Настоящее заявленное изобретение относится к области охраны окружающей среды, в частности способам поиска нефтезагрязнений в донных отложениях водоемов при помощи беспилотных летательных аппаратов. Способ может использоваться при экологическом мониторинге загрязненных водных объектов, для оценки ущерба, нанесенного водному объекту и для планирования очистных работ. Технический результат расширение арсенала средств для поиска нефтезагрязнений в донных отложениях водоемов. Достигается за счет применения беспилотного летательного аппарата в качестве переносчика специального груза - капсул, содержимое которых при взаимодействии с водой в донных отложениях способно поднимать нефтезагрязнения со дна водоема на поверхность посредством флотации.
Из уровня техники известно, что БПЛА-мультикоптеры имеют четное (от 4 до 12) число винтов постоянного шага, каждый из которых приводится в движение собственным двигателем. Половина винтов вращается по часовой стрелке, половина - против. Маневрируют мультикоптеры путем изменения скорости вращения винтов. Микропроцессорная система переводит команды радиоуправления в команды двигателям. Чтобы обеспечить стабильное зависание, БПЛА-мультикоптеров в обязательном порядке снабжают тремя гироскопами, фиксирующими крен аппарата. Как вспомогательный инструмент, иногда, также используется акселерометр, данные от которого позволяют процессору устанавливать абсолютно горизонтальное положение, и бародатчик, который позволяет фиксировать аппарат на нужной высоте. Также, применяют сонар для автоматической посадки и удержания небольшой высоты, а также для облета препятствий. Немаловажно - GPS (ГЛОНАСС) приемник, позволяющий записывать маршрут полета заранее, а также, возвращать аппарат в точку взлета, в случае потери управляющего радиосигнала, или снимать параметры полета оперативно.
Известно также дополнительное оборудование, устанавливающееся в зависимости от целей применения БПЛА-мультикоптера. Наиболее распространенным способом применения БПЛА является аэрофотосъемка. Съемка цифровой фотокамерой позволяет получить фотографии высочайшего разрешения, которые впоследствии подвергаются аналитической обработке.
Известна система надзора за морской инспекцией на основе аэрофотосъемки беспилотного летательного аппарата [1], состоящая из четырех основных частей: терминала сбора данных с беспилотных летательных аппаратов, облачного сервера, корпоративного сервера и клиента. Клиент для ПК и клиент для Android образуют комплексную платформу для наблюдения за беспилотными летательными аппаратами. Функции переадресации доступа к данным в режиме реального времени, управления географической информацией, отслеживания траектории, прямой эфирной видеотрансляции, исторической траектории и воспроизведения видео, статистического анализа данных и управления чрезвычайными ситуациями, надзора в реальном времени с помощью приложения для Android и т.п. может быть достигнут. Морская среда контролируется в режиме реального времени с помощью аэрофотосъемки беспилотного летательного аппарата.
Для обнаружения разливов нефти на поверхности водоемов при помощи БПЛА кроме цифровых применяются инфракрасные камеры и тепловизоры. Съемка в инфракрасном спектре позволяет обнаружить утечки нефти. Такой эффект достигается благодаря тому, что нефть обладает повышенным тепловым излучением, а следовательно на снимках отчетливо видны места утечки углеводородов.
В частности, известен способ обнаружения разливов нефти или нефтепродуктов на поверхности водоема [2], заключающийся в установке тепловизора на беспилотный летательный аппарат, располагаемый в зависшем состоянии над зоной разлива, тепловизор осуществляет съемку в виде ряда цифровых изображений, которые через приемно-передающее устройство беспилотного летательного аппарата передаются в режиме реального времени на пункт круглосуточного дистанционного наблюдения, где оцениваются параметры разлива нефти или нефтепродуктов.
