ОБЛАСТЬ ТЕХНИКИ И УРОВЕНЬ ТЕХНИКИ
[001] Настоящее изобретение в целом относится к измерительным и позиционирующим системам, находящимся в трехмерном пространстве.
[002] В настоящее время прилагают много усилий для использования множества датчиков, таких как камеры или другие устройства формирования изображения, в данном пространстве для обеспечения информированности об обстановке в реальном времени и данных измерений в пределах этого пространства. В общем случае используют неподвижную точку отсчета для определения положения камер в пределах этого пространства с обеспечением, таким образом, базиса для определения информации о позиционировании для данных изображения, получаемых камерами.
[003] Однако иногда в условиях некоторых крупных заводов структура самого завода может быть недостаточно неподвижной для обеспечения надежной точки отсчета для данных изображения, получаемых внутри ее. Например, изменения температуры могут приводить к термическому расширению или сжатию конструкции. В некоторых географических местах движение приливов может вызывать перемещение конструкций в зданиях, расположенных в прибрежной зоне. Сильный ветер и другие погодные явления могут приводить к аналогичным последствиям. В результате таких воздействий камеры, установленные в указанном пространстве, могут перемещаться относительно какой-либо точки отсчета в пределах выбранного пространства. Это может приводить к отклонениям в данных изображения, получаемого камерами, и любая информация о позициОйировании, определяемая с их помощью, может становиться неточной. Кроме того, при решении некоторых производственных задач, таких как реализация механической обработки и сборочных процессов, связанных с летательным аппаратом, допуски на измерения могут быть очень небольшими. Таким образом, любая используемая измерительная система должна иметь соответствующую точность.
[004] Существует потребность в системе, которая может определять информацию о положении в трехмерном пространстве без необходимости в неподвижной точке отсчета.
РАСКРЫТИЕ СУЩНОСТИ ИЗОБРЕТЕНИЯ
[005] В одном примере описана система определения информации об относительном положении, включающая в себя множество позиционирующих устройств для определения данных об относительном положении в трехмерном пространстве, при этом каждое позиционирующее устройство имеет линию визирования, при этом данные об относительном положении, определяемые посредством каждого позиционирующего устройства, включают в себя данные об относительном положении относительно позиционирующего устройства для каждого другого позиционирующего устройства в пределах его линии визирования. Система также включает в себя множество устройств формирования изображения для получения данных изображения объекта в пределах указанного трехмерного пространства, и вычислительное устройство, выполненное с возможностью соотнесения данных об относительном положении, определяемых посредством указанного множества позиционирующих устройств, и данных изображения, получаемых посредством указанного множества устройств формирования изображения, с определением, таким образом, информации об относительном положении, соответствующей указанному объекту в пределах указанного трехмерного пространства.
[006] Еще в одном примере описан способ. Способ включает операции, согласно которым определяют посредством множества позиционирующих устройств данные об относительном положении в трехмерном пространстве, при этом каждое позиционирующее устройство имеет линию визирования, а данные об относительном положении, определяемые посредством каждого позиционирующего устройства, включают в себя данные об относительном положении в отношении данных о положении каждого другого позиционирующего устройства в пределах его линии визирования. Способ также включает операции, согласно которым получают данные изображения объекта в пределах указанного трехмерного пространства посредством множества устройств формирования изображения и соотносят вычислительным устройством данные об относительном положении, определяемые посредством указанного множества позиционирующих устройств, и данные изображения, получаемые посредством указанного множества устройств формирования изображения. Способ также включает операции, согласно которым, на основании соотнесения данных об относительном положении, определяемых посредством указанного множества позиционирующих устройств, и данных изображения, получаемых посредством указанного множества устройств формирования изображения, определяют вычислительным устройством информацию об относительном положении, соответствующую указанному объекту в пределах указанного трехмерного пространства.
[007] Еще в одном примере описан некратковременный компьютерочитаемый носитель информации. Некратковременный компьютерочитаемый носитель информации имеет сохраненные в нем инструкции, которые при их исполнении вычислительным устройством, побуждают вычислительное устройство реализовывать функции, согласно которым определяют посредством множества позиционирующих устройств данные об относительном положении в трехмерном пространстве, при этом каждое позиционирующее устройство имеет линию визирования, а данные об относительном положении, определяемые посредством каждого позиционирующего устройства, включают в себя данные об относительном положении относительно позиционирующего устройства для каждого другого позиционирующего устройства в пределах его линии визирования. Согласно инструкциям также получают данные изображения объекта в пределах указанного трехмерного пространства посредством множества устройств формирования изображения и соотносят данные об относительном положении, определяемые посредством указанного множества позиционирующих устройств, и данные изображения, получаемые посредством указанного множества устройств формирования изображения. Согласно инструкциям также, на основании соотнесения данных об относительном положении, определяемых посредством указанного множества позиционирующих устройств, и данных изображения, получаемых посредством указанного множества устройств формирования изображения, определяют информацию об относительном положении, соответствующую указанному объекту в пределах указанного трехмерного пространства.
[008] Указанные признаки и функции могут быть реализованы независимо в различных примерах или могут быть скомбинированы в других примерах, дополнительные подробности которых могут быть очевидными при обращении к последующему описанию и чертежам.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[009] Признаки иллюстративных примеров, обеспечивающие новизну по сравнению с уровнем техники, изложены в прилагаемой формуле изобретения. При этом иллюстративные примеры, а также предпочтительный режим их применения, дополнительные цели и признаки будут лучше поняты из следующего подробного описания иллюстративного примера раскрытия настоящего изобретения при рассмотрении вместе с сопровождающими чертежами.
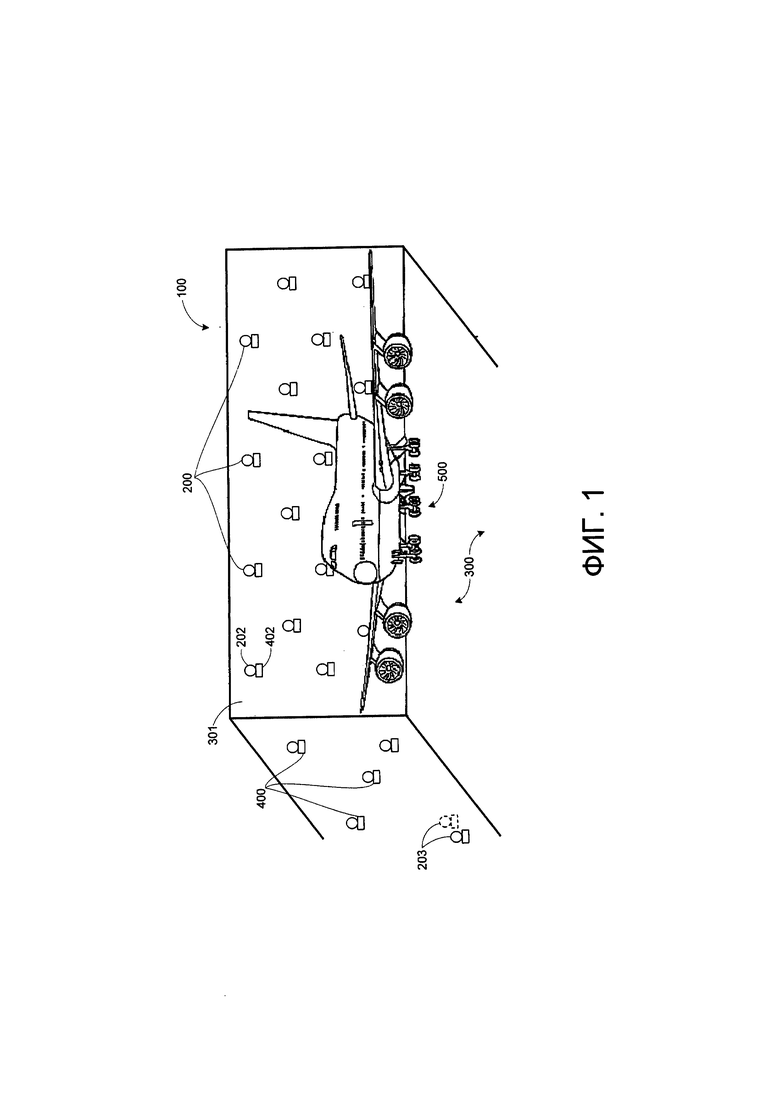
[0010] На ФИГ. 1 показан пример системы определения информации об относительном положении в трехмерном пространстве согласно примерному варианту осуществления.
