Изобретение относится к области авиации, в частности к устройствам захвата беспилотных летательных аппаратов.
Известно устройство для борьбы с дистанционно пилотируемыми (беспилотными) летательными аппаратами (далее - ДПЛА) [Патент RU №72754 U1. - МПК: F41H 13/00, опубл. 27.04.2008 г.], содержащее блок доставки, блок пеленгации, блок наведения, контейнер с сетью-ловушкой, к краям которой крепятся грузы, где сеть-ловушка с грузилами, размещенная в контейнере, доставляется в район нахождения ДПЛА с помощью блока доставки (ракеты), наводится на ДПЛА с помощью блока наведения по данным блока пеленгации, полученными звукотепловым способом, после чего сеть-ловушка синхронно отстреливается с помощью четырех патронов в сторону цели, при этом грузила, представляющие круглые с отверстиями для крепления киперных лент, растягивают данную сеть-ловушку, обеспечивая накрытие и захват ДПЛА.
Недостатком данного устройства является низкая вероятность захвата истинных целей, поскольку отсутствует возможность проводить разграничение целей при их групповой атаке по заданным критериям на истинные и ложные с последующей расстановкой приоритетности захвата с учетом высоты, скорости и траектории полета.
Известно устройство захвата беспилотных летательных аппаратов [Патент RU №2660999 С1. - МПК: В64С 39/02, B64D 5/00, B64D 1/00, опубл. 11.07.2018 г. Бюл. №20], содержащее БЛА, бортовой процессор, сети с грузилами, камеры кругового обзора, устройство отстрела, выполненное в виде пушки, в которой размещены минимум две капсулы с сетью, грузилами и парашютом, также на корпусе БЛА установлен механизм перемещения, отвечающий за перемещение пушки по траектории поперечного сечения поверхности фюзеляжа, а на механизме перемещения установлен механизм вращения, управляющий движением пушки в горизонтальной и вертикальной плоскостях вокруг оси, а также на БЛА размещены датчики, работающие в акустическом диапазоне, и датчики, работающие в трех и более настраиваемых радиолокационных диапазонах электромагнитных волн, а также в грузила сети вмонтированы датчики определения координат.
Недостатком данного устройства является низкая вероятность захвата истинных целей, ввиду отсутствия возможности проводить разграничение целей при их групповой атаке по заданным критериям на истинные и ложные с последующей расстановкой приоритетности захвата.
Техническим результатом предлагаемого способа захвата беспилотных летательных аппаратов является повышение вероятности захвата истинных целей (БЛА противника), основанной на селекции движущихся целей с последующей расстановкой приоритетности их захвата по заданным критериям.
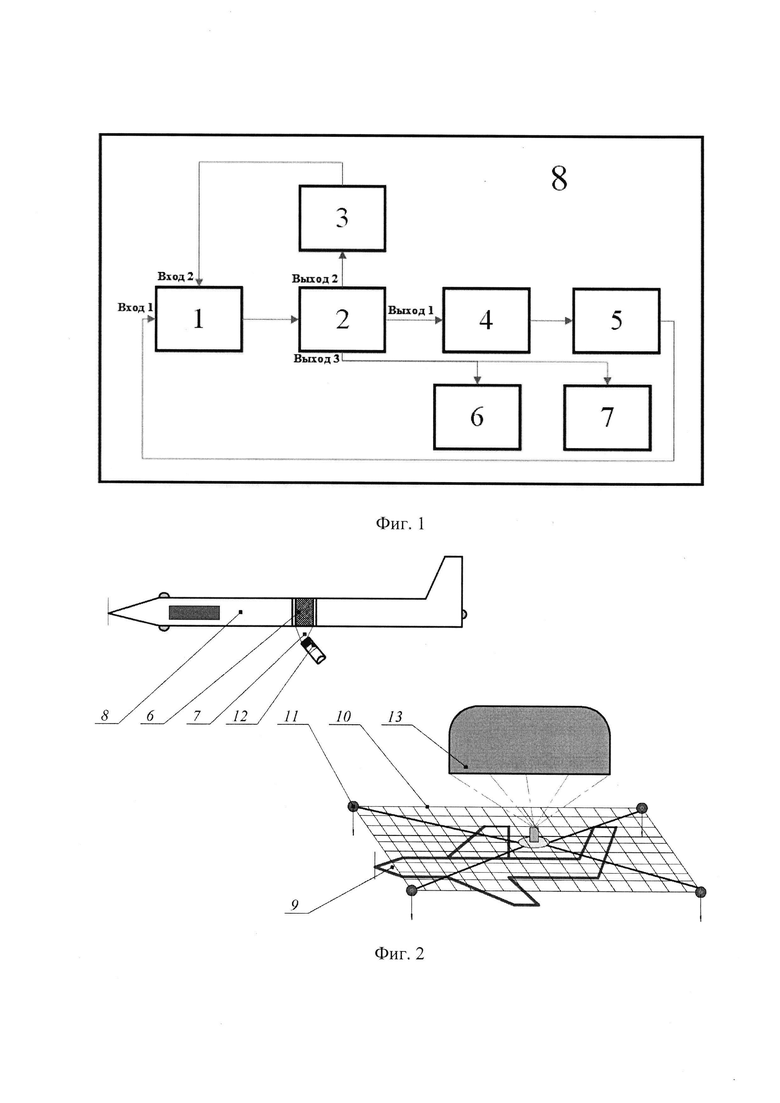
Указанный технический результат достигается тем, что изобретение включает в себя БЛА, на котором установлен бортовой вычислительный комплекс, оптико-электронные камеры кругового обзора и механизм наведения, на котором установлено устройство отстрела с капсулами, содержащими парашют и сеть с грузилами, при этом на БЛА дополнительно установлен блок управления последовательно соединенный с бортовым вычислительным комплексом и установленными блоком селекции и блоком приоритетности, выход которого соединен с первым входом бортового вычислительного комплекса, также второй выход блока управления связан с оптико-электронными камерами кругового обзора, выход которых соединен со вторым входом бортового вычислительного комплекса, при этом третий выход блока управления соединен с объединенным входом механизма наведения и устройства отстрела.
