Изобретение относится к летательным аппаратам тяжелее воздуха, в частности к беспилотным летательным аппаратам (БПЛА), и может быть использовано для их применения и управления БПЛА как самолетного, так и вертолетного типов.
В результате развития мирового топливно-энергетического комплекса (ТЭК) количество и масштаб объектов этой отрасли достигли поистине глобального уровня, многократно возросла и сложность эксплуатируемой на них техники и различного специализированного оборудования. Все это привело не только к росту объемов добычи, переработки и транспортировки природных источников энергии - углеводородного сырья, но и повлекло за собой постоянный рост уровня ущерба, наносимого промышленности и экологии в результате неизбежно происходящих в ТЭК аварий разного рода. Кроме того, чрезвычайно высокая степень зависимости национальных экономик и общества большой части государств мира от нормального функционирования топливно-энергетического комплекса сделало его инфраструктуру одной из приоритетных целей для атак террористов и экстремистов.
Наиболее уязвимы при этом оказываются элементы продуктопроводной системы - магистральные нефте- и газопроводы, компрессорные подстанции, газораспределительные станции и крановые площадки, а также хранилища, склады с оборудованием и другие здания, сооружения и объекты. Повреждения, наносимые таким объектам, могут приводить к аварийным ситуациям, крупному экономическому ущербу и серьезному загрязнению окружающей среды. В том числе - сопровождающихся человеческими жертвами.
В этой связи постоянно растет необходимость обеспечения непрерывного мониторинга объектов ТЭК. Однако системы подобного назначения, применяемые сегодня, - наземные, авиационные и космические - не удовлетворяют потребностям потенциальных заказчиков в полном объеме по целому ряду параметров. В частности, по непрерывности наблюдения и разрешающей способности бортовой аппаратуры.
По мнению экспертов, задачи диагностики, охраны и защиты объектов ТЭК могут вполне решить беспилотные авиационные комплексы. Именно современные беспилотные авиационные комплексы (БАК), созданные на базе беспилотных и пилотно-беспилотных летательных аппаратов, вполне могли бы стать экономически и технически приемлемым средством мониторинга наземных объектов на достаточно значительной площади и на большом удалении, да еще и в течение весьма длительного времени. В том числе - круглосуточно и практически в любых климатических условиях.
Все это налагает на БПЛА специфические требования на системы их управления, в частности на подсистемы устойчивости и управляемости, точного определения координат полета, непрерывного мониторинга наблюдаемой поверхности и передачи этих данных на землю.
Дополнительным условием является низкая себестоимость БПЛА, включая систему управления, также надежность в эксплуатации при низкой стоимости обслуживания.
Широко известны израильские БПЛА фирмы Aeronautics двойного назначения, в настоящее время подписан большой контракт на их поставку в Россию.
Их недостатки. Т.к. эти БПЛА двойного назначения, то не могут быть эффективно применены требования по кратности применения, ресурсу и эксплуатационному совершенству.
Известен комплекс бортового оборудования БПЛА фирмы TRANSAS, см. www.TRANSAS.RU, включающий в себя: пилотажно-навигационное оборудование в составе: спутниковую навигационно-инерциальную систему «БИСНС-11», датчик магнитного курса, систему воздушных сигналов, ультразвуковой высотомер;
систему автоматического управления, включающую в себя: автопилот, систему управления полезной нагрузкой, блок управления двигателем;
радиосвязное оборудование, включающее в себя: командную радиолинию и радиолинию передачи данных;
систему электроснабжения, включающую в себя: блок аккумуляторных батарей, электрогенератор, стабилизатор напряжения и выпрямитель тока.
Недостатки: при приемлемых габаритно-массовых характеристиках (ГМХ) не очень высокая точность, так, например, выдача угла курса = 5°, координат = 20 м, накопление погрешности определения координат = 12 м за время полета. Далее довольно приличный вес, в сумме 4,5 кг, что годится для БПЛА средних и более размеров. Если же добавить ИК-камеру, тепловизор, блок ночного наблюдения, то это уже слишком.
