Изобретение относится к робототехнике и может быть использовано в роботах, предназначенных для ликвидации чрезвычайных ситуаций, например для обнаружения и уничтожения взрывоопасных устройств.
Известен мобильный робот, содержащий транспортное средство, устройство для обнаружения препятствия, систему управления, соединенную с транспортным средством, и манипулятор («Мобильные роботизированные взрывотехнические комплексы», журнал «Специальная техника» №1).
Недостатком известного устройства является недостаточная точность обнаружения препятствий и перемещений робота.
Технической задачей заявляемого изобретения является повышение точности обнаружения препятствий, перемещений робота, измерений пройденного пути.
Указанная задача достигается за счет того, что мобильный робот содержит платформу, установленную на транспортном средстве, устройство для обнаружения препятствия, систему управления, соединенную с блоком управления движением транспортного средства и устройством для обнаружения препятствия и управляющую ими, манипулятор, шарнирно установленный на платформе и выполненный в виде снабженных приводами и шарнирно соединенных между собой звеньев, на конечном из которых размещено устройство для обнаружения препятствия, имеющее подвижный щуп с наконечником и позиционно-чувствительный датчик, состоящий из оптически связанных источника излучения, объектива и фотоприемника, при этом устройство для обнаружения препятствия включает электронный блок обработки, выполненный в виде первого, второго, третьего и четвертого усилителей, последовательно соединенных первого сумматора, блока сравнения и пятого усилителя, последовательно соединенных первого и второго блоков вычитания, последовательно соединенных третьего блока вычитания и второго сумматора, источника опорного напряжения, причем выход первого усилителя связан с первым входом третьего блока вычитания, со вторым входом которого связан выход третьего усилителя, выход второго усилителя связан с первым входом первого блока вычитания, со вторым входом которого связан выход четвертого усилителя, четыре входа первого сумматора подключены соответственно к выходам первого, второго, третьего и четвертого усилителей, выходы первого и третьего блоков вычитания связаны со вторыми входами второго сумматора и второго блока вычитания соответственно, второй вход блока сравнения связан с выходом источника опорного напряжения, выход пятого усилителя подключен к источнику излучения, фотоприемник выполнен в виде четырехквадрантного фотодиода, центр которого размещен на одной прямой с оптической осью объектива и осью подвижного щупа, последний выполнен полым, и источник излучения установлен в его полости со стороны наконечника, а четыре выхода фотоприемника связаны соответственно с первым, вторым, третьим и четвертым усилителями, при этом блок управления движением транспортного средства подключен к блоку питания, связанному с последовательно соединенными микроконтроллером, шестым усилителем и электроприводом, входы микроконтроллера соединены с выходами датчиков текущего положения, скорости, углового и линейного перемещений, выполненных в виде энкодеров, зубчатки которых установлены на каждом колесе транспортного средства.
Информация о наличии препятствия и о пройденном пути поступает в систему управления, управляющую движением транспортного средства и устройством для обнаружения препятствия и обеспечивающую необходимые обороты каждого колеса и соответствующие движения робота, т.е. обеспечивает управляемые повороты без проскальзывания платформы робота при выполнении поворотов и разворотов, при этом появляется возможность производить управляемые, с четко контролируемыми параметрами, подъезды и отъезды от препятствия и т.д.
