Изобретение относится к области сельскохозяйственного машиностроения, а именно к режущим аппаратам уборочных машин.
Известен режущий аппарат с круговым движением ножевой полосы (Авт. св. СССР №49569, кл. 45 C 20, опубл. 31.08.1936 г.). Режущий аппарат содержит две ножевые полосы, расположенные друг над другом, которые посредством двух пар эксцентриков, расположенных по краям режущего аппарата, приводятся во вращательное синхронное движение. В качестве носителя ножей использованы шатуны плоского механизма параллелограмма.
Недостаток режущего аппарата заключается в следующем. Звенья параллелограммного механизма занимают два положения, при которых эксцентрики и шатун располагаются на общей прямой линии (так называемые «мертвые положения»). При выходе из мертвых положений параллелограмм может превратиться в антипараллелограмм, а в таком положении он не может использоваться для работы режущего аппарата. В описании режущего аппарата по авт. св. №49569 на фиг. 1 как раз показано такое положение.
Второй недостаток - поскольку концевые эксцентрики должны приводится синхронно, то практическая реализация этого движения существенно усложнит конструкцию привода режущего аппарата.
Наиболее близким техническим решением к предлагаемому устройству является режущий аппарат жатвенных машин (Авт. св. СССР №207528, кл. 45 C 55/00, опубл. 22.12.1967 г., бюл. №2).
Режущий аппарат содержит ножевую полосу и неподвижный пальчатый брус с противорежущими сегментами. На неподвижном брусе шарнирно закреплены два кривошипа с установленными на них противовесами. Подвижный нож связан с пальчатым неподвижным брусом пассивной связью, выполненной в виде кругового паза на пальчатом брусе. По внутренней поверхности этого паза при движении перемещается ролик, насаженный на палец подвижного ножа. Круговой паз в этом режущем аппарате использован для устранения «мертвых положений» шатуна с ножевой полосой.
Недостаток этого режущего аппарата заключается в следующем. Во-первых, круговой паз и движущийся по его внутренней поверхности ролик усложняет конструкцию режущего аппарата и вызывает сомнение в его работоспособности. Поскольку режущий аппарат работает в условиях абразивной пылевидной среде и частиц среза растений, которые, попадая в зону паза, заклинивают ролик в направляющих и приводят к быстрому износу этой пары (в лучшем случае). Изолировать паз и ролик от абразивной среды технически не представляется возможным.
Во-вторых, на одном обороте ведущего кривошипа (ножевой полосы) резание стеблей осуществляется на первой половине оборота, т.е. на угле поворота от 0 до 180°, вторая половина оборота является холостой (без резания стеблей). В результате ножевая полоса будет иметь вращение с неравномерной угловой скоростью, создавая колебания рамы, ухудшая процесс резания, увеличивая нагрузку на детали режущего аппарата, снижая ресурс работы и отрицательно влияя на здоровье оператора жатвенной машины.
В-третьих, наличие зазора ролика в пазу приведет к дополнительным вибрациям (колебаниям) ножевой полосы, что дополнительно существенно ухудшит работу режущего аппарата со всеми отрицательными последствиями.
В четвертых, при большой ширине ножевой полосы (более двух метров) жесткость режущего аппарата трудно обеспечить из-за кольцевого паза и ролика в его пазе, кроме того, в паре ролик-паз увеличатся силы трения, что приведет к увеличению энергозатрат на привод режущего аппарата.
Цель изобретения - устранение неравномерности вращения ножевой полосы, увеличение эффективности работы, надежности и долговечности.
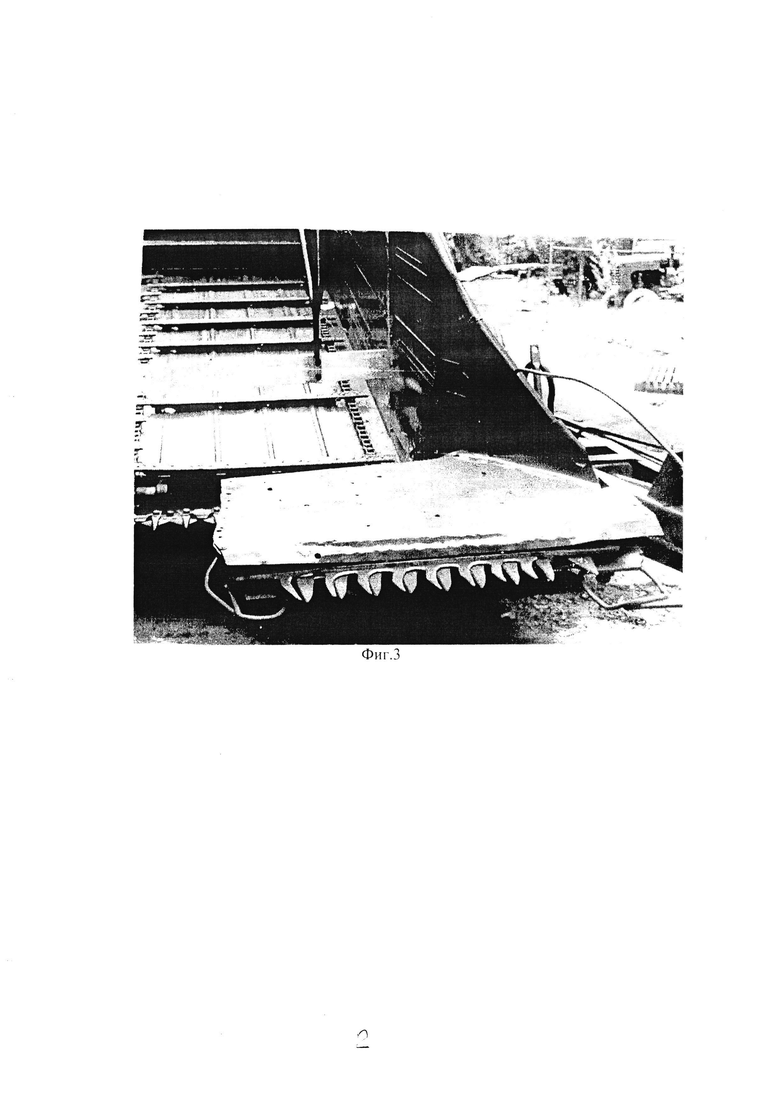
На фиг. 1 схематически изображена схема режущего аппарата, на фиг. 2 - фото экспериментального режущего аппарата, на фиг. 3 - фото режущего аппарата на комбайне КС-1,8.
Отличительными признаками предложенного режущего аппарата в сравнении с прототипом являются:
- в предложенном режущем аппарате пассивная связь выполнена в виде кривошипа, шарнирно связанного с неподвижным брусом и ножевой полосой, в прототипе на неподвижном брусе выполнен круговой паз, внутри которого с зазором размещен ролик, насаженный на палец подвижного ножа;
- привод ножевой полосы в предложенном режущем аппарате осуществляется через два кривошипа и шатун, при этом углы скрещивания осей шарниров ведущего и ведомого кривошипов равны и равны их длины, угол скрещивания осей шарниров шатуна и его длина равны углу скрещивания геометрических осей шарниров стойки и их расстоянию, привод служит для выравнивания угловой скорости ножевой полосы; в прототипе такой привод отсутствует;
- в предложенном режущем аппарате шарниры всех кривошипов гарантированно защищены от абразивной среды, так как оформлены стандартными шарикоподшипниками, которые легко изолируются от загрязнений, в прототипе круговой паз с размещенным внутри роликом изолировать технически невозможно;
- в предложенном режущем аппарате зазоры в шарнирах кривошипов отсутствуют, в прототипе ролик в пазу размещен с зазором, что отрицательно влияет на жесткость ножевой полосы и на работу режущего аппарата.
Указанная цель достигается тем, что в режущем аппарате жатвенных машин, содержащем ножевую полосу и неподвижный пальчатый брус с противорежущими сегментами, на котором шарнирно закреплены два кривошипа с установленными на них противовесами и пассивной связью подвижного ножа с пальчатым неподвижным брусом, пассивная связь выполнена в виде кривошипа, шарнирно связанного с ножевой полосой и неподвижным брусом, при этом шарнир связи с ножевой полосой вынесен с линии концевых шарниров ножевой полосы на расстояние 