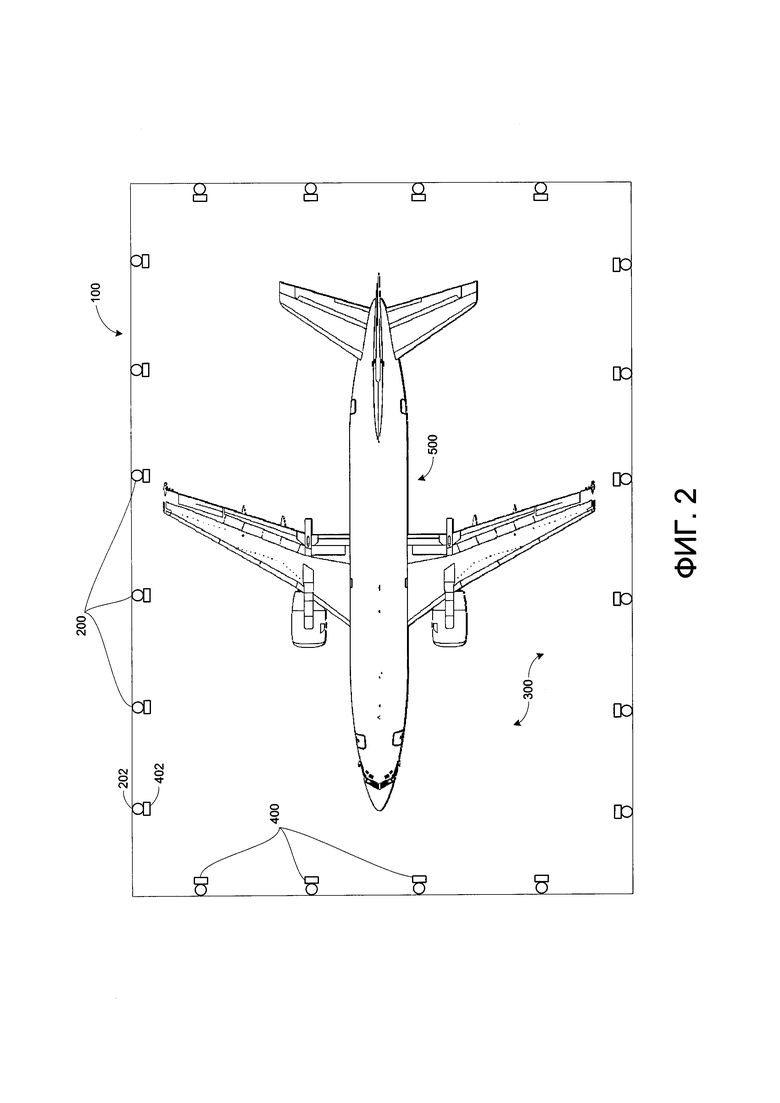
[0011] На ФИГ. 2 показан еще один вид примера системы определения информации об относительном положении в трехмерном пространстве согласно примерному варианту осуществления.
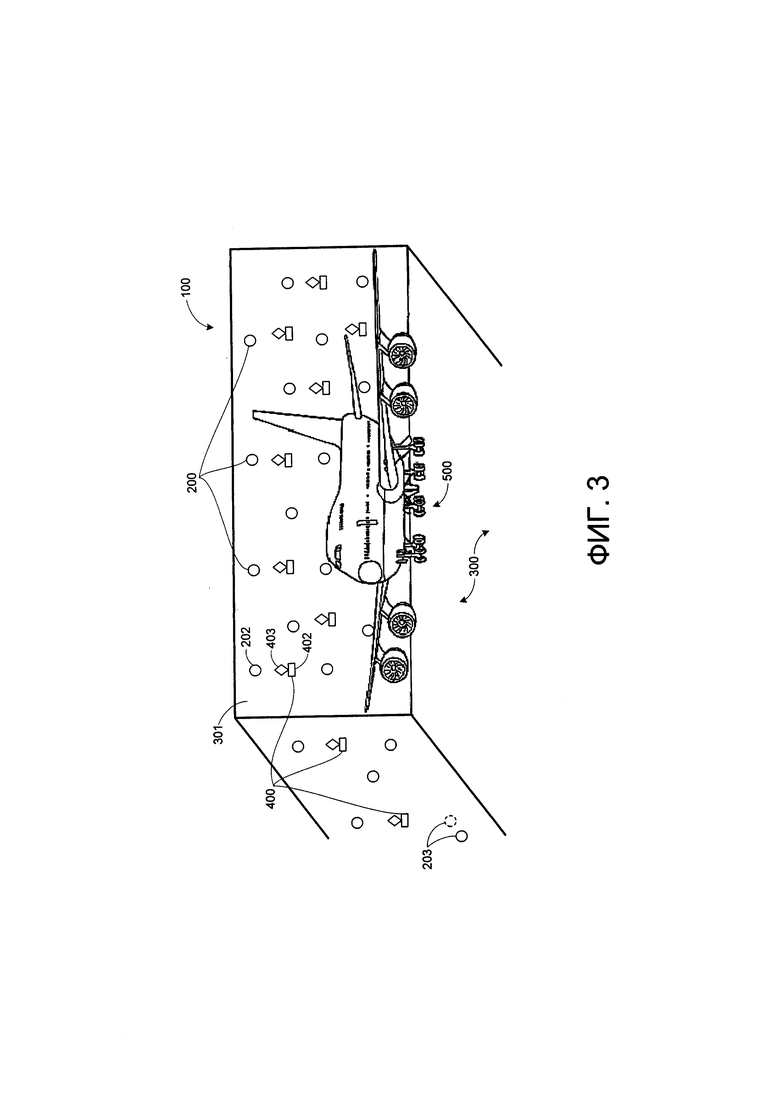
[0012] На ФИГ. 3 показан еще один пример системы определения информации об относительном положении в трехмерном пространстве согласно примерному варианту осуществления.
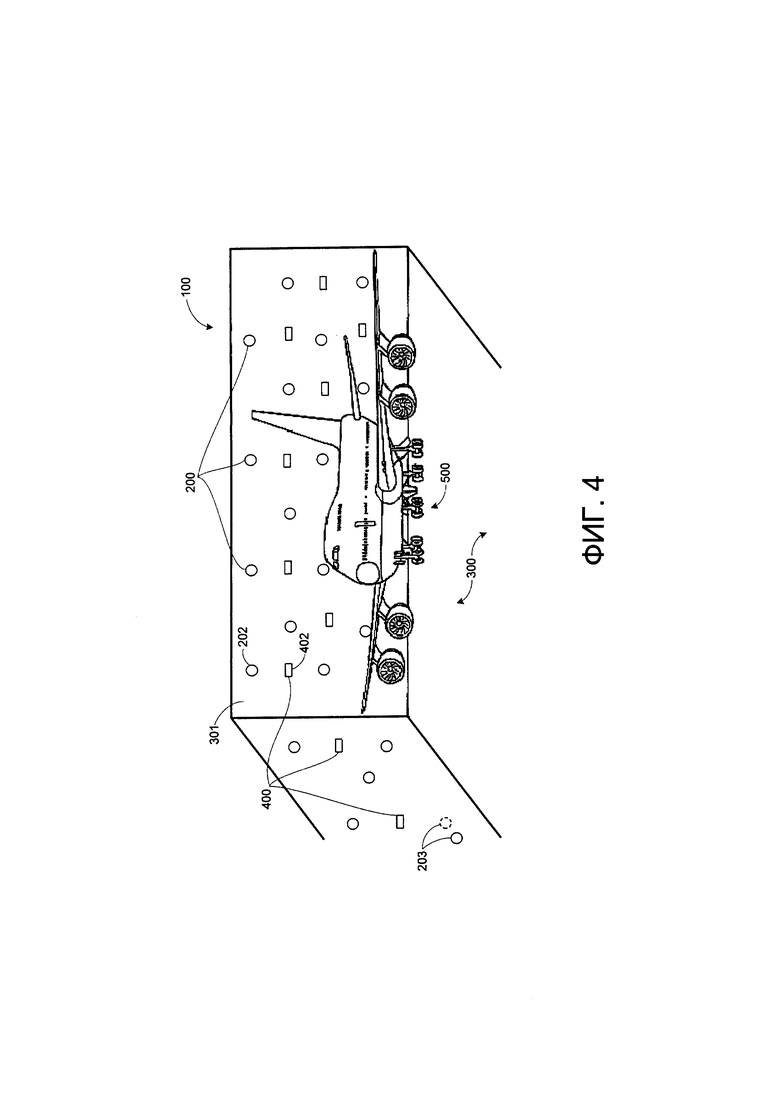
[0013] На ФИГ. 4 показан еще один пример системы определения информации об относительном положении в трехмерном пространстве согласно примерному варианту осуществления.
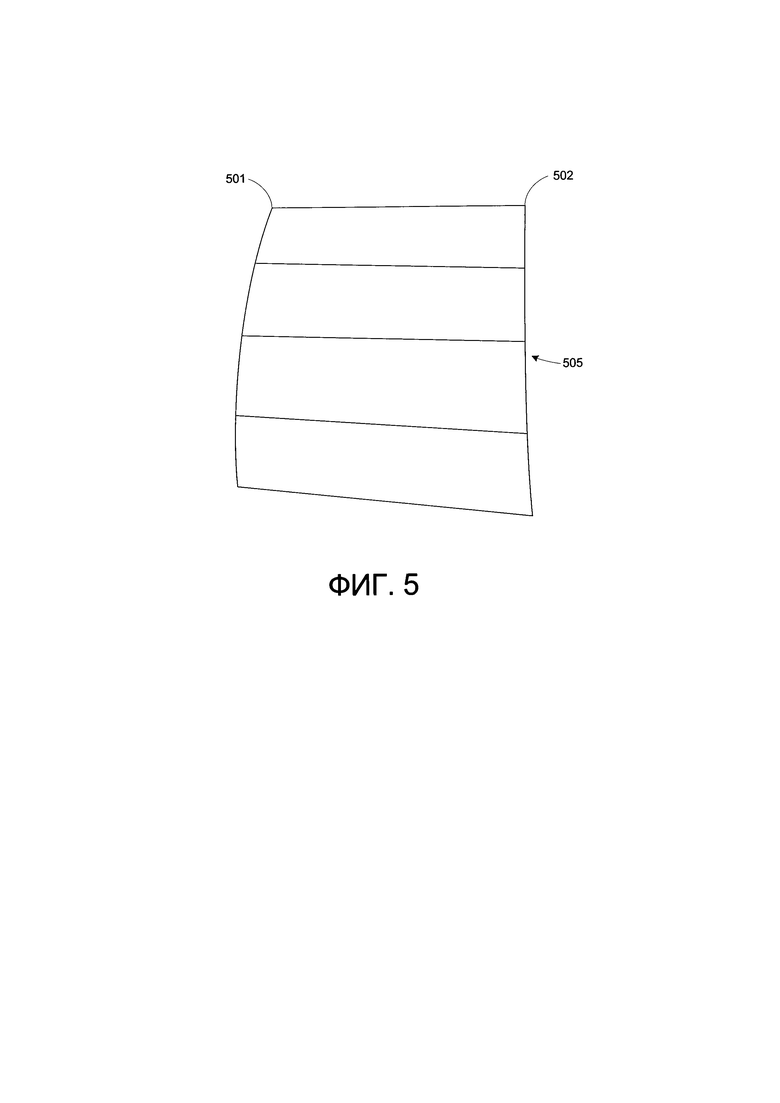
[0014] На ФИГ. 5 показаны первая и вторая целевые точки на объекте согласно примерному варианту осуществления.
