ОБЛАСТЬ ТЕХНИКИ
Это изобретение относится к устройству привода, в частности, к устройству привода, содержащему электроактивный материал.
УРОВЕНЬ ТЕХНИКИ
Электроактивные материалы (ЭАМ) и, в частности, электроактивные полимеры (ЭАП) представляют собой перспективный класс материалов в области электрочувствительных материалов. ЭАП могут работать как датчики или приводы, и при изготовлении им могут быть легко приданы различные формы, позволяющие простую интеграцию в разнообразные системы.
Были разработаны материалы с характеристиками, такими как механическое напряжение и натяжение активации привода, которые значительно улучшились за последние десять лет. Технологические риски были снижены до допустимых уровней для разработки продукта, и ЭАП приобрели возрастающий интерес в коммерческом и техническом плане. Преимущества ЭАП включают в себя малую мощность, миниатюрный форм-фактор, гибкость, бесшумную работу, точность, возможность высокого разрешения, быстрый отклик и циклическую активацию привода.
Улучшенные рабочие характеристики и особые преимущества материалов ЭАП служат основанием для их пригодности для новых применений.
ЭАП-устройство может использоваться в любом применении, в котором желательным является небольшая величина перемещения компонента или элемента на основе электрической активации привода. Аналогичным образом, технология может использоваться для восприятия малых движений.
Использование ЭАП делает возможными функции, которые не были возможны прежде, или предлагает существенное преимущество перед обычными решениями для приводов благодаря комбинации относительно большой деформации и силы в небольшом объеме или тонком форм-факторе по сравнению с обычными приводами. ЭАП также обеспечивают бесшумную работу, точное электронное управление, быстрый отклик и большой спектр возможных частот активации привода, такой как 0-1 МГц, как правило ниже 20 кГц.
Устройства, использующие электроактивные полимеры, могут быть подразделены на управляемые полем и ионно-управляемые материалы.
Примеры управляемых полем ЭАП включают в себя пьезоэлектрические полимеры, электрострикционные полимеры (такие как полимеры-релаксоры на основе PVDF) и диэлектрические эластомеры. Другие примеры включают в себя электрострикционные привитые полимеры, электрострикционную бумагу, электреты, электровязкоупругие эластомеры и жидкокристаллические эластомеры.
Примерами ионно-управляемых ЭАП являются сопряженные/проводящие полимеры, ионные полимер-металлические композиты (IPMC) и углеродные нанотрубки (CNT). Другие примеры включают в себя ионные полимерные гели.
Управляемые полем ЭАП приводятся в действие электрическим полем через прямую электромеханическую связь. Они обычно требуют сильных полей (десятки мегавольт на метр), но низких токов. Полимерные слои обычно являются тонкими, чтобы поддерживать управляющее напряжение насколько возможно низким.
Ионные ЭАП приводятся в действие посредством индуцированного электрическим полем переноса ионов и/или растворителя. Они обычно требуют низких напряжений, но сильных токов. Им требуется жидкая/гелевая электролитная среда (хотя некоторые системы материалов также могут работать с использованием твердых электролитов).
Оба класса ЭАП имеют несколько подклассов, каждый из которых имеет собственные преимущества и недостатки.
Первым примечательным подклассом управляемых полем ЭАП, являются пьезоэлектрические и электрострикционные полимеры. В то время как электромеханические рабочие характеристики традиционных пьезоэлектрических полимеров ограничены, прорыв в улучшении этих рабочих характеристик привел к полимерам-релаксорам PVDF, которые проявляют самопроизвольную электрическую поляризацию (управляемое полем выравнивание). Эти материалы могут быть подвергнуты предварительному натяжению для улучшения рабочих характеристик в направлении натяжения (предварительное натяжение приводит к более хорошему молекулярному выравниванию). Обычно используются металлические электроды, поскольку натяжения обычно находятся в умеренном режиме (1-5%). Также могут использоваться другие типы электродов (такие как проводящие полимеры, масла, гели или эластомеры на основе сажистого углерода и т.д.). Электроды могут быть непрерывными или сегментированными.
Другим подклассом управляемых полем ЭАП является подкласс диэлектрических эластомеров. Тонкая пленка этого материала может быть помещена между гибкими электродами, формируя конденсатор с параллельными пластинами. В случае диэлектрических эластомеров напряжение Максвелла, индуцированное приложенным электрическим полем, приводит к напряжению на пленке, заставляя ее сжаться по толщине и расшириться по площади. Рабочие характеристики натяжения, как правило, увеличиваются посредством предварительного натяжения эластомера (требуется рамка для поддержания предварительного натяжения). Натяжения могут быть значительными (10-300%). Это также ограничивает тип электродов, которые могут использоваться: для низких и умеренных натяжений, могут рассматриваться металлические электроды и проводящие полимерные электроды, для режима высоких натяжений обычно используются масла, гели или эластомеры на основе сажистого углерода. Электроды могут быть непрерывными, или сегментированные.
Первым примечательным подклассом ионных ЭАП являются ионные полимер-металлические композиты (IPMC). IPMC состоят из мембраны из набухающего при растворении ионообменного полимера, нанесенной между двумя тонкими электродами на основе металла или углерода, и требуют использования электролита. Типичными материалами электрода являются Pt, Gd, CNT, CP, Pd. Типичными электролитами являются водные растворы Li+ и Na+. При приложении поля катионы обычно перемещаются в сторону катода вместе с водой. Это приводит к реорганизации гидрофильньных кластеров и к расширению полимера. Натяжение в области катода приводит к давлению в остальной части полимерной матрицы, приводящему к изгибу в сторону анода. Изменение полярности приложенного напряжения меняет направление изгиба. Известными полимерными мембранами являются Nafion® и Flemion®.
Другим примечательным подклассом ионных полимеров являются сопряженные/проводящие полимеры. Привод на сопряженных полимерах обычно состоит из электролита, помещенного между двумя слоями сопряженного полимера. Электролит используется для изменения степени окисления. Когда к полимеру прикладывается потенциал через электролит, электроны добавляются к полимеру или удаляются из полимера, приводя к окислению и восстановлению. Восстановление приводит к сокращению, окисление - к расширению.
В некоторых случаях добавляются тонкопленочные электроды, когда самому полимеру не хватает достаточной проводимости (по размеру). Электролит может представлять собой жидкость, гель или твердый материал (т.е., комплекс высокомолекулярных полимеров и солей металла). Наиболее распространенными спряженными полимерами являются полипиррол (PPy), полианилин (PANi) и политиофен (PTh).
Привод также может быть сформирован из углеродных нанотрубок (CNT), подвешенных в электролите. Электролит формирует двойной слой с нанотрубками, давая возможность инжекции зарядов. Эта инжекция заряда в двойной слой рассматривается как первичный механизм в приводах CNT. CNT действует как конденсатор электрода с зарядом, инжектированным в CNT, который затем уравновешивается электрическим двойным слоем, сформированным движением электролитов к поверхности CNT. Изменение заряда на атомах углерода приводит к изменениям длины связи C-C. В результате может наблюдаться расширение и сокращение отдельной CNT.
Фиг. 1 и 2 показывают два возможных режима работы для ЭАП-устройства.
Устройство содержит электроактивный полимерный слой 8, помещенный между электродов 4, 6 на противоположных сторонах электроактивного полимерного слоя 8.
Фиг. 1 показывает устройство, которое не зажато. Напряжение используется, чтобы заставить электроактивный полимерный слой расширяться во всех направлениях, как показано.
Фиг. 2 показывает устройство, которое сконструировано таким образом, что расширение возникает только в одном направлении. Устройство поддерживается несущим слоем 10. Напряжение используется, чтобы заставить электроактивный полимерный слой изгибаться или наклоняться.
Совместно электроды, электроактивный полимерный слой и несущий слой могут рассматриваться как составляющие полную электроактивную полимерную структуру.
Природа этого движения, например, является результатом взаимодействия между активным слоем, который расширяется, когда активируется, и пассивным несущим слоем. Чтобы получить асимметричный изгиб вокруг оси, как показано, может быть применена молекулярная ориентация (растяжение пленки), вынуждающая к движению в одном направлении.
Расширение в одном направлении может являться результатом асимметрии в полимере ЭАП, или оно может являться результатом асимметрии в свойствах несущего слоя, или комбинации обеих.
Описанная выше электроактивная полимерная структура может использоваться и для активации привода, и для восприятия. Наиболее значимые механизмы восприятия основаны на измерении силы и обнаружении натяжения. Диэлектрические эластомеры, например, могут быть легко растянуты внешней силой. Посредством подачи низкого напряжения на датчик натяжение может быть измерено как функция напряжения (напряжение является функцией площади).
Другой способ восприятия с помощью управляемых полем систем измеряет изменение емкости непосредственно или измеряет изменение сопротивления электрода как функцию натяжения.
Пьезоэлектрические и электрострикционные полимерные датчики могут формировать электрический заряд в ответ на приложенное механическое напряжение (учитывая, что величина кристалличности достаточно высока, чтобы формировать обнаружимый заряд). Сопряженные полимеры могут использовать пьезоионный эффект (механическое напряжение приводит к напряжению ионов). CNT испытывают изменение заряда на поверхности CNT, когда подвергаются механическому напряжению, и это может быть измерено. Было также показано, что сопротивление CNT изменяется при контакте с газообразными молекулами (например, O2, NO2), что делает CNT применимыми в качестве газовых детекторов.
Механические приводы в целом могут быть охарактеризованы с точки зрения определенного набора комбинации натяжения и напряжения, которую они могут реализовать в своих рабочих характеристиках приведения в действие. Этот диапазон достижимых комбинаций натяжения и напряжения ограничен собственными свойствами привода, и в результате возможные применения для привода будут ограничены.
Для приводов из электроактивного материала было бы желательно расширить диапазон достижимых комбинаций натяжения и напряжения, и тем самым расширить возможное применение для технологии. Улучшение этой области до сих пор было достижимым только посредством построения сложных составных структур привода, сформированных из комбинаций нескольких ЭАП-приводов, соединенных вместе. Такие структуры являются сложными для изготовления, имеют большой форм-фактор и могут требовать значительной дополнительной электроники для управления. Это само по себе ограничивает диапазон применения для этих решений.
В дополнение к ограничениям по рабочим характеристикам привода современные ЭАП-приводы также ограничены достижимыми рабочими характеристиками восприятия. Известно, что степень активации привода ЭАП-привода может быть обнаружена через суперпозицию воспринимающего сигнала AC с низкой амплитудой на сигнал возбуждения привода. Однако рабочие характеристики восприятия с использованием этих способов являются ограниченными. В частности, отношение сигнала к шумовому ЭАП является несколько ограничивающим, и как следствие применения, требующие высокой степени точности при измерениях обратной связи, как правило, требуют обеспечения дополнительных датчиков.
Было известно, что это увеличивает ЭАП-привод дополнительным выделенным слоя восприятия, чтобы обеспечить возможность более точных измерений восприятия. Однако это является добавкой к сложности и форм-фактору привода, и также может привести к потенциальному ухудшению срока службы привода вследствие отслаивания слоя восприятия в результате частых циклов активации привода.
Таким образом, в целом ведется поиск приводов и способов на основе ЭАМ, которые способны предложить улучшенные рабочие характеристики активации привода и/или способны предложить улучшенное восприятие обратной связи относительно степени деформации привода.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
В области устройств привода более широко известно встраивание магнитных частиц в пассивную матрицу полимера, чтобы обеспечить устройство, способное к различным деформациям для обеспечения эффектов активации привода. Однако диапазон движений активации привода и силы, достижимы с помощью таких устройств, как известно, ограничен.
Документ US 2009/0165877 описывает несколько устройств привода для использования в микрожидких системах. В одном наборе вариантов осуществления приводы выполнены с возможностью деформироваться в ответ на приложение электрического поля. Они могут содержать электроактивный полимерный материал, чтобы обеспечить возможность этого эффекта. В отдельном наборе вариантов осуществления приводы выполнены с возможностью откликаться на приложение магнитного поля. Они могут содержать магнитные частицы, чтобы обеспечить возможность этой функциональности.
В области магнитных датчиков также хорошо известно использование магнитных частиц, встроенные в матрицу из пьезоэлектрического материала, чтобы позволить воспринимать напряженности магнитного поля. Например, документ JP 2000038643 раскрывает магнитный датчик, изготовленный посредством диспергирования откликающихся на магнитное поле частиц в пьезоэлектрической матрице. Изменения магнитной энергии индуцируют механический отклик в магнитных частицах, которые затем прикладывают механические напряжения к пьезоэлектрической матрице. Эти механические напряжения могут быть обнаружены в индуцированных вследствие этого пьезоэлектрических токах.
Авторы изобретения обнаружили, что с подходящими модификациями может быть возможно включить некоторые из этих эффектов в область устройств из электроактивного материала, чтобы улучшить функциональность активации привода или восприятия.
Изобретение определено посредством формулы изобретения.
Изобретение в целом относится к приводам из электроактивного материала, включающим в себя магнитные частицы для обеспечения улучшенных эффектов активации привода и/или восприятия. Признаки любых из изложенных ниже примеров могут успешно сочетаться.
В соответствии с примерами обеспечено устройство привода, содержащее:
элемент привода, содержащий
электроактивный материал, выполненный с возможностью деформироваться в ответ на приложение электрического стимула; и
частицы мягкого магнитного материала, диспергированные в электроактивном материале;
средство формирования магнитного поля, выполненное с возможностью формировать магнитное поле с конфигурируемой диаграммой направленности по напряженности поля для приложения к элементу привода;
средство формирования электрического стимула; и
контроллер, выполненный с возможностью управлять средством формирования магнитного поля и средством формирования электрического стимула скоординированным образом, тем самым реализуя один или более шаблонов деформации в элементе привода.
Эти примеры основаны на концепции включения мягких магнитных частиц в элемент из электроактивного материала, чтобы тем самым обеспечить привод, который включает в себя свойства и электрического, и магнитного отклика. Эти две функциональности используются в примерах, чтобы обеспечить эффекты активации привода, которые простираются за пределы достигнутых или достижимых с помощью современных устройств, использующих только один или другой эффект.
Электроактивный материал (ЭАМ) в соответствии с конкретными примерами может представлять собой электроактивный полимерный материал (ЭАП).
Контроллер выполнен с возможностью обеспечивать скоординированное управление средства формирования электрического стимула и средства формирования магнитного поля, чтобы тем самым индуцировать одну или более форм деформации, конфигурации или действия в элементе привода. В примерах контроллер может быть выполнен с возможностью обеспечивать скоординированное управление двух средств, чтобы тем самым индуцировать программу одной или более форм деформации, конфигураций или действий в элементе привода.
Скоординированное управление может включать в себя активацию двух средств одновременно и/или может включать в себя активацию двух средств последовательно. Например, контроллер может быть выполнен с возможностью в соответствии по меньшей мере с одним режимом работы активировать магнитное поле и электрическое поле вместе, чтобы тем самым обеспечить в элементе привода составную деформацию, например, имеющую повышенную магнитуду, или достигнуть сравнимую с такой, которая достижима с использованием одной лишь либо электрической, либо магнитной стимуляции.
Дополнительно или в качестве альтернативы контроллер может быть выполнен с возможностью в соответствии по меньшей мере с одним режимом работы активировать два средства одновременно, чтобы обеспечить в элементе привода конкретную форму или шаблон деформации, имеющие дополнительную степень сложности или особенности по сравнению с формами, которые могли бы быть достижимы с использованием лишь единственных средств стимуляции.
Например, два средства могут быть использованы вместе, чтобы обеспечить составную форму активации привода, сформированную из базовой деформации (например, такой как однородный изгиб в пределах всего элемента, вызванный, например, электрической стимуляцией), на которую наложена дополнительная локальная деформация (индуцированная, например, через магнитную стимуляцию частиц по меньшей мере в локальной области элемента привода). Таким образом, примеры способны обеспечить новые эффекты активации привода, которые простираются за границы ранее достижимых.
Посредством дополнительного примера в соответствии с одним или более примерами средства формирования магнитного поля и формирования электрического поля могут управляться в последовательном шаблоне активации, чтобы обеспечить одну или более форм или эффектов активации привода. Последовательное управление может быть использовано, чтобы обеспечить прогрессию разных конкретных форм или конфигураций активации привода, и/или может использоваться, чтобы обеспечить динамические эффекты активации привода, такие как волнообразное или колебательное поведение. Такие последовательности электрической и/или магнитной стимуляции могут сформировать программу шаблонов деформации, которые контроллер выполнен с возможностью индуцировать.
Комбинация магнитных частиц с ЭАП-материалом, таким образом, эффективно обеспечивает дополнительную степень свободы при управлении деформацией элемента привода. Это может успешно использоваться, чтобы достигнуть более сложных или более механически сильных движений и эффектов активации привода.
Средство формирования электрического стимула в качестве примера может представлять собой набор электродов для приложения электрического поля в пределах по меньшей мере фрагмента элемента привода. В качестве альтернативы средство может включать в себя источник тока, электрически соединенный с элементом привода для обеспечения электрического тока в пределах по меньшей мере фрагмента элемента привода.
Средство формирования магнитного поля в качестве примера может представлять собой управляемый магнит (т.е., электромагнит). Дополнительно или в качестве альтернативы средство может включать в себя электропроводную катушку для переноса циркулирующего электричества для установления магнитного поля. Это может быть, например, соленоид. В некоторых примерах катушка может быть намотана вокруг по меньшей мере фрагмента элемента привода. В альтернативных примерах катушка может быть размещена смежным образом с фрагментом элемента привода.
Во всех примерах средство формирования магнитного поля выполнено с возможностью формировать поле с конфигурируемой диаграммой направленности по напряженности поля, под которым более широко понимается магнитное поле, имеющее конфигурируемые величины векторного поля в пределах пространства, простирающегося через по меньшей мере фрагмент элемента привода. Магнитное векторное поле часто представляется рядом линий магнитного поля, которые указывают направленность поля в конкретной области пространства. Линии магнитного поля могут быть конфигурируемыми в соответствии с примерами.
В соответствии с одним или более примерами контроллер может быть выполнен с возможностью индуцировать любой предопределенный набор шаблонов деформации в элементе привода. Например, контроллер может иметь память, содержащую программные команды для реализации в элементе привода любого множества различных режимов или конфигураций активации привода. Эти программные команды могут включать в себя конкретные параметры настройки или комбинации команд для управления средством формирования электрического стимула и средством формирования магнитного поля скоординированным образом. Эти программные команды могут включать в себя инструкции для управления средством формирования электрического стимула и средством формирования магнитного поля, для совместной работы и раздельной работы, например, последовательным образом.
В соответствии с одним или более примерами контроллер может быть выполнен с возможностью исполнять предопределенный план управления для управления деформацией элемента привода, план управления включает в себя этапы для управления и средством формирования электрического стимула, и средством формирования магнитного поля, и при необходимости упомянутый план управления включает в себя этапы, зависящие от одного или более входных параметров.
