Изобретение относится к области робототехники и, в частности, к планированию движений автономных мобильных роботов (подводных аппаратов, беспилотных летательных аппаратов, наземных роботов) в заранее неизвестном окружении.
Известен способ коррекции курса мобильного робота. Этот робот содержит устройство для его перемещения, устройство для обнаружения препятствия, управляющую часть, соединенную с устройством для перемещения мобильного робота и устройством для обнаружения препятствия и управляющую ими, устройство для определения текущего местоположения мобильного робота, соединенное с управляющей частью, и источник питания. Устройство для определения текущего местоположения мобильного робота содержит первую обзорную телекамеру для создания изображения потолка помещения и распознавания базового знака на потолке и первую видеоплату, обрабатывающую изображение, полученное с первой обзорной телекамеры, и передающую данные в управляющую часть. Источник питания соединен с управляющей частью и аккумулирует электроэнергию и питает устройство для перемещения мобильного робота, устройство для обнаружения препятствия, устройство для определения местоположения и управляющую часть. Устройство для обнаружения препятствия содержит линейный лазер для излучения линейного светового пучка по направлению к препятствию, вторую обзорную телекамеру для распознавания отраженного от препятствия линейного светового пучка и вторую видеоплату для обработки видеоданных, полученных второй телекамерой (см. RU 2210492 С2, Бюл. №23, 2003 г.).
Недостатком этого решения является необходимость использования видеокамер и специальной разметки, нанесенной на потолок помещения, в котором движется робот, что не позволяет использовать его для автономных роботов, перемещающихся по открытой местности.
Известен способ автоматического управления наземным робототехническим комплексом, включающий радиообмен между пультом управления и робототехническим комплексом, обеспечение ввода и обработку входной информации, поступающей от бортовых датчиков, вычисление текущей ориентации и местоположения робототехнического комплекса, отличающийся тем, что при потере радиосвязи между пультом управления и робототехническим комплексом осуществляют его автоматический возврат в точку старта или в зону уверенного радиообмена по ранее пройденной траектории с корректировкой этой траектории в обход обнаруженных препятствий путем реализации на борту робототехнического комплекса базовых алгоритмов движения в заранее неизвестной обстановке по дальнометрическому изображению внешней среды с помощью навигационно-вычислительного блока (см. RU 2 574 938 С2, Бюл. №4 2016 г.).
Этот способ по своей технической сущности является наиболее близким к предлагаемому изобретению. Однако для формирования траекторий движения робота предлагается использовать трехмерную картину окружающей среды, построенную с помощью комплексной обработки данных, полученных от бортовой видеокамеры, и лазерных дальномеров. Распознавание видеоизображения и последующее комплексирование всех получаемых сигналов для формирования траекторий движения роботов в реальном масштабе времени имеет высокую сложность и требует использования мощных вычислительных средств. Это приводит к увеличению габаритов роботов и их стоимости. Кроме того, использование визуальной информации и лазерных дальномеров для автономных подводных роботов возможно в редких случаях и только на малых дистанциях до препятствий, что приводит к значительному снижению скорости их движения в неизвестном окружении, а в результате - к уменьшению производительности работы. Поэтому для подводных роботов основным источником информации об окружающей обстановке должны являться дешевые ультразвуковые сонары.
Задачей изобретения является устранение указанных выше недостатков, то есть формирование безопасных траекторий скоростного движения роботов в среде с препятствиями в реальном масштабе времени без использования сложных и дорогих технических и вычислительных средств.
Технический результат изобретения заключается в автоматическом формировании и последующей коррекции в реальном масштабе времени гладких траекторий движения любых мобильных роботов в неизвестном окружении на основе данных, получаемых от типовых и дешевых бортовых дальномеров, без использования сложных и длительных процедур обработки видеоизображений и построения трехмерных моделей окружающей среды. Это помимо удешевления роботов должно обеспечить увеличение скорости их движения, а следовательно, и производительности их работы, при гарантированном отсутствии столкновений с препятствиями в заранее неизвестной обстановке.
Поставленная задача решается тем, что в процессе автоматического формирования траекторий движения мобильного робота в неизвестном окружении, включающем определение местоположения робота, обработку информации от бортовых дальномеров для определения расстояний до возможных препятствий и формирование траектории движения с учетом обнаруженных препятствий, при этом указанную траекторию мобильного робота строят в виде гладкой кривой, проходящей по заранее заданной последовательности целевых точек, с обеспечением ее расположения от обнаруженных препятствий на расстоянии не меньшем, чем допустимое, при этом осуществляют непрерывную коррекцию траектории с учетом положения дополнительной целевой точки, координаты которой рассчитывают на основе данных об окружающих препятствиях, которые получают от бортовых дальномеров.
