ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Настоящее изобретение относится к робототехнике, в частности, к способу планирования движения робота в области допустимого движения на плоскости, а также к мобильному роботу с возможностью осуществления данного способа.
УРОВЕНЬ ТЕХНИКИ
Планирование движения робота является одной из основных задач мобильной робототехники. Целью планирования является выбор траекторий, удовлетворяющих одновременно критериям оптимальности (например, для достижения минимального расстояния и/или времени движения) и безопасности, т.е. позволяющих избежать столкновений робота с препятствиями. В этой области создано множество решений, включая различные решения по планированию траекторий движения роботов в некоторой области допустимого движения на плоскости, например, на территории складского помещения. В рамках области допустимого движения появление и исчезновение статических препятствий является достаточно редким событием. В свою очередь, пространство вне этой области с большой вероятностью содержит статические препятствия, являющиеся постоянными для рассматриваемого окружения.
Предполагается, что робот имеет одно ведущее колесо или его модель может быть сведена к модели с одним ведущим колесом, проскальзыванием которого можно пренебречь. Также предполагается, что робот оснащен датчиками безопасности, которые в режиме реального времени проверяют наличие препятствий в некоторой зоне области видимости, определяемой углом поворота и скоростью ведущего колеса, далее называемой «зоной безопасности». При обнаружении препятствия в зоне безопасности датчик соответствующим образом ограничивает скорость движения робота. В связи с тем, что количество различных зон безопасности конечно, каждая из них соответствует диапазону скоростей и углов поворота колеса, а вводимые при обнаружении в ней препятствия ограничения скорости соответствуют наихудшему случаю. Робот дополнительно оснащен датчиками превентивного обнаружения препятствий, также работающими в режиме реального времени, области видимости которых превосходят области видимости датчиков безопасности робота.
Классические способы планирования движения мобильного робота основаны на построении в области допустимого движения оптимальных траекторий, например, с помощью таких алгоритмов, как А* и PRM (probalistic roadmap – вероятностные дорожные карты), с учетом габаритов робота для безопасного обхода препятствий.
Однако применение такого подхода приводит к тому, что в ходе запланированного движения робот может оказаться вблизи границы области допустимого движения, имея большую скорость. При этом зоны, проверяемые датчиками безопасности, могут выходить за границу области допустимого движения, где датчики безопасности робота с большой вероятностью обнаружат препятствия и ограничат скорость движения робота.
Ситуация, аналогичная вышеописанной, происходит при объезде статических препятствий, расположенных вблизи построенной исходя из собственных габаритов робота траектории в допустимой области движения: робот, приближаясь к препятствию на большой скорости, резко сбрасывал её вследствие срабатывания датчиков безопасности.
Подобные решения, основанные на классическом методе учета габаритов робота при планировании траектории, имеют несколько недостатков: во-первых, отсутствие учета снижения скорости на этапе выбора траектории движения приводит к нахождению неоптимальных по времени решений; во-вторых, движение робота перестает быть плавным из-за частого сброса и набора скорости. Последний недостаток может быть особенно неблагоприятным для складских роботов, перевозящих грузы, часто незакрепленные, которые могут смещаться и даже падать с грузовой платформы при торможении и ускорении робота.
Известен способ планирования движения автономных мобильных роботов на основе безопасного пространства (SafeSpace), описанный в статье Park J.-H., Huh U.-Y. PathPlanningforAutonomousMobileRobotBasedonSafeSpace // JournalofElectricalEngineeringandTechnology. 2016. Vol. 11, No. 5, стр. 1441–1448. URL: https://doi.org/10.5370/JEET.2016.11.5.1441 (дата обращения 16.11.2020). Известный способ основан на определении пространства состояний робота, включающего в себя все кинематические состояния робота, в котором и осуществляют планирование. Для этой цели в пространстве состояний робота определяют безопасное пространство, задаваемое совокупностью состояний робота, в которых расстояние от робота до всех окружающих его препятствий является безопасным, т.е. включает в себя минимальное расстояние, необходимое для остановки робота до его столкновения с препятствием, с учетом ограниченной области видимости датчиков безопасности робота. Расстояние до остановки робота рассчитывается с учетом дистанции, проходимой роботом за время, требующееся ему для распознавания препятствия и начала торможения, а также величины тормозного пути, от начала торможения до полной остановки робота. Кроме того, способ учитывает риск наличия скрытых препятствий в областях вне зоны видимости датчиков безопасности робота, в частности, в областях, скрытых от датчиков безопасности стационарными препятствиями. Для этой цели вычисляется дистанция риска, соответствующая минимальному безопасному расстоянию от робота до точки риска, в которой возможно появление препятствия. Таким образом, вокруг стационарных препятствий задают области риска, накладывающие ограничения на планирование движения робота: требуется либо ограничить скорость движения робота, либо построить безопасную траекторию движения робота в обход области риска. Далее в известном способе осуществляют выбор глобально оптимальной траектории движения робота с помощью алгоритма А* с ограничением скорости движения робота по стоимости риска.
Введение безопасного пространства в описанном способе позволяет значительно увеличить плавность движения робота, по сравнению с классическим подходом, основанном исключительно на учете габаритов робота. Однако введение областей риска вокруг всех стационарных препятствий приводит к неоптимальным результатам планирования движения робота, особенно в условиях известной области допустимого движения, где появление и исчезновение препятствий является редким событием, таким образом, известный способ может приводить к избыточным ограничениям скорости движения робота. Вместе с тем описанный способ является наиболее близким решением к заявленному изобретению.
Техническая проблема, на решение которой направлено изобретение, заключается в планировании движения неголономного робота для некоторых начальной и конечной конфигураций робота в рамках заданной области допустимого движения на плоскости, с выбором глобально оптимальных траекторий, объездом статических препятствий, а также с учетом потенциально возможных ограничений скорости, вводимых датчиками безопасности.
РАСКРЫТИЕ СУЩНОСТИ ИЗОБРЕТЕНИЯ
Для решения поставленной проблемы предложен способ планирования движения робота в области допустимого движения на плоскости, содержащий этапы, на которых:
осуществляют дискретизацию пространства состояний робота посредством введения в области допустимого движения сетки с фиксированным шагом и выбора конечного множества углов поворота,
задают конечное множество элементарных траекторий в локальной системе координат робота, определяемых углом поворота ведущего колеса, его скоростью и длительностью движения, и соединяющих пары различных дискретных состояний робота в указанном пространстве,
для каждой элементарной траектории:
задают зону безопасности на основании зоны видимости датчиков безопасности робота при данных угле поворота и скорости движения ведущего колеса,
задают базовый контур посредством объединения зон безопасности с габаритами робота, и
задают контур элементарной траектории посредством объединения базовых контуров, помещенных в каждое промежуточное состояние элементарной траектории,
строят ориентированный взвешенный мультиграф без петель, вершины которого соответствуют дискретным состояниям робота, дуги соответствуют элементарным траекториям, а вес дуги соответствует времени движения робота по элементарной траектории, причем в граф включают лишь дуги, контуры элементарных траекторий которых полностью лежат в заданной области допустимого движения, и лишь те вершины, из которых исходит хотя бы одна дуга, и
определяют последовательность элементарных траекторий для движения робота в целевое состояние посредством поиска в построенном мультиграфе пути с наименьшей суммой весов.
