ВЗАИМОСВЯЗАННОЕ ИЗОБРЕТЕНИЕ
Представленная заявка на изобретение является взаимосвязанной с заявкой на изобретение СПОСОБ ОЦЕНКИ УРОВНЯ ФУНКЦИОНАЛЬНОЙ СОПРЯЖЕННОСТИ И СИММЕТРИЧНОСТИ МЫШЕЧНЫХ ГРУПП на выдачу патента Российской Федерации №2019107901 поданной 20 марта 2019 года.
ОБЛАСТЬ ТЕХНИКИ
Изобретение относится к области робототехники, а именно к биологической кибернетике, разделу моделирования процессов управления сложными объектами. Технический результат состоит в получении устройства моделирующего нервно-мышечный аппарат, которое может быть использовано при создании роботов, роботизированных и биокибернетических систем.
УРОВЕНЬ ТЕХНИКИ
Устройство и способ полифункционального моделирования нервно-мышечного аппарата относятся к одному из устройств и способов моделирования мышц и нервно-мышечного аппарата.
Существует большое количество способов моделирования мышц и нервно-мышечного аппарата, наиболее распространенные из них: математическое моделирование, компьютерное моделирование на основе специализированных программ, графическое моделирование и физическое моделирование. Высшим пиком моделирования двигательной деятельности является физическое моделирование нервно-мышечного аппарата, применяемое в робототехнике. Все устройства, физически моделирующие мышцы, можно разделить на группы: сервоприводы, актюаторы как аналоги мускулов, пневмомускулы и полимерные мускулы.
Анализ вопроса показал, что идея использования катушек индуктивности или так называемых соленоидов для моделирования мышц не является новой. Известно устройство по описанию к авторскому свидетельству SU №901611 A1, опубл. 30.01.1982 г. «Электрогидравлический привод Козлова А.А.», содержащий камеры с эластичными стенками, заполненными жидким ферромагнетиком, снабженные электрическими обмотками, состоящими из последовательно включенных катушек индуктивности или по описанию изобретения к авторскому свидетельству RU №2372056, опубл. 10.11.2009 г. «Искусственная мышца», содержащая камеры с эластичными стенками, заполненные веществом с ферромагнитными свойствами и имеющие электропроводные обмотки.
Достаточно близким к предложенному изобретению являются многие устройства, моделирующие мышцы, предполагающие подачу электрического тока различной частоты и напряжения от интегральных схем с компонентами к сервомоторам или актюаторам, которые обеспечивают движение частей и кинематических звеньев у робота.
В перечисленных изобретениях имеются недостатки: во-первых они не опираются комплексно на развитие ряда научных отраслей с применением логического объединения фундаментальных данных; во вторых не раскрывают алгоритма изменения и взаимодействия электромагнитных полей между саркомерами и внутри саркомеров, обеспечивающих процесс сложной внутримышечной координации, в основе которого лежат проявления при различных видах работы различных значений силы тяги, скорости сокращения, рекуперации энергии.
Также, имеются попытки воссоздания алгоритмов управления нервно-мышечного аппарата живых существ, такие как, например, программа управления, известная по описанию авторского свидетельства RU №2364385 С2, опубл. 20.08.2009 г., использующая цифровую интерпретацию электромиохронограммы. Но предложенное устройство и программное обеспечение не учитывает, что каждый саркомер не только воспринимает изменения электрического тока - напряжения и частоты передающегося от центральной нервной системы по нервам, но и является «датчиком» повышенной чувствительности изменения уровня сокращения, замкнутым на основных каналах подачи электроэнергии, организованных по принципу обратных связей.
Все известные сложные робототехнические и биокибернетические системы имеют принцип работы, кардинально отличающийся от принципа функционирования нервно-мышечного аппарата живых существ. А именно, как правило, для них устанавливается система координат в пространстве, по которой осуществляется двигательное действие, что приводит к ограничению автономности.
На данном этапе развития биологической кибернетики, а именно раздела, решающего проблему моделирования нервно-мышечного аппарата живых существ, имеются сведения о фундаментальных данных, позволяющие разработать программное обеспечение на основе использования цифровой интерпретации электромиохронограммы.
В литературе полностью отсутствуют сведения о разработке универсальной полифункциональной матрицы, применимой в моделировании нервно-мышечного аппарата, с программным обеспечением, воссоздающим алгоритмы фрагментации электромагнитных полей, происходящих в мышцах при их работе, и алгоритма защиты, позволяющего избежать пробоев в белковых структурах.
Цель изобретения: улучшение характеристик и параметров модели нервно-мышечного аппарата робототехнических и биокибернетических систем.
РАСКРЫТИЕ СУЩНОСТИ ИЗОБРЕТЕНИЯ
ПРОБЛЕМА, РЕШЕНИЕ КОТОРОЙ ДОЛЖНО ОБЕСПЕЧИВАТЬ ИЗОБРЕТЕНИЕ
В предложенном изобретении, когда устройство активировано и выполняется его инициализация, то кинематические параметры в данное время являются известными значениями. После постановки цели двигательного действия, осуществляется поэтапная реализация способа полифункционального моделирования нервно-мышечного аппарата, заключающаяся в воссоздании в устройстве не только внешних биологических обратных связей, но и внутренних. То есть, получаемая информация о расположении кинематических звеньев устройства высчитывается на основании данных, полученных от многочисленных датчиков, встроенных в каркасы, моделирующих мышцы, далее, в одном из блоков устройства подвергается сопоставление полученного цифрового кода с эталонными данными, которые, в свою очередь, оказывают влияние на параметры электрического тока, подающегося к функциональным узлам устройства, обеспечивающим движение по принципу обратных связей.
Однако, чтобы обеспечить изобретение, необходимо решить одну из представленных, либо несколько, проблем или в любом их сочетании:
оптимального соответствия архитектоники функциональных узлов устройства, обеспечивающих движение, архитектонике структур, осуществляющих управление ими, с учетом свойств материалов, применяемых в конструкции;
оптимального соответствия архитектоники устройства полифункционального моделирования нервно-мышечного аппарата способу полифункционального моделирования. Решение данной проблемы поднимает вопросы, связанные с моделированием не только внешних, видимых биологических обратных связей, связанных с изменением положения в пространстве кинематических звеньев, но и внутренних, а именно энергетических характеристик в рамках межсистемных и внутрисистемных взаимодействий;
при поэтапной реализации задач для достижения двигательной цели, установленной оператором, необходимо решение проблемы разработки системы управления, которая могла бы объединить все характеристики в необходимых временных отрезках для симметричной-асимметричной подачи электроэнергии к структурам, прикладывающих силу тяги к кинематическим звеньям устройства в зависимости от поставленной двигательной задачи;
решение проблемы актуальной цифровой базы данных любого двигательного действия с наибольшим количеством двигательных реакций на меняющуюся ситуацию в окружающем пространстве с возможностью постоянного ее расширения;
воссоздания алгоритма фрагментации электромагнитных полей, происходящих в мышцах при их работе и алгоритма защиты, обеспечивающего внутримышечную координацию.