Также известен бортовой комплекс БПЛА навигации и управления, см. www.teknol.ru, включающий в себя:
ИНС/СНС интегрированная система: полностью автоматический полет по заданному маршруту;
эффективное парирование ветровых воздействий;
стабилизация углов ориентации БПЛА в полете;
стабилизация видеокамеры;
выдача телеметрической информации о параметрах полета и состояния бортового оборудования;
автоматическое пилотирование вне зоны визуальной видимости;
оперативное изменение маршрута в полете (при наличии канала радиосвязи);
программное управление бортовым оборудованием;
запись параметров движения БПЛА в бортовой накопитель.
Комплекс содержит: инерциальную навигационную систему; приемник спутниковой навигации GPS или ГЛОНАСС; автопилот; накопитель летных данных (опция), датчик воздушной скорости (опция).
Недостатки: набор комплекса не оптимизирован, предназначен для решения очень многих задач, некоторые вообще редко применены, поэтому для решения конкретных задач не нужны.
Известен БПЛА «Пантера» и его система управления, впервые показанный на экране РЕH TV 28.01.10 в программе «Военная тайна».
Этот БПЛА по конструкции интересен тем, что является конвертопланом, т.е. может взлетать и садиться как вертолет и летать как самолет за счет поворота двигателей. Система управления выполнена следующим образом. Оператор на мониторе отслеживает параметры полета: высоту, скорость, текущие координаты полета и наблюдает с помощью видеокамеры и тепловизора, что происходит на поверхности земли, и по их результатам принимает решение о дальнейшем маршруте полета.
Недостатки очевидны: никакой самостоятельности (автономности) полета и в случае выхода из строя радиоканала возвращение в точку взлета проблематично, если вообще возможно, т.к. отсутствует инерциальная система.
Известен БПЛА «Турман» производства республика Беларусь и способ его применения в составе комплекса «ФИЛИН-1», см. ж. «АвиаСоюз» № ноябрь-декабрь 2007 г., стр.50, также см. www.avia.tion.union.ru. - ПРОТОТИП.
Беспилотник «Турман» выполнен из композита по нормальной аэродинамической схеме с прямым крылом и двумя двухбалочными независимыми V-образными стабилизаторами. В хвостовой части фюзеляжа установлен бензиновый поршневой двигатель с толкающим винтом. Универсальность БПЛА «Турман» обусловлена модульной конструкцией аппарата, что позволяет использовать различную по массогабаритным характеристикам и целям нагрузку во внешних сменяемых контейнерах. Это увеличивает возможность многоцелевого применения БПЛА.
Особенностью БПЛА «Турман» является способность взлета с помощью катапульты и парашютной управляемой посадки в перевернутом положении, сохраняя тем самым целевую нагрузку в наружном контейнере в случае неудачного взлета и посадки. При снижении на парашюте типа «крыло» включается система складывания крыла, что улучшает управляемость и сохранность БПЛА «Турман» при посадке.
Комплекс «ФИЛИН-1» предназначен для выполнения задач по оперативно-тактической разведке техническими средствами, обладает большой автономностью и мобильностью. Наличие шести БПЛА в составе комплекса позволяет вести постоянную разведку или целеуказание в районе объекта наблюдения. Комплекс «ФИЛИН-1» решает ряд боевых задач: патрулирование местности в любое время суток; обнаружение и идентификация объектов; передача информации о представляющих угрозу обнаруженных объектах; подавление средств ПВО.
Мониторинг воздушной и наземной обстановки БПЛА связан с просмотром некоторого участка местности и получением информации с помощью фото-, теле-, и видеосистем с сохранением ее на бортовом накопителе. В процессе полета в заданном районе БПЛА по радиоканалу в реальном масштабе времени может передавать разведывательную информацию на модуль системы связи, управления и обработки информации.
Оператор БПЛА оценивает поступающую информацию и по командному радиоканалу управляет самим БПЛА и его целевой нагрузкой, например телевизионной камерой, с целью наилучшего наблюдения неподвижных или движущихся объектов и определения их типа и координат.
Его недостатки: военная направленность, работа по площадям и в пределах прямой радиовидимости каждого БПЛА со станцией управления и наведения, нет связи с GPS или ГЛОНАСС, что не позволяет с высокой точностью лететь по заданному маршруту.
Технической задачей изобретения является повышение эффективности безусловного выполнения полетного задания БПЛА.