Благодаря описанному подходу к введению и учету зон безопасности, заявленный способ обеспечивает более плавное и оптимальное по времени движение робота. В частности, при использовании изобретения достигаются следующие эффекты: робот сохраняет большую дистанцию от границы области допустимого движения, когда развивает большую скорость; при движении по узкому участку робот запланировано снижает скорость; повороты на «перекрестках», у границ зоны допустимого движения, робот осуществляет более плавно и на большой скорости.
Согласно варианту осуществления изобретения, заявленный способ дополнительно содержит этап, на котором базовый контур каждой элементарной траектории расширяют на величину погрешности движения робота по траектории. Это позволяет учесть погрешность движения робота вдоль выбранной траектории, если погрешность присутствует ине превышает некоторую пороговую величину. Например, таким образом можно учесть погрешность, вносимую проскальзыванием ведущего колеса робота, или погрешности, вносимые системой позиционирования.
Согласно следующему варианту осуществления изобретения, заявленный способ дополнительно содержит этапы, на которых:
осуществляют движение робота согласно выбранной последовательности элементарных траекторий и их скоростей,
в режиме реального времени осуществляют проверку окружающей робота области на наличие статических препятствий с помощью датчиков превентивного обнаружения препятствий,
проверяют контуры выбранной последовательности элементарных траекторий на наличие пересечения с обнаруженными статическими препятствиями, и
при наличии указанного пересечения определяют новую последовательность элементарных траекторий для движения робота в целевое состояние посредством поиска в построенном мультиграфе нового пути с наименьшей суммой весов, при этом из поиска исключают все дуги, контуры элементарных траекторий которых пересекаются с обнаруженными статическими препятствиями, а перебор кратных дуг осуществляют в порядке возрастания веса, до обнаружения дуги, контур элементарной траектории которой не пересекается с обнаруженными статическими препятствиями.
Изобретение в описанном выше варианте осуществления, позволяет перестроить траекторию движения робота в случае обнаружения препятствий датчиками превентивного обнаружения препятствий. Перестроение выполняется на основе того же, построенного ранее мультиграфа, что существенно снижает вычислительные затраты и увеличивает скорость перестроения.
Согласно дополнительному варианту осуществления изобретения, область видимости датчиков превентивного обнаружения препятствий робота превышает область видимости датчиков безопасности робота, так что определение новой последовательности элементарных траекторий для движения робота в целевое состояние из-за обнаружения статического препятствия датчиками превентивного обнаружения препятствий осуществляют без ограничения скорости движения робота.
Разность областей видимости датчиков превентивного обнаружения препятствий и датчиков безопасности может выбираться исходя из максимальной скорости робота, так чтобы во всех случаях перестроение траектории происходило до срабатывания датчиков безопасности и соответственно ограничения скорости робота. Таким образом, изобретение позволяет перестроить траекторию движения робота в режиме реального времени и без снижения скорости движения робота.
Решение поставленной проблемы также достигнуто с помощью мобильного робота, содержащего: шасси с ведущим колесом для обеспечения движения робота с заданным диапазоном скоростей, датчики безопасности для обнаружения препятствий в окружающей робота области видимости датчиков безопасности, и коммуникативно связанную с датчиками безопасности систему управления, выполненную с возможностью планирования движения робота в области допустимого движения на плоскости согласно описанному выше способу, и управления шасси для осуществления движения робота.
Согласно изобретению, обеспечивается более плавное и оптимальное по времени движение заявленного мобильного робота.
В дополнительном варианте осуществления мобильный робот содержит коммуникативно связанные с системой управления датчики превентивного обнаружения препятствий для обнаружения препятствий в окружающей робота области видимости датчиков превентивного обнаружения препятствий, превышающей область видимости датчиков безопасности робота. При этом система управления робота может быть выполнена с возможностью планирования движения робота в области допустимого движения на плоскости согласно вариантам осуществления заявленного способа, предусматривающим проверку окружающей робота области на наличие статических препятствий с помощью датчиков превентивного обнаружения препятствий. Соответственно, изобретение позволяет перестроить траекторию движения мобильного робота в режиме реального времени и без снижения скорости движения.
Наконец, изобретение предусматривает, что во всех вариантах осуществления мобильный робот может быть использован для решения разного рода задач, в частности, для решения задач складской логистики, и может представлять собой роботизированный штабелер, ричтрак, тягач, складскую тележку и т. п.
Каждый из описанных выше вариантов осуществления изобретения обеспечивает возможность достижения технического результата, заключающегося в оптимизации планирования движения неголономного робота для некоторых начальной и конечной конфигураций робота в рамках заданной области допустимого движения на плоскости, в том числе, посредством увеличения плавности движения и уменьшения времени движения робота по маршруту.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Сущность изобретения поясняется ниже на примере некоторых вариантов его осуществления со ссылкой на чертежи, содержащие следующие иллюстрации.
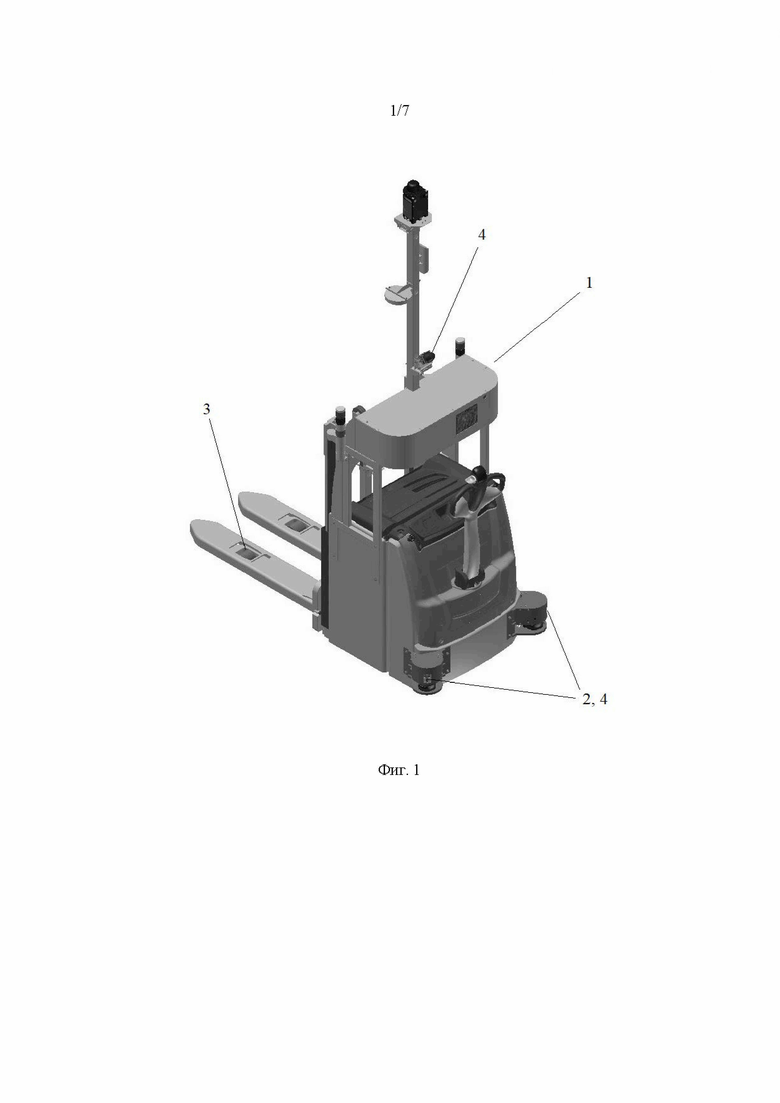
Фиг.1 – изображение роботизированного электрического штабелера, в котором может быть реализовано настоящее изобретение.