СРЕДСТВА РЕШЕНИЯ ПРОБЛЕМЫ
Согласно одному из объектов изобретения, в нем предложено устройство полифункционального моделирования нервно-мышечного аппарата, состоящее из функциональных узлов, компонентов робототехнической системы, а также, по меньшей мере, моделями мышц, которые прикреплены к подвижно соединенным кинематическим звеньям, блоком управления, датчиками. В полноразмерных моделях мышц имеются датчики, каналы для системы поддержания оптимальной рабочей температуры, секции для закрепления компонентов прикладывающих силу тяги, а также проводки, идущей к датчикам и структурам прикладывающих силу тяги от интегральных схем с компонентами.
Выше упомянутое устройство полифункционального моделирования нервно-мышечного аппарата может быть выполнено таким образом, что в устройстве полифункционального моделирования нервно-мышечного аппарата модели мышц имеют каркасы повышенной подвижности телескопической конструкции.
Выше упомянутое устройство полифункционального моделирования нервно-мышечного аппарата может быть выполнено таким образом, что в устройстве полифункционального моделирования нервно-мышечного аппарата модели мышц имеются каркасы повышенной подвижности, выполненные в виде оболочки, формирующей как внешнюю форму, так и внутреннюю конструкцию, за счет того, что оболочка окружает компоненты, входящие в конструкцию искусственной мышцы.
Выше упомянутое устройство полифункционального моделирования нервно-мышечного аппарата может быть выполнено таким образом, что в устройстве полифункционального моделирования нервно-мышечного аппарата модели мышц укомплектованы соленоидами, имеющими резьбу для движения сердечника.
Выше упомянутое устройство полифункционального моделирования нервно-мышечного аппарата может быть выполнено таким образом, что в устройстве полифункционального моделирования нервно-мышечного аппарата имеются герметичные каналы системы поддержания оптимальной рабочей температуры.
Выше упомянутое устройство полифункционального моделирования нервно-мышечного аппарата может быть выполнено таким образом, что в устройстве полифункционального моделирования нервно-мышечного аппарата имеются каналы для системы поддержания оптимальной рабочей температуры и структуры электромагнитного поля, выполненные в виде зазоров между компонентами.
Выше упомянутое устройство полифункционального моделирования нервно-мышечного аппарата может быть выполнено таким образом, что в устройстве полифункционального моделирования нервно-мышечного аппарата блок управления представлен интегральной схемой с дополнительными релейными компонентами.
Выше упомянутое устройство полифункционального моделирования нервно-мышечного аппарата может быть выполнено таким образом, что в устройстве полифункционального моделирования нервно-мышечного аппарата блок управления представлен специализированным гибридным процессором высокого напряжения, где дополнительные релейные компоненты и микроконтроллеры объединены в пласт.
Выше упомянутое устройство полифункционального моделирования нервно-мышечного аппарата может быть выполнено таким образом, что в устройстве полифункционального моделирования нервно-мышечного аппарата встроен блок передачи данных для осуществления управления устройством оператором.
Выше упомянутое устройство полифункционального моделирования нервно-мышечного аппарата может быть выполнено таким образом, что в своей конструкции имеет компоненты, принимающие цифровую интерпретацию биомеханических характеристик от костюма оператора устройства полифункционального моделирования нервно-мышечного аппарата в материал которого встроены электромиографические электроды и датчики биомеханического контроля согласно комплементарной схеме расположения.
Согласно способу полифункционального моделирования нервно-мышечного аппарата, заключающегося в том, что с помощью устройства полифункционального моделирования нервно-мышечного аппарата моделируются биологические обратные связи и динамические образования функциональных связей, осуществляемые нервно-мышечным аппаратом живых существ при решении любых двигательных задач. А именно, в устройстве полифункционального моделирования нервно-мышечного аппарата, от электрической цепи в которую включены интегральные схемы с их компонентами, подается электрический ток к структурам, прикладывающим силу тяги к кинематическим звеньям устройства, таким образом, что возможно было образовывать рабочие группы из структур, прикладывающих силу тяги любых сочетаний и конфигураций путем реализации алгоритмов матричной структуры с обратной связью на основе цифрового кода, содержащего данные о симметрично-асимметричных изменениях параметров электрического тока в установленных временных отрезках.
В одном из вариантов осуществления изобретения, который обеспечивает решение одной или большего количества обозначенных проблем или уменьшает их, предложен способ полифункционального моделирования нервно-мышечного аппарата, заключающийся в том, что расчеты, производимые программой управления устройством полифункционального моделирования нервно-мышечного аппарата были произведены таким образом, что возможно было возникновение в искусственных мышцах эффекта полифункциональности формирования рабочих групп из компонентов, прикладывающих силу тяги.
В одном из вариантов осуществления изобретения, который обеспечивает решение одной или большего количества обозначенных проблем или уменьшает их, предложен способ полифункционального моделирования нервно-мышечного аппарата, заключающийся в том, что расчеты, производимые программой управления устройством полифункционального моделирования нервно-мышечного аппарата, были произведены таким образом, что возможно было возникновение в искусственных мышцах эффекта фрагментации электромагнитных полей не только между формируемыми рабочими группами из компонентов, прикладывающих силу тяги, но и внутри рабочих групп представленными компонентами, прикладывающими силу тяги.
В одном из вариантов осуществления изобретения, который обеспечивает решение одной или большего количества обозначенных проблем или уменьшает их, предложен способ полифункционального моделирования нервно-мышечного аппарата, заключающийся в том, что при выполнении любого двигательного действия устройством полифункционального моделирования нервно-мышечного аппарата выполняется реализация алгоритма подачи электроэнергии к структурам, прикладывающим силу тяги, на основе анализа осциллограммы, полученной от структур, прикладывающих силу тяги, разделенной на временные отрезки, заключающейся в подсчете коэффициентов функциональной асимметрии:
 ,
,
где KA 1.1 - коэффициент функциональной асимметрии моделей мышц выполняющих роль агонистов;
КА 1.2 - коэффициент функциональной асимметрии моделей мышц выполняющих роль антагонистов;
А - количество изменений на осциллограмме справа(агонист);
В - количество изменений в осциллограмме слева (агонист);
C - количество изменений в осциллограмме справа(антагонист);
D - количество изменений в осциллограмме слева(антагонист),
коэффициентов асимметричности и сопряженности моделей мышц:

 ,
,
где КА 2.1 - коэффициент асимметрии с учетом взаимодействий между моделями мышц в системе агонист-антагонист;
KA 2.2 - коэффициент асимметрии с учетом межгрупповых взаимодействий моделей мышц агониста-антагониста и количеством одновременных изменений во временных отрезках на протяжении установленного измерения;
А - количество изменений в осциллограмме справа (агонист);
В - количество изменений в осциллограмме слева (агонист);
C - количество изменений в осциллограмме справа(антагонист);
D - количество изменений в осциллограмме слева(антагонист);
E - количество одновременных изменений в осциллограмме агониста и антагониста справа;
F - количество одновременных изменений в осциллограмме агониста и антагониста слева, средне статистических значений всех полученных коэффициентов асимметрий, определяющего фактора симметрии-асимметрии каждой модели мышцы в отдельности:
 ,
,
где А - количество изменений в осциллограмме справа, агонист;
Ар - количество изменений в осциллограмме справа, агонист в предшествующем временном отрезке;
В - количество изменений в осциллограмме слева, агонист;
Bp - количество изменений в осциллограмме слева, агонист, в предшествующем временном отрезке;
С - количество изменений в осциллограмме справа, антагонист;
Ср - количество изменений в осциллограмме справа, антагонист, в предшествующем временном отрезке;
D - количество изменений в осциллограмме слева, антагонист;
Dp - количество изменений в осциллограмме слева, антагонист, в предшествующем временном отрезке,
причем полученные значения формируют ядро полифункциональной матрицы, которые сопоставляются с данными характеризующими расположения кинематических звеньев устройства в пространстве и критериями их взаимодействия с окружающими объектами, исключительно направленную на решение двигательной задачи заданной пользователем устройства.
