ОБЛАСТЬ ТЕХНИКИ
Изобретение относится к области контроля движения дорожного транспорта, а именно к способу и системе определения скорости движения транспортного средства (ТС) на протяженном участке автодороги.
УРОВЕНЬ ТЕХНИКИ
Известна система фиксации нарушений скоростного режима транспортным средством (RU 110856, 27.11.2011), содержащая по меньшей мере два регистратора, каждый из которых включает в себя по меньшей мере один компьютер и видеокамеру и выполнен с возможностью захвата изображения транспортного средства, отличающаяся тем, что каждый регистратор оснащен приемником глобальной спутниковой навигационной системы для связи с глобальной спутниковой навигационной системой и выполнен с возможностью определения своих географических координат и синхронизации времени, причем дополнительно компьютер через межсетевой экран с криптопровайдером связан с адаптером и модемом, который через систему связи оператора посредством сети передачи данных соединен с вычислительным центром, выполненным с возможностью вычисления скорости транспортного средства по данным, получаемым с по меньшей мере двух регистраторов, причем криптопровайдер установлен с возможностью защиты регистратором обрабатываемых данных электронно-цифровой подписью.
Недостатками данного решения является измерение скорости только на прямолинейном участке и относительно высокая погрешность измерения.
Известен способ регистрации нарушений правил дорожного движения (RU 2493604, 20.09.2013). Данное изобретение относится к области контроля движения дорожного транспорта и предназначено для использования при осуществлении контроля соблюдения Правил дорожного движения, выявления и регистрации нарушений Правил конкретными транспортными средствами. В качестве средства видеофиксации используют одну заранее откалиброванную видеокамеру, при этом обработку данных о движении ТС производят с применением определения по изображениям указанной видеокамеры положений ТС относительно дороги, по которой перемещаются указанные ТС. По ряду последовательных изображений видеокамеры определяют скорости ТС. Для определения скоростей и положений ТС относительно дороги в абсолютном масштабе расстояний используют контрольные точки ТС, абсолютные расстояния между которыми заранее известны.
Недостатком известного решения является контроль скорости в определенной точке, а не на протяженном участке дороги.
Известна система автоматизированного мониторинга транспортного потока с функцией определения средней скорости транспортных средств (RU 135828, 20.12.2013), которая в автоматическом режиме осуществляет идентификацию государственных регистрационных знаков (ГРЗ) ТС, измеряет среднюю скорость движения ТС и фиксирует нарушения скоростного режима движения, а также выполняет ряд других функций по мониторингу транспортного потока. Заявленная система может быть использована в виде стационарного устройства, размещенного в непосредственной близости от автодороги. Система включает по меньшей мере два регистратора, каждый из которых включает по меньшей мере одну видеокамеру и компьютер, соединенный каналом связи с удаленным сервером, при этом удаленный сервер содержит блок вычисления средней скорости транспортного средства на участке на основе полученных данных от двух соседних регистраторов, блок синхронизации времени между регистраторами, блок сравнения распознанных номерных знаков с внешней базой данных с целью выявления и контроля за перемещением интересующих транспортных объектов, и блок хранения информации. Техническим результатом является создание системы автоматизированного мониторинга транспортного потока с функцией определения средней скорости транспортного средства на участке, которая обладает расширенной функциональностью по сравнению с известными аналогами и применима при любом рельефе местности.
Недостатками известной системы является низкая точность измерения средней скорости движения ТС на протяженном участке в связи с относительно высокой погрешностью измерения положения ТС в момент его фиксации на каждом из участков контроля.
Известен регистратор для контроля движения транспортного средства (RU 151712, 10.04.2015), включающий в себя, по меньшей мере, один процессорный блок, видеокамеру, блок синхронизации времени, блок приема-передачи данных и выполнен с возможностью захвата изображения транспортного средства, отличающийся тем, что он оснащен модулем определения координат транспортного средства, выполненным с возможностью определения координат транспортного средства в зоне контроля регистратора, причем процессорный блок заявленного устройства может вычислять среднюю скорость движения ТС.
Недостатками известного регистратора является низкая точность измерения средней скорости движения ТС на протяженном участке в связи с относительно высокой погрешностью измерения положения ТС в момент его фиксации на каждом из участков контроля.