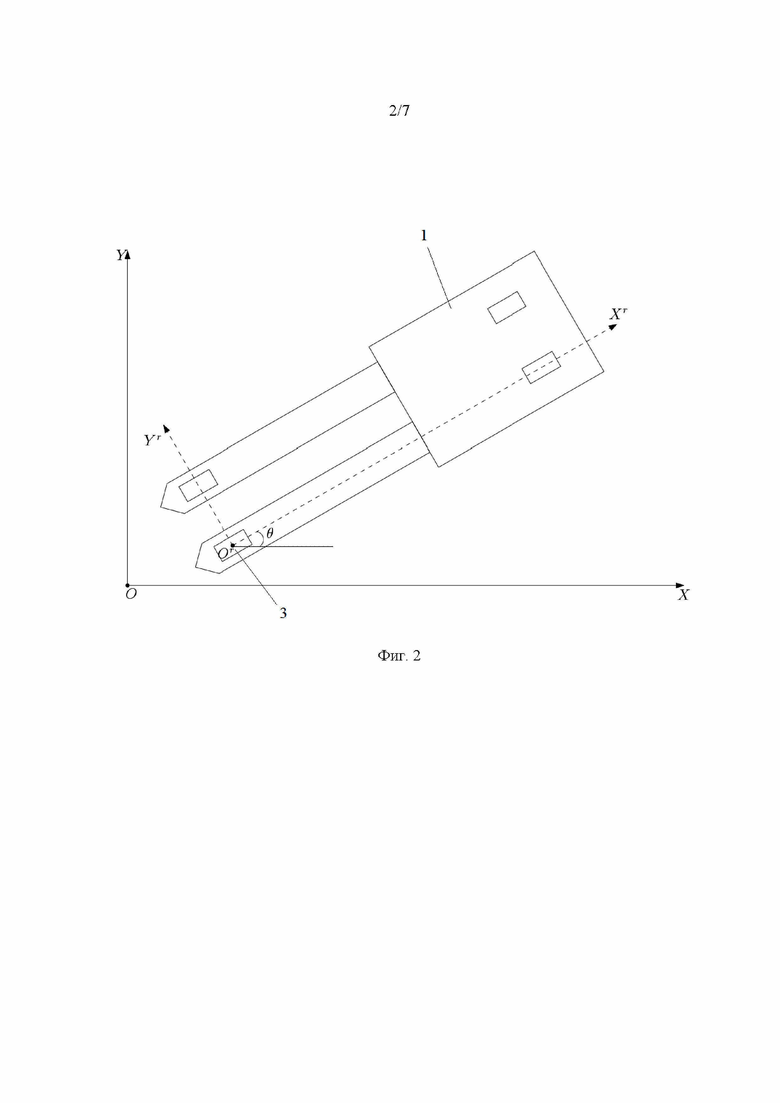
Фиг.2 – схематичное изображение робота-штабелера, в котором реализовано настоящее изобретение, глобальной и локальной систем координат.
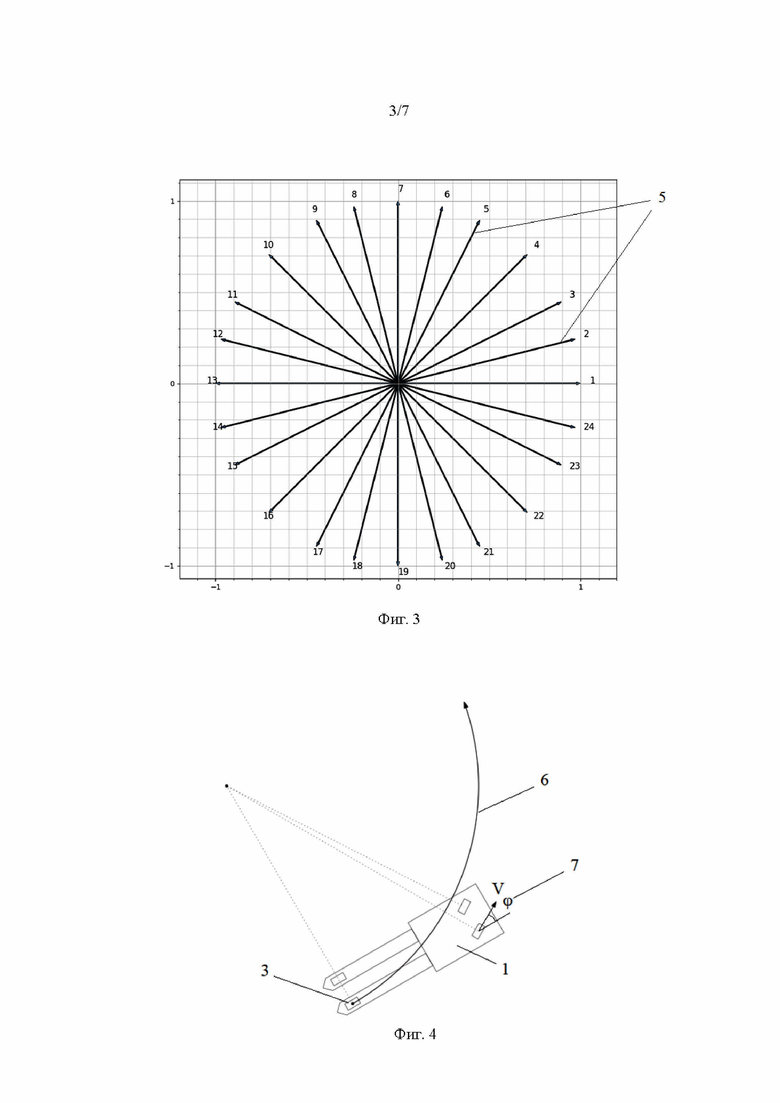
Фиг.3 – множество углов поворота робота-штабелера, заданное согласно изобретению.
Фиг.4 – пример элементарной траектории, проходимой точкой отсчета локальной системы координат при фиксированном угле поворота ведущего колеса робота-штабелера.