В одном из вариантов осуществления изобретения, который обеспечивает решение одной или большего количества обозначенных проблем или уменьшает их, предложен способ полифункционального моделирования нервно-мышечного аппарата, заключающийся в том, что при выполнении любого двигательного действия, в случае, когда устройство полифункционального моделирования нервно-мышечного аппарата функционирует, используя биомеханические характеристики оператора, выполняется анализ механических характеристик устройства полифункционального моделирования нервно-мышечного аппарата относительно биомеханических характеристик оператора с расчетом коэффициентов пропорциональности размера:
 ×
× ,
,
где KPS - коэффициент пропорциональности размера;
Vm - объем мышцы пользователя;
Vsg - объем смоделированной мышцы оператора;
Vs - объем одной структурной единицы, прикладывающей силу тяги;
Vsa - средний объем саркомера, коэффициентов пропорциональности скоростных характеристик:
 ,
,
где KPW - коэффициентов пропорциональности скоростных характеристик;
Ws - угловая скорость кинематического звена устройства;
Wm - угловая скорость кинематического звена пользователя,
коэффициентов пропорциональности силовых характеристик:
 ,
,
где KPF - коэффициент пропорциональности силовых характеристик;
Fs - сила, проявляемая при работе кинематического звена устройства;
Fm - сила, проявляемая при работе кинематического звена пользователя, коэффициентов пропорциональности, структурной устойчивости:
 ,
,
где KPT - коэффициент пропорциональности структурной устойчивости;
Ts - время от начала работы до температуры, при которой происходят критические изменение физических свойств устройства;
Tm - время от начала работы до невозможности эффективно выполнять двигательные действия,
коэффициентов пропорциональности энергетической устойчивости:
 ,
,
где KPE - коэффициентов пропорциональности энергетической устойчивости;
ΔEs - количество изменений в осциллограмме, полученной от работающей смоделированной мышцы в установленном временном отрезке;
ΔEm - количество изменений в огибающей электромиограмме полученной от работающей мышцы пользователя в установленном временном отрезке;
VBs - время повышенной электрической активности компонентов прикладывающих силу тяги;
VBm - время повышенной электрической активности участка поверхности тела пользователя при работе мышцы,
причем на основе полученных значений коэффициентов пропорциональности производятся подсчеты корреляционных взаимоотношений со значениями ядра полифункциональной матрицы.
ЭФФЕКТЫ ИЗОБРЕТЕНИЯ
Согласно вариантам осуществления изобретения, когда блок управления может осуществлять управление структурами приведения в движение на основе полифункциональной матрицы, в которой была произведена подстановка цифровых параметров таким образом, что возможно осуществления моделирования биологических обратных связей.
Может быть продемонстрирован достаточный эффект в соответствии со способом полифункционального моделирования нервно-мышечного аппарата, когда получаемые биомеханические параметры оператора приобретают цифровую интерпретацию и применяются в программном обеспечении устройства.
Кроме того, согласно вариантам осуществления изобретения, пользователь может осуществлять управление устройством, моделирующим нервно-мышечный аппарат, не использовав биомеханические характеристики оператора, в том случае, когда блок управление имеет доступ к цифровому коду двигательного действия, который был ранее сохранен на носителе информации.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
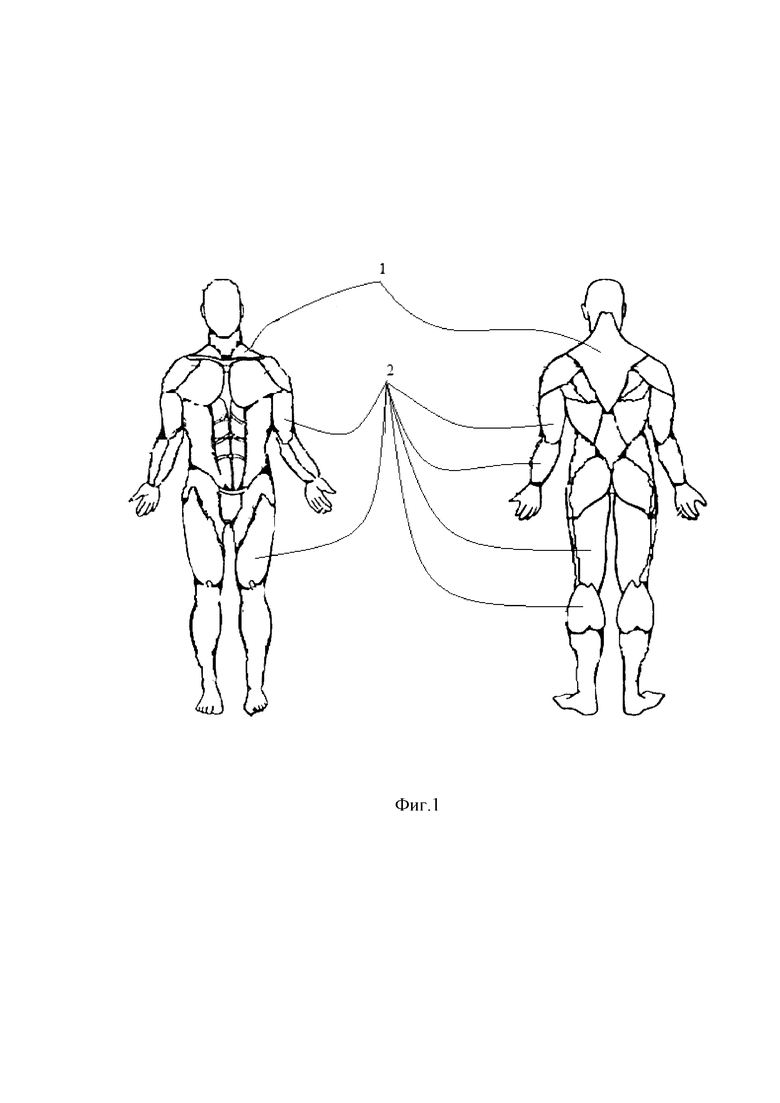
На Фиг. 1 показано устройство полифункционального моделирования нервно-мышечного аппарата, согласно этому варианту изобретения, когда устройство полностью моделирует нервно-мышечный аппарат человека.
На Фиг. 2 на виде спереди, показаны кинематические звенья устройства полифункционального моделирования нервно-мышечного аппарата без моделей мышц, согласно этому варианту изобретения, когда устройство моделирует нервно-мышечный аппарат верхнего плечевого пояса человека.