Режущий аппарат снабжен передаточным механизмом, состоящим из двух кривошипов и шатуна, при этом кривошипы имеют одинаковый угол скрещивания между геометрическими осями их шарниров и кратчайшее расстояние между шарнирами, а угол скрещивания осей шарниров шатуна и длина его равны углу скрещивания геометрических осей шарниров стойки и расстоянию между ними, и параметры связаны соотношением
Режущий аппарат (фиг. 1) включает подвижную ножевую полосу 1, на которой закреплены режущие ножи-сегменты 2, неподвижный противорежущий брус 3 с противорежущими сегментами. На концах противорежущего бруса 3 шарнирно установлены два кривошипа 4 и 5 с закрепленными на них противовесами 6. Кривошипы 4 и 5 шарнирно соединены с подвижной ножевой полосой 1. В режущем аппарате пассивная связь выполнена в виде третьего кривошипа 7, равного по параметрам двум кривошипам 4 и 5. Кривошип 7 шарнирно связан с рычагом 8 подвижной ножевой полосы 1, при этом длина
Все шарнирные соединения звеньев оформлены стандартными подшипниками качения, которые легко изолируются от абразивной среды и пыли.
Режущий аппарат снабжен приводным механизмом, включающим ведомый 9 и ведущий 10 кривошипы, шатун 11 и стойку 12. Кривошипы 9 и 10 имеют одинаковый угол скрещивания геометрических осей их шарниров, т.е. α9=α10 и кратчайшее расстояние между этими осями, т.е. 
Шатун 11 имеет угол скрещивания осей шарниров α11, равный углу α12 скрещивания осей шарниров стойки 12 (осей вращения валов кривошипов 9 и 10). Длина шатуна 