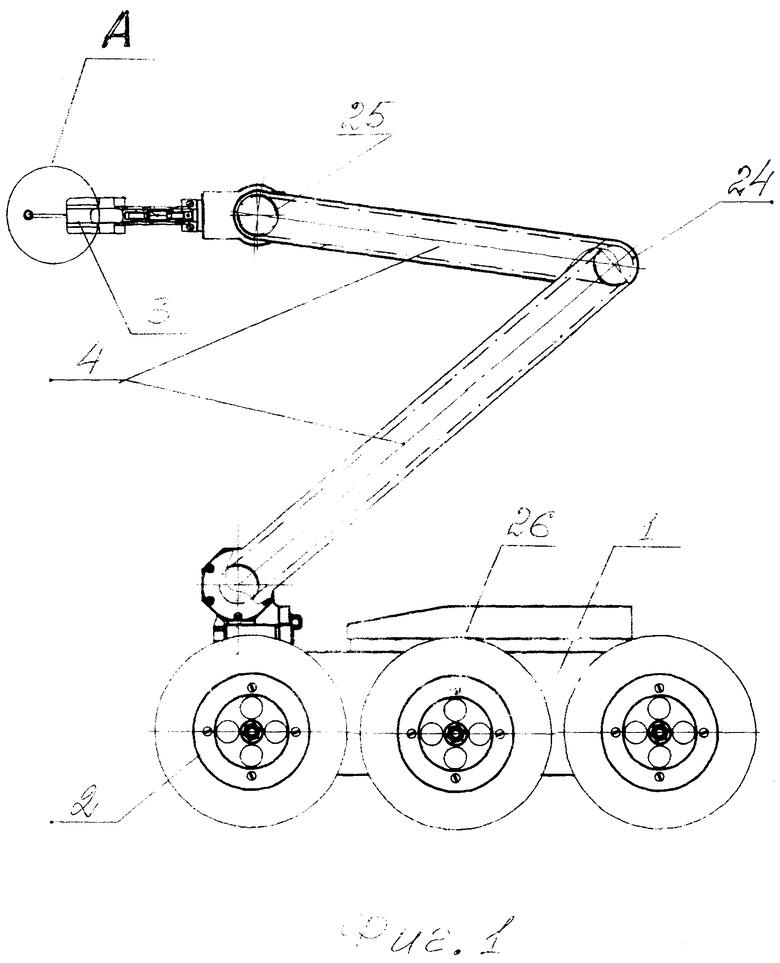
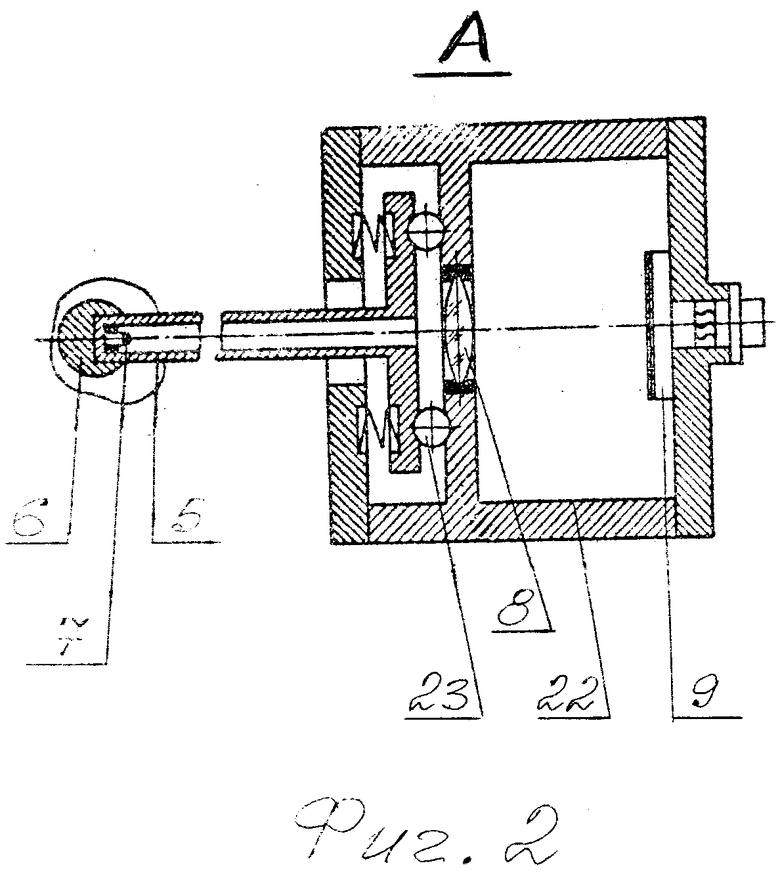
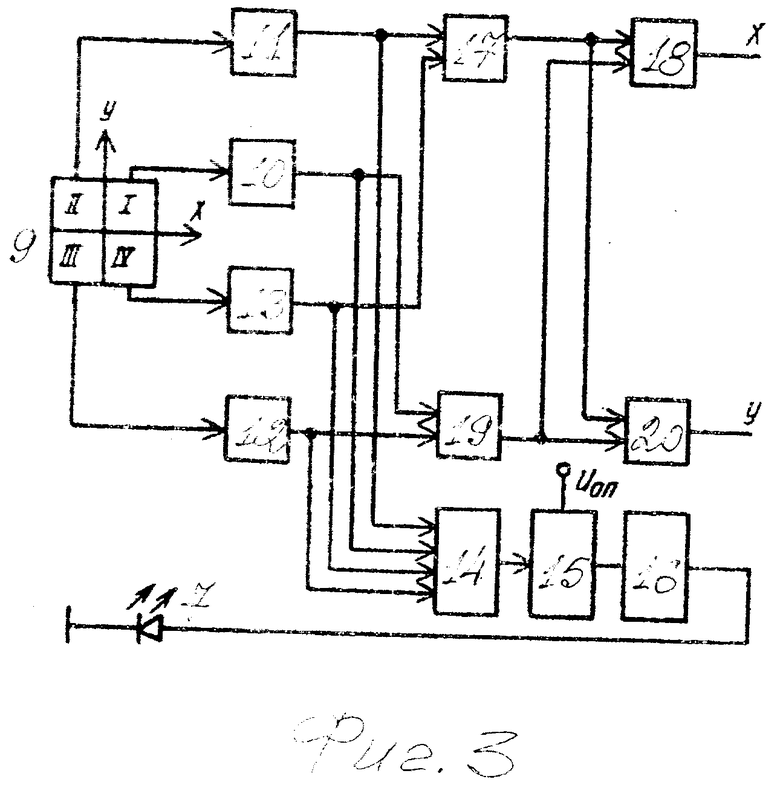
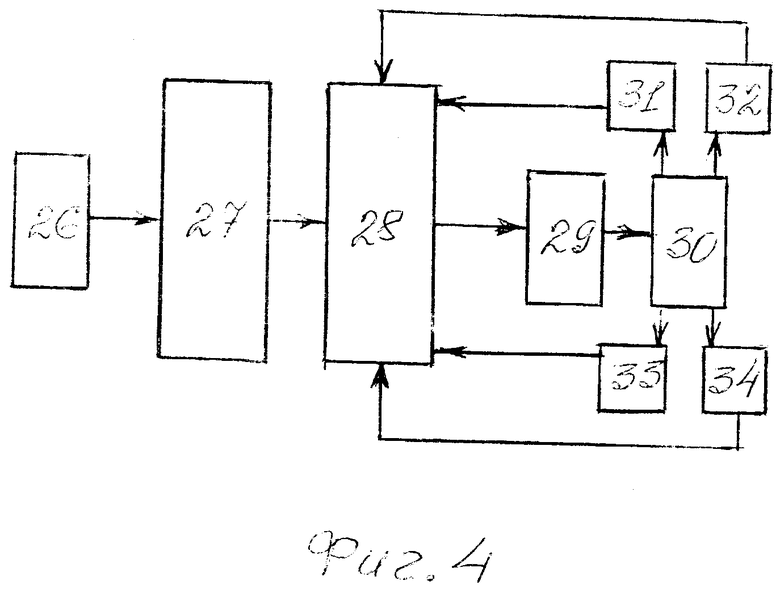
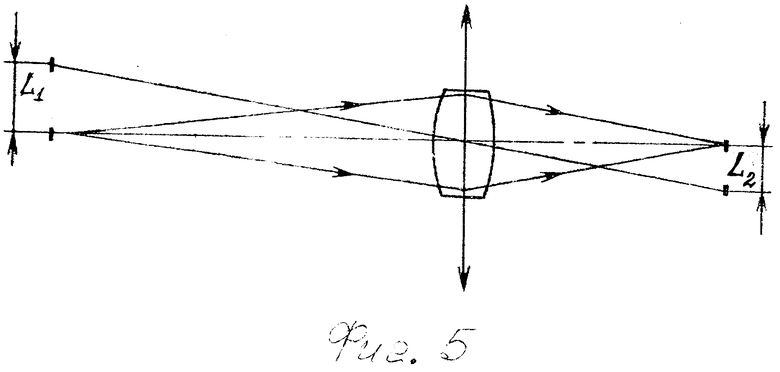
Изобретение поясняется чертежами, где на фиг.1 изображен общий вид мобильного робота; на фиг.2 - узел А на фиг.1; на фиг.3 - блок-схема устройства для обнаружения препятствия; на фиг.4 - блок-схема управления движением транспортного средства; на фиг.5 - схема световых сигналов.
