Изобретение относится к области электротехники, в частности, к области конструирования синхронных безщеточных двигателей, может быть использовано в устройствах, где недопустимы магнитные поля при прецизионных измерениях, например, ЯМР в слабых полях. Устройство позволяет позиционировать в пространстве магниточувствительный датчик между измерениями.
Известен промышленный ЯМР-прибор в земном магнитном поле «Terranova-MRI» фирмы Magritek [1], в котором массивный датчик выполнен в настольном исполнении. Аналогичное исполнение имеет датчик учебного прибора «Earth's Field Nuclear Magnetic Resonance» компании TeachSpin [2], а также ее вариант исполнения датчика с градиентными катушками «Earth's Field Nuclear Magnetic Resonance Gradient/Field Coil System». В обоих приборах необходимо вручную поворачивать датчик вокруг вертикальной оси до ортогонального расположения оси катушки по отношению к магнитному полю Земли с целью получения, максимального отношения сигнала к шуму. Заявленное изобретение способно установить направление датчика ортогонально земному магнитному полю автоматически.
Известен Apparatus for orienting a magnetometer US 4600886 А [3], в котором привод управления поворотом платформы с магнитометром выполнен в виде ременной передачи для увеличения расстояния между магниточувствительным датчиком и устройством, приводящим в движение ременную передачу, чтобы ослабить влияния магнитных частей приводного устройства на магниточувствительный датчик. Заявленное изобретение свободно от данного недостатка, имеет более компактную конструкцию за счет расположение электрического привода поворота платформы в непосредственной близости от магниточувствительного датчика.
Известен Non-magnetic servomechanism magnetometer JP 2008116322 A [4], в котором немагнитный пьезоэлектрический двигатель, приводящий во вращение платформу с магниточувствительным датчиком, находится в непосредственной близости с датчиком. Однако пьезоэлектрические двигатели в заявленном изобретении будут иметь ряд недостатков: при сравнительно большой массе на валу (от 2 кг) придется использовать достаточно большие варианты пьезоэлектрических двигателей, они чувствительны к попаданию в них твердых веществ, например песка, для приведения их в движение необходимы высокие напряжения (свыше 100 В) они сравнительно дороги из-за необходимой точности при их изготовлении. Кроме того, основное их достоинство - очень малый шаг и высокая точность в заявленном изобретении излишни.
Известен Non-magnetic motor used for servo mechanism of optically pumped magnetometer CN 108418371 A [5], в котором немагнитный электродвигатель, приводящий во вращение платформу с магниточувствительным датчиком, находится в непосредственной близости с датчиком. Двигатель изготовлен из немагнитных деталей и имеет схожий принцип действия с двигателем в заявленном изобретении, однако имеет сложную тороидальную конструкцию, которая не имеет фиксацию ротора при выключенном питании двигателя.
Техническим результатом заявленного изобретения является отсутствие постоянных магнитных полей, простота устройства двигателя и фиксация положения ротора при выключенном токе, питающего устройство.
Указанный технический результат достигается решением конструктивного исполнения устройства. Такой результат является следствием нескольких факторов. Во-первых, выбор схемы синхронного шагового двигателя, в котором вращающее поле создается последовательной подачей электрического тока на обмотки статора, расположенных радиально под углами, делящими полный оборот ротора на равные части. Во-вторых, использование неферромагнитных материалов в конструкции двигателя позволяет проводить прецизионные измерения магнитных полей при выключенном устройстве. В-третьих, механический тормоз удерживает ротор при выключенном питании.