Известна система определения скорости ТС с помощью захвата видеоизображений (US 8184863, 22.05.2012), которая позволяет определить скорость движения ТС, в том числе среднюю скорость, с помощью фиксации ТС в зоне камеры с помощью наложения виртуальной сетки, размечающей дорогу на участки для более точного определения фактической скорости ТС в конкретном участке дороги.
Недостатками известного регистратора является низкая точность измерения средней скорости движения ТС на протяженном участке в связи с относительно высокой погрешностью измерения положения ТС в момент его фиксации на каждом из участков контроля.
РАСКРЫТИЕ ИЗОБРЕТЕНИЯ
Задачей заявленного изобретения является создание нового способа и системы для определения средней скорости движения ТС на протяженном участке дороги.
Техническим результатом является повышение точности определения средней скорости ТС на контролируемом участке дороги.
Заявленный результат достигается за счет выполнения способа определения средней скорости движения ТС на протяженном участке дороги, содержащего этапы, на которых:
- определяют протяженность S зоны контроля на участке дороги, устанавливают в начале и конце упомянутой зоны средства регистрации проезда ТС, причем каждое из средств регистрации проезда ТС выполнено с возможностью виртуального разделения видимой части дороги на несколько зон Nz фиксации ТС;
- определяют и запоминают номер регистрационного знака ТС, время Т1 проезда ТС и номер зоны Nz1 фиксации ТС, определенной по кадру фотоснимка, сделанного средством регистрации ТС на въезде в зону контроля участка дороги;
- определяют и запоминают номер регистрационного знака ТС, время Т2 проезда ТС и номер зоны Nz2 фиксации ТС, определенной по кадру фотоснимка, сделанного средством регистрации ТС при выезде из зоны контроля участка дороги;
- определяют пройденный путь S' ТС в зависимости от номеров зон Nz1, Nz2, в которых оно было зафиксировано, и длин Lz1, Lz2 упомянутых зон;
- определяют время ΔT проезда контролируемого участка дороги ТС как разность между временем выезда Т2 и временем въезда Т1;
- определяют среднюю скорость ΔV движения ТС на контролируемом участке дороги по формуле ΔV=S'/ΔT.
Заявленный результат достигается с помощью системы определения средней скорости движения ТС на протяженном участке дороги, которая содержит, по меньшей мере, два средства регистрации ТС, каждое из которых установлено на въезде и выезде из зоны контроля средней скорости на участке дороги, и сервер, причем
- каждое из упомянутых средств фиксации ТС, выполнено с возможностью виртуального разделения видимой части дороги на несколько зон Nz фиксации ТС, фотофиксации ТС для определения номера регистрационного знака ТС, времени Т1 и Т2 проезда ТС, номеров зон Nz1 и Nz2 фиксации ТС и длин Lz1, Lz2 каждой зоны и передачи полученных фотоснимков на сервер;
- сервер выполнен с возможностью вычисления пройденного пути S' ТС в зависимости от номеров зон Nz1, Nz2, в которых оно было зафиксировано, и длин Lz1, Lz2 упомянутых зон, вычисления времени ΔT проезда контролируемого участка дороги ТС в зависимости от времени проезда Т1, Т2 зон контролируемого участка дороги и вычисления средней скорости ΔV движения ТС на контролируемом участке дороги по формуле ΔV=S'/ΔT.
В частном варианте осуществления заявленного изобретения зоны Nz фиксации ТС разделяют видимую часть дороги на виртуальные участки равной ширины.
В другом частном варианте осуществления заявленного изобретения расстояние S', пройденное ТС, определяется как S'=S+f(Nz1, Lz1)+f(Nz2, Lz2)
где f - функция, определяющая положение ТС на участке дороги в зависимости от положения ТС в кадре фотоизображения.
В другом частном варианте осуществления заявленного изобретения каждое из средств регистрации ТС связано со спутниками глобальной навигационной системы.
В другом частном варианте осуществления заявленного изобретения средства регистрации ТС передают данные на сервер с помощью беспроводных сетей передачи данных, например, GPRS, 3G, 4G, LTE, Wi-Fi, WiMax.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Фиг. 1 иллюстрирует общий принцип работы заявленного решения.
