ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Настоящее изобретение относится к исполнительному устройству, в частности, к исполнительному устройству, содержащему электроактивный материал.
УРОВЕНЬ ТЕХНИКИ, К КОТОРОМУ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Электроактивные материалы (electroactive material - EAM) и, в частности, электроактивные полимеры (electroactive polymer - EAP) являются новым классом материалов в области электрически управляемых материалов. EAP могут работать в качестве датчиков или исполнительных устройств и легко могут быть изготовлены в различных формах, допускающих легкую интеграцию в целый ряд систем.
Были разработаны материалы с характеристиками, такими как механическое напряжение и деформация срабатывания, которые были значительно улучшены за последние десять лет. Технологические риски были снижены до приемлемых для разработки изделий уровней, так что EAP становятся все более интересными с коммерческой и технической точек зрения. Преимущества EAP включают в себя низкую мощность, малый формфактор, гибкость, бесшумную работу, точность, возможность высокого разрешения, малое время срабатывания, и циклическое срабатывание.
Улучшенные характеристики и конкретные преимущества материалов на основе EAP обуславливают их пригодность к новым применениям.
Устройство на основе EAP может быть использовано в любом применении, в котором требуется малая величина перемещения компонента или элемента на основе электрического срабатывания. Подобным образом, эта технология может быть использована для считывания малых перемещений.
Использование EAP обеспечивает функции, которые были невозможны прежде, или обеспечивает значительное преимущество перед обычными решениями датчиков/исполнительных устройств, вследствие комбинации относительно большой деформации и усилия в малом объеме или тонком формфакторе, по сравнению с обычными исполнительными устройствами. EAP также обеспечивают бесшумную работу, точное электронное управление, быстрое срабатывание, и большой диапазон возможных частот срабатывания, например, 0-1 МГц, чаще всего менее 20 кГц.
Устройства, использующие электроактивные полимеры, могут быть подразделены на материалы с полевым управлением и материалы с ионным управлением.
Примеры EAP с полевым управлением включают в себя пьезоэлектрические полимеры, электрострикционные полимеры (такие как релаксорные полимеры на основе PVDF) и диэлектрические эластомеры. Другие примеры включают в себя электрострикционные графт-полимеры, электрострикционную бумагу, электреты, электро-вязкоупругие эластомеры и жидкокристаллические эластомеры.
Примерами EAP с ионным управлением являются сопряженные/проводящие полимеры, ионные полимерно-металлические композиционные материалы (Ionic Polymer Metal Composites - IPMC) и углеродные нанотрубки (carbon nanotube - CNT). Другие примеры включают в себя ионные полимерные гели.
EAP с полевым управлением приводятся в действие электрическим полем посредством прямой электромеханической связи. Им обычно требуются большие напряженности поля (десятки мегавольт на метр), но низкие токи. Слои полимеров обычно являются тонкими, чтобы поддерживать как можно меньшее управляющее напряжение.
Ионные EAP приводятся в действие электрически создаваемым перемещением ионов или растворителя. Им обычно требуются низкие напряжения, но высокие токи. Им требуется жидкая/гелевая электролитическая среда (хотя некоторые системы материалов могут также работать с использованием твердых электролитов).
Оба класса EAP имеют множество членов семейства, каждый из которых имеет свои собственные преимущества и недостатки.
Первым значительным подклассом EAP с полевым управлением являются пьезоэлектрические и электрострикционные полимеры. В то время как электромеханические характеристики традиционных пьезоэлектрических полимеров являются ограниченными, прорыв в улучшении этих характеристик привел к созданию релаксорных полимеров на основе PVDF, которые демонстрируют спонтанную электрическую поляризацию (выравнивание с полевым управлением). Эти материалы могут быть предварительно деформированы для улучшения характеристик в направлении деформации (предварительная деформация приводит к лучшему молекулярному выравниванию). Обычно используют металлические электроды, поскольку деформации обычно осуществляются в умеренном режиме (1-5%). Также могут быть использованы другие типы электродов (например, проводящие полимеры, масла, гели или эластомеры на основе углеродной сажи, и т.д.). Электроды могут быть непрерывными или сегментированными.
Другим интересным подклассом EAP с полевым управлением является подкласс диэлектрических эластомеров. Тонкая пленка этого материала может быть расположена между деформируемыми электродами, в результате чего образуется плоский конденсатор. В случае диэлектрических эластомеров, максвелловское механическое напряжение, создаваемое приложенным электрическим полем, приводит к механическому напряжению на пленке, вызывающему ее сжатие по толщине и расширение по площади. Характеристики деформации обычно увеличиваются посредством предварительного деформирования эластомера (причем требуется каркас для удерживания предварительной деформации). Деформации могут быть значительными (10-300%). Это также ограничивает типы электродов, которые могут быть использованы: для малых и умеренных деформаций могут быть использованы металлические электроды и электроды на основе проводящих полимеров, для режима больших деформаций обычно используют масла, гели или эластомеры на основе углеродной сажи. Электроды могут быть непрерывными или сегментированными.
Первым значительным подклассом ионных EAP являются ионные полимерно-металлические композиционные материалы (Ionic Polymer Metal Composites - IPMC). IPMC состоят из набухающей в растворителе ионообменной полимерной мембраны, ламинированной между двумя тонкими электродами на основе металла или углерода, и требуют использования электролита. Типичными материалами электродов являются Pt, Gd, CNT, CP, Pd. Типичными электролитами являются растворы Li+ и Na+ на водной основе. При приложении поля, катионы обычно перемещаются на сторону катода вместе с водой. Это приводит к реорганизации гидрофильных кластеров и к расширению полимера. Деформация в области катода приводит к механическому напряжению в остальной части полимерной матрицы, которое приводит к изгибу по направлению к аноду. Изменение прикладываемого напряжения на обратное инвертирует изгиб. Общеизвестными полимерными мембранами являются Nafion (товарный знак) и Flemion (товарный знак).
Другим значительным подклассом ионных полимеров являются сопряженные/проводящие полимеры. Исполнительное устройство на основе сопряженного полимера обычно состоит из электролита, расположенного между двумя слоями сопряженного полимера. Электролит используют для изменения степени окисления. При подаче потенциала на полимер через электролит, электроны добавляются к полимеру или удаляются из него, что возбуждает окисление и восстановление. Восстановление приводит к сжатию, окисление приводит к расширению.
В некоторых случаях, добавляют тонкопленочные электроды, когда сам полимер имеет недостаточную удельную электропроводность (в отношении размера). Электролит может быть жидкостью, гелем или твердым материалом (т.е. комплексом полимеров с большим молекулярным весом и солей металлов). Наиболее распространенными сопряженными полимерами являются полипиррол (PPy), полианилин (PANi) и политиофен (PTh).
Исполнительное устройство может быть также образовано из углеродных нанотрубок (Carbon Nano Tube - CNT), суспендированных в электролите. Электролит образует двойной слой с нанотрубками, что обеспечивает возможность инжекции зарядов. Эта инжекция зарядов двойного слоя считается основным механизмом в исполнительных устройствах на основе CNT. CNT действует в качестве электродного конденсатора с зарядом, инжектированным на CNT, который затем уравновешивается электрическим двойным слоем, образуемым посредством перемещения электролита к поверхности CNT. Изменение заряда на атомах углерода приводит к изменениям длины связи С-С. В результате, можно наблюдать расширение и сжатие единственной CNT.
Фиг. 1 и 2 показывают два возможных режима работы устройства на основе EAP.
Устройство содержит слой 8 электроактивного полимера, расположенный между электродами 4, 6, расположенными на противоположных сторонах слоя 8 электроактивного полимера.
Фиг. 1 показывает устройство, которое не закреплено. Чтобы вызвать показанное расширение слоя электроактивного полимера во всех направлениях, используют напряжение.
Фиг. 2 показывает устройство, которое выполнено таким образом, что расширение возникает только в одном направлении. Это устройство поддерживается несущим слоем 10. Чтобы вызвать изгиб или выгиб слоя электроактивного полимера, используют напряжение.
Можно считать, что электроды, слой электроактивного полимера, и несущий слой вместе образуют общую конструкцию на основе электроактивного полимера.
Природа этого перемещения состоит, например, во взаимодействии между активным слоем, который расширяется при срабатывании, и пассивным несущим слоем. Для получения показанного асимметричного изгиба вокруг некоторой оси, может быть применена, например, молекулярная ориентация (растяжение пленки), усиливающая перемещение в одном направлении.
Расширение в одном направлении может быть результатом асимметрии EAP-полимера, или оно может быть результатом асимметрии свойств несущего слоя, или оно может быть результатом комбинации обоих факторов.
Конструкция на основе электроактивного полимера, описанная выше, может быть использована как для срабатывания, так и для считывания. Наиболее известные механизмы считывания основаны на измерениях усилия и детектировании деформации. Диэлектрические эластомеры, например, могут быть легко растянуты под действием внешней силы. Посредством подачи низкого напряжения на датчик, деформация может быть измерена в зависимости от напряжения (напряжение зависит от площади).
Другой способ считывания с использованием систем с полевым управлением состоит в прямом измерении изменения емкости или в измерении изменений сопротивления электродов в зависимости от деформации.
Датчики на основе пьезоэлектрических и электрострикционных полимеров могут генерировать электрические заряд в ответ на приложенное механическое напряжение (при условии, что степень кристалличности является достаточно высокой для генерирования детектируемого изменения). Сопряженные полимеры могут использовать пьезо-ионный эффект (механическое напряжение приводит к обнаружению ионов). В CNT под действием механического напряжения возникает изменение заряда на поверхности CNT, которое может быть измерено. Также было показано, что сопротивление CNT изменяется в контакте с молекулами газов (например, O2, NO2), что делает CNT полезными в качестве детекторов газов.
Механические исполнительные устройства могут, в общем, характеризоваться в терминах конкретного набора комбинаций механическое напряжение - деформация, которые, согласно их характеристикам срабатывания, они способны реализовывать. Этот диапазон обеспечиваемых комбинаций механическое напряжение - деформация ограничен внутренними свойствами исполнительного устройства, и в результате будут ограничены возможные применения исполнительного устройства.
Для исполнительных устройств на основе электроактивных материалов, было бы желательно расширить диапазон обеспечиваемых комбинаций механическое напряжение - деформация, чтобы расширить посредством этого диапазон потенциальных применений этой технологии. Улучшения в этой области были до сих пор достижимы только посредством разработки сложных составных конструкций исполнительных устройств, образованных из комбинаций множественных исполнительных устройств на основе EAP, соединенных вместе. Такие конструкции являются сложными в изготовлении, имеют большой формфактор, и требуют для управления значительного количества дополнительных управляющих электронных средств. Это само по себе ограничивает диапазон применений для этих решений.
Дополнительно к ограничениям по характеристикам срабатывания, исполнительные устройства на основе EAP предшествующего уровня техники также ограничены в обеспечиваемых характеристиках считывания. Известно, что степень срабатывания исполнительного устройства на основе EAP может быть детектирована посредством наложения низкоамплитудного переменного сигнала считывания на управляющий сигнал исполнительного устройства. Однако характеристики считывания с использованием этих способов являются ограниченными. В частности, отношение сигнал - шум EAP является в некоторой степени ограничивающим, и, следовательно, применения, требующие высокой степени точности в измерениях обратной связи, обычно требуют обеспечения дополнительных датчиков.
Известно, что исполнительное устройство на основе EAP может быть дополнено дополнительным специальным воспринимающим слоем для обеспечения более точных измерений считывания. Однако это увеличивает сложность и формфактор исполнительного устройства и может также приводить к потенциальному ухудшению срока службы исполнительного устройства вследствие отслоения воспринимающего слоя в результате частых циклов срабатывания.
Таким образом, в общем, требуются исполнительные устройства на основе EAM и способы для них, которые способны обеспечить улучшенные характеристики срабатывания и/или способны обеспечить улучшенное считывание обратной связи в отношении степени деформации исполнительного устройства.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
В более широком контексте, в области исполнительных устройств известна возможность встраивания магнитных частиц в пассивную полимерную матрицу для обеспечения устройства, способного деформироваться разными способами для обеспечения эффектов срабатывания. Однако известно, что диапазон перемещений и усилий срабатывания, обеспечиваемый такими устройствами, является ограниченным.
Документ US 2009/0165877 описывает некоторое количество исполнительных устройств для использования в микроструйных системах. В одном наборе вариантов осуществления, исполнительные устройства выполнены с возможностью деформироваться в ответ на приложение электрического поля. Они могут содержать материал на основе электроактивного полимера для обеспечения этого эффекта. В отдельном наборе вариантов осуществления, исполнительные устройства выполнены с возможностью быть чувствительными к приложению магнитного поля. Они могут содержать магнитные частицы для обеспечения этой функциональности.
В области магнитных датчиков также известна возможность использования магнитных частиц, встроенных в матрицу пьезоэлектрического материала, для обеспечения возможности считывания напряженностей магнитного поля. Документ JP 2000038643, например, раскрывает магнитный датчик, изготовленный посредством диспергирования магнитно-чувствительных частиц в пьезоэлектрической матрице. Изменения в магнитной энергии вызывают механический отклик магнитных частиц, которые затем вызывают механические напряжения в пьезоэлектрической матрице. Эти механические напряжения можно детектировать посредством возникающих вследствие этого пьезоэлектрических токов.
Авторы изобретения поняли, что с помощью соответствующих модификаций можно использовать некоторые из этих эффектов в области устройств на основе электроактивных материалов для улучшения функциональности срабатывания или считывания.
Настоящее изобретение определяется формулой изобретения.
Настоящее изобретение относится, в общем, к исполнительным устройствам на основе электроактивных материалов, имеющим встроенные магнитные частицы для обеспечения улучшенных эффектов срабатывания и/или считывания. Признаки любых из описанных ниже примеров могут предпочтительно объединяться.
Согласно примерам, обеспечено исполнительное устройство, содержащее:
исполнительный элемент, содержащий
электроактивный материал, выполненный с возможностью деформироваться в ответ на приложение электрического стимула; и
частицы магнитно-мягкого материала, диспергированные в электроактивном материале;
средство генерирования магнитного поля, выполненное с возможностью генерировать магнитное поле с конфигурируемой структурой напряженности поля для приложения к исполнительному элементу;
средство генерирования электрического стимула; и
контроллер, выполненный с возможностью управлять средством генерирования магнитного поля и средством генерирования электрического стимула в согласованном режиме для реализации посредством этого одной или нескольких структур деформации в исполнительном элементе.
Эти примеры основаны на идее встраивания магнитно-мягких частиц в элемент на основе электроактивного материала для обеспечения посредством этого исполнительного устройства, которое включает в себя свойства как электрической, так и магнитной чувствительности. Эти две функциональности используются в примерах для обеспечения эффектов срабатывания, которые выходят за пределы эффектов срабатывания, достижимых или достигаемых устройствами предшествующего уровня техники, использующими только одну или другую функциональность.
Электроактивный материал (EAM) может быть согласно конкретным примерам электроактивным полимерным материалом (EAP).
Контроллер выполнен с возможностью обеспечивать согласованное управление средством генерирования электрического стимула и средством генерирования магнитного поля для создания посредством этого одной или нескольких форм, конфигураций или действий деформации в исполнительном элементе. Контроллер может быть в примерах выполнен с возможностью обеспечивать согласованное управление упомянутыми двумя средствами для создания посредством этого программы из одной или нескольких форм, конфигураций или действий деформации в исполнительном элементе.
Согласованное управление может включать в себя одновременную активацию упомянутых двух средств и/или может включать в себя последовательную активацию упомянутых двух средств. Контроллер может быть, например, выполнен с возможностью согласно по меньшей мере одному режиму работы активировать магнитное поле и электрическое поле вместе для обеспечения посредством этого в исполнительном элементе составной деформации, имеющей, например, увеличенную величину или протяжение по сравнению с величиной или протяжением, обеспечиваемыми с использованием только электрической или только магнитной стимуляции.
Дополнительно или альтернативно, контроллер может быть выполнен с возможностью согласно по меньшей мере одному режиму работы активировать упомянутые два средства одновременно для обеспечения в исполнительном элементе конкретной формы или структуры деформации, имеющей дополнительную степень сложности или затрудненности по сравнению с формами, которые могут быть достижимыми с использованием только единственного средства стимуляции.
Например, упомянутые два средства могут быть использованы вместе для обеспечения составной формы срабатывания, образованной из основной деформации (такой как, например, однородный изгиб по всему элементу, вызываемый, например, электрической стимуляцией), поверх которой накладывается дополнительная локальная деформация (создаваемая, например, посредством магнитной стимуляции частиц по меньшей мере в одной локальной области исполнительного элемента). Таким образом, примеры способны обеспечить новые эффекты срабатывания, которые выходят за пределы эффектов срабатывания, достижимых ранее.
В качестве дополнительного примера, согласно одному или нескольким примерам, средствами генерирования магнитного поля и электрического поля можно управлять при последовательной структуре срабатывания для обеспечения одной или нескольких форм или эффектов срабатывания. Последовательное управление может быть использовано для обеспечения последовательности разных конкретных форм или конфигураций срабатывания и/или может быть использовано для обеспечения динамических эффектов срабатывания, таких как волнистость или колебательное поведение. Такие последовательности электрической и/или магнитной стимуляции могут образовывать программу структур деформации, которую контроллер выполнен с возможностью создавать.
Комбинация магнитных частиц с материалом на основе EAP, следовательно, эффективно обеспечивает дополнительную степень свободы в управлении деформацией исполнительного элемента. Это может быть предпочтительно использовано для обеспечения более сложных или механически более мощных перемещений и эффектов срабатывания.
Средство генерирования электрического стимула может быть, в качестве примера, набором электродов для приложения электрического поля к по меньшей мере некоторой секции исполнительного элемента. Это средство может альтернативно включать в себя источник тока, электрически соединяемый с исполнительным элементом для обеспечения электрического тока через по меньшей мере некоторую секцию исполнительного элемента.
Средство генерирования магнитного поля может быть, в качестве примера, управляемым магнитом (т.е. электромагнитом). Это средство может дополнительно или альтернативно включать в себя проводящую катушку для обеспечения кругового протекания электрического тока для установления магнитного поля. Это может быть, например, соленоид. В некоторых примерах, катушка может быть намотана вокруг по меньшей мере некоторой секции исполнительного элемента. В альтернативных примерах, катушка может быть расположена смежно с некоторой секцией исполнительного элемента.
Во всех примерах, средство генерирования магнитного поля выполнено с возможностью генерировать поле с конфигурируемой структурой напряженности поля, что в более широком смысле означает магнитное поле, имеющее конфигурируемые параметры векторного поля по всему пространству, продолжающемуся по меньшей мере через некоторую секцию исполнительного элемента. Магнитное векторное поле часто представляют набором силовых линий магнитного поля, которые показывают направленность поля в конкретной области пространства. Силовые линии магнитного поля согласно примерам могут быть конфигурируемыми.
Согласно одному или нескольким примерам, контроллер может быть выполнен с возможностью создавать в исполнительном элементе любые структуры деформации из предопределенного набора структур деформации. Контроллер может, например, иметь память, содержащую программные команды для реализации в исполнительном элементе любых режимов или конфигураций срабатывания из множества разных режимов или конфигураций срабатывания. Эти программные команды могут включать в себя конкретные установочные параметры или комбинации команд для управления средством генерирования электрического стимула и средством генерирования магнитного поля в согласованном режиме. Эти программные команды могут включать в себя команды для управления средством генерирования электрического стимула и средством генерирования магнитного поля таким образом, чтобы они работали вместе или чтобы они работали отдельно, например, последовательно.