БПЛА нередко применяют в виде части комплексов для мониторинга различных сред. Например, известен мобильный судовой комплекс для экологического контроля водной среды [3], снабженный беспилотным летательным аппаратом, тепловизором, приемником GPS-сигналов, передатчиком и приемником сложных сигналов с фазовой манипуляцией, причем тепловизор, приемник GPS-сигналов и передатчик сложных сигналов с фазовой манипуляцией установлены на беспилотном летательном аппарате, передатчик сложных сигналов с фазовой манипуляцией содержит последовательно подключенные к выходу тепловизора формирователь модулирующего кода, второй вход которого соединен с выходом приемника GPS-сигналов, фазовый манипулятор, второй вход которого соединен с выходом генератора высокочастотных колебаний, усилитель мощности и передающую антенну, приемник сложных сигналов с фазовой манипуляцией установлен на мобильном судовом комплексе и содержит последовательно включенные приемную антенну, усилитель высокой частоты, первый перемножитель, второй вход которого соединен с выходом фильтра нижних частот, узкополосный фильтр, второй перемножитель, второй вход которого соединен с выходом усилителя высокой частоты, фильтр нижних частот и компьютер, с возможностью обнаружения и определения местоположения разливов нефти или нефтепродуктов на поверхности водной среды, передачи их по радиоканалу с использованием сложных сигналов с фазовой манипуляцией в режиме реального времени на мобильный судовой комплекс, где оцениваются параметры разлива нефти или нефтепродуктов, его площадь, скорость и направление распространения с использованием программно-математической обработки, на основании данной информации осуществляется приближение мобильного судового комплекса к месту разлива нефти или нефтепродуктов на поверхности водной среды, сбор и ее последующая утилизация.
Аналогичное решение описано в патенте США «Способ и система управления выбросами углеводородов» [4], имеющие воздушное устройство обнаружения нефтяных пятен на поверхности водоема, способное зависать над нефтяным пятном, проводить измерение толщины нефтяного пятна на месте и передавать сигнал, связанный с толщиной нефтяного пятна, в командный блок. Кроме того, способ может включать определение способа реагирования, частично, на основании толщины нефтяного пятна.
Основным недостатком предложенных технических решений является их ограниченность применения только для нефтезагрязнений, которые находятся на поверхности водоема.
Аналогичными недостатками характеризуется беспилотный летательный аппарат для научно-исследовательского судна, предназначенного для рыбохозяйственных исследований [5], снабженный техническими средствами наблюдения и регистрации, отличающийся тем, что в качестве технических средств наблюдения и регистрации использованы: фотокамера, видеокамера и тепловизор, при этом упомянутые технические средства подключены к предусмотренному на летательном аппарате бортовому компьютеру с программным обеспечением, а бортовой компьютер выполнен с возможностью подключения бесконтактным способом к установленному на судне стационарному компьютеру с программным обеспечением, причем упомянутые технические средства наблюдения и регистрации размещены на единой платформе, прикрепленной к беспилотному летательному аппарату при помощи быстроразъемного соединения. Данное устройство выбрано в качестве прототипа.
Технический результат заявленного изобретения заключается в разработке способа использования обнаружения нефтезагрязнений в донных отложениях водоемов при помощи беспилотных летательных аппаратов с целью расширения арсенала средств для поиска нефтезагрязенений в донных отложениях водоемов.
Поставленная задача решается тем что, способ включает исследование оператором водоема и формирование маршрута из точек обследования, программирование маршрута, снабжение грузом и запуск аэродинамического беспилотного летательного аппарата (БПЛА-1) - мультикоптера с вращающимся крылом вертолетного типа вертикального взлета и посадки, оборудованного блоком приборов для удержания и сброса груза, системой позиционирования, системой удержания заданной высоты, системой возвращения к месту запуска, сброс груза в точках обследования при помощи БПЛА-1, программирование маршрута и запуск аэродинамического БПЛА-2 - мультикоптера с вращающимся крылом вертолетного типа вертикального взлета и посадки, оборудованного системой позиционирования, системой удержания заданной высоты, системой возвращения к месту запуска, цифровой камерой и тепловизором, приемно-передающим устройством, резервным съемным записывающим устройством, передачу в режиме реального времени на персональный компьютер оператора и сохранение на резервном съемном записывающем устройстве записей цифровой камеры и тепловизора, отличающийся тем, что в каждой точке обследования по команде оператора БПЛА-1 сбрасывает груз, представляющий собой набор капсул, каждая из которых содержит водорастворимую оболочку и смесь, образующую большое количество пузырьков газа при контакте с водой, которые поднимают агрегаты нефти из донных отложений на поверхность воды за счет молекулярного прилипания нефтяных углеводородов к границе двух фаз - воздуха и жидкости, после сброса груза БПЛА-1 автоматически продолжает движение к следующей точке обследования по заданному маршруту, где зависает в режиме ожидания, а оператор отдает команду запуска БПЛА-2 и управляет при помощи персонального компьютера аэросъемкой поднятых на поверхность водоема агрегатов нефти, на основании полученных результатов оператор делает вывод о наличии или отсутствии нефтезагрязнений в донных отложениях. Запуск БПЛА-2 осуществляют в соответствии с маршрутом БПЛА-1 с заданным интервалом задержки на отработку действий БПЛА-1.