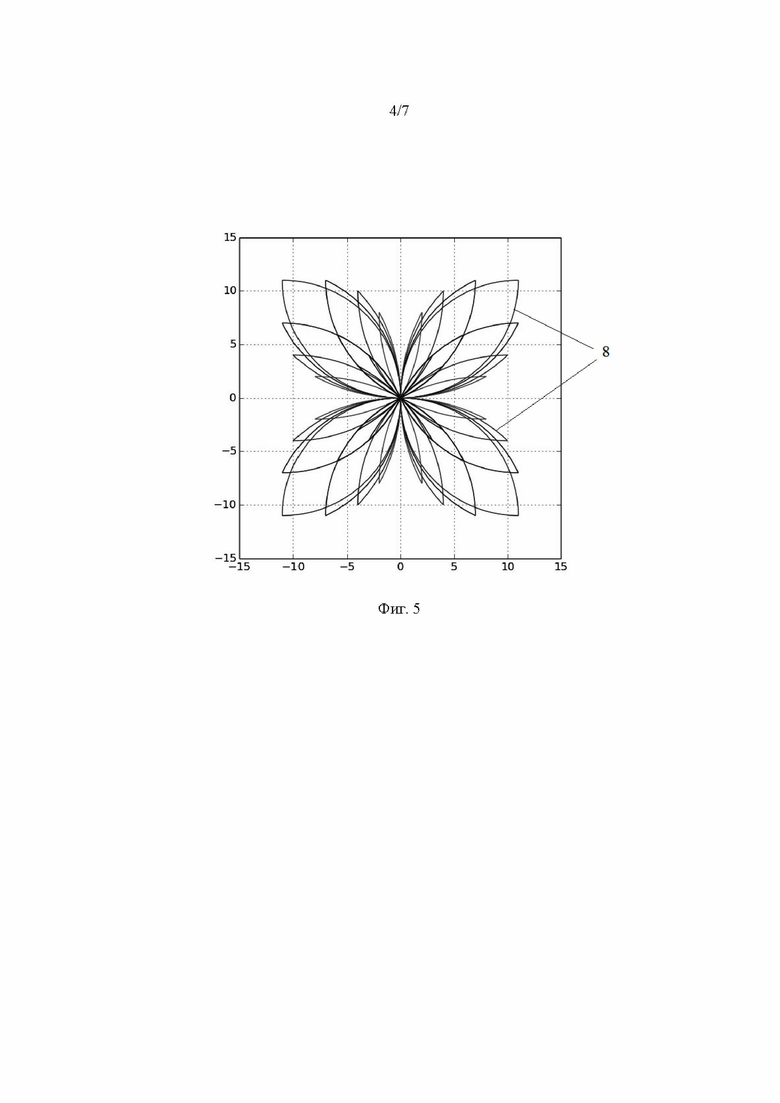
Фиг.5 – примерная выборка из множества элементарных траекторий робота-штабелера согласно изобретению.
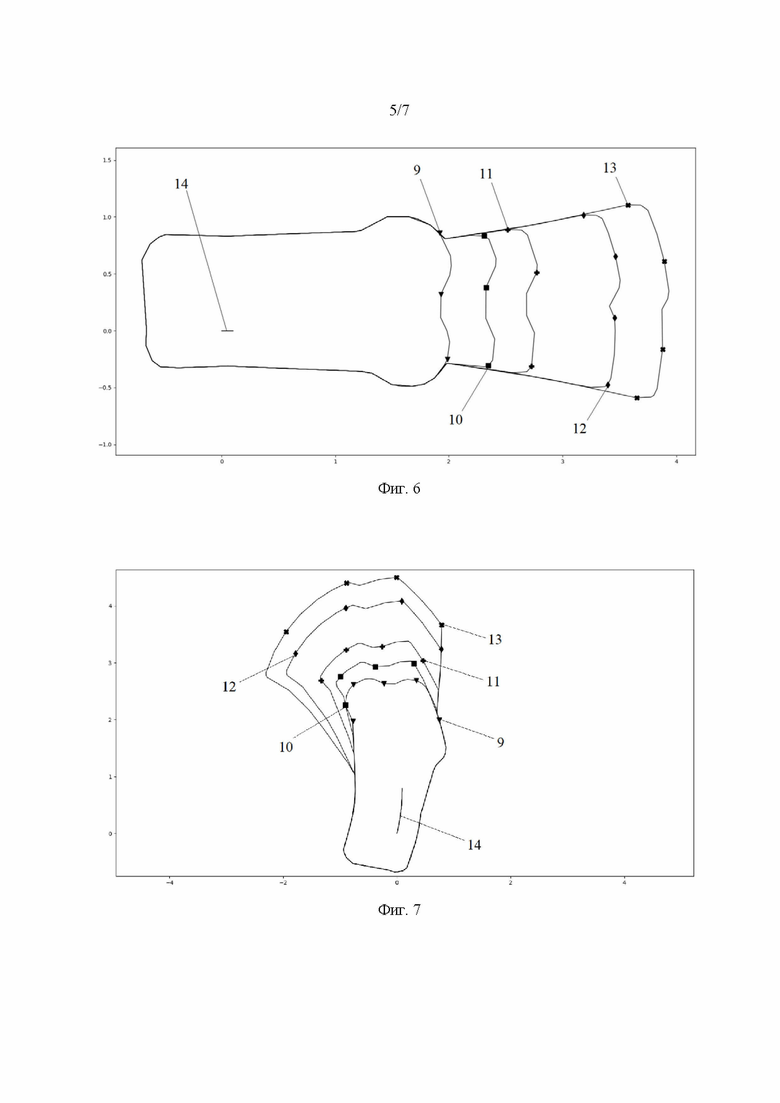
Фиг.6 – пример набора контуров элементарных траекторий, связывающих одни и те же начальное и конечное состояния,но соответствующих разным скоростям движения робота-штабелера.
Фиг.7 – другой пример набора контуров элементарных траекторий, связывающих одни и те же начальное и конечное состояния, но соответствующих разным скоростям движения робота-штабелера.