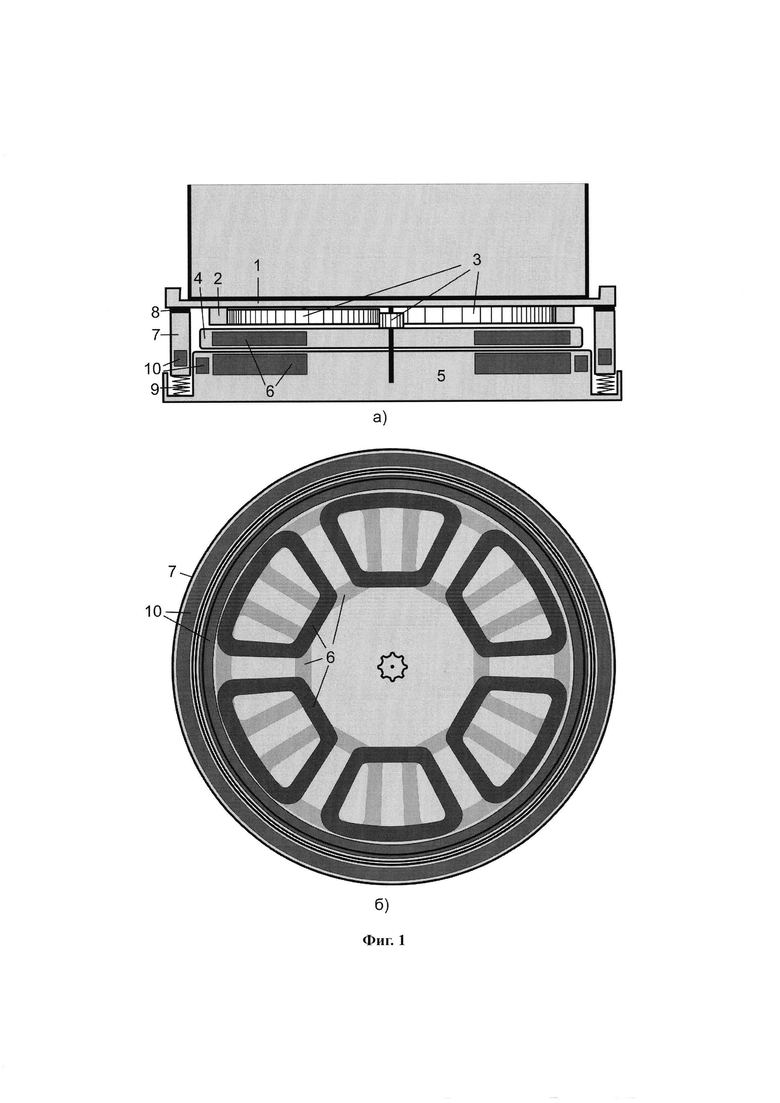
Сущность заявленного изобретения поясняется фиг. 1, где представлена схема устройства и расположение электрических обмоток, при этом на фиг. 1 а) показан фронтальный разрез устройства и на фиг. 1 б) показан вид сверху на обмотки статора и ротора двигателя и тормоза платформы.
На фиг. 1 а) представлено устройство заявленного изобретения, изготовленного из немагнитных деталей, состоящее из горизонтальной платформы (1), на которой располагается ЯМР-датчик или другой магниточувствительный элемент. Платформа закреплена на оси ведомого колеса редуктора. Редуктор (2) состоит из трех колес (шестерен) (3). Ведомое колесо выполнено в виде шестерни с внутренним зацеплением. Таким образом оси ведущего и ведомого колеса совпадают, но имеют разные скорости вращения. Промежуточное колесо служит для связи ведомого и ведущего колес. Ведущее колесо редуктора закреплено на оси электродвигателя, выполненного в виде двух дисков: ротора (4) и статора (5). В обоих дисках выфрезированы или изготовлены иным способом пазы в виде кольцевых секторов вокруг оси вращения. В пазы вложены обмотки, выполненные из медного провода (6). Статор также является опорой для тормоза платформы, который выполнен в виде кольца (7) с обмоткой из медной проволоки (10), вставленного в кольцевой паз статора. Статор также имеет дополнительную обмотку из медной проволоки, опоясываемую кольцевым пазом (10). При подаче напряжения в обмотку тормоза и обмотку, опоясываемую кольцевым пазом тормоза магнитные поля обмоток взаимодействуют так, что они притягиваются друг к другу и кольцо (7) втягивается в паз, преодолевая сопротивление пружины (9), и освобождает платформу (1) для поворота. В месте соприкосновения кольца с платформой наклеивается или наносится фрикционное покрытие (11). При выключение тока в обмотках тормоза пружина прижимает кольцо (7) тормоза к платформе (1), что препятствует ее повороту.
