ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Это изобретение относится к исполнительным устройствам на основе электроактивных полимеров.
УРОВЕНЬ ТЕХНИКИ, К КОТОРОМУ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Электроактивные полимеры (electroactive polymer - EAP) являются новым классом материалов в области электрически управляемых материалов. EAP могут работать в качестве датчиков или исполнительных устройств и легко могут быть изготовлены в различных формах, допускающих легкую интеграцию в целый ряд систем.
Были разработаны материалы с такими характеристиками, как механическое напряжение и деформация срабатывания, которые были значительно улучшены за последние десять лет. Технологические риски были снижены до приемлемых для разработки изделий уровней, так что EAP становятся все более интересными с коммерческой и технической точек зрения. Преимущества EAP включают в себя низкую мощность, малый формфактор, гибкость, бесшумную работу, точность, возможность высокого разрешения, малое время срабатывания, и циклическое срабатывание.
Улучшенные характеристики и конкретные преимущества материалов на основе EAP обуславливают их пригодность к новым применениям.
Устройство на основе EAP может быть использовано в любом применении, в котором требуется малая величина перемещения компонента или элемента на основе электрического срабатывания. Подобным образом, эта технология может быть использована для считывания малых перемещений. Это изобретение относится, в частности, к исполнительным устройствам.
Использование EAP в исполнительных устройствах обеспечивает функции, которые были невозможны прежде, или обеспечивает большое преимущество перед обычными решениями исполнительных устройств, вследствие комбинации относительно большой деформации и усилия в малом объеме или тонком формфакторе, по сравнению с обычными исполнительными устройствами. Исполнительные устройства на основе EAP также обеспечивают бесшумную работу, точное электронное управление, быстрое срабатывание, и большой диапазон возможных частот срабатывания, например, 0-1 МГц, чаще всего менее 20 кГц.
Устройства, использующие электроактивные полимеры, могут быть подразделены на материалы с возбуждением полем и материалы с ионным возбуждением.
Примеры EAP с возбуждением полем включают в себя пьезоэлектрические полимеры, электрострикционные полимеры (такие как релаксорные полимеры на основе PVDF) и диэлектрические эластомеры. Другие примеры включают в себя электрострикционные графт-полимеры, электрострикционную бумагу, электреты, электро-вязкоупругие эластомеры и жидкокристаллические эластомеры.
Примерами EAP с ионным возбуждением являются сопряженные/проводящие полимеры, ионные полимерно-металлические композиционные материалы (Ionic Polymer Metal Composites - IPMC) и углеродные нанотрубки (carbon nanotube - CNT). Другие примеры включают в себя ионные полимерные гели.
Это изобретение относится, в частности, к исполнительным устройствам, которые включают в себя материал на основе EAP с возбуждением полем. Эти устройства приводятся в действие электрическим полем посредством прямой электромеханической связи. Вследствие их емкостной природы, им обычно требуются большие напряженности поля (вольт на метр), но низкие токи. Слои полимеров обычно являются тонкими, чтобы поддерживать как можно меньшее напряжение возбуждения.
Первым значительным подклассом EAP с возбуждением полем являются пьезоэлектрические и электрострикционные полимеры. В то время как электромеханические характеристики традиционных пьезоэлектрических полимеров являются ограниченными, прорыв в улучшении этих характеристик привел к созданию релаксорных полимеров на основе PVDF, которые демонстрируют спонтанную электрическую поляризацию (выравнивание с возбуждением полем). Эти материалы могут быть предварительно деформированы для улучшения характеристик в направлении деформации (предварительная деформация приводит к лучшему молекулярному выравниванию). Обычно используют металлические электроды, поскольку деформации обычно осуществляются в умеренном режиме (1-5%). Также могут быть использованы другие типы электродов (например, проводящие полимеры, масла, гели или эластомеры на основе углеродной сажи, и т.д.). Электроды могут быть непрерывными или сегментированными.
Другим интересным подклассом EAP с возбуждением полем является подкласс диэлектрических эластомеров. Тонкая пленка этого материала может быть расположена между деформируемыми электродами, образующими плоский конденсатор. В случае диэлектрических эластомеров, максвелловское механическое напряжение, индуцируемое приложенным электрическим полем, приводит к механическому напряжению на пленке, вызывающему ее сжатие по толщине и расширение по площади. Характеристики деформации обычно увеличиваются посредством предварительного деформирования эластомера (причем требуется каркас для удерживания предварительной деформации). Деформации могут быть значительными (10-300%). Это также ограничивает типы электродов, которые могут быть использованы: для малых и умеренных деформаций могут быть использованы металлические электроды и электроды на основе проводящих полимеров, для режима больших деформаций обычно используют масла, гели или эластомеры на основе углеродной сажи. Электроды могут быть непрерывными или сегментированными.
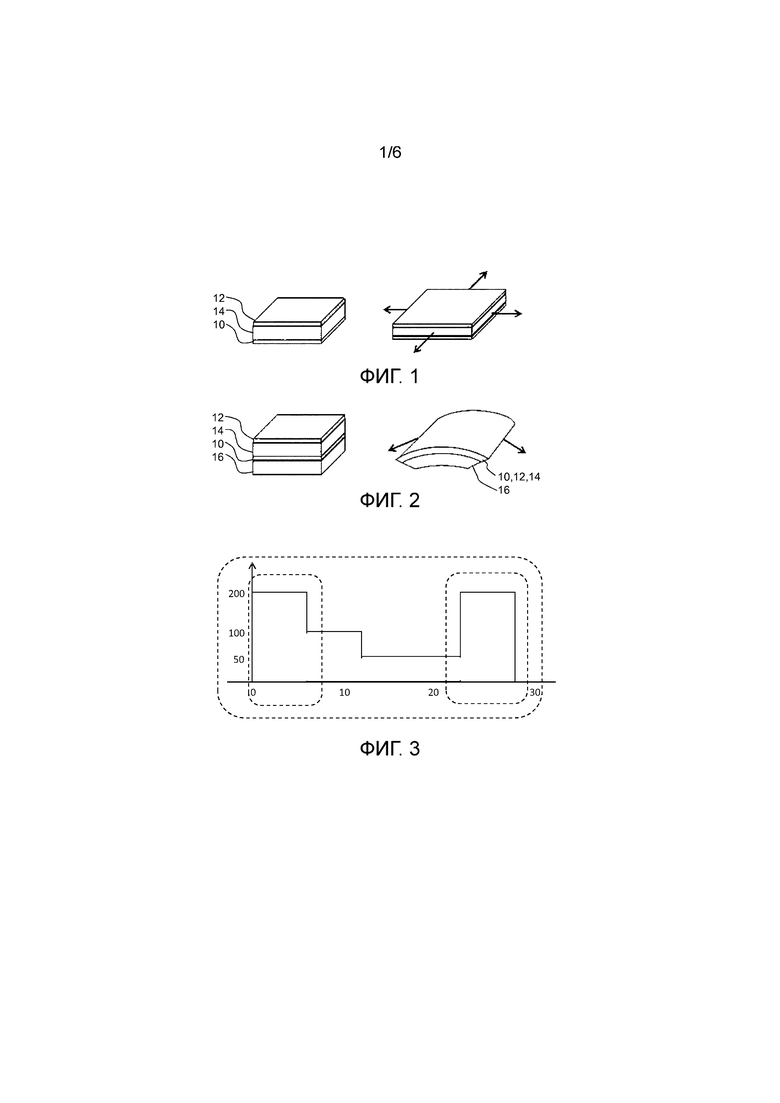
Фиг. 1 и 2 показывают два возможных режима работы устройства на основе EAP.
Устройство содержит слой 14 электроактивного полимера, расположенный между электродами 10, 12, расположенными на противоположных сторонах слоя 14 электроактивного полимера.
Фиг. 1 показывает устройство, которое не закреплено. Чтобы вызвать показанное расширение слоя электроактивного полимера во всех направлениях, используют напряжение.
Фиг. 2 показывает устройство, которое выполнено таким образом, что расширение возникает только в одном направлении. Это устройство поддерживается несущим слоем 16. Чтобы вызвать изгиб или выгиб слоя электроактивного полимера, используют напряжение.
Природа этого перемещения состоит, например, во взаимодействии между активным слоем, который расширяется при срабатывании, и пассивным несущим слоем. Для получения показанного асимметричного изгиба вокруг некоторой оси, может быть применена, например, молекулярная ориентация (растяжение пленки), усиливающая перемещение в одном направлении.
Расширение в одном направлении может быть результатом асимметрии полимера на основе EAP, или оно может быть результатом асимметрии свойств несущего слоя, или оно может быть результатом комбинации обоих факторов.