Параметры механизма связаны соотношением

Устройство работает следующим образом. От вала отбора мощности или другого источника привода движение передается ведущему кривошипу 10, шатуну 11 и ведомому кривошипу 9. Поскольку вал ведомого кривошипа 9 жестко соединен с валом кривошипом 7, который шарнирно соединен с рычагом 8 ножевой подвижной полосы 1, то круговое движение передается ножевой полосе 1 и концевым кривошипам 4 и 5. Сегменты 2 срезают стебли, попадающие в раствор сегментов противорежущего бруса при первой половине оборота ножевой полосы, вторая половина оборота ножевой полосы является холостой.
При резании стеблей угловая скорость ножевой полосы снижается, затем при холостом ходе увеличивается, в результате вращение ножевой полосы будет неравномерным.
Степень неравномерности вращения ножевой полосы определяется выражением

где P - усилие резания стеблей, H;
r - радиус вращения кривошипов, м;
ϕ1,2 – углы, в пределах которых происходит резание стеблей;
J - момент инерции вращающихся звеньев, кг⋅м2;
ω - угловая скорость вращения ножевой полосы, с-1.
От неравномерного вращения ножевой полосы на раму режущего аппарата будет действовать момент, определяемый выражением

здесь первое слагаемое Pr/π - активный момент, величина которого постоянна; Prsinϕ - момент от сил резания стеблей; ξJ - момент от неравномерного вращения ножевой полосы с кривошипами. В результате рама режущего аппарата под действием этого момента будет совершать колебательные движения, которые отрицательно действуют на прочность, долговечность деталей, и на работу режущего аппарата в целом. Закон изменения угловой скорости ножевой полосы, следовательно, и момента близок к синусоидальному характеру.
Переменный момент, действующий на раму, необходимо уменьшить, для этой цели использован передаточный механизм, состоящий из двух кривошипов 9 и 10, шатуна 11 и стойки 12. Этот механизм имеет особую структуру звеньев и соотношение параметров. Так, ведущий 10 и ведомый 9 кривошипы имеют скрещенные геометрические оси шарниров под углом α10 и α9, которые равны, т.е. α10=α9, равны при этом и кратчайшие расстояния между их осями (длины кривошипов), т.е. 
Шатун 11 и стойка 12 имеют также скрещенные геометрические оси шарниров под углом α11 и α12, которые равны друг другу, т.е. α11=α12, равны и кратчайшие расстояния между этими осями шарниров, т.е. 
Угловые и линейные параметры связаны соотношением (1)
За счет такого особого расположения осей шарниров кривошипов и шатуна со стойкой при вращении ведущего кривошипа 10 с постоянной угловой скоростью, ведомый кривошип 9 будет иметь переменную на одном обороте угловую скорость, определяемую выражением