Сущность данного изобретения заключается в том, что на БЛА дополнительно установлен блок управления последовательно соединенный с бортовым вычислительным комплексом и установленными блоком селекции и блоком приоритетности, выход которого соединен с первым входом бортового вычислительного комплекса, также второй выход блока управления связан с оптико-электронными камерами кругового обзора, выход которых соединен со вторым входом бортового вычислительного комплекса, при этом третий выход блока управления соединен с объединенным входом механизма наведения и устройства отстрела.
Повышение вероятности захвата истинных целей БЛА противника обеспечивается следующим образом.
В момент обнаружения БЛА противника с помощью оптико-электронных камер кругового обзора определяется количество БЛА противника и их пространственные координаты. Далее полученные данные (пространственные координаты БЛА противника и их количество) передаются на бортовой вычислительный комплекс, который производит расчет высоты и корректировку данных, в частности пространственных координат, например, с помощью алгоритма [Абрамовская М.В. Разработка алгоритма определения координат объекта при заданном направлении линии визирования // Вестник новгородского государственного университета. №4(95). 2016. С.7-9], их скорости и траектории полета, например, с помощью алгоритма [Яковлев К.С., Макаров Д.А., Баскин Е.С. Метод автоматического планирования траектории беспилотного летательного аппарата в условиях ограничений на динамику полета // «Моделирование и управление». Искусственный интеллект и принятие решений. №4. 2014. С.3-17].
Затем бортовой вычислительный комплекс передает сигнал на блок управления, который выдает команду на работу блока селекции. После поступившей команды блок селекции проводит анализ движущихся БЛА противника с целью определения истинных и ложных целей по заданному алгоритму. Селективный анализ может производиться, например, за счет использования нормированных отсчетов спектральной плотности мощности отраженных сигналов на различных поляризациях [Борзов А.Б., Лиходеенко К.П., Муратов И.В., Павлов Г.Л., Сучков В.Б. Анализ селективных признаков наземных радиолокационных целей].
Затем сгенерированные данные от блока селекции передаются на блок приоритетности захвата. Блок приоритетности захвата определяет наиболее рациональную и приоритетную цель для захвата по заданным критериям оценки, учитывая приведенные данные с блока селекции. После произведения критериальной оценки блок приоритетности захвата передает сгенерированные данные о приоритетной цели захвата на бортовой вычислительный комплекс, который в свою очередь выдает команду на захват.
Тем самым достигается указанный в изобретении технический результат.
На фигуре 1 изображена блок-схема, которая отображает алгоритм работы устройства захвата БЛА. На фигуре 2 изображен эскиз момента захвата БЛА противника.