Сопоставительный анализ признаков заявляемого способа с признаками аналога и прототипа свидетельствует о его соответствии критерию "новизна".
При этом отличительные признаки формулы изобретения предназначены для решения следующих функциональных задач.
Признак «…траекторию мобильного робота строят в виде гладкой кривой, проходящей по заранее заданной последовательности целевых точек…» обеспечивает высокоточное и высокоскоростное движение мобильных роботов, особенно движущихся в пространстве, в условиях неизвестной окружающей среды с препятствиями.
Признак «…непрерывную коррекцию осуществляют с помощью построения дополнительной целевой точки, координаты которой рассчитывают на основе данных об окружающей среде, которые получают только от бортовых дальномеров..» обеспечивает формирование картины окружающей среды с помощью алгоритмов, имеющих небольшую вычислительную сложность, что позволяет реализовать режимы автономного движения в неизвестном окружении малогабаритных мобильных роботов различных типов.
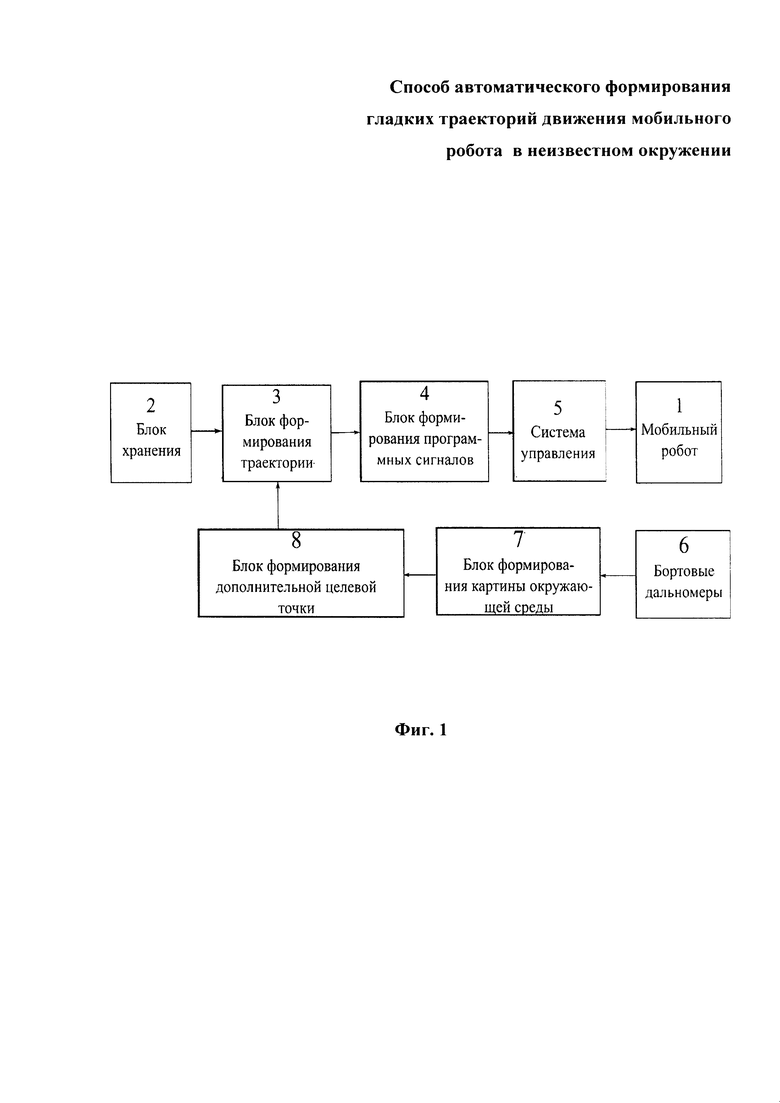
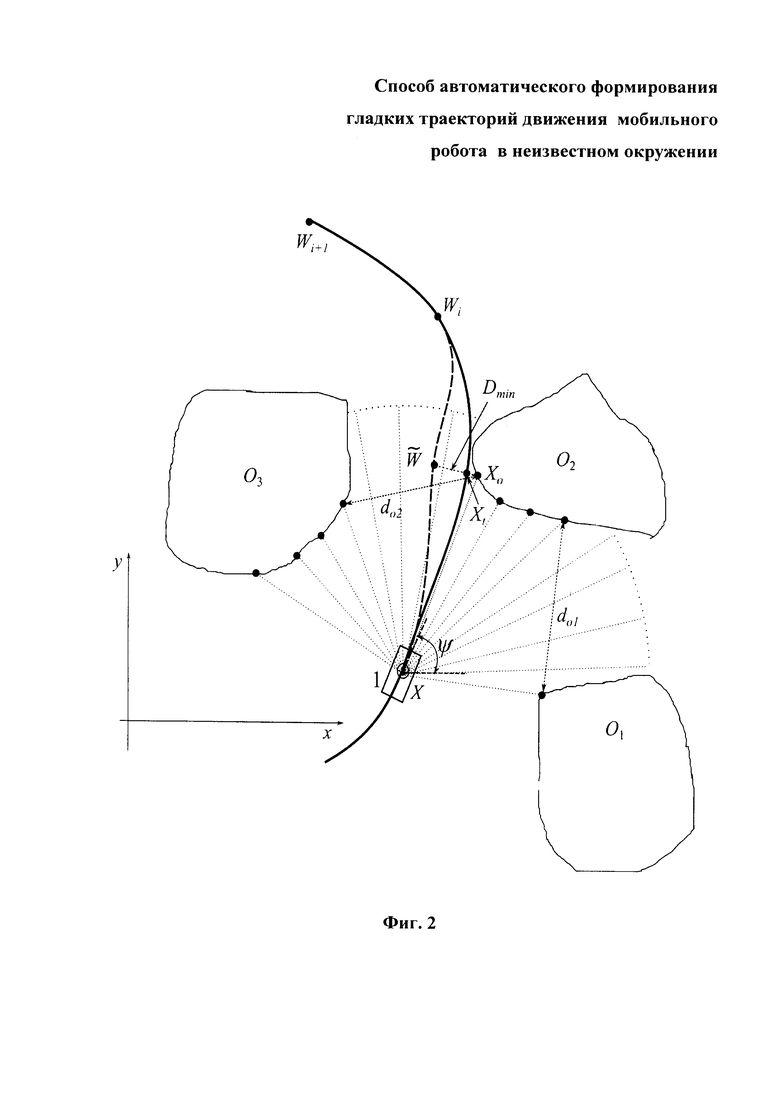
Заявленное изобретение иллюстрируется чертежами, где на фиг. 1 показана обобщенная схема построения бортовой системы автоматического формирования гладких траекторий движения робота в неизвестном окружении, а на фиг. 2 - схема движения мобильного робота в среде с препятствиями. На этих чертежах введены следующие обозначения: 1 - мобильный робот; 2 - блок хранения; 3 - блок формирования траектории; 4 - блок формирования программных сигналов; 5 - система управления исполнительными устройствами; 6 - бортовые дальномеры; 7 - блок формирования расстояний до возможных препятствий; 8 - блок формирования дополнительной целевой точки.