где a=1-cosα10⋅cosα11, в=sinα10⋅sinα11, c=cosα11-cosα10.
Степень неравномерности вращения ведомого кривошипа равна

Закон изменения угловой скорости ведомого кривошипа механизма подобен закону изменения угловой скорости ножевой полосы режущего аппарата. Таким образом, если соединить ведомый кривошип 9 механизма с ведущим кривошипом 7 режущего аппарата, то произойдет сложение угловых скоростей ведомого кривошипа и ведущего кривошипа режущего аппарата и ножевая полоса при резании будет вращаться практически с постоянной угловой скоростью и момент, действующий на раму, будет практически отсутствовать.
Для осуществления указанного способа выравнивания необходимо сначала определить степень неравномерности 5 вращения ножевой полосы режущего аппарата по выражению (2), а затем по найденному значению 6 спроектировать передаточный механизм, т.е. найти параметры его звеньев.
Руководствуясь конструктивными соображениями, необходимо задаться параметрами стойки 12 механизма, т.е. α12 и 


Угол скрещивания осей шарниров кривошипов определится выражением

Для определения длины кривошипов используем выражение (1), из которого имеем

Таким образом, выражения (6 и 7) определяют параметры кривошипов 10 и 9 механизма для выравнивания момента, действующего на раму режущего аппарата.
Пример конструктивного воплощения режущего аппарата
Спроектируем режущий аппарат для резания стеблей кукурузы на силос. Принята ширина 


При принятых параметрах режущего аппарата и усилии резания 1920 H степень неравномерности вращения ножевой полосы при работе определится по формуле (2)

Далее по степени δ=0,568 неравномерности вращения ножевой полосы необходимо спроектировать передаточный двухкривошипный механизм, у которого степень неравномерности ведомого кривошипа была бы равна 0,568. Исходя из конструктивных соображений и условий расположения вала источника привода у силосоуборочного комбайна КС 1,8 примем угол α11(12) скрещивания осей шарниров шатуна 11 и стойки 12 равным 45° и длину 
По степени неравномерности δ=0,568 режущего аппарата и углу скрещивания α11(12)=45° геометрических осей шарниров шатуна 11 и стойки 12 определяются недостающие параметры кривошипов 9 и 10, т.е. угол скрещивания осей шарниров α9(10) и длину кривошипов 

Первое значение угла
 .
.
Второе значение угла
 .
.
Длина кривошипа при первом значении угла 6,63° определяется по выражению (7)
 .
.
Длина при втором значении угла 37,17° составит
 .
.
Таким образом, приводной двухкривошипный механизм для выравнивания угловой скорости (момента, действующего на раму) имеет параметры кривошипов 9, 10 и шатуна 11 (стойки 12) в двух вариантах. Первый вариант: α9=α10=6,63°; α11=α12=45°; 

второй вариант: α9=α10=37,17°; α11=α12=45°; 

Правильность определения параметров передаточного механизм можно определить по формуле (5); которая определяет степень неравномерности δ передаточного механизма, эта степень должна равняться степени неравномерности ножевой полосы:
для первого варианта параметров механизма,

для второго варианта параметров механизма,

Как видно из определения степени неравномерности передаточного механизма, параметры как первого, так и второго вариантов обеспечивают такую же неравномерность 0,569 и 0,568 как и у ножевой полосы режущего аппарата 0,568, следовательно, ножевая полоса будет иметь при работе постоянную угловую скорость вращения и колебания на раму воздействовать не будут. Выбор варианта параметров зависит от технологии изготовления кривошипов, шатуна и стойки. Предпочтение можно отдать первому варианту параметров механизма, поскольку здесь небольшая длина кривошипов, следовательно, малая масса их.
На фиг. 2 представлено фото экспериментального режущего аппарата с параметрами кривошипов первого варианта, т.е. α9=α10=6,63°; α11=α12=45°; 