Согласно одному или нескольким примерам, контроллер может быть выполнен с возможностью выполнять заданный план управления для управления деформацией исполнительного элемента, причем план управления включает в себя этапы для управления как средством генерирования электрического стимула, так и средством генерирования магнитного поля, и причем, необязательно, упомянутый план управления включает в себя этапы, зависящие от одного или нескольких входных параметров.
Входные параметры могут согласно одному или нескольким примерам включать в себя одну или несколько пользовательских входных команд. Пользовательские входные команды могут быть приняты от одного или нескольких устройств пользовательского интерфейса и могут включать в себя команды, указывающие на конкретные один или несколько режимов управления, которые подлежат выполнению, или указывающие на одну или несколько структур деформации, которые подлежат реализации, или могут быть просто использованы для инициирования активации или деактивации исполнительного устройства (в любом режиме управления из некоторого ряда режимов управления).
Дополнительно или альтернативно, входные параметры могут включать в себя параметры, получаемые или принимаемые от одного или нескольких сенсорных устройств или считывающих элементов. Считывающие элементы могут включать в себя, например, компоненты для определения степени срабатывания, такие как, например, компоненты, которые будут описаны более подробно ниже согласно дополнительным примерам.
Термин «магнитно-мягкий материал» относится, в более широком контексте, к тем магнитным материалам, которые демонстрируют обратимую намагниченность. Они, в общем, имеют свойство становиться намагниченными после приложения магнитного поля, но теряют упомянутую намагниченность после удаления магнитного поля. Это контрастирует с так называемыми магнитно-жесткими материалами, которые демонстрируют длительную или постоянную намагниченность даже в отсутствие приложенного внешнего магнитного поля.
Согласно одному или нескольким конкретным примерам, частицы магнитно-мягкого материала могут содержать по меньшей мере один из: мягкого ферромагнитного материала, парамагнитного материала, и суперпарамагнитного материала.
Согласно одному или нескольким наборам примеров, магнитно-мягкий материал может быть магнитострикционным материалом для реализации сжатия или расширения исполнительного элемента в ответ на приложение магнитного поля средством генерирования магнитного поля.
В конкретных примерах, средство генерирования магнитного поля может быть выполнено с возможностью генерировать магнитное поле с однородной напряженностью поля для приложения к исполнительному элементу. Однородная напряженность поля означает наличие напряженности поля, которая не зависит от положения, и, в частности, которая является одинаковой на всем протяжении тела исполнительного элемента. Однородное магнитное поле может быть иначе известным как гомогенное магнитное поле.
При наличии магнитного поля с однородной напряженностью поля, магнитострикционные частицы не подвергаются воздействию никаких притягивающих или отталкивающих магнитных сил, но они магнитно стимулируются изменяться или деформироваться по форме или размеру. Эта деформация частиц приводит к соответствующей деформации окружающей матрицы электроактивного материала и, таким образом, исполнительного элемента в целом. В макромасштабе эти магнитно создаваемые деформации приводят к расширению или сжатию исполнительного элемента.
В дополнительных конкретных примерах, средство генерирования магнитного поля может быть выполнено с возможностью генерировать магнитное поле с неоднородной напряженностью магнитного поля для приложения к исполнительному элементу. Неоднородная напряженность магнитного поля означает напряженность поля, которая изменяется в зависимости от положения, и, в частности, которая изменяется по телу исполнительного элемента.
Более конкретно, в этом случае, поле может демонстрировать уменьшение напряженности поля в направлении (направлениях) от средства генерирования магнитного поля, например, в зависимости от расстояния от средства генерирования магнитного поля. Неоднородное поле может быть иначе известным как пространственно негомогенное магнитное поле.
При наличии любого магнитного поля (однородного или неоднородного), магнитно-мягкий материал стимулируется демонстрировать намагниченность, параллельную упомянутому приложенному магнитному полю и имеющую одинаковое с ним направление. При наличии неоднородного магнитного поля, в частности, любая намагниченная частица будет подвергаться воздействию результирующей силы в результате дисбаланса сил, действующих на два ее «полюса». В данном случае магнитно-мягких частиц, когда намагниченность каждой частицы параллельна приложенному магнитному полю и сориентирована с ним, каждая из частиц подвергается воздействию результирующей силы в направлении (положительного) градиента поля в местоположении частицы. Когда магнитное поле уменьшается по напряженности в направлениях от средства генерирования магнитного поля (как в настоящем примере), каждая магнитно-мягкая частица подвергается воздействию силы притяжения, действующей по направлению к средству генерирования магнитного поля.
Следовательно, при приложении неоднородного магнитного поля согласно описываемым сейчас примерам, магнитные частицы подвергаются воздействию силы притяжения, действующей по направлению к средству генерирования магнитного поля. Посредством соответствующего управления средством генерирования магнитного поля таким образом, чтобы оно стимулировало магнитные поля с конкретными структурами напряженности поля, могут быть обеспечены конкретные структуры деформации в исполнительном элементе. В частности, исполнительный элемент может быть в примерах выполнен с возможностью изгибаться или искривляться в направлении средства генерирования магнитного поля (в частности, если исполнительный элемент закреплен на каждом конце).
Соответственно, согласно одному или нескольким примерам, контроллер может быть выполнен с возможностью создавать изгиб по меньшей мере в некоторой секции исполнительного элемента в заданном направлении посредством управления средством генерирования магнитного поля таким образом, чтобы оно генерировало магнитное поле с неоднородной напряженностью магнитного поля, имеющего силовые линии магнитного поля, продолжающиеся через исполнительный элемент в направлении, антипараллельном упомянутому заданному направлению изгиба.
Согласно одному или нескольким примерам, магнитные частицы могут быть суспендированы в полимерных каплях в электроактивном материале, причем полимерные капли имеют вязкость, меньшую чем вязкость электроактивного материала. В этом случае, капли следуют за любой электрически создаваемой деформацией исполнительного элемента, но не мигрируют через матрицу EAP, после приложения магнитного поля. Упомянутые два материала могут быть несмешивающимися. Результатом обеспечения в исполнительном элементе таких капель может быть уменьшенное сопротивление деформации матрицы EAP. Это так, поскольку при деформации EAP частицы полимера способны деформироваться, не испытывая значительного сопротивления от окружающего EAP. В этом состоит отличие от системы, в которой магнитные частицы прямо встроены в матрицу EAP. В последнем случае, эти частицы оказывают частичное сопротивление деформации EAP, поскольку молекулы EAP должны мигрировать (сдвигаться) вдоль поверхности этих частиц. Сдвиг относительно капель действительно также происходит, но поскольку вязкость этих капель является значительно меньшей, чем вязкость EAP-полимера, частичное сопротивление деформации является меньшим.
Согласно одному или нескольким наборам примеров, частицы магнитно-мягкого материала могут быть неоднородно диспергированы в исполнительном элементе для обеспечения неоднородных структур деформации.
В частности, частицы могут быть в примерах расположены в исполнительном элементе с некоторым набором пространственно дискретных концентраций. Предпочтительно, в этих случаях электроактивный материал имеет некоторую вязкость, например, для предотвращения миграции частиц через материал после приложения магнитной силы магнитным полем средства генерирования магнитного поля.
Средство генерирования магнитного поля может быть в этих случаях выполнено с возможностью генерировать магнитное поле, имеющее разные напряженности магнитного поля по каждой концентрации из упомянутого набора пространственно дискретных концентраций. Контроллер может быть согласно конкретному режиму управления выполнен с возможностью управлять средством генерирования магнитного поля таким образом, чтобы оно генерировало упомянутое магнитное поле с разными напряженностями магнитного поля. Таким образом, разные локальные секции или области исполнительного элемента могут быть выполнены с возможностью деформироваться в разной степени или с разными структурами или конфигурациями.
Следовательно, в этих примерах достижимы более сложные и затруднительные структуры и действия срабатывания. В частности, когда это локализованное управление деформацией объединяется с электрически стимулируемой деформацией, может быть реализован широкий диапазон возможных структур деформации и перемещений и действий срабатывания. Это, таким образом, значительно расширяет диапазон потенциальных применений обеспечиваемых исполнительных элементов, а также улучшает их характеристики в уже установленных применениях.
Согласно дополнительным примерам, обеспечен способ срабатывания, причем этот способ использует исполнительный элемент, содержащий:
электроактивный материал, выполненный с возможностью деформироваться в ответ на приложение электрического стимула; и
частицы магнитно-мягкого материала, диспергированные в электроактивном материале;
причем способ содержит этапы, на которых:
управляют средством генерирования магнитного поля, выполненным с возможностью генерировать магнитное поле с конфигурируемой структурой напряженности поля, и средством генерирования электрического стимула в согласованном режиме для реализации посредством этого одной или нескольких структур деформации в исполнительном элементе.
Согласно дополнительным примерам, обеспечено исполнительное устройство, содержащее:
исполнительный элемент, содержащий
электроактивный материал, выполненный с возможностью деформироваться в ответ на приложение электрического стимула; и
частицы магнитно-жесткого материала, диспергированные в электроактивном материале и упорядоченные таким образом, что по меньшей мере некоторая секция исполнительного элемента демонстрирует намагниченность в заданном направлении;
средство генерирования магнитного поля, выполненное с возможностью генерировать магнитное поле с конфигурируемой структурой напряженности поля для приложения к по меньшей мере некоторой секции исполнительного элемента;
средство генерирования электрического стимула; и
контроллер, выполненный с возможностью управлять средством генерирования магнитного поля и средством генерирования электрического стимула в согласованном режиме для реализации посредством этого одной или нескольких структур деформации в исполнительном элементе.
Этот набор примеров основан на идее, подобной идее первого набора примеров, описанной выше, а именно, на идее встраивания магнитно-чувствительных частиц в тело элемента на основе электроактивного материала. Описываемые сейчас примеры, однако, используют магнитно-жесткие частицы, а не магнитно-мягкие частицы. Магнитно-жесткие частицы, как объяснено выше, характеризуются тем, что они демонстрируют устойчивую или постоянную намагниченность, которая не зависит от внешнего приложенного магнитного поля. Это обеспечивает широкий диапазон новых возможностей и вариантов для управления деформацией исполнительного элемента для обеспечения новых и интересных структур и эффектов срабатывания.
Как и в описанных выше примерах, согласованное управление может включать в себя одновременную активацию упомянутых двух средств и/или может включать в себя последовательную активацию упомянутых двух средств.
Контроллер может быть в примерах выполнен с возможностью создавать в исполнительном элементе любые структуры деформации из предопределенного набора структур деформации.
Контроллер может быть согласно одному или нескольким наборам примеров выполнен с возможностью выполнять заданный план управления для управления деформацией исполнительного элемента, причем план управления включает в себя этапы для управления как средством генерирования электрического стимула, так и средством генерирования магнитного поля, и, необязательно, причем упомянутый план управления включает в себя этапы, зависящие от одного или нескольких входных параметров. Входные параметры могут быть пользовательскими входными командами.
Согласно одному или нескольким конкретным примерам, частицы магнитно-жесткого материала могут содержать по меньшей мере один из: жесткого ферромагнитного материала; ферримагнитного материала, SmCo, и NdFeB.
Как и в описанных выше примерах, магнитно-жесткий материал может быть магнитострикционным материалом для реализации сжатия или расширения исполнительного элемента в ответ на приложение магнитного поля средством генерирования магнитного поля.
В конкретных примерах, средство генерирования магнитного поля может быть выполнено с возможностью генерировать магнитное поле с однородной или неоднородной напряженностью магнитного поля для приложения к исполнительному элементу, причем эти термины следует понимать так, как определено выше.
При наличии магнитного поля с однородной напряженностью магнитного поля, магнитострикционные частицы не подвергаются воздействию никаких притягивающих или отталкивающих магнитных сил, но они магнитно стимулируются изменяться или деформироваться по форме или размеру. Эта деформация частиц приводит к соответствующей деформации окружающей матрицы электроактивного материала и, таким образом, исполнительного элемента в целом. В макромасштабе эти магнитно создаваемые деформации приводят к расширению или сжатию исполнительного элемента.
При наличии магнитного поля с неоднородной напряженностью магнитного поля (например, с напряженностью, уменьшающейся от средства генерирования магнитного поля), магнитно-жесткий материал подвергается воздействию результирующей силы. Направление этой силы зависит от направления его собственной намагниченности. В частности, если намагниченность магнитно-жестких частиц параллельна приложенному магнитному полю и сориентирована с ним, то тогда магнитные частицы будут подвергаться воздействию силы, действующей в направлении (положительного) градиента напряженности магнитного поля в точке местоположения частицы. Когда напряженность магнитного поля уменьшается в направлениях от средства генерирования магнитного поля, частицы будут в этом случае подвергаться воздействию силы притяжения, действующей по направлению к средству генерирования магнитного поля.
Напротив, если намагниченность магнитно-жестких частиц направлена противоположно общему направлению магнитного поля, то частицы будут подвергаться воздействию магнитной силы, действующей в направлении, противоположном направлению градиента поля в местоположении частицы. Снова, если предположить, что магнитное поле уменьшается в направлениях от средства генерирования магнитного поля, то магнитные частицы в этом случае будут подвергаться воздействию силы отталкивания, отталкивающей их от средства генерирования магнитного поля.
Следовательно, в описываемых сейчас примерах, становится достижимой двунаправленная деформация, поскольку направление отклонения частиц может быть изменено в зависимости от направления приложенного магнитного поля. В частности, разные секции исполнительного элемента могут быть выполнены с возможностью отклоняться либо к средству генерирования магнитного поля, либо от него, в зависимости от направления, в котором силовые линии поля, генерируемые средством генерирования поля, пересекают упомянутые секции.
Более конкретно, контроллер может быть в примерах выполнен с возможностью реализовывать изгиб исполнительного элемента в направлении, антипараллельном направлению намагниченности упомянутой по меньшей мере некоторой секции исполнительного элемента посредством управления средством генерирования магнитного поля таким образом, чтобы оно генерировало магнитное поле с неоднородной напряженностью магнитного поля, имеющее силовые линии магнитного поля, продолжающиеся через исполнительный элемент по существу в том же направлении, что и направление намагниченности.
Дополнительно или альтернативно, контроллер может быть в примерах выполнен с возможностью реализовывать изгиб исполнительного элемента в направлении, параллельном направлению намагниченности упомянутой по меньшей мере некоторой секции исполнительного элемента посредством управления средством генерирования магнитного поля таким образом, чтобы оно генерировало магнитное поле с неоднородной напряженностью магнитного поля, имеющее силовые линии магнитного поля, продолжающиеся через исполнительный элемент в направлении, по существу противоположном направлению намагниченности.
Согласно одному или нескольким примерам, контроллер может быть выполнен с возможностью реализовывать противоположно направленные изгибы по меньшей мере в двух смежных секциях исполнительного элемента посредством управления средством генерирования магнитного поля таким образом, чтобы оно генерировало и прикладывало к исполнительному элементу магнитное поле с неоднородной напряженностью поля, имеющее силовые линии магнитного поля, продолжающиеся по упомянутым смежным секциям в, соответственно, противоположных параллельных направлениях по отношению к направлению намагниченности исполнительного элемента. Согласно этим примерам, смежные секции могут быть выполнены с возможностью демонстрировать отклонение или деформацию (например, изгиб) в разных соответствующих направлениях относительно средства генерирования магнитного поля. Это обеспечивается посредством приложения магнитных полей с разными направленностями к этим соответствующим секциям.
В конкретных примерах, контроллер может быть выполнен с возможностью последовательно активировать магнитные поля для каждой из упомянутых соответствующих смежных секций, для реализации посредством этого волнообразного перемещения в исполнительном элементе. Волнистое или качающееся перемещение является достижимым посредством управления противоположно направленными отклонениями каждой секции из набора смежных секций таким образом, чтобы они активировалось последовательно по очереди, а не все одновременно. Такое волнистое перемещение может быть полезным или предпочтительным для ряда применений, например, для микроструйных систем для толкания или перемещения текучей среды, для обеспечения некоторых механических эффектов «смазки», или для обеспечения толкания или перемещения любого твердого или жидкого тела, контактирующего с волнистой поверхностью исполнительного элемента.
Согласно одному или нескольким наборам примеров, частицы магнитно-жесткого материала могут быть неоднородно диспергированы в исполнительном элементе для обеспечения неоднородных структур деформации.
В частности, частицы могут быть в примерах расположены в исполнительном элементе с некоторым набором пространственно дискретных концентраций.
Средство генерирования магнитного поля может быть в этих случаях выполнено с возможностью генерировать магнитное поле, имеющее разные напряженности магнитного поля по каждой концентрации из упомянутого набора пространственно дискретных концентраций. Контроллер может быть согласно конкретному режиму управления выполнен с возможностью управлять средством генерирования магнитного поля таким образом, чтобы оно генерировало упомянутое магнитное поле с разными напряженностями магнитного поля. Таким образом, разные локальные секции или области исполнительного элемента могут быть выполнены с возможностью деформироваться в разной степени, в разных направлениях, или с разными структурами или конфигурациями.
Следовательно, в этих примерах достижимы более сложные и затруднительные структуры и действия срабатывания. В частности, когда это локализованное управление деформацией объединяется с электрически стимулируемой деформацией, может быть реализован широкий диапазон возможных структур деформации и перемещений срабатывания. Это, таким образом, значительно расширяет диапазон потенциальных применений для обеспечиваемых исполнительных элементов, а также улучшает их характеристики в уже установленных применениях.
Согласно дополнительным примерам, обеспечен способ срабатывания, причем этот способ использует исполнительный элемент, содержащий:
электроактивный материал, выполненный с возможностью деформироваться в ответ на приложение электрического стимула; и
частицы магнитно-жесткого материала, диспергированные в электроактивном материале и упорядоченные таким образом, что по меньшей мере некоторая секция исполнительного элемента демонстрирует намагниченность с заданным направлением,
причем способ содержит этапы, на которых:
управляют средством генерирования магнитного поля, выполненным с возможностью генерировать магнитное поле с конфигурируемой структурой напряженности поля, и средством генерирования электрического стимула в согласованном режиме для реализации посредством этого одной или нескольких структур деформации в исполнительном элементе.
Теперь будут описаны примеры согласно настоящему изобретению.
Примеры согласно одному аспекту настоящего изобретения обеспечивают исполнительное устройство, содержащее:
исполнительный элемент, имеющий некоторую толщину и содержащий
электроактивный материал, выполненный с возможностью деформироваться в ответ на приложение электрического стимула; и
частицы магнитного материала, диспергированные в электроактивном материале;
датчик магнитного поля, выполненный с возможностью детектировать напряженность магнитного поля по меньшей мере в некоторой секции исполнительного элемента или вблизи нее; и
контроллер, выполненный с возможностью определять, на основе выходных данных датчика магнитного поля, указание на изменение формы исполнительного элемента.
Варианты осуществления настоящего изобретения основаны на использовании магнитных частиц, встроенных в элемент на основе электроактивного материала, для обеспечения исполнительных устройств, имеющих некоторые собственные возможности считывания. В частности, варианты осуществления настоящего аспекта изобретения выполнены с возможностью обеспечивать точное указание на некоторый аспект изменения формы исполнительного элемента в режиме реального времени и согласованно с электрической стимуляцией исполнительного элемента. Следовательно, варианты осуществления согласно по меньшей мере некоторым примерам могут обеспечивать обратную связь в режиме реального времени в отношении степени деформации исполнительного элемента (реализуемой в изменении формы этого элемента). Эти возможности считывания могут быть согласно настоящему изобретению предпочтительно встроены в любые из иллюстративных исполнительных устройств (или признаков этих примеров), описанных выше, или объединены с ними, как будет более подробно описано в следующих абзацах.