На фиг. 1 и 2 обозначены: 1 - бортовой вычислительный комплекс, 2 - блок управления, 3 - оптико-электронные камеры кругового обзора, 4 - блок селекции, 5 - блок приоритетности захвата, 6 - механизм наведения, 7 - устройство отстрела, 8 - БЛА; 9 - БЛА противника, 10 - сеть, 11- грузила, 12 - капсула, 13 - парашют.
Назначение блока управления 2 заключается в обеспечении управления такими элементами устройства, как оптико-электронные камеры кругового обзора 3, блок селекции 4 и механизмом наведения 6 с устройством отстрела 7. Блок управления 2 может быть выполнен, как полетный контроллер на базе Arduino.
Назначение блока селекции 4 заключается в анализе БЛА противника 9 с целью определения истинных и ложных целей по заданному алгоритму. Блок селекции 4 может быть выполнен, как устройство селекции сигналов движущихся целей.
Блок приоритетности захвата 5 предназначен для определения наиболее приоритетной цели для захвата БЛА противника 9. К примеру, возможно производить критериальную оценку по габаритным параметрам БЛА противника 9. Блок приоритетности 5 может быть выполнен как микропроцессор с заданным алгоритмом расчета [Золотухин С.И., Дьяков Д.Е., Зибров Р.С., Котляров П.С. Точность расчетов при применении способа выбора рационального решения // Журнал «Современные наукоемкие технологии». 2019. №10. Часть 2. С.252-256].
Устройство захвата беспилотных летательных аппаратов работает следующим образом.
При попадании БЛА противника 9 в зону действия оптико-электронных камер кругового обзора 3, подается сигнал об обнаружении БЛА противника 9 на бортовой вычислительный комплекс 1. Затем бортовой вычислительный комплекс 1 передает сигнал на блок управления 2, который в свою очередь выдает команду на оптико-электронные камеры кругового обзора 3 на определение количества БЛА противника 9 и их пространственные координаты. Далее полученные данные с оптико-электронных камер кругового обзора 3 (пространственные координаты БЛА противника и их количество) передаются на бортовой вычислительный комплекс 1, который производит расчет высоты с корректировкой данных по пространственным координатам, скорости и траектории полета БЛА противника 9.
Затем бортовой вычислительный комплекс 1 передает сигнал на блок управления 2, который задает команду на работу блока селекции 4. После поступившей команды блок селекции 4 производит разграничение БЛА противника 9 при их групповой атаке по заданному алгоритму на истинные и ложные цели. Далее сгенерированные данные от блока селекции 4 передаются на блок приоритетности захвата 5. Блок приоритетности захвата 5 определяет наиболее рациональную и приоритетную цель для захвата по заданным критериям оценки, учитывая информацию, поступившую с блока селекции 4. После произведения критериальной оценки блок приоритетности захвата 5 передает сгенерированные данные о приоритетной цели захвата на бортовой вычислительный комплекс 1.
Бортовой вычислительный комплекс 1, основываясь на полученных данных от блока приоритетности захвата 5, выдает команду не блок управления 2 о произведении захвата БЛА противника 9. Далее блок управления 2 выдает сигнал о работе на механизм наведения 6, который выставляет устройство отстрела 7 под нужным углом в необходимом направлении для осуществления захвата. После этого блок управления 2 выдает команду на устройство отстрела 7 на осуществление выстрела капсулой 12 по БЛА противника 9. В момент прохождения заданного пути до БЛА противника 9 капсула 12 раскрывается и из нее вылетает сеть 10 с грузилами 11 и парашют 13, посредством которых осуществляется захват БЛА противника 9 и последующее его приземление.