Фиг. 2 иллюстрирует принцип зонирования дороги.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
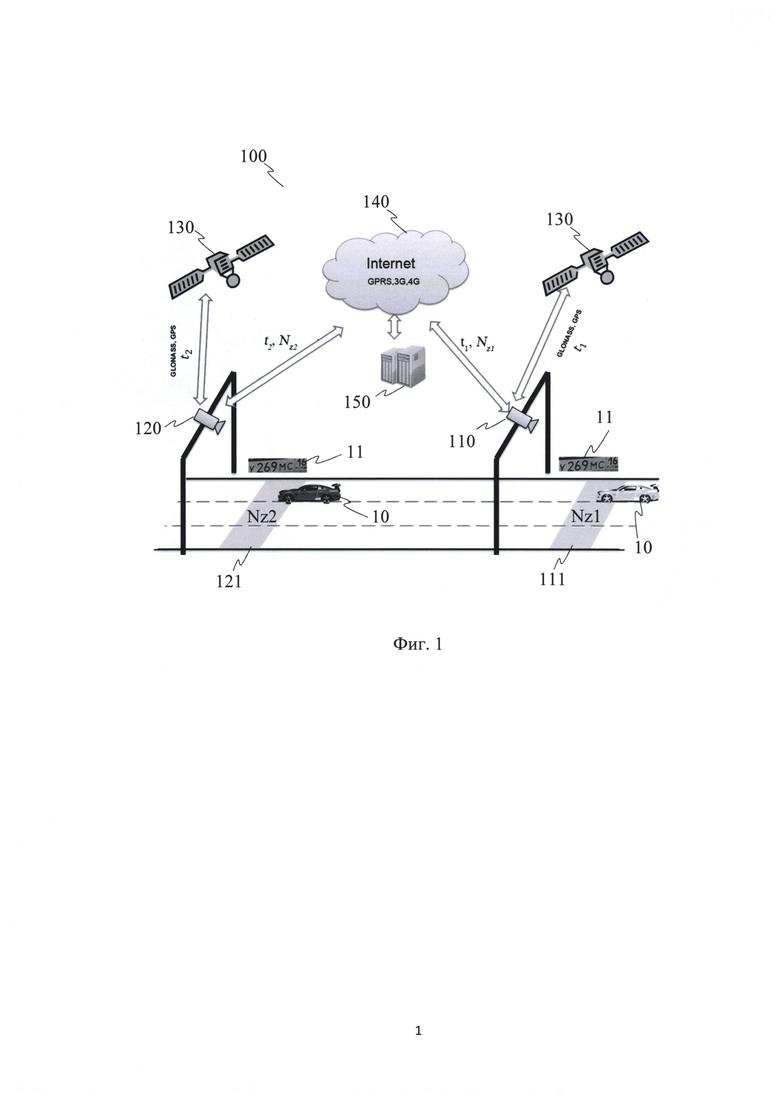
На Фиг. 1 представлен общий вид системы 100, реализующей выполнение заявленного способа определения средней скорости движения ТС 10, на протяженном участке дороги. Система 100 включает в себя, по меньшей мере, два устройства регистрации ТС 10. Устройства 110, 120 регистрации ТС 10 устанавливаются на въезде 111 и выезде 121 из зоны контроля средней скорости ΔV на участке дороги, причем протяженность S зоны контроля заранее определена.
Каждое из устройств регистрации ТС 110, 120 содержит средство фотофиксации и/или видеофиксации ТС 10 для получения фотоизображения ТС 10 в высоком разрешении. Каждое из устройств 110, 120 распознает область на фотоизображении, содержащую представление номерного знака ТС, и преобразовывает полученное графическое представление номерного знака ТС в буквенно-цифровой вид. Первоначальное фотоизображение, содержащее изображение ТС 10, сохраняются на каждом из средств регистрации ТС 110, 120, на котором оно было сделано. Средства регистрации ТС 110, 120 связаны со спутниками глобальной навигационной системы (ГНС) 130, например, GPS, ГЛОНАСС, BeiDou, что позволяет определить время фиксации ТС 10 в каждой зоне 111, 121 соответствующего устройства регистрации ТС 110, 120. Каждая из зон 111, 121 представляет собой область, видимую устройством регистрации ТС 110, 120, и каждая из упомянутых областей разделена на Zn количество зон.