Контроллер согласно одному или нескольким вариантам осуществления может быть выполнен с возможностью определять указание на изменение толщины исполнительного элемента. Исполнительный элемент может, например, иметь слоистую структуру, содержащую противоположные главные поверхности. В этом случае, толщину следует понимать как размер исполнительного элемента, продолжающийся между упомянутыми двумя главными поверхностями в направлении нормали к каждой из них. Однако, в общем, толщина может относиться к любому произвольному размеру исполнительного элемента, но чаще всего может относиться к меньшему или наименьшему из трех размеров любого исполнительного элемента, обеспечиваемого согласно этому аспекту настоящего изобретения.
Хотя идеи изобретения будут описаны ниже в отношении измерения изменения толщины исполнительного элемента, следует понимать, что в дополнительных примерах эти идеи могут быть легко применены к определению других аспектов изменения формы. Они могут, в качестве неограничивающего примера, включать в себя изменения ширины, высоты, или длины исполнительного элемента, или изменения кривизны или топологии исполнительного элемента. Изменения формы могут в дополнительных примерах включать в себя изменения общего профиля или контура исполнительного элемента. Это может быть обеспечено, например, посредством применения способов и этапов определения, описанных ниже, к множеству разных секций исполнительного элемента, и обработки результатов для определения того, как изменилась общая форма или профиль исполнительного элемента.
Согласно по меньшей мере одному подмножеству вариантов осуществления, контроллер может быть выполнен с возможностью определять, на основе упомянутых выходных данных датчика магнитного поля, изменение напряженности магнитного поля, и определять упомянутое изменение формы исполнительного элемента на основе упомянутого определенного изменения напряженности поля. Это определение может быть основано, например, на известном прямом или непрямом соотношении между этими двумя значениями. Это определение может быть основано на уравнении или выражении, связывающем эти два значения, или может быть в альтернативных примерах основано, например, на использовании справочной таблицы, доступной для контроллера, выполняющего это определение.
Согласно по меньшей мере одному подмножеству вариантов осуществления, контроллер может быть дополнительно выполнен с возможностью создавать деформацию исполнительного элемента посредством приложения электрического стимула к исполнительному элементу и/или приложения магнитного поля к исполнительному элементу. Контроллер согласно этим вариантам осуществления, следовательно, выполнен с возможностью управлять как поведением срабатывания, так и поведением считывания исполнительного устройства. Управление срабатыванием исполнительного элемента может включать в себя магнитно стимулируемую деформацию и/или электрически стимулируемую деформацию. Обратная связь по считыванию может быть в примерах получена контроллером согласованно с управлением деформацией посредством электрического и/или магнитного средства. Более конкретно, контроллер может быть выполнен с возможностью создавать упомянутую деформацию одновременно с определением упомянутого изменения формы исполнительного элемента.
Приложение упомянутого электрического стимула может быть обеспечено посредством дополнительного включения в состав исполнительного устройства средства генерирования электрического стимула. Альтернативно, контроллер может быть оперативно связанным или связываемым с внешним средством генерирования электрического стимула. Этот стимул может быть в примерах электрическим током или может быть в дополнительных примерах электрическим полем.
Согласно одному или нескольким примерам, контроллер может быть выполнен с возможностью управлять формой или степенью деформации, создаваемой в исполнительном элементе в зависимости от упомянутого определенного изменения формы. Собственные возможности считывания вариантов осуществления настоящего изобретения могут быть, следовательно, использованы для прямой передачи данных управления о деформации исполнительного элемента. Например, контроллер может быть выполнен с возможностью по меньшей мере в одном режиме управления продолжать увеличивать прикладываемое напряжение срабатывания до тех пор, пока не будет обеспечена конкретная пороговая толщина (или другой порог по размеру или форме) исполнительного элемента. После этого, контроллер может быть выполнен с возможностью поддерживать напряжение на фиксированном уровне для поддержания достигнутого, таким образом, уровня деформации. Дополнительные примеры будут более подробно описаны в следующих разделах.
Во всех вариантах осуществления настоящего аспекта изобретения, контроллер выполнен с возможностью обеспечивать по меньшей мере указание на изменение формы (например, толщины) исполнительного элемента. Это указание может в некоторых примерах состоять в численном определении некоторого аспекта изменения его формы. Альтернативно, указание может состоять в некоторой другой переменной или параметре, которые могут обеспечить уполномоченную меру или указание на изменение формы.
В некоторых примерах, контроллер может быть выполнен с возможностью идентифицировать, на основе выходных данных датчика магнитного поля, указание на толщину исполнительного элемента. В этих примерах, получают указание на общую или абсолютную толщину исполнительного элемента, а не просто указание на изменение толщины. Это указание может быть численной мерой абсолютной толщины, или оно может альтернативно содержать некоторое другое значение или параметр, которые прямо или непрямо коррелируются с толщиной.
Как отмечено выше, функциональности считывания, обеспечиваемые в вариантах осуществления настоящего изобретения, могут быть предпочтительно скомбинированы или объединены с любыми признаками примеров, описанных выше. В частности, магнитные частицы могут быть магнитно-жесткими частицами или магнитно-мягкими частицами и могут включать в себя магнитострикционные частицы. Теперь будут кратко описаны конкретные варианты осуществления, относящиеся к каждому из этих вариантов.
Согласно по меньшей мере одному подмножеству вариантов осуществления, частицы могут быть частицами магнитно-жесткого материала, причем контроллер выполнен с возможностью определять упомянутое указание на изменение формы исполнительного элемента на основе известного прямого или непрямого соотношения между детектированной напряженностью магнитного поля и формой исполнительного элемента.
В конкретных примерах, контроллер может содержать память и может быть выполнен с возможностью определять упомянутое указание на изменение формы исполнительного элемента посредством предопределенной справочной таблицы, запомненной в упомянутой памяти, причем справочная таблица хранит значения формы (например, толщины) исполнительного элемента, связанные с каждой детектируемой напряженностью магнитного поля.
Альтернативно, контроллер может быть выполнен с возможностью определять изменение детектируемой напряженности магнитного поля в течение заданного интервала времени, и причем справочная таблица хранит значения изменения формы, связанные с некоторым диапазоном возможных детектируемых изменений напряженности магнитного поля. Измеренное изменение напряженности поля может быть затем идентифицировано в справочной таблице, и, таким образом, может быть определено соответствующее изменение формы.
Согласно по меньшей мере одному подмножеству вариантов осуществления, частицы могут быть частицами магнитострикционного магнитного материала, причем контроллер выполнен с возможностью определять упомянутое указание на изменение формы на основе определенного изменения демонстрируемой намагниченности исполнительного элемента. Магнитострикционные частицы обычно характеризуются тем, что они демонстрируют намагниченность (либо постоянную, либо индуцируемую полем), которая изменяется или флуктуирует предсказуемым образом в ответ на приложение сил или деформаций. Посредством контроля изменений демонстрируемой намагниченности с использованием датчика магнитного поля, можно определять указание на изменение формы на основе известных свойств материала исполнительного элемента, например, на основе упругости или, иначе, на основе известного соотношения между изменениями формы исполнительного устройства и создаваемыми механическими напряжениями в теле материала исполнительного элемента.
Соответственно, контроллер выполнен с возможностью определять упомянутое указание на изменение формы на основе известного соотношения между изменением формы исполнительного элемента и изменением намагниченности, создаваемой частицами.
Согласно по меньшей мере одному подмножеству вариантов осуществления, частицы могут быть частицами магнитно-мягкого материала, причем контроллер выполнен с возможностью определять, на основе упомянутых выходных данных датчика магнитного поля, изменение магнитной проницаемости по исполнительному элементу, и определять упомянутое указание на изменение формы исполнительного элемента на основе упомянутого определенного изменения магнитной проницаемости.
В частности, изменение толщины исполнительного элемента может быть согласно одному или нескольким примерам определено на основе соотношения
μ=αNd/<g> (1)
где α является зависящей от материала постоянной, N является числом частиц на единицу площади сечения перпендикулярно толщине, d является размером каждой частицы, параллельным толщине, и <g> является средним взаимным расстоянием между частицами в направлении, параллельном толщине.
Если исполнительный элемент деформируется в направлении, параллельном толщине (например, посредством приложения электрического стимула), то размер взаимного зазора-расстояния <g> изменяется, либо когда частицы прижимаются ближе друг к другу (в случае сжатия), либо когда частицы оттягиваются дальше друг от друга (в случае расширения). Это изменение взаимного зазора-расстояния является измеряемым при обеспечиваемом изменении магнитной проницаемости согласно соотношению (1), приведенному выше.
Конкретные детектируемые изменения магнитной проницаемости могут быть связаны контроллером с соответствующими изменениями формы (например, толщины) исполнительного элемента с использованием справочной таблицы. Альтернативно, они могут быть вычислены контроллером на основе определенных изменений <g> (получаемых на основании измеренных изменений μ) и на основе известного соотношения между <g> и формой исполнительного устройства. Это соотношение может быть экспериментально получаемым соотношением, в частности, для конкретного рассматриваемого исполнительного элемента, или альтернативно может быть теоретически получаемым соотношением.
Согласно одному или нескольким примерам, частицы могут иметь некруглосимметричное сечение. В общем, частицы могут иметь отношение размеров, большее 1, т.е. могут иметь сечение с размером в длину, большим, чем размер в ширину. Эта асимметрия помогает увеличить чувствительность материала к применяемым деформациям в терминах демонстрируемого изменения магнитной проницаемости: меньшее изменение формы приводит к большему отклику в терминах изменения магнитной проницаемости. Это может улучшить точность определяемых изменений формы исполнительного устройства.
Магнитная проницаемость может быть в примерах определена посредством измерения вспомогательного магнитного поля H, создаваемого через исполнительное устройство в ответ на приложение внешнего магнитного поля B. Из отношения B и H прямо следует магнитная проницаемость (т.е. B=μH).
Соответственно, исполнительное устройство может согласно одному или нескольким примерам дополнительно содержать средство генерирования магнитного поля для приложения магнитного поля к исполнительному элементу, причем датчик магнитного поля выполнен с возможностью детектировать напряженность упомянутого магнитного поля, приложенного к исполнительному элементу. Магнитное поле может быть измеряемым, например, магнитной записывающей головкой или датчиком Холла.
В примерах, контроллер может быть оперативно связан с упомянутым средством генерирования магнитного поля и выполнен с возможностью управлять этим средством для приложения упомянутого магнитного поля к исполнительному элементу.
Дополнительно, в примерах этого подмножества вариантов осуществления, электроактивный материал может иметь вязкость, достаточную для предотвращения миграции частиц через материал после приложения магнитной силы магнитного поля средства генерирования магнитного поля. Это обеспечивает согласованное распределение частиц по исполнительному элементу, посредством чего обеспечивается то, что измеряемые изменения магнитной проницаемости могут быть надежно связаны с соответствующим изменением формы исполнительного элемента.
В примерах согласно любому варианту осуществления настоящего аспекта, частицы магнитного материала могут быть неоднородно диспергированы в исполнительном элементе для образования набора пространственно дискретных концентраций частиц, и причем датчик магнитного поля содержит средство для независимого детектирования напряженности магнитного поля по каждой из упомянутых пространственно дискретных концентраций.
Это может обеспечить более тонкие или сложные возможности считывания, при которых изменения формы (например, толщины) разных секций исполнительного элемента могут измеряться независимо. Это может быть, например, конкретно предпочтительным в случаях, когда исполнительный элемент выполнен с возможностью деформироваться согласно неоднородным структурам деформации. В этих случаях, разные секции исполнительного элемента могут быть выполнены с возможностью принимать разные конкретные формы или конфигурации для обеспечения посредством этого более сложной общей структуры деформации. Здесь, считывание изменения толщины, например, по каждой из этих отдельных секций может быть конкретно предпочтительным, например, для обеспечения обратной связи для управления исполнительным элементом.
Дополнительно или альтернативно, такая составная возможность считывания может позволить определять изменения более сложных аспектов формы исполнительного элемента, таких как изменения общего профиля этого элемента. Посредством контроля того, как каждая секция из ряда последовательных секций этого элемента изменяется по ширине или длине, например, можно определить, как изменяется общий контур или профиль этого элемента.
Примеры согласно дополнительному аспекту настоящего изобретения также обеспечивают способ считывания изменения формы исполнительного элемента, причем исполнительный элемент содержит:
электроактивный материал, выполненный с возможностью деформироваться в ответ на приложение электрического стимула, и
частицы магнитного материала, диспергированные в электроактивном материале,
причем способ содержит этапы, на которых:
принимают входные данные от датчика магнитного поля, выполненного с возможностью детектировать напряженность магнитного поля по меньшей мере в некоторой секции исполнительного элемента или вблизи нее, и
определяют, на основе упомянутых входных данных от датчика магнитного поля, указание на изменение формы исполнительного элемента.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Примеры будут теперь подробно описаны со ссылкой на сопутствующие чертежи, в которых:
Фиг. 1 показывает известное устройство на основе электроактивного полимера, которое не закреплено;
Фиг. 2 показывает известное устройство на основе электроактивного полимера, которое ограничено защитным слоем;
Фиг. 3 схематично показывает иллюстративное исполнительное устройство;
Фиг. 4 схематично показывает дополнительное иллюстративное исполнительное устройство;
Фиг. 5 схематично показывает активацию иллюстративного исполнительного устройства фиг. 4 единственным магнитным полем, а не множественными магнитными полями;
Фиг. 6 схематично показывает магнитные частицы, суспендированные в полимерной капле и диспергированные в матрице EAP;
Фиг. 7 схематично показывает секцию иллюстративного исполнительного элемента;
Фиг. 8 схематично показывает иллюстративный исполнительный элемент;
Фиг. 9 схематично показывает дополнительный иллюстративный исполнительный элемент;
Фиг. 10 схематично показывает иллюстративный исполнительный элемент, содержащий магнитострикционные частицы;
Фиг. 11 схематично показывает иллюстративный исполнительный элемент, содержащий магнитно-мягкие частицы;
Фиг. 12 схематично показывает дополнительный иллюстративный исполнительный элемент, содержащий магнитно-мягкие частицы;
Фиг. 13 схематично показывает дополнительный иллюстративный исполнительный элемент, содержащий магнитно-мягкие частицы;
Фиг. 14 схематично показывает иллюстративный исполнительный элемент, содержащий магнитно-жесткие частицы;
Фиг. 15 схематично показывает иллюстративный исполнительный элемент, содержащий магнитно-жесткие частицы; и
Фиг. 16 схематично показывает иллюстративный исполнительный элемент, содержащий магнитострикционные частицы.
ПОДРОБНОЕ ОПИСАНИЕ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ
Настоящее изобретение относится, в общем, к исполнительным устройствам на основе электроактивных материалов, содержащим, например, электроактивный полимер, имеющий встроенные магнитные частицы для обеспечения улучшенных эффектов срабатывания и/или считывания.
Примеры обеспечивают исполнительное устройство, включающее в себя исполнительный элемент на основе EAM, имеющий встроенные магнитно-мягкие частицы, и дополнительно включающее в себя средство для приложения электрического стимула и магнитного поля к исполнительному элементу. Контроллер выполнен с возможностью управлять этими двумя средствами в согласованном режиме для реализации посредством этого одной или нескольких структур деформации в исполнительном элементе.
Примеры обеспечивают исполнительное устройство, включающее в себя исполнительный элемент на основе EAM, имеющий встроенные магнитно-жесткие частицы, и дополнительно включающее в себя средство для приложения электрического стимула и магнитного поля к исполнительному элементу. Контроллер выполнен с возможностью управлять этими двумя средствами в согласованном режиме для реализации посредством этого одной или нескольких структур деформации в исполнительном элементе.
Примеры обеспечивают исполнительное устройство, включающее в себя исполнительный элемент на основе EAM, имеющий встроенные магнитные частицы, и дополнительно включающее в себя датчик магнитного поля для детектирования напряженности магнитного поля в теле исполнительного элемента или вблизи него. Контроллер выполнен с возможностью определять на основе выходных данных датчика магнитного поля указание на изменение формы исполнительного элемента. Контроллер может, в частности, определять изменение толщины исполнительного элемента. В конкретных вариантах осуществления, определенное изменение формы может быть использовано в качестве обратной связи для управления структурой деформации исполнительного элемента.
Фиг. 3 показывает первое иллюстративное исполнительное устройство. Это устройство содержит исполнительный элемент 12, имеющий толщину 16 и содержащий электроактивный полимерный материал, включающий в себя множество диспергированных магнитных частиц. Исполнительный элемент закреплен на каждом конце соответствующим зажимом 18. Эти два зажима преобразуют любое поперечное расширение исполнительного элемента во внеплоскостной изгиб или деформацию.
Вблизи исполнительного элемента 12 расположено средство 22 генерирования магнитного поля, выполненное с возможностью генерировать магнитное поле, имеющее силовые линии магнитного поля, продолжающиеся через тело исполнительного элемента. Средство генерирования магнитного поля может содержать управляемый электромагнит, такой как соленоид, в форме проводящей катушки или обмотки. Средство генерирования магнитного поля может быть альтернативно постоянным магнитом, хотя это может и не быть предпочтительным, поскольку это может потребовать дополнительного средства для физического перемещения магнита к исполнительному элементу и от него для изменения напряженности приложенного магнитного поля (или для полного прекращения приложения поля).
Хотя на фиг. 3 показано, что средство генерирования магнитного поля смещено от исполнительного элемента, в дополнительных примерах средство генерирования магнитного поля может быть расположено в контакте с исполнительным элементом. Согласно одному или нескольким примерам, средство генерирования магнитного поля может содержать катушку, причем катушка намотана вокруг по меньшей мере некоторой секции исполнительного элемента 12.
Исполнительное устройство дополнительно содержит пару электродов 26, прикрепленных к противоположным главным поверхностям исполнительного элемента 12. Электроды могут быть, в качестве примера, ламинированы на каждую из упомянутых главных поверхностей. Альтернативно, также могут быть использованы любые другие фиксирующие или закрепляющие средства. Пригодное средство для присоединения электродов к исполнительному элементу сразу будет очевидным специалисту в данной области техники.
Пара электродов 26 обеспечивает средство генерирования электрического стимула для генерирования и приложения электрического стимула к электроактивному полимерному материалу исполнительного элемента 12 и создания посредством этого деформации исполнительного элемента. В частности, электроды выполнены с возможностью прикладывать электрическое поле по толщине 16 исполнительного элемента. Электроактивный полимерный материал может быть в этом случае электроактивным полимерным материалом с полевым управлением, таким как эластомер или другой пригодный электроактивный полимерный материал с полевым управлением (пригодные примеры описаны выше, а также в нижеследующих абзацах).
Хотя в этом конкретном примере средство генерирования электрического стимула обеспечено в форме пары электродов 26, в дополнительных примерах может быть дополнительно или альтернативно обеспечено средство для подачи электрического тока. Оно может включать в себя, например, пару электрических контактов, электрически связанных с исполнительным элементом в паре соответствующих точек на исполнительном элементе. В этих случаях, электроактивный полимерный материал может быть ионным электроактивным полимером согласно примерам, описанным выше или в нижеследующих абзацах.