На фиг. 3 показано фото экспериментального режущего аппарата смонтированного на силосоуборочном комбайне КС-1,8, ширина ножевой полосы принята 0,9 м, т.е. равна половине ширины режущего аппарата КС-1,8. Это сделано для сравнения срезания стеблей кукурузы стандартным режущим аппаратом и экспериментальным.
Производственные полевые испытания полностью подтвердили эффективность экспериментального режущего аппарата, как по качеству среза, так и по качеству динамики работы.
| название | год | авторы | номер документа |
|---|---|---|---|
| Режущий аппарат для сельскохозяйственных культур | 1981 |
|
SU967353A1 |
| Режущий аппарат для сельскохозяйственных культур | 1979 |
|
SU869649A1 |
| УСТРОЙСТВО ДЛЯ ТРЕНИРОВКИ ВЕСТИБУЛЯРНОГО АППАРАТА | 2015 |
|
RU2602056C2 |
| УСТРОЙСТВО ДЛЯ ПЕРЕМЕШИВАНИЯ ЖИДКОСТЕЙ | 2016 |
|
RU2633902C1 |
| ШЕСТИЗВЕННЫЙ ШАРНИРНО-РЫЧАЖНЫЙ МЕХАНИЗМ | 2019 |
|
RU2713662C1 |
| ШАРНИРНО-РЫЧАЖНЫЙ МЕХАНИЗМ | 2015 |
|
RU2605955C1 |
| Шарнирно-рычажный механизм | 1979 |
|
SU947535A1 |
| УСТРОЙСТВО ДЛЯ УПЛОТНЕНИЯ ГРУНТА | 2015 |
|
RU2583802C1 |
| Устройство для расчесывания меховых шкурок | 1987 |
|
SU1472513A1 |
| Устройство для тренировки вестибулярного аппарата | 1987 |
|
SU1535558A1 |
Изобретение относится к сельскохозяйственному машиностроению. Режущий аппарат содержит подвижную ножевую полосу и неподвижный пальчатый брус с противорежущими сегментами. На неподвижном пальчатом брусе шарнирно закреплены два кривошипа с установленными на них противовесами. Пассивная связь ножевой полосы с неподвижным пальчатым брусом выполнена в виде третьего кривошипа, шарнирно связанного с ножевой полосой и неподвижным брусом. Шарнир связи с ножевой полосой вынесен с линии концевых шарниров ножевой полосы на расстояние 

1. Режущий аппарат жатвенных машин, содержащий ножевую полосу и неподвижный пальчатый брус с противорежущими сегментами, на котором шарнирно закреплены два кривошипа с установленными на них противовесами и пассивной связью подвижного ножа с пальчатым неподвижным брусом, отличающийся тем, что, с целью увеличения эффективности работы, надежности и долговечности, устранения неравномерности вращения ножевой полосы, пассивная связь выполнена в виде кривошипа, шарнирно связанного с ножевой полосой и неподвижным брусом, при этом шарнир связи с ножевой полосой вынесен с линии концевых шарниров ножевой полосы на расстояние 

2. Режущий аппарат по п. 1, отличающийся тем, что он снабжен передаточным механизмом, состоящим из двух кривошипов, шатуна и стойки, при этом кривошипы имеют одинаковый угол скрещивания между геометрическими осями их шарниров и кратчайшее расстояние между шарнирами, а угол скрещивания осей шарниров шатуна и длина его равны углу скрещивания геометрических осей шарниров стойки и расстоянию между ними и параметры связаны соотношением,
| РЕЖУЩИЙ АППАРАТ ЖАТВЕННЫХ МАШИН | 0 |
|
SU207528A1 |
| Привод режущего аппарата | 1990 |
|
SU1762788A1 |
| ПРИВОД РЕЖУЩЕГО АППАРАТА | 2002 |
|
RU2206196C1 |
| Привод ножа режущего аппарата | 1987 |
|
SU1496681A1 |
| US 4813291 A, 21.03.1989. | |||