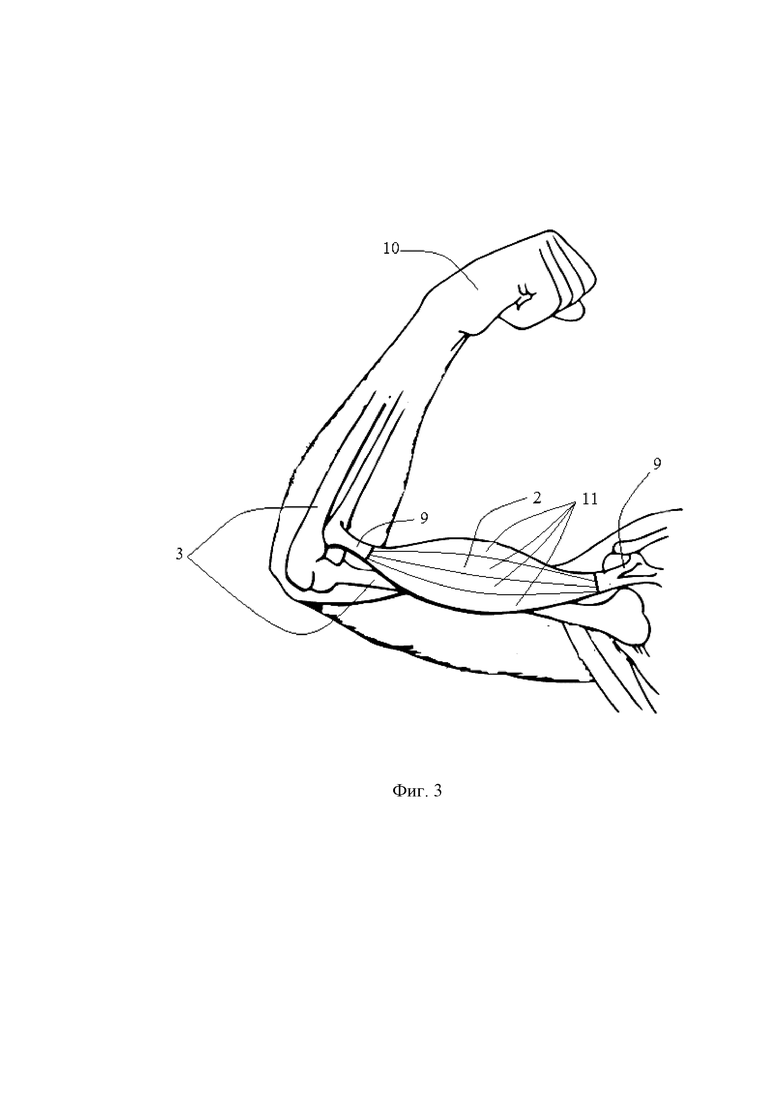
На Фиг. 3 показана полноразмерная модель двуглавой мышцы плеча человека.
На Фиг. 4 изображена схема, одного из вариантов расположения компонентов, прикладывающих силу тяги, отличающееся тем, что модели мышц имеют каркасы повышенной подвижности телескопической конструкции.
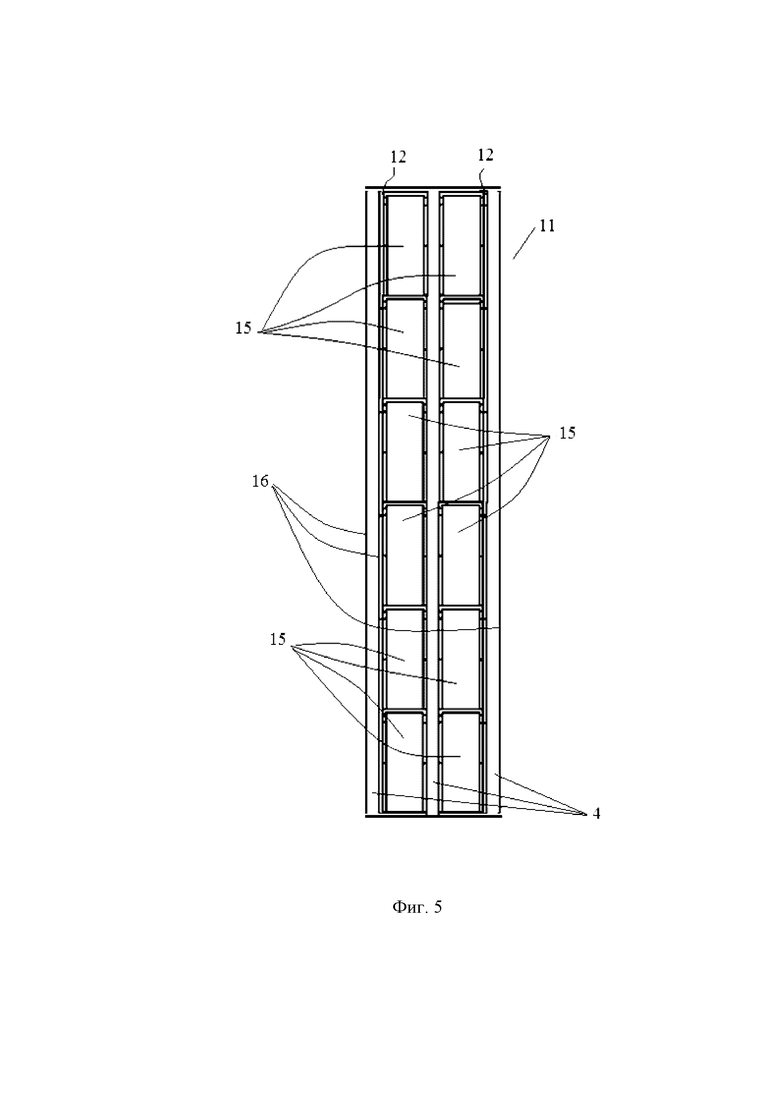
На Фиг. 5 изображена схема, одного из вариантов расположения компонентов, образующих силу тяги, отличающееся тем, что искусственные мышцы имеют каркасы повышенной подвижности, выполненные в виде оболочки.
На Фиг. 6 показан в разрезе соленоид, имеющий в своей конструкции резьбу, по которой движется рабочее тело.