Исполнительное устройство дополнительно содержит контроллер 30, оперативно связанный со средством 22 генерирования магнитного поля и парой электродов 26 и выполненный с возможностью управлять упомянутыми двумя средствами в согласованном режиме для реализации программы из одной или нескольких структур деформации в исполнительном элементе 12. В конкретном примере фиг. 3, контроллер электрически связан со средством генерирования магнитного поля и парой электродов и выполнен с возможностью реализовывать управление упомянутыми двумя средствами посредством подачи управляемого электрического тока или напряжения на каждое средство. Посредством управления электрическим током или напряжением, подаваемым на средство генерирования электрического поля, может быть изменена величина приложенного поля. Посредством управления электрическим напряжением, подаваемым на пару электродов 26, можно также управлять напряженностью электрического поля, создаваемого по толщине 16 исполнительного элемента 12.
В дополнительных примерах, средство 22 генерирования магнитного поля может быть дополнительно снабжено отдельным специальным источником питания, и причем контроллер 30 выполнен с возможностью управлять напряженностью или структурой магнитного поля, генерируемого средством 22, посредством передачи управляющих команд посредством оперативной связи.
Согласно описываемому сейчас примеру, магнитные частицы, диспергированные в материале на основе EAP, являются частицами магнитно-мягкого материала. Однако следует понимать, что конструкция исполнительного устройства, показанная на фиг. 3, полностью совместима с исполнительным элементом 12, который содержит магнитно-мягкие частицы или магнитно-жесткие частицы. Конкретные примеры, включающие в себя магнитно-жесткие частицы, будут более подробно описаны в нижеследующих абзацах.
Исполнительный элемент 12 для настоящего примера содержит электроактивный полимерный материал, смешанный с магнитно-мягкими частицами, в результате чего образуется композиционный материал на основе EAP. Магнитно-мягкие частицы следует понимать как частицы, которые являются обратимо намагничиваемыми внешним приложенным магнитным полем, и которые по существу теряют свою намагниченность (почти сразу) после удаления внешнего приложенного магнитного поля. Например, магнитно-мягкие частицы могут быть в конкретных примерах мягкими ферромагнитными частицами, парамагнитными частицами, или суперпарамагнитными частицами.
Фиг. 3(а) показывает исполнительный элемент 12 в нейтральном состоянии несрабатывания.
Фиг. 3(b) показывает исполнительный элемент 12 после приложения магнитного поля 32 к исполнительному элементу средством 22 генерирования магнитного поля. В настоящем примере, средство генерирования магнитного поля выполнено с возможностью прикладывать магнитное поле, имеющее неоднородную напряженность магнитного поля, и, в частности, поле, которое уменьшается по напряженности поля в направлениях от полюса средства генерирования магнитного поля.
Как описано в предыдущем разделе, после приложения любого магнитного поля к (пара) магнитно-мягкому материалу, материал намагничивается и приобретает намагниченность с направлением, сориентированным с направлением приложенного магнитного поля (т.е. с намагниченностью источника 22 поля). В настоящем примере, каждая магнитная частица намагничивается в направлении, сориентированном с приложенным магнитным полем.
Когда приложенное магнитное поле имеет градиент напряженности поля, ориентированный в направлении источника поля, это создает результирующую притягивающую магнитную силу между намагниченным таким образом магнитным материалом и источником приложенного магнитного поля. Это так, поскольку неоднородное поле демонстрирует градиент величины между двумя соответствующими полюсами каждой намагниченной частицы, что приводит к дисбалансу сил притяжения и отталкивания, ощущаемому, соответственно, на каждой частице. Поле на создаваемом «южном» полюсе частицы (вверху с точки зрения фиг. 3) является более сильным, чем на «северном» полюсе. Следовательно, сила притяжения на южном полюсе (притягивающемся к N-полюсу магнитного источника 22) является более сильной, чем сила отталкивания на северном полюсе (отталкивающемся от N-полюса магнитного источника 22). Следовательно, существует результирующее притяжение по направлению к средству 22 генерирования магнитного поля.
Как показано на фиг. 3(b), после приложения магнитного поля 32, создаваемая таким образом сила притяжения между частицами и средством 22 генерирования магнитного поля создает деформацию в исполнительном элементе. В частности, изгиб 36 создается в исполнительном элементе в направлении средства генерирования магнитного поля.
Фиг. 3(с) показывает исполнительный элемент 12 после одновременного приложения магнитного поля и электрического поля по толщине 16 исполнительного элемента. Как показано, комбинация этих двух стимулов создает подобный изгиб исполнительного элемента 12, но с амплитудой или величиной, значительно увеличившейся по сравнению с амплитудой или величиной, создаваемой посредством только магнитной стимуляции. Приложение электрического поля посредством электродов 26 вызывает деформацию электроактивного полимерного материала вне плоскости (из-за зажимов 18). Эта электрически создаваемая деформация объединяется с магнитной деформацией для создания усиленного общего отклика срабатывания.
Некоторое количество разных режимов управления для средства генерирования магнитного поля будет теперь подробно описано со ссылкой на сопутствующие фигуры. Исключительно для ясности, средство генерирования электрического стимула и контроллер не показаны на фигурах, представленных для иллюстрации этих иллюстративных режимов управления. Однако для каждой сопутствующей фигуры и примера следует понимать, что исполнительное устройство, реализующее описанный иллюстративный режим управления, действительно фактически содержит упомянутые отсутствующие элементы, и что контроллер может быть в этих случаях выполнен с возможностью реализовывать одну или несколько структур деформации посредством согласованного управления как средством генерирования электрического стимула, так и средством генерирования магнитного поля. Согласованное управление, как объяснено выше, может включать в себя синхронное и/или последовательное управление.
В примере фиг. 3 обеспечены магнитно-мягкие частицы, диспергированные по существу однородно по всему исполнительному элементу. Однако в дополнительных примерах магнитно-мягкие частицы могут быть распределены неоднородно. Это может позволить в примерах реализовывать неоднородную структуру деформации.
Фиг. 4(а) показывает первый пример. Здесь, магнитные частицы локально сконцентрированы в центральной области 42, причем окружающие области не имеют никаких магнитных частиц. Следовательно, после активации магнитного поля 32 только эта центральная область 42 будет подвергаться воздействию силы притяжения, действующей по направлению к средству 22 генерирования магнитного поля. Это создает более локализованную форму деформации. В частности, создаваемый изгиб или искривление может продолжаться или покрывать только меньшую центральную секцию исполнительного элемента, в отличие от равномерного продолжения по всему исполнительному элементу.
Дополнительно или альтернативно, расположение частиц, показанное на фиг. 4(a), позволяет магнитно создавать изгиб исполнительного элемента даже в случае, когда магнитное поле приложено однородно по всей длине исполнительного элемента 12, в отличие от приложения магнитного поля только к узкой локализованной области, как показано в примерах фиг. 3 и фиг. 4.
Фиг. 4(b) показывает иллюстративный исполнительный элемент, содержащий магнитно-мягкие частицы, сконцентрированные в нецентральной локальной концентрации 42. Как показано, это позволяет стимулировать в исполнительном элементе деформацию, локализованную в самой левой секции исполнительного элемента. В примерах, это может быть объединено, например, с электрической стимуляцией исполнительного элемента с использованием электродов (не показаны) для обеспечения посредством этого составной структуры деформации, образованной из общего по существу однородного изгиба или искривления исполнительного элемента, объединенного с локализованной деформацией 36, магнитно создаваемой, как показано на фиг. 4(b).
Как и в примере фиг. 4(a), хотя на фигуре показано локализованное магнитное поле 32, этот пример полностью совместим с магнитным полем, приложенным однородно по всей длине исполнительного элемента 12.
Фиг. 4(c) показывает дополнительный пример, содержащий магнитные частицы, локально сконцентрированные в трех областях 42, равномерно разнесенных по длине исполнительного элемента 12. Соответствующий зажим 18 обеспечен между каждыми соответствующими локальными областями 42. Как показано, обеспечено средство 22 генерирования магнитного поля, выполненное с возможностью прикладывать магнитное поле, продолжающееся по каждой из соответствующих локальных областей 42. Отдельные локальные магнитные поля 32 могут быть приложены к каждой соответствующей области (как показано на фиг. 4(c)), или равномерно по всей длине исполнительного элемента может быть приложено единственное магнитное поле, покрывающее каждую из соответствующих локальных областей 42. Этот последний альтернативный случай показан в качестве ссылки на фиг. 5. Следует отметить, что в этом случае сходимость может быть значительно меньшей, чем при расположении фиг. 4(c), в котором стимулируется множество локализованных магнитных полей.
После приложения магнитного поля (полей) к трем локальным областям 42, в каждой области создается локально сконцентрированная деформация, в результате чего создается составная структура деформации, состоящая из расположения с тремя выгибами или выступами вдоль длины исполнительного элемента 12. Как и в других примерах, это может быть объединено с электрической стимуляцией материала на основе EAP в исполнительном элементе, для обеспечения посредством этого составной структуры деформации, состоящей из трех локальных выгибов, показанных на фиг. 4(c), наложенных поверх более широкого общего изгиба или искривления исполнительного элемента, продолжающегося равномерно по всей длине исполнительного элемента.
Три упомянутые секции могут магнитно стимулироваться одновременно, отдельно, или последовательно, например, в динамическом режиме. Независимая стимуляция секций может потребовать обеспечения расположения фиг. 4(c), при котором отдельное локальное магнитное поле генерируется для приложения к каждой из трех секций. Эквивалентно, может быть обеспечено единственное средство генерирования магнитного поля, способное генерировать магнитное поле, имеющее напряженность поля, которая изменяется для разных секций исполнительного элемента.
В описанных выше вариантах осуществления предполагается, что матрица электроактивного полимера имеет некоторую вязкость для предотвращения миграции встроенных магнитных частиц через материал матрицы EAP. Вязкость является такой, чтобы магнитная сила, приложенная к частицам средством 22 генерирования магнитного поля, была недостаточной для преодоления вязкостного сопротивления полимерной матрицы. Это обычно имеет место в случае, когда электроактивный полимер имеет относительно высокий модуль упругости (например, модуль Юнга).
Согласно одному или нескольким подмножествам примеров, магнитные частицы могут быть заключены в упруго деформируемые полимерные капли, имеющие вязкость, меньшую, чем вязкость матрицы EAP. Это схематично показано на фиг. 6, которая показывает иллюстративную область исполнительного элемента, в котором обеспечены магнитные частицы, суспендированные в полимерной капле 48, причем капля встроена в окружающую матрицу 46 EAP.
Полимерные капли диспергированы по всей матрице EAP, причем каждая из них содержит набор из одной или нескольких магнитно-жестких частиц. После электрической стимуляции EAP (показано в правой части фиг. 6), полимерные капли следуют за создаваемой деформацией матрицы EAP посредством упругого изменения их формы, но не мигрируют через полимерную матрицу вследствие их относительно низкой вязкости. Эти два полимера, в частности, должны быть несмешивающимися.
Результатом обеспечения магнитных частиц, помещенных в полимерные капли, может быть ослабление сопротивления деформации матрицы EAP. Это так, поскольку после деформации EAP, частицы полимера способны деформироваться, не оказывая значительного сопротивления окружающему EAP. В этом состоит отличие от системы, в которой магнитные частицы прямо встроены в матрицу EAP. В этом случае, частицы действительно оказывают частичное сопротивление деформации EAP, поскольку молекулы EAP должны мигрировать (сдвигаться) вдоль поверхности частиц. Сдвиг относительно капель действительно также происходит, но поскольку вязкость этих капель является значительно меньшей, чем вязкость EAP, частичное сопротивление деформации является меньшим.
Как отмечено выше, широкий диапазон форм и эффектов деформации может быть реализован согласно описываемым сейчас примерам посредством согласованного управления как средством генерирования магнитного поля, так и средством генерирования электрического поля. Это может в примерах включать в себя одновременную активацию упомянутых двух средств для обеспечения составных структур срабатывания. В зависимости от направления приложенного магнитного поля, эффекты электрического поля и эффекты магнитного поля могут применяться в одном и том же направлении или в противоположных направлениях. Когда они применяются в одном и том же направлении, могут быть обеспечены усиленные или увеличенные деформационные отклики. Когда они применяются в противоположных направлениях, могут быть обеспечены двунаправленные структуры срабатывания, причем противоположно направленные изгибы могут быть созданы в разных секциях исполнительного элемента.
Следует отметить, что когда электрическое и магнитное поля прикладываются одновременно, должно быть обеспечено, для создания деформационных откликов с увеличенной амплитудой, чтобы создаваемые магнитные силы были большими, чем электростатические силы, создаваемые заряженными электродами.
Для любого из описанных выше вариантов осуществления, концентрация магнитных частиц и/или концентрация деформируемых полимерных капель могут быть изменены для усиления или ослабления деформационных откликов в исполнительном элементе. Концентрация частиц может быть изменена неоднородно по всему исполнительному элементу для настройки исполнительного устройства таким образом, чтобы оно обеспечивало неоднородные структуры деформационного отклика.
Примеры обеспечивают исполнительные устройства на основе EAP с улучшенными рабочими характеристиками. В частности, описываемые сейчас примеры способны обеспечивать большие усилия срабатывания посредством объединения магнитной и электронно стимулируемой деформации, и/или способны обеспечивать более широкий диапазон разных перемещений срабатывания и форм деформации посредством согласованного использования как электронной, так и магнитной стимуляции. Деформации, создаваемые каждым средством стимуляции, могут накладываться или могут управляться в последовательном режиме.
Посредством соответствующего закрепления, могут быть созданы исполнительные элементы, демонстрирующие разные формы или действия срабатывания в разных областях. Например, может быть создан исполнительный элемент, имеющий три области, как показано на фиг. 4(c). Это может быть продолжено для четырех, пяти или любого произвольного числа областей. Каждой областью можно независимо управлять посредством магнитной стимуляции. Секции могут стимулироваться контроллером вместе или последовательно. Согласно любому описанному примеру, множество средств 22 генерирования магнитного поля может быть обеспечено для обеспечения независимой магнитной стимуляции разных областей или секций исполнительного элемента. Средства генерирования магнитного поля могут быть обеспечены на одной и той же стороне исполнительного элемента 12 или на разных сторонах для обеспечения возможности приложения магнитных полей, имеющих разные направленности. Посредством приложения полей с разными направлениями к разным областям, разные области могут быть выполнены с возможностью деформироваться в разных направлениях. Следовательно, может быть обеспечена двунаправленность.
Теперь, со ссылкой на сопутствующие фигуры, будут описаны дополнительные примеры. Эти примеры обеспечивают исполнительное устройство, включающее в себя исполнительный элемент на основе EAP, имеющий диспергированные магнитно-жесткие частицы, и дополнительно включающее в себя средства для приложения электрического стимула и магнитного поля к исполнительному элементу. Контроллер выполнен с возможностью управлять этими двумя средствами в согласованном режиме для реализации посредством этого программы из одной или нескольких структур деформации в исполнительном элементе.
Как отмечено выше, архитектура устройства, показанная на фиг. 3, может быть соответствующим образом использована в примерах, описанных выше, или согласно описываемому сейчас набору примеров. Хотя конкретный пример, представленный на фиг. 3, содержит магнитно-мягкие частицы, замена этих частиц частицами магнитно-жесткого материала обеспечивает исполнительный элемент, полностью соответствующий настоящему набору примеров. Читатель, таким образом, может сделать ссылку на описание, относящееся к фиг. 3, приведенное выше, для подробного описания конструкции пригодного иллюстративного исполнительного устройства.
Исполнительный элемент согласно описываемым сейчас примерам содержит материал на основе EAP, имеющий диспергированные в нем частицы магнитно-жесткого материала. Для целей настоящего документа, магнитно-жесткий материал следует понимать как материал, который необратимо намагничен (посредством предшествующего приложения внешнего магнитного поля) и который не теряет свою намагниченность после удаления магнитного поля (т.е. он имеет значительную остаточную намагниченность). Магнитно-жесткие частицы могут быть изготовлены, в качестве неограничивающего примера, из ферромагнитных материалов, таких как ферриты, и металлов, таких как SmCo или NdFeB. Другие материалы, пригодные для образования магнитно-жестких частиц, будет сразу очевидны специалисту в данной области техники.
Для обеспечения исполнительного элемента, имеющего диспергированные магнитно-жесткие частицы, магнитно-жесткие частицы могут быть смешаны с электроактивным полимером для образования композиционного материала на основе EAP. Этот композиционный материал может быть использован для образования основного тела исполнительного элемента 12. Для обеспечения однородной и согласованной намагниченности исполнительного элемента, магнитные частицы требуют процесса намагничивания, который обеспечивается посредством приложения сильного магнитного поля для выравнивания магнитных моментов частиц в одном направлении.
Это намагничивание может быть выполнено перед смешиванием частиц. Однако это может привести к группированию частиц вследствие взаимного магнитного притяжения между частицами. Это затрудняет однородное смешивание частиц с материалом на основе EAP. Таким образом, более предпочтительно, чтобы намагничивание частиц выполнялось после смешивания композиционного материала на основе EAP, после чего частицы уже являются зафиксированными в своем положении в EAP. EAP в этом случае должен иметь достаточно высокую вязкость для предотвращения миграции диспергированных магнитных частиц через EAP в ответ на приложение магнитных полей.
Для намагничивания частиц, внешнее магнитное поле прикладывается к исполнительному элементу после смешивания и формования, для выравнивания магнитных моментов в согласованном направлении. Магнитное поле должно иметь напряженность магнитного поля, которая является большей, чем напряженность коэрцитивного поля частиц. В предпочтительных случаях, гомогенное (т.е. с однородной напряженностью поля) магнитное поле используется для намагничивания частиц, поскольку это приводит к более однородной намагниченности по всему исполнительному элементу (поскольку одна и та же напряженность магнитного поля воздействует в каждой точке). Однако в случае, когда прикладываемая напряженность магнитного поля является достаточно высокой для приведения частиц в состояние магнитного насыщения, также может рассматриваться намагничивание с использованием магнитного поля с неоднородной напряженностью поля.
Согласно одному или нескольким примерам, преднамеренно неоднородное магнитное поле может быть приложено к исполнительному элементу при его намагничивании для создания неоднородной структуры намагниченности по этому элементу. Посредством обеспечения неоднородной намагниченности, поведение срабатывания исполнительного элемента может быть изменено. В частности, деформационный отклик конкретной области зависит от величины локальной намагниченности. Посредством изменения степени намагниченности по разным областям, разные области могут откликаться в большей или меньшей степени на приложение однородного магнитного поля. Это может позволить создавать интересные и сложные структуры деформации в ответ на простое приложение однородного поля.
В конкретных примерах, некоторые области могут оставаться ненамагниченными, в то время как другие области однородно намагничиваются. Это может обеспечить шарнирный или составной деформационный отклик, при котором приложенное магнитное поле заставляет намагниченные области деформироваться относительно или вокруг ненамагниченных областей. Области намагниченных частиц могут быть в примерах разделены областями ненамагниченных частиц. Согласно одному или нескольким примерам, разные области исполнительного элемента могут быть обеспечены намагниченностями разной полярности или направленности, причем, например, две смежные области могут быть противоположно намагниченными.