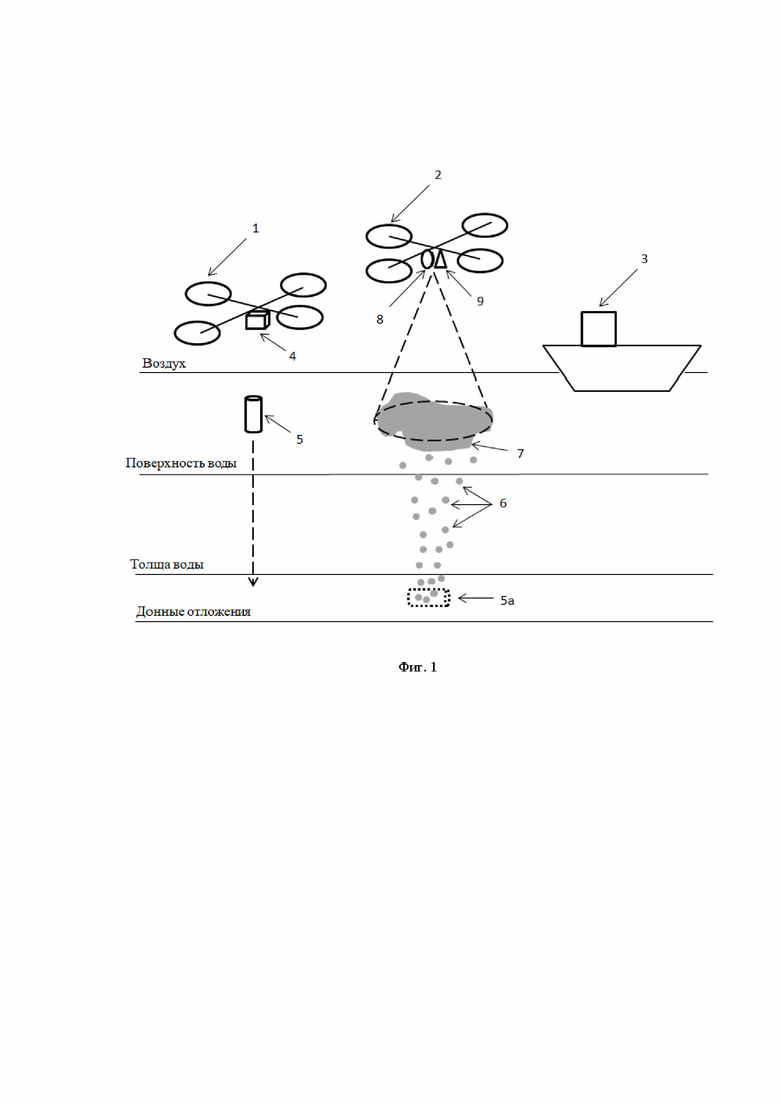
На фиг. 1 представлен процесс последовательных сброса груза БПЛА-1 и съемки поднявшихся со дна водоема на поверхность нефтезагрязнений при помощи БПЛА-2, где обозначены: 1 - БПЛА-1; 2 - БПЛА-2; 3 - рабочее место оператора; 4 - блок приборов для удержания и сброса груза БПЛА-1; 5 - сбрасываемый БПЛА-1 груз - капсула; 5а - сброшенный БПЛА-1 груз - капсула с растворенной оболочкой; 6 - пузырьки газа; 7 - агрегаты нефти на поверхности водоема; 8 - цифровая камера; 9 - тепловизор.
