US 7911400 B2 (опубл. 24.01.2008) и US 7379707 B2 (опубл. 02.03.2006), который включает:
- низкопрофильную приемо-передающую спутниковую антенну (Mobile antenna system for satellite communications, US 7385562 B2, опубл. 07.07.2005), устанавливаемую на транспортном средстве. Антенна состоит из ряда антенных приемных и передающих апертур (антенных решеток), размещаемых на поворотной платформе с азимутальным приводом и энкодером. Апертуры могут синхронно изменять угол наклона относительно горизонта при помощи угломестных электромеханических приводов с энкодерами. Электронная схема антенны с помощью линий временной задержки позволяет обеспечивать необходимый сдвиг фаз между фазовыми центрами апертур для обеспечения электронной подстройки луча антенны по углу места;
- датчики слежения, включая индикатор уровня принимаемого сигнала, один или несколько гироскопов, инклинометр и приемник глобальной навигационной спутниковой системы (ГНСС);
- электромеханический поляризатор, имеющий механически вращающийся зонд, установленный на входе в круглом волноводе апертуры;
- процессор, сконфигурированный для приема данных от датчиков слежения и использования данных для автономного получения и поддержания отслеживания направления луча на спутник с использованием двухкоординатного электромеханического привода во время движения транспортного средства, на котором установлена антенна, и, для отслеживания ориентации линейной поляризации линейно поляризованного сигнала со спутника путем поворота входного электромеханического зонда узла поляризатора (US 7911400 B2 опубл. 24.01.2008).
Недостатками данного технического решения являются:
- сложная и дорогостоящая прецизионная электромеханическая система трехкоординатного наведения луча антенны (азимут, угол места), и ориентация линейной поляризации;
- в антенном устройстве реализуется только линейная поляризация произвольного наклона;
- точное наведение луча антенны на КА и ориентация линейной поляризации, согласованной с линейной поляризацией транспондера КА, ведется с использованием датчика уровня принимаемого сигнала, что для достижения точности наведения требует повышенного отношения сигнал к шуму в приемном тракте;
- при наведении луча по углу места от 0 до 90 градусов с использованием механического наклонна множественных апертур антенной системы и электронной подстройки сдвига фаз между апертурами пространственной конфигурации существенно изменяется коэффициент усиления антенны и уровни боковых лепестков в угломестном сечении суммарной диаграммы направленности.
Задачей, на решение которой направлено заявляемое техническое решение, является упрощение и удешевление электромеханической части антенны.
Данная задача решается за счет того, что заявленное техническое решение - абонентская земная станция подвижной спутниковой связи включает приемную и передающую апертуры, состоящие из планарных активных фазированных антенных решеток (АФАР), представляющих собой многослойную печатную плату с внешней стороны которой выполнены двухполяризационные печатные групповые антенные элементы, а с внутренней стороны размещены восьмиканальные, соответственно, передающие и приемные монолитные интегральные схемы (МИС) для формирования диаграммы направленности и произвольной поляризации, обеспечивающие совместно с антенными элементами электронное сканирование в угловой области ±3° по азимуту и ±20° по углу места (без существенного ухудшения характеристик диаграмм направленности) и вектора поляризации, согласованного с поляризацией транспондеров КА.
Приемная АФАР абонентской земной станции подвижной спутниковой связи может быть разделена на четыре подрешетки, формирующие совместно с электронным устройством обработки сигналов каналы фазового пеленгатора сигнала маяка КА с вертикальной и горизонтальной базами для автоматического наведения луча АФАР на КА в движении, причем азимутальный и угломестный электромеханические приводы осуществляют грубое наведение электрической оси антенны в диапазоне углов - по азимуту 0…360°, по углу места 25…90° по командам от процессора системы управления, использующего для этого данные приемника ГНСС, инерциального датчика и инклинометра.
Техническим результатом, обеспечиваемым приведенной совокупностью признаков, является повышение точности наведения и стабилизации углового положения луча АЗС в движении.