Для решения поставленной задачи предлагается Способ применения беспилотных летательных аппаратов, основанный на их адаптации режимов полета, отличающийся тем, что берется "n" БПЛА, где n>3, образующих в полете так называемую "этажерку", первый БПЛА является ведущим, второй и третий ведомыми, причем ведущий БПЛА занимает нижний высотный эшелон, второй БПЛА - промежуточный, третий - верхний, расстояние ведущего БПЛА от земной поверхности определяется безопасностью полета и безусловного выполнения поставленной задачи, например, для контроля газо и нефтепроводов, эта высота равна приблизительно 50 м, второй БПЛА выше ведущего еще на 50 м, третий БПЛА выше второго еще на 50 м; второй БПЛА является ретранслятором данных по радиоканалу от первого БПЛА третьему БПЛА, который также по радиоканалу связан с наземной базовой станцией управления, передавая полученные данные наблюдения ведомого БПЛА и получая команды управления полетом или изменения программы полета; при высоте полета третьего БПЛА≈150 м и при принятой длине газо- нефтепровода между насосными станциями, равной 300 км, верхний третий БПЛА находится в пределах прямой видимости с наземной базовой станцией, что позволяет поддерживать с ним устойчивую связь; при потере одного БПЛА в результате отказа двигателя, столкновения с птицей и пр., оставшиеся два БПЛА успешно выполнят поставленную задачу контроля, при этом любой из оставшихся БПЛА может стать ведомым, а другой займет верхний эшелон 150 м; при достижении половины или более связь "этажерки" передается на соседнюю наземную станцию управления; содержит канал наземного оборудования и канал бортового оборудования, причем канал наземного оборудования содержит: персональный компьютер, модем GSM/GPRS и приемо-передающую антенну, соединенные последовательно; канал бортового оборудования содержит приемники GPS/Глонасс, инерциальную систему, соединенные следующим образом: выходы приемников GPS и Глонасс соединены с первым и вторым входами модема, первый выход инерциальной системы соединен двунаправленной шиной с третьим входом модема, второй выход - с входами управляющих поверхностей БПЛА, выходы специального оборудования - с четвертым входом модема, выход которого через приемо-передающую антенну и радиоканал соединен с каналом наземного оборудования; при "n" БПЛА число радиоканалов связи БПЛА с каналом наземного оборудования также = "n", при этом разделение каналов временное, а управление БПЛА происходит в реальном масштабе времени с каналом наземного оборудования.
На фиг.1 показана структурная схема способа управления БПЛА, которая содержит: 1 и 2 - первая и вторая станции управления БПЛА соответственно, 3 и 4 - первая и вторая насосо-перекачивающие станции, 5, 6 и 7 - первый, второй и третий БПЛА соответственно, 8 - нефтепровод или газопровод (или оба одновременно, назовем трубопровод), 9, 10 и 11 - каналы наблюдения состояния трубопровода первым, вторым или третьим БПЛА соответственно, 12, 13 и 14 - радиоканалы связи второй станции наблюдения с первым, вторым и третьим БПЛА соответственно, 15, 16 и 17 - радиоканалы связи первой станции наблюдения с первым, вторым и третьим БПЛА соответственно, 18 - радиоканал связи первого БПЛА со вторым, 19 - второго с третьим, 20 - первого с третьим, 21 - радиорелейная линия связи между первой и второй станциями наблюдения и между первой и второй насосо-перекачивающими станциями.
На фиг.2 показана структурная схема устройства управления одного БПЛА (УУ БПЛА) и его связь с наземной станцией управления, где изображено: 22 - оператор наземной станцией управления 1, 23 - персональный компьютер (ПС), 24 и 25 - модемы наземной станции и БПЛА соответственно, 26 - микроконтроллер (МС) БПЛА, 27 - инерциальная система БПЛА, 28 - приводы управляющих поверхностей БПЛА (элероны, руль высоты и т.д., также тягой двигателя), 29 и 30 - приемники навигационных сигналов систем GPS и ГЛОНАСС соответственно, 31 - спецоборудование БПЛА: видеокамера, тепловизор, лазерный газоанализатор и др. (может быть самая различная комплектация в зависимости от назначения), связи МС 26 с блоками БПЛА условно не показаны. Модем 25 БПЛА соединен с приемопередающей антенной А2 для связи с наземной станцией управления 1 или 2.
Структурная схема на фиг.1 имеет следующие соединения.