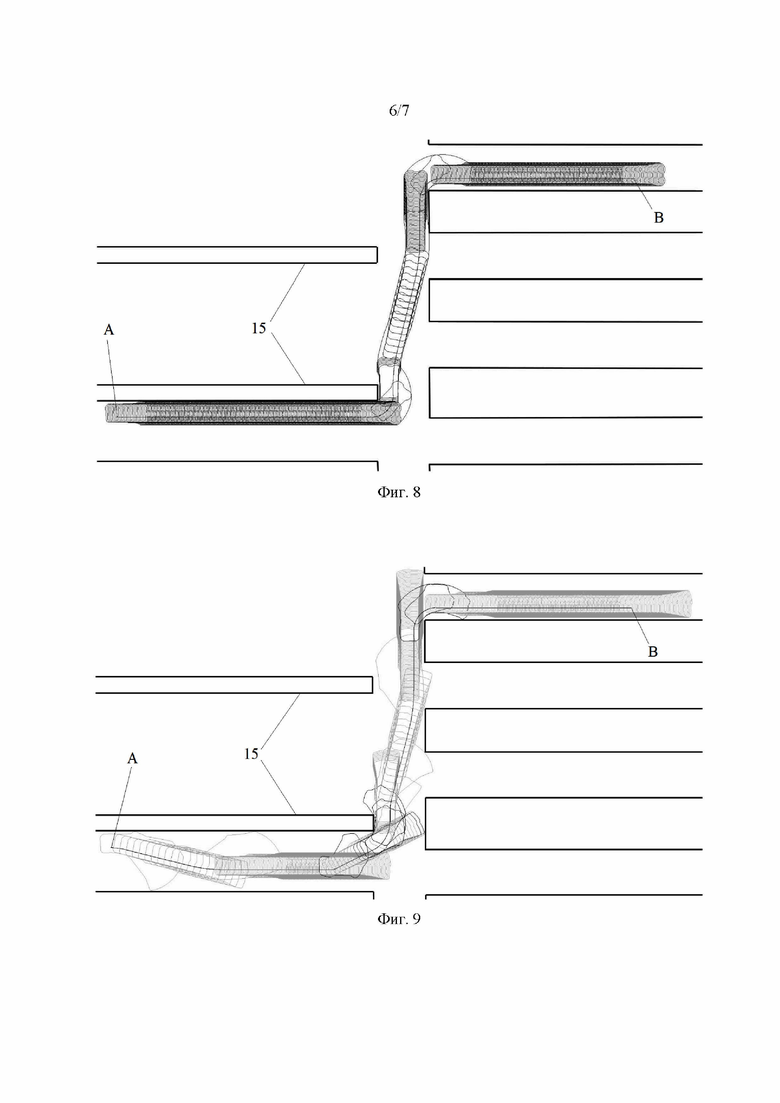
Фиг.8 – результат планирования движения робота-штабелера в области допустимого движения классическим способом, на основании габаритов робота, без учета контуров элементарных траекторий.
Фиг.9 – результат планирования движения робота-штабелера в области допустимого движения с фиг.8 согласно варианту осуществления изобретения.
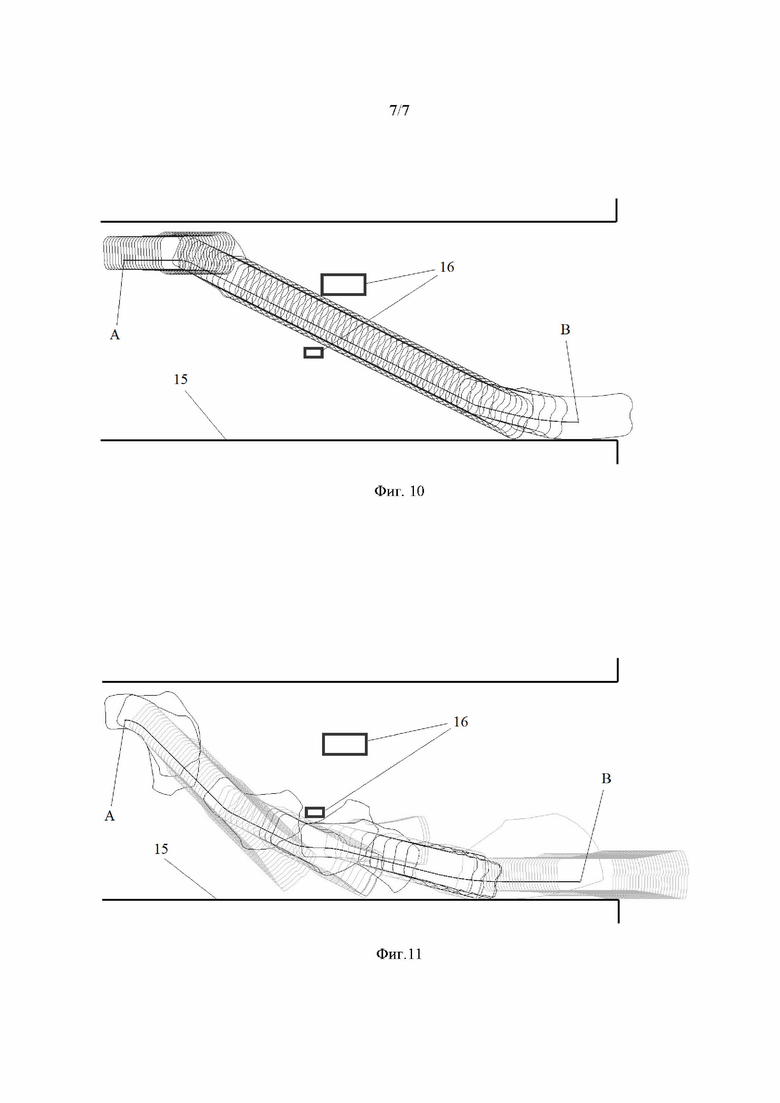
Фиг.10 – результат планирования движения робота-штабелера в области допустимого движения классическим способом, на основании габаритов робота, без учета контуров элементарных траекторий, в случае обнаружения статических препятствий.
Фиг.11 – результат планирования движения робота-штабелера в области допустимого движения с фиг.10 согласно варианту осуществления изобретения.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
Изобретение направлено на оптимизацию планирования движения робота, оснащенного датчиками безопасности и датчиками превентивного обнаружения препятствий, в области допустимого движения на плоскости. В рамках области допустимого движения появление и исчезновение статических препятствий считается редким событием. Концепция области допустимого движения применима, например, для складского помещения с известной геометрией, а также для многих других пространств, подлежащих измерению и контролю. Пространство вне области допустимого движения с большой вероятностью содержит статические препятствия, являющиеся постоянными для рассматриваемого окружения.
Для ясности предполагается, что робот имеет одно ведущее колесо, проскальзыванием которого можно пренебречь. Примером подобного робота является роботизированный электрический штабелер 1, изображенный на Фиг.1, в котором было реализовано настоящее изобретение. Здесь и далее термины «робот», «мобильный робот», «робот-штабелер», «штабелер» применяются взаимозаменяемо и обозначают робота, в котором реализовано настоящее изобретение, если иное не указано прямо. Вместе с тем необходимо понимать, что изобретение не ограничено в этом отношении и с успехом может быть реализовано на базе любого мобильного робота, кинематическая модель которого сводима к кинематической модели робота с одним ведущим колесом , в частности, в различных роботизированных складских транспортных средствах, таких как тягач, складская тележка, ричтрак и т.п. .
Датчики безопасности 2 робота в режиме реального времени проверяют наличие препятствий в некоторой области видимости, определяемой углом поворота и скоростью ведущего колеса 3, называемой зоной безопасности. При обнаружении препятствия в зоне безопасности датчик безопасности соответствующим образом ограничивает скорость движения робота. Датчики превентивного обнаружения препятствий 4 робота также работают в режиме реального времени и имеют области видимости, превосходящие области видимости датчиков безопасности. При этом, как показано на Фиг.1, сенсорная часть системы датчиков превентивного обнаружения препятствий 4 может быть по меньшей мере частично объединена с сенсорной частью системы датчиков безопасности 2, при условии наличия у каждой из систем датчиков безопасности и превентивного обнаружения препятствий собственных подсистем обработки данных и исполнительных механизмов.