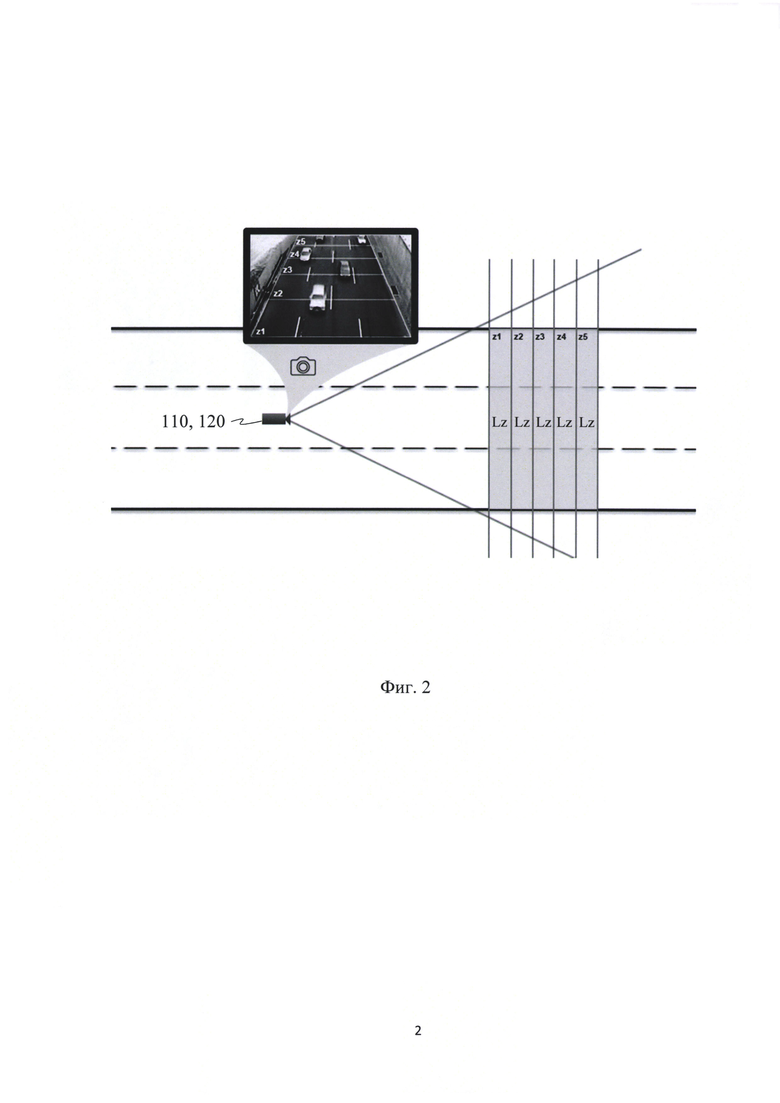
На Фиг. 2 показан принцип зонирования областей видимости устройств регистрации ТС 110, 120. Каждая зона видимости 111, 121 делится на Zn количество виртуальных зон, в частном примере, на пять зон z1-z5, причем данные зоны могут быть как равной, так и разной ширины. Зоны z1-z5 постоянно накладываются на видимую область средства фотофиксации и/или видеофиксации, установленного на средствах регистрации ТС 110, 120 и разделяют всю ширину дороги независимо от количества полос движения.
Заявленное решение работает следующим образом.
Вначале происходит захват изображения ТС 10, фотоизображение ТС в сохраняется в блоке памяти соответствующего устройства 110 или 120. Затем осуществляется определение и запоминание номера регистрационного знака 11 ТС 10, времени Т1 проезда ТС 10 и номера зоны Nz1 фиксации ТС 111, определенной по кадру фотоизображения, сделанного средством регистрации ТС 110 на въезде в зону 111 контроля участка дороги. Затем осуществляют захват изображения ТС 10 с помощью средства 120, определение и запоминание номера регистрационного знака 11 ТС 10, времени Т2 проезда ТС 10 и номер зоны Nz2 фиксации ТС 121, определенной по кадру фотоизображения, сделанного средством регистрации ТС 120 при выезде из зоны 121 контроля участка дороги.
Полученную информацию от средств 110, 120 передают с помощью каналов 140 передачи данных, например с помощью беспроводных сетей GPRS, 3G, 4G, LTE, Wi-Fi, WiMax, на сервер 150, с помощью которого выполняется вычисление пройденного пути S' ТС 10 в зависимости от номеров зон Nz1, Nz2, в которых оно было зафиксировано, и длин Lz1, Lz2 упомянутых зон. Пройденный путь определяется по выражению:

где f - функция, определяющая положение ТС на участке дороги в зависимости от положения ТС в кадре фотоснимка.
