Изобретение относится к вооружению и средствам РХБ защиты, в частности к средствам РХБ разведки.
Беспилотный летательный аппарат (далее по тексту БПЛА) - летательный аппарат не имеющий на борту экипажа (пилота) и способный самостоятельно целенаправленно перемещаться в воздухе в автономном режиме или посредством дистанционного управления [1].
В настоящее время, по оценкам большинства западных экспертов, США и страны НАТО в будущих войнах и вооруженных конфликтах будут делать ставку на применение БПЛА [2]. Современные БПЛА позволяют использовать их не только для решения задач РХБ разведки в военное время, но также и для контроля РХБ обстановки при ликвидации последствий аварий на радиационно-, химически и биологически опасных объектах. БПЛА вертолетного типа достаточно эффективно могут использоваться для выявления и оценки РХБ обстановки в виду наличия возможности зависания на месте.
Расширение спектра применения БПЛА ставит ряд новых задач:
- необходимость обеззараживания БПЛА, выполнявшего задачи в условиях РХБ заражения, причем в автоматическом (полуавтоматическом) режиме и без выхода экипажа из машины РХБ разведки;
- возможность реализации высокоэффективных способов и методов при обеззараживании «чувствительного оборудования»: орошение мелкодисперсными аэрозолями, парогазовый способ, обработка пенными рецептурами;
- сокращение затрат времени на обеззараживание, расхода рецептур, требуемых для обеззараживания, а также снижение трудоемкости данного процесса.
Одним из направлений решения определенных выше задач является разработка конструкции технического средства, предназначенного для обеззараживания БПЛА РХБ разведки вертолетного типа, с возможностью его размещения непосредственно на корпусе машин РХБ разведки для мобильности перемещения.
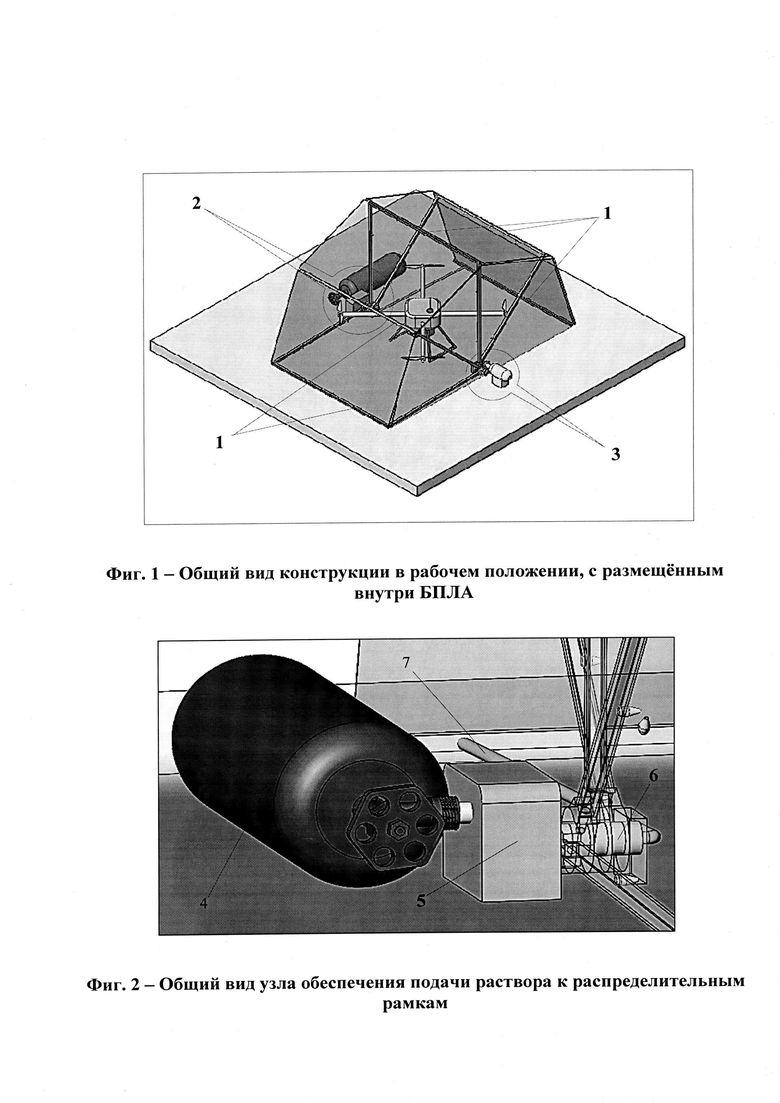
Предлагаемая мобильная установка для обеззараживания БПЛА вертолетного типа (фиг. 1), представляет собой устанавливаемую на корпус машин РХБ разведки конструкцию рамочного типа, обеспечивающую в автоматическом (полуавтоматическом) режиме, без выхода экипажа из машины обеззараживание БПЛА.