На рассматриваемой плоскости вводятся две Декартовы правосторонние системы координат: фиксированная, глобальная система координат и связанная с ведущим колесом 3робота, локальная система координат, как показано на Фиг.2 на примере робота-штабелера 1. Таким образом, положение робота на плоскости, далее называемое состоянием робота, может быть представлено тремя величинами: смещением и поворотом точки отсчета локальной системы координат относительно глобальной. Совокупность всех возможных состояний робота в области допустимого движения образует пространство состояний робота.
Как было упомянуто выше, робот имеет одно ведущее колесо или может быть представлен кинематической моделью с одним ведущим колесом, известен диапазон возможных углов его поворота, а также диапазон возможных скоростей. Предполагается, что проскальзыванием ведущего колеса робота можно пренебречь, принимается кинематическая модель движения. Указанные допущения уместны и обоснованы для большого диапазона задач, в частности, для планирования движения роботов в закрытых помещениях, таких как складские помещения. Более того, практика показывает, что перечисленные допущения могут приниматься и для планирования движения мобильных роботов на открытых пространствах. В этих случаях погрешностями из-за возможного проскальзывания ведущего колеса роботы можно пренебречь, или же компенсировать их с помощью системы управления робота, отслеживающей его местоположение и скорость. В начале способа планирования движения робота настоящего изобретения осуществляется дискретизация пространства состояний робота: в области допустимого движения вводится сетка с фиксированным шагом, а также выбирается конечное множество углов поворота робота. Пример множества углов поворота 5, выбранного для робота-штабелера 1, проиллюстрирован на Фиг.3.
Таким образом, дискретное состояние робота представляется индексами ближайшей вершины сетки в области допустимого движения и индексом ближайшего угла поворота. Соответствующие траектории, проходимые точкой отсчета локальной системы координат робота, состоят из отрезков прямых, дуг окружностей и точек поворота на месте. Каждый отдельный участок такой траектории, называемый далее элементарной траекторией, определяется тремя параметрами: углом поворота ведущего колеса, его скоростью, а также длительностью движения. Пример элементарной траектории 6, представляющей собой путь, проходимый точкой отсчета локальной системы координат за некоторый период времени при фиксированном угле поворота 7 и скорости движения V ведущего колеса 3 робота-штабелера 1 изображен на Фиг.4.
С учетом этого, в способе согласно изобретению, задают конечное множество элементарных траекторий с достаточной точностью соединяющих пары различных дискретных состояний робота в пространстве состояний робота. На Фиг.5 можно видеть пример выборки из множества элементарных траекторий 8 робота-штабелера 1.
Угол поворота колеса робота и его скорость полностью определяют область видимости датчиков безопасности при движении робота по элементарной траектории. С учетом этого, в способе согласно изобретению, для каждой элементарной траектории задают зону безопасности на основании области видимости датчиков безопасности робота при данных угле поворота и скорости движения ведущего колеса. Далее для каждой элементарной траектории задают базовый контур, представляющий собой объединение зон безопасности с габаритами робота. Наконец, для каждой элементарной траектории задают контур элементарной траектории, представляющий собой объединение базовых контуров, помещенных в каждое промежуточное состояние элементарной траектории. Несколько примеров контуров элементарных траекторий робота-штабелера 1 представлено на Фиг.6 и 7. На каждом из чертежей на Фиг.6 и 7 проиллюстрированы контуры 9, 10, 11, 12 и 13элементарных траекторий, связывающих одни и те же начальное и конечное состояния,но соответствующих разным скоростямдвижения робота-штабелера 1; а также показан путь 14, которыйв этих случаяхпроходитточка отсчета локальной системы координат робота. На каждой из фигур, контур 9, отмеченный знаками треугольника, соответствует скорости движения робота-штабелера в 0.3 м/с; контур 10, отмеченный знаками квадрата, соответствует скорости в 0.7 м/с; контур 11, отмеченный знаками прямого креста, соответствует скорости в 1.0 м/с; контур 12, отмеченный знаками ромба, соответствует скорости в 1.38 м/с; и контур 13, отмеченный знаками наклоненного креста, соответствует скорости в 1.67 м/с.
Поскольку робот может двигаться вдоль данной траектории с некоторой погрешностью, в дополнительном варианте осуществления изобретения базовый контур каждой элементарной траектории расширяют на величину такой погрешности. В данном варианте осуществления изобретение может использоваться в том числе для планирования движения робота на открытых пространствах, где возможно проскальзывание ведущего колеса робота.
Заданная область допустимого движения робота в глобальной системе координат может быть представлена, например, набором плоских многоугольников. Данная область является фиксированной, и для учета возможности кратковременного появления в ней препятствий используются данные с датчиков превентивного обнаружения препятствий.
Согласно заявленному способу, однократно строится ориентированный взвешенный мультиграф без петель, далее для краткости называемый просто мультиграф, вершины которого соответствуют дискретным состояниям робота, а дуги соответствуют элементарным траекториям. В мультиграф включаются лишь такие дуги, контуры элементарных траекторий которых полностью лежат в области допустимого движения, а также лишь те вершины, из которых исходит хотя бы одна дуга. В качестве весов дуг используют время движения по элементарным траекториям. Таким образом, путь в мультиграфе с наименьшей суммой весов на дугах позволит достичь целевого состояния за наименьшее время. В соответствии с этим, способ планирования движения робота настоящего изобретения содержит определение последовательности элементарных траекторий для движения робота в целевое состояние посредством поиска в построенном мультиграфе пути с наименьшей суммой весов.
Поиск пути в мультиграфе может быть осуществлен при помощи различных известных алгоритмов, таких как A*, D*, RTAA*, LSS-LRTA* и др. Изобретение не ограничено в отношении алгоритма для поиска пути в мультиграфе, и любой соответствующий алгоритм, в том числе алгоритмы, которые могут быть разработаны в будущем, может с успехом применяться во всех вариантах осуществления настоящего изобретения.
Кратные дуги в мультиграфе соответствуют элементарным траекториям с одинаковым углом поворота ведущего колеса и одинаковой длиной, но различной скоростью и различным временем движения, т.е. различным весом. Очевидно, что дуга с наибольшей скоростью (наименьшим весом) будет наиболее предпочтительной среди всех кратных дуг, однако, поскольку ей также соответствует и наибольший контур, она может быть исключена из рассмотрения в процессе перестроения пути в ходе движения робота, в случае обнаружения пересекающегося с таким контуром препятствия.
Для этого в варианте осуществления изобретения, способ дополнительно содержит этапы, на которых: осуществляют движение робота согласно выбранной последовательности элементарных траекторий и их скоростей и в режиме реального времени осуществляют проверку окружающей робота области на наличие статических препятствий с помощью датчиков превентивного обнаружения препятствий. Контуры выбранной последовательности элементарных траекторий проверяют на наличие пересечения с обнаруженными статическими препятствиями, и при наличии указанного пересечения определяют новую последовательность элементарных траекторий для движения робота в целевое состояние посредством поиска в построенном мультиграфе нового пути с наименьшей суммой весов, при этом из поиска исключают все дуги, контуры элементарных траекторий которых пересекаются с обнаруженными статическими препятствиями, а перебор кратных дуг осуществляют в порядке возрастания веса, до обнаружения дуги, контур элементарной траектории которой не пересекается с обнаруженными статическими препятствиями. Последнее правило перебора кратных дуг повышает эффективность заявленного способа, поскольку увеличивает скорость поиска нового пути в мультиграфе, не ухудшая результатов поиска.