Затем производится повторный анализ воздушной обстановки с учетом того был ли промах или нет. После чего принимается решение на осуществление захвата цели. В случае промаха последовательность действий для осуществления захвата аналогична.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ЗАХВАТА БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2020 |
|
RU2755556C1 |
| УСТРОЙСТВО ЗАХВАТА БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2017 |
|
RU2660998C1 |
| СПОСОБ ПОРАЖЕНИЯ ВОЗДУШНОЙ ЦЕЛИ НАД ОБЪЕКТОМ | 2024 |
|
RU2838712C1 |
| СПОСОБ ЗАХВАТА БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2017 |
|
RU2661021C1 |
| СПОСОБ ЗАХВАТА МАЛОГАБАРИТНЫХ БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2014 |
|
RU2565863C2 |
| СПОСОБ ЗАХВАТА ВОЗДУШНОЙ ЦЕЛИ СЕТЬЮ | 2020 |
|
RU2745590C1 |
| СТАЦИОНАРНЫЙ КОМПЛЕКС ОБНАРУЖЕНИЯ И ПОРАЖЕНИЯ МАЛОГАБАРИТНЫХ БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2019 |
|
RU2734267C1 |
| УСТРОЙСТВО - ИСТРЕБИТЕЛЬ ДЛЯ УНИЧТОЖЕНИЯ ДИСТАНЦИОННО ПИЛОТИРУЕМЫХ (БЕСПИЛОТНЫХ) ЛЕТАТЕЛЬНЫХ АППАРАТОВ (ДПЛА) | 2012 |
|
RU2490584C1 |
| Устройство перехвата беспилотных летательных аппаратов | 2020 |
|
RU2738383C2 |
| КОМПЛЕКС БОРЬБЫ С БЕСПИЛОТНЫМИ ЛЕТАТЕЛЬНЫМИ АППАРАТАМИ | 2018 |
|
RU2700107C1 |
Устройство захвата беспилотных летательных аппаратов (БЛА) содержит бортовой вычислительный комплекс, блок управления, оптико-электронные камеры кругового обзора, блок селекции, блок приоритетности захвата, механизм наведения, устройство отстрела, сеть, грузила, капсулу, парашют, размещенные в беспилотном летательном аппарате. Обеспечивается повышение вероятности захвата истинных целей (БЛА противника), основанной на селекции движущихся целей с последующей расстановкой приоритетности их захвата по заданным критериям. 2 ил.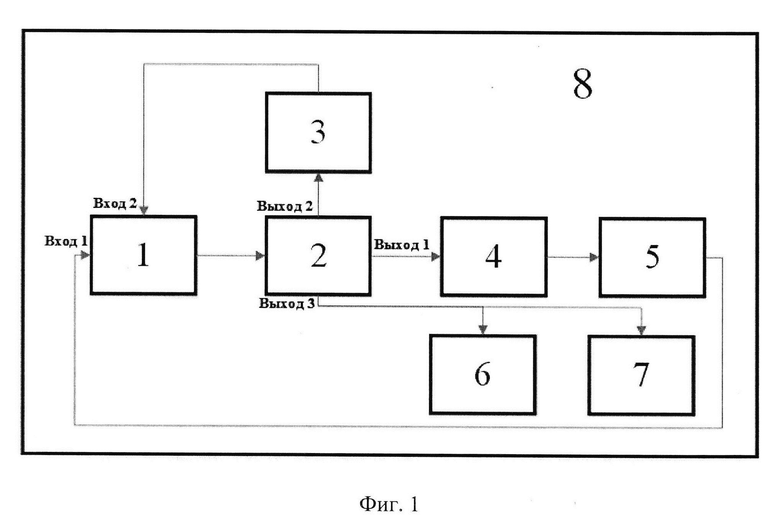
Устройство захвата беспилотных летательных аппаратов, включающее беспилотный летательный аппарат (БЛА), на котором установлен бортовой вычислительный комплекс, оптико-электронные камеры кругового обзора и механизм наведения, на котором установлено устройство отстрела с капсулами, содержащими парашют и сеть с грузилами, отличающееся тем, что на БЛА дополнительно установлен блок управления, последовательно соединенный с бортовым вычислительным комплексом и установленными блоком селекции и блоком приоритетности, выход которого соединен с первым входом бортового вычислительного комплекса, также второй выход блока управления связан с оптико-электронными камерами кругового обзора, выход которых соединен со вторым входом бортового вычислительного комплекса, при этом третий выход блока управления соединен с объединенным входом механизма наведения и устройства отстрела.
| УСТРОЙСТВО ДЛЯ УНИЧТОЖЕНИЯ РАСТИТЕЛЬНОСТИ НА ЖЕЛЕЗНОДОРОЖНЫХ ПУТЯХ | 0 |
|
SU185949A1 |
| СПОСОБ ЗАХВАТА БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2017 |
|
RU2661021C1 |
| CN 205707371 U, 23.11.2016 | |||
| KR 101857135 B1, 11.05.2018 | |||
| WO 2018112275 A1, 21.06.2018. | |||