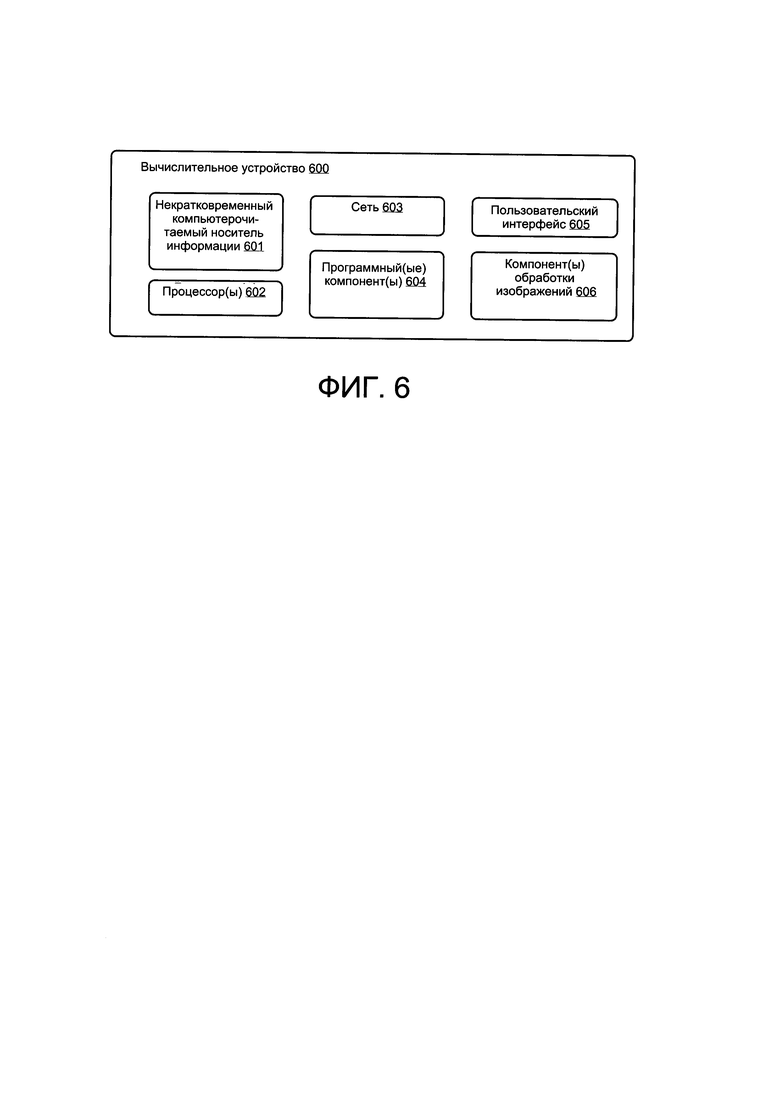
[0015] На ФИГ. 6 показан пример вычислительного устройства согласно примерному варианту осуществления.
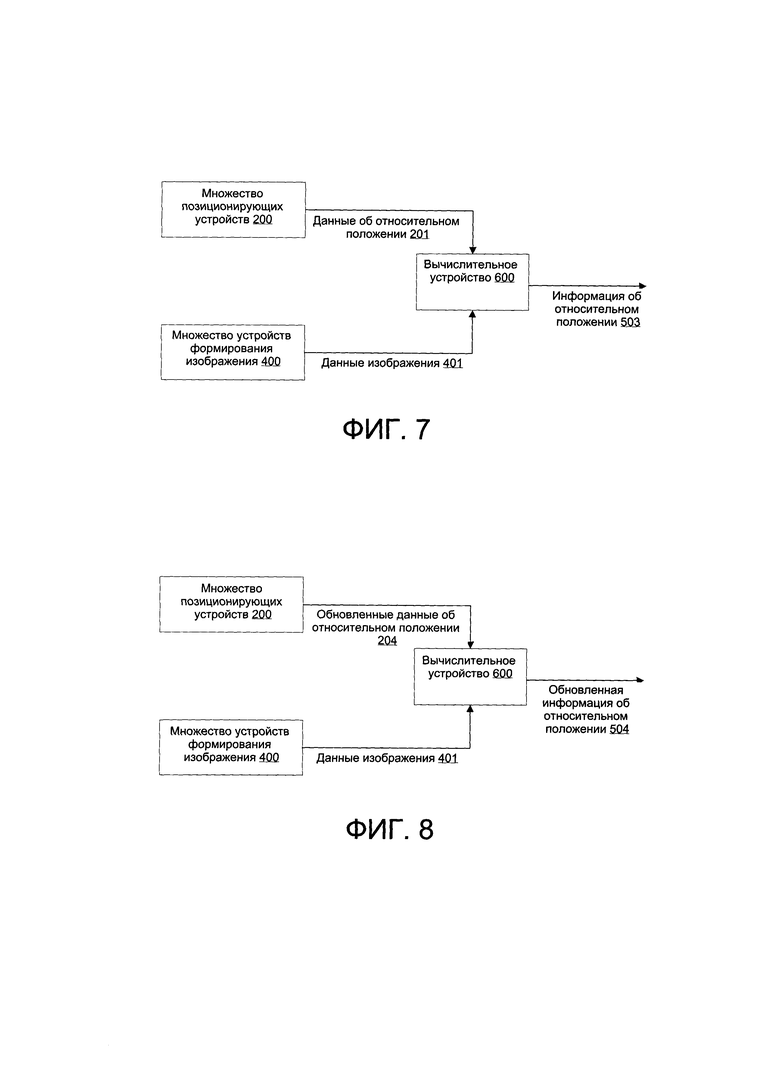
[0016] На ФИГ. 7 показана схема передачи данных согласно примерному варианту осуществления.
[0017] На ФИГ. 8 показана еще одна схема передачи данных согласно примерному варианту осуществления.
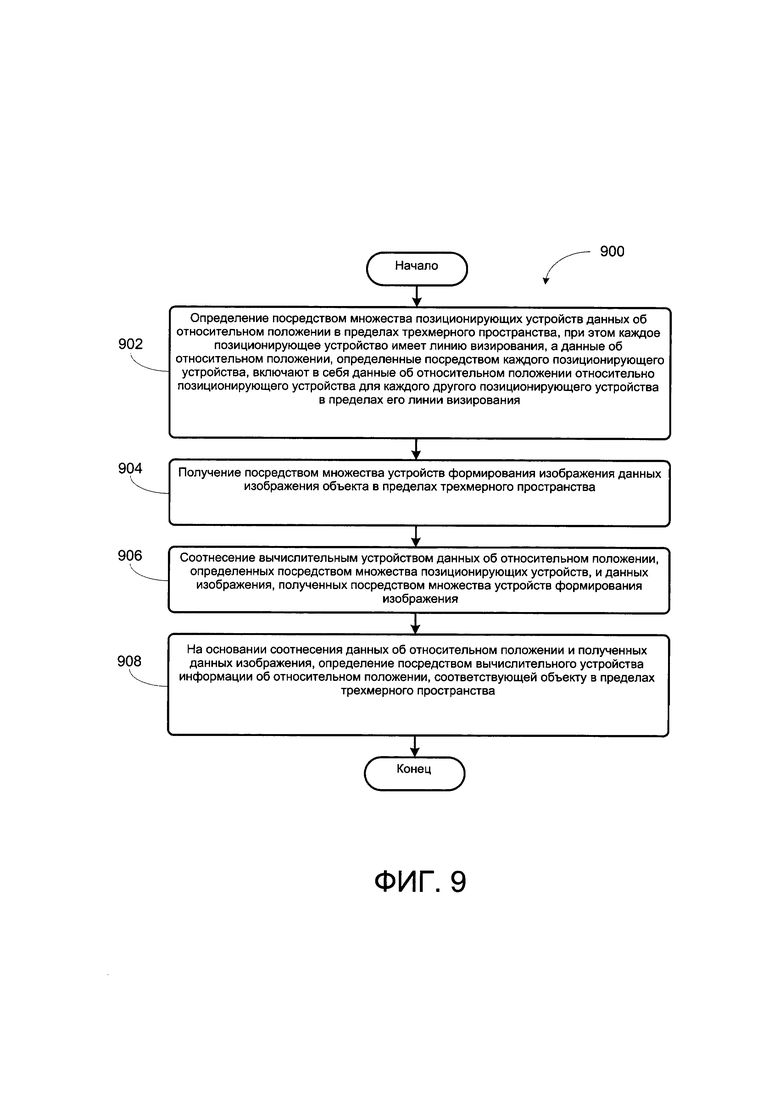
[0018] На ФИГ. 9 показана структурная схема примера способа определения информации об относительном положении в трехмерном пространстве.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
[0019] Раскрытые примеры будут теперь более подробно описаны ниже со ссылкой на прилагаемые чертежи, на которых показаны некоторые, но не все раскрытые примеры. Действительно, могут быть описаны несколько различных примеров, которые не должны рассматриваться как ограниченные изложенными в настоящем документе. Наоборот, эти примеры описаны таким образом, что данное раскрытие изобретения будет исчерпывающим и завершенным и будет полностью представлять объем изобретения специалистам в данной области техники.