Входные параметров могут в соответствии с одним или более примерами включать в себя одну или более команд пользовательского ввода. Команды пользовательского ввода могут быть приняты от одного или более блоков пользовательского интерфейса и могут включить в себя команды, указывающие конкретный один или больше режимов управления, которые должны быть исполнены, или указывающие один или более шаблонов деформации, которые должны быть реализованы, или могут просто использоваться для инициирования активации или деактивации привода (в любом диапазоне режимов управления).
Дополнительно или в качестве альтернативы входные параметры могут включать в себя параметры, полученные или принятые от одного или более устройств датчика или элементов восприятия. Элементы восприятия могут включать в себя, например, компоненты для определения степени активации привода, например, такие, которые будут описаны более подробно в соответствии с дополнительными примерами концепции изобретения.
Термин "мягкий" магнитный материал обозначает в широком смысле магнитные материалы, которые проявляют обратимое намагничивание. Они в целом имеют свойство становиться намагниченными при воздействии магнитного поля, но теряют упомянутое намагничивание после удаления магнитного поля. Это контрастирует с так называемыми твердыми магнитными материалами, которые проявляют длительное или постоянное намагничивание даже в отсутствие приложенного внешнего магнитного поля.
В соответствии с одним или более конкретными примерами частицы мягкого магнитного материала могут содержать по меньшей мере один из: мягкий ферромагнитный материал, парамагнитный материал и суперпарамагнитный материал.
В соответствии с одним или более наборами примеров мягкий магнитный материал может представлять собой магнитострикционный материал для реализации сокращения или расширения элемента привода в ответ на приложение магнитного поля средством формирования магнитного поля.
В конкретных примерах этих примеров средство формирования магнитного поля может быть выполнено с возможностью формировать магнитное поле с однородной напряженностью поля для приложения в пределах элемента привода. Под однородной напряженностью поля понимается наличие напряженности поля, которая независима от позиции, и, в частности, которая является одинаковой всюду по протяженности тела элемента привода. Однородное магнитное поле по-другому известно как гомогенное магнитное поле.
В присутствии магнитного поля с однородной напряженностью поля магнитострикционные частицы не испытывают магнитную силу притяжения или отталкивания, но стимулируются магнитным полем, чтобы измениться или деформироваться по форме или размеру. Эта деформация частиц приводит к соответствующей деформации окружающей матрицы электроактивного материала и тем самым элемента привода в целом. В макро-масштабе эти индуцированные магнитным полем деформации приводят к расширению или сокращению элемента привода.
В дополнительных примерах средство формирования магнитного поля может быть выполнено с возможностью формировать магнитное поле с неоднородной напряженностью магнитного поля для приложения в пределах элемента привода. Под неоднородной напряженностью магнитного поля понимается напряженность поля, которая изменяется по зависимости от позиции, и, в частности, которая изменяется в пределах тела элемента привода.
В частности, в данном случае поле может проявлять снижение напряженности поля в направлении (направлениях) от средства формирования магнитного поля, например, как функцию расстояния от средства формирования магнитного поля. Неоднородное поле по-другому может быть известно как пространственно неоднородное магнитное поле.
В присутствии любого магнитного поля (однородного или неоднородного) мягкий магнитный материал стимулируется, чтобы проявить намагничивание, параллельное и направленное в том же самом направлении, как упомянутое приложенное магнитное поле. В присутствии неоднородного магнитного поля, в частности, любая намагниченная частица будет испытывать суммарную силу в результате дисбаланса сил, действующих на ее два "полюса". В данном случае мягких магнитных частиц, в котором намагничивание каждой частицы параллельно и одинаково ориентировано с приложенным магнитным полем, каждая частица испытывает суммарную силу в направлении (положительного) градиента поля в местоположении частицы. Когда напряженность магнитного поля уменьшается в направлениях от средства формирования магнитного поля (как в настоящем примере), каждая мягкая магнитная частица будет испытывать силу притяжения к средству формирования магнитного поля.
Следовательно, посредством приложения неоднородного магнитного поля в соответствии с описываемыми примерами магнитные частицы испытывают силу притяжения к средству формирования магнитного поля. Соответствующим образом управляя средством формирования магнитного поля, чтобы стимулировать магнитные поля с конкретными диаграммами направленности по напряженности поля, в элементе привода могут быть произведены конкретные шаблоны деформации. В частности, в примерах можно побудить элемент привода изогнуться или деформироваться в направлении средства формирования магнитного поля (в частности, если элемент привода зажат на каждом конце).
Согласно этому в соответствии с одним или более примерами контроллер может быть выполнен с возможностью индуцировать изгиб по меньшей мере во фрагменте элемента привода в заданном направлении, управляя средством формирования магнитного поля, чтобы сформировать магнитное поле с неоднородной напряженностью магнитного поля, имеющее линии магнитного поля, простирающиеся через элемент привода в направлении, антипараллельном упомянутому заданному направлению изгиба.
В соответствии с одним или более примерами магнитные частицы могут быть подвешены в капельках полимера в электроактивном материале, капельки полимера имеют вязкость ниже, чем вязкость электроактивного материала. В этом случае капельки следуют за любой индуцированной электрическим полем деформацией элемента привода, но не мигрируют через ЭАП-матрицу после приложения магнитного поля. Эти два материала могут быть не смешивающимися. Эффектом обеспечения таких капелек может быть сокращенное сопротивление в элементе привода против деформации ЭАП-матрицы. Это вызвано тем, что после деформации ЭАП частицы полимера могут деформироваться, не подвергаясь значительному сопротивлению против окружающего ЭАП. Это отличается от системы, в которой магнитные частицы непосредственно встроены в ЭАП-матрицу. В последнем случае частицы оказывают частичное сопротивление против деформации ЭАП, поскольку молекулы ЭАП должны мигрировать (сдвигаться) вдоль поверхности частиц. Сдвиг против капелек также возникает, но поскольку вязкость этих капелек значительно ниже, чем у полимера ЭАП, частичное сопротивление против деформации меньше.
В соответствии с одним или более наборами примеров частицы мягкого магнитного материала могут быть неоднородно диспергированы в элементе привода, чтобы достигнуть неоднородных шаблонов деформации.
В частности, частицы в примерах могут быть размещены в наборе пространственно раздельных концентраций в элементе привода. Предпочтительно в этих случаях электроактивный материал имеет такую вязкость, чтобы предотвратить миграцию частиц через материал после оказания магнитной силы магнитным полем средства формирования магнитного поля.
Средство формирования магнитного поля в этих случаях может быть выполнено с возможностью формировать магнитное поле, имеющее разные напряженности магнитного поля в пределах каждого упомянутого набора пространственно раздельных концентраций. Контроллер может быть выполнен с возможностью в соответствии с конкретным режимом управления управлять средством формирования магнитного поля, чтобы формировать упомянутое магнитное поле с разными напряженностями магнитного поля. Таким образом, разные локальные фрагменты или области элемента привода можно побудить деформироваться до разных степеней или в разных шаблонах или конфигурациях.
Следовательно, в этих примерах достижимы более сложные и особенные шаблоны активации привода и действия. В частности, когда это локализованное управление деформацией объединено со стимулируемой электрическим полем деформацией, реализуем широкий объем возможных шаблонов деформации и движений активации привода и действий. Таким образом, это значительно расширяет объем возможного применения для обеспеченных элементов привода, а также расширяет их рабочие характеристики в рамках уже установленных приложений.
В примерах в соответствии с дополнительным примером обеспечен способ активации привода, способ использует элемент привода, содержащий:
электроактивный материал, выполненный с возможностью деформироваться в ответ на приложение электрического стимула; и
частицы мягкого магнитного материала, диспергированные в электроактивном материале;
и способ содержит:
управление средством формирования магнитного поля, выполненным с возможностью формировать магнитное поле с конфигурируемой диаграммой направленности по напряженности поля, и средством формирования электрического стимула скоординированным образом, чтобы тем самым реализовать один или более шаблонов деформации в элементе привода.
В соответствии с аспектом изобретения обеспечено устройство привода, содержащее:
элемент привода, содержащий
электроактивный материал, выполненный с возможностью деформироваться в ответ на приложение электрического стимула; и
частицы твердого магнитного материала, диспергированные в электроактивном материале и упорядоченные таким образом, что по меньшей мере фрагмент элемента привода проявляет намагничивание в заданном направлении;
средство формирования магнитного поля, выполненное с возможностью формировать магнитное поле с конфигурируемой диаграммой направленности по напряженности поля для приложения в пределах по меньшей мере фрагмента элемента привода;
средство формирования электрического стимула; и
контроллер, выполненный с возможностью управлять средством формирования магнитного поля и средством формирования электрического стимула скоординированным образом, тем самым реализуя один или более шаблонов деформации в элементе привода.
Варианты осуществления обеспечиваемого изобретения основано на концепции сходной с концепцией описанных выше примеров, а именно, заключение откликающихся на магнитное поле частиц в тело элемента из электроактивного материала. Примеры в соответствии с этим аспектом изобретения, однако, используют твердые магнитные частицы, а не мягкие магнитные частицы. Твердые магнитные частицы, как разъяснено выше, характеризуются проявлением постоянного намагничивания, которое не зависит от внешне приложенного магнитного поля. Это вносит широкий спектр новых возможностей и вариантов для управления деформацией элемента привода, чтобы достигнуть новых и интересных шаблонов активации привода и эффектов.
В частности, варианты осуществления изобретения позволяют создать неоднородные шаблоны деформации копирует в пределах элемента привода, т.е., локально переменные шаблоны деформации.
Согласно этому в соответствии с одним или более вариантами осуществления,
средство формирования магнитного поля может быть выполнено с возможностью формировать магнитное поле с неоднородной напряженностью поля для приложения в пределах элемента привода; и/или
частицы твердого магнитного материала могут быть неоднородно диспергированы в элементе привода;
таким образом, чтобы в любом случае достигнуть неоднородного шаблона деформации в пределах элемента привода.
В примерах может быть достигнут неоднородный шаблон деформации, когда неоднородность проявляется вдоль заданного измерения, посредством формирования магнитного поля, имеющего напряженность поля, которая неоднородна вдоль этого измерения.
Как и в изложенных ранее в примерах, скоординированное управление может включать в себя активацию двух средств одновременно и/или может включать в себя активацию двух средств последовательно.
Контроллер в примерах может быть выполнен с возможностью индуцировать любой предопределенный набор шаблонов деформации в элементе привода.
Контроллера в соответствии с одним или более наборами вариантов осуществления может быть выполнен с возможностью исполнить предопределенный план управления для управления деформацией элемента привода, план управления включает в себя этапы для управления и средством формирования электрического стимула, и средством формирования магнитного поля, и при необходимости упомянутый график управления включает в себя этапы, зависящие от одного или более входных параметров. Входные параметры могут являться командами пользовательского ввода.
В соответствии с одним или более конкретными примерами частицы твердого магнитного материала могут содержать по меньшей мере один из материалов: твердый ферромагнитный материал; ферритовый материал, SmCo и NdFeB.
Как и в ранее описанных примерах, твердый магнитный материал может являться магнитострикционным материалом для реализации сокращения или расширения элемента привода в ответ на приложение магнитного поля средством формирования магнитного поля.
В конкретных примерах этих вариантов осуществления средство формирования магнитного поля может быть выполнено с возможностью формировать магнитное поле с однородной или неоднородной напряженностью магнитного поля для приложения в пределах элемента привода, причем эти термины следует понимать, как определено выше.
В присутствии магнитного поля с однородной напряженностью магнитного поля магнитострикционные частицы не испытывают магнитную силу притяжения или отталкивания, но стимулируются магнитным полем, чтобы измениться или деформироваться по форме или размеру. Эта деформация частиц приводит к соответствующей деформации окружающей матрицы электроактивного материала и тем самым элемента привода в целом. В макро-масштабе эти индуцированные магнитным полем деформации приводят к расширению или сокращению элемента привода.
В присутствии магнитного поля с неоднородной напряженностью магнитного поля (например, с уменьшающейся напряженностью от средства формирования магнитного поля) твердый магнитный материал испытывает суммарную силу. Направление силы зависит от направления его собственного намагничивания. В частности, если намагничивание твердых магнитных частиц будет параллельным и одинаково ориентированным с приложенным магнитным полем, то магнитные частицы испытают силу в направлении (положительного) градиента напряженности магнитного поля в местоположении частицы. Когда напряженность магнитного поля уменьшается в направлениях от средства формирования магнитного поля, частицы в этом случае будут испытывать силу притяжения к средству формирования магнитного поля.
Наоборот, если намагничивание твердых магнитных частиц будет направлено противоположно к общему направлению магнитного поля, частицы испытают магнитную силу в направлении, противоположном направлению градиента поля в местоположении частицы. Снова в предположении, что магнитное поле уменьшается в направлениях от средства формирования магнитного поля, магнитные частицы в этом случае испытают силу отталкивания, отталкивающую их от средства формирования магнитного поля.
Следовательно, в вариантах осуществления настоящего изобретения достижима двунаправленная деформация, поскольку направление отклонения частиц может быть различным в зависимости от направления приложенного магнитного поля. В частности, разными фрагментами элемента привода можно управлять таким образом, чтобы отклонять их либо к средству формирования магнитного поля, либо от средства формирования магнитного поля в зависимости от направления, в котором линии поля, формированные средством формирования поля, пересекают упомянутые фрагменты.
В частности, контроллер в примерах может быть выполнен с возможностью реализовывать изгиб элемента привода в направлении, антипараллельном направлению намагничивания упомянутых по меньшей мере фрагментов элемента привода, управляя средством формирования магнитного поля, чтобы сформировать магнитное поле с неоднородной напряженностью магнитного поля, имеющее линии магнитного поля, простирающиеся через элемент привода по существу в том же направлении, как и намагничивание.
Дополнительно или в качестве альтернативы контроллер в примерах может быть выполнен с возможностью реализовывать изгиб элемента привода в направлении, параллельном направлению намагничивания упомянутых по меньшей мере фрагментов элемента привода, управляя средством формирования магнитного поля, чтобы сформировать магнитное поле с неоднородной напряженностью магнитного поля, имеющее линии магнитного поля, простирающиеся через элемент привода в направлении, по существу противоположном направлению намагничивания.
Поле может иметь напряженность поля, в частности, которая является неоднородной вдоль направления, параллельного упомянутому направлению намагничивания и/или упомянутому направлению линий магнитного поля. Напряженность поля может, в частности, уменьшаться в направлении, по существу противоположном направлению намагничивания.
Неоднородная деформация элемента привода в примерах может быть достигнута, неоднородность проявляется в заданном направлении, через приложение поля, имеющего напряженность поля, которая неоднородна в упомянутом направлении.
В соответствии с одним или более вариантами осуществления контроллер может быть выполнен с возможностью реализовывать противоположно направленный изгиб по меньшей мере в двух соседних фрагментах элемента привода, управляя средством формирования магнитного поля, чтобы сформировать и приложить в пределах элемента привода магнитное поле с неоднородной напряженностью поля, имеющее линии магнитного поля, простирающиеся по упомянутым соседним фрагментам в соответственно противоположных параллельных направлениях в отношении направления намагничивания элемента привода. В соответствии с этими примерами соседними фрагментами можно управлять, чтобы проявить отклонение или деформацию (например, изгиб) в разных соответствующих направлениях в отношении средства формирования магнитного поля. Это достигается посредством приложения магнитного поля в пределах этих соответствующих фрагментов с разными направленностями.
Под соответственно противоположными параллельными направлениями понимается, что линии поля в пределах обоих фрагментов ориентированы параллельно или по существу параллельно направлению намагничивания, но направлены противоположно друг другу, например, линии поля в одном фрагменте направлены параллельно направлению намагничивания, и линии поля в другом фрагменте направлены антипараллельно направлению намагничивания.
В конкретных примерах этих вариантов осуществления контроллер может быть выполнен с возможностью последовательно активировать магнитные поля для каждого из упомянутых соответствующих соседних фрагментов и тем самым реализовывать волнообразное движение в элементе привода. Волнообразное или виляющее движение достижимо посредством управления противоположно направленным отклонением каждого набора соседних фрагментов, чтобы активировать их последовательно по одному, а не одновременно все разом. Такое волнообразное движение может быть полезным или выгодным в диапазоне приложений, например, в микрожидких системах для продвижения или перемещения текучей среды, для достижения некоторых механических эффектов "смазывания", или для достижения проталкивания или движения любого твердого или жидкого тела, захваченного волнообразной поверхностью элемента привода.
В соответствии с одним или более наборами вариантов осуществления частицы твердого магнитного материала могут быть диспергированы неоднородно в элементе привода, чтобы достигнуть неоднородных шаблонов деформации.
В частности, частицы в примерах могут быть размещены в наборе пространственно раздельных концентраций в элементе привода.
Средство формирования магнитного поля в этих случаях может быть выполнено с возможностью формировать магнитное поле, имеющее разные напряженности магнитного поля в пределах каждого упомянутого набора пространственно раздельных концентраций. Контроллер может быть выполнен с возможностью в соответствии с конкретным режимом управления управлять средством формирования магнитного поля, чтобы формировать упомянутое магнитное поле с разными напряженностями магнитного поля. Таким образом, разные локальные фрагменты или области элемента привода модно побудить деформироваться до разной степени в различных направлениях, или с различными шаблонами или конфигурациями.
Следовательно, в этих вариантах осуществления достижимы более сложные и особенные шаблоны активации привода и действия. В частности, когда это локализованное управление деформацией объединено со стимулируемой электрическим полем деформацией, осуществим широкий объем возможных шаблонов деформации и движений активации привода. Таким образом, это значительно расширяет объем возможного применения для обеспеченных элементов привода, а также расширяет их рабочие характеристики в рамках уже установленных приложений.
Примеры в соответствии с дополнительным аспектом изобретения обеспечивают способ активации привода, способ использует элемент привода, содержащий:
электроактивный материал, выполненный с возможностью деформироваться в ответ на приложение электрического стимула, и
частицы твердого магнитного материала, диспергированные в электроактивном материале и упорядоченные таким образом, что по меньшей мере фрагмент элемента привода проявляет намагничивание в заданном направлении,
и способ, содержащий:
управление средством формирования магнитного поля, действующим, чтобы формировать магнитное поле с конфигурируемой диаграммой направленности по напряженности поля и средство формирования электрического стимула скоординированным способом, чтобы тем самым реализовать один или несколько шаблонов деформации в элементе привода.
В соответствии с примерами обеспечено устройство привода, содержащее:
элемент привода, имеющий толщину и содержащий
электроактивный материал, выполненный с возможностью деформироваться в ответ на приложение электрического стимула; и
частицы магнитного материала, диспергированные в электроактивном материале;
датчик магнитного поля, выполненный с возможностью обнаруживать напряженность магнитного поля внутри или вблизи по меньшей мере фрагмента элемента привода; и
контроллер, выполненный с возможностью определять на основе выводов от датчика магнитного поля показатель относительно изменения формы элемента привода.