Кроме того, на фиг. 2 введены следующие обозначения:  - препятствия, расположенные в рабочей зоне робота; Wi(i=1, 2, 3,…) - целевые точки, задаваемые оператором перед началом выполнения миссии, по которым должна пройти гладкая траектория мобильного робота; doi(i=1, 2) - расстояния между соседними препятствиями, определенные по показаниям дальномеров; точечные линии - направления измерений бортовых дальномеров робота; черные точки - точки на препятствиях, обнаруженные соответствующими дальномерами; Ψ - текущий угол курса робота;
- препятствия, расположенные в рабочей зоне робота; Wi(i=1, 2, 3,…) - целевые точки, задаваемые оператором перед началом выполнения миссии, по которым должна пройти гладкая траектория мобильного робота; doi(i=1, 2) - расстояния между соседними препятствиями, определенные по показаниям дальномеров; точечные линии - направления измерений бортовых дальномеров робота; черные точки - точки на препятствиях, обнаруженные соответствующими дальномерами; Ψ - текущий угол курса робота;  - дополнительная целевая точка, корректирующая траекторию движения робота при обнаружении препятствий; X - текущее положение робота; Xo - точка на препятствии, обнаруженная соответствующим дальномером и являющаяся ближайшей к исходной траектории движения робота; Xt - точка на траектории, являющаяся ближайшей к точке XoDmin - минимально допустимая дистанция до препятствия; ху - абсолютная система координат.