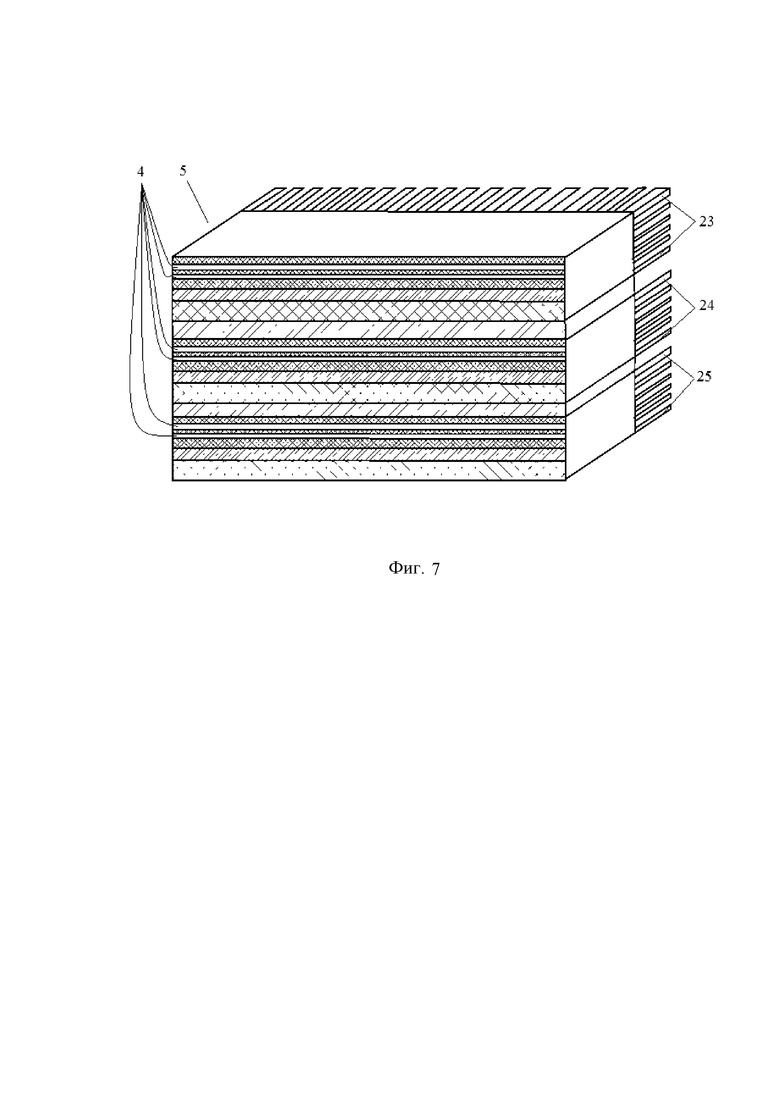
На Фиг. 7 показан блок управления, представленный специальным гибридным процессором высокого напряжения.
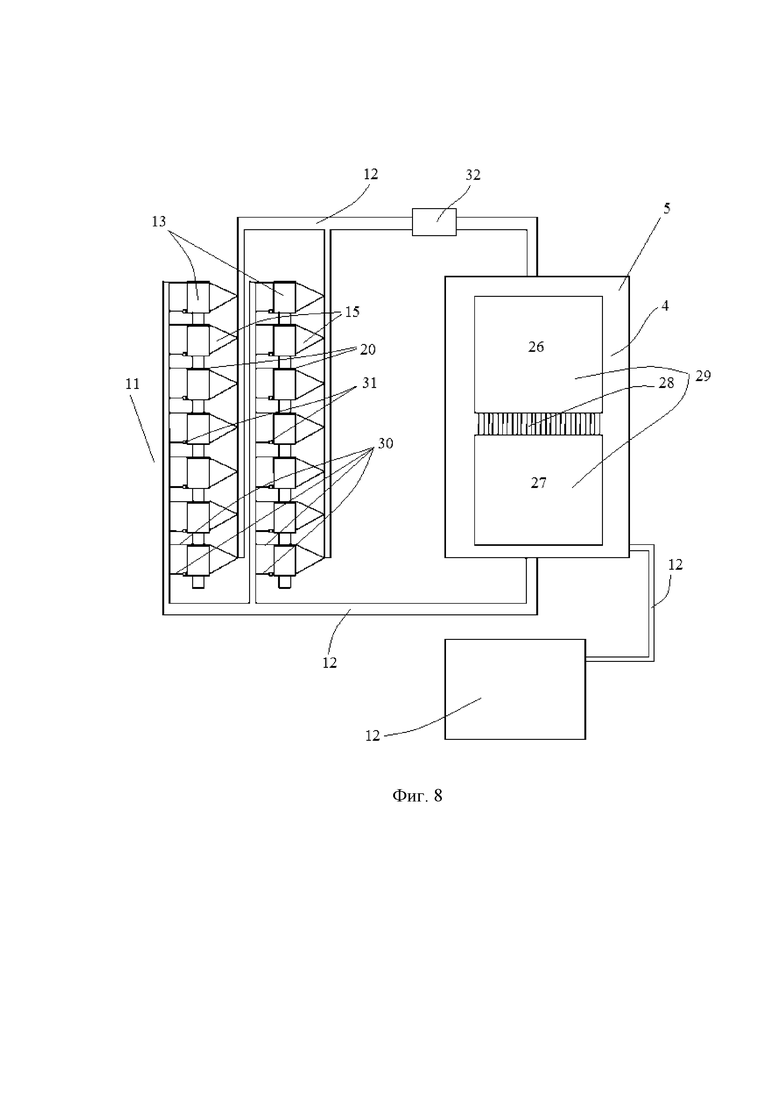
На Фиг. 8 изображена схема подключения простейшей двигательной единицы.
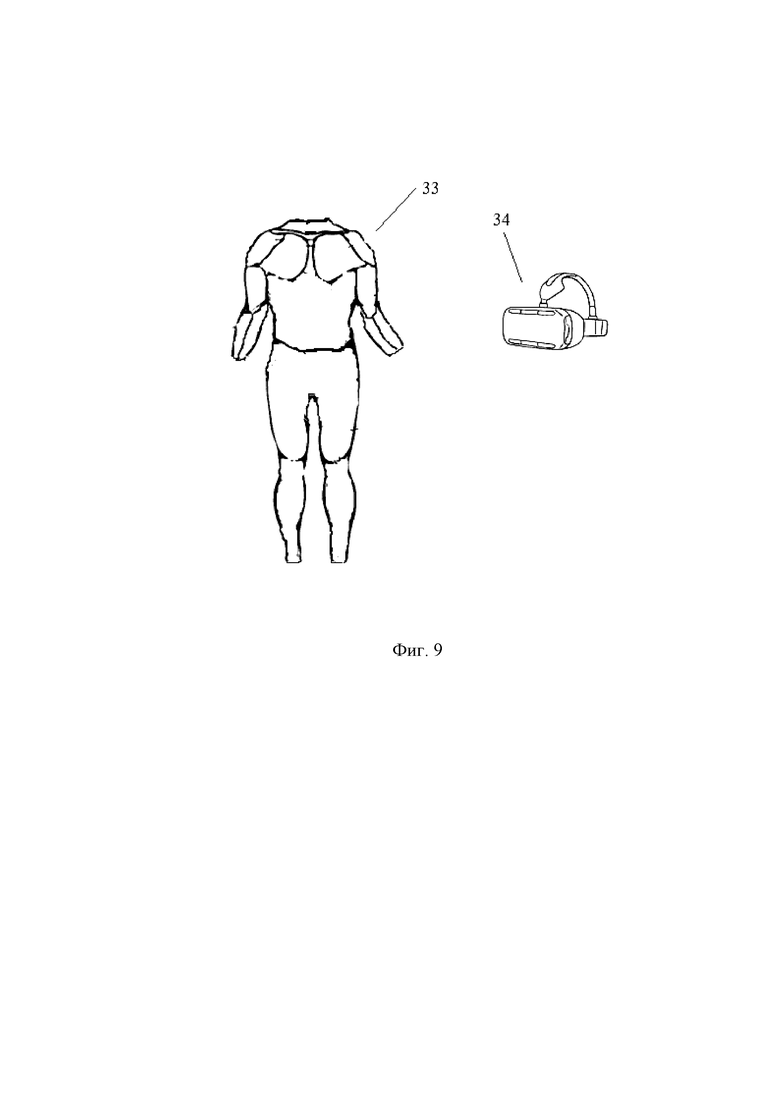
На Фиг. 9 показан рисунок костюма и видеоочков оператора устройства полифункционального моделирования нервно-мышечного аппарата.