Эти примеры основаны на использовании магнитных частиц, встроенных в элемент из электроактивного материала, чтобы обеспечить устройства привода, имеющие некоторые собственные функциональные возможности восприятия. В частности, этими примерами можно управлять, чтобы обеспечить точный показатель относительно аспекта изменения формы элемента привода в реальном времени и согласованно с электрической стимуляцией элемента привода. Таким образом, примеры в соответствии по меньшей мере с некоторыми случаями могут обеспечить обратную связь в реальном времени относительно степени деформации элемента привода (как воплощено в изменении формы элемента). Эта функциональность восприятия в примерах может быть успешно включена в изложенные выше варианты осуществления и/или объединена с изложенными выше примерами, как будет описано более подробно в последующих абзацах.
Контроллер в соответствии с одним или более описываемыми примерами может быть выполнен с возможностью определять показатель относительно изменения толщины элемента привода. Например, элемент привода может иметь слой как структуру, содержащую противостоящие главные поверхности. В этом случае толщина должна пониматься как размер элемента привода, простирающийся между двумя главными поверхностями в направлении, перпендикулярном каждой из них. Однако в более общем случае толщина может относиться к любому произвольному размеру элемента привода, но может более обычно относиться к более малому или наименьшему размеру из трех измерений любого элемента привода, обеспеченного в соответствии с этими примерами.
Хотя ниже будут описаны концепции относительно измерения изменения толщины элемента привода, следует понимать, что в дополнительных примерах концепции могут быть без затруднений применены к определению других аспектов изменения формы. Посредством неограничивающего примера они могут включать в себя изменения ширины, высоты или длины элемента привода или изменения искривления или топологии элемента привода. Изменения формы в дополнительных примерах могут включать в себя изменения общего профиля или контура элемента привода. Это может быть достигнуто, например, посредством применения описанных ниже способов или этапов определения ко множеству разных фрагментов элемента привода и обработки результатов для определения, каким образом изменились общая форма или профиль элемента привода.
В соответствии по меньшей мере одним подмножеством примеров контроллер может быть выполнен с возможностью определять на основе упомянутых выводов из датчика магнитного поля изменение напряженности магнитного поля и определять упомянутое изменение в форме элемента привода на основе упомянутого определенного изменения напряженности поля. Это определение может быть основано на известном прямом или косвенном соотношении между этими двумя значениями, например. Определение может быть основано на уравнении или выражении, соотносящем два значения, или в альтернативных примерах, например, может быть основано на использовании таблицы поиска, доступной контроллеру для выполнения определения.
В соответствии по меньшей мере с одним подмножеством примеров контроллер может быть дополнительно выполнен с возможностью индуцировать деформацию элемента привода посредством приложения электрического стимула к элементу привода и/или приложения магнитного поля к элементу привода. Контроллер в соответствии с этими примерами, таким образом, выполнен с возможностью управлять и активацией привода, и поведением восприятия привода. Управление активацией привода элемента привода может включать в себя стимулируемую магнитным полем деформацию и/или стимулируемую электрическим полем деформацию. Восприятие обратной связи в примерах может быть получено контроллером совместно с управлением деформации электрическим и/или магнитным средствами. В частности, контроллер может быть выполнен с возможностью индуцировать упомянутую деформацию одновременно с определением упомянутого изменения формы элемента привода.
Приложение упомянутого электрического стимула может быть достигнуто посредством дополнительного включения в устройстве привода средства формирования электрического стимула. В качестве альтернативы контроллер может быть функционально соединен или соединим с внешним средством формирования электрического стимула. Стимул в примерах может представлять собой электрический ток или может в дополнительных примерах представлять собой электрическое поле.
В соответствии с одним или более примерами контроллер может быть выполнен с возможностью управлять формой или степенью деформации, индуцированной в элементе привода, в зависимости от упомянутого определенного изменения формы. Собственные функциональные возможности восприятия настоящих примеров, таким образом, могут использоваться, чтобы непосредственно информировать управление деформацией элемента привода. Например, контроллер может быть выполнен с возможностью по меньшей мере в одном режиме управления продолжать увеличивать приложенное напряжение срабатывания, пока не будет достигнута конкретная пороговая толщина (или другой порог размера или порог формы) элемента привода. В этот момент контроллер может быть выполнен с возможностью поддерживать напряжение на фиксированном уровне, чтобы поддержать таким образом достигнутый уровень деформации. Дополнительные примеры будут описаны более подробно в последующих разделах.
Во всех случаях настоящего основного набора примеров контроллер выполнен с возможностью обеспечивать по меньшей мере показатель относительно изменения формы (например, толщина) элемента привода. Показатель в некоторых примерах может состоять в числовом определении аспекта изменения его формы. В качестве альтернативы показатель может состоять в некоторой другой переменной или параметре, которые могут обеспечить косвенную меру или показатель относительно изменения формы.
В некоторых примерах контроллер может быть выполнен с возможностью идентифицировать на основе выводов из датчика магнитного пол, показатель относительно толщины элемента привода. В этих примерах получается показатель относительно общей или абсолютной толщины элемента привода получен, а не просто показатель относительно изменения толщины. Это может быть числовой показатель абсолютной толщины или в качестве альтернативы может содержать некоторое другое значение или параметр, прямо или косвенно коррелированный с толщиной.
Как отмечено выше, функциональность восприятия, обеспеченная в этом наборе примеров, может быть успешно объединена или включена в изложенные выше варианты осуществления изобретения и/или объединена с изложенными выше примерами. В частности, магнитные частицы могут являться твердыми магнитными частицами или мягкими магнитными частицами, и могут включать в себя магнитострикционные частицы. Конкретные примеры, относящиеся к каждому из этих вариантов, будут теперь кратко изложены.
В соответствии по меньшей мере с одним подмножеством примеров частицы могут являться частицами твердого магнитного материала, причем контроллер выполнен с возможностью определять упомянутый показатель относительно изменения формы элемента привода на основе известного прямого или косвенного отношения между обнаруженной напряженностью магнитного поля и формой элемента привода.
В конкретных примерах контроллер может содержать память и может быть выполнен с возможностью определять упомянутый показатель относительно изменения формы элемента привода посредством предопределенной таблицы поиска, сохраненной в упомянутой памяти, таблица поиска хранит значения для формы элемента привода (например, толщину), ассоциированные с каждой обнаруженной напряженностью магнитного поля.
В качестве альтернативы контроллер может быть выполнен с возможностью определять изменение обнаруженной напряженности магнитного поля за данный интервал времени, и таблица поиска хранит значения изменения формы, ассоциированные с диапазоном возможных обнаруженных изменений напряженности магнитного поля. Измеренное изменение напряженности поля затем может быть идентифицировано в таблице поиска, и тем самым определяется соответствующее изменения формы.
В соответствии по меньшей мере с одним подмножеством примеров частицы могут являться частицами магнитострикционного магнитного материала, причем контроллер выполнен с возможностью определять упомянутый показатель относительно изменения формы на основе определенного изменения проявленного намагничивании элемента привода. Магнитострикционные частицы, как правило, характеризуются проявлением намагничивания (либо постоянного, либо индуцированного полем), которое меняется или колеблется предсказуемым способом в ответ на приложение сил или натяжений. Посредством отслеживания изменения проявленного намагничивания с использованием датчика магнитного поля возможно определить показатель относительно изменения формы на основе известных свойств материала элемента привода, например, на основе известной упругости или иначе на основе известного соотношения между изменениями формы привода и индуцированными механическими напряжениями в теле материала элемента привода.
В соответствии с этим контроллер выполнен с возможностью определять упомянутый показатель относительно изменения формы на основе известного отношения между изменением формы элемента привода и изменением намагничивания, индуцированным частицами.
В соответствии по меньшей мере с одним подмножеством примеров частицы могут являться частицами мягкого магнитного материала, причем контроллер выполнен с возможностью определять на основе упомянутых выводов из датчика магнитного поля изменения магнитной проницаемости в пределах элемента привода и определять упомянутый показатель относительно изменения формы элемента привода, основанный на упомянутом определенном изменении магнитной проницаемости.
В частности, изменение толщины элемента привода в соответствии с одним или более примерами может быть определено на основе отношения
μ=αNd/<g> (1)
где α - зависящая от материала константа, N - количеством частиц на единицу площади поперечного сечения, перпендикулярного толщине, d - размер каждой частицы в направлении, параллельном толщине, и <g> - средний промежуток между частицами в направлении, параллельном толщине.
Если элемент привода деформирован в направлении, параллельном толщине (например, через приложение электрического стимула), размер промежутка <g> изменяется, поскольку частицы становятся либо прижатыми ближе друг другу (в случае сжатия), либо оттянутыми дальше друг от друга (в случае расширения). Это изменение промежутка может быть измерено в полученном изменении магнитной проницаемости в соответствии с приведенным выше отношением (1).
Конкретные обнаруженные изменения магнитной проницаемости могут быть соотнесены контроллером с соответствующими изменениями формы элемента привода (например, толщины) с использование таблицы поиска. В качестве альтернативы это может быть вычислено контроллером на основе определенных изменений <g> (выведенных из измеренных изменений μ), и на основе известного отношения между формой привода и <g>. Это может быть экспериментально выведенное отношение, конкретное для заданного рассматриваемого элемента привода, или в качестве альтернативы может являться теоретически выведенным отношением.
В соответствии с одним или более примерами частицы могут иметь некруглое симметричное поперечное сечение. В более общем случае частицы могут иметь соотношение сторон, больше 1, т.е., могут иметь поперечное сечение с размером по длине больше, чем размер по ширине. Эта асимметрия помогает расширить чувствительность материала к приложенным деформациям с точки зрения проявленного изменения магнитной проницаемости: меньшее изменение формы приводит к большему отклику с точки зрения изменения магнитной проницаемости. Это может улучшить точность определенных изменений формы привода.
Магнитная проницаемость в примерах может быть определена посредством измерения вспомогательного магнитного поля H, индуцированного в пределах элемента привода в ответ на приложение внешнего магнитного поля B. Из частного от деления B на H непосредственно следует магнитная проницаемость (т.е., B=μH).
В соответствии с этим устройство привода в соответствии с одним или более примерами может дополнительно содержать средство формирования магнитного поля для приложения магнитного поля в пределах элемента привода, и датчик магнитного поля выполнен с возможностью обнаруживать напряженность упомянутого приложенного магнитного поля в пределах элемента привода. Магнитное поле может быть измерено магнитной регистрирующей головкой или датчиком Холла, например.
В примерах контроллер может быть функционально соединен с упомянутым средством формирования магнитного поля и выполнен с возможностью управлять средством, чтобы приложить упомянутое магнитное поле к элементу привода.
Кроме того, в конкретных случаях из этого подмножества примеров электроактивный материал может иметь вязкость, достаточную для предотвращения миграции частиц через материал после приложения магнитной силы посредством магнитного поля средства формирования магнитного поля. Это гарантирует согласованное распределение частиц в пределах элемент привода, и тем самым гарантируется, что измеренные изменения магнитной проницаемости могут быть достоверно соотнесены с соответствующим изменением формы элемента привода.
В примерах частицы магнитного материала могут быть диспергированы неоднородно в элементе привода, чтобы сформировать набор пространственно раздельных концентраций частиц, и датчик магнитного поля содержит средство для независимого обнаружения напряженности магнитного поля в пределах каждой из упомянутых пространственно раздельных концентраций.
Это может позволить для более тонкие или особенные способности восприятия, причем изменения формы (например, толщины) разных фрагментов элемента привода могут быть измерены независимо. В частности, например, это может быть полезно в случаях, когда элемент привода выполнен с возможностью быть деформируемым в соответствии с неоднородными шаблонами деформации. В этих случаях разными фрагментами элемента привода можно управлять, чтобы они принимали разные конкретные формы или конфигурации, чтобы тем самым обеспечить более особенный общий шаблон деформации. Здесь восприятие изменения толщины, например, в пределах каждого из этих индивидуальных фрагментов может быть, в частности, выгодным, например, при обеспечении обратной связи для управления элементом привода.
Дополнительно или в качестве альтернативы такая составная способность восприятия может позволить определять изменения более сложных аспектов формы элемента привода, таких как изменения общего профиля элемента. При отслеживании, каким образом каждая серия последовательных фрагментов элемента изменяет толщину или длину, например, возможно определить, как изменяется общая схема или профиль элемента.
В примерах в соответствии с дополнительными примерами также обеспечен способ восприятия изменения формы элемента привода, элемента привода содержит:
электроактивный материал, выполненный с возможностью деформироваться в ответ на приложение электрического стимула, и
частицы магнитного материал, диспергированные в электроактивном материале,
и способ содержит:
прием вводов от датчика магнитного поля, выполненного с возможностью обнаруживать напряженность магнитного поля внутри или вблизи по меньшей мере фрагмента элемента привода, и
определение на основе упомянутых вводов от датчика магнитного поля показателя относительно изменения формы элемента привода.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Теперь будут подробно описаны примеры со ссылкой на приложенные схематические чертежи:
Фиг. 1 показывает известное электроактивное полимерное устройство, которое не зажато;
Фиг. 2 показывает известное электроактивное полимерное устройство, которое ограничено подложкой;
Фиг. 3 схематично иллюстрирует иллюстративное устройство привода;
Фиг. 4 схематично иллюстрирует дополнительное иллюстративное устройство привода;
Фиг. 5 схематично иллюстрирует активацию иллюстративного устройства привода, показанного на фиг. 4, с помощью единственного магнитного поля, а не нескольких магнитных полей;
Рис. 6 схематично иллюстрирует магнитные частицы, взвешенные в капельке полимера и диспергированные в ЭАП-матрице;
Фиг. 7 схематично иллюстрирует фрагмент иллюстративного элемента привода;
Фиг. 8 схематично иллюстрирует иллюстративный элемент привода;
Фиг. 9 схематично иллюстрирует дополнительный иллюстративный элемент привода;
Фиг. 10 схематично иллюстрирует иллюстративный элемент привода, содержащий магнитострикционные частицы;
Фиг. 11 схематично иллюстрирует иллюстративный элемент привода, содержащий мягкие магнитные частицы;
Фиг. 12 схематично иллюстрирует дополнительный иллюстративный элемент привода, содержащий мягкие магнитные частицы;
Фиг. 13 схематично иллюстрирует дополнительный иллюстративный элемент привода, содержащий мягкие магнитные частицы;
Фиг. 14 схематично иллюстрирует иллюстративный элемент привода, содержащий твердые магнитные частицы;
Фиг. 15 схематично иллюстрирует иллюстративный элемент привода, содержащий твердые магнитные частицы; и
Фиг. 16 схематично иллюстрирует иллюстративный элемент привода, содержащий магнитострикционные частицы.
ПОДРОБНОЕ ОПИСАНИЕ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ
Изобретение в целом относится к приводам из электроактивного материала, содержащим, например, электроактивный полимер, имеющий встроенные магнитные частицы для обеспечения улучшенной активации привода и/или эффектов восприятия.
Примеры представляют устройство привода, включающее в себя элемент привода EAM, имеющий встроенные мягкие магнитные частицы и дополнительно включающий в себя средство для приложения электрического стимула и магнитного поля к элементу привода. Контроллер выполнен с возможностью управлять этими двумя средствами скоординированным образом, чтобы тем самым реализовать один или более шаблонов деформации в элементе привода.
Примеры представляют устройство привода, включающее в себя элемент привода EAM, имеющий встроенные твердые магнитные частицы и дополнительно включающий в себя средство для приложения электрического стимула и магнитного поля к элементу привода. Контроллер выполнен с возможностью управлять этими двумя средствами скоординированным образом, чтобы тем самым реализовать один или более шаблонов деформации в элементе привода.
Примеры представляют устройство привода, включающее в себя элемент привода EAM, имеющий встроенные магнитные частицы и дополнительно включающий в себя датчик магнитного поля для обнаружения напряженности магнитного поля внутри или вблизи тела элемента привода. Контроллер выполнен с возможностью определять на основе выходной информации от датчика магнитного поля показатель относительно изменения формы элемента привода. Контроллер, в частности, может определить изменение толщины элемента привода. В конкретных вариантах осуществления определенное изменение формы может использоваться в качестве информации обратной связи при управлении шаблоном деформации элемента привода.
Фиг. 3 иллюстрирует первое иллюстративное устройство привода. Устройство содержит элемент 12 привода, имеющее толщину 16 и содержащее электроактивный полимерный материал, включающий в свой состав множество диспергированных магнитных частиц. Элемент привода зажат с обоих концов соответствующим зажимом 18. Два зажима направляют любое боковое расширение элемента привода внутрь из изнутри изгиба плоскости или деформации.
Вблизи элемента 12 привода размещено средство 22 формирования магнитного поля, выполненное с возможностью формировать магнитное поле, имеющее линии магнитного поля, проходящие в пределах тела элемента привода. Средство формирования магнитного поля может содержать управляемый электромагнит, такой как соленоид, в форме электропроводной катушки или обмотки. Средство формирования магнитного поля в качестве альтернативы может являться постоянным магнитом, хотя это может не являться предпочтительным, поскольку это потребовало бы дополнительного средства для физического перемещения магнита к и от элемента привода, чтобы изменить напряженность приложенного магнитного поля (или полностью прекратить приложение поля).
Хотя средство формирования магнитного поля показано смещенным от элемента привода на фиг. 3, в дополнительных примерах средство формирования магнитного поля может быть размещено в контакте с элементом привода. В соответствии с одним или более примерами средство формирования магнитного поля может содержать катушку, катушка обмотана вокруг по меньшей мере фрагмента элемента 12 привода.
Устройство привода далее содержит пару электродов 26, прикрепленных к противоположным главным поверхностям элемента 12 привода. В качестве примера электроды могут быть наслоены на каждую из упомянутых главных поверхностей. В качестве альтернативы также может использоваться любое другое средство фиксации или крепления. Подходящее средство для соединения электродов с элементом привода будет очевидно специалисту в области техники.
Пара электродов 26 обеспечивает средство формирования электрического стимула для формирования и приложения электрического стимула к электроактивному полимерному материалу элемента 12 привода и тем самым индуцирования деформации элемента привода. В частности, электроды выполнены с возможностью прикладывать электрическое поле в пределах толщины 16 элемента привода. Электроактивный полимерный материал может в этом случае представлять собой управляемый полем электроактивный полимерный материал, такой как эластомер или другой подходящий управляемый полем электроактивный полимерный материал (подходящие примеры изложены выше, а также в дальнейших абзацах ниже).
Хотя в этом конкретном примере средство формирования электрического стимула обеспечено в форме пары электродов 26, в дополнительных примерах средство может дополнительно или в качестве альтернативы быть обеспечено для приложения электрического тока. Оно может включать в себя, например, пару электрических контактов, электрически соединенных с элементом привода в паре соответствующих точек на элементе привода. В этих случаях электроактивный полимерный материал может представлять собой ионный электроактивный полимер в соответствии с примерами, описанными выше, или в дополнительных последующих абзацах ниже.