Изобретение поясняется следующими фигурами:
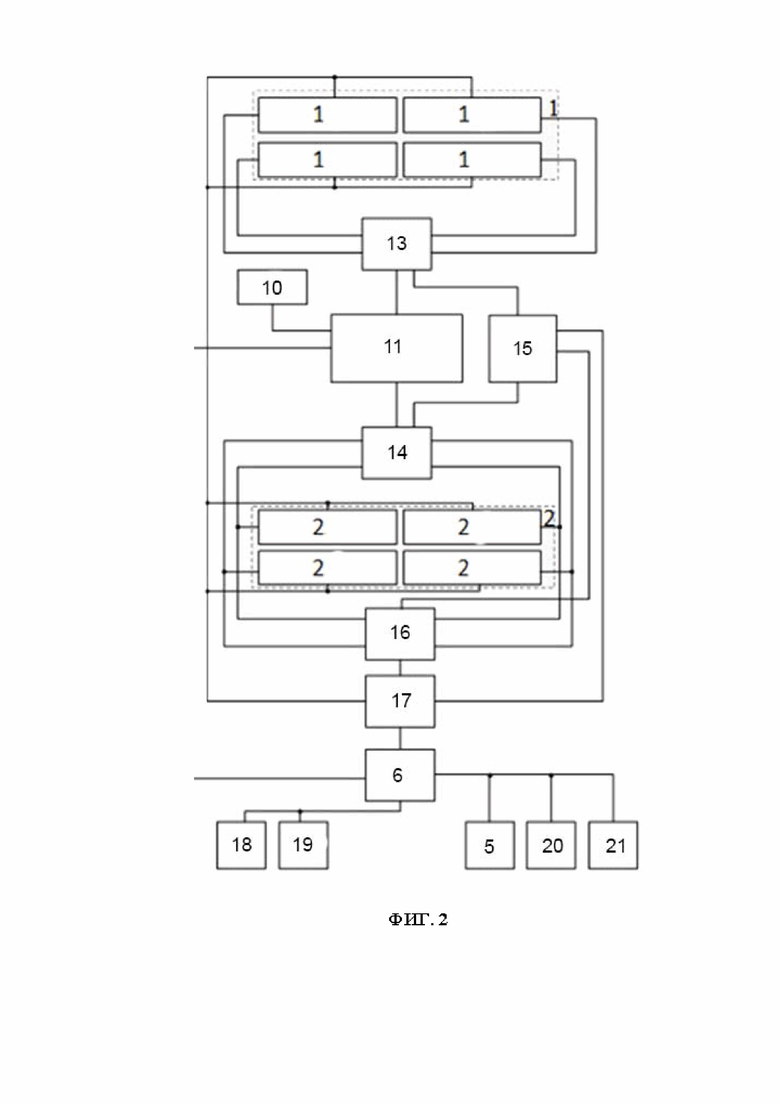
Фиг. 1 - чертеж конструкторской компоновки АЗС в двух ракурсах с расположением составных частей, антенны находятся в рабочем положении;
фиг. 2 - блок схема АЗС.
На фигурах цифрами обозначены следующие конструктивные элементы:
1 - передающая АФАР; 2 - приемная АФАР; 3 - электронный модуль АФАР; 4 - блок питания; 5 - приемник ГНСС; 6 - компьютер управления АЗС; 7 - электрический интерфейс между поворотной и базовой платформой; 8 - привод поворота по азимуту; 9 - вентиляторы системы охлаждения; 10 - роутер; 11 - спутниковый модем; 12 - привод по углу места; 13, 14 - конверторы частот вверх и вниз соответственно; 15 - синтезатор гетеродинных и опорных частот; 16 - блок фазовых детекторов; 17 - центральный контроллер управления передающей и приемной АФАР; 18, 19 - электромеханические приводы перемещения антенны по азимуту и углу места; 20 - датчик акселерометра; 21 - датчик - инклинометр.
Устройство работает следующим образом.