Следует отметить, что основная конструкция иллюстративного исполнительного устройства согласно описываемым сейчас примерам может быть понята из описания фиг. 3, приведенного выше. Однако режимы управления для стимуляции структур деформации в исполнительном элементе (магнитным и электронным средством) могут, в общем, отличаться от режимов управления, используемых в примерах, описанных выше. Теперь будут подробно описаны режимы и средства для управления описываемыми сейчас исполнительными элементами.
Фиг. 7 схематично показывает простое первое средство для магнитного управления иллюстративным исполнительным элементом 12 согласно настоящему набору примеров. Эта фигура показывает малую секцию иллюстративного исполнительного элемента 12, имеющего диспергированные магнитно-жесткие частицы. Эти частицы однородно выровнены для придания исполнительному элементу общей намагниченности в направлении вверх (с точки зрения фиг. 7). Поскольку частицы имеют постоянную остаточную намагниченность, которая не зависит от продолжающегося приложения магнитного поля (в отличие от примеров согласно ранее описанному набору примеров), в описываемых сейчас примерах можно управлять исполнительным элементом таким образом, чтобы он деформировался в разных требуемых направлениях, посредством управления направленностью приложенного магнитного поля.
Это показано в двух конфигурациях, показанных на фиг. 7. В находящейся слева конфигурации, средство 22 генерирования магнитного поля выполнено с возможностью прикладывать магнитное поле (с неоднородной напряженностью поля), имеющее намагниченность, сориентированную с намагниченностью частиц, диспергированных в исполнительном элементе 12. В этом случае, приложенное поле прикладывает к этим частицам силу притяжения (т.е. силу притяжения в направлении средства 22 генерирования магнитного поля). Вязкость электроактивного полимера является, согласно этому примеру, достаточно высокой для предотвращения миграции частиц через полимерную матрицу. Следовательно, сила притяжения, обеспечиваемая приложенным магнитным полем, создает изгиб исполнительного элемента в направлении средства 22 генерирования магнитного поля.
В находящейся справа конфигурации фиг. 7, средство 22 генерирования магнитного поля выполнено с возможностью прикладывать магнитное поле с неоднородной напряженностью поля, имеющее намагниченность, противоположно ориентированную относительно намагниченности частиц в исполнительном элементе 12. В этом случае, приложенное поле прикладывает к частицам силу отталкивания (т.е. силу отталкивания в направлении от средства 22 генерирования магнитного поля). Следовательно, приложение этого магнитного поля приводит к изгибу по меньшей мере показанной секции исполнительного элемента 12 в направлении от средства 22 генерирования магнитного поля.
Таким образом, можно увидеть, что посредством управления направлением приложенного магнитного поля можно управлять направлением изгиба (или другой формы деформации), который создается в одной или нескольких секциях иллюстративного исполнительного элемента 12.
В обоих случаях прикладывается магнитное поле с неоднородной напряженностью поля. Это поле, в частности, уменьшается по напряженности поля в направлениях от средства 22 генерирования магнитного поля. Магнитная сила, прикладываемая к намагниченному телу внешним магнитным полем, может быть, в общем, задана соотношением  (т.е.
(т.е.  ). Когда магнитное поле уменьшается по напряженности поля в зависимости от увеличения расстояния от средства генерирования магнитного поля, это приводит к положительному градиенту
). Когда магнитное поле уменьшается по напряженности поля в зависимости от увеличения расстояния от средства генерирования магнитного поля, это приводит к положительному градиенту  (если предположить однородную намагниченность по исполнительному элементу) в направлениях к средству генерирования магнитного поля. Конкретное направление магнитной силы, прикладываемой к магнитным частицам, будет зависеть в каждом случае от направления приложенного магнитного поля относительно направления намагниченности частиц.
(если предположить однородную намагниченность по исполнительному элементу) в направлениях к средству генерирования магнитного поля. Конкретное направление магнитной силы, прикладываемой к магнитным частицам, будет зависеть в каждом случае от направления приложенного магнитного поля относительно направления намагниченности частиц.
Когда средство генерирования магнитного поля является малым, или по меньшей мере когда средство генерирования магнитного поля способно генерировать поля, которые сдерживаются или ограничиваются их пространственной протяженностью, может быть обеспечена локально сконцентрированная деформация исполнительного элемента.
Эта идея схематично показана на фиг. 8. В этом примере подготовлен исполнительный элемент 12, имеющий однородную намагниченность по всей его длине, причем направления намагниченности в каждой секции 52, 54 исполнительного элемента являются одинаковыми.
На фиг. 8(a), первое средство 22 генерирования магнитного поля прикладывает магнитное поле 32 к первой секции 52 исполнительного элемента 12 в направлении, противоположном намагниченности частиц, и второе средство 22 генерирования магнитного поля прикладывает магнитное поле 32 ко второй секции 54 исполнительного элемента в направлении, сориентированном с намагниченностью частиц. Следовательно, частицы в первой секции 52 подвергаются воздействию силы отталкивания, деформирующей первую секцию от первого средства генерирования поля, и частицы во второй секции 54 подвергаются воздействию силы притяжения, деформирующей вторую секцию по направлению ко второму средству генерирования поля. Это приводит к волнообразной или волнистой структуре деформации в исполнительном элементе.
Фиг. 8(b) показывает подобную схему управления, в которой направленности двух магнитных полей обращены таким образом, что первая секция 52 деформирована вниз, и вторая секция 54 деформирована вверх.
Посредством повторяющегося переключения направленностей этих двух средств 22 генерирования магнитного поля в зависимости от времени, может быть обеспечен динамический эффект волнообразной или качающейся деформации.
Дополнительно к изменению направленностей двух магнитных полей, также могут изменяться напряженности этих двух полей, либо в зависимости от времени, либо статически, для обеспечения разных степеней деформации в каждой из двух смежных секций. В результате, может быть обеспечен почти неограниченный диапазон разных двунаправленных структур деформации.
Дополнительно, хотя на фиг. 8 показаны только две секции, специалист в данной области техники легко поймет, что эта идея может быть продолжена на исполнительный элемент, содержащий любое число разных секций, каждая из которых снабжена независимо управляемым магнитным полем. Это может быть обеспечено либо посредством обеспечения независимых средств генерирования магнитного поля для каждой секции, либо посредством обеспечения средства генерирования магнитного поля, способного генерировать поле, имеющее разные напряженности в разных поперечных местоположениях.
При продолжении на большое число независимо управляемых секций, например, 10 или более, можно генерировать структуру бегущей волны вдоль исполнительного элемента посредством последовательной активации магнитных полей для каждой последовательной секции. Такая бегущая волна может быть предпочтительно использована, например, для создания потока текучей среды, например, поверх исполнительного элемента. Это может быть, например, использовано в качестве насоса. Режимы волнистой деформации этого типа являются особенно полезными, например, в микроструйных системах для толкания или перемещения текучей среды.
Фиг. 9 показывает вариант на основе иллюстративного режима управления фиг. 8, в котором (поперечно) однородное магнитное поле приложено к исполнительному элементу, и в котором частицы, диспергированные в двух смежных секциях 52, 54, имеют, соответственно, по-разному ориентированные намагниченности. В результате, после приложения поперечно однородного магнитного поля 32, каждая их двух смежных секций 52, 54 исполнительного элемента 12 деформируется в отличном соответствующем направлении.
Как показано на фиг. 9(b), посредством переключения направленности приложенного магнитного поля 32, соответствующие направления деформации двух смежных секций 52, 54 могут быть обращены. Динамическое волнистое движение, обеспечиваемое в примере фиг. 8, таким образом, также достижимо в этом примере посредством повторяющегося переключения направленности единственного поперечно однородного магнитного поля 32.
Дополнительные эффекты деформации также достижимы согласно настоящим примерам посредством обеспечения неоднородного распределения частиц в матрице электроактивного полимера исполнительного элемента 12. Эти достижимые эффекты отражают эффекты, показанные и описанные выше со ссылкой на примеры фиг. 4. Посредством расположения магнитных частиц в локальных концентрациях, могут быть реализованы локализованные эффекты деформации.
Со ссылкой на фиг. 4, посредством концентрирования магнитно-жестких частиц в центральной области 42, может быть реализован центрально локализованный изгиб или деформация. Дополнительно, полярность приложенного магнитного поля 32 может быть обращена согласно настоящим примерам для обеспечения посредством этого разных направлений изгиба в этой центральной секции 42 исполнительного элемента. Направление магнитного поля может быть обращено повторно для обеспечения посредством этого, например, колебательного движения. Тот же принцип применим в отношении нецентральной секции 42, показанной на фиг. 4(b).
Дополнительно или альтернативно, как показано на фиг. 4(c), локализованная деформация может быть реализована по массиву локальных областей 42 посредством обеспечения множества локальных концентраций частиц. Посредством обеспечения зажимов между каждыми смежными областями эффект локальной деформации может быть усилен. Дополнительно, согласно описываемым сейчас примерам, направленностью изгиба каждой отдельной секции можно независимо управлять посредством изменения направления приложенного магнитного поля в заданной области. В результате, может быть обеспечен широкий диапазон разных структур деформации.
При описании вышеупомянутых примеров было подробно описано только управление для магнитной деформации исполнительного элемента. Однако следует понимать, что при реализации любого из вышеупомянутых примеров, эффекты магнитной деформации применяются согласованно с электрически создаваемыми эффектами деформации или дополнительно к ним. Как показано на фиг. 3, в примерах может быть обеспечена пара электродов, прикрепленных к противоположным главным поверхностям исполнительного элемента, для приложения электрического стимула в форме приложенного электрического поля к электроактивному полимеру.
Электрически создаваемые деформации могут быть применены одновременно с магнитно создаваемыми деформациями, или контроллер 30 может быть выполнен с возможностью реализовывать согласованное последовательное управление этими двумя стимулами для обеспечения сложных статических или изменяющихся с течением времени структур деформации. Во всех случаях, согласованное управление двумя средствами стимуляции (электронным и магнитным) позволяет значительно увеличить диапазон и ширину разных действий, форм и эффектов деформации.
В любом из примеров, описанных выше, магнитные частицы могут быть магнитострикционными частицами. Магнитострикционные частицы характеризуются преобразованием или трансформированием магнитной энергии в механическую энергию и наоборот. После намагничивания магнитострикционного материала, этот материал демонстрирует деформацию, т.е. изменение его длины на единичной длине. Напротив, внешне создаваемая в магнитном материале деформация (т.е. создаваемая посредством приложения внешней силы) будет приводить к изменению магнитного состояния материала, в результате чего создается изменение магнитного поля, демонстрируемое по материалу. Эта двунаправленная связь между магнитным и механическим состояниями магнитострикционных материалов обеспечивает способность к преобразованию, которая может быть использована как для срабатывания, так и для считывания изменения формы.
Магнитострикционные частицы могут быть образованы из магнитно-мягких материалов или магнитно-жестких материалов, и, следовательно, примеры, описанные ниже, совместимы с любыми примерами, описанными выше.
Простой пример магнитно создаваемой с использованием магнитострикционных частиц деформации показан на фиг. 10. Иллюстративный исполнительный элемент 12 содержит электроактивный полимерный материал, имеющий магнитострикционные частицы, распределенные в нем.
Верхнее изображение показывает исполнительный элемент 12 в нейтральном состоянии перед приложением магнитного поля. Схематично показаны магнитные свойства иллюстративной магнитной частицы 62 в этом первом состоянии. Показано, что иллюстративная частица содержит иллюстративный набор магнитных доменов, каждый из которых содержит магнитные диполи, имеющие разные относительные выравнивания. Хотя показаны только четыре домена, содержащие частицы, выровненные в четырех строго перпендикулярных ориентациях, это показано только в качестве схематичной иллюстрации, и в реальности может быть большее число доменов, и обычно в частице бывает очень большое число (обычно микроскопических) доменов, содержащих диполи, выровненные в разных направлениях.
В отсутствие какого-либо приложенного магнитного поля (как в случае частицы 62), магнитные диполи в разных доменах имеют случайные направления, так что, в макроскопическом масштабе, дипольные моменты нейтрализуются, и каждая частица демонстрирует нулевую результирующую намагниченность.
Нижнее изображение на фиг. 10 показывает исполнительный элемент после приложения однородного магнитного поля (т.е. магнитного поля, имеющего напряженность магнитного поля, которая является однородной на всем протяжении исполнительного элемента и которая не изменяется в зависимости от положения). Однородное магнитное поле прикладывается посредством пригодного средства генерирования магнитного поля (не показано), такого как управляемый электромагнит или другая катушка или соленоид.
Под влиянием приложенного магнитного поля, магнитные диполи разных магнитных доменов магнитострикционной частицы начинают выравниваться в общем направлении (параллельно приложенному полю). Частица 64 схематично представляет магнитные домены иллюстративной частицы после приложения магнитного поля с низкой напряженностью, и частица 66 представляет эти домены после приложения магнитного поля с высокой напряженностью, при котором диполи всех доменов в частице выровнялись и остались в результате в единственном однородном домене диполей, которые все выровнены в общем направлении.
Когда какое-либо однородное магнитное поле прикладывается к такому исполнительному элементу 12, никакие силы притяжения и отталкивания не действуют, но магнитострикционные частицы подвергаются изменению формы в ответ на приложенное поле. В частности, изменяется объем магнитострикционных частиц. Если предположить, что частицы являются сферическими в не-стимулируемом состоянии, то приложение магнитного поля заставляет частицы незначительно деформироваться по форме в эллипсоид. В макромасштабе, это может быть использовано для обеспечения малого срабатывания, которое имеет более высокую силу.
В зависимости от конкретного типа магнитострикционного материала, либо увеличение длины, либо уменьшение длины получают в исполнительном элементе после приложения магнитного поля. В частности, в зависимости от материала, может быть обеспечен один из двух видов магнитострикционного эффекта: положительный магнитострикционный эффект или отрицательный магнитострикционный эффект. Эти разные эффекты имеют разные соответствующие деформационные отклики на приложение заданного магнитного поля.
В примере фиг. 10, показаны частицы отрицательного магнитного материала. Приложение вертикально выровненного магнитного поля приводит к горизонтально выровненной деформации (или сжатию) частиц. Это приводит к общему уменьшению толщины 16 исполнительного элемента.
Следует отметить, что этот деформационный отклик достижим с использованием либо однородного, либо неоднородного магнитного поля. Таким образом, эти примеры отличаются от примеров, описанных выше (относящихся к использованию не-магнитострикционных частиц), в которых магнитно стимулируемое срабатывание достижимо только после приложения неоднородного магнитного поля.
В конкретном примере фиг. 10, однородное магнитное поле 72 прикладывается к исполнительному элементу 12, что вызывает изменение объема магнитных частиц. В зависимости от типа материала может быть обеспечено увеличение длины или уменьшение длины исполнительного элемента. В конкретном примере фиг. 10 показано увеличение длины. Следовательно, матрица электроактивного полимера исполнительного элемента будет расширяться в направлении, перпендикулярном толщине 16 исполнительного элемента. Это расширение может быть использовано для обеспечения усилия срабатывания с малой амплитудой, но большой силой.
Как отмечено выше, деформационный отклик иллюстративной частицы на приложение магнитного поля с низкой напряженностью показан ссылочной позицией 64. Как можно увидеть, имеется незначительное расширение частицы в поперечном направлении.
В дополнительных примерах, может быть использован магнитострикционный материал, который выполнен с возможностью сокращаться под влиянием магнитного поля. В этом случае, матрица электроактивного полимера будет, соответственно, сжиматься, снова с малой амплитудой, но большой силой. Комбинация обоих этих видов материала в единственном исполнительном элементе может в примерах позволить обеспечить двунаправленное управление, при котором разные секции исполнительного элемента могут, соответственно, либо расширяться, либо сокращаться.
Согласно одному или нескольким дополнительным примерам, магнитострикционные частицы могут быть неоднородно распределены по исполнительному элементу для обеспечения посредством этого набора локальных концентраций магнитных частиц. Это может позволить обеспечить эффекты, подобные эффектам, описанным в связи с примером фиг. 4, в котором достижимы локализованные эффекты деформации. Например, посредством концентрирования частиц в наборе из трех отличных концентраций, как на фиг. 4(c), разные эффекты сжатия и расширения могут стимулироваться в каждой из локализованных областей 42. В частности, в областях с высокой концентрацией частиц, любое расширение или сжатие полимерной матрицы будет большим, и, следовательно, будут возникать локальные эффекты деформации. Неоднородность частиц в смеси электроактивного полимера может быть обеспечена конструкцией для создания любой требуемой конфигурации деформации.
Согласно одному или нескольким дополнительным примерам, однородное или неоднородное распределение частиц может быть использовано в комбинации со структурированным магнитным полем для обеспечения посредством этого разных эффектов деформации в разных локальных областях исполнительного элемента. В частности, структурированное магнитное поле может иметь разные напряженности или направления поля в разных локальных областях для реализации посредством этого локально изменяющихся эффектов деформации.
Использование магнитострикционных частиц может быть предпочтительно объединено с любыми другими примерами, описанными выше.
Теперь будут описаны примеры согласно вариантам осуществления настоящего изобретения.
Варианты осуществления настоящего изобретения относятся к считыванию изменений формы исполнительного элемента на основе EAP посредством контроля магнитных свойств магнитных частиц, диспергированных в EAP.
Варианты осуществления обеспечивают исполнительное устройство, включающее в себя исполнительный элемент на основе EAP, имеющий встроенные магнитные частицы, и дополнительно включающее в себя датчик магнитного поля для детектирования напряженности магнитного поля в теле исполнительного элемента или вблизи него. Контроллер выполнен с возможностью определять на основе выходных данных датчика магнитного поля указание на изменение формы исполнительного элемента. В конкретных вариантах осуществления, определенное изменение формы может быть использовано в качестве обратной связи в управлении структурой деформации исполнительного элемента.
Контроллер согласно по меньшей мере одному набору вариантов осуществления, в частности, выполнен с возможностью определять указание на изменение толщины исполнительного элемента. Исполнительный элемент может, например, иметь слоевую структуру, содержащую противоположные главные поверхности. В этом случае толщину следует понимать, как размер исполнительного элемента, продолжающийся между двумя главными поверхностями в направлении нормали к каждой из них. Однако, в общем, толщина может относиться к любому произвольному размеру исполнительного элемента, но чаще всего может относиться к меньшему или наименьшему из трех размеров любого исполнительного элемента, обеспечиваемого согласно вариантам осуществления настоящего изобретения.
Хотя ниже будут описаны конкретные примеры, которые относятся, в частности, к измерению изменения толщины исполнительного элемента, следует понимать, что в дополнительных примерах, подобные идеи могут быть легко применены к определению других аспектов изменения формы. Эти аспекты, в качестве неограничивающего примера, включают в себя изменения ширины, высоты или длины исполнительного элемента, или изменения кривизны или топологии исполнительного элемента. Изменения формы могут в дополнительных примерах включать в себя изменения общего профиля или контура исполнительного элемента.
Эта идея может быть применена к исполнительным элементам, содержащим магнитно-жесткие частицы, магнитно-мягкие частицы, и/или магнитострикционные частицы. Теперь будут подробно описаны конкретные примеры, относящиеся к каждому из этих случаев.
Идея, применяемая к иллюстративному исполнительному элементу, содержащему диспергированные магнитно-мягкие частицы, показана на фиг. 11-13. Эта идея основана в этом случае на контроле магнитной проницаемости исполнительного элемента, содержащего диспергированные магнитно-мягкие частицы.