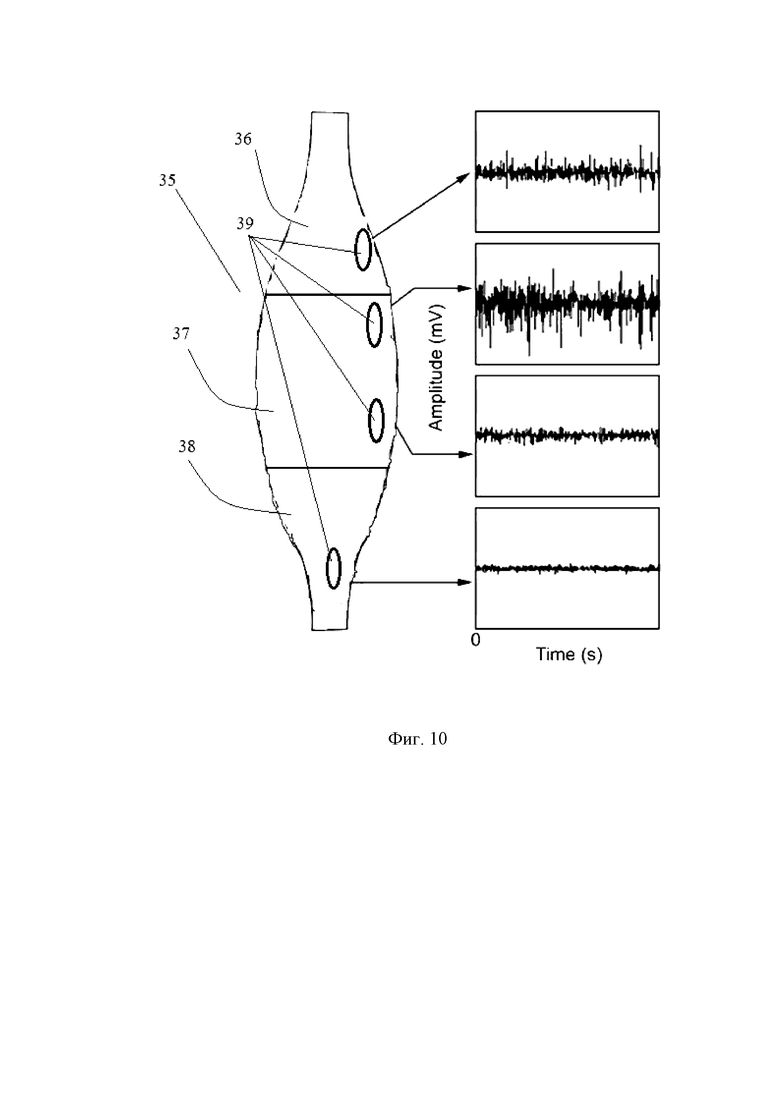
На Фиг. 10 показаны зоны расположения электромиографических электродов, согласно комплементарной схеме расположения.
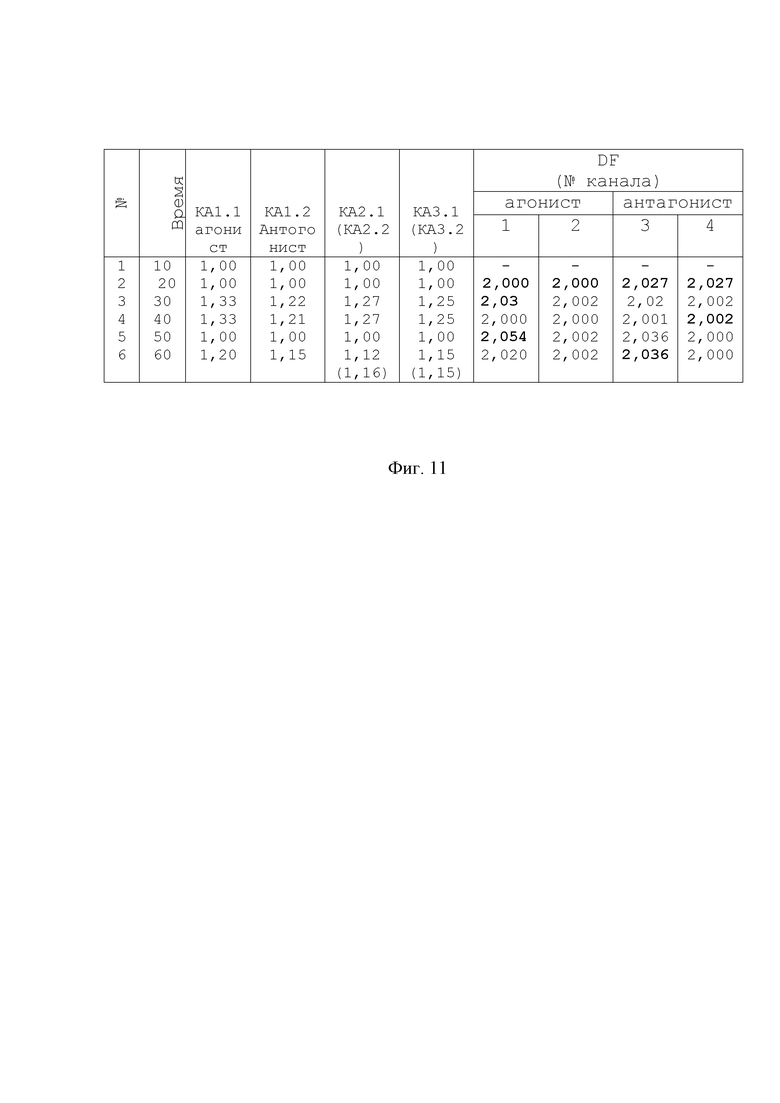
На Фиг. 11 показана таблица с примером кода 3-го и 4-го уровня полифункциональной матрицы.