- дополнительная целевая точка, корректирующая траекторию движения робота при обнаружении препятствий; X - текущее положение робота; Xo - точка на препятствии, обнаруженная соответствующим дальномером и являющаяся ближайшей к исходной траектории движения робота; Xt - точка на траектории, являющаяся ближайшей к точке XoDmin - минимально допустимая дистанция до препятствия; ху - абсолютная система координат.
Заявленный способ реализуется следующим образом.
Перед началом движения робота 1 оператор записывает в блок 2 набор целевых точек Wi(i=1, 2, 3,…), по которым должен пройти этот робот. По этим целевым точкам блок 3 рассчитывает параметры сплайнов Безье третьего порядка, которые формируют гладкую траекторию его движения. На основе этих параметров блок 4 вычисляет программные сигналы и подает их на входы системы 5 управления исполнительными устройствами робота 5.
В процессе движения по сформированной траектории робот с помощью дальномеров 6 непрерывно измеряет расстояния до возможных препятствий в направлениях, указанных точечными линиями. Если соответствующий дальномер обнаруживает препятствие, то на его выходе формируется сигнал, отличный от нуля и соответствующий расстоянию до обнаруженного препятствия, а если препятствия не обнаружено, то датчик формирует нулевой сигнал.
В блоке 7 по сигналам, поступившим от всех бортовых дальномеров, определяется количество и расположение препятствий относительно исходной траектории движения робота. Каждое препятствие характеризуется ненулевыми сигналами последовательно расположенных дальномеров, а проход между ними - нулевыми сигналами соседних дальномеров, не доходящими до препятствий.
Если расстояния между двумя обнаруженными соседними препятствиями, выявленные соответствующими дальномерами, не обеспечивают безопасный проход робота, то эти два препятствия рассматриваются как одно. Расстояния между соседними препятствиями(см. отрезки do1 и do2 на фиг. 2) определяются расстояниями между последней обнаруженной точкой на одном препятствии и первой обнаруженной точкой на соседнем. Для более точного определения расстояний между препятствиями количество дальномеров должно быть большим, а расстояния между направлениями их измерений, соответственно, малым.
После определения расположения препятствий относительно исходной траектории движения робота производится ее коррекция так, чтобы она проходила на расстоянии не меньшем Dmin, от препятствий (см. фиг. 2). Для этого в блоке 8 рассчитывается положение дополнительной целевой точки  , которая делит участок новой (скорректированной) траектории от текущего положения робота до ближайшей целевой точки Wt на два гладких участка, обеспечивая безопасный проход робота на минимально допустимом расстоянии между препятствиями или около них. Скорректированные траектории формируются на основе сплайнов Безье третьего порядка.
, которая делит участок новой (скорректированной) траектории от текущего положения робота до ближайшей целевой точки Wt на два гладких участка, обеспечивая безопасный проход робота на минимально допустимом расстоянии между препятствиями или около них. Скорректированные траектории формируются на основе сплайнов Безье третьего порядка.
В зависимости от расположения ближайшего к исходной траектории препятствия координаты точки могут быть рассчитаны двумя способами.
могут быть рассчитаны двумя способами.
1. Если препятствие полностью находится в стороне от траектории, то точка  должна располагаться на расстоянии, не меньшем Dmin до ближайшей к исходной траектории точки Хo на препятствии (см. фиг. 2).
должна располагаться на расстоянии, не меньшем Dmin до ближайшей к исходной траектории точки Хo на препятствии (см. фиг. 2).
2. Если исходная траектория пересекает обнаруженное препятствие, то точка  может располагаться слева или справа от препятствия также на расстоянии, не меньшем Dmin до ближайшей обнаруженной соответствующим дальномером крайней точки огибаемого препятствия. Точка
может располагаться слева или справа от препятствия также на расстоянии, не меньшем Dmin до ближайшей обнаруженной соответствующим дальномером крайней точки огибаемого препятствия. Точка  располагается слева от препятствия, если при приближении робота к нему по исходной траектории количество ненулевых сигналов левых (от центрального) дальномеров, относящихся к этому препятствию, меше количества ненулевых сигналов правых дальномеров. Иначе точку
располагается слева от препятствия, если при приближении робота к нему по исходной траектории количество ненулевых сигналов левых (от центрального) дальномеров, относящихся к этому препятствию, меше количества ненулевых сигналов правых дальномеров. Иначе точку  располагают справа.
располагают справа.
После коррекции траектории по точке  направление движения робота не изменяется, а в точке Wi сохраняется таким же, как и на исходной траектории.
направление движения робота не изменяется, а в точке Wi сохраняется таким же, как и на исходной траектории.