Для частиц с высокой магнитной проницаемостью, таких как ферритовые частицы (магнитная проницаемость которых может легко превышать 1000), можно получить, что магнитная проницаемость (μ) композиционного материала на основе электроактивного полимера пропорциональна следующему выражению:
μ=αNd/<g> (1)
где α является коэффициентом пропорциональности, N является числом частиц на единицу площади поверхности, перпендикулярной толщине исполнительного элемента (причем толщину следует понимать в смысле, описанном в предыдущем разделе), d является средним размером каждой частицы, параллельным толщине исполнительного элемента, и <g> является средним взаимным расстоянием между магнитными частицами исполнительного элемента в направлении, параллельном толщине.
В случае, когда длина d диспергированных частиц увеличивается в направлении, параллельном толщине исполнительного элемента (т.е. при придании им отношения размеров, не равного 1), общая величина демонстрируемой магнитной проницаемости для любого заданного <g> значительно увеличивается. Это схематично показано на фиг. 11, которая показывает иллюстративный исполнительный элемент 12, имеющий диспергированные магнитные частицы. На находящемся слева изображении, частицы являются по существу симметричными по размерам высоты и ширины и имеют малый размер d 82 и большой зазор-расстояние <g>.
Находящееся справа изображение показывает исполнительный элемент с частицами, имеющими значительно увеличенный размер d 82 в высоту, и вследствие этого зазор-расстояние <g> значительно уменьшился. Вследствие этих изменений, магнитная проницаемость μ увеличивается в сто раз. Эти числовые данные обеспечиваются только в качестве иллюстрации, и равным образом применима любая эквивалентная адаптация частиц для обеспечения увеличенного размера d высоты.
Обеспечение этих эллипсоидальных частиц с увеличенной высотой может быть достигнуто посредством любого процесса из ряда общеизвестных процессов, и средство для образования таких частиц сразу станет очевидным специалисту в данной области техники (в частности, химику, специализирующемуся по коллоидам).
Однородное выравнивание частиц, показанное на фиг. 11, может быть обеспечено в примерах посредством приложения относительно большого, однородного магнитного поля к исполнительному элементу 12 при увеличении его температуры для уменьшения посредством этого сил вязкостного сопротивления матрицы электроактивного полимера. Неоднородное поле также может быть использовано для выравнивания частиц. Однако это может приводить к приложению к частицам результирующей силы поступательного движения, вызывающей нарушение распределения частиц в матрице EAP. Использование однородного магнитного поля предотвращает это затруднение.
После обеспечения требуемого выравнивания, температура может быть снова уменьшена для фиксации частиц на их месте, и приложенное магнитное поле может быть удалено.
При рассмотрении частиц материала, имеющего высокую собственную магнитную проницаемость, эффективная магнитная проницаемость исполнительного элемента 12 приблизительно пропорциональна d/<g>. Когда частицы уже соответствующим образом выровнены, как в находящемся справа изображении фиг. 11, взаимный пространственный зазор <g> обычно является значительно меньшим, чем размер d «высоты» частицы. Типичное значение для отношения d:g может составлять, например, 10:1. В результате, эффективная магнитная проницаемость исполнительного элемента в нейтральном состоянии несрабатывания может быть приблизительно пропорциональной μ=α*N*10.
При приложении напряжения между электродами 26 (расположенными на противоположных главных поверхностях исполнительного элемента), электрическое поле устанавливается через исполнительный элемент 12, посредством чего стимулируется уменьшение толщины исполнительного элемента. В случае, когда магнитные частицы являются более твердыми, чем матрица электроактивного полимера, это сжатие по толщине вынуждает частицы сближаться друг с другом, в результате чего уменьшается среднее взаимное пространственное расстояние <g>.
Это схематично показано на фиг. 12, которая показывает иллюстративный исполнительный элемент 12, имеющий множество диспергированных магнитно-мягких частиц 82. После приложения электрического поля между электродами 26, исполнительный элемент стимулируется сжиматься по толщине, что приводит к состоянию срабатывания, показанному на находящемся справа изображении фиг. 12. Как показано, взаимный пространственный зазор d между частицами значительно уменьшился.
В частности, если этот зазор уменьшится до половины своего размера, то магнитная проницаемость μ удвоится, так что она может быть приблизительно пропорциональной μ=α*N*20. Если этот зазор уменьшится до одной десятой своего исходного размера, то магнитная проницаемость увеличится в 10 раз, так что она может быть приблизительно пропорциональной μ=α*N*100. Если сжатие элемента 12 будет достаточно большим для того, чтобы зазор между частицами полностью исчез (т.е., чтобы EAP, находящийся между частицами, был полностью выдавлен, и между частицами остался нулевой зазор), то магнитная проницаемость возвратится к собственной магнитной проницаемости частиц, так что она будет приблизительно пропорциональной μ=α*N*μсобственная. Как указано выше, это может быть в некоторых случаях величина, превышающая 1000.
Следовательно, изменения толщины исполнительного элемента (независимо от того, осуществляется ли это посредством электрически создаваемой деформации или иным образом) прямо преобразуются в измеряемые изменения демонстрируемой магнитной проницаемости исполнительного элемента. Когда конструкция исполнительного элемента соответствует примерам фиг. 11 и 12, малые изменения толщины приводят к большим изменениям демонстрируемой магнитной проницаемости (например, к изменениям на порядки). Следовательно, посредством измерения изменений магнитной проницаемости исполнительного элемента 12 могут быть количественно получены изменения толщины.
Магнитная проницаемость исполнительного элемента может быть измерена в примерах посредством дополнительно обеспеченного магнитного датчика, например, магнитной записывающей головки или датчика Холла. В примерах, исполнительное устройство может дополнительно содержать средство генерирования магнитного поля для приложения малого (например, однородного) магнитного поля к исполнительному элементу, и причем магнитную проницаемость измеряют посредством измерения изменений демонстрируемого вспомогательного поля по исполнительному элементу (т.е. с использованием общего соотношения B=μH). Посредством приложения однородного магнитного поля, эта функциональность считывания может быть обеспечена без создания помех какой-либо магнитно создаваемой деформации исполнительного элемента с использованием неоднородного магнитного поля. Таким образом, считывание толщины, описанное здесь, может быть предпочтительно объединено или скомбинировано с любыми иллюстративными исполнительными устройствами, описанными выше.
Исполнительное устройство фиг. 12 может дополнительно содержать контроллер (не показан), с которым может быть оперативно связан магнитный датчик (и, необязательно, средство генерирования магнитного поля). Контроллер может быть выполнен с возможностью управлять датчиком для контроля магнитной проницаемости исполнительного элемента или для контроля напряженности магнитного поля по исполнительному элементу. На основе измеренной напряженности магнитного поля, контроллер может быть выполнен с возможностью вычислять изменение или абсолютное значение магнитной проницаемости по исполнительному элементу.
В примерах, измеренная или определенная магнитная проницаемость (или изменение магнитной проницаемости) может быть преобразована в соответствующее изменение толщины с использованием сохраненной справочной таблицы. Справочная таблица может быть запомнена в памяти, содержащейся в исполнительном устройстве, например, содержащейся в контроллере. Справочная таблица может запоминать соответствующие значения изменения толщины, которые, как известно, соответствуют некоторому диапазону разных возможных измеренных или определенных значений магнитной проницаемости. Альтернативно, изменения толщины могут быть вычислены контроллером с использованием теоретических соотношений.
В конкретных примерах, измеренное значение магнитной проницаемости или определенные значения толщины могут быть использованы контроллером в управлении магнитной и/или электрической стимуляцией исполнительного элемента. Таким образом, измеренные изменения толщины элемента могут быть использованы для передачи данных управления о степени срабатывания или форме исполнительного элемента. Функциональности считывания, описанные выше, могут быть, следовательно, использованы в качестве некоторой формы прямой обратной связи в управлении деформацией исполнительного элемента.
Согласно одному или нескольким примерам, магнитные частицы могут быть распределены неоднородно на протяжении исполнительного элемента 12. На фиг. 13 показан пример, который показывает исполнительный элемент, содержащий три пространственно отдельные локальные концентрации 42 магнитно-мягких частиц, распределенных по матрице EAP исполнительного элемента. Посредством обеспечения показанной неоднородности частиц, может быть обеспечена возможность считывания толщины исполнительного устройства в разных локальных секциях исполнительного элемента. В частности, отдельный специальный магнитный датчик может быть обеспечен для считывания магнитного поля или магнитной проницаемости по каждой локальной концентрации 42. Таким образом, могут быть обеспечены независимые локальные меры магнитной проницаемости и, следовательно, изменения толщины.
Эта идея, применяемая к иллюстративному исполнительному элементу, содержащему диспергированные магнитно-жесткие частицы, показана на фиг. 14 и 15. Идея основана в этом случае на контроле степени намагниченности, демонстрируемой по ограниченному поперечному растяжению исполнительного элемента. Когда толщина изменяется, объем на единицу площади поверхности исполнительного элемента изменяется, в результате чего изменяется число постоянно намагниченных частиц, вносящих свой вклад в намагниченность, на протяжении любой фиксированной длины. Это может быть считано сопутствующим датчиком магнитного поля и использовано для обеспечения указания на степень любого изменения толщины.
Простой пример этого варианта осуществления показан на фиг. 14. Находящееся слева изображение показывает иллюстративный исполнительный элемент 12, имеющий диспергированные магнитно-жесткие частицы в неактивном состоянии (состоянии несрабатывания). Находящееся справа изображение показывает исполнительный элемент после приложения электрического поля по его толщине 16, между электродами 96, 98. Электрическое поле стимулирует деформацию материала на основе EAP исполнительного элемента, что приводит к уменьшению толщины.
Вблизи исполнительного элемента 12 расположен датчик 92 магнитного поля, выполненный с возможностью контролировать или измерять напряженность магнитного поля в некотором местоположении внутри исполнительного элемента или вблизи него.
Как схематично показано на фиг. 14, после электрической стимуляции исполнительного элемента 12, число магнитных частиц, расположенных в области 102 считывания магнитного датчика 92, уменьшается. В результате, общая напряженность магнитного поля, демонстрируемая этой конкретной поперечной секцией исполнительного элемента, уменьшается на измеряемую величину. Посредством контроля изменений напряженности магнитного поля, считываемых датчиком 92 магнитного поля, могут быть детектированы и проконтролированы изменения толщины исполнительного элемента.
Датчик 92 магнитного поля может быть оперативно связан с контроллером (не показан на фиг. 14), причем контроллер выполнен с возможностью определять, на основе считанных напряженностей магнитного поля, указания на любое изменение толщины исполнительного элемента. Это может быть обеспечено в конкретных примерах посредством заданной справочной таблицы, запомненной в локальной памяти контроллера или доступной для контроллера, запоминающей значения толщины исполнительного элемента, коррелирующиеся с каждой измеренной напряженностью магнитного поля из набора измеренных напряженностей магнитного поля. Эти значения могут быть, например, получены экспериментально для каждого конкретного исполнительного элемента или могут быть стандартными значениями, которые, как известно, относятся ко всем исполнительным элементам с конкретной спецификацией. Значения изменения толщины могут быть альтернативно определены контроллером на основе известного теоретического соотношения.
Определенные изменения толщины исполнительного элемента могут быть в некоторых вариантах осуществления использованы для обеспечения обратной связи по смещению для управления исполнительным устройством 12. В примерах может быть установлена замкнутая система автоматического управления, в которой измерения толщины обеспечивают прямую или непрямую обратную связь для информирования контроллера при управлении электрической стимуляцией исполнительного элемента. Например, посредством заданной справочной таблицы или иного средства, контроллер может быть выполнен с возможностью увеличивать электрическое напряжение, прикладываемое между электродами 96, 98 до тех пор, пока не будет достигнута требуемая толщина, после чего напряжение выходит на постоянное значение.
Точное соотношение между толщиной исполнительного устройства и изменением считываемой напряженности магнитного поля зависит от множества факторов: от числа постоянных частиц, считываемых датчиком 92 магнитного поля, от расстояния от этих частиц до датчика, а также от конкретной формы деформации, создаваемой при срабатывании исполнительного устройства - например, изгиб исполнительного устройства может приводить к зависимому от напряжения изменению среднего расстояния между магнитными частицами и датчиком.
Это схематично показано на фиг. 15, которая показывает иллюстративный исполнительный элемент 12, имеющий диспергированные магнитно-жесткие частицы и закрепленный на каждом конце набором зажимов 18. При электрической стимуляции исполнительного элемента, изгиб создается вследствие этого закрепления, что приводит к увеличению расстояния между магнитными частицами и датчиком 92 магнитного поля. Это обычно приводит к уменьшению считываемой напряженности магнитного поля. Для учета этого, контроллер может быть выполнен с возможностью компенсировать заданным образом ожидаемые изменения напряженности поля, возникающие в результате электрической деформации. Для обеспечения этого, контроллер может быть оперативно связан как с электродами 96, 98, так и с датчиком магнитного поля таким образом, чтобы он мог в любое время узнавать конкретное напряжение, приложенное к исполнительному элементу. Это может быть затем использовано при вычислении скомпенсированного значения напряженности поля.
Для любого варианта осуществления настоящего аспекта изобретения, электрические и магнитные эффекты срабатывания могут быть настроены в количественном отношении посредством изменения концентрации магнитных частиц, диаметра частиц, и/или формы частиц.
Эта идея применима к иллюстративному исполнительному элементу, содержащему диспергированные магнитострикционные частицы, который схематично показан на фиг. 16. Идея в этом случае также основана на контроле степени намагниченности, демонстрируемой магнитными частицами в исполнительном элементе. После электрической стимуляции исполнительного элемента и последующей деформации, в матрице EAP создаются механические напряжения с величиной, зависящей от деформированного состояния, создаваемого в исполнительном элементе этой деформацией. Эти механические напряжения в свою очередь прикладываются к магнитострикционным частицам. Как описано выше, магнитострикционные частицы имеют свойство изменять свою намагниченность ожидаемым образом в ответ на приложенные механические напряжения. Поэтому можно увидеть, что посредством контроля демонстрируемой намагниченности в по меньшей мере одной секции исполнительного элемента может определяться и контролироваться изменение толщины исполнительного элемента (т.е. компонента с создаваемой деформацией).
Пример схематично показан на фиг. 16, которая показывает иллюстративный исполнительный элемент 12, образованный из электроактивного полимерного материала, имеющего диспергированные в нем магнитострикционные частицы. Находящееся слева изображение показывает исполнительный элемент в исходном состоянии несрабатывания. Магнитные свойства одной иллюстративной магнитной частицы схематично показаны ссылочной позицией 62, которая показывает, что в этом исходном состоянии частицы имеют нулевую результирующую намагниченность (магнитные диполи выровнены в случайных направлениях). После деформации исполнительного элемента, форма магнитных частиц деформируется и изменяется от сферической формы у ссылочной позиции 62 до более эллипсоидной формы у ссылочной позиции 63. В результате, частица может приобретать результирующую намагниченность (показанную у ссылочной позиции 63). В настоящем примере предполагается, что частицы образованы из положительного магнитострикционного материала. В результате, частицы откликаются на горизонтально выровненную деформацию исполнительного элемента соответствующей горизонтально выровненной намагниченностью (в настоящем примере, направленной справа налево с точки зрения фиг. 16). В отношении направления намагниченности следует отметить следующее: поскольку магнитный диполь находится в горизонтальной плоскости, не существует никакого предпочтительного направления. Однако, когда плотность частиц является достаточно высокой, может существовать взаимное влияние, в результате чего ориентации магнитных диполей выравниваются в одном направлении в горизонтальной плоскости. Можно учитывать это при разработке или эксплуатации.
Конкретные формы частиц, показанные на фиг. 16, представлены только для иллюстрации упомянутой идеи, и в дополнительных примерах частицы могут иметь любую требуемую форму без уменьшения заявленных эффектов этого варианта осуществления настоящего изобретения.
Изменения демонстрируемой намагниченности могут быть измерены посредством обеспеченного датчика магнитного поля. Этот датчик может быть, в качестве неограничивающего примера, проводящей обмоткой (такой как магнитная записывающая головка) или, например, датчиком Холла или магниторезистивным датчиком. Другие датчики предшествующего уровня техники, пригодные для измерения напряженности магнитного поля, будут сразу очевидны специалистам в данной области техники.
Датчик магнитного поля может быть оперативно связан с контроллером, выполненным с возможностью определять, на основе детектированных напряженностей поля, значения или изменения толщины 16 исполнительного элемента 12. Изменения толщины могут быть определены в примерах посредством заданной справочной таблицы, запомненной в локальной памяти контроллера или доступной для контроллера, запоминающей значения толщины исполнительного элемента, коррелирующиеся с каждой измеренной напряженностью магнитного поля из набора измеренных напряженностей магнитного поля. Эти значения могут быть, например, получены экспериментально для каждого конкретного исполнительного элемента или могут быть стандартными значениями, которые, как известно, относятся ко всем исполнительным элементам с конкретной спецификацией. Значения изменения толщины могут быть альтернативно определены контроллером на основе известного теоретического соотношения.
Как и в вышеупомянутых примерах, определенные изменения толщины исполнительного элемента могут быть в примерах настоящего варианта осуществления использованы для обеспечения обратной связи по смещению для управления исполнительным устройством 12. В примерах может быть установлена замкнутая система автоматического управления, в которой измерения толщины обеспечивают прямую или непрямую обратную связь для информирования контроллера при управлении электрической стимуляцией исполнительного элемента.
Как и в описанном выше варианте осуществления, измеряемая напряженность магнитного поля может зависеть от некоторого количества факторов, включающих в себя расстояние между магнитными частицами и датчиком магнитного поля. Это расстояние может изменяться в зависимости от приложенного напряжении (или тока) поля в случае, когда исполнительный элемент выполнен с возможностью изгибаться вследствие электрической стимуляции. Контроллер может быть в примерах выполнен с возможностью компенсировать такие зависящие от напряжения изменения напряженности поля, например, согласно способам, описанным в отношении предыдущего примера.
Также, как описано в отношении предыдущего примера, определенные изменения толщины могут быть использованы контроллером для передачи данных управления о деформации исполнительного элемента. Определенные изменения толщины могут быть использованы, например, в качестве части контура обратной связи при управлении поведением срабатывания исполнительного устройства (как описано выше).
Как описано выше, магнитострикционные частицы могут быть частицами, образованными либо из магнитно-жесткого материала, либо из магнитно-мягкого материала. Соответственно, примеры настоящего варианта осуществления могут быть в конкретных примерах объединены или скомбинированы с любыми примерами, описанными выше.
Согласно любому варианту осуществления настоящего изобретения, считывание изменений формы исполнительного элемента может быть выполнено одновременно со стимулированием деформации исполнительного элемента посредством либо электрической стимуляции, либо магнитной стимуляции. Для одновременного магнитного считывания и магнитно стимулируемой деформации, определение изменений формы (например, толщины) может потребовать компенсации известного магнитного поля, активно приложенного к исполнительному элементу.
Например, в случае диспергированных магнитно-жестких частиц, любая измеренная напряженность магнитного поля по исполнительному элементу может обычно включать в себя магнитное поле, приложенное для стимулирования деформации. Для контроля изменения формы (посредством контроля изменений демонстрируемой напряженности магнитного поля по элементу - как описано в примерах, приведенных выше) необходимо только вычитать или, иначе, устранять из измеряемой напряженности поля величину известного активно прикладываемого магнитного поля. Подобная схема компенсации может быть также применена в случае измерения изменений формы в исполнительных элементах, имеющих встроенные магнитно-мягкие или магнитострикционные частицы.