На фиг. 1 б) на виде сверху показано расположение электрических обмоток. В обмотку ротора, состоящую из шести кольцевых секторов, показанных темно-серым цветом, подается постоянный ток. Обмотки ротора соединены так, что вокруг оси вращения образуются чередующиеся магнитные полюса. Обмотки статора представляют собой два слоя обмоток, подобных тому, что и на роторе, но слои сдвинуты на угол половины одной обмотки, второй слой на фиг. 1 б) показан полупрозрачным. Таким образом при чередовании подачи тока в два слоя обмоток статора и перемене направления тока создается пошаговое вращение магнитного поля, которое, взаимодействуя с постоянными магнитными полями ротора, поворачивают последний.
Автоматическое ориентирование осуществляется алгоритмом, который анализирует ЯМР-сигнал или сигнал с другого установленного на платформу магниточувствительного элемента и подает команду на двигатель для поворота в ту или иную сторону, пока не будет достигнут максимальное отношение сигнала к шуму ЯМР-датчика или необходимое значение выходной величины установленного магниточувствительного элемента.
Работа заявленного изобретения осуществляется следующим образом. На обмотки (6) статора (5) и ротора (4) подается напряжение, соответствующее текущему положению ротора
(4), затем подается напряжение на обмотки (10) тормоза, при этом кольцо (7), преодолевая усилие пружины из немагнитного металла (9), освобождает платформу (1), далее ток в обмотках статора (5) меняется таким образом, чтобы повернуть ротор (4) на один или несколько необходимых последовательных шагов, после чего выключается ток в обмотках (10) тормоза и фиксируется положение ротора, и ток во всех обмотках (6) выключается. При этом двигатель обесточен и можно проводить необходимые магниточувствительные измерения.
Заявленное изобретение было апробировано в лабораторных условиях Санкт-Петербургского государственного университета (на физическом факультете на кафедре ядерно-физических методов исследования). Была подтверждена работоспособность заявленного изобретения и достижение указанного технического результата.
Ниже приведен конкретный пример результатов апробации.
Действующий макет привода с шестью катушками на статоре, выполненном в виде диска диаметром 100 мм и ротором в виде такого же диска с 12-ю катушками (все катушки намотаны проводом диаметром 0.4 мм, имеют по 200 витков провода) при подаваемом напряжении 12 В на двигатель и передаточном числе редуктора 120 уверенно, без пропуска шагов, поворачивал платформу с датчиком общим весом 2.5 кг, тормоз фиксировал платформу, выдерживая усилие 750 г на поворот платформы в горизонтальной плоскости на конце плеча рычага 200 мм, связанного с центром поворотной платформы. Двигатель управлялся микроконтроллером по специальному алгоритму, который анализировал ЯМР-сигнал с датчика и подавал команды на двигатель с целью найти такой горизонтальный угол датчика по отношению к магнитному полю Земли, при котором будет регистрироваться максимальный по амплитуде ЯМР-сигнал. Таким образом датчик был сориентирован перпендикулярно магнитному полю Земли, что необходимо для максимального отношения сигнала к шуму при ЯМР-экспериментах в земном поле. Данный процесс занял около 20 циклов «регистрация-поворот», что составило около 2 мин времени.