Первая наземная станция управления 1 соединена со второй наземной станцией управления 2 шиной связи 21, например, радиорелейной, также как и соседние насосо-перекачивающие станции 3 и 4. Первый 5, второй 6 и третий 7 БПЛА соединены между собой радиоканалами 18, 19 и 20, а с наземными базовыми станциями 1 и 2 радиоканалами 15, 16 и 17 (с станцией 1) и радиоканалами 12, 13 и 14 (с станцией 2). Также БПЛА 5, 6 и 7 соединены каналами 9, 10 и 11 (средствами) наблюдения с трубопроводом 8.
Устройство управления на фиг.2 имеет следующие соединения. Наземная станция наблюдения 1 (также и станция 2) содержит соединенные последовательно - оператор 22, ПС23, модем 24, приемопередающую антенну А1. БПЛА 5 (также 6 и 7) имеет следующий состав аппаратуры и соединения: МС26 (соединения условно не показаны), выходы приемников GPS29 и ГЛОНАСС 30 соединены с входами модема 25 и с инерциальной системой 27, который двунаправленными шинами соединен с блоком специальной аппаратуры 31 и инерциальной системой 27, выход ее через приводы 28 соединены с управляющими поверхностями БПЛА (элероны, руль направления и пр.).
Известным недостатком существующих систем с одиночным БПЛА является тот факт, что при потере связи с БПЛА, либо самого БПЛА появляются три проблемы:
1. Остается невыполненной поставленная задача.
2. Непонятна причина случившегося.
3. Потерян сам БПЛА.
Проблемы 2 и 3 серьезных последствий не имеют - это всего лишь технические проблемы. Проблема 1 имеет существенное значение, поскольку является проблемой для заказчика.
В случаях, когда выполнение задачи БПЛА имеет приоритетное по отношению к затратам значение, целесообразно создание «облака» - то есть звена из нескольких БПЛА, связанных между собой определенным алгоритмом поддержки и функционирования. Ранее, когда БПЛА обладали высокой стоимостью, концепция «облака» была труднореализуема. Сейчас стоимость отдельного БПЛА имеет устойчивую тенденцию к снижению, поэтому применение «облака» выгодно - во-первых, потому, что вероятность выполнения задачи увеличивается, а во-вторых, потому, что увеличение этой вероятности не приводит к существенному увеличению стоимости решения.
Система управления беспилотным летательным аппаратом (СУ БПЛА) предназначена для контроля и управления БПЛА, а также решения остальных задач, связанных с выполнением БПЛА задания оператора.
СУ БПЛА состоит из наземного и бортового оборудования. В состав наземного оборудования входит персональный компьютер 23 с установленным специализированным ПО и модем 24 GSM/GPRS для приема телеметрической и передачи управляющей информации. Бортовое оборудование состоит из приемника GPS 29/ГЛОНАСС 30, инерциальной системы 27, системы комплексирования, бортового вычислителя МС26, GSM/GPRS модема 25, также спецоборудования 31, управления поверхностями 28.
Основные задачи наземного оборудования СУ БПЛА:
1. Прием GPS/ГЛОНАСС координат от БПЛА и индикация положения БПЛА на мониторе оператора.
2. Задание оператором координат цели (маршрута), высоты и скорости полета и передача этих данных на БПЛА.
3. Передача команды «Взлет» на БПЛА.
4. Обмен информацией с БПЛА в процессе полета.
5. Изменение цели (маршрута) полета в процессе полета.
Назначение бортового оборудования БПЛА:
1. Определение GPS/ГЛОНАСС координат и их передача на наземное оборудование.
2. Прием целевой информации от наземного оборудования.
3. Выполнение команд оператора наземного оборудования.
4. Определение с помощью инерциальной системы своего положения в пространстве, комплексирование полученных данных с показаниями GPS/ГЛОНАСС приемника с целью выполнения полета в автоматическом режиме.
5. Возврат к месту старта при потере сигнала GPS/ГЛОНАСС либо другой неисправности.
Дополнительные возможности использования БПЛА.
1. Поиск лиц, занимающихся террористической либо экстремистской деятельностью.
2. В интересах пограничников - поиск и обнаружение нарушителей границы.
3. В интересах миграционной службы - поиск и обнаружение нелегальных мигрантов, работающих на закрытых объектах.
4. В интересах ГИБДД - обнаружение и предупреждение транспортных коллапсов, оперативный поиск машин, виновных в ДТП.
5. В интересах Госрыбнадзора - поиск браконьеров.