Согласно любому варианту осуществления настоящего изобретения, может быть обеспечено определение изменения формы (например, толщины) исполнительного элемента, вызванного (либо электрическим, либо магнитным) стимулированием срабатывания этого элемента. Это может быть обеспечено, в частности, посредством определения указания на форму этого элемента до срабатывания и затем определения указания на форму после срабатывания этого элемента. Как описано выше, справочные таблицы или вычислительные способы могут быть использованы для определения, на основе детектированных напряженностей магнитного поля до и после срабатывания, указания на форму исполнительного элемента (например, указания на толщину, высоту или ширину). Посредством сравнения этих двух значений (например, посредством вычитания одного из другого) может быть получено указание на изменение формы.
Хотя в подробном описании, приведенном здесь выше, конструкция и работа устройств и систем согласно настоящему изобретению были описаны для EAP, настоящее изобретение может быть фактически использовано для устройств на основе других видов EAM (электроактивного материала). Следовательно, если не указано иное, то вышеупомянутые материалы на основе EAP могут быть заменены другими материалами на основе EAM. Такие другие материалы на основе EAM известны в данной области техники, и специалист в данной области техники знает, где их можно найти и как их следует применять. Некоторые варианты будут описаны здесь ниже.
EAM с полевым управлением могут быть органическими или неорганическими материалами и, в случае, когда они являются органическими, они могут быть одномолекулярными, олигомерными или полимерными материалами. Они являются, в общем, пьезоэлектриками и, возможно, сегнетоэлектриками и, таким образом, содержат спонтанную постоянную поляризацию (дипольный момент). Альтернативно, они являются электрострикционными и, таким образом, содержат поляризацию (дипольный момент) только при возбуждении, но не в отсутствие возбуждения. Альтернативно, они являются диэлектрическими релаксорными материалами. Такие полимеры включают в себя, но не ограничены этим, подклассы: пьезоэлектрических полимеров, сегнетоэлектрических полимеров, электрострикционных полимеров, релаксорных сегнетоэлектрических полимеров (таких как релаксорные полимеры на основе PVDF или полиуретаны), диэлектрических эластомеров, жидкокристаллических эластомеров. Другие примеры включают в себя электрострикционные графт-полимеры, электрострикционную бумагу, электреты, электро-вязкоупругие эластомеры и жидкокристаллические эластомеры.
Отсутствие спонтанной поляризации означает, что электрострикционные полимеры демонстрируют малые гистерезисные потери или не имеют никаких гистерезисных потерь на очень высоких частотах работы. Эти преимущества, однако, достигаются за счет температурной стабильности. Релаксоры лучше всего работают в ситуациях, когда температура может быть стабилизирована в диапазоне, приблизительно, 10°С. Это может показаться на первый взгляд сильным ограничением, но при условии, что электрострикторы имеют преимущество на высоких частотах и очень слабых управляющих полях, эти применения, как правило, имеют место в специализированных микро-исполнительных устройствах. Температурная стабилизация таких малых устройств является относительно простой и часто не является значительной проблемой в общем процессе конструирования и разработки.
Релаксорные сегнетоэлектрические материалы могут иметь константу электрострикции, которая достаточно велика для хорошего практического применения, т.е. они могут быть предпочтительными одновременно для функций считывания и срабатывания. Релаксорные сегнетоэлектрические материалы не являются сегнетоэлектриками, когда к ним приложено нулевое возбуждающее поле (т.е. напряжение), но становятся сегнетоэлектриками при возбуждении. Следовательно, в отсутствие возбуждения в материале не существует электромеханической связи. Электромеханическая связь становится ненулевой, когда подается сигнал возбуждения, и может быть измерена посредством подачи высокочастотного сигнала с малой амплитудой поверх сигнала возбуждения, согласно процедурам, описанным выше. Кроме того, релаксорные сегнетоэлектрические материалы имеют преимущество вследствие уникальной комбинации большой электромеханической связи при ненулевом сигнале возбуждения и хороших характеристик срабатывания.
Наиболее часто используемыми примерами неорганических релаксорных сегнетоэлектрических материалов являются: ниобат свинца - магния (lead magnesium niobate - PMN), ниобат свинца - магния - титанат свинца (lead magnesium niobate-lead titanate - PMN-PT) и цирконат - титанат свинца - лантана (lead lanthanum zirconate titanate - PLZT). Но в данной области техники известны и другие неорганические релаксорные сегнетоэлектрические материалы.
Полимеры на основе релаксорных сегнетоэлектриков на основе PVDF демонстрируют спонтанную электрическую поляризацию, и они могут быть предварительно деформированы для улучшения характеристик в направлении деформации. Они могут быть любыми материалами, выбранными из группы материалов, приведенных ниже.
Поливинилиденфторид (Polyvinylidene fluoride - PVDF), поливинилиденфторид - трифторэтилен (Polyvinylidene fluoride - trifluoroethylene - PVDF-TrFE), поливинилиденфторид - трифторэтилен - хлорфторэтилен (Polyvinylidene fluoride - trifluoroethylene - chlorofluoroethylene - PVDF-TrFE-CFE), поливинилиденфторид - трифторэтилен - хлортрифторэтилен (Polyvinylidene fluoride - trifluoroethylene - chlorotrifluoroethylene - PVDF-TrFE-CTFE), поливинилиденфторид - гексафторпропилен (Polyvinylidene fluoride - hexafluoropropylene - PVDF - HFP), полиуретаны или их смеси.
EAM и EAP с токовым управлением содержат сопряженные полимеры, ионные полимерно-металлические композиционные материалы, ионные гели и полимерные гели.
Примерами EAP с ионным управлением являются сопряженные полимеры, полимерные композиционные материалы на основе углеродных нанотрубок (carbon nanotube - CNT) и ионные полимерно-металлические композиционные материалы (Ionic Polymer Metal Composites - IPMC).
Подкласс диэлектрических эластомеров включает в себя, но не ограничен этим:
акрилаты, полиуретаны, силоксаны.
Подкласс сопряженных полимеров включает в себя, но не ограничен этим:
полипиррол, поли-3,4-этилендиокситиофен, поли(п-фениленсульфид), полианилины.
Материалы, упомянутые выше, могут быть реализованы в виде чистых материалов или в виде материалов, суспендированных в матричных материалах. Матричные материалы могут содержать полимеры.
Для любой исполнительной конструкции, содержащей материал на основе EAM, могут быть обеспечены дополнительные пассивные слои, влияющие на поведение EAM-слоя в ответ на подаваемый сигнал возбуждения.
Исполнительная система или конструкция устройства на основе EAP может иметь один или несколько электродов для обеспечения управляющего сигнала или сигнала возбуждения по меньшей мере для части электроактивного материала. Предпочтительно, система содержит два электрода. EAP может быть расположен между двумя или более электродами. Это промежуточное расположение необходимо для исполнительной системы, которая содержит эластомерный диэлектрический материал, поскольку ее срабатывание происходит, среди прочего, вследствие сжимающего усилия, оказываемого электродами, притягивающимися друг к другу вследствие подачи сигнала возбуждения. Упомянутые два или более электродов могут быть также встроены в эластомерный диэлектрический материал. Электроды могут быть структурированными или неструктурированными.
Подложка может быть частью исполнительной системы. Она может быть прикреплена к набору из EAP и электродов между электродами или к одному из электродов снаружи.
Электроды могут быть растяжимыми, чтобы они следовали за деформацией слоя материала на основе EAM. Это особенно предпочтительно для материалов на основе EAP. Материалы, пригодные для электродов, также являются общеизвестными и могут быть, например, выбраны из группы, состоящей из тонких металлических пленок, таких как золотые, медные, или алюминиевые пленки, или органических проводников, таких как углеродная сажа, углеродные нанотрубки, графен, полианилин (PANI), поли(3,4-этилендиокситиофен) (PEDOT), например, поли(3,4-этилендиокситиофен)-поли(стиролсульфонат) (PEDOT:PSS). Также могут быть использованы металлизированные полиэфирные пленки, такие как металлизированный полиэтилентерефталат (polyethylene terephthalate - PET), например, с использованием алюминиевого покрытия.
Некоторые системы могут иметь электродные слои на каждой стороне слоя электроактивного материала. Также можно обеспечить электродный слой только на одной стороне, например, с использованием встречно-гребенчатых электродов.
Материалы для разных слоев могут выбираться, например, с учетом модулей упругости (модулей Юнга) разных слоев.
Для адаптации электрических или механических свойств устройства могут быть использованы слои, дополнительные к слоям, описанным выше, например, дополнительные полимерные слои.
Примеры, приведенные выше, используют композиционные материалы, которые объединяют электроактивный материал (в частности, полимер) и другие частицы (которые будут называться, в общем, «наполнителем»).
Теперь будет описан способ изготовления таких композиционных материалов, а также эффекты на основе физических и электрических свойств электроактивного материала.
Сначала будет представлен пример электроактивных материалов на основе диэлектрических эластомеров. Эти материалы располагают между двумя электродами для создания исполнительных устройств на основе диэлектрических электроактивных полимеров. Силоксановые каучуки являются основной применяемой группой эластомеров. Деформация является результатом сил притяжения между положительно и отрицательно заряженными электродами.
Введение частиц в силоксаны широко используется в промышленном масштабе. В качестве примера, линзы ультразвуковых преобразователей изготавливаются из силоксана (полидиметилсилоксана - PDMS), заполненного частицами железа и оксида кремния для увеличения акустического полного сопротивления и износостойкости. Соединения на основе PDMS (силоксана), содержащие рутил (TiO2), широко используются для увеличения показателя преломления или для создания белых отражающих материалов.
В отношении характеристик диэлектрического электроактивного полимера, смешивание с электрически непроводящими твердыми частицами, такими как керамические частицы, обеспечивает два основных значительных эффекта. Во-первых, жесткость материала увеличивается, в результате чего требуются большие усилия для получения тех же самых уровней деформации. Другой эффект состоит в том, что диэлектрическая проницаемость композиционного материала изменяется (в общем, диэлектрическая проницаемость наполнителя будет большей, чем диэлектрическая проницаемость силоксанов, которая близка к 3). То, будет ли эффект деформации, зависящий от напряжения, положительным или отрицательным, зависит от диэлектрической проницаемости частиц и размера частиц, поскольку меньшие частицы оказывают большее влияние на жесткость.
Это описано в работе: S. Somiya, "Handbook of Advanced Ceramics: Materials, Applications, Processing, and Properties," in Nonlinear Dielectricity of MLCCs, Waltham, Academic Press, 2013, стр. 415. В качестве примера, добавление частиц увеличивает диэлектрическую проницаемость, а также увеличивает жесткость.
Таким образом, введение наполнителей в эластомеры, чтобы повлиять на свойства диэлектрического электроактивного полимера, является общеизвестным.
Силоксановые эластомеры, в общем, изготавливаются посредством смешивания двух компонентов. Один из них содержит Pt или пероксидный отверждающий катализатор. Разные компоненты могут быть смешаны в высокоскоростном смесителе. В том же процессе может быть добавлен наполнитель, или наполнитель может быть уже предварительно смешан с одним или обоими компонентами. Материал наполнителя, в общем, подается в растворителе, который испаряется во время процесса. После или во время смешивания в высокоскоростном смесителе, в общем, вакуум применяют для удаления включений воздуха (и/или растворителей). После этого смесь можно формовать литьем и отверждать. Температура и время отверждения зависят от сорта полимера, но обычно составляют около 80°С для 10 минут. Большинство частиц совместимы с силоксанами, поскольку они не дезактивируют катализатор (например, серосодержащие материалы). Пероксидные отверждающие силоксаны являются менее чувствительными.
Силоксаны могут формоваться литьем под давлением (жидкие силоксановые каучуки (liquid silicone rubbers - LSR)). Упомянутые два компонента после прохождения (статического) смесителя впрыскивают на шнек машины для литья LSR под давлением. Частицы наполнителя могут предварительно смешиваться с одним или обоими компонентами. Материал транспортируется холодным шнеком и впрыскивается в горячую пресс-форму, где он быстро отверждается в зависимости от температуры. Поскольку LSR имеет очень низкую вязкость, могут быть реализованы очень тонкие секции. Типичные температуры отверждения близки к 180°С, и времена отверждения составляют от около 30 секунд до около одной минуты.
Кроме литья и литья под давлением доступно некоторое количество других технологий формования для изготовления компонентов смесей на основе силоксановых каучуков, также и в форме тонких пленок. Примерами являются экструзия (фольга и профили), прокатывание фольги, ламинирование и прокатывание множественных слоев, литье пленки с использованием ножевого устройства, нанесение покрытия методом центрифугирования и трафаретная печать.
Заполнение может быть выполнено локально на месте изготовления, например, с использованием литья под давлением с множественными циклами (литья с двумя или более циклами), розлива силоксана с дозированием и послойного литья силоксана или аддитивной технологии изготовления силоксана (т.е. трехмерной (3D) печати).
Далее будет представлен пример композиционных материалов на основе пьезоэлектрических полимеров.
Были изучены композиционные материалы на основе пьезоэлектрических полимеров, содержащие смесь PVDF (матричного полимера) и керамических частиц, таких как PZT. Пригодны технологии изготовления, такие как формование окунанием в раствор и нанесение покрытия методом центрифугирования. Также пригодны технологии холодного и горячего прессования. После растворения PVDF, испаряют растворитель до тех пор, пока не будет получена вязкая смесь, и затем может быть выполнено смешивание с частицами наполнителя. Могут быть реализованы композиционные материалы на основе PVDF-полимера с хорошо диспергированным гранулометрическим составом и неповрежденной полимерной матрицей.
Далее будет представлен пример исполнительных устройств на основе релаксорных электрострикционных полимеров.
Эти полимеры являются классом полукристаллических терполимеров, которые могут обеспечивать относительно большое усилие со средней деформацией. Таким образом, эти исполнительные устройства имеют широкий диапазон возможных применений. Релаксорные электрострикционные полимеры были созданы на основе «нормальных» PVDF-полимеров посредством использования надлежащих модификаций дефектов. Они содержат: винилиденфторид (vinylidene fluoride - VDF), трифторэтилен (trifluoroethylene - TrFE), и 1, 1-хлорфторэтилен (1, 1-chlorofluoroethylene - CFE) или хлортрифторэтилен (Chlorotrifluoro ethylene - CTFE).
Добавление дефектов в форме химических мономеров, таких как 1, 1-хлорфторэтилен (CFE), которые сополимеризуются с VDF-TrFE, устраняет нормальную сегнетоэлектрическую фазу, что обеспечивает в результате релаксорный сегнетоэлектрик с электромеханической деформацией, большей, чем 7%, и плотностью упругой энергии, равной 0,7 Дж/см3 при 150 МВ/м. Дополнительно было описано, что посредством введения дефектов посредством высокоинтенсивного облучения электронами сополимеров P(VDF-TrFE), сополимер может быть также преобразован из «нормального» сегнетоэлектрического P(VDFTrFE) в сегнетоэлектрический релаксор.
Эти материалы могут быть образованы посредством синтеза полимеров, описанного в работе F. Carpi и др., "Dielectric Elastomers as Electromechanical Transducers: Fundamentals, Materials, Devices, Models and Applications of an Emerging Electroactive Polymer Technology," Oxford, Elsevier, 2011, стр. 53. Эта работа раскрывает комбинацию процесса суспензионной полимеризации и активируемого кислородом инициатора. Эти пленки могут быть образованы посредством наливания раствора на стеклянную подложку и затем испарения растворителя.
Необходимый наполнитель может быть добавлен в растворитель перед литьем пленки. После литья, композиционный материал может быть затем отожжен для удаления растворителя и увеличения степени кристалличности. Скорость кристаллизации может уменьшаться в зависимости от концентрации наполнителя и распределения частиц по размерам. Растяжение будет выравнивать молекулярные цепи и будет становиться более сложным, поскольку частицы могут прокалывать молекулярные цепи. Диэлектрическая проницаемость будет увеличиваться для большинства добавок, что будет уменьшать напряжение срабатывания, требуемое для достижения некоторой деформации. Жесткость материала будет увеличиваться, что будет уменьшать деформацию.
Процесс изготовления, таким образом, включает в себя образование раствора полимера, добавление частиц, смешивание, после чего следует литье (например, пленочное литье), потенциально, объединенное с ламинированием. Альтернативами являются нанесение покрытия методом центрифугирования, прессование и т.д.
Локальные изменения концентрации могут быть реализованы с использованием розлива с дозированием или трехмерной печати с растворителем. С использованием процессов трехмерной печати, возможны, например, толщины слоев между 10 и 20 мкм.
Во всех примерах, добавление наполнителя, в общем, оказывает влияние на напряжение пробоя. Максимальная деформация, которая может быть обеспечена с использованием электроактивного полимера, определяется максимальным напряжением, которое может быть приложено, которое является напряжением пробоя (или электрической прочностью диэлектрика).
Напряжение пробоя полимеров связано с диссоциацией молекул полимера под действием приложенного внешнего поля. Добавление частиц наполнителя в полимерную матрицу может оказывать значительное влияние на напряжение пробоя. В частности, большие частицы могут локально увеличивать поля. Таким образом, смешивание полимеров с частицами субмикронного диапазона оказывает меньшее отрицательное влияние на напряжение пробоя. Кроме того, структура границы раздела полимер - наполнитель может сильно влиять на напряжение пробоя.
Агломерация частиц является другим эффектом, который уменьшает напряжение пробоя. Однако, посредством модификации поверхностей частиц, предотвращающей агломерацию и улучшающей структуру границы раздела, может быть уменьшено негативное влияние на уровни напряжения пробоя. Однако полимеры с наполнителем будут иметь меньшую электрическую прочность диэлектрика, чем полимеры без наполнителя, что будет приводить к меньшей деформации срабатывания.
В заключение, для диэлектрических электроактивных полимеров, смешение с частицами может быть обеспечено с использованием большого множества промышленных технологий смешения и формования. Для сохранения ограниченного влияния на жесткость и, таким образом, на уменьшение величины перемещения исполнительного устройства, предпочтительны меньшие концентрации. Для заданной объемной концентрации, не слишком малые частицы также предпочтительны для сохранения ограниченного влияния на жесткость. Мягкий базовый полимер может быть выбран для компенсации увеличения жесткости. Увеличенная диэлектрическую проницаемость может обеспечить возможность срабатывания при уменьшенных напряжениях. Для сохранения электрической прочности диэлектрика, размер и концентрация частиц должны быть ограничены, и могут быть предприняты меры для улучшения границы раздела полимер - наполнитель, а также диспергирования частиц. Локальные изменения концентрации могут быть обеспечены посредством печати.
Для электроактивных полимеров релаксорного типа смешение с частицами также возможно. Подобные тенденции в отношении влияния концентрации и размера частиц на жесткость и электрическую прочность диэлектрика сравнимы с эффектами, описанными выше. Частицы могут быть добавлены после полимеризации. Растворенные полимеры могут формоваться с использованием различных технологий, таких как пленочное литье и нанесение покрытия методом центрифугирования. Также возможны локальные изменения концентрации.
Другие изменения раскрытых вариантов осуществления могут быть поняты и осуществлены специалистами в данной области техники при применении на практике заявленного изобретения, на основе изучения чертежей, раскрытия, и прилагаемой формулы изобретения. В формуле изобретения, слово «содержащий» не исключает другие элементы или этапы, а форма единственного числа не исключает множественного числа. Тот факт, что некоторые меры перечислены во взаимно отличающихся зависимых пунктах формулы изобретения, не указывает на то, что комбинация этих мер не может быть использована с преимуществом.