Включается АЗС с компьютера или любого смартфона, планшета и т.п. (на фиг. 2 не приведен), оснащенного Wi-Fi модемом и с установленной заранее программой управления, выбирается КА из предлагаемого программой списка КА. Передающая и приемная антенна автоматически устанавливается по углу места и азимуту в соответствии с позиционированием АЗС по данным приемника ГНСС 5 и датчика-инклинометра 21 с помощью приводов 18, 19. Компьютер управления АЗС 8 осуществляет настройки спутникового модема 10, центрального контролера управления антенной 17. Центральный контролер управления 17 устанавливает частоты гетеродинов 15 конверторов 13, 14 и исходное амплитудно-фазовое распределение в приемной и передающей АФАР 1,2 и параметры поляризации на прием и передачу. Фазовый пеленгатор (ФП), встроенный в приемную антенну 2 настроен на прием сигнала маяка, излучаемого антенной КА. ФП имеет два канала пеленгации с вертикальной и горизонтальной базами, которые формируются от четырех квадрантов приемной АФАР 2. Сигналы от квадрантов подается на блок фазовых детекторов, где они подвергаются преобразованию по частоте, фильтрации, фазовому детектированию с последующей оцифровкой. На выходе фазовых детекторов формируется оцифрованное напряжение пропорциональное углу наклона плоской волны к плоскости АФАР. Центральный контролер 17 определяет по этим данным насколько необходимо отклонить луч передающей и приемной антенн для наведения на КА. В процессе движения транспортного средства происходит отклонение луча антенн плоскости поляризации от направления на КА за счет изменения курса, наклона. ФП следит за данным отклонением по радиосигналу маяка в диапазоне углов захвата ±1,6° по азимуту и ±5° по углу места от оси луча при возможности электронного отклонения оси луча ±3° по азимуту и ±20° по углу места. Центральный контролер 17 осуществляет подстройку фазового распределения в АФАР. Одновременно компьютер управления 6 по данным приемника ГНСС, датчиков акселерометра и инклинометра определяет отклонение электрической оси антенны от направления на КА и плоскости вектора поляризации и корректирует ее с шагом ±1,0…1,5° по азимуту и ±5° по углу места с помощью приводов, тем самым осуществляя грубую подстройку направления на КА. По данным от компьютера управления 6 об изменении плоскости вектора поляризации центральный контролер 17 выдает команду в АФАР для подстройки вектора поляризации электронном способом с шагом 1° (в случае линейной поляризации, для круговых поляризаций данная функция не задействована). Приемная и передающая АФАР 1,2 соединены по суммарному сигналу от всех квадрантов по промежуточной частоте через конверторы 3,4 со спутниковым модемом 11, который через беспроводной роутер 10 обеспечивает двунаправленный поток данных с КА на пользовательское устройство компьютер, смартфон и т.п.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА И СПОСОБ СЛЕЖЕНИЯ АНТЕННОЙ СИСТЕМЫ ЗЕМНОЙ СТАНЦИИ ПОДВИЖНОЙ СПУТНИКОВОЙ СВЯЗИ | 2023 |
|
RU2821956C1 |
| КОСМИЧЕСКАЯ СИСТЕМА ДИСТАНЦИОННОГО ЗОНДИРОВАНИЯ ЗЕМЛИ | 2020 |
|
RU2747240C1 |
| КОСМИЧЕСКИЙ МНОГОРЕЖИМНЫЙ РАДИОЛОКАТОР С СИНТЕЗИРОВАННОЙ АПЕРТУРОЙ СО СКАНИРУЮЩЕЙ ГИБРИДНО-ЗЕРКАЛЬНОЙ АНТЕННОЙ | 2023 |
|
RU2826709C1 |
| ГИБРИДНАЯ ЗЕРКАЛЬНАЯ СКАНИРУЮЩАЯ АНТЕННА ДЛЯ МНОГОРЕЖИМНОГО КОСМИЧЕСКОГО РАДИОЛОКАТОРА С СИНТЕЗИРОВАННОЙ АПЕРТУРОЙ | 2009 |
|
RU2392707C1 |
| СПОСОБ НАВЕДЕНИЯ ПЕРЕДАЮЩЕЙ АНТЕННЫ РЕТРАНСЛЯТОРА | 2007 |
|
RU2328824C1 |
| Способ обзора воздушного пространства импульсно-доплеровской радиолокационной станцией с активной фазированной антенной решеткой | 2022 |