Мобильная установка для обеззараживания беспилотных летательных аппаратов вертолетного типа состоит из:
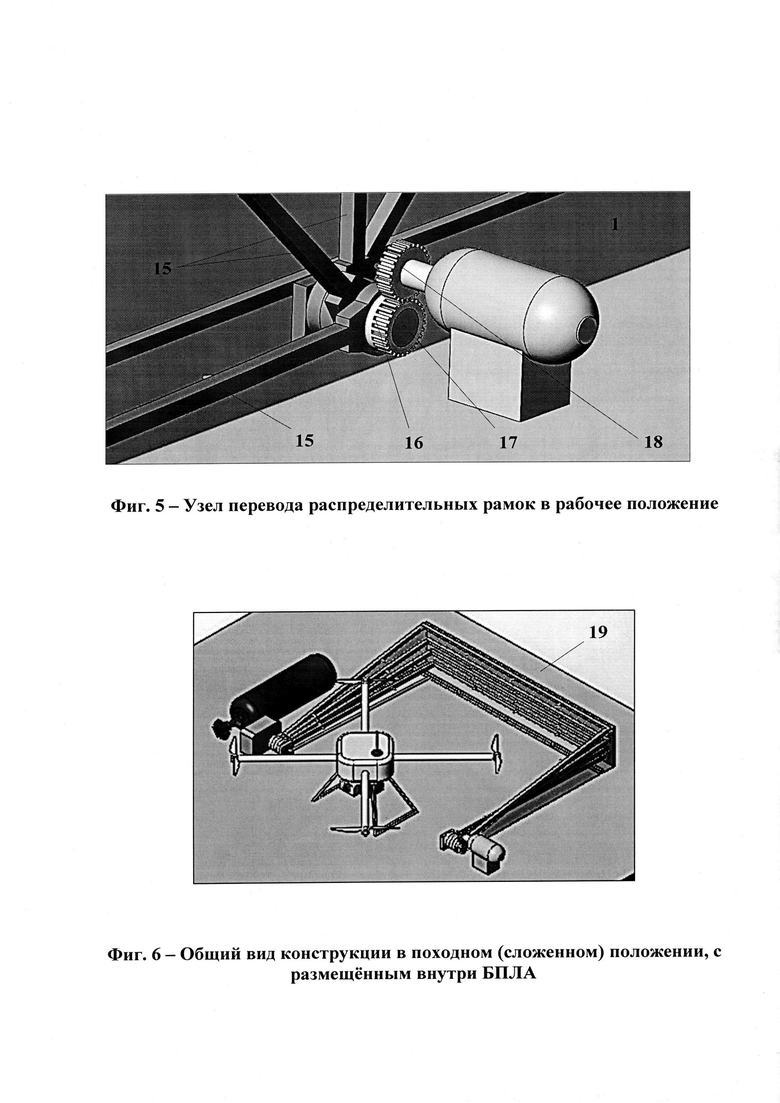
- узла обеспечения подачи раствора к распределительным рамкам (2) (фиг. 2), который функционирует следующим образом: за счет избыточного давления, раствор из емкости (4), проходя через блок управления подачей раствора (5) и распределительный коллектор (6), по внутренней полости рамок и трубке (7) подается к распылителям. Блок управления подачей раствора обеспечивает автоматическую (по срабатыванию концевого выключателя положения распределительных рамок) подачу раствора из емкости (4) в распределительный коллектор (6).