[0020] Примеры, раскрытые в настоящем документе, включают в себя систему определения информации об относительном положении в трехмерном пространстве. Система включает в себя множество позиционирующих устройств, каждое из которых определяет положение по отношению к себе других позиционирующих устройств, которые находятся в пределах его линии визирования. Система также включает в себя множество устройств формирования изображения, которые получают данные изображения, соответствующие объекту в пределах указанного трехмерного пространства, например о компонентах летательного аппарата в сборочном пространстве, таком как склад или ангар. Устройства формирования изображения могут быть соединены с позиционирующими устройствами или установлены независимо от них. Вычислительное устройство выполняет соотнесение данных об относительном положении с данными изображения с определением, таким образом, информации об относительном положении, соответствующей указанному объекту.
[0021] При такой конфигурации система не может определять абсолютное положение какого-либо из устройств позиционирования или формирования изображения в пределах указанного трехмерного пространства. Вместо этого, система определяет относительные положения устройств относительно друг друга. При перемещении одного из устройств, вызываемым окружающей средой или другими причинами, изменятся относительные положения, определяемые системой. Однако, поскольку существует несколько измеренных значений для каждого устройства, геометрия системы имеет повышенные математические ограничения. Следовательно, может быть возможным определить посредством расчета, какое устройство переместилось и в какой степени. После расчета и установления перемещений, измеренные значения и информированность об обстановке, обеспечиваемые системой, могут быть перекалиброваны и перенастроены с учетом новых относительных положений устройств позиционирования и формирования изображения.
[0022] Под выражением "около", "по существу" или "приблизительно" со ссылкой на количество или значения измерения подразумевается, что точного получения указанной характеристики, указанного параметра или значения не требуется, и что могут иметь место отклонения или изменения, включая, например, допуски, погрешность измерения, ограничения точности измерения и другие явления, известные специалистам в данной области техники, величина которых не исключает получения технического результата, для обеспечения которого эта характеристика предназначена.
[0023] На ФИГ. 1 показана система 100 определения информации об относительном положении. Система 100 включает в себя множество позиционирующих устройств 200 для определения данных 201 об относительном положении в трехмерном пространстве 300. Каждое позиционирующее устройство в указанном множестве позиционирующих устройств 200, по отдельности представленное в виде позиционирующего устройства 202, в качестве примера, может быть лидарным устройством (light imaging, detection, and ranging, LIDAR). Соответственно, каждое позиционирующее устройство 202 может включать в себя источник света, такой как лазер, и датчик для обнаружения света, такой как фотодиод. Также возможны другие позиционирующие устройства, выполненные с возможностью получения значений последовательных измерений в отдельных точках.
[0024] Трехмерное пространство 300, изображенное на ФИГ. 1, является производственным пространством, используемым для изготовления и сборки объекта 500, такого как летательный аппарат, изображенный на ФИГ. 1. Также возможны другие среды решения поставленных задач, изготовления и иного. Для ясности, вид в перспективе, приведенный на ФИГ. 1, показывает только заднюю стенку и часть одной боковой стенки трехмерного пространства 300. Однако указанное множество позиционирующих устройств 200 может быть распределено по всему трехмерному пространству, и некоторые из них не показаны на ФИГ. 1.
[0025] На ФИГ. 2 приведен еще один вариант реализации системы 100, показанный на виде сверху. В этом случае трехмерное пространство 300 также является производственным пространством, используемым для изготовления и сборки объекта 500, такого как изображенный летательный аппарат. Здесь показано, как указанное множество позиционирующих устройств 200, окружает трехмерное пространство 300. Как отмечено выше, указанное множество позиционирующих устройств 200, показанных на ФИГ. 2, могут включать в себя больше устройств, чем изображено. Например, позиционирующие устройства могут быть установлены на различной высоте по вертикали по всему трехмерному пространству 300, как показано на ФИГ. 1.
[0026] Каждое позиционирующее устройство 202 может быть установлено на конструкции 301 в пределах трехмерного пространства 300, например на наружной стенке, показанной на ФИГ. 1 и 2. Тем не менее, каждое позиционирующее устройство 202 не ограничивается таким расположением. Позиционирующие устройства могут быть установлены в любом количестве промежуточных положений в пределах трехмерного пространства 300, в том числе на потолке или на полу. Как подробно раскрыто ниже, количество позиционирующих устройств, содержащихся в системе 100, может быть значительным. Например, указанное множество позиционирующих устройств 200 может включать в себя от двадцати до ста позиционирующих устройств.
[0027] В пределах трехмерного пространства 300, каждое позиционирующее устройство 202 может иметь линию визирования, представляя все, что его источник света может освещать. Линия визирования каждого позиционирующего устройства может быть ограничена способом или местом, которым или в котором оно установлено. Кроме того, препятствия в пределах производственного пространства могут скрывать области, которые в противном случае находились бы в пределах линии визирования позиционирующего устройства. Например, объект 500 может быть достаточно крупным, так что позиционирующие устройства на противоположных сторонах объекта 500 заблокированы для линий визирования друг друга.
[0028] Данные 201 об относительном положении, определяемые посредством каждого позиционирующего устройства 202, могут включать в себя данные об относительном положении относительно позиционирующего устройства 202 для каждого другого позиционирующего устройства в пределах его линии визирования. Например, в данной системе 100, в которой указанное множество позиционирующих устройств включает в себя тридцать лидарных устройств, каждое позиционирующее устройство 202 может измерять относительное положение двадцати пяти других лидарных устройств с учетом, что некоторые из этих других устройств не находятся в пределах его конкретной линии визирования. И наоборот, каждое из двадцати пяти других лидарных устройств может измерить относительное положение позиционирующего устройства 202 относительно их самих. Аналогичные данные также могут быть определены для каждого другого позиционирующего устройства.
[0029] Благодаря избыточности определения относительного положения каждого позиционирующего устройства 202 система 100 может учитывать перемещения одного или более позиционирующих устройств, даже без абсолютной точки отсчета, которая была бы опорной для производимого определения. Например, как отмечено выше, факторы окружающей среды, такие как влияние температуры, погоды и приливов, могут привести к изменению формы трехмерного пространства 300, а это, в свою очередь, может вызвать перемещение данного позиционирующего устройства 203, как показано на ФИГ. 1. В некоторых случаях влияние окружающей среды, отмеченное выше, может вызвать перемещение более чем одного из позиционирующих устройств. Это может привести к совокупному изменению данных 201 об относительном положении, которое может быть сложно согласовать, если количество позиционирующих устройств является относительно небольшим. Тем не менее, вследствие многочисленности позиционирующих устройств и получаемой избыточности данных 201 об относительном положении система 100 может быть способна определять, какие позиционирующие устройства совершили перемещение и в какой степени.
[0030] Например, система 100 может расположить каждое позиционирующее устройство 202 с координатами (х, у, z) относительно других устройств. Когда одно или более позиционирующих устройств перемещаются, система может использовать один или более алгоритмов для определения на основании взаимных связей между позиционирующими устройствами, какие позиционирующие устройства получают данные об относительном положении, которые не согласуются с остальной частью набора данных. Кроме того, после идентификации данного позиционирующего устройства 203, совершившего перемещение, система 100 может определить величину этого перемещения на основании определенной несогласованности.
[0031] Система 100 также включает в себя множество устройств 400 формирования изображения для получения данных 401 изображения указанного объекта 500 в пределах указанного трехмерного пространства 300. Каждое устройство формирования изображения в указанном множестве устройств 400 формирования изображения, по отдельности представленное как устройство 402 формирования изображения, в качестве примера, может быть камерой. Также возможны другие устройства формирования изображения, такие как лазерные системы визуализации.
[0032] После получения данных 401 изображения они могут быть обработаны с использованием различных методов обработки изображений, с тем чтобы получить данные измерений и другую информацию в реальном времени в отношении объекта 500. Однако если одно или более устройств формирования изображения в указанном множестве устройств 400 формирования изображения перемещается, это может привести к тому, что измеренные значения, определяемые посредством получаемых данных 401 изображения, станут неточными. Как отмечено выше, факторы окружающей среды, такие как влияние температуры, погоды и приливов, могут привести к изменению формы трехмерного пространства 300, что приводит к ошибкам измерения. Например, измеренные значения, основанные на предшествующем положении данного устройства формирования изображения, могут не согласовываться со значениями будущих измерений.
[0033] Следовательно, система 100 может включать в себя вычислительное устройство 600, такое как вычислительное устройство, показанное на ФИГ. 6, выполненное с возможностью соотнесения данных 201 об относительном положении, определяемых посредством указанного множества позиционирующих устройств 200, и данных 401 изображения, получаемых посредством указанного множества устройств 400 формирования изображения, с определением, таким образом, информации 503 об относительном положении, соответствующей указанному объекту 500 в пределах указанного трехмерного пространства 300. Иллюстрация этой передачи данных показана на ФИГ. 7 и подробно раскрыта ниже.
[0034] Вычислительное устройство 600 выполнено с возможностью соотнесения данных 201 об относительном положении и данных 401 изображения рядом способов. Например, вычислительное устройство 600 может определить посредством каждого позиционирующего устройства 202 данные об относительном положении для каждого устройства 402 формирования изображения в указанном множестве устройств 400 формирования изображения. В некоторых вариантах осуществления изобретения, как показано на ФИГ. 1 и 2, каждое устройство 402 формирования изображения в указанном множестве устройств 400 формирования изображения может быть установлено за одно целое с одним из позиционирующих устройств 202 таким образом, что устройство 402 формирования изображения неподвижно относительно позиционирующего устройства 202. При такой конфигурации относительное положение устройства 402 формирования изображения, как определено каждым позиционирующим устройством 202, является таким же, как и положение позиционирующего устройства, на котором оно установлено (или фактически таким же, независимо от расстояния между линзой устройства формирования изображения и установленного с ним фотодиода позиционирующего устройства).