Устройство привода дополнительно содержит контроллер 30, функционально соединенный со средством 22 формирования магнитного поля и парой 26 электродов, и выполненный с возможностью управлять двумя средствами скоординированным образом, чтобы реализовать программу одного или более шаблонов деформации в элементе 12 привода. В конкретном примере на фиг. 3 контроллер электрически соединен со средством формирования магнитного поля и парой электродов и выполнен с возможностью реализовывать управление двумя средствами посредством подачи управляемого электрического тока или напряжения каждому средству. Посредством управления электрическим током или напряжением, поданным средству формирования электрического поля, магнитуда приложенного поля может быть различной. Посредством управления электрическим напряжением, подаваемом на пару электродов 26, также можно управлять напряженностью электрического поля, индуцированного в пределах толщины 16 элемента 12 привода.
В дополнительных примерах средство 22 формирования магнитного поля может быть дополнительно снабжено отдельным выделенным источником питания, причем контроллер 30 выполнен с возможностью управлять напряженностью или диаграммой направленности магнитного поля, сформированного средством 22 посредством передачи команд управления через функциональное соединение.
В соответствии с описываемым примером магнитные частицы, диспергированные в ЭАП-материале, представляют собой частицы мягкого магнитного материала. Однако следует понимать, что структура устройства привода, проиллюстрированного на фиг. 3, полностью совместима с элементом 12 привода, который содержит мягкие магнитные частицы или твердые магнитные частицы. Конкретные примеры, включающие твердые магнитные частицы, будут описаны более подробно в последующих абзацах.
Элемент 12 привода для настоящего примера содержит электроактивный полимерный материал, смешанный с мягкими магнитными частицами, тем самым формируя композит ЭАП. Мягкие магнитные частицы должны пониматься как частицы, которые обратимо намагничиваемы посредством внешнего приложенного магнитного поля, и которые по существу теряют свое намагничивание (почти немедленно) после удаления внешнего приложенного поля. Мягкие магнитные частицы могут в конкретных примерах представлять собой мягкие ферромагнитные частицы, парамагнитные частицы или суперпарамагнитные частицы, например.
Фиг. 3 (a) показывает элемент 12 привода в неработающем, не приведенном в действие состоянии.
Фиг. 3(b) показывает элемент 12 привода после приложения магнитного поля 32 к элементу привода посредством средства 22 формирования магнитного поля. В настоящем примере средство формирования магнитного поля выполнено с возможностью прикладывать магнитное поле, имеющее неоднородную напряженность магнитного поля, и, в частности, поле, напряженность которого уменьшается в направлениях от полюса средства формирования магнитного поля.
Как описано в предыдущем разделе, после приложения любого магнитного поля к мягкому (пара)магнитному материалу, материал становится намагниченным, собирающим намагничивание в направлении, совпадающем с направлением приложенного магнитного поля (т.е., с намагничиванием источника 22 поля). В настоящем примере каждая магнитная частица становится намагниченной в направлении, совпадающем с приложенным магнитным полем.
Когда приложенное магнитное поле имеет градиент напряженности поля, ориентированный в направлении к источнику поля, это индуцирует суммарную магнитную силу притяжения между таким образом намагниченным магнитным материалом и источником приложенного магнитного поля. Это вызвано тем, что неоднородное поле проявляет градиент магнитуды между двумя соответствующими полюсами каждой намагниченной частицы, тем самым приводя к неустойчивости в силах притяжения и отталкивания, испытываемых соответственно каждой из них. Поле является более сильным на индуцированном южном полюсе частицы (сверху с точки зрения фиг. 3), чем на северном полюсе. Следовательно, сила притяжения на южном полюсе (притягиваемом к полюсу N магнитного источника 22) является более сильной, чем сила отталкивания на северном полюсе (отталкиваемом полюсом N магнитного источника 22). Следовательно, имеется суммарное притяжение к средству 22 формирования магнитного поля.
Как показано на фиг. 3(b), после приложения магнитного поля 32 индуцированная таким образом сила притяжения между частицами и средством 22 формирования магнитного поля индуцирует деформацию в элементе привода. В частности, в элементе привода индуцируется изгиб 36 в направлении средства формирования магнитного поля.
Фиг. 3(c) показывает элемент 12 привода после одновременного приложения магнитного поля и электрического поля в пределах толщины 16 элемента привода. Как показано, комбинация этих двух стимулов индуцирует сходный изгиб элемента 12 привода, но с амплитудой или магнитудой, значительно увеличенной по сравнению с изгибом, индуцированным посредством одной лишь магнитной стимуляции. Приложение электрического поля посредством электродов 26 побуждает электроактивный полимерный материал деформироваться из плоскости (вследствие зажимов 18). Эта деформация, индуцированная электрическим полем, объединяется с магнитной деформацией и создает повышенный общий отклик активации привода.
Теперь будут подробно описаны несколько разных режимов управления для средства формирования магнитного поля со ссылкой на сопроводительные фигуры. Для простоты на фигурах, представленных для иллюстрации этих режимов управления, средство формирования электрического стимула и контроллер не показаны. Однако для каждой прилагаемой фигуры и примера следует понимать, что устройство привода, воплощающее описанный иллюстративный режим управления, на самом деле содержит упомянутые отсутствующие признаки, и что контроллер во всех случаях будет выполнен с возможностью производить один или несколько шаблонов деформации посредством скоординированного управления средством формирования электронного стимула и средством формирования магнитного поля. Скоординированное управление, как разъяснено выше, может включать в себя синхронное и/или последовательное управление.
В примере фиг. 3 обеспечены мягкие магнитные частицы, диспергированные по существу однородно в пределах элементу привода. Однако в дополнительных примерах магнитные частицы могут быть распределены неоднородно. В примерах это делает возможным реализацию неоднородного шаблона деформации.
Фиг. 4(a) показывает первый пример. Здесь магнитные частицы локально сконцентрированы в центральной области 42, и окружающие области не имеют магнитных частиц. Впоследствии, после активации магнитного поля 32 только эта центральная область 42 испытывает силу притяжения к средству 22 формирования магнитного поля. Это индуцирует более локализованную форму деформации. В частности, индуцированный изгиб или деформация могут простираться или покрывать только более малый центральный фрагмент элемента привода, в отличие от равномерного распространения в пределах всего элементу привода.
Дополнительно или в качестве альтернативы размещение частиц, показанное на фиг. 4(a), позволяет индуцировать с помощью магнитного поля изгиб элемента привода даже в случае, в котором магнитное поле приложено однородно в пределах всей длины элемента 12 привода, в отличие от приложения только в пределах узкой локализованной области, как было проиллюстрировано в примерах на фиг. 3 и фиг. 4.
Фиг. 4(b) показывает иллюстративный элемент привода, содержащий мягкие магнитные частицы, сфокусированные в не центральной локальной концентрации 42. Как показано, это позволяет стимулировать в элементе привода деформацию, локализованную в самого левого фрагмента элемента привода. В примерах это может бы быть объединено, например, с электрической стимуляцией элемента привода с использованием электродов (не показаны), чтобы тем самым обеспечить составной шаблон деформации, сформированный из общего по существу однородного изгиба или деформации элемента привода, объединенной с локализованной деформацией 36, индуцированной магнитным полем, как проиллюстрировано на фиг. 4(b).
Как и в примере на фиг. 4(a), хотя на фигуре проиллюстрировано локализованное магнитное поле 32, пример полностью совместим с магнитным полем, приложенным однородно в пределах всей длины элемента 12 привода.
Фиг. 4(c) иллюстрирует дополнительный пример, содержащий магнитные частицы, локально сконцентрированные в трех равномерно расположенных областях 42 в пределах всей длины элемента 12 привода. Соответствующий зажим 18 обеспечен между каждой соответствующей локальной областью 42. Как показано, обеспечено средство 22 формирования магнитного поля, выполненное с возможностью прикладывать магнитное поле, простирающееся в пределах каждой из соответствующих локальных областей 42. Отдельные локальные магнитные поля 32 могут быть приложены к каждой соответствующей области (как показано на фиг. 4(c)), или в пределах всей длины элемента привода может быть равномерно приложено одно магнитное поле, покрывающее каждую из соответствующих локальных областей 42. Этот последний альтернативный случай проиллюстрирован со ссылкой на фиг. 5. Следует отметить, что в этом случае конвергенция может быть значительно меньше, чем при размещении на фиг. 4(c), в котором стимулируется множество локализованных магнитных полей.
После приложения магнитного поля (полей) в пределах трех локальных областей 42 локально сконцентрированная деформация индуцируется в пределах каждой области, тем самым индуцируя составной шаблон деформации, состоящий из размещения трех выгибов или выступов вдоль элемента 12 привода. Как и в других примерах, это может быть объединено с электрической стимуляцией ЭАП-материала в элементе привода, чтобы тем самым обеспечить составной шаблон деформации, состоящий из трех локальных выгибов, показанных на фиг. 4(c), наложенных на более широкий общий изгиб или деформацию элемента привода, простирающийся равномерно в пределах всей длины элемента привода.
Эти три фрагмента могут быть стимулированы с помощью магнитного поля одновременно, отдельно или последовательно динамическим образом, например. Независимая стимуляция фрагментов может потребовать обеспечения компоновки, показанной на фиг. 4(c), в котором отдельное локальное магнитное поле формируется для приложения в пределах каждого из трех фрагментов. Эквивалентно, может быть обеспечено единственное средство формирования магнитного поля, способное формировать магнитное поле, имеющее напряженность поля, которая варьируется для разных фрагментов элемента привода.
В описанных выше вариантах осуществления предполагается, что электроактивная матрица полимера имеет такую вязкость, чтобы препятствовать миграции встроенных магнитных частиц через материал ЭАП-матрицы. Вязкость такова, что магнитная сила, приложенная к частицам средством 22 формирования магнитного поля, недостаточна для преодоления вязкого сопротивления матрицы полимера. Обычно это может иметь место, когда электроактивный полимер имеет относительно высокий модуль упругости (например, модуль Юнга).
В соответствии с одним или более подмножествами примеров магнитные частицы могут быть заключены в упруго деформируемые капельки полимера, имеющего вязкость ниже, чем у ЭАП-матрицы. Это схематично иллюстрировано на фиг. 6, которая показывает иллюстративную область элемента привода, в которой обеспечены магнитные частицы, взвешенные в капельке 48 полимера, капелька встроена в окружающую ЭАП-матрицу 46.
Капельки полимера диспергированы по всей ЭАП-матрице, каждая из которых содержит коллекцию из одной или более твердых магнитных частиц. После электрической стимуляции ЭАП (показано справа на фиг. 6) капельки полимера следуют за индуцированной деформацией ЭАП-матрицы посредством упругого изменения ее формы, но не мигрируют через матрицу полимера вследствие их относительно низкой вязкости. Эти два полимера должны быть, в частности, не смешивающимися.
Эффект обеспечения магнитных частиц, заключенных в капельки полимера, может представлять собой смягчение сопротивления против деформации ЭАП-матрицы. Это вызвано тем, что после деформации ЭАП частицы полимера способны к деформации без приложения значительного сопротивления к окружающему ЭАП. Это отличается от системы, в которой магнитные частицы непосредственно встроены в ЭАП-матрицу. В этом случае частицы действительно прикладывают частичное сопротивление против деформации ЭАП, поскольку молекулы ЭАП должны мигрировать (сдвигаться) вдоль поверхности частиц. Сдвиг против капелек действительно также возникает, но поскольку вязкость этих капелек значительно ниже, чем у ЭАП, частичное сопротивление против деформации меньше.
Как отмечено выше, широкий диапазон форм деформации и эффектов может быть реализован в соответствии с примерами посредством скоординированного управления средства формирования магнитного поля и средства формирования электрического поля. В примерах это включает в себя активацию двух средств одновременно, чтобы обеспечить составные шаблоны активации привода. В зависимости от направления приложенного магнитного поля воздействия электрического поля и воздействия магнитного поля могут прикладываться в одном и том же направлении или в противоположных направлениях. Когда они применяются в одном и том же направлении, могут быть достигнуты усиленные или увеличенные отклики деформации. Когда они применяются в противоположных направлениях, могут быть достигнуты двунаправленные шаблоны активации привода, причем в разных фрагментах элемента привода могут быть индуцированы противоположно направленные изгибы.
Следует отметить, что когда электрические и магнитные поля приложены одновременно, должно быть обеспечено чтобы индуцированные магнитные силы были больше, чем электростатические силы, индуцированные заряженными электродами, чтобы создать отклики деформации с повышенной амплитудой.
Для любого из описанных выше вариантов осуществления концентрация магнитных частиц и/или концентрация деформируемых капелек полимера могут меняться, чтобы усилить или ослабить отклики деформации в элементе привода. Концентрация частиц может меняться неоднородно в пределах элемента привода, чтобы таким образом настроить привод для обеспечения неоднородных шаблонов отклика деформации.
Примеры обеспечивают ЭАП-приводы с улучшенным функциональными возможностями. В частности, иллюстративные приводы могут обеспечивать большие силы активации привода посредством объединения деформации, стимулируемой магнитным и электрическим полями, и/или могут обеспечивать более широкий диапазон разных движений привода и форм деформации посредством скоординированного использования как электронной, так и магнитной стимуляции. Деформации, индуцированные каждым средством стимуляции, могут накладываться друг на друга, или ими можно управлять последовательно.
Посредством подходящего зажима элементы привода, проявляющие разные формы или действия активации привода могут быть индуцированы в разных областях. Например, элемент привода, имеющий три области, как показано на фиг. 4(c). Это может быть расширено на четыре, пять или любое произвольное количество областей. Каждой областью можно независимо управлять через магнитную стимуляцию. Фрагментами можно управлять для совместной или последовательной стимуляции. В соответствии с любым описанным примером может быть обеспечено множество средств 22 формирования магнитного поля для обеспечения возможности независимой магнитной стимуляции разных областей или фрагментов элемента привода. Средство формирования магнитного поля может быть обеспечено на одной и той же стороне элемента 12 привода или на разных сторонах, чтобы обеспечить возможность приложения магнитных полей, имеющих разные направленности. Посредством приложения полей разных направлений в разных областях можно индуцировать деформацию разных областей в разных направлениях. Таким образом, достижима двунаправленность.
Теперь будут подробно описаны примеры в соответствии с изобретением со ссылкой на сопроводительные фигуры. Эти примеры обеспечивают устройство привода, включающее в себя элемент ЭАП-привода, имеющий диспергированные твердые магнитные частицы, и дополнительно включающий в себя средство для приложения электрического стимула и магнитного поля к элементу привода. Контроллер выполнен с возможностью управлять этими двумя средствами скоординированным образом, чтобы тем самым реализовать программу одного или более шаблонов деформации в элементе привода.
Как отмечено выше, архитектура устройства, проиллюстрированного на фиг. 3, может подходящим образом использоваться в примерах при обеспечении простого первого варианта осуществления в соответствии с настоящим аспектом изобретения. Хотя конкретный пример, представленный на фиг. 3, содержит мягкие магнитные частицы, замена этих частиц на частицы твердого магнитного материала приводит к элементу привода полностью в соответствии с настоящим аспектом. Таким образом, читателю следует обратиться к приведенному выше описанию, относящемуся к фиг. 3, для подробного описания структуры подходящего иллюстративного устройства привода.
Элемент привода в соответствии с изобретением содержит ЭАП-материал, имеющий частицы твердого магнитного материала, диспергированные в нем. В настоящем документе твердый магнитный материал понимается как материал, который необратимо намагничен (через предшествующее приложение внешнего магнитного поля), и который не теряет свое намагничивание после удаления магнитного поля (т.е., имеет значительное остаточное намагничивание). Твердые магнитные частицы могут быть сделаны в качестве неограничивающего примера из ферромагнитных материалов, таких как ферриты, и металлов, такие как SmCo или NdFeB. Другие подходящие материалы для формирования твердых магнитных частиц будут очевидны специалистам в области техники.
Чтобы обеспечить элемент привода, имеющий диспергированные твердые магнитные частицы, твердые магнитные частицы могут быть смешаны с электроактивным полимером для формирования композита ЭАП. Этот композит может использоваться, чтобы сформировать основное тело элемента 12 привода. Чтобы гарантировать однородное и согласованное намагничивание элемента привода, магнитные частицы требуют процесса намагничивания, что достигается через приложение сильного магнитного поля, чтобы выровнять магнитные моменты частиц в однородном направлении.
Это намагничивание может быть выполнено перед смешиванием частиц. Однако, это может привести к собиранию частиц в группы вследствие магнитного притяжения между частицами. Тогда это затрудняет однородное смешивание частиц через ЭАП-материал. Таким образом, более предпочтительно намагничивание частиц выполняется после смешивания композита ЭАП, после которого частицы уже зафиксированы в позиции в ЭАП. ЭАП в этом случае должен иметь достаточно высокую вязкость, чтобы предотвратить миграцию диспергированных магнитных частиц через ЭАП в ответ на приложение магнитных полей.
Чтобы намагнитить частицы, внешнее магнитное поле прикладывается к элементу привода после смешивания и формирования для выравнивания магнитных моментов в согласованном направлении. Магнитное поле должно иметь напряженность, которая больше, чем напряженность коэрцитивного поля частиц. В предпочтительных случаях используется однородное магнитное поле (т.е., с однородной напряженностью поля), чтобы намагнитить частицы, поскольку это приводит к более однородному намагничиванию в пределах всего элемента привода (поскольку одинаковая напряженность магнитного поля испытывается в каждой точке). Однако намагничивание с использованием магнитного поля с неоднородной напряженностью также может рассматриваться в случае, в котором приложенная напряженность магнитного поля достаточно высока, чтобы привести частицы в состояние магнитного насыщения.
В соответствии с одним или более примерами намеренно неоднородное магнитное поле может быть приложено к элементу привода при его намагничивании, чтобы индуцировать неоднородный шаблон намагничивания в пределах элемента. Посредством обеспечения неоднородного намагничивания поведение активации привода элемента привода может быть различным. В частности, отклик деформации конкретной области зависит от магнитуды локального намагничивания. Посредством изменения напряженности намагничивания в пределах разных областей разные области могут осуществлять отклик большими или меньшими величинами на приложение однородного магнитного поля. Это может позволить создавать интересные и сложные шаблоны деформации в ответ на простое приложение однородного поля.
В конкретных примерах некоторые области могут быть оставлены не намагниченными, в то время как другие однородно намагничены. Это может обеспечить шарнирный или сочлененный отклик деформации, при котором приложенное магнитное поле заставляет намагниченные области деформироваться вокруг не намагниченных областей. Области с намагниченными частицами в примерах могут быть разделены областями с не намагниченными частицами. В соответствии с одним или более примерами разные области элемента привода могут быть обеспечены намагничиванием разных полярностей или направленностей, например, две соседние области противоположно намагничены.