Мобильный робот содержит платформу 1, установленную на транспортном средстве 2, устройство 3 для обнаружения препятствия, систему управления (не показана), соединенную с транспортным средством 2 и устройством 3 для обнаружения препятствия и управляющую ими, манипулятор, шарнирно установленный на платформе 1 и выполненный в виде снабженных приводами и шарнирно соединенных между собой звеньев 4, на конечном из которых и размещено устройство 3 для обнаружения препятствия, имеющее подвижный щуп 5 с наконечником 6 и позиционно-чувствительный датчик, связанный с системой управления и включающий источник 7 излучения, объектив 8 и фотоприемник 9, электронный блок обработки. Щуп 5 выполнен полым и связан с корпусом 22 датчика системой 23 подвеса. Источник 7 излучения выполнен в виде светодиода и расположен в полости щупа 5 со стороны наконечника 6, объектив 8 закреплен в корпусе 22, и его оптическая ось совпадает с осью щупа 5 при его номинальном положении. Фотоприемник 9 выполнен в виде четырехквадрантного фотодиода, имеющего четыре выхода I-IV, и расположен в плоскости, оптически сопряженной с источником 7 излучения. Центр четырехквадрантного фотодиода совмещен с оптической осью объектива 8 и осью подвижного щупа 5. Электронный блок обработки включает первый, второй, третий и четвертый усилители 10-13, входы которых связаны соответственно с I-IV выходами фотоприемника 9. Электронный блок обработки включает также последовательно соединенные первый сумматор 14, блок 15 сравнения и пятый усилитель 16, последовательно соединенные первый и второй блоки 17 и 18 вычитания, последовательно соединенные третий блок 19 вычитания и второй сумматор 20, источник 21 опорного напряжения. Выход первого усилителя 10 связан с первым входом третьего блока 19 вычитания, со вторым входом которого связан выход третьего усилителя 12, выход второго усилителя 11 связан с первым входом первого блока 17 вычитания, со вторым входом которого связан выход четвертого усилителя 13. Четыре входа первого сумматора 14 подключены соответственно к выходам первого, второго, третьего и четвертого усилителей 10-13. Выходы первого и третьего блоков 17 и 19 вычитания связаны со вторыми входами второго сумматора 20 и второго блока 18 вычитания соответственно, выход пятого усилителя 16 подключен к источнику 7 излучения, а второй вход блока 15 сравнения подключен к источнику 21 опорного напряжения.
Для управления манипулятором могут быть использованы звездочки 24 и 25 цепных передач, соединенные с его звеньями и связанные с приводами, подключенными к источнику питания и к системе управления (не показаны).
Для управления движением транспортного средства 2 блок 26 управления подключен к системе управления и к блоку 27 питания, связанному с последовательно соединенными микроконтроллером 28, шестым усилителем 29 и электроприводом 30. Входы микроконтроллера 28 соединены с выходами датчиков 31-34 текущего положения, скорости, углового и линейного перемещений. Датчики 31-34 выполнены в виде энкодеров, зубчатки которых установлены на каждом колесе транспортного средства 2.
Мобильный робот работает следующим образом.
При перемещении робота в исследуемом пространстве происходит касание подвижным щупом 5 поверхности препятствия. При этом наконечник 6 отклоняется от номинального положения. Момент касания фиксируется позиционно-чувствительным датчиком (ПЧД), направляющим командные сигналы в систему управления для регистрации координат, соответствующих этому моменту. При смещении наконечника 6 происходит адекватное смещение источника 7 излучения - светодиода на расстояние L1. Одновременно происходит смещение светящегося изображения светодиода на расстояние L2 в плоскости фоточувствительной поверхности фотоприемника 9 ПЧД, что приводит к появлению сигнала рассогласования, характеризующего величину и направление указанного смещения. Величины L1 и L2 могут несколько отличаться друг от друга с учетом линейного увеличения оптической системы, а именно: L2=κL1, где κ - коэффициент линейного увеличения оптической системы.