6. В интересах министерства лесного хозяйства - раннее обнаружение и предупреждение пожаров.
7. Поиск, обнаружение и обезвреживание других БПЛА. Известны случаи, когда БПЛА используются террористами для контрабанды или доставки оружия и боеприпасов. Необходимы БПЛА противодействия другим БПЛА.
| название | год | авторы | номер документа |
|---|---|---|---|
| Беспилотная система мониторинга поверхности земли | 2022 |
|
RU2788553C1 |
| КОМПЛЕКС ИЗМЕРЕНИЯ МОЩНОСТИ ИЗЛУЧЕНИЯ БАЗОВЫХ СТАНЦИЙ СОТОВОЙ СВЯЗИ В ВЕРТИКАЛЬНОЙ ПЛОСКОСТИ | 2015 |
|
RU2606344C1 |
| Способ обследования закрытых подземных выработок с применением беспилотных летательных аппаратов | 2018 |
|
RU2708799C1 |
| Интегрированный комплекс бортового оборудования беспилотного летательного аппарата | 2023 |
|
RU2809930C1 |
| Способ дистанционного обследования разрушенных объектов инфраструктуры | 2023 |
|
RU2820176C1 |
| Малогабаритное бортовое радиоэлектронное устройство для управления пилотажно-навигационным комплексом беспилотного летательного аппарата | 2021 |
|
RU2799748C2 |
| Способ неразрушающего инструментального обследования тоннельных канализационных коллекторов | 2018 |
|
RU2712504C1 |
| Интеллектуальная система автоматического дистанционного мониторинга состояния и безопасности высоковольтных ЛЭП с применением беспилотных летательных аппаратов | 2024 |
|
RU2829914C1 |
| СПОСОБ УПРАВЛЕНИЯ БЕСПИЛОТНЫМ ЛЕТАТЕЛЬНЫМ АППАРАТОМ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2008 |
|
RU2390815C1 |
| АВТОМАТИЧЕСКИЙ КОМПЛЕКС ДИСТАНЦИОННОЙ ДИАГНОСТИКИ ЭЛЕКТРОСЕТЕВОГО ОБОРУДОВАНИЯ | 2017 |
|
RU2674550C1 |

Изобретение относится к летательным аппаратам, в частности к беспилотным летательным аппаратам (БПЛА). Техническим результатом является повышение эффективности управления БПЛА. Для этого предложен способ применения беспилотных летательных аппаратов, основанный на их адаптации режимов полета, в котором берется "n" БПЛА, где n>3, образующих в полете так называемую "этажерку", первый БПЛА является ведущим, второй и третий ведомыми, причем ведущий БПЛА занимает нижний высотный эшелон, второй БПЛА - промежуточный, третий - верхний, расстояние ведущего БПЛА от земной поверхности определяется безопасностью полета и безусловного выполнения поставленной задачи, например, для контроля газо и нефтепроводов, эта высота равна приблизительно 50 м, второй БПЛА выше ведущего еще на 50 м, третий БПЛА выше второго еще на 50 м, при этом второй БПЛА является ретранслятором данных по радиоканалу от первого БПЛА третьему БПЛА, который также по радиоканалу связан с наземной базовой станцией управления, передавая полученные данные наблюдения ведомого БПЛА и получая команды управления полетом или изменения программы полета, при высоте полета третьего БПЛА≈150 м и при принятой длине газонефтепровода между насосными станциями, равной 300 км, верхний третий БПЛА находится в пределах прямой видимости с наземной базовой станцией, что позволяет поддерживать с ним устойчивую связь. 4 з.п. ф-лы, 2 ил.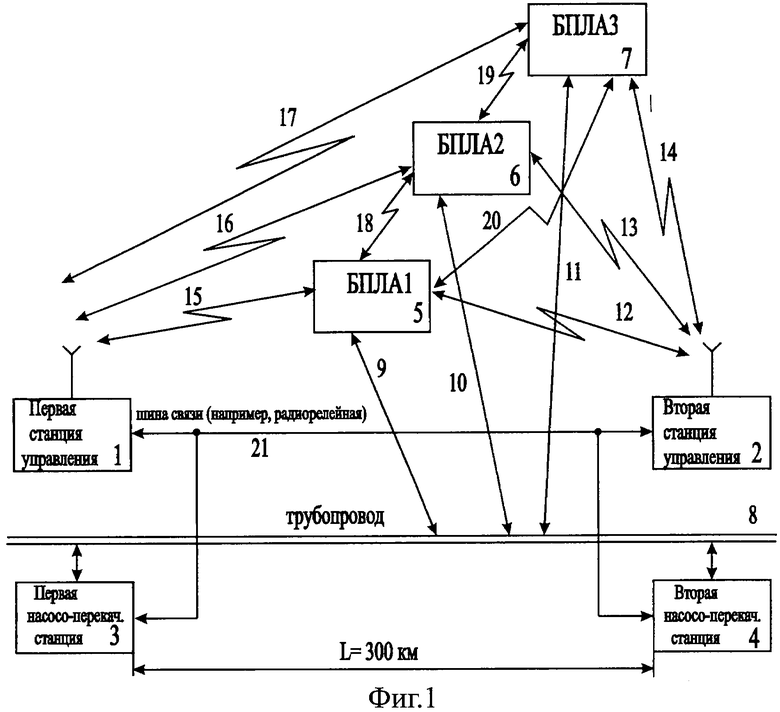