На сервере 150 определяется время ΔT проезда контролируемого участка дороги ТС 10 в зависимости от времени проезда T1, Т2 зон 111, 121 контролируемого участка дороги, с помощь которого затем определяют среднюю скорость ΔV движения ТС 10 на контролируемом участке дороги длиной S по формуле ΔV=S'/ΔT.
Время ΔT определяется как разность между временем выезда Т2 и временем въезда Т1.
Сервер 150 представляет собой, по меньшей мере, одну ЭВМ. Сервер 150 содержит объединенные шиной данных процессорный блок, содержащий один или более процессоров, блок памяти, устройства и интерфейсы ввода/вывода. Блок памяти включает исполняемое процессорным блоком программное обеспечение, которое позволяет выполнить необходимые операций вычисления тех или иных параметров.
За счет использования виртуального разделения контролируемых участков дороги 111, 121 на определенное количество зон, снижается ошибка определения местоположения ТС 10, причем точность определения ТС 10 зависит от количества зон Zn наложенных на отображение области видимости средствами регистрации ТС 110, 120.
Заявленное изобретение позволяет произвести регистрацию каждого ТС, двигающего в потоке, на въезде в зону контроля средней скорости и выезде из нее.
Заявленное решение может применяться как комплекс для фиксации нарушений скоростного режима на протяженных участках дорог. В этом случае изображения ТС, полученные в зонах 111 и 121, соответствующие буквенно-цифровой последовательности, определяющей номерной знак нарушителя, запрашиваются с помощью соответствующего программного обеспечения сервером.
Представленное в настоящих материалах заявки описание заявленного решения раскрывает лишь предпочтительные варианты его осуществления и не должны трактоваться как ограничивающие иные, частные варианты осуществления заявленного решения, не выходящие за объем представленных сведений, которые должны быть очевидными для специалистов в данной области техники, имеющих обычную квалификацию, на которых рассчитано данное изобретение.
Группа изобретений относится к области контроля движения дорожного транспорта, а именно к способу и системе определения средней скорости движения транспортного средства (ТС) на протяженном участке автодороги. Способ и система содержат этапы на которых определяют протяженность S зоны контроля на участке дороги, устанавливают в начале и конце упомянутой зоны средства регистрации проезда ТС, определяют и запоминают номер регистрационного знака ТС, время проезда ТС и номер зоны фиксации ТС, определенной по кадру фотоснимка, определяют пройденный путь ТС, определяют среднюю скорость движения ТС на контролируемом участке дороги. Технический результат заключается в повышении точности определения средней скорости ТС на контролируемом участке дороги. 2 н. и 5 з.п. ф-лы, 2 ил.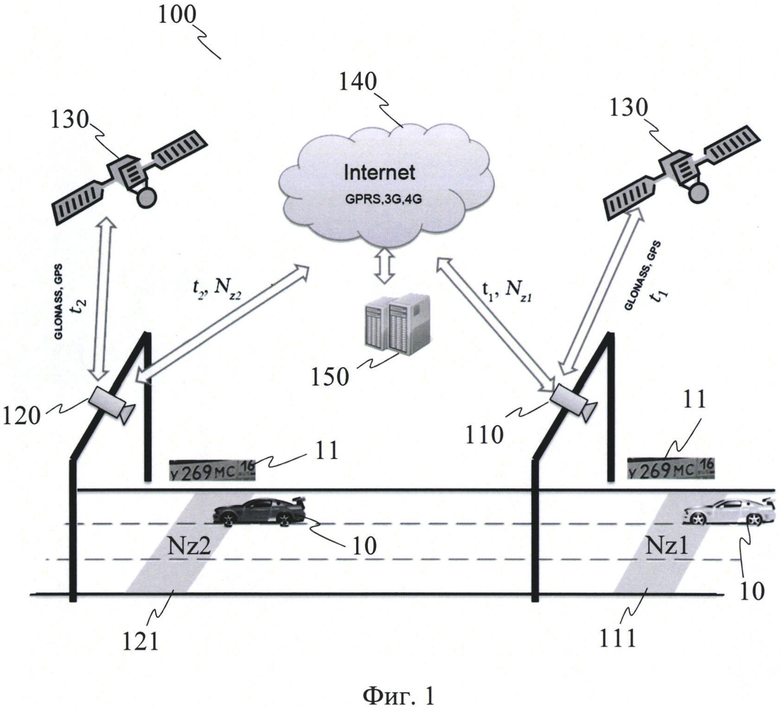
1. Способ определения средней скорости движения транспортного средства (ТС) на протяженном участке дороги, содержащий этапы, на которых:
- определяют протяженность S зоны контроля на участке дороги, устанавливают в начале и конце упомянутой зоны средства регистрации проезда ТС, причем каждое из средств регистрации проезда ТС выполнено с возможностью виртуального разделения видимой части дороги на несколько зон Nz фиксации ТС;
- определяют и запоминают номер регистрационного знака ТС, время Т1 проезда ТС и номер зоны Nz1 фиксации ТС, определенной по кадру фотоизображения, сделанного средством регистрации ТС на въезде в зону контроля участка дороги;
- определяют и запоминают номер регистрационного знака ТС, время Т2 проезда ТС и номер зоны Nz2 фиксации ТС, определенной по кадру фотоизображения, сделанного средством регистрации ТС при выезде из зоны контроля участка дороги;
- определяют пройденный путь S' ТС в зависимости от номеров зон Nz1, Nz2, в которых оно было зафиксировано, и длин Lz1, Lz2 упомянутых зон;
- определяют время ΔT проезда контролируемого участка дороги ТС как разность между временем выезда Т2 и временем въезда Т1;
- определяют среднюю скорость ΔV движения ТС на контролируемом участке дороги по формуле ΔV=S'/ΔT.
2. Способ по п. 1, отличающийся тем, что зоны Nz фиксации ТС разделяют видимую часть дороги на виртуальные участки равной ширины.
3. Способ по п. 1, отличающийся тем, что расстояние S', пройденное ТС, определяется как S'=S+f(Nz1, Lz1)+f(Nz2, Lz2)
где f - функция, определяющая положение ТС на участке дороги в зависимости от положения ТС в кадре фотоснимка.
4. Система определения средней скорости движения ТС на протяженном участке дороги, содержащая по меньшей мере два средства регистрации ТС, каждое из которых установлено на въезде и выезде из зоны контроля средней скорости на участке дороги, и сервер, причем
- каждое из упомянутых средств фиксации ТС выполнено с возможностью виртуального разделения видимой части дороги на несколько зон Nz фиксации ТС, фотофиксации ТС для определения номера регистрационного знака ТС, времени Т1 и Т2 проезда ТС, номеров зон Nz1 и Nz2 фиксации ТС и длин Lz1, Lz2 каждой зоны и передачи полученных фотоизображений на сервер;
- сервер выполнен с возможностью вычисления пройденного пути S' ТС в зависимости от номеров зон Nz1, Nz2, в которых оно было зафиксировано, и длин Lz1, Lz2 упомянутых зон, вычисления времени ΔT проезда контролируемого участка дороги ТС в зависимости от времени проезда Т1, Т2 зон контролируемого участка дороги и вычисления средней скорости ΔV движения ТС на контролируемом участке дороги по формуле ΔV=S'/ΔT.
5. Система по п. 4, отличающаяся тем, что каждое из средств регистрации ТС связано со спутниками глобальной навигационной системы.
6. Система по п. 4, отличающаяся тем, что средства регистрации ТС передают данные на сервер с помощью беспроводных сетей передачи данных.
7. Система по п. 6, отличающаяся тем, что используются сети, выбираемые из группы: GPRS, 3G, 4G, LTE, Wi-Fi, WiMax.
| KR 20080082867 A, 12.09.2008 | |||
| Устройство для очистки труб воздухоподогревателей | 1959 |
|
SU135171A1 |
| EA 201101122 A1, 30.01.2013 | |||
| Фильтр тока | 1958 |
|
SU122194A1 |
| СПОСОБ КОНТРОЛЯ ДВИЖЕНИЯ ТРАНСПОРТНЫХ СРЕДСТВ | 2011 |
|
RU2488171C1 |
| Способ приготовления лака | 1924 |
|
SU2011A1 |