Выделение и обработка сигнала рассогласования осуществляется следующим образом. Светящееся изображение светодиода, формируемое оптической системой ПЧД, проецируется на приемную поверхность фотоприемника 9, с элементов которого через усилители 10-13 на блоки 17 и 19 вычитания поступают сигналы, пропорциональные световым потокам, падающим на соответствующие элементы фотоприемника 9. На выходе блока 17 вычитания формируется сигнал, равный (U2-U4), а на выходе блока 19 вычитания - сигнал, равный (U1-U3). На выходе блока 18 вычитания формируется сигнал (U1+U4)-(U2+U3), пропорциональный величине смещения светящегося изображения по координате X, а на выходе сумматора 20 - сигнал (U1+U2)-(U3+U4), пропорциональный величине смещения светящегося изображения по координате Y. Выходной сигнал сумматора 14 пропорционален суммарному световому потоку, поступающему на фотоприемник 9. Этот сигнал сравнивается с напряжением Uоп, поступающим на один из выходов блока 15 сравнения от источника 21 опорного напряжения, который через усилитель 16 управляет интенсивностью излучения светодиода (источника 7 излучения). При увеличении светового потока блок 15 сравнения вырабатывает сигнал, уменьшающий интенсивность излучения светодиода, а при уменьшении светового потока - сигнал, увеличивающий интенсивность его излучения. Это позволяет поддерживать постоянство суммарного светового потока U и, как следствие, постоянство статической характеристики системы.
Информация о наличии препятствия и о пройденном пути поступает в систему управления, соединенную с блоком 26 управления движением транспортного средства 2 и с устройством для обнаружения препятствия и управляющую ими. Блок 26 управления формирует и подает на входы микроконтроллера 28 входные воздействия по всем фазовым координатам электропривода 30, которые в сочетании с обратными связями по всем фазовым координатам позволяют через усилитель 29 сформировать управляющие воздействия на электропривод 30. Коэффициенты усиления обеспечивают необходимый закон изменения положения валов колес транспортного средства 2, задаваемый входным сигналом. Информация с выходов энкодеров - датчиков 31-34 поступает на вход микроконтроллера 28 и позволяет микроконтроллеру 28 определить - находится платформа 1 робота в движении или стоит. Причем для измерения пройденного пути (или задания пути, который должен пройти робот) необходимо знать только два параметра - количество оборотов колес и их диаметры.
Изобретение позволяет роботу перемещаться по произвольным траекториям, с высокой точностью обнаруживать препятствия в исследуемых пространствах. Информация о пройденном пути позволяет выровнять обороты каждого колеса и добиться необходимого движения робота, т.е. позволяет совершать управляемые повороты, избегая проскальзывания платформы робота при выполнении поворотов и разворотов, появляется возможность производить управляемые, с четко контролируемыми параметрами, подъезды и отъезды от препятствия и т.д. Размещение источника излучения в непосредственной близости от места контакта щупа с исследуемым препятствием позволяет увеличить точность обнаружения препятствия за счет исключения составляющей погрешности, вызванной изгибом щупа. Это дает возможность увеличить длину щупа без увеличения погрешности, что позволяет контролировать объекты больших размеров. Кроме того, поскольку деформация щупа не влияет на общую погрешность описываемой системы, можно применять систему подвеса щупа с увеличенной возвращающей силой, что положительным образом сказывается на точностных характеристиках устройства в целом.