[0035] В отношении ФИГ. 1 и 2, система 100 может не включать в себя устройство 402 формирования изображения для каждого позиционирующего устройства 202. В целом, количество устройств формирования изображения, требуемых для получения необходимых данных измерения и другой информации в отношении объекта 500, может быть определено размером и формой указанного объекта 500. При этом количество позиционирующих устройств может быть основано на степени избыточности, которая необходима для получения точных измеренных значений.
[0036] На ФИГ. 3 показан еще один пример варианта осуществления изобретения, в котором каждое устройство 402 формирования изображения в указанном множестве устройств 400 формирования изображения включает в себя устройство 403 определения местоположения, установленное на указанном устройстве 402 формирования изображения. Устройство 403 определения местоположения может представлять собой, например, световозвращающий отражатель. Это может обеспечивать отражение света, излучаемого источником света каждого позиционирующего устройства 202, назад к его соответствующему фотодиоду. Следовательно, данные 201 об относительном положении, определяемые посредством каждого позиционирующего устройства 202, включают в себя данные об относительном положении относительно позиционирующего устройства 202 для каждого устройства 403 определения местоположения в пределах его линии визирования.
[0037] На ФИГ. 4 показан еще один пример варианта осуществления изобретения, в котором указанное множество устройств 400 формирования изображения отсоединены от указанного множества позиционирующих устройств 200. Кроме того, устройства формирования изображения не включают в себя никакие дополнительные устройства 403 определения местоположения, как показано на ФИГ. 3, и, таким образом, указанное множество позиционирующих устройств 200 не может получать данные об относительном положении для каждого устройства 402 формирования изображения. Тем не менее, вычислительное устройство 600 может определять местоположение указанного множества устройств 400 формирования изображения в пределах указанного трехмерного пространства 300. Например, может быть установлена произвольная система координат исходя из данных 201 об относительном положении, определяемых посредством указанного множества позиционирующих устройств 200.
[0038] В этой ситуации указанное множество устройств 400 формирования изображения не имеет физического совмещения с указанным множеством позиционирующих устройств 200. Иными словами, хотя при решении некоторых задач может быть удобным совместное географическое размещение указанного множества позиционирующих устройств 200 и множества устройств 400 формирования изображения геометрии, для системы 100 требуется только их информационное совмещение друг с другом. Например, вычислительное устройство 600 может способствовать передаче сигналов определения места между указанным множеством позиционирующих устройств 200 и указанным множеством устройств 400 формирования изображения и координированию этих сигналов. В таком примере для указанного множества устройств 400 формирования изображения необходимо только находиться в информационном контакте с сигналами от указанного множества позиционирующих устройств 200. Таким образом, указанное множество устройств 400 формирования изображения может быть расположено в любом требуемом порядке, подходящем для рассматриваемого применения. Даже в варианте осуществления изобретения, в котором указанное множество устройств 400 формирования изображения совмещено с указанным множеством позиционирующих устройств 200, они также могут быть информационно связаны посредством какого-либо передаваемого сигнала.
[0039] На ФИГ. 6 показан пример вычислительного устройства 600, которое может включать в себя некратковременный компьютерочитаемый носитель 601 информации, выполненный с возможностью хранения инструкций, которые являются исполняемыми одним или более процессорами 602. Например, некратковременный компьютерочитаемый носитель 601 информации может представлять собой устройство для хранения данных, в которое могут быть загружены один или более программных компонентов 604, исполняемых процессором (процессорами) 602 для реализации определенных функций. Компоненты) 606 обработки изображений может (могут) обрабатывать получаемые данные 401 изображения, чтобы извлечь требуемую информации. В некоторых случаях, компонент(ы) обработки изображений может (могут) быть подкомпонентом процессора (процессоров) 602.
[0040] Вычислительное устройство 600 также может включать в себя сетевой интерфейс 603, который может быть проводным или беспроводным и который может способствовать передаче данных 201 об относительном положении и данных 401 изображения в вычислительное устройство 600. В этом отношении, вычислительное устройство 600 не обязательно может быть выполнено в виде одного устройства. Вычислительное устройство 600 может включать в себя одно или более локальных устройств, таких как сетевой компьютер или сервер, или может состоять из одного или более удаленных устройств, таких как сервер на основе облачных технологий или группа серверов. Вычислительное устройство 600 также может представлять собой комбинацию локальных и удаленных устройств.
[0041] В завершении, вычислительное устройство 600 может включать в себя пользовательский интерфейс 605 для ввода команд, взаимодействия с данными 201 об относительном положении и данными 401 изображения или вывода информации 503 об относительном положении в отношении объекта 500.
[0042] Информация об относительном положении, определяемая вычислительным устройством 600, может иметь различные формы. Например, данные 401 изображения, получаемые посредством указанного множества устройств 400 формирования изображения могут включать в себя данные изображения для первой целевой точки 501 на указанном объекте 500 и второй целевой точки 502 на указанном объекте 500. На ФИГ. 5 показан пример, который иллюстрирует секцию фюзеляжа 505 из всего объекта 500. Первая целевая точка 501 соответствует верхнему левому углу секции фюзеляжа 505. Схожим образом, вторая целевая точка 502 соответствует верхнему правому углу секции фюзеляжа 505. В этом примере определяемая информация 503 об относительном положении, соответствующая указанному объекту 500, может включать в себя информацию об относительном положении для первой целевой точки 501 относительно второй целевой точки 502. Это дает измерение ширины секции фюзеляжа 505. Информация 503 об относительном положении также может включать в себя другую информацию и может быть использована для любого количества измерений в отношении объекта 500.
[0043] Кроме того, вычислительное устройство может обновлять информацию 503 об относительном положении на основании перемещения одного из позиционирующих устройств или устройств формирования изображения. Например, на основании перемещения данного позиционирующего устройства 203, как показано на ФИГ. 1, 3 и 4, вычислительное устройство 600 может быть выполнено с возможностью определения, посредством каждого другого позиционирующего устройства в пределах линии визирования данного позиционирующего устройства 203, обновленных данных 204 об относительном положении данного позиционирующего устройства 203 относительно указанного другого позиционирующего устройства. Вычислительное устройство 600 также может быть выполнено с возможностью соотнесения обновленных данных 204 об относительном положении и данных 401 изображения, как раскрыто выше, с определением, таким образом, обновленной информации 504 об относительном положении, соответствующей указанному объекту 500 в пределах указанного трехмерного пространства 300.
[0044] На ФИГ. 7 показана схема передачи данных согласно примеру варианта осуществления изобретения. Вычислительное устройство 600 принимает данные 201 об относительном положении от указанного множества позиционирующих устройств 200 и данные 401 изображения от указанного множества устройств 400 формирования изображения. Вычислительное устройство 600 выполняет соотнесение этих данных с определением, таким образом, информации 503 об относительном положении, соответствующей указанному объекту 500. Как отмечено выше, информация 503 об относительном положении может быть выведена на пользовательский интерфейс 605. В других примерах информация 503 об относительном положении может быть использована для дальнейшей обработки. Существуют и другие примеры.
[0045] На ФИГ. 8 показана аналогичная схема передачи данных, которая отражает обновления, которые могут возникнуть при перемещении одного или более позиционирующих устройств. В частности, вычислительное устройство 600 принимает обновленные данные 204 об относительном положении от указанного множества позиционирующих устройств 200. Эти данные соотносят с данными 401 изображения, и вычислительное устройство 600, таким образом, определяет обновленную информацию 504 об относительном положении, соответствующей указанному объекту 500. Кроме того, для примера, показанного на ФИГ. 8, также учитывается, либо в качестве альтернативы, либо в качестве дополнения, что одно из устройств формирования изображения также может перемещаться, как изображено на ФИГ. 1. В этом случае, вычислительное устройство 600 будет принимать обновленные данные изображения от указанного множества устройств 400 формирования изображения, и определять обновленную информацию об относительном положении соответственно.
[0046] На ФИГ. 9 показана структурная схема примера способа 900 определения информации об относительном положении в трехмерном пространстве, согласно примерному варианту осуществления. Способ 900, показанный на ФИГ. 9, представляет пример способа, который, например, может быть использован с системой 100, как показано на ФИГ. 1-8 и раскрыто в настоящем документе. Следует понимать, что для этого и других процессов и способов, раскрытых в настоящем документе, структурные схемы показывают функциональные возможности и работу одного возможного осуществления настоящих примеров. В связи с этим каждый блок может представлять модуль, сегмент или часть программного кода, который включает в себя одну или более инструкций, исполняемых процессором для реализации конкретных логических функций или этапов в этом процессе. Альтернативные варианты реализации включены в объем примеров раскрытия настоящего изобретения, в которых функции могут быть выполнены в порядке, отличном от показанного или описанного, в том числе по существу одновременно или в обратном порядке, в зависимости от включенной функциональности, как будет очевидно специалистам в данной области техники.
[0047] В блоке 902 способ 900 включает в себя определение посредством множества позиционирующих устройств 200 данных 201 об относительном положении в трехмерном пространстве 300. Каждое позиционирующее устройство, по отдельности представленное как позиционирующее устройство 202, в качестве примера, может иметь линию визирования, как раскрыто выше. Кроме того, данные 201 об относительном положении, определяемые посредством каждого позиционирующего устройства 202, включают в себя данные об относительном положении относительно позиционирующего устройства 202 для каждого другого позиционирующего устройства в пределах его линии визирования.
[0048] Как отмечено выше, варианты осуществления изобретения, описанные в настоящем документе, могут включать относительно большое количество позиционирующих устройств, для обеспечения избыточности измерения. Таким образом, определение данных 201 об относительном положении в трехмерном пространстве 300 может включать в себя определение данных 201 об относительном положении в пределах указанного трехмерного пространства 300 посредством позиционирующих устройств в количестве от 20 до 100.