Как отмечено, базовая структура иллюстративного устройства привода в соответствии с настоящим аспектом изобретения может быть понятна на основе приведенной выше иллюстрации на фиг. 3. Однако режимы управления для стимуляции шаблонов деформации в элементе привода (посредством магнитного и электронного средств) могут в целом отличаться от описанных выше. Теперь будут подробно описаны режимы и средства для управления иллюстративными элементами привода в соответствии с изобретением.
Фиг. 7 схематично иллюстрирует простое первое средство для магнитного управления иллюстративным элементом 12 привода в соответствии с изобретением. Фигура показывают малый фрагмент иллюстративного элемента 12 привода, имеющего диспергированные твердые магнитные частицы. Частицы однородно выровнены, чтобы наполнить элемент привода общим намагничиванием в восходящем направлении (с точки зрения фиг. 7). Поскольку частицы имеют постоянное остаточное намагничивание, которое не зависит от длительного приложения магнитного поля (в отличие от предыдущих примеров с мягким магнитным материалом), в настоящем аспекте возможно управлять элементом привода для деформации в разных желаемых направлениях посредством управления направленностью приложенного магнитного поля.
Это проиллюстрировано в двух конфигурациях, показанных на фиг. 7. В конфигурации слева средством 22 формирования магнитного поля управляют для приложения магнитного поля (с неоднородной напряженностью), имеющего намагничивание, ориентация которой совпадает с ориентацией намагничивания частиц, диспергированных в элементе 12 привода. В этом случае приложенное поле прикладывает силу притяжения к частицам (т.е., в направлении средства 22 формирования магнитного поля). Вязкость электроактивного полимера в соответствии с этим примером достаточно высока, чтобы предотвратить миграцию частиц через матрицу полимера. Как следствие, сила притяжения, примененная к приложенному магнитному полю, индуцирует изгиб элемента привода в направлении к средству 22 формирования магнитного поля.
В конфигурации справа на фиг. 7 средство 22 формирования магнитного поля выполнено с возможностью прикладывать магнитное поле с неоднородной напряженностью, имеющее намагничивание, ориентированное противоположно по отношении намагничивания частиц в элементе 12 привода. В этом случае приложенное поле прикладывает силу отталкивания к частицам (т.е., в направлении от средства 22 формирования магнитного поля). Как следствие приложение этого магнитного поля приводит к изгибу по меньшей мере показанного фрагмента элемента 12 привода в направлении от средства 22 формирования магнитного поля.
Таким образом, можно заметить, что посредством управления направлением приложенного магнитного поля возможно управлять направлением изгиба (или другой формы деформации), который индуцирован в одном или более фрагментах иллюстративного элемента 12 привода.
В обоих случаях прикладывается магнитное поле с неоднородной напряженностью. В частности, напряженность поля уменьшается в направлении от средства 22 формирования магнитного поля. Магнитная сила, приложенная к намагниченному телу посредством внешнего магнитного поля, в общем случае может быть задана отношением F= (m•B) (т.е. grad(m.B)). Когда напряженность магнитного поля снижается как функция увеличения расстояния от средства формирования магнитного поля, это приводит к положительному градиенту m•B (в предположении однородного намагничивания в пределах элемента привода) в направлениях к средству формирования магнитного поля. Конкретное направление магнитной силы, приложенной к магнитным частицам, будет зависеть в каждом случае от направления приложенного магнитного поля относительно направления намагничивания частиц.
(m•B) (т.е. grad(m.B)). Когда напряженность магнитного поля снижается как функция увеличения расстояния от средства формирования магнитного поля, это приводит к положительному градиенту m•B (в предположении однородного намагничивания в пределах элемента привода) в направлениях к средству формирования магнитного поля. Конкретное направление магнитной силы, приложенной к магнитным частицам, будет зависеть в каждом случае от направления приложенного магнитного поля относительно направления намагничивания частиц.
Когда средство формирования магнитного поля является малым, или по меньшей мере, когда средство формирования магнитного поля способно формировать поля, которые содержатся или ограничены в своем пространственном промежутке, может быть достигнута локально сфокусированная деформация элемента привода.
Эта концепция схематично проиллюстрирована на фиг. 8. В этом примере подготовлен элемент 12 привода, имеющий однородное намагничивание в пределах всей своей длины, с одинаковым направлением намагничивания в каждом фрагменте 52, 54 элемента привода.
На фиг. 8(a) первое средство 22 формирования магнитного поля прикладывает магнитное поле 32 в пределах первого фрагмента 52 элемента 12 привода в направлении, противоположном намагничиванию частиц, и второе средство 22 формирования магнитного поля прикладывает магнитное поле 32 в пределах второго фрагмента 54 элемента привода в направлении, совпадающем с намагничиванием частиц. Как следствие частицы в первом фрагменте 52 испытывают силу отталкивания, деформирующую первый фрагмент от первого средства формирования поля, и частицы во втором фрагменте 54 испытывают силу притяжения, деформирующую второй фрагмент ко второму средству формирования поля. Это приводит к волнообразному или волнистому шаблону деформации в элементе привода.
Фиг. 8(b) показывает сходную схему управления, в которой направленность обоих магнитных полей была изменена на обратную, в результате чего первый фрагмент 52 деформирован вниз, и второй фрагмент 54 деформирован вверх.
Посредством периодически повторяющегося переключения направленностей обоих средств 22 формирования магнитного поля как функции времени может быть достигнут динамический эффект волнообразной или виляющей деформации.
В дополнение к изменению направленностей обоих магнитных полей напряженности обоих полей также могут варьировать либо как функция времени, либо статически для достижения разных степеней деформации в каждом из двух соседних фрагментов. В результате может быть достигнут почти неограниченный диапазон разных двунаправленных шаблонов деформации.
Кроме того, хотя на фиг. 8 проиллюстрированы только два фрагмента, специалист в области техники без труда поймет, что концепция может быть расширена на элемент привода, содержащий любое количество разных фрагментов, каждый из которых снабжен независимо управляемым магнитным полем. Этому может способствовать либо обеспечение независимого средства формирования магнитного поля для каждого фрагмента, либо обеспечение средства формирования магнитного поля, способного формировать поле, имеющее разные напряженности в различных боковых местоположениях.
При расширении на большие количества независимо управляемых фрагментов, например, 10 или больше, возможно формировать шаблон бегущей волны вдоль элемента привода посредством последовательной активации магнитных полей для каждого последовательного фрагмента. Такая бегущая волна может успешно использоваться, например, для создания потока текучей среды, например, по элементу привода. Это может быть использовано, например, в качестве насоса. Режимы волнообразной деформации этого вида, в частности, полезны, например, в микрожидкостных системах для продвижения или перемещения текучей среды.
Фиг. 9 иллюстрирует вариацию иллюстративного режима управления, показанного на фиг. 8, в котором однородное (в поперечном направлении) магнитное поле приложено в пределах элемента привода, и в котором частицы, диспергированные в двух соседних фрагментах 52, 54, имеют соответственно по-разному ориентированное намагничивание. В результате после приложения однородного в поперечном направлении магнитного поля 32 каждый из двух соседних фрагментов 52, 54 элемента 12 привода деформируется в разном соответствующем направлении.
Как показано на фиг. 9(b), посредством переключения направленности приложенного магнитного поля 32 соответствующие направления деформации двух соседних фрагментов 52, 54 могут быть заменены на обратные. Динамическое волнообразное движение, достигнутое в примере на фиг. 8, таким образом, также может быть достигнуто в этом примере посредством периодически повторяющегося переключения направленности единственного однородного в поперечном направлении магнитного поля 32.
Дополнительные эффекты деформации также могут быть достигнуты в соответствии с вариантами осуществления настоящего аспекта через обеспечение неоднородного распределения частиц в электроактивной матрице полимера элемента 12 привода. Эти достижимые эффекты отражают проиллюстрированные и описанные выше со ссылкой на примеры на фиг. 4. Посредством размещения магнитных частицы в локальных концентрациях могут быть реализованы локализованные эффекты деформации.
Со ссылкой на фиг. 4 посредством концентрирования твердых магнитных частиц в центральной области 42 может быть осуществлен централизованно локализованный изгиб или деформация. Кроме того, полярность приложенного магнитного поля 32 может быть изменена на обратную в соответствии с примерами настоящего аспекта, чтобы тем самым достигнуть разных направлений изгиба этого центрального фрагмента 42 элемента привода. Направление магнитного поля может быть постоянно изменяться на обратное, чтобы тем самым достигнуть колебательного движения, например. Тот же самый принцип применим в отношении не центрального фрагмента 42, как показано на фиг. 4(b).
Дополнительно или в качестве альтернативы, как проиллюстрировано на фиг. 4(c), локализованная деформация может быть реализована в пределах массива локальных областей 42 посредством обеспечения множества локальных концентраций частиц. Посредством обеспечения зажимов между каждой из соседних областей локальный эффект деформации может быть расширен. Кроме того, в соответствии с примерами настоящего аспекта направленностью изгиба каждого индивидуального фрагмента можно независимо управлять посредством изменения направления приложенного магнитного поля в данной области. В результате может быть достигнут широкий диапазон разных шаблонов деформации.
В приведенном выше описании примеров изобретения было подробно описано, только управление для магнитной деформации элемента привода. Однако следует понимать, что в реализации любого варианта осуществления изобретения магнитные эффекты деформации прикладываются совместно или взаимодополняемо с эффектами деформации, индуцированными электрическим полем. Как показано на фиг. 3, в примерах может быть обеспечена пара электродов, прикрепленных к противоположным главным поверхностям элемента привода для приложения электрического стимула к электроактивному полимеру в форме приложенного электрического поля.
Индуцированные электрическим полем деформации могут быть приложены одновременно с индуцированными магнитным полем деформациями, или контроллер 30 может быть выполнен с возможностью реализовывать скоординированное последовательное управление этими двумя стимулами, чтобы достигнуть сложного статического или изменяющегося во времени шаблона деформации. Во всех случаях скоординированное управление обоими средствами стимуляции (электронным и магнитным) позволяет значительно увеличить диапазон и широту разных действий, форм и эффектов деформации.
В соответствии с примерами магнитные частицы могут представлять собой магнитострикционные частицы. Магнитострикционные частицы характеризуются преобразованием магнитной энергии в механическую энергию и наоборот. После намагничивания магнитострикционного материала материал проявляет натяжение, т.е. изменение своей длины на единицу длины. С другой стороны, внешне индуцированное натяжение в магнитном материале (т.е., индуцированное через приложение внешней силы) приведет к изменению магнитного состояния материала, тем самым индуцируя изменение в магнитном поле, проявляемом в пределах материала. Эта двусторонняя связь между магнитным и механическим состояниями магнитострикционных материалов обеспечивает способность трансдукции, которая может использоваться и для активации привода, и для восприятия изменения формы.
Магнитострикционные частицы могут быть сформированы из мягких магнитных материалов или твердых магнитных материалов, и, следовательно, описанные ниже примеры совместимы с применением к вариантам осуществления изобретения, описанным выше, или любыми примерами, описанными выше.
Простой пример деформации, индуцированной магнитным полем, с использованием магнитострикционных частиц, проиллюстрирован на фиг. 10. Иллюстративный элемент 12 привода содержит электроактивный полимерный материал, имеющий в себе магнитострикционные частицы.
Верхнее изображение показывает элемент 12 привода в неактивном состоянии до приложения магнитного поля. Схематично проиллюстрированы магнитные свойства иллюстративной магнитной частицы 62 в этом первом состоянии. Изображена иллюстративная частица, содержащая иллюстративный набор магнитных областей, каждая из которых содержит магнитные диполи, имеющие разное относительное выравнивание. Хотя показаны только четыре области, содержащие частицы, выровненные в четырех точно перпендикулярных ориентациях, это является лишь схематической иллюстрацией, и в действительности может быть больше областей, и обычно в частице будет очень большое количество (главным образом, микроскопических) областей, содержащих диполи, выровненные в разных направлениях.
В отсутствие какого-либо приложенного магнитного поля (как в случае частицы 62) магнитные диполи в пределах разных областей имеют случайные направления, в результате чего в макроскопическом масштабе дипольные моменты уравновешиваются, и каждая частица проявляет нулевое общее намагничивание.
Нижнее изображение на фиг. 10 показывает элемент привода после приложения однородного магнитного поля (т.е. магнитного поля, имеющего напряженность магнитного поля, которая является однородной в пределах протяжения элемента привода, и которая не изменяется как функция позиции). Однородное магнитное поле приложено посредством подходящего средства формирования магнитного поля (не показано), такого как управляемый электромагнит или другая катушка или соленоид.
Под влиянием приложенного магнитного поля магнитные диполи разных магнитных областей магнитострикционной частицы начинают выравниваться в общем направлении (параллельном с приложенным полем). Частица 64 схематично представляет магнитные области иллюстративной частицы после приложения магнитного поля с низкой напряженностью, и частица 66 представляет области после приложения магнитного поля с высокой напряженностью, и в этот момент диполи всех областей в частице выровнены, оставаясь фактически в единой однородной области диполей, все из которых выровнены в общем направлении.
Когда какое-либо однородное магнитное поле приложено к такому элементу 12 привода, не испытывается никакая сила притяжения или отталкивания, но магнитострикционные частицы претерпевают изменение формы в ответ на приложенное поле. В частности, изменяется объем магнитострикционных частиц. В предположении, что частицы являются сферическими в не стимулированном состоянии, приложение магнитного поля заставляет частицу немного деформироваться в эллиптическую форму. В макро-масштабе это может использоваться, чтобы обеспечить малую активацию привода, но имеющее большую силу.
В зависимости от конкретного типа магнитострикционного материала в элементе привода после приложения магнитного поля получается либо увеличение длины, либо уменьшение длины. В частности, в зависимости от материала может быть достигнут одни из двух разных видов магнитострикционного эффекта: положительный магнитострикционный эффект или отрицательный магнитострикционный эффект. Эти разные эффекты имеют разные ассоциированные отклики деформации на приложение заданного магнитного поля.
В примере на фиг. 10 проиллюстрированы частицы отрицательного магнитного материала. Приложение вертикально выровненного магнитного поля приводит к горизонтально выровненной деформации (или сжатию) частиц. Это приводит к общему сокращению толщины 16 элемента привода.
Следует отметить, что этот отклик деформации является достижимым с использованием либо однородного, либо неоднородного магнитного поля. Таким образом, эти примеры отличаются от описанных выше (относящихся к использованию не магнитострикционных частиц), когда стимулируемая магнитным полем активация привода достижима только после приложения неоднородного магнитного поля.
В конкретном примере на фиг. 10 однородное магнитное поле 72 приложено к элементу 12 привода, тем самым индуцируя изменение объема в магнитных частицах. В зависимости от типа материала может быть достигнуто увеличение длины или уменьшение длины в элементе привода. В конкретном примере на фиг. 10 проиллюстрировано увеличение длины. Вследствие этого электроактивная матрица полимера элемента привода расширится в перпендикулярном направлении до толщины 16 элемента привода. Это расширение может быть использовано, чтобы обеспечить силу активации привода с малой амплитудой, но с большой силой.
Как отмечено выше, отклик деформации иллюстративной частицы на приложение магнитного поля с низкой напряженностью показан в частице 64. Как видно, имеется небольшое расширение частицы в поперечном направлении.
В дополнительных примерах может использоваться магнитострикционный материал, который выполнен с возможностью сжиматься под влиянием магнитного поля. В этом случае электроактивная матрица полимера соответственно сжимается, снова с малой амплитудой, но с большой силой. Комбинация обоих этих видов материалов в одного элемента привода в примерах может позволить двунаправленный привод, в котором разные фрагменты элемента привода соответственно могут либо расширяться, либо сжиматься.
В соответствии с одним или более примерами магнитострикционные частицы могут быть распределены неоднородно по элементу привода, чтобы тем самым обеспечить набор локальных концентраций магнитных частиц. Это может позволить эффекты, сходные с описанными относительно примера на фиг. 4, в котором достижимы локализованные эффекты деформации. Например, посредством концентрации частиц в наборе из трех различных концентраций, как на фиг. 4(c), разные эффекты расширения или сокращения могут быть стимулированы в каждой из упомянутых локализованных областей 42. В частности, в областях с высокой концентрацией частиц любое расширение или сокращение матрицы полимера будут больше, и, следовательно, возникнут локальные эффекты деформации возникнут. Разнородность частиц в электроактивной смеси полимера может быть внесена посредством проектирования, чтобы создать любую желаемую конфигурацию деформации.
В соответствии с одним или более дополнительными примерами однородное или неоднородное распределение частиц может быть использовано в сочетании со структурированным магнитным полем, чтобы тем самым достигнуть различных эффектов деформации в разных локальных областях элемента привода. В частности, структурированное магнитное поле может иметь разные напряженности или направления магнитного поля в разных локальных областях, чтобы тем самым реализовать локально переменные эффекты деформации.
Использование магнитострикционных частиц может успешно быть объединено с любым описанным выше примером.
Теперь будут описаны примеры, относящиеся к восприятию изменений формы элемента ЭАП-привода посредством отслеживания магнитных свойств магнитных частиц, диспергированных в ЭАП. Описанные ниже примеры могут быть успешно объединены или включены в любой вариант осуществления изобретения.
Примеры обеспечивают устройство привода, включающее в себя элемент ЭАП-привода, имеющий встроенные магнитные частицы, и дополнительно включающий в себя датчика магнитного поля для обнаружения напряженности магнитного поля внутри или вблизи тела элемента привода. Контроллер выполнен с возможностью определять на основе выходной информации от датчика магнитного поля показатель относительно изменения формы элемента привода. В конкретных вариантах осуществления определенное изменение формы может использоваться в качестве информации обратной связи при управлении шаблоном деформации элемента привода.
Контроллер в соответствии с некоторыми примерами, в частности, адаптирован к определению показателя относительно изменения толщины элемента привода. Например, элемент привода может иметь слой как структуру, содержащую противостоящие главные поверхности. В этом случае толщина должна пониматься как размер элемента привода, простирающийся между двумя главными поверхностями в направлении, перпендикулярном каждой из них. Однако в более общем случае толщина может относиться к любому произвольному измерению элемента привода, но может, как правило, относиться к более малому или наименьшему размеру из трех измерений любого элемента привода, обеспеченного в соответствии с этими примерами.
Хотя ниже будут описаны конкретные примеры, которые относятся, в частности, к измерению изменения толщины элемента привода, следует понимать, что в дополнительных примерах сходные концепции могут быть без затруднений применены к определению других аспектов изменения формы. Посредством неограничивающего примера они могут включать в себя изменения ширины, высоты или длины элемента привода или изменения искривления или топологии элемента привода. Изменения формы в дополнительных примерах могут включать в себя изменения общего профиля или контура элемента привода.
Концепция может быть применена к элементам привода, содержащим твердые магнитные частицы, мягкие магнитные частицы и/или магнитострикционные частицы. Конкретные примеры, имеющие отношение к каждому из этих случаев, теперь будут подробно описаны.