При этом, согласно предпочтительному варианту осуществления изобретения, область видимости датчиков превентивного обнаружения препятствий робота, превышающую область видимости датчиков безопасности робота, на основе показаний которых скорость робота может быть ограничена, подбирают таким образом, что определение новой последовательности элементарных траекторий для движения робота в целевое состояние из-за обнаружения статического препятствия датчиками превентивного обнаружения препятствий осуществляется без ограничения скорости движения робота. Другими словами, разницу в области видимости датчиков превентивного обнаружения препятствий и датчиков безопасности робота подбирают так, чтобы после срабатывания датчиков превентивного обнаружения препятствий робот успевал перестроить и изменить траекторию движения до срабатывания датчиков безопасности, даже в случае движения с максимальной скоростью.
Как было упомянуто выше, изобретение было реализовано в программно-аппаратном комплексе роботизированного электрического штабелера 1, изображенного на Фиг.1. Указанный штабелер 1 является мобильным роботом, представляющим собой отдельный объект настоящего изобретения. Реализация изобретения на базе робота-штабелера 1 описана ниже в подробностях для обеспечения понимания сущности изобретения. Вместе с тем, необходимо понимать, что все представленные технические подробности, значения и величины являются лишь примерами одного или нескольких вариантов осуществления изобретения, и никоим образом не ограничивают объем правовой защиты, определяемый формулой изобретения.
Как показано на Фиг.1, робот-штабелер 1 оснащен двумя лазерными сканерами, расположенными в его передней части по бокам и сочетающими в себе функции сенсорной части датчиков безопасности 2 и датчиков превентивного обнаружения препятствий 4. Объединение сенсорной части датчиков безопасности и превентивного обнаружения препятствий предпочтительна для повышения компактности и снижения стоимость оборудования робота, однако не является единственно возможным решением. С равным успехом датчики безопасности и датчики превентивного обнаружения препятствий могут быть реализованы в виде отдельных устройств или модулей.
Робот-штабелер 1 имеет одно ведущее колесо 3, угол его поворота φ лежит в диапазоне [-90, 90] град, а линейная скорость V — в диапазоне [-0.3, 1.67] м/с, например, как показано на Фиг.4. Колесная база L составляет 1.386 м. Исходя из параметров задачи на этапе дискретизации пространства состояний на плоскости была введена сетка с шагом 0.1 м по осям OX и OY глобальной системы координат, показанной на Фиг.2, а также зафиксировано множество 5 из 24 углов поворота ведущего колеса 3 робота, изображенное на Фиг.3. Далее было зафиксировано множество из 918 элементарных траекторий, выборка 8 из которых для примера показана на Фиг.5. Изобретение не ограничено в отношении всех указанных параметров, шаг сетки, количество дискретных углов поворота и элементарных траекторий робота могут быть заданы по другому, в зависимости от условий решаемой задачи, требуемой точности, доступных вычислительных мощностей и т.п.
Исходя из указанных выше параметров, был применен способ планирования движения штабелера 1 согласно изобретению. На Фиг.6 и 7 показаны примеры контуров элементарных траекторий, вычисленных для робота-штабелера 1: в каждом случае показан набор контуров элементарной траектории 9, 10, 11, 12 и 13, связывающих одни и те же начальное и конечное состояния, но соответствующих разным скоростям движения робота, от 0.3 м/с до 1.67 м/с, как было указано выше.
На основании данных параметров было осуществлено планирование движения штабелера 1 в различных областях допустимого движения способом согласно вариантам осуществления изобретения, а также классическим способом, без учета зон безопасности и контуров элементарных траекторий, описанных выше, что позволяет сравнить результаты планирования.
На Фиг.8 показан пример планирования движения робота-штабелера 1 из точки A в точку B в заданной области допустимого движения с границами 15 классическим способом, на основании габаритов робота-штабелера 1. На Фиг.9 представлен результат применения варианта осуществления настоящего изобретения для планирования движения робота-штабелера 1 в условиях, аналогичных показанным на Фиг.8. Еще один пример планирования движения робота-штабелера 1 классическим способом представлен на Фиг.10, в этом случае происходит обнаружение статических препятствий 16во время движения робота в области допустимого движения. На Фиг.11 представлен результат применения варианта осуществления настоящего изобретения для планирования движения робота-штабелера 1 в условиях, аналогичных показанным на Фиг.10.
Сравнение траекторий движения робота на Фиг.8 и 9, 10 и 11 наглядно показывает, что благодаря оптимизации планирования движения робота в вариантах осуществления настоящего изобретения достигаются следующие полезные эффекты: робот сохраняет большую дистанцию от границы области допустимого движения, когда развивает большую скорость; при движении по узкому участку робот запланировано снижает скорость; повороты на «перекрестках», у границ зоны допустимого движения, робот осуществляет более плавно и на большой скорости.