ОПИСАНИЕ УСЛОВНЫХ ОБОЗНАЧЕНИЙ
1 - устройство полифункционального моделирование нервно-мышечного аппарата
2 - полноразмерная модель мышцы
3 - подвижно соединенное кинематическое звено
4 - канал системы поддержания оптимальной рабочей температуры
5 - блок управления
6 - источник питания
7 - блок передачи данных
8 - стойка
9 - полноразмерная модель сухожилия
10 - полноразмерная модель кисти
11 - двигательная единица, представленная группой компонентов, прикладывающих силу тяги
12 - канал для электропроводки
13 - микросоленоид
14 - зазоры между компонентами искусственной мышцы
15 - секция для закрепления компонентов прикладывающих силу тяги
16 - эластичная оболочка
17 - катушка соленоида
18 - композиционный сердечник
19 - стержень с резьбой
20 - датчик давления
21 - полимерная пружина
22 - сегменты обмотки катушки соленоида
23- разъемы отрицательного напряжения
24- разъемы аналоговых данных и рекуперации энергии
25- разъемы положительного напряжения
26 - пласт микроконтроллеров
27 - пласт релейных компонентов
28 - сверхпроводник
29 - композиционная оболочка
30 - проводка
31 - датчик температуры
32 - датчик осциллографа
33 - костюм оператора
34 - видео очки
35 - мышца
36 - зона головки мышцы
37 - зона брюшка мышцы
38 - зона хвоста мышцы
39 - электромиографический микродатчик встроенный в ткань костюма оператора.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОЦЕНКИ УРОВНЯ ФУНКЦИОНАЛЬНОЙ СОПРЯЖЕННОСТИ И СИММЕТРИЧНОСТИ МЫШЕЧНЫХ ГРУПП | 2019 |
|
RU2713589C1 |
| СПОСОБ ДИАГНОСТИКИ НАРУШЕНИЙ КОЛЕННЫХ РЕФЛЕКСОВ | 1998 |
|
RU2144315C1 |
| СПОСОБ ПОСЛЕПОЛЕТНОЙ РЕАБИЛИТАЦИИ И ВОССТАНОВЛЕНИЯ ФУНКЦИОНАЛЬНОГО СОСТОЯНИЯ МЫШЕЧНОГО АППАРАТА КОЛЕННОГО СУСТАВА КОСМОНАВТОВ С ПОМОЩЬЮ БИОУПРАВЛЯЕМОЙ МЕХАНОТЕРАПИИ | 2023 |
|
RU2816785C1 |
| СПОСОБ ОЦЕНКИ ФУНКЦИОНАЛЬНОГО СОСТОЯНИЯ ЦЕНТРАЛЬНОЙ НЕРВНОЙ СИСТЕМЫ ЧЕЛОВЕКА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2000 |
|
RU2195869C2 |
| СПОСОБ ЛЕЧЕНИЯ ДИСКОГЕННЫХ СКОЛИОЗОВ | 2010 |
|
RU2445131C1 |
| Способ лечения контрактур крупных суставов | 2024 |
|
RU2837137C1 |
| СПОСОБ ЛЕЧЕНИЯ СКОЛИОТИЧЕСКОЙ ДЕФОРМАЦИИ У ДЕТЕЙ | 2008 |
|
RU2404707C2 |
| СПОСОБ ВОССТАНОВИТЕЛЬНОГО ЛЕЧЕНИЯ БОЛЬНЫХ ДОРСОПАТИЯМИ С СОПУТСТВУЮЩИМ ОСТЕОАРТРОЗОМ | 2007 |
|
RU2344847C1 |
| СПОСОБ ВОССТАНОВИТЕЛЬНОГО ЛЕЧЕНИЯ БОЛЬНЫХ ДОРСОПАТИЯМИ | 2006 |
|
RU2391089C2 |
| Модель мышцы | 1983 |
|
SU1164746A1 |



Группа изобретений относится к медицине, а именно к устройствам полифункционального моделирования нервно-мышечного аппарата. Устройство представлено моделями мышц, прикрепленными к подвижно соединенным кинематическим звеньям, блоком управления, датчиками, системой поддержания оптимальной рабочей температуры. В устройстве полифункционального моделирования нервно-мышечного аппарата модели мышц имеют датчики, каналы для системы поддержания оптимальной рабочей температуры, секции для закрепления компонентов, прикладывающих силу тяги, а также проводки, идущей к датчикам и компонентам, прикладывающим силу тяги от интегральных схем и компонентов интегральных схем. Способ полифункционального моделирования нервно-мышечного аппарата заключается в том, что в устройстве полифункционального моделирования нервно-мышечного аппарата моделируются биологические обратные связи и динамические образования функциональных связей осуществляемой нервно-мышечным аппаратом живых существ при решении двигательных задач. Технический результат заключается в создании устройства, моделирующего нервно-мышечный аппарат, которое может быть использовано при создании роботов, роботизированных и биокибернетических систем. 2 н. и 13 з.п. ф-лы, 11 ил.
1. Устройство полифункционального моделирования нервно-мышечного аппарата, представленное функциональными узлами, компонентами робототехнической системы, а также, по меньшей мере, моделями мышц, прикрепленными к подвижно соединенным кинематическим звеньям, блоком управления, датчиками, системой поддержания оптимальной рабочей температуры, отличающееся тем, что в устройстве полифункционального моделирования нервно-мышечного аппарата модели мышц имеют датчики, каналы для системы поддержания оптимальной рабочей температуры, секции для закрепления компонентов, прикладывающих силу тяги, а также проводки, идущей к датчикам и компонентам, прикладывающим силу тяги от интегральных схем и компонентов интегральных схем.
2. Устройство полифункционального моделирования нервно-мышечного аппарата по п. 1, отличающееся тем, что в устройстве полифункционального моделирования нервно-мышечного аппарата модели мышц имеют каркасы телескопической конструкции.
3. Устройство полифункционального моделирования нервно-мышечного аппарата по п. 1, отличающееся тем, что в устройстве полифункционального моделирования нервно-мышечного аппарата модели мышц имеют каркасы, выполненные в виде оболочки, формирующей как внешнюю форму, так и внутреннюю конструкцию, за счет того, что оболочка окружает компоненты, входящие в конструкцию искусственной мышцы.
4. Устройство полифункционального моделирования нервно-мышечного аппарата по п. 1, отличающееся тем, что в устройстве полифункционального моделирования нервно-мышечного аппарата модели мышц укомплектованы соленоидами, имеющими резьбу для движения сердечника.
5. Устройство полифункционального моделирования нервно-мышечного аппарата по п. 1, отличающееся тем, что в устройстве полифункционального моделирования нервно-мышечного аппарата имеются герметичные каналы системы поддержания оптимальной рабочей температуры.
6. Устройство полифункционального моделирования нервно-мышечного аппарата по п. 1, отличающееся тем, что в устройстве полифункционального моделирования нервно-мышечного аппарата имеются каналы для системы поддержания оптимальной рабочей температуры и структуры электромагнитного поля, выполненные в виде зазоров между компонентами.
7. Устройство полифункционального моделирования нервно-мышечного аппарата по п. 1, отличающееся тем, что в устройстве полифункционального моделирования нервно-мышечного аппарата блок управления представлен интегральной схемой с дополнительными релейными компонентами.
8. Устройство полифункционального моделирования нервно-мышечного аппарата по п. 1, отличающееся тем, что в устройстве полифункционального моделирования нервно-мышечного аппарата блок управления представлен гибридным процессором высокого напряжения, где дополнительные релейные компоненты и микроконтроллеры объединены в пласт.
9. Устройство полифункционального моделирования нервно-мышечного аппарата по п. 1, отличающееся тем, что в устройстве полифункционального моделирования нервно-мышечного аппарата встроен блок передачи данных для осуществления управления устройством оператором.