Одной проблемой, связанной с электроактивными полимерами с возбуждением полем, являются довольно высокие рабочие напряжения, которые требуются, как упомянуто выше, для обеспечения высоких напряженностей электрического поля в устройствах для реализации требуемых отклонений. Электронные схемы возбуждения используют для генерирования этих высоких напряжений и для выполнения другой обработки сигналов. Амплитуды напряжений возбуждения вплоть до 1 кВ требуются для этих EAP, так что должны использоваться и реализовываться высоковольтные устройства, значительно увеличивающие стоимость (и размер) электроники.
Вследствие своей природы, обычно EAP с возбуждением полем (т.е. возбуждаемые напряжением EAP) управляются источником (постоянного) напряжения. На EAP обеспечивают требуемое напряжение для достижения требуемой рабочей точки, а именно, требуемого механического отклонения. Однако во время экспериментальных исследований таких EAP было обнаружено, что хотя к EAP прикладывались идентичные напряжения, уровни механического срабатывания были разными, особенно в циклическом режиме работы. Это, конечно, может приводить к неприемлемым смещениям в конкретных применениях, где должны очень надежно достигаться очень точные уровни срабатывания.
Для компенсации этих смещений уровня срабатывания могут рассматриваться архитектуры с замкнутым контуром или конфигурации с прямой связью. Первый подход требует решений с обратной связью, таких как оптическая обратная связь, а второй подход может быть основан, например, на справочных таблицах, которые определяют режим компенсации. Оба решения требуют значительных издержек в терминах либо затрат и/либо пространства и/либо вычислительной мощности, и т.д.
Было бы желательно обеспечить работу EAP с возбуждением полем, которая позволит компенсировать в режиме реального времени смещения отклонения с меньшими издержками.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Вышеупомянутая потребность по меньшей мере частично удовлетворяется настоящим изобретением, определенным независимыми пунктами формулы изобретения. Зависимые пункты формулы изобретения обеспечивают предпочтительные варианты осуществления.
Примеры согласно одному аспекту настоящего изобретения обеспечивают исполнительное устройство для преобразования электрического входного сигнала в механическую мощность, содержащее:
исполнительное устройство на основе электроактивного полимера с возбуждением полем;
датчик тока для считывания тока, протекающего к исполнительному устройству на основе электроактивного полимера; и
схему управления для возбуждения исполнительного устройства на основе электроактивного полимера, причем схема управления содержит управляемый источник напряжения,
причем схема управления выполнена с возможностью управлять возбуждением исполнительного устройства в зависимости от считываемого тока, обеспечивать посредством этого заданную подачу заряда на исполнительное устройство на основе контроля тока для реализации конкретных изменений уровня срабатывания исполнительного устройства и, затем, поддерживать уровень срабатывания с использованием регулирования напряжения.
Это устройство включает в себя исполнительное устройство на основе EAP с возбуждением полем и, следовательно, на основе возбуждаемого напряжением EAP, но им управляют с использованием регулирования тока на основе контроля в режиме реального времени тока, обеспечиваемого для исполнительного устройства (и, следовательно, заряда, накапливаемого в нем). Таким образом, вместо управления исполнительными устройствами на основе EAP с возбуждением полем только источником напряжения, устройство управляется либо источником тока (и, например, постоянным напряжением в течение периода регулирования тока), либо регулированием напряжения, но на основе замкнутой системы автоматического управления на основе обратной связи с считыванием тока. Это позволяет компенсировать в режиме реального времени механические смещения срабатывания, особенно в циклических режимах работы.
Считывание тока (которое может быть основано на измерении тока или потока зарядов) имеет место, в частности, в течение интервалов срабатывания, когда существует изменение уровня срабатывания. В течение этого интервала существует изменение заряда, подаваемого на устройство или накопленного в нем. Во время работы в установившемся режиме, существует малый ток утечки, но было обнаружено, что различия заряда, подаваемого в течение интервалов срабатывания, коррелируются с конечным состоянием механического срабатывания, достигаемым исполнительным устройством. Таким образом, током можно управлять так, чтобы для каждого уровня срабатывания для EAP всегда обеспечивался корректный профиль тока или полный заряд для обеспечения в результате требуемого механического срабатывания.
Конкретные изменения, например, содержат срабатывание до конкретных уровней срабатывания. Например, срабатывание до состояния полной механической деформации может быть связано с конкретным требуемым потоком зарядов для исполнительного устройства.
Источник напряжения может быть, например, выполнен с возможностью подавать максимальное напряжение, составляющее по меньшей мере 50 В или по меньшей мере 100 В или по меньшей мере 200 В. Таким образом, исполнительное устройство является высоковольтным устройством с возбуждением полем и, следовательно, возбуждаемым напряжением устройством, которое обычно управляется только на основе прикладываемого напряжения.
Схема управления выполнена с возможностью обеспечивать заданную подачу заряда на исполнительное устройство на основе контроля тока для реализации изменения уровня срабатывания, и, затем, поддерживать уровень срабатывания с использованием регулирования напряжения. Таким образом, работа в установившемся режиме поддерживается общепринятым образом с использованием регулирования напряжения, что является желательным для устройства с возбуждением полем, поскольку это позволяет обеспечить лучшую компенсацию/допуск для потерь. Однако изменения уровня срабатывания дополнительно используют подход управления с обратной связью на основе тока.
Заданная подача заряда может быть обеспечена напряжением срабатывания, которое превышает уровень напряжения во время регулирования напряжения.
В одном наборе примеров, заданная подача заряда обеспечивается источником тока схемы управления. Таким образом, инжекция тока может быть использована для обеспечения подачи требуемого заряда для дополнения срабатывания до конкретного уровня. Источник тока, например, включает в себя источник напряжения. Источник напряжения подает амплитуду, достаточно высокую для наведения требуемого тока в устройстве, но достаточно низкую, чтобы не разрушить компонент, и ток затем управляется механизмом измерения тока для обеспечения управления с обратной связью.
Схема управления, следовательно, включает в себя источник тока, а также имеет управляемое напряжение. Это обеспечивает гибридный подход управления на основе тока и напряжения.
В другом наборе примеров, заданная подача заряда обеспечивается посредством настройки уровня напряжения источника напряжения схемы управления. В этом случае, существует замкнутая система управления с обратной связью по току, но прикладываемым напряжением управляют для осуществления требуемой инжекции тока.
Для ограничения зарядного тока, обеспечиваемого для исполнительного устройства, может быть обеспечена схема ограничения тока. Это предотвращает пики тока, которые могут сделать контроль заряда менее точным. Это может также улучшить срок службы материала на основе EAP.
Контроллер может быть дополнительно выполнен с возможностью контролировать значение сопротивления исполнительного устройства и адаптировать заданную подачу тока в ответ на контролируемое значение сопротивления. Это значение сопротивления может быть паразитным параллельным сопротивлением, которое относится к постоянному току утечки в состоянии установившегося режима исполнительного устройства. Посредством контроля этого тока при известном напряжении возбуждения может быть определено сопротивление, и это может быть использовано для адаптации схемы возбуждения для учета старения устройства.
Примеры согласно другому аспекту настоящего изобретения обеспечивают способ возбуждения исполнительного устройства на основе электроактивного полимера с возбуждением полем, содержащий этапы, на которых:
прикладывают напряжение к исполнительному устройству для изменения состояния срабатывания исполнительного устройства;
считывают ток, протекающий к исполнительному устройству; и
управляют срабатыванием исполнительного устройства в зависимости от считываемого тока, для обеспечения посредством этого заданной подачи заряда для конкретного изменения уровня срабатывания исполнительного устройства и, затем, поддерживают уровень срабатывания с использованием регулирования напряжения.
Способ может содержать этап, на котором прикладывают максимальное напряжение, составляющее по меньшей мере 50 В или по меньшей мере 100 В или по меньшей мере 200 В.