[0049] В блоке 904 способ 900 включает в себя получение данных 401 изображения объекта 500 в пределах указанного трехмерного пространства 300 посредством множества устройств 400 формирования изображения. В некоторых примерах, как показано в вариантах осуществления изобретения, приведенных на ФИГ. 1-3 и раскрытых выше, определение посредством каждого позиционирующего устройства 202 данных 201 об относительном положении может включать в себя определение данных об относительном положении относительно позиционирующего устройства 202 для каждого устройства 402 формирования изображения в пределах его линии визирования.
[0050] Данные об относительном положении для каждого устройства 402 формирования изображения могут быть определены различными способами. Например, способ 900 может включать установку каждого устройства 402 формирования изображения в указанном множестве устройств 400 формирования изображения за одно целое с одним из позиционирующих устройств 202 таким образом, что устройство 402 формирования изображения неподвижно относительно позиционирующего устройства 202.
[0051] Еще в одном варианте осуществления изобретения каждое устройство 402 формирования изображения может включать в себя устройство 403 определения местоположения, установленное на указанном устройстве 402 формирования изображения, как подробно описано выше. В этом случае, определение посредством каждого позиционирующего устройства 202 данных 201 об относительном положении включает в себя определение данных об относительном положении относительно позиционирующего устройства 202 для каждого устройства 403 определения местоположения в пределах его линии визирования.
[0052] В блоке 906 способ 900 включает в себя соотнесение вычислительным устройством 600 данных 201 об относительном положении, определяемых посредством указанного множества позиционирующих устройств 200, и данных 401 изображения, получаемых посредством указанного множества устройств 400 формирования изображения.
[0053] В блоке 908 на основании соотнесения данных об относительном положении, определяемых посредством указанного множества позиционирующих устройств, и данных изображения, получаемых посредством указанного множества устройств формирования изображения, определяют вычислительным устройством информацию об относительном положении, соответствующую указанному объекту в пределах указанного трехмерного пространства
[0054] Как раскрыто выше и как показано на ФИГ. 5, данные 401 изображения, получаемые посредством указанного множества устройств 400 формирования изображения, могут включать в себя данные изображения для первой целевой точки 501 на указанном объекте 500 и второй целевой точки 502 на указанном объекте 500. Кроме того, определение информации 503 об относительном положении, соответствующей указанному объекту 500, может включать в себя определение информации об относительном положении для первой целевой точки 501 относительно второй целевой точки 502.
[0055] Кроме того, способ 900 может включать в себя, на основании перемещения данного позиционирующего устройства 203 в указанном множестве позиционирующих устройств 200, определение, посредством каждого другого позиционирующего устройства в пределах линии визирования данного позиционирующего устройства 203, обновленных данных 204 об относительном положении данного позиционирующего устройства 203 относительно указанного другого позиционирующего устройства. Кроме того, и как отмечено выше, способ может включать в себя соотнесение обновленных данных 204 об относительном положении, определяемых посредством каждого другого позиционирующего устройства, и данных 401 изображения, получаемых посредством указанного множества устройств 400 формирования изображения и, на основании соотнесения обновленных данных 204 об относительном положении и данных 401 изображения, определение обновленной информации 504 об относительном положении, соответствующей указанному объекту 500 в пределах указанного трехмерного пространства 300.
Кроме того, приведенное раскрытие содержит примеры согласно следующим пунктами:
Пункт 1. Система (100) определения информации об относительном положении, содержащая:
множество позиционирующих устройств (200) для определения данных (201) об относительном положении в трехмерном пространстве (300), при этом каждое позиционирующее устройство (202) имеет линию визирования, а данные (201) об относительном положении, определяемые посредством каждого позиционирующего устройства (202), содержат данные об относительном положении относительно позиционирующего устройства (202) для каждого другого позиционирующего устройства в пределах его линии визирования;
множество устройств (400) формирования изображения для получения данных (401) изображения объекта (500) в пределах указанного трехмерного пространства (300); и
вычислительное устройство (600), выполненное с возможностью соотнесения данных (201) об относительном положении, определяемых посредством указанного множества позиционирующих устройств (200), и данных (401) изображения, получаемых посредством указанного множества устройств (400) формирования изображения, с определением, таким образом, информации (503) об относительном положении, соответствующей указанному объекту (500) в пределах указанного трехмерного пространства (300).
Пункт 2. Система по пункту 1, в которой каждое позиционирующее устройство (202) в указанном множестве позиционирующих устройств (200) является лидарным устройством.
Пункт 3. Система по пункту 1, в которой каждое позиционирующее устройство (202) в указанном множестве позиционирующих устройств (200) установлено на конструкции (301) в пределах указанного трехмерного пространства (300), причем
каждое устройство (402) формирования изображения в указанном множестве устройств (400) формирования изображения установлено за одно целое с одним из позиционирующих устройств (202) в указанном множестве позиционирующих устройств (200) таким образом, что устройство (402) формирования изображения неподвижно относительно позиционирующего устройства (202).
Пункт 4. Система по пункту 1, в которой каждое устройство (402) формирования изображения в указанном множестве устройств (400) формирования изображения содержит устройство (403) определения местоположения, установленное на указанном устройстве (402) формирования изображения, причем
данные (201) об относительном положении, определяемые посредством каждого позиционирующего устройства (202), содержат данные об относительном положении относительно позиционирующего устройства (202) для каждого устройства (403) определения местоположения в пределах его линии визирования.
Пункт 5. Система по пункту 1, в которой данные (401) изображения указанного объекта (500), получаемые посредством указанного множества устройств (400) формирования изображения, содержат данные изображения для первой целевой точки (501) на указанном объекте (500) и второй целевой точки (502) на указанном объекте (500), причем
определяемая информация (503) об относительном положении, соответствующей указанному объекту (500), содержит информацию об относительном положении для первой целевой точки (501) относительно второй целевой точки (502).
Пункт 6. Система по пункту 1, в которой указанное множество позиционирующих устройств (200) включает в себя от 20 до 100 позиционирующих устройств.
Пункт 7. Система по пункту 1, в которой, на основании перемещения данного позиционирующего устройства (203) из указанного множества позиционирующих устройств (200), вычислительное устройство (600) выполнено с возможностью определения, посредством каждого другого позиционирующего устройства в пределах линии визирования данного позиционирующего устройства, обновленных данных (204) об относительном положении данного позиционирующего устройства (203) относительно указанного другого позиционирующего устройства, причем
вычислительное устройство (600) также выполнено с возможностью соотнесения обновленных данных (204) об относительном положении и данных (401) изображения, получаемых посредством указанного множества устройств (400) формирования изображения, с определением, таким образом, обновленной информации (504) об относительном положении, соответствующей указанному объекту (500) в пределах указанного трехмерного пространства (300).
Пункт 8. Способ, согласно которому:
определяют посредством множества позиционирующих устройств (200) данные (201) об относительном положении в трехмерном пространстве (300), при этом каждое позиционирующее устройство (202) имеет линию визирования, а данные (201) об относительном положении, определяемые посредством каждого позиционирующего устройства (202), содержат данные об относительном положении относительно позиционирующего устройства (202) для каждого другого позиционирующего устройства в пределах его линии визирования;
получают данные (401) изображения объекта (500) в пределах указанного трехмерного пространства (300) посредством множества устройств (400) формирования изображения;
соотносят вычислительным устройством (600) данные (201) об относительном положении, определяемые посредством указанного множества позиционирующих устройств (200), и данные (401) изображения, получаемые посредством указанного множества устройств (400) формирования изображения; и
на основании соотнесения данных (201) об относительном положении, определяемых посредством указанного множества позиционирующих устройств (200), и данных (401) изображения, получаемых посредством указанного множества устройств (400) формирования изображения, определяют вычислительным устройством (600) информацию (503) об относительном положении, соответствующую указанному объекту (500) в пределах указанного трехмерного пространства (300).
Пункт 9. Способ по пункту 8, согласно которому определение посредством каждого позиционирующего устройства (202) в указанном множестве позиционирующих устройств (200) данных (201) об относительном положении в пределах указанного трехмерного пространства (300) также включает определение данных об относительном положении относительно позиционирующего устройства (202) для каждого устройства (402) формирования изображения в пределах его линии визирования.
Пункт 10. Способ по пункту 8, также включающий установку каждого устройства (402) формирования изображения в указанном множестве устройств (400) формирования изображения за одно целое с одним из позиционирующих устройств (202) в указанном множестве позиционирующих устройств (200) таким образом, что устройство (402) формирования изображения неподвижно относительно позиционирующего устройства (202).
Пункт 11. Способ по пункту 8, согласно которому каждое устройство (402) формирования изображения в указанном множестве устройств (400) формирования изображения, содержит устройство (403) определения местоположения, установленное на указанном устройстве (402) формирования изображения, причем
определение посредством каждого позиционирующего устройства (202) данных (201) об относительном положении в пределах указанного трехмерного пространства (300) также включает определение данных об относительном положении относительно позиционирующего устройства (202) для каждого устройства (403) определения местоположения в пределах его линии визирования.
Пункт 12. Способ по пункту 8, согласно которому данные (401) изображения указанного объекта (500), получаемые посредством указанного множества устройств (400) формирования изображения, содержат данные изображения для первой целевой точки (501) на указанном объекте (500) и второй целевой точки (502) на указанном объекте (500), причем
определение информации (503) об относительном положении, соответствующей указанному объекту (500), включает определение информации об относительном положении для первой целевой точки (501) относительно второй целевой точки (502).
Пункт 13. Способ по пункту 8, согласно которому определение посредством указанного множества позиционирующих устройств (200) данных (201) об относительном положении в пределах указанного трехмерного пространства (300) включает определение данных (201) об относительном положении в пределах указанного трехмерного пространства (300) посредством позиционирующих устройств (202) в количестве от 20 до 100.