|
RU2794466C1 |
| АНТЕННО-ЭЛЕКТРОННЫЙ БЛОК С УПРАВЛЯЕМОЙ КОНФИГУРАЦИЕЙ ДИАГРАММЫ НАПРАВЛЕННОСТИ | 2009 |
|
RU2408140C2 |
| ВЕРТОЛЕТНЫЙ РАДИОЛОКАЦИОННЫЙ КОМПЛЕКС | 2007 |
|
RU2344439C1 |
| УСТРОЙСТВО СВЧ-СВЯЗИ | 2005 |
|
RU2309542C2 |
| СПОСОБ НАВЕДЕНИЯ ПЕРЕДАЮЩЕЙ АНТЕННЫ РЕТРАНСЛЯТОРА НА АБОНЕНТСКУЮ СТАНЦИЮ | 2005 |
|
RU2308157C1 |

Изобретение относится к подвижным средствам спутниковой связи и может быть использовано для организации радиолиний спутниковой связи при работе через транспондеры космических аппаратов (КА) связи и вещания, находящихся на геостационарной и высокоэллиптической орбитах (ГСО и ВЭО) в движении. Техническим результатом изобретения является повышение точности наведения и стабилизации углового положения луча абонентских земных станций в движении. Абонентская земная станция подвижной спутниковой связи включает приемную и передающую апертуры, состоящие из планарных активных фазированных антенных решеток (АФАР), представляющих собой многослойную печатную плату, с внешней стороны которой выполнены двухполяризационные печатные групповые антенные элементы, а с внутренней стороны размещены восьмиканальные, соответственно, передающие и приемные монолитные интегральные схемы (МИС) для формирования диаграммы направленности и произвольной поляризации, обеспечивающие совместно с антенными элементами электронное сканирование в угловой области ±3° по азимуту и ±20° по углу места и вектора поляризации, согласованного с поляризацией транспондеров КА. 1 з.п. ф-лы, 2 ил.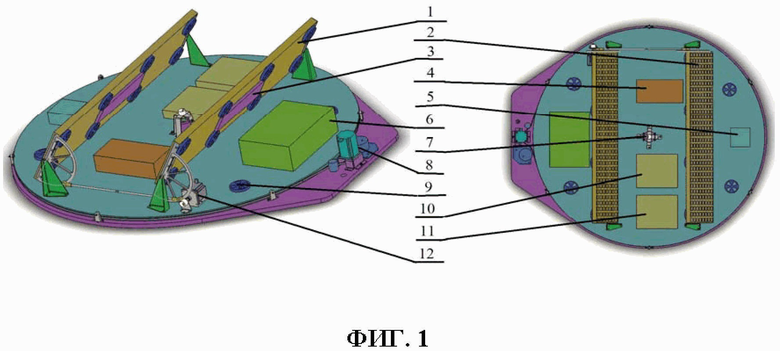
1. Абонентская земная станция подвижной спутниковой связи, характеризующаяся тем, что она включает приемную и передающую апертуры, состоящие из планарных активных фазированных антенных решеток, представляющих собой многослойную печатную плату, с внешней стороны которой выполнены двухполяризационные печатные групповые антенные элементы, а с внутренней размещены 8-канальные, соответственно, передающие и приемные монолитные интегральные схемы для формирования диаграммы направленности и произвольной поляризации, обеспечивающие совместно с антенными элементами электронное сканирование в угловой области ±3° по азимуту и ±20° по углу места и вектора поляризации, согласованного с поляризацией транспондеров космического аппарата.
2. Абонентская земная станция подвижной спутниковой связи по п.1, отличающаяся тем, что приемная активная фазированная антенная решетка разделена на четыре подрешетки, формирующие совместно с электронным устройством обработки сигналов каналы фазового пеленгатора сигнала маяка космического аппарата с вертикальной и горизонтальной базами для автоматического наведения луча активной фазированной антенной решетки на космический аппарат в движении, причем азимутальный и угломестный электромеханические приводы осуществляют грубое наведение электрической оси антенны по командам от процессора системы управления, использующего для этого данные приемника глобальной навигационной спутниковой системы, и инерциального датчика, и инклинометра.
| US 2011215985 A1, 08.09.2011, реферат, формула, сс | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| US 2009231186 A1, 17.09.2009, реферат, формула, сс | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| АБЛАМЕЙКО С.В | |||
| и др | |||
| Малые космические аппараты: пособие для студентов факультетов радиофизики и компьют | |||
| технологий, мех.-мат | |||
| и геогр | |||
| - Минск : БГУ, 2012 | |||
| Катодное реле | 1918 |
|
SU159A1 |
| - | |||