Заданная подача заряда может быть обеспечена с использованием источника тока или посредством настройки уровня напряжения источника напряжения. Способ может дополнительно содержать этап, на котором ограничивают зарядный ток, обеспечиваемый для исполнительного устройства. Дополнительно, способ может содержать этап, на котором контролируют значение сопротивления исполнительного устройства и адаптируют заданную подачу тока в ответ на контролируемое значение сопротивления.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Примеры настоящего изобретения будут теперь подробно описаны со ссылкой на сопутствующие чертежи, в которых:
Фиг. 1 показывает известное устройство на основе электроактивного полимера, которое не закреплено; Фиг. 2 показывает известное устройство на основе электроактивного полимера, которое ограничено защитным слоем;
Фиг. 3 показывает пример формы волны циклического срабатывания, используемой для иллюстрации механического дрейфа, который может возникнуть;
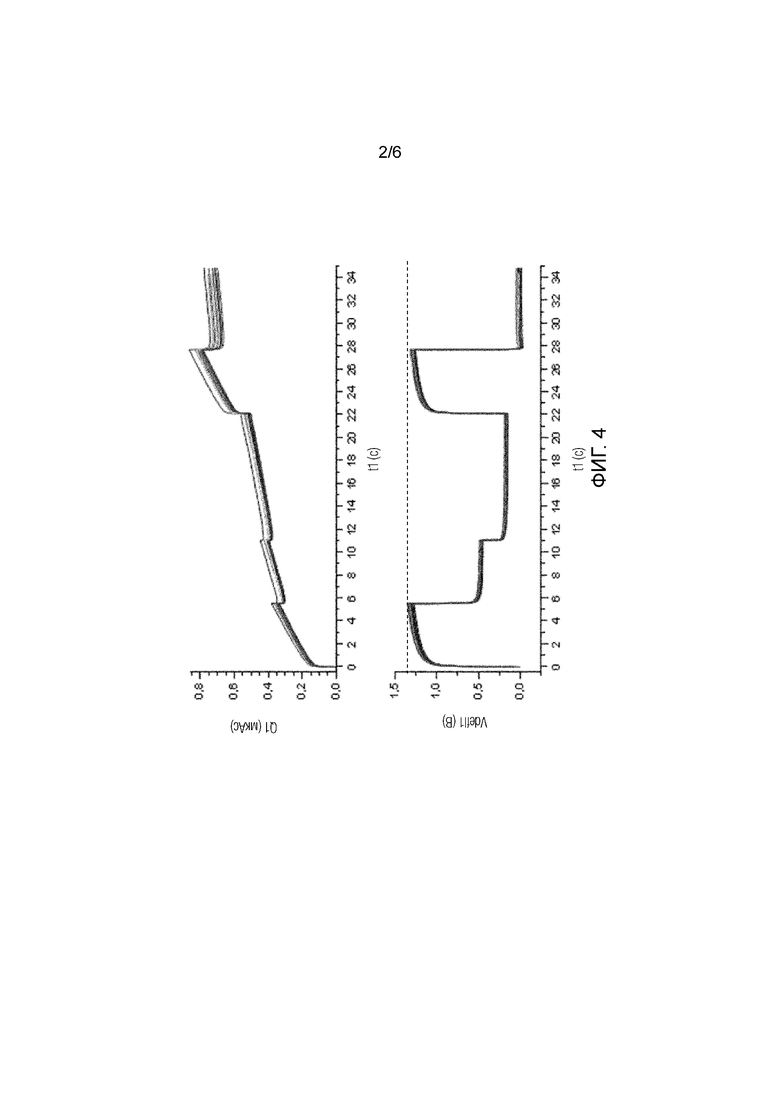
Фиг. 4 показывает результаты испытания исполнительного устройства с использованием формы волны фиг. 3;
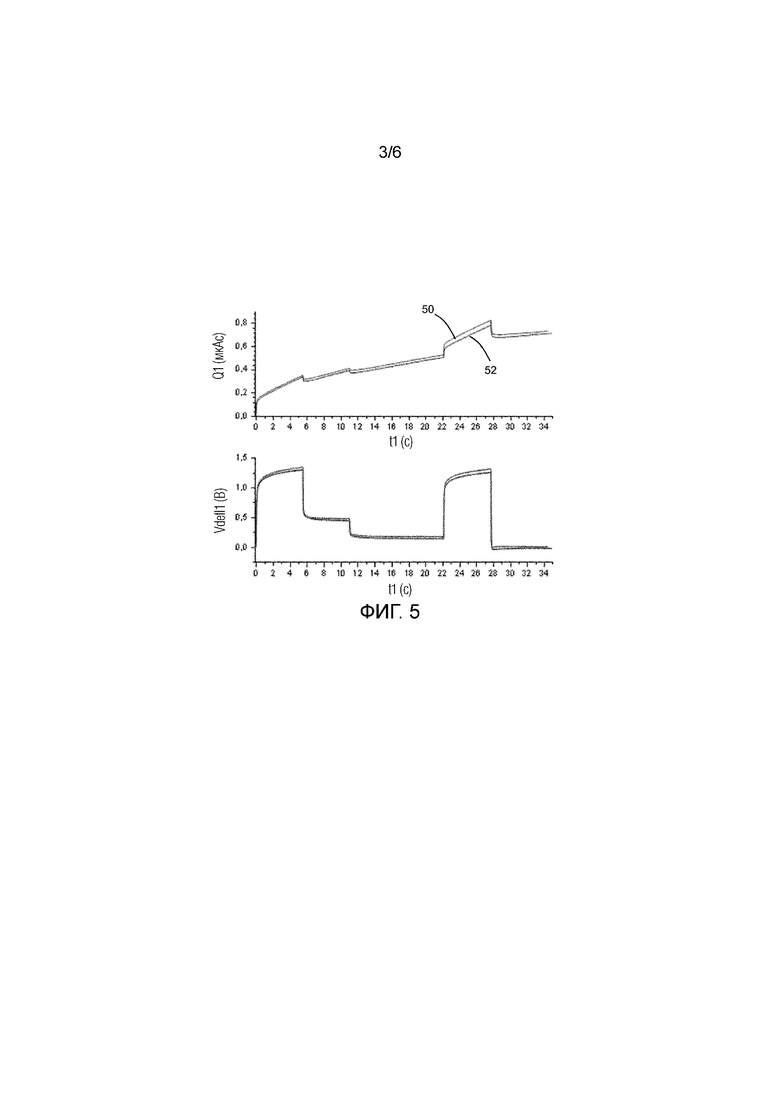
Фиг. 5 показывает заряд, подаваемый на EAP в течение двух периодов времени с максимальной амплитудой в пределах одного цикла;
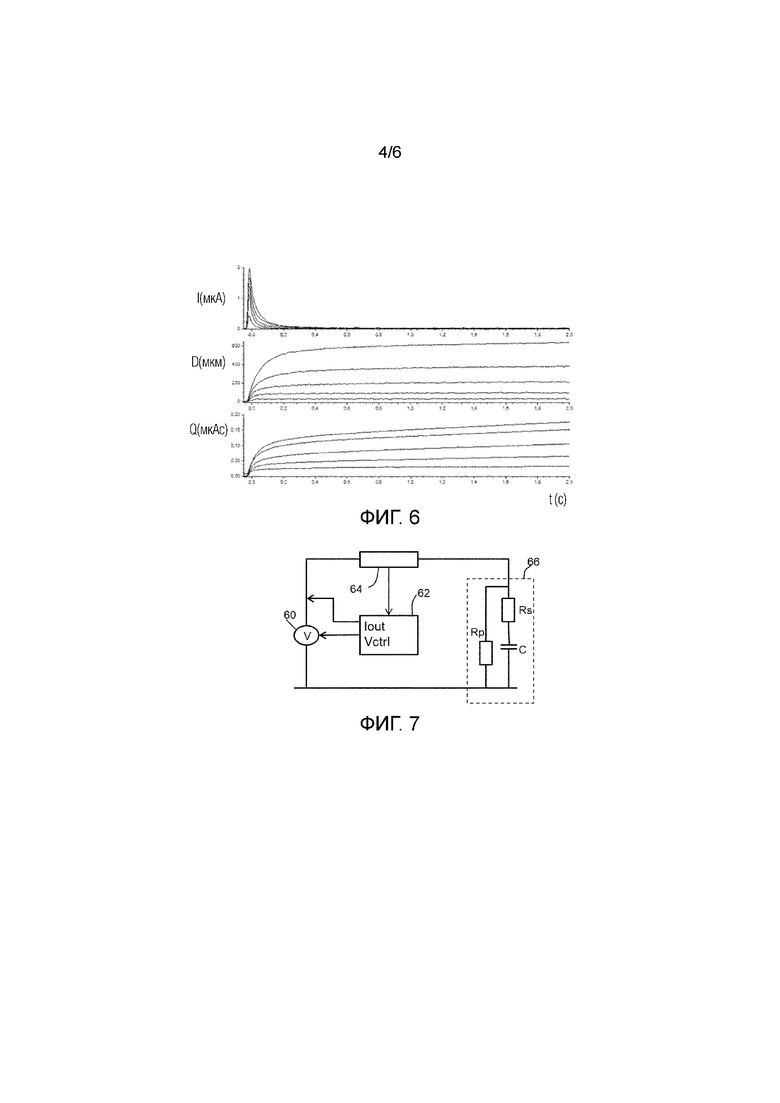
Фиг. 6 показывает отклик EAP на срабатывание в терминах заряда, тока и отклонения;
Фиг. 7 показывает схему управления для обеспечения регулирования напряжения и тока;
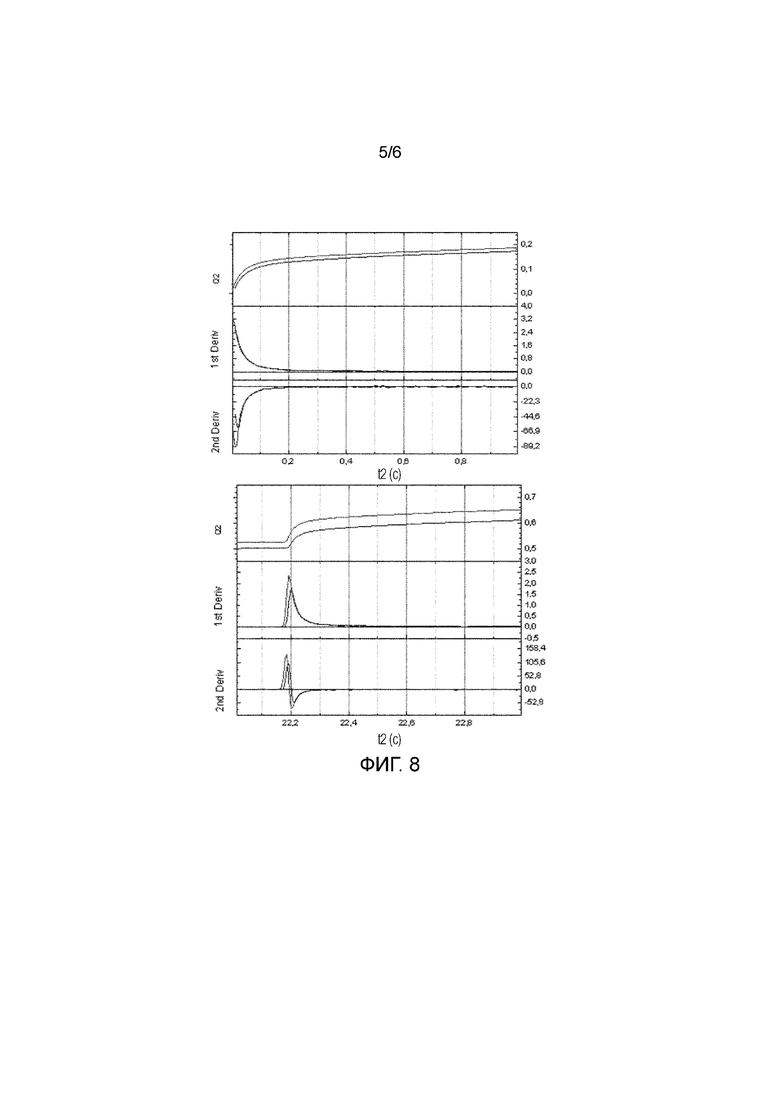
Фиг. 8 показывает формы волн производных для иллюстрации того, как может быть проанализирована важная стадия зарядки срабатывания;
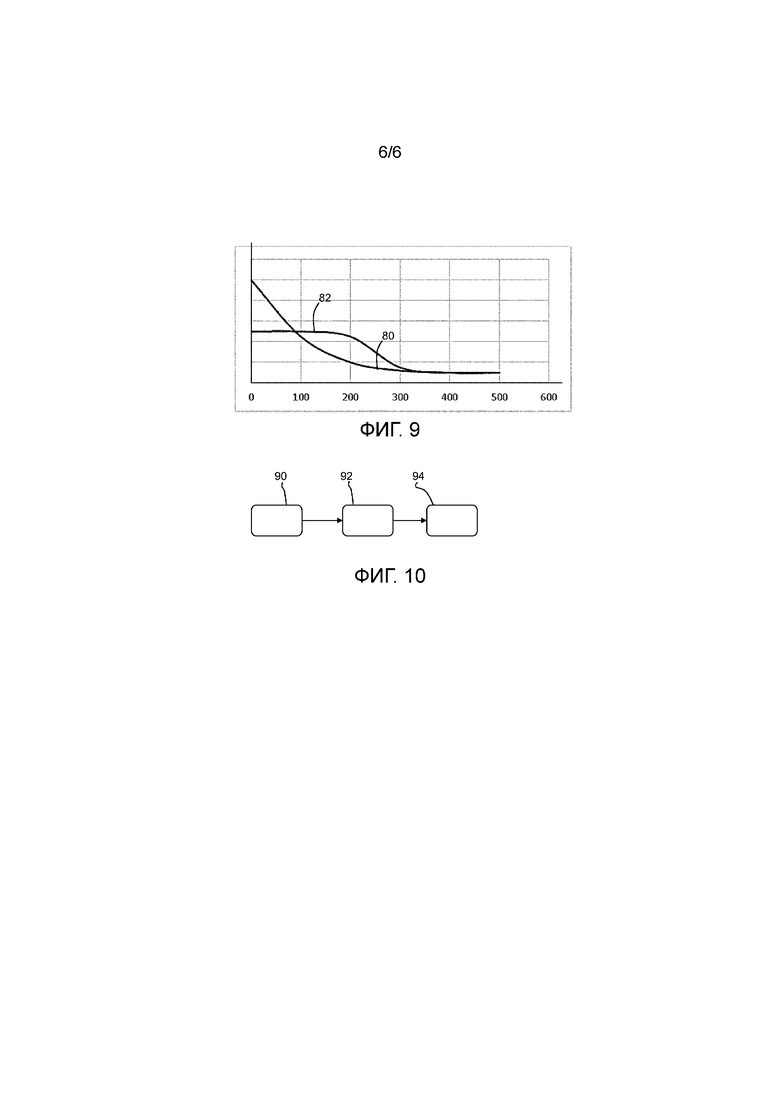
Фиг. 9 показывает, как может быть реализована ограниченная по току зарядка исполнительного устройства; и
Фиг. 10 показывает способ возбуждения исполнительного устройства на основе электроактивного полимера с возбуждением полем.
ПОДРОБНОЕ ОПИСАНИЕ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ
Настоящее изобретение обеспечивает исполнительное устройство на основе электроактивного полимера с возбуждением полем, которое снабжено датчиком тока для считывания тока, протекающего к исполнительному устройству. Схема управления используется для возбуждения исполнительного устройства, которое включает в себя источник напряжения. Возбуждением исполнительного устройства управляют в зависимости от считываемого тока, для обеспечения посредством этого заданной подачи тока для конкретных изменений уровня срабатывания исполнительного устройства. Это обеспечивает объединенную схему возбуждения на основе напряжении и тока для исполнительного устройства на основе возбуждаемого напряжением EAP, и это позволяет обеспечить более надежное повторение механических перемещений исполнительного устройства.