Пункт 14. Способ по пункту 8, согласно которому также:
на основании перемещения данного позиционирующего устройства (203) в указанном множестве позиционирующих устройств (200) определяют, посредством каждого другого позиционирующего устройства в пределах линии визирования данного позиционирующего устройства (203), обновленные данные (204) об относительном положении данного позиционирующего устройства (203) относительно указанного другого позиционирующего устройства;
соотносят обновленных данных (204) об относительном положении, определяемые посредством каждого другого позиционирующего устройства, и данные (401) изображения, получаемые посредством указанного множества устройств (400) формирования изображения; и
на основании соотнесения обновленных данных (204) об относительном положении и данных (401) изображения, получаемых указанным множеством устройств (400) формирования изображения, определяют обновленную информацию (504) об относительном положении, соответствующую указанному объекту (500) в пределах указанного трехмерного пространства (300).
Пункт 15. Некратковременный компьютерочитаемый носитель (601) информации, имеющий сохраненные в нем инструкции, которые при их исполнении вычислительным устройством (600), побуждают вычислительное устройство (600) реализовывать функции, согласно которым:
определяют посредством множества позиционирующих устройств (200) данные (201) об относительном положении в трехмерном пространстве (300), при этом каждое позиционирующее устройство (202) имеет линию визирования, а данные (201) об относительном положении, определяемые посредством каждого позиционирующего устройства (202), содержат данные об относительном положении относительно позиционирующего устройства (202) для каждого другого позиционирующего устройства в пределах его линии визирования;
получают данные (401) изображения объекта (500) в пределах указанного трехмерного пространства (300) посредством множества устройств (400) формирования изображения;
соотносят данные (201) об относительном положении, определяемые посредством указанного множества позиционирующих устройств (200), и данные (401) изображения, получаемые посредством указанного множества устройств (400) формирования изображения; и
на основании соотнесения данных (201) об относительном положении, определяемых посредством указанного множества позиционирующих устройств (200), и данных (401) изображения, получаемых посредством указанного множества устройств (400) формирования изображения, определяют информацию (503) об относительном положении, соответствующую указанному объекту (500) в пределах указанного трехмерного пространства (300).
Пункт 16. Некратковременный компьютерочитаемый носитель (601) информации по пункту 15, в котором определение посредством каждого позиционирующего устройства (202) в указанном множестве позиционирующих устройств (200) данных (201) об относительном положении в пределах указанного трехмерного пространства (300) также включает определение посредством каждого позиционирующего устройства (202) данных об относительном положении относительно позиционирующего устройства (202) для каждого устройства (402) формирования изображения в пределах его линии визирования.
Пункт 17. Некратковременный компьютерочитаемый носитель (601) информации по пункту 15, в котором каждое устройство (402) формирования изображения в указанном множестве устройств (400) формирования изображения содержит устройство (403) определения местоположения, установленное на указанном устройстве (402) формирования изображения, а
определение посредством каждого позиционирующего устройства (202) в указанном множестве позиционирующих устройств (200) данных (201) об относительном положении в пределах указанного трехмерного пространства (300) также включает определение данных об относительном положении относительно позиционирующего устройства (202) для каждого устройства (403) определения местоположения в пределах его линии визирования.
Пункт 18. Некратковременный компьютерочитаемый носитель (601) информации по пункту 15, в котором данные (401) изображения указанного объекта (500), получаемые посредством указанного множества устройств (400) формирования изображения, содержат данные изображения для первой целевой точки (501) на указанном объекте (500) и второй целевой точки (502) на указанном объекте (500), причем
определение информации (503) об относительном положении, соответствующей указанному объекту (500), включает определение информации об относительном положении для первой целевой точки (501) относительно второй целевой точки (502).
Пункт 19. Некратковременный компьютерочитаемый носитель (601) информации по пункту 15, в котором определение посредством указанного множества позиционирующих устройств (200) данных (201) об относительном положении в пределах указанного трехмерного пространства (300) включает обуславливаете определения данных (201) об относительном положении в пределах указанного трехмерного пространства (300) посредством позиционирующих устройств (202) в количестве от 20 до 100.
Пункт 20. Некратковременный компьютерочитаемый носитель (601) информации по пункту 15 также содержащий инструкции, которые при их исполнении вычислительным устройством (600), побуждают вычислительное устройство (600) реализовывать функции, согласно которым:
на основании перемещения данного позиционирующего устройства (203) в указанном множестве позиционирующих устройств (200) определяют, посредством каждого другого позиционирующего устройства в пределах линии визирования данного позиционирующего устройства (203), обновленные данные (204) об относительном положении данного позиционирующего устройства (203) относительно указанного другого позиционирующего устройства;
соотносят обновленные данные (204) об относительном положении, определяемых посредством каждого другого позиционирующего устройства, и данные (401) изображения, получаемые посредством указанного множества устройств (400) формирования изображения; и
на основании соотнесения обновленных данных (204) об относительном положении и данных (401) изображения, получаемых указанным множеством устройств (400) формирования изображения, определяют обновленную информацию (504) об относительном положении, соответствующую указанному объекту (500) в пределах указанного трехмерного пространства (300).
Описание различных предпочтительных компоновок представлено в целях иллюстрации и описания, оно не является исчерпывающим или ограниченным вариантами реализации изобретения в раскрытой форме. Многие модификации и вариации окажутся очевидны специалистам в данной области техники. Кроме того, различные предпочтительные примеры могут описывать различные преимущества по сравнению с другими предпочтительными примерам. Выбранный пример или примеры выбраны и описаны для того, чтобы наилучшим образом объяснить принципы примеров, практическое применение и дать возможность другим обычным специалистам в данной области техники понять раскрытие различных примеров с различными модификациями, которые подходят для конкретного рассматриваемого применения.
Изобретение в целом относится к измерительным и позиционирующим системам. Система определения информации об относительном положении содержит множество позиционирующих устройств для определения данных об относительном положении в трехмерном пространстве. Каждое позиционирующее устройство имеет линию визирования, а данные об относительном положении содержат данные об относительном положении относительно позиционирующего устройства для каждого другого позиционирующего устройства в пределах его линии визирования. Система также содержит множество устройств формирования изображения для получения данных изображения объекта в пределах указанного трехмерного пространства и вычислительное устройство, выполненное с возможностью соотнесения данных об относительном положении, получаемых посредством указанного множества устройств формирования изображения. Способ определения информации об относительном положении, согласно которому соотносят вычислительным устройством данные об относительном положении и данные изображения и на основании соотнесения данных об относительном положении и данных изображения определяют вычислительным устройством информацию об относительном положении, соответствующую указанному объекту в пределах указанного трехмерного пространства. Достигается своевременное определение информации о позиционировании. 3 н. и 17 з.п. ф-лы, 9 ил.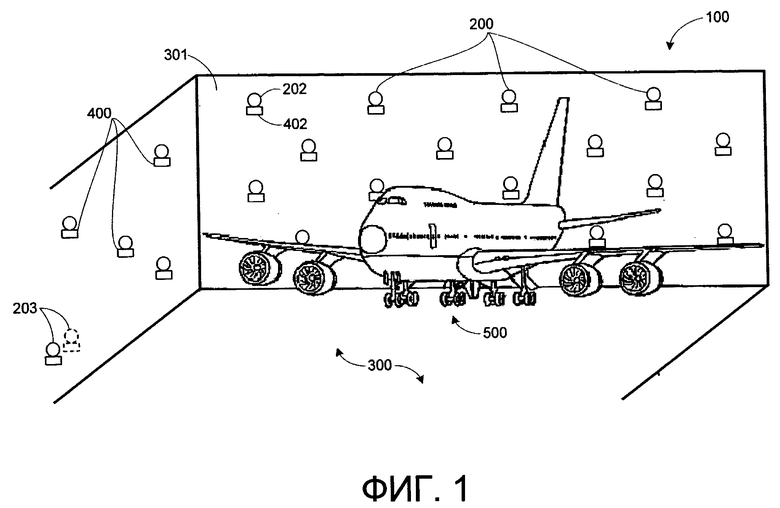
1. Система (100) определения информации об относительном положении, содержащая:
множество позиционирующих устройств (200) для определения данных (201) об относительном положении в трехмерном пространстве (300), при этом каждое позиционирующее устройство (202) имеет линию визирования, а данные (201) об относительном положении, определяемые посредством каждого позиционирующего устройства (202), содержат данные об относительном положении относительно позиционирующего устройства (202) для каждого другого позиционирующего устройства в пределах его линии визирования;
множество устройств (400) формирования изображения для получения данных (401) изображения объекта (500) в пределах указанного трехмерного пространства (300) и
вычислительное устройство (600), выполненное с возможностью соотнесения данных (201) об относительном положении, определяемых посредством указанного множества позиционирующих устройств (200), и данных (401) изображения, получаемых посредством указанного множества устройств (400) формирования изображения, с определением, таким образом, информации (503) об относительном положении, соответствующей указанному объекту (500) в пределах указанного трехмерного пространства (300).
2. Система по п. 1, в которой каждое позиционирующее устройство (202) в указанном множестве позиционирующих устройств (200) является лидарным устройством.
3. Система по п. 1 или 2, в которой каждое позиционирующее устройство (202) в указанном множестве позиционирующих устройств (200) установлено на конструкции (301) в пределах указанного трехмерного пространства (300), причем
каждое устройство (402) формирования изображения в указанном множестве устройств (400) формирования изображения установлено за одно целое с одним из позиционирующих устройств (202) в указанном множестве позиционирующих устройств (200) таким образом, что устройство (402) формирования изображения неподвижно относительно позиционирующего устройства (202).
4. Система по п. 1 или 2, в которой каждое устройство (402) формирования изображения в указанном множестве устройств (400) формирования изображения содержит устройство (403) определения местоположения, установленное на указанном устройстве (402) формирования изображения, причем
данные (201) об относительном положении, определяемые посредством каждого позиционирующего устройства (202), содержат данные об относительном положении относительно позиционирующего устройства (202) для каждого устройства (403) определения местоположения в пределах его линии визирования.