Концепция, применяемая к иллюстративному элементу привода, содержащему диспергированные мягкие магнитные частицы, проиллюстрирована на фиг. 11-13. Концепция базируется в этом случае на отслеживании магнитной проницаемости элемента привода, содержащего диспергированные мягкие магнитные частицы.
Для частиц с высокой магнитной проницаемостью, таких как ферритовые частицы (где проницаемость может легко превысить 1000), магнитная проницаемость (μ) электроактивного полимерного композита может быть взята как пропорциональная:
μ=αNd /<g> (1)
где α - параметр пропорциональности, N - количество частиц на площадь поверхности, перпендикулярной к толщине элемента привода (где толщина понимается в смысле, описанном в предыдущем разделе), d - средний размер каждой частицы, параллельный толщине элемента привода, и <g> - средний промежуток между магнитными частицами элемента привода в направлении, параллельном толщине.
В случае, когда длина диспергированных магнитных частиц d увеличивается в направлении, параллельном толщине элемента привода (т.е., чтобы придать им неравное соотношение сторон), общая магнитуда проявляемой магнитной проницаемости для любого заданного <g> значительно увеличивается. Это схематично проиллюстрировано на фиг. 11, на которой показан иллюстративный элемент 12 привода, имеющий диспергированные магнитные частицы. На левом изображении частицы по существу симметричны по размерам высоты и ширины и имеют малое значение d 82 и большой промежуток <g>.
Правое изображение показывает элемент привода с частицами, имеющими значительно расширенный размер по высоте d 82, и как следствие промежуток <g> значительно сокращен. Вследствие этих изменений магнитная проницаемость μ увеличивается в сто раз. Эти числа обеспечены лишь посредством иллюстрации, и любая эквивалентная адаптация частиц для обеспечения увеличенного размера по высоте d является равным образом применимой.
Обеспечение таких вытянутых по высоте эллипсоидных частиц может быть достигнуто через любой диапазон известных процессов, и средства для формирования таких частиц будут очевидны специалисту в области техники (в частности, любому коллоидному химику).
Однородное выравнивание частиц, показанное на фиг. 11, может быть достигнуто в примерах посредством приложения относительно большого однородного магнитного поля к элементу 12 привода при увеличении его температуры, чтобы тем самым уменьшить силы вязкого сопротивления электроактивной матрицы полимера. Неоднородное поле также могло бы использоваться для выравнивания частицы. Однако это привело бы к применению к частицам общей силы поступательного движения, и вызвало разрушение распределения частиц в ЭАП-матрице. Использование однородного магнитного поля предотвращает эту трудность.
Когда достигнуто требуемое выравнивание, температура может быть опять сокращена, чтобы зафиксировать частицы на месте, и приложенное магнитное поле удаляется.
При рассмотрении частиц материала, имеющего высокую внутреннюю магнитную проницаемость, эффективная проницаемость элемента 12 привода приблизительно пропорциональна d/<g>. Когда частицы были соответствующим образом выровнены, как на правом изображении на фиг. 11, промежуток <g>, как правило, значительно меньше, чем размер по "высоте" частицы d. Типичное значение для отношения d:g, например, может составлять 10:1. В результате эффективная магнитная проницаемость элемента привода в неактивном, не приведенном в действие состоянии может быть приблизительно пропорциональна μ=α*N*10.
Когда напряжение приложено между электродами 26 (расположенными на противостоящих главных поверхностях элемента привода), электрическое поле устанавливается в пределах элемента 12 привода, и тем самым стимулируется уменьшение толщины элемента привода. В случае, когда магнитные частицы более твердые, чем электроактивная матрица полимера, это сжатие по толщине заставляет частицы быть ближе друг к другу, тем самым сокращая средний промежуток <g>.
Это схематично проиллюстрировано на фиг. 12, которая показывает иллюстративный элемент 12 привода, имеющий множество диспергированных мягких магнитных частиц 82. После приложения электрического поля между электродами 26 элемент привода вынужден сжаться по толщине, и тем самым это приводит к приведенному в действие состоянию, показанному на правом изображении на фиг. 12. Как показано, промежуток d между частицами значительно сокращен.
В частности, если промежуток будет сокращен до половины его размера, проницаемость μ удвоится и может стать приблизительно пропорциональной μ=α*N*20. Если промежуток будет сокращен до одной десятой его первоначального размера, проницаемость увеличится в 10 раз и может стать приблизительно пропорциональной α*N*100. Если сжатие элемента 12 является достаточно большим, чтобы промежуток между частицами был полностью преодолен (т.е., ЭАП между частицами полностью сжат с нулевым промежутком между частицами), проницаемость преобразуется в собственную проницаемость частиц, в результате чего она станет приблизительно пропорциональна μ=α * N * μintrinsic. Как указано выше, в некоторых случаях она может составлять более 1000.
Следовательно, изменения толщины элемента привода (либо посредством индуцированной электрическим полем деформации, либо иным образом) приводят к непосредственно измеримым изменениям проявляемой магнитной проницаемости элемента привода. Когда структура элемента привода соответствует примерам на фиг. 11 и 12, малые изменения толщины приводят к большим изменениям проявляемой магнитной проницаемости (например, изменения на порядки величины). Следовательно, посредством измерения изменения магнитной проницаемости элемента 12 привода могут быть количественно выведены изменения толщины.
Магнитная проницаемость элемента привода может быть измерена в примерах посредством дополнительного обеспеченного магнитного датчика, например, магнитной регистрирующей головки или датчика Холла. В примерах устройство привода может дополнительно содержать средство формирования магнитного поля для приложения малого (например, однородного) магнитного поля в пределах элемента привода, и магнитная проницаемость измеряется посредством измерения изменения проявляемого вспомогательного поля в пределах элемента привода (т.е., с использованием общего отношения B=μH). Посредством приложения однородного магнитного поля эта функциональность восприятия может быть обеспечена без вмешательства в индуцированную магнитным полем деформацию элемента привода с использованием неоднородного магнитного поля. Таким образом, восприятие толщины, описанное в настоящем документе, может быть успешно включено в любой из иллюстративных вариантов осуществления привода, описанных относительно упомянутого выше изобретения.
Устройство привода на фиг. 12 может дополнительно содержать контроллер (не показан), к которому может быть функционально соединен магнитный датчик (и при необходимости средство формирования магнитного поля). Контроллер может быть выполнен с возможностью управлять датчиком, чтобы отслеживать магнитную проницаемость элемента привода или отслеживать напряженность магнитного поля в пределах элемента привода. На основе измеренной напряженности магнитного поля контроллер может быть выполнен с возможностью вычислять изменение или абсолютное значение магнитной проницаемости в пределах элемента привода.
В примерах измеренная или определенная магнитная проницаемость (или изменение магнитной проницаемости) могут быть преобразованы в соответствующее изменение толщины с использованием сохраненной таблицы поиска. Таблица поиска может быть сохранена в памяти, содержащейся в устройстве привода, например, содержащейся в контроллере. Таблица поиска может хранить ассоциированные значения изменения толщины, которые известны как соответствующие диапазону разных возможных измеренных или определенных значений проницаемости. В качестве альтернативы изменения толщины могут быть вычислены контроллером с использованием теоретического соотношения.
В конкретных примерах измеренное значение магнитной проницаемости или определенные значения изменения толщины могут использоваться контроллером при управлении магнитной и/или электрической стимуляцией элемента привода. Таким образом, измеренные изменения толщины элемента могут использоваться, чтобы сообщить управлению степень активации привода или форму элемента привода. Описанная выше функциональность восприятия, таким образом, может использоваться в качестве формы прямой обратной связи при управлении деформацией элемента привода.
В соответствии с одним или более примерами магнитные частицы могут быть распределены неоднородно в элементе 12 привода. Пример схематично про иллюстрирован на фиг. 13, которая показывает элемент привода, содержащий три пространственно разделенных локальных концентрации 42 мягких магнитных частиц, распределенных в пределах ЭАП-матрицы элемента привода. Посредством обеспечения разнородности частиц, как показано, может быть обеспечено восприятие толщины привода в разных локальных фрагментах элемента привода. В частности, отдельный выделенный магнитный датчик может быть обеспечен для восприятия магнитного поля или магнитной проницаемости в пределах каждой локальной концентрации 42. Таким образом, могут быть достигнуты независимые локальные измерения магнитной проницаемости и, следовательно, изменения толщины.
Концепция, применяемая к иллюстративному элементу привода, содержащему диспергированные твердые магнитные частицы, проиллюстрирована на фиг. 14 и 15. Концепция базируется в этом случае на отслеживании напряженности намагничивания, проявляемой в пределах ограниченной боковой протяженности элемента привода. По мере изменения толщины изменяется объем на площадь поверхности элемента привода, и тем самым изменяется количество постоянных намагниченных частиц, способствующих намагничиванию в пределах любой фиксированной длины. Это может быть воспринято прилагаемым датчиком магнитного поля и использоваться, чтобы обеспечить показатель относительно степени какого-либо изменения толщины.
Простой пример этого варианта осуществления проиллюстрирован на фиг. 14. Левое изображение показывает иллюстративный элемент 12 привода, имеющий диспергированные твердые магнитные частицы в неактивном (не приведенном в действие) состоянии. Правое изображение показывает элемент привода после приложения электрического поля в пределах его толщины 16 между электродами 96, 98. Электрическое поле стимулирует ЭАП-материал элемента привода для деформации, тем самым приводя к сокращению толщины.
Размещенный вблизи к элементу 12 привода датчик 92 магнитного поля выполнен с возможностью отслеживать или измерить напряженность магнитного поля в местоположении внутри или вблизи элемента привода.
Как схематично проиллюстрировано на фиг. 14, после электрической стимуляции элемента 12 привода количество магнитных частиц, расположенных в области 102 восприятия магнитного датчика 92, уменьшается. В результате полная напряженность магнитного поля, проявляемая этим конкретным боковым фрагментом элемента привода, уменьшается измеримым образом. Посредством отслеживания изменения напряженности магнитного поля, воспринятого датчиком 92 магнитного поля, могут обнаруживаться и отслеживаться изменения толщины элемента привода.
Датчик 92 магнитного поля может быть функционально соединен с контроллером (не показан на фиг. 14), контроллер выполнен с возможностью определять на основе воспринятых напряженностей магнитного поля показатели относительно какого-либо изменения толщины элемента привода. В конкретных примерах это может быть достигнуто посредством предопределенной таблицы поиска, сохраненной в локальной памяти контроллера или доступной для контроллера, хранящей значения толщины элемента привода, коррелированные с каждым набором измеренных напряженностей магнитного поля. Эти значения, например, могут быть получены экспериментально для каждого конкретного элемента привода или могут являться стандартными значениями, которые известны как принадлежащие всем элементам привода конкретной спецификации. Значения изменения толщины в качестве альтернативы могут быть определены контроллером на основе известного теоретического отношения.
Определенные изменения толщины элемента привода в примерах могут использоваться, чтобы обеспечить информацию обратной связи о смещении для управления приводом 12. В примерах может быть установлен контур управления, в котором измерения толщины обеспечивают прямую или непрямую обратную связь, чтобы информировать контроллер, управляющий электрической стимуляцией элемента привода. Например, с помощью предопределенной таблицы поиска или иным образом контроллер может быть выполнен с возможностью увеличивать электрическое напряжение, приложенное между электродами 96, 98, пока не будет достигнута желаемая толщина, после чего напряжение выравнивается на постоянном значении.
Точное отношение между толщиной привода и изменением воспринятой напряженности магнитного поля зависит от множества факторов: количество постоянных частиц, воспринятых датчиком 92 магнитного поля, расстояние от этих частиц до датчика, а также конкретная форма деформации, индуцированная активацией привода - например, изгиб привода может привести к зависимому от напряжения изменению среднего расстояния между магнитными частицами и датчиком.
Это схематично проиллюстрировано на фиг. 15, которая показывает иллюстративный элемент 12 привода, имеющий диспергированные твердые магнитные частицы, и зажатый с обоих концов посредством набора зажимов 18. Когда элемент привода стимулируется электрическим полем, вследствие зажима индуцируется изгиб, который приводит к увеличению расстояния между магнитными частицами и датчиком 92 магнитного поля. Это может, как правило, приводить к сокращению воспринятой напряженности магнитного поля. Чтобы учесть это, контроллер может быть выполнен с возможностью предопределенным образом компенсировать ожидаемые изменения напряженности поля, возникающие в результате электрической деформации. Чтобы обеспечить возможность этого, контроллер может быть функционально соединен и с электродами 96, 98 и с датчиком магнитного поля, в результате чего в любое время может быть известно конкретное напряжение, приложенное к элементу привода. Затем это может использоваться при вычислении компенсированного значения напряженности поля.
В любом из настоящих примеров электрические и магнитные эффекты активации привода могут быть количественно настроены посредством изменения концентрации магнитных частиц, диаметра частиц и/или формы частиц.
Концепция, применяемая к иллюстративному элементу привода, содержащему диспергированные магнитострикционные частицы, схематично проиллюстрирована на фиг. 16. Концепция в этом случае также основана на отслеживании напряженности намагничивания, проявляемого магнитными частицами в элементе привода. После электрической стимуляции элемента привода и последующей деформации, в ЭАП-матрице индуцируются механические напряжения с магнитудой, зависящей от натяжения, индуцированного в элементе привода посредством деформации. Эти механические напряжения в свою очередь прикладываются к магнитострикционным частицам. Как обсуждалось выше, магнитострикционные частицы имеют свойство предсказуемым образом изменять свое намагничивание в ответ на приложенные механические напряжения. Таким образом, можно заметить, что посредством отслеживания проявляемого намагничивание в пределах по меньшей мере фрагмента элемента привода может определяться и отслеживаться изменение толщины элемента привода (т.е., компонента индуцированного натяжения).
На фиг. 16 схематично проиллюстрирован пример, который показывает иллюстративный элемент 12 привода, сформированный из электроактивного полимерного материала, имеющего диспергированные в нем магнитострикционные частицы. Левое изображение показывает элемент привода в начальном, не приведенном в действие состоянии. Магнитные свойства одной иллюстративной магнитной частицы схематично проиллюстрированы посредством ссылочного номера 62, который показывает, что в этом начальном состоянии частицы имеют нулевое суммарное намагничивание (магнитные диполи выровнены в случайных направлениях). После деформации элемента привода форма магнитных частиц становится деформированной, изменяясь от более сферической формы 62 к более эллипсоидной форме 63. В результате частица вынуждена набирать суммарное намагничивание (как показано в 63). Для настоящего примера предполагается, что частицы содержат положительный магнитострикционный материал. В результате частицы отвечают на горизонтально выровненную деформацию элемента привода соответствующим горизонтально выровненным намагничиванием (для настоящего примера в направлении справа налево, с точки зрения фиг. 16). Для направления намагничивания также следует отметить следующее: при условии, что магнитный диполь находится в горизонтальной плоскости, нет какого-либо предпочтительного направления. Однако, когда плотность частиц достаточно высока, может иметься взаимное влияние, в результате чего магнитные ориентации диполей выравниваются в одном направлении в горизонтальной плоскости. Можно принять это во внимание при проектировании или работе.
Показанные на фиг. 16 формы конкретных частиц представлены лишь посредством иллюстрации, и в дополнительных примерах частицы могут иметь любую желаемую форму без уменьшения требуемых эффектов устройства привода.
Изменения проявляемого намагничивания могут быть измерены посредством обеспеченного датчика магнитного поля. Посредством неограничивающего примера это может быть электропроводная обмотка (такая как в магнитной регистрирующей головке) или, например, датчик Холла, или магниторезистивный датчик. Другие современные магнитные датчики, подходящие для измерения напряженности магнитного поля, будут очевидны специалисту в области техники.
Датчик магнитного поля может быть функционально соединен с контроллером, выполненным с возможностью определять на основе обнаруженных напряженностей поля значения или изменения толщины 16 элемента 12 привода. Изменения толщины могут быть определены в примерах посредством предопределенной таблицы поиска, сохраненной в локальной памяти контроллера или доступной для контроллера, хранящей значения толщины элемента привода, коррелированные с каждым набором измеренных напряженностей магнитного поля. Эти значения, например, могут быть получены экспериментально для каждого конкретного элемента привода или могут являться стандартными значениями, которые известны как принадлежащие всем элементам привода конкретной спецификации. Значения изменения толщины в качестве альтернативы могут быть определены контроллером на основе известного теоретического отношения.
Как и в приведенных выше примерах, определенные изменениях толщины элемента привода в примерах могут использоваться, чтобы обеспечить информацию обратной связи для управления приводом 12. В примерах может быть установлен контур управления, в котором измерения толщины обеспечивают прямую или непрямую обратную связь, чтобы информировать контроллер, управляющий электрической стимуляцией элемента привода.
Как и в ранее описанном варианте осуществления, измеренная напряженность магнитного поля зависит от многих факторов, включающих в себя расстояние между магнитными частицами и датчиком магнитного поля. Это расстояние может изменяться как функция приложенного напряжения (или тока) в случае, когда элемент привода выполнен с возможностью сгибаться в ответ на электрическую стимуляцию. В примерах контроллер может быть выполнен с возможностью компенсировать такие зависимые от напряжения изменения напряженности поля, например, в соответствии со способами, описанными относительно предыдущего примера.
Также, как обсуждалось относительно предыдущего примера, определенные изменения толщины могут быть использованы контроллером при информировании управления деформации элемента привода. Определенные изменения толщины могут использоваться, например, в качестве части контура обратной связи при управлении поведением активации привода (как описано выше).
Как обсуждалось выше, магнитострикционные частицы могут представлять собой частицы либо твердого, либо мягкого магнитного материала. В соответствии с этим описываемые примеры могут быть объединены или включены в любые из других примеров или вариантов осуществления, описанных в этом раскрытии.
В соответствии с любым примером восприятие изменений формы элемента привода может выполняться одновременно со стимуляцией деформации элемента привода посредством либо электрической стимуляции, либо магнитной стимуляции. Для одновременного магнитного восприятия и стимулируемой магнитным полем деформации определение изменения формы (например, толщины) могут потребовать компенсации известного магнитного поля, активно прикладываемого в пределах элемента привода.
Например, в случае диспергированных твердых магнитных частиц любая измеренная напряженность магнитного поля в пределах элемента привода, как правило, может включать в себя магнитное поле, прикладываемое для стимуляции деформации. Чтобы отслеживать изменение формы (посредством отслеживания изменений проявляемой напряженности магнитного поля в пределах элемента - как описано в приведенных выше примерах), необходимо только вычесть или иным образом устранить из измеренной напряженности поля магнитуду известного активно приложенного магнитного поля. Сходная схема компенсации также может быть применена в случае измерения изменений формы в элементах привода, имеющих встроенные мягкие магнитные или магнитострикционные частицы.