- распределительного коллектора (фиг. 3), представляющий собой полый цилиндр, в котором имеется одно входное отверстие (8) и 5 выходных отверстий (9) и (10). Из отверстий (9) раствор поступает в распределительные рамки только когда они находятся в рабочем положении, отверстие (10) обеспечивает подачу раствора к нижней, неподвижной рамке.
- распределительных рамок (1) (фиг. 4) выполненных из полой металлической трубы квадратного сечения по периметру которой расположены технологические отверстия в которые вставлены распылители (11) для подачи раствора, в нижней части каждой рамки находится кольцевое опорное основание (12) имеющее отверстие (13) для поступления раствора из распределительного коллектора, при этом ведущая рамка имеет на правом опорном кольце зубчатую шестерню (14), позволяющую ей перемещаться из транспортного положения в рабочее. Распределительные рамки закреплены на единых опорных узлах, которыми являются цилиндрический распределительный коллектор слева, и опорная ось справа.
- узла перевода распределительных рамок в рабочее положение (3) (фиг. 5), обеспечивает установку распределительных рамок (15) в заданное (рабочее и походное) положение посредством передачи крутящего момента от шестерни (18) электродвигателя к шестерни (16) кольцевой опоры ведущей рамки закрепленной на оси основания (17).
При этом, в процессе движения ведущей рамки, посредством натяжения тента, последовательно устанавливаются в рабочее положение остальные распределительные рамки. Перевод конструкции в походное положение (фиг. 6), обеспечивается за счет передачи толкающего усилия от ведущей рамки к остальным, по ходу ее движения в обратном направлении. г
Обеззараживание осуществляется следующим образом: после посадки зараженного БПЛА на основание конструкции, рамки устанавливаются в рабочее положение и обеспечивают подачу и нанесение раствора для обеззараживания на зараженный БПЛА. Кроме этого, посредством закрепленного на рамках тента, рамочная конструкция по принципу капюшона, формирует рабочее пространство обеспечивающее исключение влияния климатических факторов на процесс обеззараживания зараженного объекта, а также обеспечивает возможность реализации высокоэффективных способов и методов обеззараживания «чувствительного оборудования»: орошение мелкодисперсными аэрозолями, парогазовый способ обработки, обработка пенными рецептурами.
Источники информации
1. Официальный сайт Большая российская энциклопедия https://bigenc.ru/technology and technique /text/ 4087725. Дата обращения 19 октября 2019.
2. Сытин Л.Е. Самое современное оружие и боевая техника. - М.: ACT, 2017. - 656 с. - ISBN978-5-17-090382-5.