В общих чертах, исполнительные устройства на основе электроактивных полимеров (EAP) с возбуждением полем состоят из электрически изолирующего материала, встроенного между двумя электрически проводящими электродами. В зависимости от прикладываемого напряжения, электрическое поле между электродами вызывает механическую деформацию EAP. Как объяснено выше, посредством использования дополнительных материалов с отличным коэффициентом удлинения (например, жесткостью) для EAP-слоя, механическая деформация может быть направлена в некоторых направлениях. Посредством реализации многослойной технологии может быть увеличена напряженность поля между электродами, и, следовательно, меньшие амплитуды напряжения потребуются для работы исполнительного устройства на основе EAP, или могут быть реализованы большие механические деформации.
Это изобретение относится к проблеме, состоящей в том, что заданный профиль срабатывания на основе напряжения может вызывать отличные уровни механического срабатывания, вызывающие, таким образом, механическое смещение.
Механическое смещение будет теперь описано посредством набора измерений, которые были выполнены с использованием стандартного исполнительного устройства на основе EAP с возбуждением полем. Образец приводили в действие согласно произвольной циклической схеме, причем адресовались отличные уровни срабатывания, как показано на фиг. 3.
Начиная с состояния несрабатывания (что равносильно отсутствию напряжения срабатывания, прикладываемого к исполнительному устройству на основе EAP), исполнительное устройство приводили в действие напряжением, составляющим 200 В, после чего следовало уменьшенное напряжение срабатывания, составляющее 100 В и 50 В, соответственно, а также второе максимальное напряжение, составляющее 200 В. В конце концов, исполнительное устройство на основе EAP деактивировали посредством уменьшения прикладываемого напряжения до нуля.
Хотя конкретный цикл выбирали произвольно, он представляет типичный цикл срабатывания в применении, где в течение некоторого интервала времени должны быть использованы отличные уровни срабатывания между минимальным (деактивированным) уровнем и уровнем локального максимума. Во время эксперимента, этот цикл применяли к исполнительному устройству на основе EAP непрерывно (14 раз).