Список источников информации
1. http://www.magritek.com/wp-content/uploads/2013/12/Magritek-MRI-2011-web.pdf
2. https://www.teachspin.com/earths-field-nmr
3. Apparatus for orienting a magnetometer US 4600886 А
4. Non-magnetic servomechanism magnetometer JP 2008116322 A
5. Non-magnetic motor used for servo mechanism of optically pumped magnetometer CN 108418371 A
| название | год | авторы | номер документа |
|---|---|---|---|
| Асинхронное мотор-колесо с повышенным магнитным сцеплением | 2018 |
|
RU2706669C1 |
| Электромеханическая передача | 1986 |
|
SU1410222A1 |
| Реверсивная электромеханическая передача | 1985 |
|
SU1418864A1 |
| Электромеханическая передача | 1985 |
|
SU1267549A1 |
| ЭЛЕКТРОДВИГАТЕЛЬ | 2020 |
|
RU2726627C1 |
| АСИНХРОННЫЙ ТРЕХФАЗНЫЙ ЭЛЕКТРОДВИГАТЕЛЬ | 2018 |
|
RU2759161C2 |
| Мотор-колесо для летательного аппарата | 2022 |
|
RU2784743C1 |
| БЕСКОЛЛЕКТОРНЫЙ ОДНОФАЗНЫЙ РЕПУЛЬСИОННЫЙ ЭЛЕКТРОДВИГАТЕЛЬ | 2004 |
|
RU2265272C1 |
| ГЕНЕРАТОР ПОСТОЯННОГО ТОКА | 2014 |
|
RU2556642C1 |
| Бесконтактная индукционная муфта-тормоз | 1981 |
|
SU995223A1 |
Изобретение относится к области конструирования приборов, использующих ядерный магнитный резонанс в земном магнитном поле, может быть использовано в устройствах для ориентации магниточувствительных элементов, где недопустимы магнитные поля при прецизионных измерениях. Сущность: устройство выполнено из немагнитных деталей и содержит электродвигатель, ротор которого имеет общую с поворотом датчика ось. Датчик установлен на платформе, которая закреплена на оси ведомого колеса редуктора, ведущее колесо которого закреплено на оси электродвигателя. Электродвигатель выполнен в виде двух дисков, один из которых статор, а второй – ротор. В пазах статора и ротора, выполненных в виде кольцевых секторов, вокруг оси вращения расположены обмотки, выполненные из медного провода. Статор является опорой для тормоза платформы, который выполнен в виде кольца с обмоткой из медной проволоки, вставленного в кольцевой паз статора, имеющего дополнительную обмотку из медной проволоки вокруг паза. Кольцо прижимается к платформе пружинами, упирающимися в дно паза статора. Технический результат: отсутствие постоянных магнитных полей, простота устройства двигателя и фиксация положения ротора при выключенном токе, питающего устройство. 1 ил.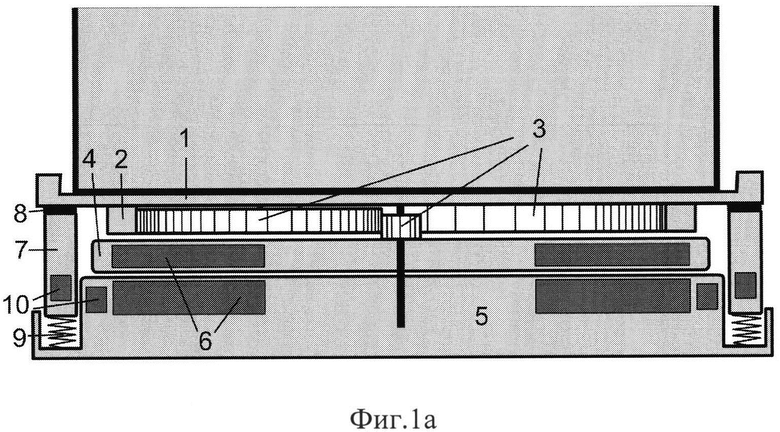
Устройство для ориентации магниточувствительных элементов во внешнем магнитном поле, выполненное из немагнитных деталей, содержащее электродвигатель, ротор которого имеет общую с поворотом датчика ось, отличающееся тем, что датчик установлен на платформе, которая закреплена на оси ведомого колеса редуктора, ведущее колесо которого закреплено на оси электродвигателя, выполненного в виде двух дисков, один из которых статор, а второй - ротор, в пазах статора и ротора, выполненных в виде кольцевых секторов, вокруг оси вращения расположены обмотки, выполненные из медного провода, статор является опорой для тормоза платформы, который выполнен в виде кольца с обмоткой из медной проволоки, вставленного в кольцевой паз статора, имеющего дополнительную обмотку из медной проволоки вокруг паза, кольцо прижимается к платформе пружинами, упирающимися в дно паза статора.
| CN 108418371 B, 14.01.2020 | |||
| US 4600886 А, 15.07.1986 | |||
| JP 2008116322 A, 22.05.2008 | |||
| Устройство для измерения вариаций компонент магнитного поля | 1971 |
|
SU440628A1 |