Изобретение относится к области обработки беспилотных летательных аппаратов (БПЛА) с целью обеззараживания. Мобильная установка для обеззараживания беспилотных летательных аппаратов вертолетного типа содержит распределительные рамки, выполненные из полой металлической трубы квадратного сечения, по периметру которой расположены технологические отверстия, в которые вставлены распылители для подачи раствора; узел обеспечения подачи раствора к распределительным рамкам и узел перевода распределительных рамок в рабочее положение. Узел обеспечения подачи раствора к распределительным рамкам состоит из емкости, блока управления подачей раствора, распределительного коллектора и трубки. При этом распределительный коллектор представляет собой полый цилиндр из металла, имеющий входное отверстие, боковые выходные отверстия и торцевое выходное отверстие. Узел перевода распределительных рамок в рабочее положение состоит из электродвигателя, передающего крутящий момент от шестерни (18) электродвигателя к шестерне (16) кольцевой опоры ведущей рамки для приведения ее в движение. Изобретение обеспечивает обеззараживание БПЛА в автоматическом (полуавтоматическом) режиме, сокращение затрат времени на обеззараживание, расхода рецептур, требуемых для обеззараживания, а также снижение трудоемкости данного процесса. 4 з.п. ф-лы, 6 ил.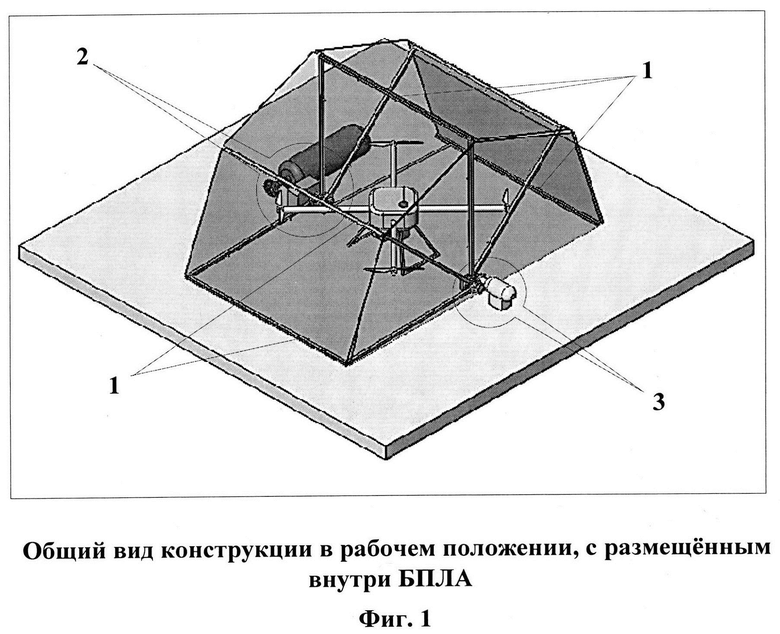
1. Мобильная установка для обеззараживания беспилотных летательных аппаратов вертолетного типа, отличающаяся тем, что содержит распределительные рамки, выполненные из полой металлической трубы квадратного сечения, по периметру которой расположены технологические отверстия, в которые вставлены распылители для подачи раствора; узел обеспечения подачи раствора к распределительным рамкам, состоящий из емкости, блока управления подачей раствора, распределительного коллектора и трубки, причем распределительный коллектор представляет собой полый цилиндр из металла, имеющий входное отверстие, боковые выходные отверстия и торцевое выходное отверстие; узел перевода распределительных рамок в рабочее положение, состоящий из электродвигателя, передающего крутящий момент от шестерни (18) электродвигателя к шестерне (16) кольцевой опоры ведущей рамки для приведения ее в движение.
2. Установка по п. 1, отличающаяся тем, что она выполнена с возможностью перевода конструкции из сложенного состояния в рабочее положение при прилете БПЛА на установку, а также с возможностью подачи раствора через распылители на БПЛА за счет избыточного давления, обеспечивающего прохождение раствора из емкости через блок управления подачей раствора и распределительный коллектор по внутренней полости рамок.
3. Установка по п. 1, отличающаяся тем, что выполнена с возможностью формирования рабочего пространства посредством закрепленного на рамках тента, обеспечивая исключение влияния климатических факторов на процесс обеззараживания зараженного БПЛА.
4. Установка по п. 1, отличающаяся тем, что с ее помощью можно производить обработку методами: орошения мелкодисперсными аэрозолями, парогазовым способом обработки, обработкой пенными рецептурами.
5. Установка по п. 1, отличающаяся тем, что для мобильности она расположена на базе машины РХБ разведки.
| Установка для мойки летательного аппарата | 1980 |
|
SU935381A1 |
| US 4668301 A1, 26.05.1987 | |||
| CN 109131931 A, 04.01.2019 | |||
| WO 2000007879 A1, 17.02.2000 | |||
| JP 58122295 A, 20.07.1983. | |||