Фиг. 4 показывает полные результаты испытаний. Прикладываемое напряжение показано на фиг. 3 (и синхронизацию относительно двух графиков фиг. 4 можно ясно увидеть из нижнего графика фиг. 4). Верхний график показывает суммарный заряд, наведенный в устройстве, и нижний график показывает уровень механического срабатывания (в виде напряжения, записываемого зондом измерения отклонения).
Для удобства представления показан один цикл, начинающийся при t=0. Хотя обеспечивалась непрерывная работа, каждый цикл представлен как начинающийся при t=0 и Q=0, так что каждый график показывает перекрытие 14 отличных кривых, причем каждая кривая содержит один из циклов. Это позволяет обеспечить хорошее сравнение любых различий уровней срабатывания.
Расхождение между отличными графиками показывает, что отклик исполнительного устройства не остается согласованным с течением времени.
Особый интерес представляет уровень механического срабатывания, достигаемый при приложении максимального напряжения, составляющего 200 В, к исполнительному устройству на основе EAP. В пределах одного цикла это имеет место во время начального импульса и конечного импульса.
Нижний график показывает типичное малое изменение в нулевом (нормальном) положении, когда никакое напряжение не прикладывается к исполнительному устройству на основе EAP, при котором нулевой уровень является толстой линией - что указывает на то, что упомянутые 14 кривых имеют немного отличные нулевые значения. Существуют также малые изменения срабатывания при отличных уровнях срабатывания.
Однако фиг. 4 также показывает, что амплитуда второго импульса максимального срабатывания в пределах каждого цикла (200 В для каждого цикла) приводит к немного меньшей амплитуде отклонения, чем первый импульс в пределах каждого отдельного цикла. Это можно увидеть по пунктирной линии, которая поясняет общее уменьшение уровня механического возбуждения между первым и вторым импульсами. Смещение составляет около 0,05 В (что для чувствительности к отклонению, составляющей 0,8 мм/В, соответствует 40 мкм). Это имеет место, даже если одинаковое напряжение возбуждения, составляющее 200 В, прикладывается к исполнительному устройству на основе EAP.
Можно увидеть, что проблема возникает, в частности, тогда, когда существуют быстрые изменения уровня срабатывания, поскольку показано, что первый максимальный импульс следующего цикла возвращается обратно к требуемому уровню.
Явную корреляцию с этим эффектом можно наблюдать посредством анализа верхнего графика, показывающего заряд, наводимый в исполнительном устройстве на основе EAP.
Верхняя часть фиг. 5 показывает заряд, подаваемый на исполнительное устройство на основе EAP в течение двух последовательных циклов. График 50 является зарядом, подаваемым в течение первого цикла, и график 52 является зарядом, подаваемым в течение второго цикла. Различие в подаваемом заряде является наиболее заметным во время второго высокоамплитудного импульса. Это вызывает изменение уровня механического срабатывания с течением времени, наиболее заметное во время второго высокоамплитудного импульса цикла, как можно увидеть на нижней части фиг. 5.
Для компенсации этого эффекта, амплитуда возбуждения второго максимального импульса срабатывания в пределах одного цикла может быть немного увеличена, чтобы сделать его большим по напряжению, чем первый импульс. Однако ясно, насколько большей должна быть амплитуда напряжения.
Смещение амплитуды возбуждения может быть сгенерировано на основании измерения в режиме реального времени отклонения (и соответствующей замкнутой системы автоматического управления) или на основе справочной таблицы. В то время как первое решение требует значительных издержек на измерение и управление, второе решение требует подробного охарактеризования компонента перед применением для генерирования такой справочной таблицы.
Это изобретение основано на объединении подхода с обратной связью с считыванием тока (например, способа возбуждения источником тока) со способом высоковольтного срабатывания для обеспечения более однородного отклика-отклонения исполнительного устройства.
Например, исполнительное устройство на основе возбуждаемого напряжением EAP может быть приведено в действие (по меньшей мере частично) источником тока вместо источника напряжения. В этом случае ток (т.е. поток зарядов) может измеряться во время каждого цикла срабатывания или части цикла срабатывания, и система управления может быть выполнена с возможностью обеспечивать, чтобы каждый импульс (т.е. цикл срабатывания или часть цикла срабатывания) имел одинаковый профиль или одинаковую общую инжекцию зарядов в исполнительное устройство на основе EAP. Ток может быть легко измерен посредством известных решений, например, посредством измерения падения напряжения на малом токочувствительном резисторе, присоединенном последовательно исполнительному устройству на основе EAP.
Это управление потоком зарядов имеет место во время частей профиля срабатывания, где существуют изменения уровня срабатывания. Между этими частями профиля срабатывания могут существовать периоды времени, в течение которых поддерживается предыдущий конечный уровень срабатывания. В течение этих интервалов времени, регулирование напряжения используется для поддержания состояния срабатывания. Таким образом, профиль срабатывания имеет первые периоды (профилированная часть цикла срабатывания, во время которой осуществляются изменения уровня срабатывания) и вторые периоды между первыми периодами. Вторые периоды, например, имеют большую длительность, чем первые периоды, так что существует циклический управляющий сигнал чередующихся фаз настройки и фаз фиксации состояния.
Фиг. 6 показывает отклик EAP на срабатывание в терминах заряда, тока и отклонения в ответ на постоянные напряжения срабатывания, прикладываемые в момент времени t=0. Напряжения срабатывания составляют 40 В, 80 В, 120 В, 160 В и 200 В. Верхняя часть показывает ток, протекающий в EAP, средняя часть показывает отклонение, и нижняя часть показывает накапливаемый заряд. На всех графиках, наивысший график (т.е. наибольший ток, отклонение и заряд) соответствует наибольшему напряжению срабатывания (т.е. 200 В), и самый нижний график соответствует наименьшему напряжению срабатывания (т.е. 40 В).
Фиг. 6 показывает, что для этой конструкции исполнительного устройства, по прошествии около 300 мс наклон заряда становится постоянным и линейным и затем следует за наклоном механической деформации. Очень малый дополнительный ток протекает после этого момента времени. Было обнаружено, что общая амплитуда деформации, считанная по прошествии 45 секунд, составляет 800 мкм (для Vdc= 200 В).
В момент времени 300 мс, отклонение при срабатывании 200 В уже достигло 600 мкм. Таким образом, можно увидеть, что регулирование заряда может быть использовано в течение относительно короткого периода, и затем ему на смену может прийти регулирование напряжения.
Одна возможная схема управления состоит в том, чтобы после того, как наклон графика заряда (который, конечно, является током) станет постоянным или станет равным нулю, система может переключиться на режим работы с возбуждением по напряжению. Для тока может быть установлен порог, и всегда, когда ток падает ниже некоторого порога, может быть выбрано регулирование напряжения. Порог может, например, составлять 10% (для этого конкретного примера) от максимальной амплитуды тока.
Переключение на регулирование на основе напряжения, после регулирования требуемого изменения отклонения, является желательным, поскольку регулирование напряжения может обеспечить допустимые потери, например, потери, вызываемые параллельными механизмами потерь, являющимися следствием несовершенной изоляции материала. Эти потери являются температурно-зависимыми и непредсказуемыми и, следовательно, их трудно компенсировать с использованием регулирования тока. Вместо этого, эти потери автоматически компенсируются регулированием напряжения, поскольку любое изменение тока (вследствие переменных потерь) будет перекрыто источником постоянного напряжения. Таким образом, регулирование напряжения требуется для общей работы устройств на основе EAP с возбуждением полем, и регулирование тока используется только в качестве временной меры для улучшения точности, с которой можно управлять отклонением.
Фиг. 7 показывает схему управления. Существует управляемый источник 60 напряжения и контроллер 62 для обеспечения управляющего напряжения Vctrl для источника напряжения. Он может также обеспечивать инжекционный ток Iout, как будет описано ниже. Во всех примерах, существует замкнутая система автоматического управления по току, дополнительно к возбуждению исполнительного устройства напряжением.
Контроллер 62 принимает измерение тока от датчика тока, такого как токочувствительный резистор 64, присоединенный последовательно к исполнительному устройству на основе EAP. Исполнительное устройство на основе возбуждаемого напряжением EAP показано в виде своей эквивалентной схемы 66, состоящей из емкости С с последовательным сопротивлением Rs и параллельного сопротивления Rp, параллельного паре резистор-конденсатор Rs,C. Контроллер выполнен с возможностью контролировать форму профиля тока посредством контроля тока с течением времени. Это может быть также использовано для контроля заряда, накапливаемого на исполнительном устройстве с течением времени.