Способ осуществляется следующим образом.
При обследовании водного объекта оператор формирует маршрут из точек обследования, фиксирует их координаты для работы в привязке с системами геопозиционирования ГЛОНАСС/GPS. Оператор управляет аэродинамическим БПЛА-1 (1) с вращающимся крылом вертолетного типа (мультикоптер) вертикального взлета и посадки и аэродинамическим БПЛА-2 (2) с вращающимся крылом вертолетного типа (мультикоптер) вертикального взлета и посадки через программное обеспечение на персональном компьютере из любой удобной позиции (берег, научно-исследовательское судно и т.д.). Рабочее место оператора (3) состоит из программно-аппаратного комплекса предполетной проверки, управления позиционированием, полетом, полезной работой двух и более БПЛА, станции подзарядки БПЛА.
На станции подзарядки оператор программирует маршрут БПЛА-1 (1), снабжает его грузом при помощи блока приборов для удержания и сброса груза БПЛА-1 (4). Груз представляет собой набор капсул (5), каждая из которых содержит водорастворимую оболочку и смесь, образующую большое количество пузырьков газа при контакте с водой.
Запуск БПЛА-1 (1) осуществляется по команде оператора или автоматически.
БПЛА-1 (1) движется в соответствии с маршрутом по сетке станций в начальную точку обследования. БПЛА-1 (1) зависает над точкой обследования с помощью системы удержания заданной высоты и производит сброс груза - не менее одной капсулы (5). Капсула(ы) (5а) опускается на дно, оболочка растворяется, смесь вступает в реакцию с водой, образуя объемную завесу из пузырьков газа (6), которые поднимают агрегаты нефти (7) на поверхность воды по принципу молекулярного прилипания нефтяных углеводородов к границе двух фаз - воздуха и жидкости (флотация).
БПЛА-1 (1) продолжает движение по сетке станций, зависает над точками в режиме ожидания и сбрасывает груз (5) в точках обследования по команде оператора.
Оператор программирует и запускает БПЛА-2 (2) в момент сброса груза БПЛА-1 (1). БПЛА-2 (2) движется в точку сброса капсул(ы) (5), где под управлением оператора с персонального компьютера производится аэросъемка поднявшейся на поверхность нефти при помощи (7) цифровой камеры (8) и тепловизора (9). Записи с цифровой камеры (8) и тепловизора (9) через приемно-передающее устройство БПЛА-2 (2) передаются в режиме реального времени на рабочее место оператора (3) и сохраняются на резервном (дублирующем) съемном записывающем устройстве.
БПЛА-2 (2) продолжает движение в соответствии с маршрутом БПЛА-1 (1) с заданным интервалом задержки на отработку действий БПЛА-1 (1).
После сброса всего груза (5) БПЛА-1 (1) возвращается на станцию подзарядки при помощи системы возвращения к месту запуска или осуществляет посадку на заранее выбранную площадку (в случае пространственно-протяженного водоема).
При снижении заряда батареи одного из БПЛА ниже критического уровня - оба БПЛА возвращаются на станцию подзарядки.
По результатам съемки оператор делает вывод о наличии или отсутствии нефтезагрязнений в донных отложениях точек обследования.
Список использованных источников
1. Патент CN110866991 A, 06.03.2020, «Система надзора за морской инспекцией на основе аэрофотосъемки беспилотного летательного аппарата», МПК G07C 001/20, H04L 029/08, H04N 007/18 / Zhao Dequn, Qu Xinyu. Патентообладатель(и) Beijing University Of Technology.
2. Патент РФ 2622721, 19.06.2017 «Способ обнаружения разливов нефти или нефтепродуктов на поверхности водоема», МПК E02B 15/00, G01N 21/21, G01N 21/35, G01N 33/18 / авторы Пашкевич М.А., Смирнов Ю.Д., Данилов А.С., Анцев В.Г. Патентообладаль(и) Федеральное государственное бюджетное образовательное учреждение высшего образования "Санкт-Петербургский горный университет" (ФГБОУ ВО СПГУ).