Описанные выше варианты осуществления являются лишь примерными, конкретные параметры, значения и величины, используемые в них, также следует трактовать в качестве неограничивающих примеров. После прочтения настоящего описания специалисты в данной области техники могут предложить различные изменения и корректировки описанных вариантов осуществления, не изменяющих сущности заявленного изобретения. Все такие изменения и корректировки попадают в объем правовой защиты, определяемой формулой изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПОСТРОЕНИЯ МАРШРУТА ДВИЖЕНИЯ И УПРАВЛЕНИЯ ДВИЖЕНИЕМ МОБИЛЬНОГО СЕРВИСНОГО РОБОТА В ТОРГОВОМ ПОМЕЩЕНИИ | 2021 |
|
RU2769710C1 |
| Способ траекторного управления движением мобильного сервисного робота | 2024 |
|
RU2825211C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ АДАПТИВНЫМ МОБИЛЬНЫМ РОБОТОМ | 2000 |
|
RU2187832C2 |
| МОБИЛЬНЫЙ РОБОТ И СПОСОБ УПРАВЛЕНИЯ МОБИЛЬНЫМ РОБОТОМ | 2021 |
|
RU2800529C1 |
| РОБОТ-ПЫЛЕСОС С ФУНКЦИЕЙ WI-FI | 2023 |
|
RU2831101C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО ФОРМИРОВАНИЯ ГЛАДКИХ ТРАЕКТОРИЙ ДВИЖЕНИЯ МОБИЛЬНОГО РОБОТА В НЕИЗВЕСТНОМ ОКРУЖЕНИИ | 2016 |
|
RU2661964C2 |
| УСТРОЙСТВО ПОЗИЦИОННО-ТРАЕКТОРНОГО УПРАВЛЕНИЯ МОБИЛЬНЫМ РОБОТОМ | 2001 |
|
RU2185279C1 |
| МОБИЛЬНЫЙ РОБОТ | 2012 |
|
RU2487007C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ НАЗЕМНЫМ РОБОТОТЕХНИЧЕСКИМ КОМПЛЕКСОМ | 2014 |
|
RU2574938C2 |
| ПЛАНИРОВАНИЕ ТРАЕКТОРИИ | 2018 |
|
RU2751382C1 |
Группа изобретений относится к робототехнике. Мобильный робот содержит шасси с ведущим колесом, датчики безопасности и систему управления. Способ планирования движения робота содержит дискретизацию пространства состояний робота и задание конечного множества элементарных траекторий в локальной системе координат робота. Для каждой элементарной траектории задают зону безопасности на основании зоны видимости датчиков безопасности при данных угле поворота и скорости движения, базовый контур и контур элементарной траектории, объединяя базовые контуры, помещенные в каждое промежуточное состояние элементарной траектории. Далее строят ориентированный взвешенный мультиграф без петель, вершины которого соответствуют дискретным состояниям робота, дуги соответствуют элементарным траекториям, а вес дуги соответствует времени движения робота по элементарной траектории, и определяют последовательность элементарных траекторий для движения робота в целевое состояние посредством поиска в мультиграфе пути с наименьшей суммой весов. Достигается оптимизация планирования движения неголономного робота в рамках заданной области допустимого движения, увеличение плавности движения и уменьшение времени движения робота по маршруту. 2 н. и 6 з.п. ф-лы, 11 ил.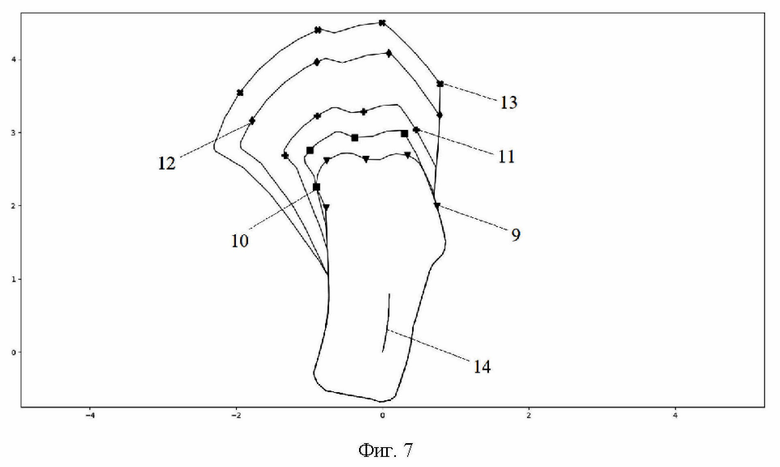
1. Способ планирования движения робота в области допустимого движения на плоскости, содержащий этапы, на которых:
осуществляют дискретизацию пространства состояний робота посредством введения в области допустимого движения сетки с фиксированным шагом и выбора конечного множества углов поворота,
задают конечное множество элементарных траекторий в локальной системе координат робота, определяемых углом поворота ведущего колеса, его скоростью и длительностью движения, и соединяющих пары различных дискретных состояний робота в указанном пространстве,
для каждой элементарной траектории:
задают зону безопасности на основании области видимости датчиков безопасности робота при данных угле поворота и скорости движения ведущего колеса,
задают базовый контур посредством объединения зон безопасности с габаритами робота, и
задают контур элементарной траектории посредством объединения базовых контуров, помещенных в каждое промежуточное состояние элементарной траектории,
строят ориентированный взвешенный мультиграф без петель, вершины которого соответствуют дискретным состояниям робота, дуги соответствуют элементарным траекториям, а вес дуги соответствует времени движения робота по элементарной траектории, причем в граф включают лишь дуги, контуры элементарных траекторий которых полностью лежат в заданной области допустимого движения, и лишь те вершины, из которых исходит хотя бы одна дуга, и
определяют последовательность элементарных траекторий для движения робота в целевое состояние посредством поиска в построенном мультиграфе пути с наименьшей суммой весов.
2. Способ по п.1, дополнительно содержащий этап, на котором:
базовый контур каждой элементарной траектории расширяют на величину погрешности движения робота по траектории.
3. Способ по п.1 или 2, дополнительно содержащий этапы, на которых:
осуществляют движение робота согласно выбранной последовательности элементарных траекторий и их скоростей,
в режиме реального времени осуществляют проверку окружающей робота области на наличие статических препятствий с помощью датчиков превентивного обнаружения препятствий,
проверяют контуры выбранной последовательности элементарных траекторий на наличие пересечения с обнаруженными статическими препятствиями, и
при наличии указанного пересечения определяют новую последовательность элементарных траекторий для движения робота в целевое состояние посредством поиска в построенном мультиграфе нового пути с наименьшей суммой весов, при этом из поиска исключают все дуги, контуры элементарных траекторий которых пересекаются с обнаруженными статическими препятствиями, а перебор кратных дуг осуществляют в порядке возрастания веса, до обнаружения дуги, контур элементарной траектории которой не пересекается с обнаруженными статическими препятствиями.
4. Способ по п.3, в котором область видимости датчиков превентивного обнаружения препятствий робота превышает область видимости датчиков безопасности робота, так что определение новой последовательности элементарных траекторий для движения робота в целевое состояние из-за обнаружения статического препятствия датчиками превентивного обнаружения препятствий осуществляют без ограничения скорости движения робота.
5. Мобильный робот, содержащий:
шасси с ведущим колесом для обеспечения движения робота с заданным диапазоном скоростей,
датчики безопасности для обнаружения препятствий в окружающей робота области видимости датчиков безопасности, и
коммуникативно связанную с датчиками безопасности систему управления, выполненную с возможностью планирования движения робота в области допустимого движения на плоскости согласно способу по п.1 или 2 и управления шасси для осуществления движения робота.
6. Мобильный робот по п.5, дополнительно содержащий коммуникативно связанные с системой управления датчики превентивного обнаружения препятствий для обнаружения препятствий в окружающей робота области видимости датчиков превентивного обнаружения препятствий, превышающей область видимости датчиков безопасности робота.
7. Мобильный робот по п.6, в котором система управления выполнена с возможностью планирования движения робота в области допустимого движения на плоскости согласно способу по п.3 или 4.
8. Мобильный робот по любому из пп.5-7, представляющий собой роботизированное складское транспортное средство, в частности одно из штабелера, тягача, складской тележки и ричтрака.
| АВТОНОМНЫЙ МОБИЛЬНЫЙ РОБОТ И СПОСОБ ЕГО РАБОТЫ | 2013 |
|
RU2634857C2 |
| CN 104932493 A, 23.09.2015 | |||
| ВСЕНАПРАВЛЕННЫЙ КОЛЕСНЫЙ ЧЕЛОВЕКОПОДОБНЫЙ РОБОТ, ОСНОВАННЫЙ НА КОНТРОЛЛЕРЕ ПОЛОЖЕНИЯ И СКОРОСТИ С ЛИНЕЙНЫМ ПРОГНОЗИРОВАНИЕМ | 2015 |
|
RU2680628C2 |
| KR 20100027683 A, 11.03.2010 | |||
| JP 2011175393 A, 08.09.2011. | |||