10. Устройство полифункционального моделирования нервно-мышечного аппарата по п. 1, отличающееся тем, что в своей конструкции имеет компоненты, принимающие цифровую интерпретацию биомеханических характеристик от костюма оператора устройства полифункционального моделирования нервно-мышечного аппарата, в материал которого встроены электромиографические электроды и датчики биомеханического контроля согласно комплементарной схеме расположения.
11. Способ полифункционального моделирования нервно-мышечного аппарата, заключающийся в том, что в устройстве полифункционального моделирования нервно-мышечного аппарата моделируются биологические обратные связи и динамические образования функциональных связей, осуществляемые нервно-мышечным аппаратом живых существ при решении двигательных задач, отличающийся тем, что в устройстве полифункционального моделирования нервно-мышечного аппарата от электрической цепи, в которую включены интегральные схемы и компоненты интегральных схем, подается электрический ток к компонентам, прикладывающим силу тяги, таким образом, чтобы возможно было образовывать рабочие группы из компонентов, прикладывающих силу тяги, путем реализации алгоритмов матричной структуры с обратной связью на основе цифрового кода, содержащего данные о симметрично-асимметричных изменениях параметров электрического тока в установленных временных отрезках.
12. Способ полифункционального моделирования нервно-мышечного аппарата по п. 11, отличающийся тем, что расчеты, производимые программой управления устройством полифункционального моделирования нервно-мышечного аппарата, были произведены таким образом, чтобы возможно было возникновение в искусственных мышцах эффекта полифункциональности формирования рабочих групп из компонентов, прикладывающих силу тяги.
13. Способ полифункционального моделирования нервно-мышечного аппарат по п. 11, отличающийся тем, что расчеты, производимые программой управления устройством полифункционального моделирования нервно-мышечного аппарата, были произведены таким образом, чтобы возможно было возникновение в искусственных мышцах эффекта фрагментации электромагнитных полей не только между формируемыми рабочими группами из компонентов, прикладывающих силу тяги, но и внутри рабочих групп из компонентов, прикладывающих силу тяги.
14. Способ полифункционального моделирования нервно-мышечного аппарата по п. 11, отличающийся тем, что при выполнении двигательного действия устройством полифункционального моделирования нервно-мышечного аппарата выполняется реализация алгоритма подачи электроэнергии к компонентам, прикладывающим силу тяги, на основе анализа осциллограммы, разделенной на временные отрезки, заключающейся в подсчете коэффициентов функциональной асимметрии:

 ,
,
где KA 1.1 - коэффициент функциональной асимметрии моделей мышц, выполняющих роль агонистов;
КА 1.2 - коэффициент функциональной асимметрии моделей мышц, выполняющих роль антагонистов;
А - количество изменений на осциллограмме справа(агонист);
В - количество изменений в осциллограмме слева(агонист);
C - количество изменений в осциллограмме справа(антагонист);
D - количество изменений в осциллограмме слева(антагонист), коэффициентов асимметричности и сопряженности моделей мышц:
 ,
,
где КА 2.1 - коэффициент асимметрии с учетом взаимодействий между моделями мышц в системе агонист-антагонист;
KA 2.2 - коэффициент асимметрии с учетом межгрупповых взаимодействий моделей мышц агониста-антагониста и количеством одновременных изменений во временных отрезках на протяжении установленного измерения;
А - количество изменений в осциллограмме справа(агонист);
В - количество изменений в осциллограмме слева(агонист);
C - количество изменений в осциллограмме справа(антагонист);
D - количество изменений в осциллограмме слева(антагонист);
E - количество одновременных изменений в осциллограмме агониста и антагониста справа;
F - количество одновременных изменений в осциллограмме агониста и антагониста слева, среднестатистических значений всех полученных коэффициентов асимметрий, определяющего фактора симметрии-асимметрии каждой модели мышцы в отдельности:

 ,
,
где А - количество изменений в осциллограмме справа, агонист;
Ар - количество изменений в осциллограмме справа, агонист в предшествующем временном отрезке;
В - количество изменений в осциллограмме слева, агонист;
Bp - количество изменений в осциллограмме слева, агонист, в предшествующем временном отрезке;
С - количество изменений в осциллограмме справа, антагонист;
Ср - количество изменений в осциллограмме справа, антагонист, в предшествующем временном отрезке;
D - количество изменений в осциллограмме слева, антагонист;
Dp - количество изменений в осциллограмме слева, антагонист, в предшествующем временном отрезке, причем полученные значения формируют ядро полифункциональной матрицы, которые сопоставляются с данными, характеризующими расположения кинематических звеньев устройства в пространстве и критерии их взаимодействия с окружающими объектами, исключительно направленные на решение двигательной задачи, заданной пользователем устройства.
15. Способ полифункционального моделирования нервно-мышечного аппарата по п.11, отличающийся тем, что при выполнении любого двигательного действия устройством, в случае когда устройство полифункционального моделирования нервно-мышечного аппарата функционирует, используя биомеханические характеристики оператора, выполняется анализ механических характеристик устройства полифункционального моделирования нервно-мышечного аппарата относительно биомеханических характеристик оператора с расчетом коэффициентов пропорциональности размера:
 ×
× ,
,
где KPS - коэффициент пропорциональности размера;
Vm - объем мышцы пользователя;
Vsg - объем смоделированной мышцы оператора;
Vs - объем одной структурной единицы, прикладывающей силу тяги;
Vsa - средний объем саркомера,
коэффициентов пропорциональности скоростных характеристик:
 ,
,
где KPW - коэффициент пропорциональности скоростных характеристик;
Ws - угловая скорость кинематического звена устройства;
Wm - угловая скорость кинематического звена пользователя,
коэффициентов пропорциональности силовых характеристик:
 ,
,
где KPF - коэффициент пропорциональности силовых характеристик;
Fs - сила, проявляемая при работе кинематического звена устройства;
Fm - сила, проявляемая при работе кинематического звена пользователя,
коэффициентов пропорциональности структурной устойчивости:
 ,
,
где KPT - коэффициент пропорциональности структурной устойчивости;
Ts - время от начала работы до температуры, при которой происходят критические изменения физических свойств устройства;
Tm - время от начала работы до невозможности эффективно выполнять двигательные действия,
коэффициентов пропорциональности энергетической устойчивости:
 ,
,
где KPE - коэффициент пропорциональности энергетической устойчивости;
ΔEs - количество изменений в осциллограмме, полученной от работающей смоделированной мышцы в установленном временном отрезке;
ΔEm - количество изменений в огибающей электромиограмме, полученной от работающей мышцы пользователя в установленном временном отрезке;
VBs - время повышенной электрической активности структур, прикладывающих силу тяги;
VBm - время повышенной электрической активности участка поверхности тела пользователя при работе мышцы,
причем на основе полученных значений коэффициентов пропорциональности производятся подсчеты корреляционных взаимоотношений со значениями ядра полифункциональной матрицы.
| Электрогидравлический привод Козлова А.А. | 1980 |
|
SU901611A1 |
| ИСКУССТВЕННАЯ МЫШЦА | 2014 |
|
RU2598763C2 |
| KR 20160117658 A, 11.10.2016 | |||
| US 10653516 B1, 19.05.2020 | |||
| US 9662197 B2, 30.05.2017. | |||