1. Способ применения беспилотных летательных аппаратов, основанный на их адаптации режимов полета, отличающийся тем, что берется n БПЛА, где n>3, образующих в полете так называемую "этажерку", первый БПЛА является ведущим, второй и третий ведомыми, причем ведущий БПЛА занимает нижний высотный эшелон, второй БПЛА - промежуточный, третий - верхний, расстояние ведущего БПЛА от земной поверхности определяется безопасностью полета и безусловного выполнения поставленной задачи, например для контроля газо- и нефтепроводов, эта высота равна приблизительно 50 м, второй БПЛА выше ведущего еще на 50 м, третий БПЛА выше второго еще на 50 м, при этом второй БПЛА является ретранслятором данных по радиоканалу от первого БПЛА третьему БПЛА, который также по радиоканалу связан с наземной базовой станцией управления, передавая полученные данные наблюдения ведомого БПЛА и получая команды управления полетом или изменения программы полета, при высоте полета третьего БПЛА≈150 м и при принятой длине газонефтепровода между насосными станциями, равной 300 км, верхний третий БПЛА находится в пределах прямой видимости с наземной базовой станцией, что позволяет поддерживать с ним устойчивую связь.
2. Способ по п.1, отличающийся тем, что при потере одного БПЛА в результате отказа двигателя, столкновения с птицей и пр. оставшиеся два БПЛА успешно выполнят поставленную задачу контроля, при этом любой из оставшихся БПЛА может стать ведомым, а другой займет верхний эшелон 150 м.
3. Способ по п.1, отличающийся тем, что при достижении половины или более пути между наземными соседними станциями связь "этажерки" передается на соседнюю наземную станцию управления.
4. Способ по п.1, отличающийся тем, что содержит канал наземного оборудования и канал бортового оборудования, причем канал наземного оборудования содержит: персональный компьютер, модем GSM/GPRS и приемопередающую антенну, соединенные последовательно; канал бортового оборудования содержит приемники GPS/Глонасс, инерциальную систему, соединенные следующим образом: выходы приемников GPS и Глонасс соединены с первым и вторым входами модема, первый выход инерциальной системы соединен двунаправленной шиной с третьим входом модема, второй выход - с входами управляющих поверхностей БПЛА, выходы специального оборудования - с четвертым входом модема, выход которого через приемопередающую антенну и радиоканал соединен с каналом наземного оборудования.
5. Способ по п.1, отличающийся тем, что при n БПЛА число радиоканалов связи БПЛА с каналом наземного оборудования также равно n, при этом разделение каналов временное, а управление БПЛА происходит в реальном масштабе времени с каналом наземного оборудования.
| АВТОМАТИЧЕСКИЙ БЕСПИЛОТНЫЙ КОМПЛЕКС ДИАГНОСТИКИ ПРОТЯЖЕННЫХ ОБЪЕКТОВ, ОСНАЩЕННЫХ СОБСТВЕННОЙ ИНФОРМАЦИОННОЙ СИСТЕМОЙ | 2007 |
|
RU2343438C1 |
| Щетка | 1934 |
|
SU44907A1 |
| Установка для непрерывной отмывки тканей из стеклянного волокна от замасливателей | 1955 |
|
SU105032A1 |
| ЕР 1941334 В1, 10.11.2010. | |||