3. Патент РФ 2709216, 17.12.2019, «Мобильный судовой комплекс для экологического контроля водной среды», МПК B63B 35/00 / Одаренко О.С., Лобынцев В.В. Патенообладатель(и) Одаренко О.С., Лобынцев В.В.
4. Патент WO2013162790, 31.10.2013, «Метод и система управления выбросами углеводородов», МПК E02B-015/04, G01B-005/06, G01B-011/02, G01B-011/06, G01B-021/08, G01C-011/04, G01C-013/00, G01N-011/12, G01N-013/00, G01N-033/18, G01N-033/28, G06F-019/00 / Nedwed Timothy J, Palandro David A. Патентообладатель(и) Exxonmobil Upstream Research.
5. Патент РФ 159767, 20.02.2016, «Беспилотный летательный аппарат для научно-исследовательского судна, предназначенного для рыбохозяйственных исследований», МПК B64C 39/02, B63B 35/14 / Черноок В.И., Борисовский А.А., Васильев А.Н., Наумов Д.Д., Красавцев В.Е., Коготков С.М., Некрасов В.В. Патентообладатель(и) ткрытое акционерное общество "Научно-исследовательский и проектно-конструкторский институт по развитию и эксплуатации флота" (ОАО "Гипрорыбфлот").
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОБНАРУЖЕНИЯ РАЗЛИВОВ НЕФТИ ИЛИ НЕФТЕПРОДУКТОВ НА ПОВЕРХНОСТИ ВОДОЕМА | 2016 |
|
RU2622721C1 |
| СПОСОБ ОТБОРА ПРОБ ВОДЫ С ПОВЕРХНОСТИ ВОДОЁМА С ИСПОЛЬЗОВАНИЕМ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА (БПЛА) ВЕРТОЛЕТНОГО ТИПА | 2023 |
|
RU2825644C1 |
| Способ ультрамалообъемного опрыскивания сельскохозяйственных растений и устройство для его осуществления с использованием беспилотных авиационных средств вертолетного типа | 2019 |
|
RU2730640C1 |
| СПОСОБ ОБНАРУЖЕНИЯ И ТУШЕНИЯ ПОЖАРОВ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2022 |
|
RU2826399C2 |
| СПОСОБ ПРИМЕНЕНИЯ БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ И УСТРОЙСТВО УПРАВЛЕНИЯ | 2011 |
|
RU2457531C1 |
| Многофункциональное судно обеспечения морских буровых платформ и комплекс судовой системы грузообработки для применения на многофункциональном судне | 2020 |
|
RU2747109C1 |
| Энергонезависимый многоцелевой беспилотный летательный аппарат | 2020 |
|
RU2741825C1 |
| БЕСПИЛОТНАЯ АВИАЦИОННАЯ СИСТЕМА | 2020 |
|
RU2741854C1 |
| Мобильный судовой комплекс для экологического контроля водной среды | 2017 |
|
RU2709216C2 |
| Способ проведения поисково-спасательных работ | 2018 |
|
RU2698893C1 |
Изобретение относится к области охраны окружающей среды, в частности способам поиска нефтезагрязнений в донных отложениях водоемов при помощи беспилотных летательных аппаратов. Способ, включающий исследование оператором водоема, заключается в том, что формируют маршрут из точек обследования, программируют маршрут, снабжают грузом 5 и запускают аэродинамический беспилотный летательный аппарат 1 в виде мультикоптера с вращающимся крылом вертолетного типа вертикального взлета и посадки, оборудованного блоком 4 приборов для удержания и сброса груза, системой позиционирования, системой удержания заданной высоты, системой возвращения к месту запуска, сбрасывают груз 5 в точках обследования при помощи аэродинамического беспилотного летательного аппарата 1. Затем программируют маршрут и запускают аэродинамический беспилотный летательный аппарат 2 в виде мультикоптера с вращающимся крылом вертолетного типа вертикального взлета и посадки, оборудованного системой позиционирования, системой удержания заданной высоты, системой возвращения к месту запуска, цифровой камерой 8, тепловизором 9, приемно-передающим устройством и резервным съемным записывающим устройством. Записи с цифровой камеры 8 и тепловизора 9 в режиме реального времени передают на персональный компьютер оператора и сохраняют на резервном съемном записывающем устройстве. Груз 5, сбрасываемый по команде оператора аэродинамического беспилотного летательного аппарата 1 в каждой точке обследования, представляет собой набор капсул, каждая из которых содержит водорастворимую оболочку и смесь 5а, образующую большое количество пузырьков газа 6 при контакте с водой, которые поднимают агрегаты нефти 7 из донных отложений на поверхность воды за счет молекулярного прилипания нефтяных углеводородов к границе двух фаз - воздуха и жидкости. После сброса груза 5 аэродинамический беспилотный летательный аппарат 1 автоматически продолжает движение к следующей точке обследования по заданному маршруту, где зависает в режиме ожидания, а оператор отдает команду запуска аэродинамического беспилотного летательного аппарата 2 и управляет при помощи персонального компьютера аэросъемкой поднятых на поверхность водоема агрегатов нефти 7. На основании полученных результатов оператор делает вывод о наличии или отсутствии нефтезагрязнений 7 в донных отложениях. Способ позволяет расширить арсенал технических средств для поиска нефтезагрязнений в донных отложениях водоемов. 1 з.п. ф-лы, 1 ил.