В соответствии с любым вариантом осуществления настоящего изобретения может быть достижимо определение изменения формы (например, толщины) элемента привода, вызванного стимуляцией активации привода элемента (либо электрическим, либо магнитным полем). Это может быть достигнуто, в частности, посредством определения показателя относительно формы элемента перед активацией привода и впоследствии определения показателя относительно формы после активации привода элемента. Как обсуждалось выше, таблицы поиска или методы расчета могут использоваться для определения на основе обнаруженных напряженностей магнитного поля до и после активации привода показателей относительно формы элемента привода (например, показателя относительно толщины, высоты или ширины). Посредством сравнения эти двух значений (например, вычитая один из другого), может быть достигнут показатель относительно изменения формы.
Хотя в приведенном выше подробном описании построение и работа устройств и систем в соответствии с изобретением были описаны для ЭАП, изобретение на самом деле может использоваться для устройств на основе других видов ЭАМ (электроактивных материалов). Следовательно, если не указано иначе, ЭАП-материалы выше могут быть заменены на другие материалы ЭАМ. Такие другие материалы ЭАМ известные в области техники, и специалист в области техники поймет, где найти их и как применить их. Много вариантов будут описаны в настоящем документе ниже.
Управляемые полем ЭАМ могут быть органическими или неорганическими материалами, и органические могут представлять собой единственную молекулу, являться олигомерными или полимерными. Они в общем случае являются пьезоэлектрическими и, возможно, сегнетоэлектриками, и, таким образом содержат непосредственную постоянную поляризацию (дипольный момент). В качестве альтернативы они являются электрострикционными, и, таким образом, содержат поляризацию (дипольный момент), только когда приводятся в возбуждение, но не когда не приводятся в возбуждение. В качестве альтернативы они представляют собой диэлектрические материалы релаксоры. Такие полимеры включают в себя, но без ограничения, подклассы: пьезоэлектрические полимеры, сегнетоэлектрические полимеры, электрострикционные полимеры, сегнетоэлектрические полимеры релаксоры (такие как полимеры релаксоры на основе PVDF или полиуретаны), диэлектрические эластомеры, жидкокристаллические эластомеры. Другие примеры включают в себя электрострикционные привитые полимеры, электрострикционную бумагу, электреты, электровязкоупругие эластомеры и жидкокристаллические эластомеры.
Отсутствие непосредственной поляризации означает, что электрострикционные полимеры проявляют минимальную гистерезисную потерю даже при работе на очень высоких частотах. Однако преимущества получаются за счет температурной стабильности. Релаксоры работают лучше всего в ситуациях, когда температура может быть стабилизирована приблизительно при 10°C. На первый взгляд это может показаться чрезвычайным ограничением, но с учетом того, что электрострикционные материалы проявляют себя с наилучшей стороны на высоких частотах и очень малых возбуждающих полях, они имеют тенденцию применяться в специализированных микроприводах. Температурная стабилизация таких небольших устройств относительно проста и часто представляет лишь незначительную проблему в общей конструкции и процессе разработки.
Сегнетоэлектрические материалы релаксоры могут иметь электрострикционную константу, которая достаточно высока для хорошего практического применения, т.е., выгодна для одновременных функций восприятия и активации привода. Сегнетоэлектрические материалы релаксоры не являются сегнетоэлектриками, когда к ним приложено нулевое возбуждающее поле (т.е., напряжение), но становятся сегнетоэлектриками во время возбуждения. Следовательно, при отсутствии возбуждения в материале не присутствует какое-либо электромеханическое сцепление. Электромеханическое сцепление становится отличным от нуля, когда приложен возбуждающий сигнал, и может быть измерено посредством наложения сигнала с малой амплитудой и высокой частотой на возбуждающий сигнал, в соответствии с процедурами, описанными выше. Сегнетоэлектрические материалы релаксоры, кроме того, извлекают выгоду из уникальной комбинации высокого электромеханического сцепления при отличном от нуля возбуждающем сигнале и хороших характеристик активации привода.
Обычно используемые примеры неорганических сегнетоэлектрических материалов релаксоров: ниобат свинца-магния (PMN), ниобат свинца-магния титанат свинца (PMN-PT) и цирконат-титанат свинца-лантана (PLZT). Но в области техники известны и другие.
Сегнетоэлектрические полимеры релаксоры на основе PVDF проявляют спонтанную электрическую поляризацию, и они могут быть подвергнуты предварительному натяжению для улучшенного функционирования в направлении натяжения. Они могут представлять собой любой материал, выбранный из представленной ниже группы.
Поливинилиденфторид (PVDF), поливинилиденфторид-трифторэтилен (PVDF-TrFE), поливинилиденфторид-трифторэтилен-хлорфторэтилен (PVDF-TrFE-CFE), поливинилиденфторид-трифторэтилен-хлортрифторэтилен) (PVDF-TrFE-CTFE), поливинилиденфторид-гексафторпропилен (PVDF-HFP), полиуретаны или их смеси.
Управляемые током ЭАМ и ЭАП содержат сопряженные полимеры, ионные полимер-металлические композиты, ионные гели и полимерные гели.
Примерами ионно-управляемых ЭАП являются сопряженные полимеры, углеродная нанотрубка (CNT), полимерные композиты и ионные полимер-металлические композиты (IPMC).
Подкласс диэлектрические эластомеры включают в себя, но без ограничения:
акрилаты, полиуретаны, кремнийорганические каучуки.
Подкласс сопряженные полимеры включает в себя, но без ограничения:
полипиррол, поли-3,4-этилендиокситиофен, поли(p-фенилен сульфид), полианилины.
Упомянутые выше материалы могут быть внедрены как чистые материалы или как материалы, взвешенные в матричных материалах. Матричные материалы могут содержать полимеры.
Для любой структуры активации привода, содержащей ЭАМ, могут быть обеспечены дополнительные пассивные слои для воздействия на поведение слоя ЭАМ в ответ на приложенный возбуждающий сигнал.
Компоновка активации привода или структура ЭАП-устройства могут иметь один или более электродов для обеспечения управляющего сигнала или возбуждающего сигнала по меньшей мере для части электроактивного материала. Предпочтительно компоновка содержит два электрода. ЭАП может быть зажат между двумя или больше электродами. Это наслаивание необходимо для компоновки привода, которая содержит эластомерный диэлектрический материал, поскольку его активация привода среди прочего происходит вследствие силы сжатия, прикладываемой электродами, притягивающимися друг к другу вследствие возбуждающего сигнала. Два или более электродов также могут быть встроены в эластомерный диэлектрический материал. Электроды могут быть структурированы или не структурированы.
Подложка может являться частью компоновки активации привода. Она может быть присоединена к сборке ЭАП и электродов между электродами или к одному из электродов на внешней стороне.
Электроды могут быть растягивающимися, чтобы следовать за деформацией слоя материала ЭАМ. Это преимущественно выгодно для ЭАП-материалов. Материалы, подходящие для электродов, также известны и, например, могут быть выбраны из группы, содержащей тонкие металлические пленки, например, золотые, медные или алюминиевые, или органические проводники, например, сажистый углерод, углеродные нанотрубки, графен, полианилин (PANI), поли(3,4-этилендиокситиофен) (PEDOT), например, поли(3,4-этилендиокситиофен) поли(стиролсульфонат) (PEDOT:PSS). Также могут использоваться металлизированные полиэфирные пленки, такие как металлизированный полиэтилентерефталат (PET), например, с использованием алюминиевого покрытия.
Некоторые компоновки могут иметь электродные слои на каждой стороне слоя электроактивного материала. Также возможно обеспечить электродный слой только на одной стороне, например, с использованием переплетенных гребенчатых электродов.
Материалы для разных слоев будут выбираться, например, с учетом модулей упругости (модулей Юнга) разных слоев.
Дополнительные слои для обсуждавшихся выше слоев могут использоваться для адаптации электрического или механического поведения устройства, например дополнительные слои полимера.
Упомянутые выше примеры используют композитные материалы, которые объединяют электроактивный материал (в частности, полимер) и другие частицы (который будут в целом называться как "наполнитель").
Теперь будет обсужден метод, которым такие композиционные материалы могут быть изготовлены, а также воздействия на физические и электрические свойства электроактивного материала.
Сначала будет представлен пример диэлектрических эластомерных электроактивных материалов. Они зажаты между двумя электродами для создания диэлектрических электроактивных полимерных приводов. Кремнийорганический каучук являются основной применимой группой эластомеров. Деформация является результатом сил притяжения между положительно и отрицательно заряженными электродами.
Смешивание частиц в кремнийорганические каучуки широко используется в промышленных масштабах. В качестве примера линзы ультразвукового преобразователя делаются из кремнийорганического каучука (полидиметилсилоксана, PDMS) заполненного частицами железа и оксида кремния, чтобы увеличить акустический импеданс и износостойкость. Соединения PDMS (кремнийорганического каучука), содержащие рутил (TiO2), широко используются для увеличения показателя преломления или создания белых отражающих материалов.
В отношении рабочих характеристик диэлектрического электроактивного полимера смешивание с непроводящими твердыми частицами, такими как керамика, имеет два основных значительных эффекта. Во-первых, увеличивается жесткость материала, и требуются большие силы для получения тех же самых уровней натяжения. Другой эффект состоит в том, что диэлектрическая постоянная композита изменяется (в целом диэлектрическая постоянная наполнителя будет выше, чем у кремнийорганического каучука, и составляет около 3). Является ли эффект натяжения в зависимости от напряжения положительным или отрицательным, зависит от диэлектрической постоянной частиц и от размера частицы, поскольку большее количество мелких частиц имеет большее воздействие на жесткость.
Это обсуждается в литературе S. Somiya, "Handbook of Advanced Ceramics: Materials, Applications, Processing, and Properties," in Nonlinear Dielectricity of MLCCs, Waltham, Academic Press, 2013, p. 415. В качестве примера добавление частиц увеличивает диэлектрическую постоянную, но также и увеличивает жесткость.
Таким образом, известно примешивание наполнителей к эластомерам, чтобы влиять на свойства диэлектрического электроактивного полимера.
Кремнийорганические эластомеры в целом готовятся посредством смешивания двух компонентов. Один из них содержит Pt или катализатор пероксидного отверждения. Разные компоненты могут быть смешаны в высокоскоростном смесителе. В этом же процессе может быть добавлен наполнитель, или наполнитель может быть уже заранее перемешан в одном или обоих компонентах. Материал наполнителя обычно применяется в растворителе, который испаряется во время обработки. После или во время смешивания в высокоскоростном смесителе обычно применяется вакуум, чтобы удалить включения воздуха (и/или растворителей). После этого смесь может быть отлита и отверждена. Температура и время отверждения зависят от сорта полимера, но как правило составляют около 80°C в течение 10 минут. Большинство частиц совместимы с кремнийорганическими каучуками при условии, что они не инактивируют катализатор (например, материалы, содержащие серу). Отверждаемые пероксидом кремнийорганические каучуки являются менее чувствительными.
Кремнийорганические каучуки могут быть подвергнуты инжекционной отливки (жидкие кремнийорганические каучуки, LSR). Эти два компонента вводятся на винте литьевой машины LSR после прохождения (статического) смесителя. Частицы наполнителя могут быть заранее перемешаны в одном или обоих компонентах. Материал транспортируется холодным винтом и вводится в горячую форму для отливки, где он быстро отверждается в зависимости от температуры. Поскольку LSR имеет очень низкую вязкость, могут быть реализованы очень тонкие секции. Типичные температуры отверждения составляют около 180°C и время приблизительно от 30 секунд до одной минуты.
Помимо формовки и инжекционной отливки доступны многие другие технологии придания формы, чтобы произвести компоненты кремнийорганического композита также в форме тонких пленок. Примерами являются горячее прессование (пленок и профилей), прокат пленок, многослойное ламинирование и прокат, отливка пленки с помощью ракеля, покрытие с помощью центрифуги и печать экрана.
Добавление наполнителя может быть выполнено локально при изготовлении, например, посредством использования инжекционной отливки с несколькими дозами впрыска (с 2 дозами впрыска, или многослойная отливка), распыление и покрытие кремнийорганического каучука или послойный синтез кремнийорганического каучука (т.е., 3D печать)
Далее будет представлен пример пьезоэлектрических полимерных композитов.
Были исследованы пьезоэлектрические полимерные композиты, содержащие соединение PVDF (матричный полимер) и керамические частицы, такие как PZT. Подходящими являются такие технологии производства, как формование окунанием в раствор и покрытие с помощью центрифуги. Кроме того, подходящими являются технологии холодного и горячего прессования. После растворения PVDF испарения растворителя, пока не получена вязкая смесь, и затем может быть выполнено смешивание частиц наполнителя. Могут быть реализованы композиты на основе полимера PVDF с хорошо диспергированным гранулометрическим составом и неповрежденной полимерной матрицей.
Далее будет представлен пример приводов с электрострикционным полимером релаксором.
Это класс полукристаллических терполимеров, который может предоставить относительно высокую силу со средним натяжением. Таким образом, эти приводы имеют широкий спектр возможного применения. Электрострикционные полимеры релаксоры были разработаны из "обычных" полимеров PVDF с использованием модификаций с надлежащими дефектами. Они содержат: винилиденфторид (VDF), трифторэтилен (TrFE) и 1,1-хлорфторэтилен (CFE) или хлортрифторэтилен (CTFE).
Добавление дефектов в форме химических мономеров, таких как 1,1-хлорфторэтилен (CFE), которые являются сополимеризированными с VDF-TrFE, устраняет обычную сегнетоэлектрическую фазу, приводя к сегнетоэлектрику релаксору с электромеханическим натяжением, превышающим 7%, и плотностью упругой энергии 0,7 Дж/см3 на уровне 150 мВ/м. Кроме того, было описано, что, вводя дефекты через высокое электронное облучение сополимеров P(VDF-TrFE) сополимер также может быть преобразован из "обычного" сегнетоэлектрика P(VDFTrFE) в сегнетоэлектрический релаксор.
Материалы могут быть сформированы посредством синтеза полимеров, как описано в литературе F. Carpi and et.al, "Dielectric Elastomers as Electromechanical Transducers: Fundamentals, Materials, Devices, Models and Applications of an Emerging Electroactive Polymer Technology," Oxford, Elsevier, 2011, p. 53. Там раскрывается комбинация процесса суспензионной полимеризации и активированного кислородом инициатора. Эти пленки могут быть сформированы посредством наливания раствора на стеклянную подложку и затем испарения растворителя.
Желаемый наполнитель может быть добавлен к растворителю перед формовкой пленки. После формовки композит может быть подвергнут отжигу, чтобы удалить растворитель и увеличенную кристалличность. Скорость кристаллизации может быть сокращена в зависимости от концентрации наполнителя и гранулометрического состава. Растяжение выровняет цепи молекул и станет более трудным, поскольку частицы могут проникать в молекулярные цепи. Диэлектрическая постоянная увеличится для большинства добавок, что сокращает требуемое напряжение срабатывания, чтобы достигнуть некоторого натяжения. Жесткость материала увеличит сокращение натяжения.
Процесс производства, таким образом, включает в себя формирование раствора для полимера, добавление частиц, смешивание, за которым следует формование (например, формование ленты), потенциально объединенное с ламинированием. Альтернативами являются покрытием с помощью центрифуги, прессование и т.д.
Локальные вариации концентрации могут быть реализованы с использованием распыления и/или 3D печати с растворителем. С помощью процессов 3D печати, например, возможна толщина слоя от 10 до 20 мкм.
Во всех примерах добавление наполнителя в целом имеет воздействие на напряжение пробоя. Максимальное натяжение, которое может быть достигнуто с помощью электроактивного полимера, определяется максимальным напряжением, которое может быть приложено, которое является напряжением пробоя (или диэлектрической прочностью).
Напряжение пробоя полимеров относится к диссоциации молекул полимера под приложенным внешним полем. Добавление частиц наполнителя в матрицу полимера может иметь значительное влияние на напряжение пробоя. Преимущественно большие частицы могут локально увеличивать поля. Таким образом, состав полимеров с частицами в диапазоне ниже микрона имеет более низкий отрицательный эффект на напряжение пробоя. Кроме того, структура границы раздела полимер-наполнитель может сильно влиять на напряжение пробоя.
Скопление частиц является другим эффектом, который сокращает напряжение пробоя. Однако посредством модификации поверхности частиц, предотвращения скопления и улучшения структуры поверхности раздела отрицательный эффект уровней напряжения пробоя может быть сокращен. Однако заполненные полимеры получат более низкую прочность к пробою, чем незаполненные полимеры, что ведет к понижению натяжения активации привода.
В заключение, для диэлектрических электроактивных полимеров смешивание с частицами может быть достигнуто с использованием широкого спектра промышленных технологий смешивания и придания формы. Чтобы поддерживать ограниченное воздействие на жесткость и тем самым сокращение величины хода привода, предпочтительны меньшие концентрации. Для заданной объемной концентрации не слишком мелкие частицы также предпочтительны, чтобы поддерживать ограниченным воздействие на жесткость. Мягкий основной полимер может быть выбран, чтобы компенсировать повышение жесткости. Увеличенная диэлектрическая постоянная может позволить активировать привод при пониженном напряжении. Чтобы поддержать диэлектрическую прочность, размер и концентрация частицы должны быть ограничены, и могут быть приняты меры, чтобы улучшить границу раздела полимер-наполнителя, а также дисперсию частиц. Могут быть напечатаны локальные вариации концентрации.
Для электроактивных полимеров релаксоров смешивание с частицами также возможно. Сходные тенденции в отношении влияния концентрации и размера частиц на жесткость и диэлектрическую прочность сопоставимы с описанными выше воздействиями. Частицы могут быть добавлены после полимеризации. Растворенные полимеры могут быть сформированы с использованием разных технологий, такие как формование и покрытие с помощью центрифуги. Также возможны локальные вариации концентрации.
Другие изменения для раскрытых вариантов осуществления могут быть поняты и выполнены специалистами в области техники при осуществлении заявленного изобретения на основе изучения чертежей, описания и зависимых пунктов формулы изобретения. В пунктах формулы изобретения слово "содержит" не исключает другие элементы или этапы, и употребление единственного числа не исключает множество. Тот лишь факт, что некоторые меры описаны во взаимно различных зависимых пунктах формулы изобретения, не указывает, что комбинация этих мер не может использоваться для получения преимуществ.