| название | год | авторы | номер документа |
|---|---|---|---|
| Измерительная головка | 1985 |
|
SU1394034A1 |
| Способ определения деформации элементов конструкции дельта-робота, которая проявляется только в процессе его движения | 2020 |
|
RU2754423C1 |
| АВТОМАТИЧЕСКАЯ СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ ТРАНСПОРТНОГО СРЕДСТВА | 2013 |
|
RU2530704C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЯЕМОГО ПЕРЕДВИЖЕНИЯ СМАРТФОНА ПО ГОРИЗОНТАЛЬНОЙ ПОВЕРХНОСТИ | 2015 |
|
RU2627555C2 |
| Способ управления движением наземного роботизированного комплекса для садоводства вдоль линии посадки деревьев | 2023 |
|
RU2808316C1 |
| Роботизированный комплекс для ремонта дефектов сварных швов труб, изготовленных с использованием технологии лазерной сварки | 2017 |
|
RU2680166C1 |
| Способ и устройство мобильного робота для прохождения замкнутых контуров и лабиринтов | 2017 |
|
RU2670826C9 |
| Роботизированная пространственно-распределенная система радиоэлектронного подавления приемных устройств потребителей глобальных навигационных спутниковых систем | 2017 |
|
RU2666126C1 |
| Космический мобильный робот-инспектор | 2022 |
|
RU2783640C1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ДАЛЬНОСТИ И СКОРОСТИ ДВИЖЕНИЯ ОБЪЕКТОВ | 1999 |
|
RU2169373C2 |
Изобретение относится к робототехнике и может быть использовано в роботах, предназначенных для ликвидации чрезвычайных ситуаций, например, для обнаружения и уничтожения взрывоопасных устройств. Мобильный робот содержит платформу, установленную на транспортном средстве, устройство для обнаружения препятствия, систему управления с блоком управления движением транспортного средства и устройством для обнаружения препятствия и соединенную с ними, манипулятор, шарнирно установленный на платформе и выполненный в виде снабженных приводами и шарнирно соединенных между собой звеньев, на конечном из которых размещено устройство для обнаружения препятствия, имеющее подвижный щуп с наконечником и позиционно-чувствительный датчик. Блок управления движением транспортного средства подключен к блоку питания, связанному с последовательно соединенными микроконтроллером, шестым усилителем и электроприводом, входы микроконтроллера соединены с выходами датчиков текущего положения, скорости, углового и линейного перемещений, выполненных в виде энкодеров, зубчатки которых установлены на каждом колесе транспортного средства. Изобретение позволяет мобильному роботу перемещаться по произвольным траекториям, с высокой точностью обнаруживать препятствия, производить управляемые с четко контролируемыми параметрами подъезды и отъезды от препятствия. 5 ил.
Мобильный робот, содержащий платформу, установленную на транспортном средстве, устройство для обнаружения препятствия, систему управления с блоком управления движением транспортного средства и устройством для обнаружения препятствия и соединенную с ними, манипулятор, шарнирно установленный на платформе и выполненный в виде снабженных приводами и шарнирно соединенных между собой звеньев, на конечном из которых размещено устройство для обнаружения препятствия, имеющее подвижный щуп с наконечником и позиционно-чувствительный датчик, состоящий из оптически связанных источника излучения, объектива и фотоприемника, при этом устройство для обнаружения препятствия включает электронный блок обработки, выполненный в виде первого, второго, третьего и четвертого усилителей, последовательно соединенных первого сумматора, блока сравнения и пятого усилителя, последовательно соединенных первого и второго блоков вычитания, последовательно соединенных третьего блока вычитания и второго сумматора, источника опорного напряжения, причем выход первого усилителя связан с первым входом третьего блока вычитания, со вторым входом которого связан выход третьего усилителя, выход второго усилителя связан с первым входом первого блока вычитания, со вторым входом которого связан выход четвертого усилителя, четыре входа первого сумматора подключены соответственно к выходам первого, второго, третьего и четвертого усилителей, выходы первого и третьего блоков вычитания связаны со вторыми входами второго сумматора и второго блока вычитания соответственно, второй вход блока сравнения связан с выходом источника опорного напряжения, выход пятого усилителя подключен к источнику излучения, фотоприемник выполнен в виде четырехквадрантного фотодиода, центр которого размещен на одной прямой с оптической осью объектива и осью подвижного щупа, причем последний выполнен полым, а источник излучения установлен в его полости со стороны наконечника, при этом четыре выхода фотоприемника связаны соответственно с первым, вторым, третьим и четвертым усилителями, блок управления движением транспортного средства подключен к блоку питания, связанному с последовательно соединенными микроконтроллером, шестым усилителем и электроприводом, входы микроконтроллера соединены с выходами датчиков текущего положения, скорости, углового и линейного перемещений, выполненных в виде энкодеров, зубчатки которых установлены на каждом из колес транспортного средства.
| БАТАНОВ А.Ф | |||
| и др | |||
| Мобильные роботизированные, взрывотехнические комплексы | |||
| Специальная техника | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| МОБИЛЬНЫЙ РОБОТОТЕХНИЧЕСКИЙ КОМПЛЕКС | 2007 |
|
RU2364500C2 |
| МОБИЛЬНЫЙ РОБОТОТЕХНИЧЕСКИЙ КОМПЛЕКС | 2003 |
|
RU2241594C1 |
| US 4932831 A, 12.06.1990. | |||