После первоначальной коррекции траектории движения робота при обходе препятствия не гарантируется, что вся эта траектория всегда будет находиться на безопасном расстоянии от препятствия, поскольку по мере прохода робота по указанной траектории его дальномерами могут быть обнаружены другие, вначале невидимые, но опасные для прохода участки препятствия. В последнем случае и вновь построенная траектория будет непрерывно корректироваться описанным выше способом так, чтобы она всегда располагалась на безопасном расстоянии (большем или равном Dmin) до огибаемого препятствия.
Поскольку траектория всегда корректируется с учетом текущего положения Х робота до ближайшей целевой точки, то это исключает его «застревание» в тупике. При попадании робота в проход между препятствиями, заканчивающимся недопустимым для дальнейшего движения «заужением» или тупиком, автоматически будет установлено, что текущая траектория движения теперь пересекает очередное препятствие, и далее будет сформирована новая траектория его обхода справа или слева. При этом для роботов, которые не могут осуществить разворот на месте, выбор величины Dmin будет сделан с учетом выполнения необходимого маневра (разворота с доступным радиусом).
Реализация предложенного способа автоматического формирования гладких траекторий движения робота в неизвестном окружении не вызывает принципиальных затруднений, поскольку при его реализации используются только типовые системы и устройства.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ НАЗЕМНЫМ РОБОТОТЕХНИЧЕСКИМ КОМПЛЕКСОМ | 2014 |
|
RU2574938C2 |
| РОБОТИЗИРОВАННАЯ ТРАНСПОРТНАЯ ПЛАТФОРМА | 2018 |
|
RU2701592C1 |
| СПОСОБ РЕШЕНИЯ ОГНЕВОЙ ЗАДАЧИ ДИСТАНЦИОННО УПРАВЛЯЕМЫМ НАЗЕМНЫМ РОБОТОТЕХНИЧЕСКИМ КОМПЛЕКСОМ ВОЕННОГО НАЗНАЧЕНИЯ В АВТОНОМНОМ РЕЖИМЕ | 2024 |
|
RU2840168C1 |
| Способ автоматического формирования пути и скорости движения роботизированного колесного подвижного объекта | 2023 |
|
RU2816411C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ НАЗЕМНЫМ РОБОТОТЕХНИЧЕСКИМ КОМПЛЕКСОМ ИЛИ ИХ ГРУППОЙ В ОБОРОНЕ | 2018 |
|
RU2718015C2 |
| СПОСОБ ДИСТАНЦИОННОГО УПРАВЛЕНИЯ МОБИЛЬНЫМ РОБОТОМ ПРИ НАЛИЧИИ ЗАДЕРЖЕК В КАНАЛЕ ПЕРЕДАЧИ ИНФОРМАЦИИ | 2022 |
|
RU2794556C1 |
| МОБИЛЬНАЯ АВТОНОМНАЯ РОБОТОТЕХНИЧЕСКАЯ ПЛАТФОРМА С БЛОЧНОЙ ИЗМЕНЯЕМОЙ СТРУКТУРОЙ | 2019 |
|
RU2704048C1 |
| СПОСОБ ПОСТРОЕНИЯ МАРШРУТА ДВИЖЕНИЯ И УПРАВЛЕНИЯ ДВИЖЕНИЕМ МОБИЛЬНОГО СЕРВИСНОГО РОБОТА В ТОРГОВОМ ПОМЕЩЕНИИ | 2021 |
|
RU2769710C1 |
| СПОСОБ УПРАВЛЕНИЯ ПОДВИЖНЫМ РОБОТОМ | 2015 |
|
RU2619542C1 |
| Способ локализации и построения навигационных карт мобильного сервисного робота | 2020 |
|
RU2740229C1 |