Никакие ссылочные позиции не следует толковать как ограничение объема настоящего изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| ИСПОЛНИТЕЛЬНОЕ УСТРОЙСТВО И СПОСОБ ДЛЯ НЕГО | 2017 |
|
RU2754722C2 |
| УПРАВЛЕНИЕ ЖЕСТКОСТЬЮ ДЛЯ ЭЛЕКТРОАКТИВНЫХ ИСПОЛНИТЕЛЬНЫХ УСТРОЙСТВ | 2017 |
|
RU2748051C2 |
| УЛЬТРАЗВУКОВОЕ ПРЕОБРАЗУЮЩЕЕ УСТРОЙСТВО И СПОСОБ УПРАВЛЕНИЯ ИМ | 2018 |
|
RU2769757C2 |
| УСТРОЙСТВО ПРИВОДА И СПОСОБ | 2017 |
|
RU2749570C2 |
| ИСПОЛНИТЕЛЬНОЕ УСТРОЙСТВО НА ОСНОВЕ ЭЛЕКТРОАКТИВНОГО МАТЕРИАЛА | 2018 |
|
RU2762347C2 |
| УЛЬТРАЗВУКОВОЕ УСТРОЙСТВО И АКУСТИЧЕСКИЙ КОМПОНЕНТ ДЛЯ ИСПОЛЬЗОВАНИЯ В ТАКОМ УСТРОЙСТВЕ | 2017 |
|
RU2756022C2 |
| ИСПОЛНИТЕЛЬНОЕ УСТРОЙСТВО, ВКЛЮЧАЮЩЕЕ В СЕБЯ ИСПОЛНИТЕЛЬНОЕ УСТРОЙСТВО НА ОСНОВЕ ЭЛЕКТРОАКТИВНОГО ПОЛИМЕРА, И СПОСОБ ВОЗБУЖДЕНИЯ | 2018 |
|
RU2764083C2 |
| ДВУНАПРАВЛЕННЫЙ ИСПОЛНИТЕЛЬНЫЙ МЕХАНИЗМ | 2016 |
|
RU2711243C2 |
| ИСПОЛНИТЕЛЬНОЕ И СЧИТЫВАЮЩЕЕ УСТРОЙСТВО НА ОСНОВЕ ЭЛЕКТРОАКТИВНОГО ПОЛИМЕРА | 2018 |
|
RU2753750C2 |
| ИСПОЛНИТЕЛЬНОЕ УСТРОЙСТВО НА ОСНОВЕ ЭЛЕКТРОАКТИВНОГО ПОЛИМЕРА | 2017 |
|
RU2730430C2 |
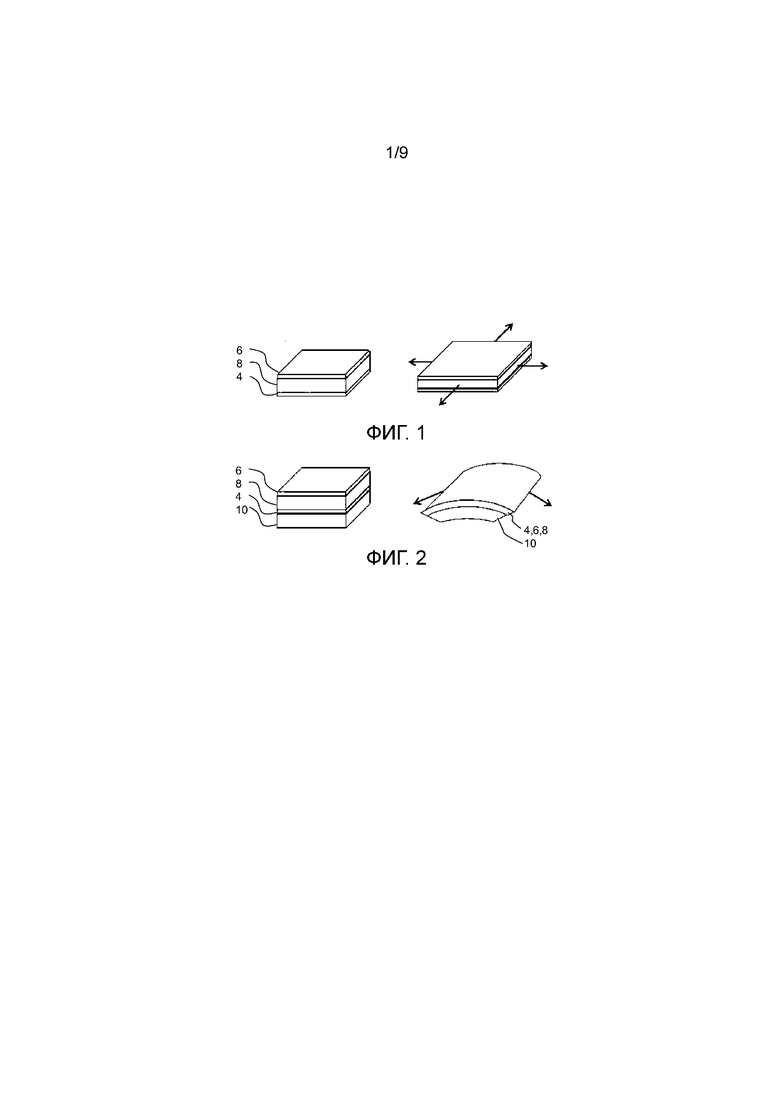

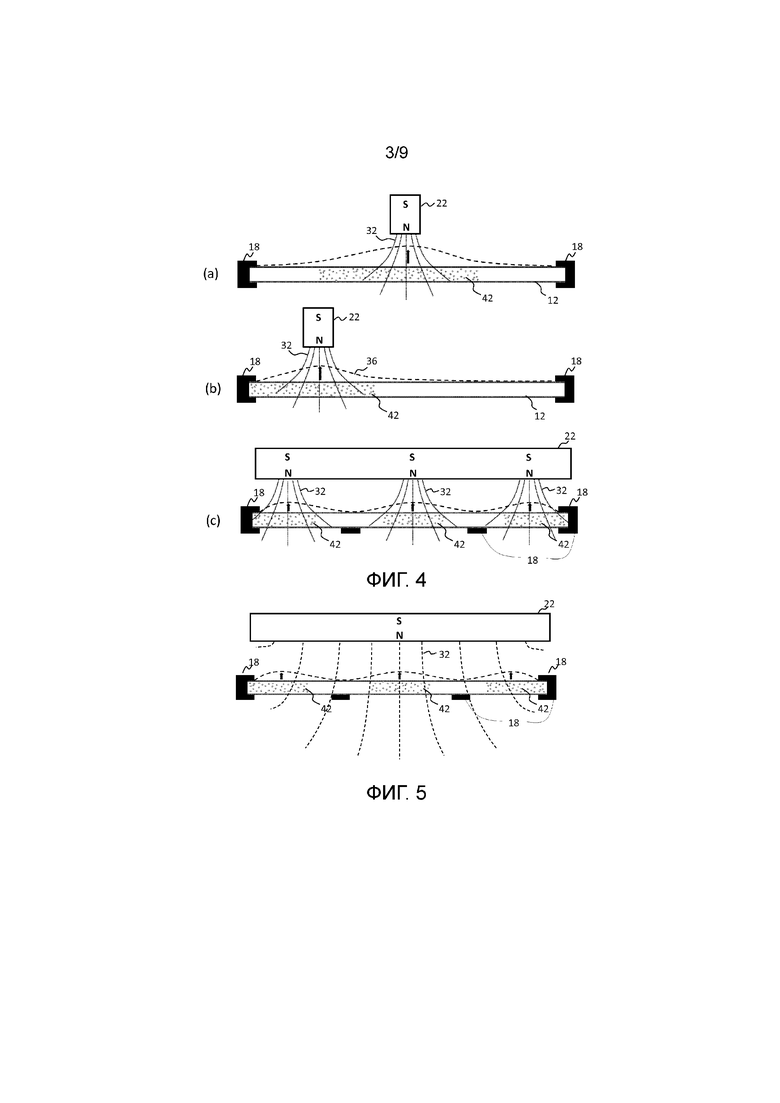



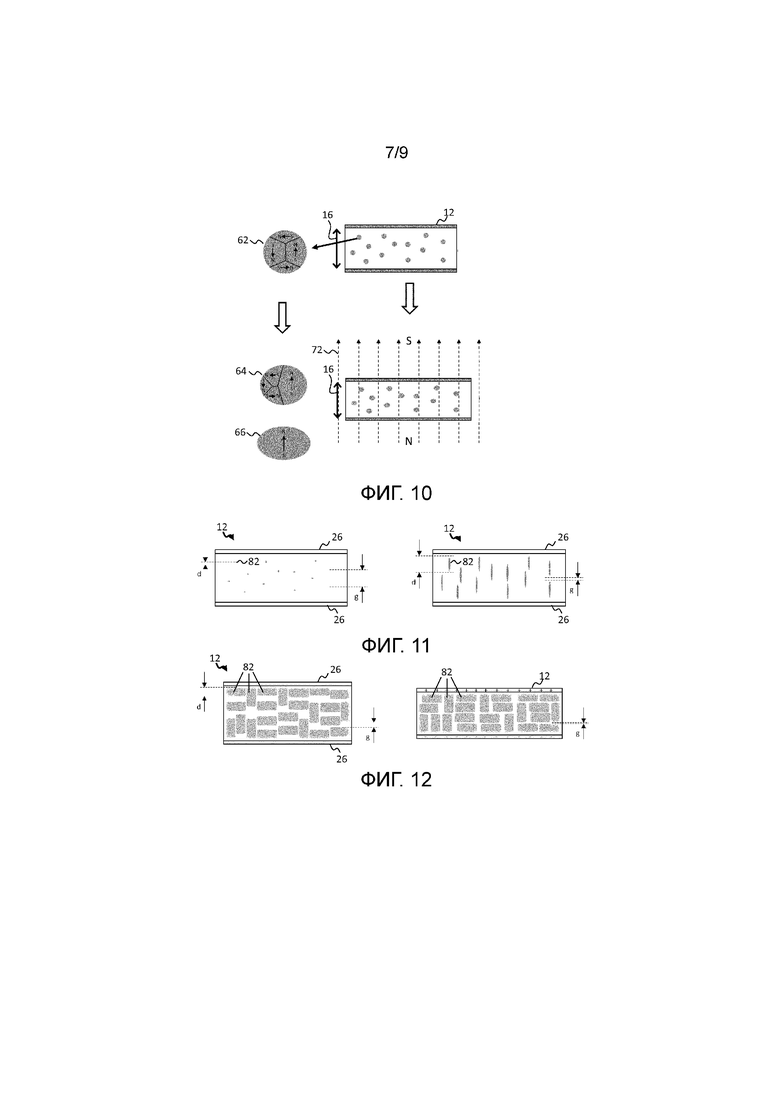
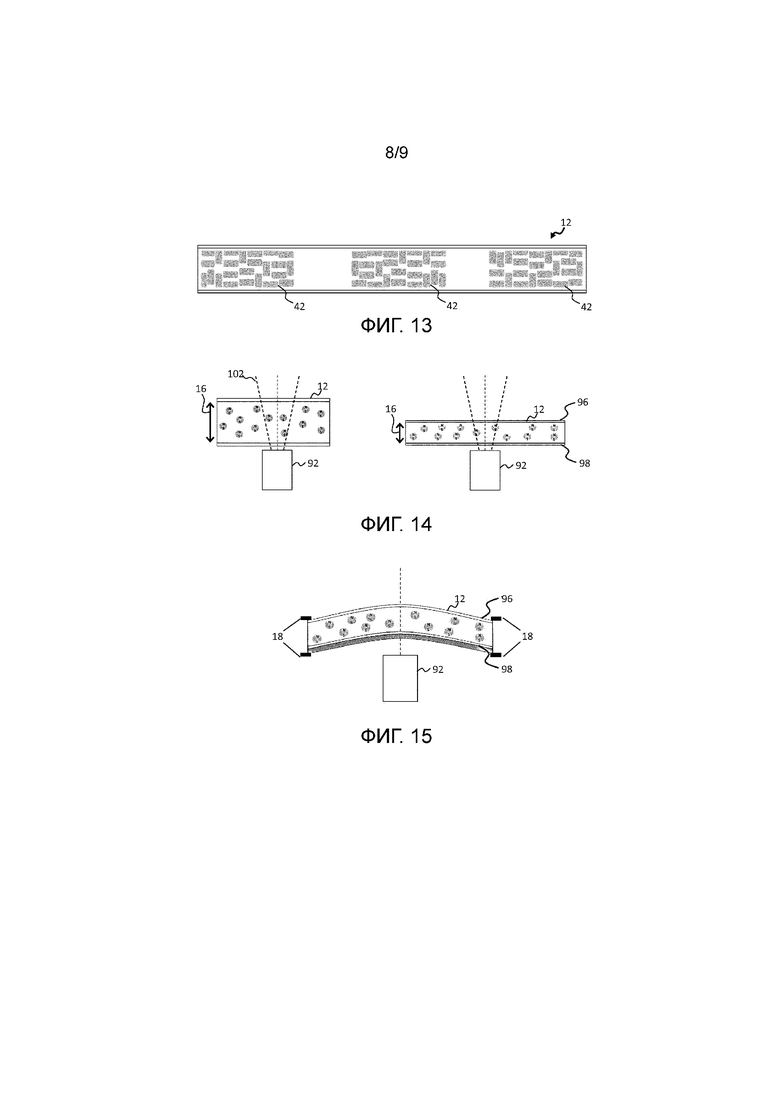

Настоящее изобретение относится, в общем, к исполнительным устройствам на основе электроактивных материалов (и исполнительным устройствам, объединенным с сенсорными устройствами), имеющим встроенные магнитные частицы для обеспечения улучшенных эффектов срабатывания и/или считывания. Техническим результатом при реализации заявленного решения является создание исполнительного устройства на основе электроактивных материалов, имеющего встроенные магнитные частицы для обеспечения улучшенных эффектов срабатывания и/или считывания. 2 н. и 13 з.п. ф-лы, 16 ил. 
1. Исполнительное устройство, содержащее:
- исполнительный элемент, имеющий некоторую толщину и содержащий:
электроактивный материал, выполненный с возможностью деформироваться в ответ на приложение электрического стимула; и
частицы магнитного материала, диспергированные в электроактивном материале;
- датчик магнитного поля, выполненный с возможностью детектировать напряженность магнитного поля в по меньшей мере некоторой секции исполнительного элемента или вблизи нее; и
- контроллер, выполненный с возможностью определять, на основе выходных данных датчика магнитного поля, указание на изменение формы исполнительного элемента.
2. Исполнительный элемент по п. 1, в котором контроллер выполнен с возможностью определять, на основе упомянутых выходных данных датчика магнитного поля, указание на изменение толщины исполнительного элемента.
3. Исполнительное устройство по п. 1 или 2, в котором контроллер выполнен с возможностью определять, на основе упомянутых выходных данных датчика магнитного поля, изменение напряженности магнитного поля, и определять упомянутое изменение формы исполнительного элемента на основе упомянутого определенного изменения напряженности поля.
4. Исполнительное устройство по любому предшествующему пункту, в котором контроллер дополнительно выполнен с возможностью создавать деформацию исполнительного элемента посредством приложения электрического стимула к исполнительному элементу и/или приложения магнитного поля к исполнительному элементу и, необязательно, в котором контроллер выполнен с возможностью создавать упомянутую деформацию одновременно с определением упомянутого изменения формы исполнительного элемента.
5. Исполнительное устройство по п. 4, в котором контроллер выполнен с возможностью управлять формой или степенью деформации, создаваемой в исполнительном элементе, в зависимости от упомянутого определенного изменения формы.
6. Исполнительное устройство по любому предшествующему пункту, в котором частицы являются частицами магнитно-жесткого материала и в котором контроллер выполнен с возможностью определять упомянутое указание на изменение формы исполнительного элемента на основе известного прямого или непрямого соотношения между детектированной напряженностью магнитного поля и формой исполнительного элемента.
7. Исполнительное устройство по п. 6, в котором контроллер содержит память и выполнен с возможностью определять упомянутое указание на изменение формы исполнительного элемента посредством предопределенной справочной таблицы, сохраненной в упомянутой памяти, причем справочная таблица хранит значения формы исполнительного элемента, связанные с каждой детектированной напряженностью магнитного поля.
8. Исполнительное устройство по любому из пп. 1-5, в котором частицы являются частицами магнитострикционного магнитного материала и в котором контроллер выполнен с возможностью определять упомянутое указание на изменение формы на основе определенного изменения демонстрируемой намагниченности исполнительного элемента.
9. Исполнительное устройство по п. 8, в котором контроллер выполнен с возможностью определять упомянутое указание на изменение формы на основе известного соотношения между изменением формы исполнительного элемента и изменением намагниченности, создаваемой частицами.
10. Исполнительное устройство по любому из пп. 1-5, в котором частицы являются частицами магнитно-мягкого материала и в котором контроллер выполнен с возможностью определять, на основе упомянутых выходных данных датчика магнитного поля, изменение магнитной проницаемости по исполнительному элементу и определять упомянутое указание на изменение формы исполнительного элемента на основе упомянутого определенного изменения магнитной проницаемости.
11. Исполнительное устройство по п. 10, в котором контроллер выполнен с возможностью определять указание на изменение толщины исполнительного элемента, и при этом упомянутое изменение толщины исполнительного элемента определяется на основе соотношения
μ=αNd/<g>,
где α является зависящей от материала постоянной, N является числом частиц на единицу площади сечения перпендикулярно толщине, d является размером каждой частицы в направлении, параллельном толщине, и <g> является средним взаимным расстоянием между частицами в направлении, параллельном толщине.
12. Исполнительное устройство по п. 10 или 11, в котором частицы имеют некруглосимметричное сечение.
13. Исполнительное устройство по любому из пп. 10-12, дополнительно содержащее средство генерирования магнитного поля для приложения магнитного поля к исполнительному элементу, и при этом датчик магнитного поля выполнен с возможностью детектировать напряженность упомянутого приложенного магнитного поля к исполнительному элементу.
14. Исполнительное устройство по любому предшествующему пункту, в котором частицы магнитного материала диспергированы неоднородно в исполнительном элементе для образования набора пространственно дискретных концентраций частиц, и при этом датчик магнитного поля содержит средство для независимого детектирования напряженности магнитного поля по каждой из упомянутых пространственно дискретных концентраций.
15. Способ считывания изменения формы исполнительного элемента, причем упомянутый исполнительный элемент содержит:
электроактивный материал, выполненный с возможностью деформироваться в ответ на приложение электрического стимула, и
частицы магнитного материала, диспергированные в электроактивном материале,
причем упомянутый способ содержит этапы, на которых:
принимают входные данные от датчика магнитного поля, выполненного с возможностью детектировать напряженность магнитного поля в по меньшей мере некоторой секции исполнительного элемента или вблизи нее, и
определяют, на основе упомянутых входных данных от датчика магнитного поля, указание на изменение формы исполнительного элемента.
| JP 2009005436 A, 08.01.2009 | |||
| US 2010079032 A1, 01.04.2010 | |||
| ЭЛЕКТРОАКТИВНЫЙ ПОЛИМЕРНЫЙ АКТЮАТОР | 2011 |
|
RU2568944C2 |
| US 2011133676 A1, 09.06.2011 | |||
| US 7259503 B2, 21.08.2007. | |||