5. Система по п. 1 или 2, в которой данные (401) изображения указанного объекта (500), получаемые посредством указанного множества устройств (400) формирования изображения, содержат данные изображения для первой целевой точки (501) на указанном объекте (500) и второй целевой точки (502) на указанном объекте (500), причем
определяемая информация (503) об относительном положении, соответствующая указанному объекту (500), содержит информацию об относительном положении для первой целевой точки (501) относительно второй целевой точки (502).
6. Система по п. 1 или 2, в которой указанное множество позиционирующих устройств (200) включает в себя от 20 до 100 позиционирующих устройств.
7. Система по п. 1 или 2, в которой, на основании перемещения данного позиционирующего устройства (203) из указанного множества позиционирующих устройств (200), вычислительное устройство (600) выполнено с возможностью определения, посредством каждого другого позиционирующего устройства в пределах линии визирования данного позиционирующего устройства, обновленных данных (204) об относительном положении данного позиционирующего устройства (203) относительно указанного другого позиционирующего устройства, причем
вычислительное устройство (600) также выполнено с возможностью соотнесения обновленных данных (204) об относительном положении и данных (401) изображения, получаемых посредством указанного множества устройств (400) формирования изображения, с определением, таким образом, обновленной информации (504) об относительном положении, соответствующей указанному объекту (500) в пределах указанного трехмерного пространства (300).
8. Способ определения информации об относительном положении, согласно которому:
определяют посредством множества позиционирующих устройств (200) данные (201) об относительном положении в трехмерном пространстве (300), при этом каждое позиционирующее устройство (202) имеет линию визирования, а данные (201) об относительном положении, определяемые посредством каждого позиционирующего устройства (202), содержат данные об относительном положении относительно позиционирующего устройства (202) для каждого другого позиционирующего устройства в пределах его линии визирования;
получают данные (401) изображения объекта (500) в пределах указанного трехмерного пространства (300) посредством множества устройств (400) формирования изображения;
соотносят вычислительным устройством (600) данные (201) об относительном положении, определяемые посредством указанного множества позиционирующих устройств (200), и данные (401) изображения, получаемые посредством указанного множества устройств (400) формирования изображения; и
на основании соотнесения данных (201) об относительном положении, определяемых посредством указанного множества позиционирующих устройств (200), и данных (401) изображения, получаемых посредством указанного множества устройств (400) формирования изображения, определяют вычислительным устройством (600) информацию (503) об относительном положении, соответствующую указанному объекту (500) в пределах указанного трехмерного пространства (300).
9. Способ по п. 8, согласно которому определение посредством каждого позиционирующего устройства (202) в указанном множестве позиционирующих устройств (200) данных (201) об относительном положении в пределах указанного трехмерного пространства (300) также включает определение данных об относительном положении относительно позиционирующего устройства (202) для каждого устройства (402) формирования изображения в пределах его линии визирования.
10. Способ по п. 8 или 9, также включающий установку каждого устройства (402) формирования изображения в указанном множестве устройств (400) формирования изображения за одно целое с одним из позиционирующих устройств (202) в указанном множестве позиционирующих устройств (200) таким образом, что устройство (402) формирования изображения неподвижно относительно позиционирующего устройства (202).
11. Способ по п. 8 или 9, согласно которому каждое устройство (402) формирования изображения в указанном множестве устройств (400) формирования изображения содержит устройство (403) определения местоположения, установленное на указанном устройстве (402) формирования изображения, причем
определение данных (201) об относительном положении в пределах указанного трехмерного пространства (300) посредством каждого позиционирующего устройства (202) также включает определение данных об относительном положении относительно позиционирующего устройства (202) для каждого устройства (403) определения местоположения в пределах его линии визирования.
12. Способ по п. 8 или 9, согласно которому данные (401) изображения указанного объекта (500), получаемые посредством указанного множества устройств (400) формирования изображения, содержат данные изображения для первой целевой точки (501) на указанном объекте (500) и второй целевой точки (502) на указанном объекте (500), причем
определение информации (503) об относительном положении, соответствующей указанному объекту (500), включает определение информации об относительном положении для первой целевой точки (501) относительно второй целевой точки (502).
13. Способ по п. 8 или 9, согласно которому определение данных (201) об относительном положении в пределах указанного трехмерного пространства (300) посредством указанного множества позиционирующих устройств (200) включает определение данных (201) об относительном положении в пределах указанного трехмерного пространства (300) посредством позиционирующих устройств (202) в количестве от 20 до 100.
14. Способ по п. 8 или 9, согласно которому также:
на основании перемещения данного позиционирующего устройства (203) в указанном множестве позиционирующих устройств (200) определяют, посредством каждого другого позиционирующего устройства в пределах линии визирования данного позиционирующего устройства (203), обновленные данные (204) об относительном положении данного позиционирующего устройства (203) относительно указанного другого позиционирующего устройства;
соотносят обновленные данные (204) об относительном положении, определяемые посредством каждого другого позиционирующего устройства, и данные (401) изображения, получаемые посредством указанного множества устройств (400) формирования изображения; и
на основании соотнесения обновленных данных (204) об относительном положении и данных (401) изображения, получаемых указанным множеством устройств (400) формирования изображения, определяют обновленную информацию (504) об относительном положении, соответствующую указанному объекту (500) в пределах указанного трехмерного пространства (300).
15. Некратковременный компьютерочитаемый носитель (601) информации, имеющий сохраненные в нем инструкции, которые при их исполнении вычислительным устройством (600) побуждают вычислительное устройство (600) реализовывать функции, согласно которым:
определяют посредством множества позиционирующих устройств (200) данные (201) об относительном положении в трехмерном пространстве (300), при этом каждое позиционирующее устройство (202) имеет линию визирования, а данные (201) об относительном положении, определяемые посредством каждого позиционирующего устройства (202), содержат данные об относительном положении относительно позиционирующего устройства (202) для каждого другого позиционирующего устройства в пределах его линии визирования;
получают данные (401) изображения объекта (500) в пределах указанного трехмерного пространства (300) посредством множества устройств (400) формирования изображения;
соотносят данные (201) об относительном положении, определяемые посредством указанного множества позиционирующих устройств (200), и данные (401) изображения, получаемые посредством указанного множества устройств (400) формирования изображения; и
на основании соотнесения данных (201) об относительном положении, определяемых посредством указанного множества позиционирующих устройств (200), и данных (401) изображения, получаемых посредством указанного множества устройств (400) формирования изображения, определяют информацию (503) об относительном положении, соответствующую указанному объекту (500) в пределах указанного трехмерного пространства (300).
16. Некратковременный компьютерочитаемый носитель (601) информации по п. 15, в котором определение посредством каждого позиционирующего устройства (202) в указанном множестве позиционирующих устройств (200) данных (201) об относительном положении в пределах указанного трехмерного пространства (300) также включает определение посредством каждого позиционирующего устройства (202) данных об относительном положении относительно позиционирующего устройства (202) для каждого устройства (402) формирования изображения в пределах его линии визирования.
17. Некратковременный компьютерочитаемый носитель (601) информации по п. 15 или 16, в котором каждое устройство (402) формирования изображения в указанном множестве устройств (400) формирования изображения содержит устройство (403) определения местоположения, установленное на указанном устройстве (402) формирования изображения, а
определение посредством каждого позиционирующего устройства (202) в указанном множестве позиционирующих устройств (200) данных (201) об относительном положении в пределах указанного трехмерного пространства (300) также включает определение данных об относительном положении относительно позиционирующего устройства (202) для каждого устройства (403) определения местоположения в пределах его линии визирования.
18. Некратковременный компьютерочитаемый носитель (601) информации по п. 15 или 16, в котором данные (401) изображения указанного объекта (500), получаемые посредством указанного множества устройств (400) формирования изображения, содержат данные изображения для первой целевой точки (501) на указанном объекте (500) и второй целевой точки (502) на указанном объекте (500), причем
определение информации (503) об относительном положении, соответствующей указанному объекту (500), включает определение информации об относительном положении для первой целевой точки (501) относительно второй целевой точки (502).
19. Некратковременный компьютерочитаемый носитель (601) информации по п. 15 или 16, в котором определение данных (201) об относительном положении в пределах указанного трехмерного пространства (300) посредством указанного множества позиционирующих устройств (200) включает обуславливание определения данных (201) об относительном положении в пределах указанного трехмерного пространства (300) посредством позиционирующих устройств (202) в количестве от 20 до 100.
20. Некратковременный компьютерочитаемый носитель (601) информации по п. 15 или 16, также содержащий инструкции, которые при их исполнении вычислительным устройством (600) побуждают вычислительное устройство (600) реализовывать функции, согласно которым:
на основании перемещения данного позиционирующего устройства (203) в указанном множестве позиционирующих устройств (200) определяют, посредством каждого другого позиционирующего устройства в пределах линии визирования данного позиционирующего устройства (203), обновленные данные (204) об относительном положении данного позиционирующего устройства (203) относительно указанного другого позиционирующего устройства;
соотносят обновленные данные (204) об относительном положении, определяемые посредством каждого другого позиционирующего устройства, и данные (401) изображения, получаемые посредством указанного множества устройств (400) формирования изображения; и
на основании соотнесения обновленных данных (204) об относительном положении и данных (401) изображения, получаемых указанным множеством устройств (400) формирования изображения, определяют обновленную информацию (504) об относительном положении, соответствующую указанному объекту (500) в пределах указанного трехмерного пространства (300).
| WO 2014141522 A1, 18.09.2014 | |||
| US 9013543 B1, 21.04.2015 | |||
| US 2015092226 A1, 02.04.2015. |