Изобретение относится к области робототехники, в частности к планированию движений автономных мобильных роботов, таких как подводные аппараты, беспилотные летательные аппараты, наземные роботы, в заранее неизвестном окружении. Способ включает определение местоположения робота, обработку информации от бортовых дальномеров для определения расстояния до возможных препятствий и формирование траектории движения с учетом обнаруженных препятствий. Траекторию движения мобильного робота формируют в виде гладкой кривой, проходящей по заранее заданной последовательности целевых точек, с обеспечением ее расположения от обнаруженных препятствий на расстоянии не меньшем, чем допустимое. При этом осуществляют непрерывную коррекцию траектории с учетом положения дополнительной целевой точки, координаты которой рассчитывают на основе данных об обнаруженных препятствиях, которые получают от бортовых дальномеров. Изобретение обеспечивает автоматическое формирование безопасных траекторий скоростного движения роботов в среде с препятствиями в реальном масштабе времени без использования сложных и дорогих технических и вычислительных средств. 2 ил.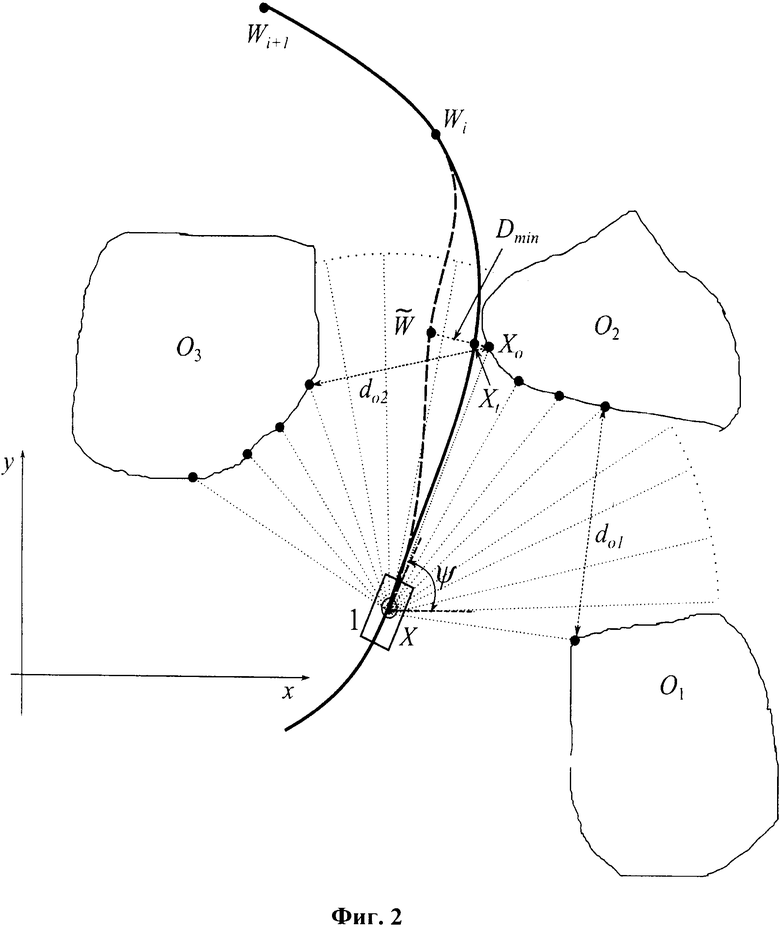
Способ автоматического формирования гладких траекторий движения мобильного робота в неизвестном окружении, отличающийся тем, что он включает определение местоположения робота, обработку информации от бортовых дальномеров для определения расстояния до возможных препятствий и формирование траектории движения с учетом обнаруженных препятствий, причем траекторию движения мобильного робота формируют в виде гладкой кривой, проходящей по заранее заданной последовательности целевых точек, с обеспечением ее расположения от обнаруженных препятствий на расстоянии не меньшем, чем допустимое, при этом осуществляют непрерывную коррекцию траектории с учетом положения дополнительной целевой точки, координаты которой рассчитывают на основе данных об обнаруженных препятствиях, которые получают от бортовых дальномеров.
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ НАЗЕМНЫМ РОБОТОТЕХНИЧЕСКИМ КОМПЛЕКСОМ | 2014 |
|
RU2574938C2 |
| Устройство для автоматического регулирования подачи при бурении сбоечно-буровыми машинами | 1949 |
|
SU83729A1 |
| СПОСОБ НАВИГАЦИОННОГО ОБЕСПЕЧЕНИЯ АВТОНОМНОГО ПОДВОДНОГО РОБОТА, КОНТРОЛИРУЕМОГО С БОРТА ОБЕСПЕЧИВАЮЩЕГО СУДНА | 2007 |
|
RU2344435C1 |
| МНОГОФУНКЦИОНАЛЬНЫЙ РОБОТОТЕХНИЧЕСКИЙ КОМПЛЕКС ОБЕСПЕЧЕНИЯ БОЕВЫХ ДЕЙСТВИЙ | 2013 |
|
RU2533229C2 |
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ ЛЕТАТЕЛЬНОГО АППАРАТА | 2012 |
|
RU2496081C1 |
| CN 101436073 A, 20.05.2009 | |||
| US 20040138780 A1, 15.07.2004. | |||