Любые ссылочные позиции в формуле изобретения не должны рассматриваться как ограничение объема изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| ИСПОЛНИТЕЛЬНОЕ УСТРОЙСТВО И СПОСОБ ДЛЯ НЕГО | 2017 |
|
RU2754722C2 |
| ИСПОЛНИТЕЛЬНОЕ УСТРОЙСТВО И СПОСОБ ДЛЯ НЕГО | 2017 |
|
RU2750855C2 |
| ЭЛЕКТРОАКТИВНЫЙ ПОЛИМЕРНЫЙ ПРИВОД | 2017 |
|
RU2736009C2 |
| УСТРОЙСТВО С ИСПОЛНИТЕЛЬНЫМ МЕХАНИЗМОМ НА ОСНОВЕ ЭЛЕКТРОАКТИВНОГО ПОЛИМЕРА | 2016 |
|
RU2720478C2 |
| УПРАВЛЕНИЕ ЖЕСТКОСТЬЮ ДЛЯ ЭЛЕКТРОАКТИВНЫХ ИСПОЛНИТЕЛЬНЫХ УСТРОЙСТВ | 2017 |
|
RU2748051C2 |
| АКТУАТОРНОЕ УСТРОЙСТВО НА ОСНОВЕ ЭЛЕКТРОАКТИВНОГО ПОЛИМЕРА | 2017 |
|
RU2737789C2 |
| УСТРОЙСТВО ПРИВОДА, ИМЕЮЩЕЕ В СВОЕМ СОСТАВЕ ЭЛЕКТРОАКТИВНЫЙ ПОЛИМЕРНЫЙ ПРИВОД, И СПОСОБ УПРАВЛЕНИЯ | 2017 |
|
RU2737790C2 |
| ДАТЧИК ПОТОКА И СПОСОБ ИЗМЕРЕНИЯ СКОРОСТИ ПОТОКА | 2017 |
|
RU2768159C2 |
| СЕНСОРНОЕ УСТРОЙСТВО И СПОСОБ ИЗМЕРЕНИЯ ФИЗИОЛОГИЧЕСКОГО ПАРАМЕТРА | 2017 |
|
RU2750352C2 |
| ЭАП-ПРИВОД И СПОСОБ ВОЗБУЖДЕНИЯ | 2017 |
|
RU2750680C2 |


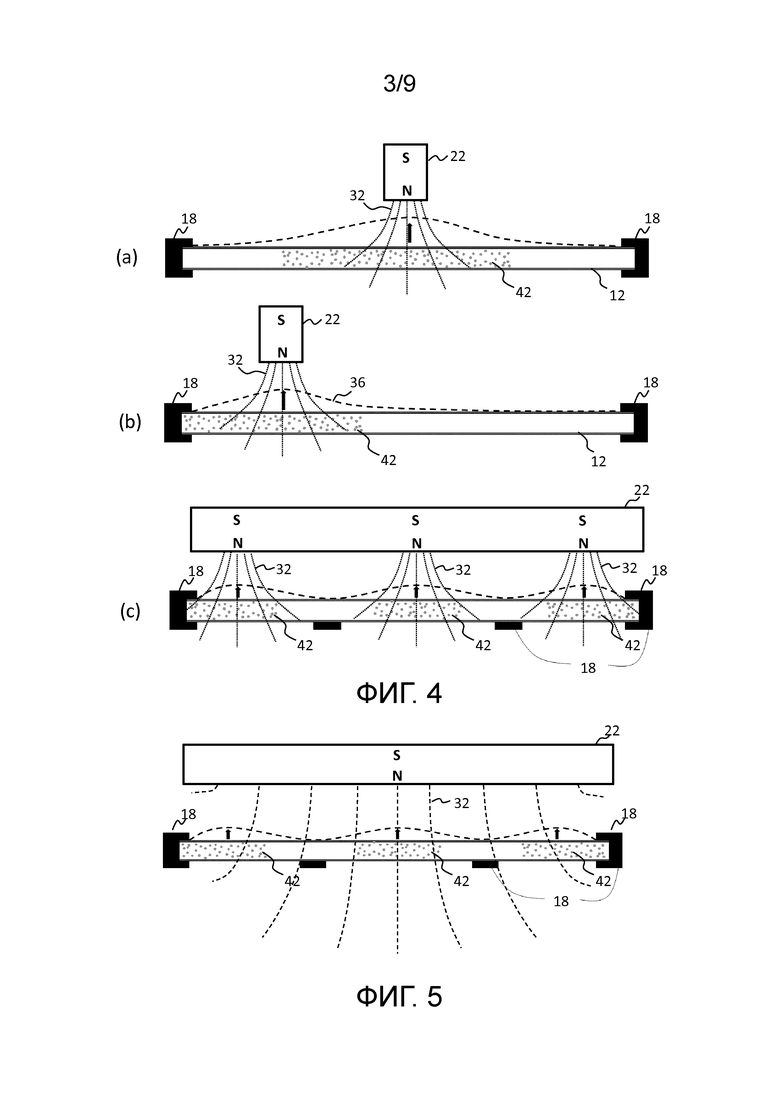
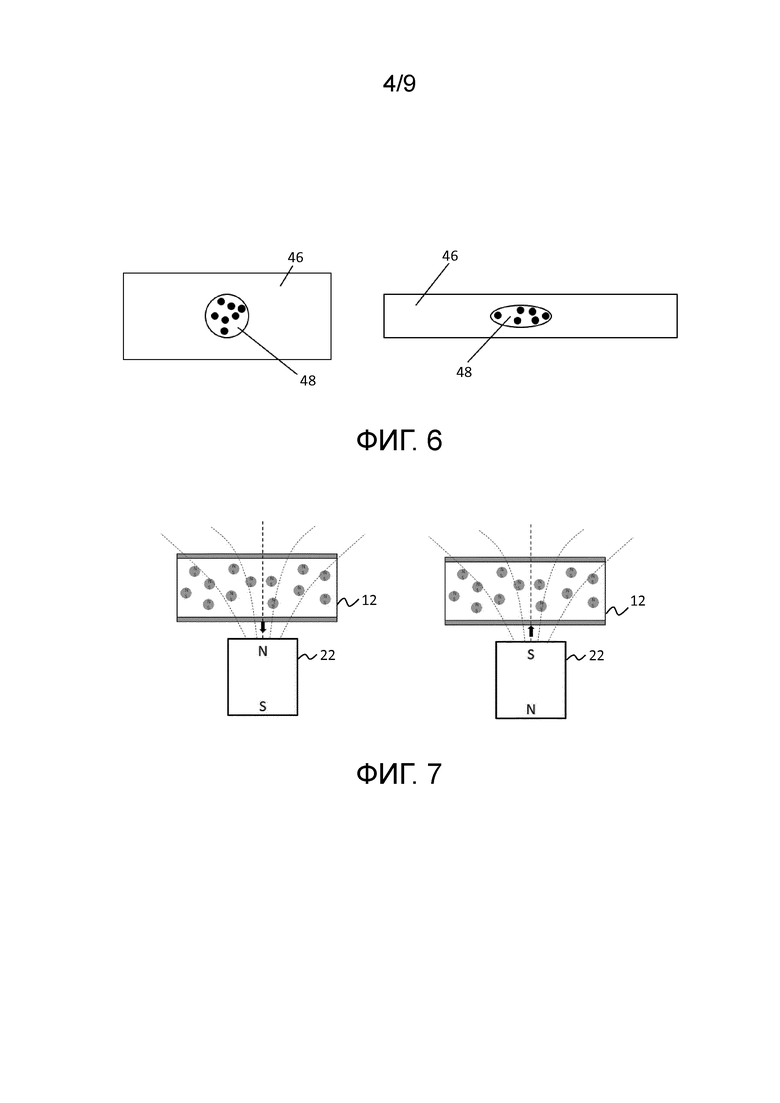

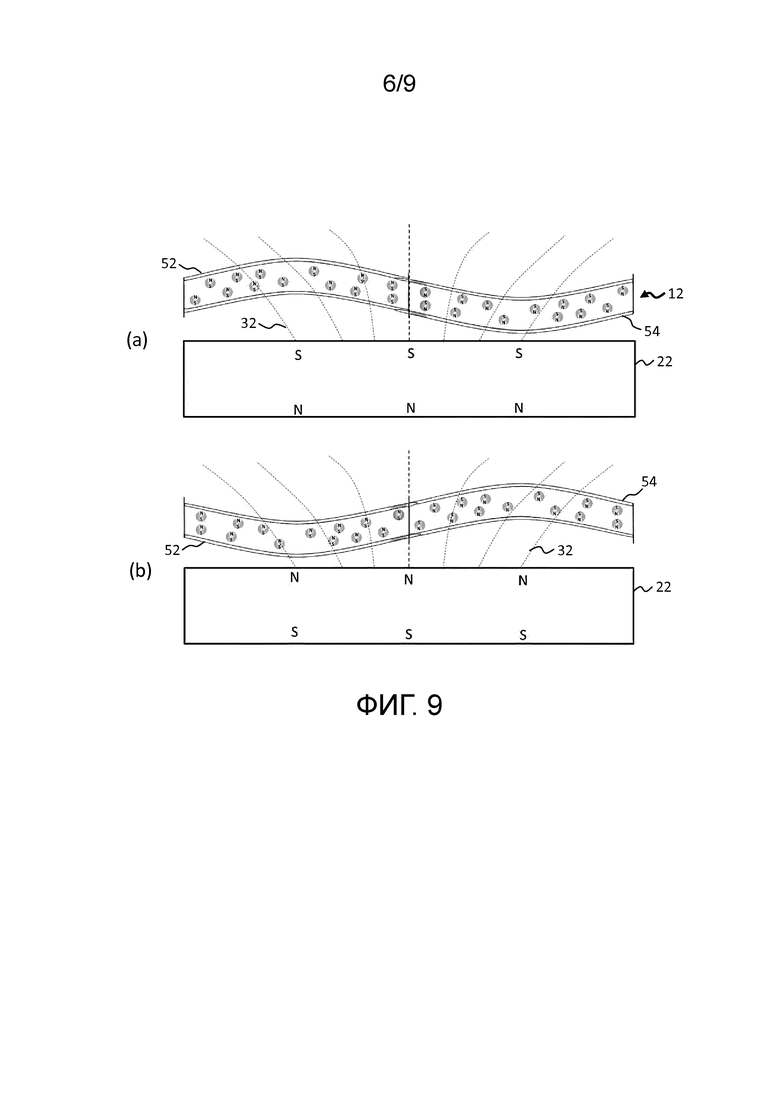



Использование: для осуществления движения и для восприятия движения. Сущность изобретения заключается в том, что устройство привода содержит элемент привода, содержащий электроактивный материал, выполненный с возможностью деформироваться в ответ на приложение электрического стимула, и частицы твердого магнитного материала, диспергированные в электроактивном материале и упорядоченные таким образом, что по меньшей мере фрагмент элемента привода проявляет намагничивание в заданном направлении; средство формирования магнитного поля, выполненное с возможностью формировать магнитное поле с управляемой диаграммой направленности по напряженности поля для приложения в пределах по меньшей мере фрагмента элемента привода; средство формирования электрического стимула; и контроллер, выполненный с возможностью управлять средством формирования магнитного поля и средством формирования электрического стимула скоординированным образом, тем самым реализуя один или более шаблонов деформации в элементе привода. Технический результат: обеспечение возможности улучшения рабочих характеристик активации привода и/или обеспечение возможности улучшения восприятия обратной связи относительно степени деформации привода. 2 н. и 13 з.п. ф-лы, 16 ил.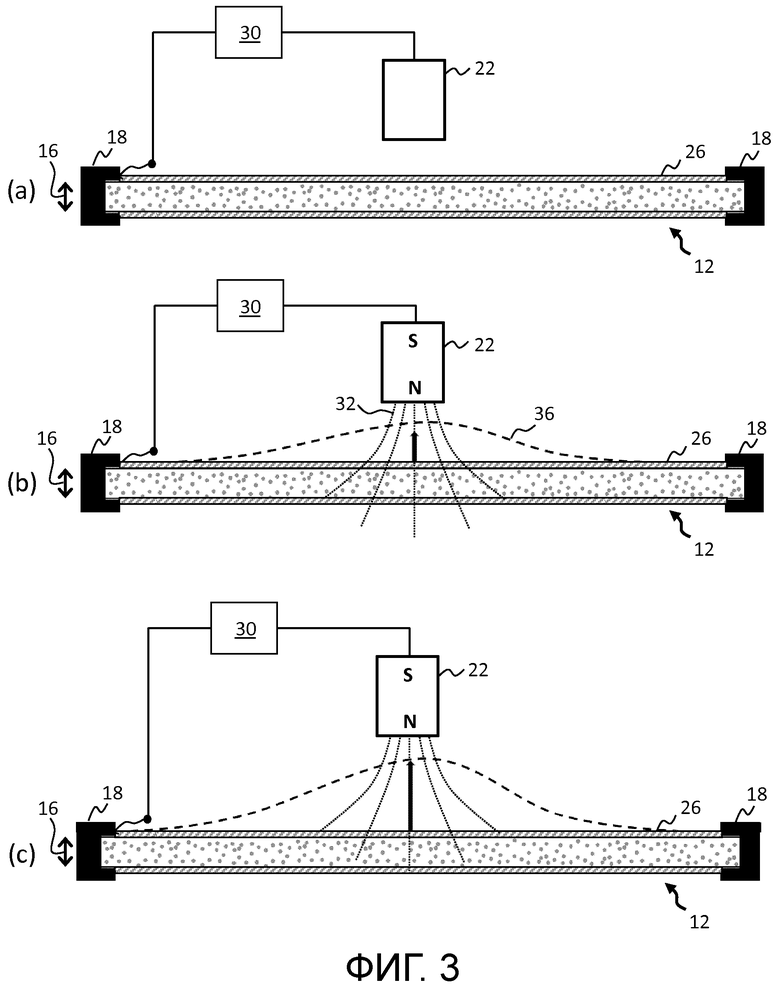
1. Устройство привода, содержащее:
элемент привода, содержащий:
электроактивный материал, выполненный с возможностью деформироваться в ответ на приложение электрического стимула, и
частицы твердого магнитного материала, диспергированные в электроактивном материале и упорядоченные таким образом, что по меньшей мере фрагмент элемента привода проявляет намагничивание в заданном направлении;
средство формирования магнитного поля, выполненное с возможностью формировать магнитное поле с управляемой диаграммой направленности по напряженности поля для приложения в пределах по меньшей мере фрагмента элемента привода;
средство формирования электрического стимула; и
контроллер, выполненный с возможностью управлять средством формирования магнитного поля и средством формирования электрического стимула скоординированным образом, тем самым реализуя один или более шаблонов деформации в элементе привода.
2. Устройство привода по п. 1, в котором:
средство формирования магнитного поля выполнено с возможностью формировать и прикладывать магнитное поле с неоднородной напряженностью поля в пределах элемента привода; и/или
частицы твердого магнитного материала диспергированы неоднородно в элементе привода;
таким образом, чтобы в любом случае достигнуть неоднородного шаблона деформации в пределах элемента привода.
3. Устройство привода по п. 2, в котором в случае, когда средство формирования магнитного поля выполнено с возможностью прикладывать магнитное поле с неоднородной напряженностью поля, упомянутое магнитное поле имеет линии магнитного поля, простирающиеся по меньшей мере по двум соседним фрагментам элемента привода в соответственно противоположных направлениях в отношении направления намагничивания элемента привода.
4. Устройство привода по любому из пп. 1-3, в котором упомянутое скоординированное управление включает в себя активацию обоих средств одновременно и/или включает в себя активацию обоих средств последовательно.
5. Устройство привода по любому из предыдущих пунктов, в котором контроллер выполнен с возможностью исполнять предопределенный план управления для управления деформацией элемента привода, при этом план управления включает в себя этапы для управления и средством формирования электрического стимула, и средством формирования магнитного поля, причем при необходимости упомянутый план управления включает в себя этапы, зависящие от одного или более входных параметров.
6. Устройство привода по любому из предыдущих пунктов, в котором упомянутые частицы твердого магнитного материала содержат по меньшей мере один из следующих материалов: твердый ферромагнитный материал; ферритовый материал, SmCo и NdFeB.
7. Устройство привода по любому из предыдущих пунктов, в котором упомянутый твердый магнитный материал является магнитострикционным материалом для реализации сокращения или расширения элемента привода в ответ на приложение магнитного поля средством формирования магнитного поля.
8. Устройство привода по п. 7, в котором средство формирования магнитного поля выполнено с возможностью формировать магнитное поле с однородной напряженностью поля для приложения в пределах элемента привода.
9. Устройство привода по любому из пп. 1-7, в котором средство формирования магнитного поля выполнено с возможностью формировать магнитное поле с неоднородной напряженностью поля для приложения в пределах элемента привода.
10. Устройство привода по п. 9, в котором контроллер выполнен с возможностью реализовывать изгиб элемента привода в направлении, антипараллельном по отношению к направлению намагничивания упомянутого по меньшей мере фрагмента элемента привода, посредством управления средством формирования магнитного поля для формирования магнитного поля с неоднородной напряженностью магнитного поля, имеющего линии магнитного поля, проходящие через элемент привода по существу в том же направлении, что и направление намагничивания.
11. Устройство привода по п. 9, в котором контроллер выполнен с возможностью реализовывать изгиб элемента привода в направлении, параллельном по отношению к направлению намагничивания упомянутого по меньшей мере фрагмента элемента привода, посредством управления средством формирования магнитного поля для формирования магнитного поля с неоднородной напряженностью магнитного поля, имеющего линии магнитного поля, проходящие через элемент привода в направлении, по существу противоположном направлению намагничивания.
12. Устройство привода по любому из пп. 9-11, в котором контроллер выполнен с возможностью реализовывать противоположно направленный изгиб в по меньшей мере двух соседних фрагментах элемента привода посредством управления средством формирования магнитного поля для формирования и приложения магнитного поля с неоднородной напряженностью поля в пределах элемента привода, имеющего линии магнитного поля, проходящие в пределах упомянутых соседних фрагментов в соответственно противоположных параллельных направлениях в отношении направления намагничивания элемента привода.
13. Устройство привода по п. 12, в котором контроллер выполнен с возможностью последовательно активировать магнитные поля для каждого из упомянутых соответствующих соседних фрагментов, чтобы тем самым реализовывать волнообразное движение в элементе привода.
14. Устройство привода по любому из предыдущих пунктов, в котором частицы твердого магнитного материала диспергированы неоднородно в элементе привода, чтобы достигнуть неоднородных шаблонов деформации,
и при этом частицы твердого магнитного материала размещены в наборе пространственно раздельных концентраций в элементе привода.
15. Способ активации привода, причем упомянутый способ использует элемент привода, содержащий:
электроактивный материал, выполненный с возможностью деформироваться в ответ на приложение электрического стимула, и
частицы твердого магнитного материала, диспергированные в электроактивном материале и упорядоченные таким образом, что по меньшей мере фрагмент элемента привода проявляет намагничивание в заданном направлении,
и при этом упомянутый способ содержит этап, на котором:
управляют средством формирования магнитного поля, выполненным с возможностью формировать магнитное поле с управляемой диаграммой направленности по напряженности поля, и средством формирования электрического стимула скоординированным образом, чтобы тем самым реализовать один или более шаблонов деформации в элементе привода.
| US 2010007245 A1, 14.01.2010 | |||
| US 2007008675 A1, 11.01.2007 | |||
| US 2010296294 A1, 25.11.2010 | |||
| US 2007216735 A1, 20.09.2007 | |||
| ЛИНЕЙНЫЙ ПЬЕЗОЭЛЕКТРИЧЕСКИЙ ДВИГАТЕЛЬ | 2009 |
|
RU2390090C1 |