Эквивалентная схема 66 является первым приближением исполнительного устройства на основе возбуждаемого напряжением EAP. Параллельный резистор Rp является большим, вносящим потери резистором по сравнению с последовательным резистором. Малый ток будет протекать через параллельный резистор Rp, так что электрический ток, который фактически способствует механическому срабатыванию, будет немного меньшим, чем общий измеряемый ток. Чтобы сделать регулирование заряда еще более точным, процесс зарядки может быть отделен от установившегося режима работы (когда только малый ток протекает через параллельный резистор). Этот малый ток может быть затем определен, и, следовательно, может быть более точно определен динамический профиль тока.
Это может быть обеспечено посредством исследования наклона тока через исполнительное устройство на основе EAP.
На фиг. 4 и фиг. 5 можно ясно увидеть, что во время первой части (около 200 мс) формы волны заряда, наклон отличается от последующего наклона, который по существу является линейным (постоянным) наклоном. Таким образом, наклон профиля заряда, на основе анализа производной первого или более высоких порядков, может быть использован для разделения стадии зарядки и (квази-) установившегося режима работы. Различия в форме формы волны возникают во время стадии зарядки, и, следовательно, для этой стадии зарядки требуется компенсация.
Обычно, параллельное сопротивление находится в диапазоне около 10 МОм, так что при 200 В ток, составляющий 200В/10МОм=20мкА, протекает через этот параллельный резистор.
Фиг. 8 показывает формы волн производных для иллюстрации того, как может быть проанализирована важная стадия зарядки срабатывания.
Верхняя часть показывает характеристики зарядки для первого высокого импульса формы волны возбуждения (фиг. 3), и нижняя часть показывает характеристики зарядки для второго высокого импульса формы волны возбуждения.
В обеих частях, верхний график показывает проинтегрированный ток (т.е. заряд), протекающий в исполнительном устройстве на основе EAP в течение секунды первой части соответствующего 200В-импульса (верхняя часть показывает 1с первого импульса, и нижняя часть показывает 0,8с второго импульса, а также предыдущие 0,2с).
Изменение заряда можно наблюдать во время перехода от нижнего состояния срабатывания к более высокому состоянию срабатывания. Больший заряд соответствует большему отклонению.
Средний график показывает первую производную, т.е. уровень тока. Нижний график показывает вторую производную, т.е. производную тока.
Стадия зарядки может быть, таким образом, идентифицирована в виде периода перед тем, как вторая производная достигнет нуля (т.е., после этого ток является постоянным), и управление с обратной связью может быть тогда основано на создании дополнительного потока зарядов для компенсации изменения заряда (т.е. разницы между двумя графиками в верхнем изображении каждой части) в это время. После обеспечения дополнительного компенсирующего заряда, исполнительное устройство будет переходить к корректному отклику установившегося режима.
Настоящее изобретение использует источник напряжения для возбуждения исполнительного устройства (что является общепринятым), но схема управления выполнена с возможностью реализовывать управление в зависимости от считываемого тока. Таким образом, заданный профиль тока, или общий электрический ток, может быть обеспечен для конкретных изменений уровня срабатывания исполнительного устройства.
В одном примере, ток считывают, и прикладываемое напряжение настраивают посредством замкнутой системы автоматического управления. Таким образом, по существу не существует источника тока, а ток регулируют посредством регулирования напряжения.
Альтернативой является обеспечение транзистора последовательно токочувствительному резистору таким образом, чтобы ток через исполнительное устройство на основе EAP мог регулироваться транзистором. В этом случае, источник напряжения может иметь постоянную амплитуду напряжения в течение периода регулирования тока, которая должна быть достаточно высокой для подачи требуемого тока. Источник напряжения обеспечивает напряжение, достаточно высокое для подачи требуемого тока (например, равное максимальному напряжению, которое может быть приложено к исполнительному устройству на основе EAP без его разрушения). Ток через EAP, тогда, регулируется посредством последовательного транзистора, который функционирует в качестве переменного резистора. Он имеет ту же самую функцию, что и уменьшение напряжения источника напряжения.
Регулирование тока может иметь место для всех событий срабатывания до максимального уровня срабатывания с низкого уровня срабатывания, как объяснено выше. Для перехода с одного уровня на максимальный уровень (например, первый высокий импульс фиг. 3, который имеет переход от 0% до 100%) могут потребоваться инжекции зарядов, отличные от инжекций зарядов для перехода с другого уровня на максимальный уровень (например, второй высокий импульс фиг. 3, который имеет переход от 25% до 100%). Требуемая инжекция зарядов может быть получена посредством экстраполяции на основании требуемой инжекции тока для полного (от 0% до 100%) этапа срабатывания, которая может быть запомнена в базе данных.
Однако способ может быть продолжен таким образом, чтобы он включал в себя регулирование тока во время промежуточных срабатываний (в том числе срабатываний, которые не достигают полного 100%-уровня). Это снова может быть основано на интерполяции между промежуточными уровнями срабатывания.
Если изменение уровня срабатывания является очень малым, то такое точное регулирование может не потребоваться.
В пределе, непрерывное измерение потока зарядов может иметь место таким образом, чтобы полное управление исполнительным устройством было основано на регулировании тока, а также на регулировании напряжения.
Можно ускорить механическое отклонение посредством использования перерегулирования напряжения. Этот подход также может быть использован. Например, исполнительное устройство на основе EAP может управляться более высоким напряжением в течение короткого интервала времени, в течение которого ток измеряется в режиме реального времени. После подачи требуемого заряда амплитуда напряжения может быть затем уменьшена, или может быть изменено падение напряжения на последовательном токоограничивающем элементе.
При установке требуемого профиля электрического тока для заданного перехода (например, от 0% до 100%), требуемый электрический ток задается заранее, например, обеспечивается в спецификации. Система обучения может быть использована для улучшения характеристик системы. Как упомянуто выше, изменение заряда можно наблюдать во время фазы перехода, в то время как при работе в установившемся режиме не генерируется никаких дополнительных смещений, поскольку кривые являются параллельными. Таким образом, необходимо только обеспечить, чтобы общий поток зарядов достигал требуемого значения за короткое время, которое является не намного большим, чем время самого перехода, до тех пор, пока производные заряда не станут постоянными или почти постоянными. Таким образом, может потребоваться, чтобы замкнутая система управления с обратной связью по току работала только с малым рабочим циклом, в переходные моменты времени, и нормальное регулирование напряжения может быть использовано в другие моменты времени.
Существуют различные пути реализации стратегии управления.
Первый пример использует источник тока в качестве части контроллера 62 (на фиг. 6). Источник тока используют, чтобы гарантировать то, что одинаковый требуемый уровень срабатывания будет всегда достигаться, посредством обеспечения того, чтобы одинаковый заряд наводился в устройстве. В зависимости от времени, с течением времени контролируют зарядный ток/заряд, входящий в исполнительное устройство на основе возбуждаемого напряжением EAP, а также выходящий разрядный ток/заряд.
EAP может быть приводиться в действие высоким рабочим напряжением до тех пор, пока требуемый заряд не будет наведен в устройстве. Начальное напряжение срабатывания во время срабатывания (т.е. при изменении установочного параметра исполнительного устройства) может быть немного большим, чем напряжение срабатывания, обычно используемое для требуемого уровня срабатывания. Однако при достижении требуемого уровня заряда, напряжение может быть уменьшено обратно до нормального рабочего напряжения, связанного с адресуемым уровнем срабатывания.
В основном примере, описанном выше, существует прямое регулирование электрического тока, а также регулирование напряжения.
Во втором примере, исполнительное устройство возбуждают стандартным напряжением, связанным с требуемым установочным параметром исполнительного устройства. Затем контролируют ток, и малая компенсация напряжения может быть затем применена на основе контролируемого тока. Это используют для точной настройки механического срабатывания. Это может потребовать малой справочной таблицы для преобразования между требуемым током и необходимым дополнительным напряжением компенсации, но потребуется только несколько записей, поскольку коррекция является также малой.
В третьем примере, исполнительное устройство на основе EAP снова управляется требуемым рабочим напряжением, в то время как ток контролируется. Если контроллер распознает различие в заряде в идентичных заданных точках срабатывания, то напряжение возбуждения будет дополнительно увеличиваться (или уменьшаться) до тех пор, пока одинаковый заряд не будет наводиться в исполнительном устройстве на основе EAP. В этом случае заряд, накапливаемый во время предыдущего уровня срабатывания, должен записываться и запоминаться контроллером.
Второй пример, описанный выше, например, использует справочную таблицу для точной настройки, и третий пример использует исторические данные для компенсации, дополнительно, например, эффектов старения. Система может реализовывать обучение таким образом, чтобы заряд, требуемый для достижения равносильных заданных точек, запоминался и усреднялся с течением времени. Это позволяет обеспечить улучшенную воспроизводимость с течением времени.