1. Способ обнаружения нефтезагрязнений в донных отложениях водоемов при помощи беспилотных летательных аппаратов, включающий исследование оператором водоема и формирование маршрута из точек обследования, программирование маршрута, снабжение грузом и запуск аэродинамического беспилотного летательного аппарата (1) - мультикоптера с вращающимся крылом вертолетного типа вертикального взлета и посадки, оборудованного блоком приборов для удержания и сброса груза, системой позиционирования, системой удержания заданной высоты, системой возвращения к месту запуска, сброс груза в точках обследования при помощи аэродинамического беспилотного летательного аппарата (1), программирование маршрута и запуск аэродинамического беспилотного летательного аппарата (2) - мультикоптера с вращающимся крылом вертолетного типа вертикального взлета и посадки, оборудованного системой позиционирования, системой удержания заданной высоты, системой возвращения к месту запуска, цифровой камерой и тепловизором, приемно-передающим устройством, резервным съемным записывающим устройством, передачу в режиме реального времени на персональный компьютер оператора и сохранение на резервном съемном записывающем устройстве записей цифровой камеры и тепловизора, отличающийся тем, что в каждой точке обследования по команде оператора аэродинамический беспилотный летательный аппарат (1) сбрасывает груз, представляющий собой набор капсул, каждая из которых содержит водорастворимую оболочку и смесь, образующую большое количество пузырьков газа при контакте с водой, которые поднимают агрегаты нефти из донных отложений на поверхность воды за счет молекулярного прилипания нефтяных углеводородов к границе двух фаз - воздуха и жидкости, после сброса груза аэродинамический беспилотный летательный аппарат (1) автоматически продолжает движение к следующей точке обследования по заданному маршруту, где зависает в режиме ожидания, а оператор отдает команду запуска аэродинамического беспилотного летательного аппарата (2) и управляет при помощи персонального компьютера аэросъемкой поднятых на поверхность водоема агрегатов нефти, на основании полученных результатов оператор делает вывод о наличии или отсутствии нефтезагрязнений в донных отложениях.
2. Способ по п.1, отличающийся тем, что запуск аэродинамического беспилотного летательного аппарата (2) осуществляют в соответствии с маршрутом аэродинамического беспилотного летательного аппарата (1) с заданным интервалом задержки на отработку действий аэродинамического беспилотного летательного аппарата (1).
| 0 |
|
SU159767A1 | |
| 0 |
|
SU79519A1 | |
| СПОСОБ ОЧИСТКИ ДОННЫХ ОТЛОЖЕНИЙ ВОДОЕМОВ ОТ НЕФТИ И НЕФТЕПРОДУКТОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2570460C1 |
| ТЕМПЕРАТУРНЫЙ ПЕРМЕАМЕТР | 0 |
|
SU168376A1 |
| Погружаемый электронасос | 1949 |
|
SU81471A1 |
| Многоступенчатая активно-реактивная турбина | 1924 |
|
SU2013A1 |
| CN 110866991 A, 06.03.2020. | |||