В четвертом примере (который может быть объединен с любым из других примеров, приведенных выше), ограниченный ток подается при возбуждении исполнительного устройства.
Фиг. 9 показывает ограниченную по току зарядку EAP. График 80 показывает стандартную кривую зарядки, и график 82 показывает ток ограниченной по току зарядки. Для этой цели, в контроллер 62 устанавливается схема с ограничителем тока, которая обеспечивает то, что зарядный ток не будет превышать некоторое значение. Это имеет дополнительное преимущество, состоящее в том, что регулирование тока является более точным, поскольку предотвращается начальный пик тока (во время начального пика тока, контроль тока должен обеспечиваться с высоким разрешением для предотвращения неточностей заряда и смещения). Это имеет преимущество, состоящее в ограничении избыточного тока в исполнительном устройстве на основе EAP, что может улучшить срок службы материала на основе EAP. При хорошем выборе ограничения скорости, задержка срабатывания является ограниченной и приемлемой (в зависимости от применения).
В пятом примере (который может быть объединен с любым из других примеров, приведенных выше), обеспечивается некоторая компенсация старения EAP. Одними из непредсказуемых элементов EAP могут быть значения резисторов в эквивалентной схеме. В частности, значение сопротивления, как правило, изменяется вследствие деградации материала на основе EAP с течением времени.
При изменениях значения сопротивления, общий ток, который необходим для наведения некоторого заряда в EAP, также изменяется. На основе вышеупомянутого способа, значения сопротивления могут быть определены на основе анализа профилей тока и известных напряжений.
Система может тогда предсказывать, на основе изменений значения (значений) сопротивления с течением времени, каким должен быть оптимальный инжектируемый ток на EAP для получения требуемого заряда на EAP и соответствующего смещения.
Наиболее простая реализация настоящего изобретения может использовать двухуровневый источник напряжения (включаемый или выключаемый) с управлением источником тока для обеспечения точной настройки при переходах от включения к выключению. Однако предпочтительным является многоуровневое управление, в случае которого могут быть образованы более сложные профили срабатывания (показанные выше).
Формы волн срабатывания могут быть определены заранее, например, для циклической работы, в случае которой переходы, которые будут иметь место, являются известными, и управление с обратной связью по току может быть получено во время калибровки или на основании базы данных, обеспечиваемой при изготовлении. Альтернативно, уровнем возбуждения можно управлять динамически, либо на основе управления с обратной связью с использованием считывания, либо на основе пользовательских входных данных. Замкнутая система управления с обратной связью по току может тогда работать динамически в ответ на конкретные переходы возникающего уровня возбуждения исполнительного устройства.
Фиг. 10 показывает способ возбуждения исполнительного устройства на основе электроактивного полимера с возбуждением полем, содержащий:
этап 90, на котором прикладывают напряжение к исполнительному устройству для изменения состояния срабатывания исполнительного устройства;
этап 92, на котором считывают ток, протекающий к исполнительному устройству; и
этап 94, на котором управляют срабатыванием исполнительного устройства в зависимости от считываемого тока, для обеспечения посредством этого заданной подачи тока для конкретного изменения уровня срабатывания исполнительного устройства.
Материалы, пригодные для EAP с возбуждением полем, являются общеизвестными.
Электроактивные полимеры включают в себя, но не ограничены этим, подклассы: пьезоэлектрических полимеров, электромеханических полимеров, релаксорных сегнетоэлектрических полимеров, электрострикционных полимеров, диэлектрических эластомеров, жидкокристаллических эластомеров.
Подкласс электрострикционных полимеров включает в себя, но не ограничен этим:
поливинилиденфторид (Polyvinylidene fluoride - PVDF), поливинилиденфторид - трифторэтилен (Polyvinylidene fluoride - trifluoroethylene - PVDF-TrFE), поливинилиденфторид - трифторэтилен - хлорфторэтилен (Polyvinylidene fluoride - trifluoroethylene - chlorofluoroethylene - PVDF-TrFE-CFE), поливинилиденфторид - трифторэтилен - хлортрифторэтилен (Polyvinylidene fluoride - trifluoroethylene - chlorotrifluoroethylene - PVDF-TrFE-CTFE), поливинилиденфторид - гексафторпропилен (Polyvinylidene fluoride - hexafluoropropylene - PVDF - HFP), полиуретаны или их смеси.
Подкласс диэлектрических эластомеров включает в себя, но не ограничен этим:
акрилаты, полиуретаны, силоксаны.
Если осажденные гальваническим способом электроды будут расположены в несимметричной конфигурации, то прикладываемое напряжение может вызывать все виды деформаций, такие как кручение, свертывание, закручивание, изгиб и деформация несимметричного изгиба.
Во всех этих примерах, дополнительные пассивные слои могут быть обеспечены для оказания влияния на электрическое и/или механическое поведение слоя на основе EAP в ответ на прикладываемое электрическое поле.
Слой на основе EAP каждого блока может быть расположен между электродами. Электроды могут быть растяжимыми, чтобы они следовали за деформацией слоя материала на основе EAP. Материалы, пригодные для электродов, также являются общеизвестными и могут быть, например, выбраны из группы, состоящей из тонких металлических пленок, таких как золотые, медные, или алюминиевые пленки, или органических проводников, таких как углеродная сажа, углеродные нанотрубки, графен, полианилин (PANI), поли(3,4-этилендиокситиофен) (PEDOT), например, поли(3,4-этилендиокситиофен)-поли(стиролсульфонат) (PEDOT:PSS). Также могут быть использованы металлизированные полиэфирные пленки, такие как металлизированный полиэтилентерефталат (polyethylene terephthalate - PET), например, с использованием алюминиевого покрытия.
Настоящее изобретение может быть использовано во многих применениях EAP и фотоактивных полимеров, в том числе в примерах, где представляет интерес пассивный матричный массив исполнительных устройств.
Во многих применениях главная функция изделия основывается на (локальном) управлении человеческой тканью, или на приведении в движение поверхностей контакта с тканью. В таких применениях исполнительные устройства на основе EAP, например, обеспечивают уникальные преимущества, главным образом, вследствие малого формфактора, гибкости и высокой плотности энергии. Следовательно, EAP и фоточувствительные полимеры могут быть легко интегрированы в мягкие, трехмерные и/или миниатюрные изделия и поверхности контакта. Примерами таких применений являются:
устройства косметической обработки кожи, такие как устройства возбуждения кожи в форме кожных пластырей на основе чувствительных полимеров, которые обеспечивают постоянное или циклическое растяжение кожи для натяжения кожи или для уменьшения морщин;
дыхательные устройства с интерфейсной маской пациента, которая имеет активную подкладку или уплотнение на основе чувствительного полимера, для обеспечения переменного нормального давления на кожу, которое уменьшает или предотвращает красные пятна на лице;
электробритвы с адаптивной бреющей головкой. Высота контактирующих с кожей поверхностей может настраиваться с использованием исполнительных устройств на основе чувствительных полимеров, чтобы влиять на баланс между близостью и раздражением;
устройства очистки полости рта, такие как воздушная нить с динамическим исполнительным устройством с соплом, для улучшения досягаемости распыления, особенно в промежутках между зубами. Альтернативно, зубные щетки могут быть снабжены активируемыми нитями;
устройства потребительской электроники или сенсорные панели, которые обеспечивают локальную тактильную обратную связь посредством массива преобразователей на основе чувствительного полимера, который встроен в пользовательский интерфейс или находится вблизи него;
катетеры с управляемым наконечником для обеспечения возможности легкой навигации в извитых кровеносных сосудах;
измерения физиологических параметров человеческого тела, таких как сердцебиение, SpO2 и кровяное давление.
Другая категория релевантных применений, которая получает преимущество от исполнительных устройств, относится к модификации света. Оптические элементы, такие как линзы, отражающие поверхности, решетки, и т.д., могут быть сделаны адаптивными посредством адаптации формы или положения с использованием этих исполнительных устройств. Здесь одним из преимуществ EAP является, например, низкое энергопотребление.
Другие изменения раскрытых вариантов осуществления могут быть поняты и осуществлены специалистами в данной области техники при применении на практике заявленного изобретения, на основе изучения чертежей, раскрытия, и прилагаемой формулы изобретения. В формуле изобретения, слово «содержащий» не исключает другие элементы или этапы, а форма единственного числа не исключает множественного числа. Тот факт, что некоторые меры перечислены во взаимно отличающихся зависимых пунктах формулы изобретения, не указывает на то, что комбинация этих мер не может быть использована с преимуществом. Никакие ссылочные позиции в формуле изобретения не следует толковать как ограничение ее объема.
| название | год | авторы | номер документа |
|---|---|---|---|
| ИСПОЛНИТЕЛЬНОЕ И СЧИТЫВАЮЩЕЕ УСТРОЙСТВО НА ОСНОВЕ ЭЛЕКТРОАКТИВНОГО ПОЛИМЕРА | 2018 |
|
RU2753750C2 |
| ИСПОЛНИТЕЛЬНОЕ УСТРОЙСТВО НА ОСНОВЕ ЭЛЕКТРОАКТИВНОГО ПОЛИМЕРА | 2017 |
|
RU2745005C2 |
| ИСПОЛНИТЕЛЬНОЕ УСТРОЙСТВО НА ОСНОВЕ ЭЛЕКТРОАКТИВНОГО ПОЛИМЕРА | 2017 |
|
RU2730430C2 |
| ИСПОЛНИТЕЛЬНОЕ УСТРОЙСТВО И СПОСОБ ДЛЯ НЕГО | 2017 |
|
RU2750855C2 |
| ДВУНАПРАВЛЕННЫЙ ИСПОЛНИТЕЛЬНЫЙ МЕХАНИЗМ | 2016 |
|
RU2711243C2 |
| ПРИВОД НА ОСНОВЕ ЭЛЕКТРОАКТИВНОГО МАТЕРИАЛА И СПОСОБ ВОЗБУЖДЕНИЯ | 2018 |
|
RU2766272C2 |
| УПРАВЛЕНИЕ ЖЕСТКОСТЬЮ ДЛЯ ЭЛЕКТРОАКТИВНЫХ ИСПОЛНИТЕЛЬНЫХ УСТРОЙСТВ | 2017 |
|
RU2748051C2 |
| ИСПОЛНИТЕЛЬНОЕ УСТРОЙСТВО НА ОСНОВЕ ЭЛЕКТРОАКТИВНОГО МАТЕРИАЛА | 2018 |
|
RU2762347C2 |
| СЕНСОРНОЕ УСТРОЙСТВО И СПОСОБ СЧИТЫВАНИЯ, ОСНОВАННЫЙ НА ЭЛЕКТРОАКТИВНОМ МАТЕРИАЛЕ | 2017 |
|
RU2720128C2 |
| СЕНСОРНОЕ УСТРОЙСТВО И СПОСОБ ИЗМЕРЕНИЯ ФИЗИОЛОГИЧЕСКОГО ПАРАМЕТРА | 2017 |
|
RU2750352C2 |
Изобретение относится к исполнительным устройствам на основе электроактивных полимеров. Технический результат заключается в обеспечении возможности компенсации смещения отклонения в реальном времени. Исполнительное устройство на основе электроактивного полимера с возбуждением полем снабжено датчиком тока для считывания тока, протекающего к исполнительному устройству. Схема управления используется для возбуждения исполнительного устройства, которое включает в себя источник напряжения. Возбуждением исполнительного устройства управляют в зависимости от считываемого тока, для обеспечения посредством этого заданной подачи заряда для конкретных изменений уровня срабатывания исполнительного устройства. Это обеспечивает объединенную схему возбуждения на основе напряжения и тока для исполнительного устройства на основе возбуждаемого напряжением EAP и это позволяет обеспечить более надежное повторение механических перемещений исполнительного устройства. 2 н. и 11 з.п. ф-лы, 10 ил.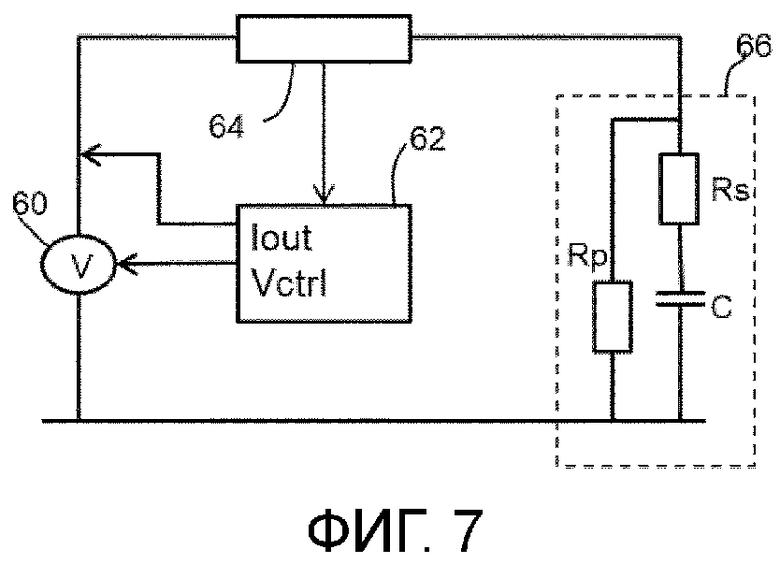
1. Исполнительное устройство для преобразования электрического входного сигнала в механическую мощность, содержащее:
исполнительное устройство (66) на основе электроактивного полимера с возбуждением полем;
датчик (64) тока для считывания тока, протекающего к исполнительному устройству на основе электроактивного полимера; и
схему (66) управления для возбуждения исполнительного устройства на основе электроактивного полимера, причем схема управления содержит управляемый источник (60) напряжения,
причем схема управления выполнена с возможностью управлять возбуждением исполнительного устройства в зависимости от считываемого тока, обеспечивать посредством этого заданную подачу заряда на исполнительное устройство на основе контроля тока для реализации конкретных изменений уровня срабатывания и затем поддерживать уровень срабатывания с использованием регулирования напряжения.
2. Устройство по п. 1, в котором конкретные изменения содержат срабатывание до конкретных уровней срабатывания.
3. Устройство по п. 1 или 2, в котором источник напряжения выполнен с возможностью подавать максимальное напряжение, составляющее по меньшей мере 50 В, или по меньшей мере 100 В, или по меньшей мере 200 В.
4. Устройство по п. 1, в котором заданная подача заряда обеспечивается напряжением срабатывания, которое превышает уровень напряжения во время регулирования напряжения.
5. Устройство по любому предшествующему пункту, в котором заданная подача заряда обеспечивается источником тока схемы управления.
6. Устройство по любому из пп. 1-4, в котором заданная подача заряда обеспечивается посредством настройки уровня напряжения источника напряжения схемы управления.
7. Устройство по любому предшествующему пункту, дополнительно содержащее схему ограничения тока для ограничения зарядного тока, обеспечиваемого для исполнительного устройства.
8. Устройство по любому предшествующему пункту, в котором контроллер дополнительно выполнен с возможностью контролировать значение сопротивления исполнительного устройства и адаптировать заданную подачу заряда в ответ на контролируемое значение сопротивления.
9. Способ возбуждения исполнительного устройства на основе электроактивного полимера с возбуждением полем, содержащий:
этап (90), на котором прикладывают напряжение к исполнительному устройству для изменения состояния срабатывания исполнительного устройства;
этап (92), на котором считывают ток, протекающий к исполнительному устройству; и
этап (94), на котором управляют срабатыванием исполнительного устройства в зависимости от считываемого тока для обеспечения посредством этого заданной подачи заряда для конкретного изменения уровня срабатывания исполнительного устройства и затем поддерживают уровень срабатывания с использованием регулирования напряжения.
10. Способ по п. 9, содержащий этап, на котором прикладывают максимальное напряжение, составляющее по меньшей мере 50 В, или по меньшей мере 100 В, или по меньшей мере 200 В.
11. Способ по п. 9 или 10, содержащий этап, на котором обеспечивают заданную подачу заряда с использованием источника тока или посредством настройки уровня напряжения источника напряжения.
12. Способ по любому из пп. 9-11, дополнительно содержащий этап, на котором ограничивают зарядный ток, обеспечиваемый для исполнительного устройства.
13. Способ по любому из пп. 9-12, содержащий этап, на котором контролируют значение сопротивления исполнительного устройства и адаптируют заданную подачу тока в ответ на контролируемое значение сопротивления.
| US 20110133676 A1, 09.06.2011 | |||
| ЭЛЕКТРОАКТИВНЫЙ ПОЛИМЕРНЫЙ АКТЮАТОР | 2011 |
|
RU2568944C2 |
| ЭЛЕКТРОАКТИВНЫЙ ПОЛИМЕРНЫЙ ИСПОЛНИТЕЛЬНЫЙ МЕХАНИЗМ | 2011 |
|
RU2589245C2 |
| US 7315109 B1, 01.01.2008 | |||
| US 20140306624 A1, 16.10.2014 | |||
| US 9170650 B2, 27.10.2015. | |||

