Изобретение относится к области противодействия радиоэлектронным средствам (РЭС) и может быть использовано для помехового воздействия на РЭС различного назначения.
Известен способ доставки постановщика радиопомех (см., например, [1]), основанный на предварительной доставке в район местонахождения РЭС неуправляемым носителем передатчика оптического излучения (ПОИ) и навигационного приемника, выполненных в едином кассетном исполнении, которые после фиксации в грунте автоматически приводятся в рабочее состояние, передаче навигационным приемником через спутниковую навигационную систему на пункт запуска носителей (ПЗН) координат местоположения ПОИ, определении по известным значениям координат точки доставки передатчика радиопомех (ПРП) и местоположения ПОИ значений угловых отклонений полета самонаводящегося носителя (СНН) ПРП от направления на ПОИ, внесении значений угловых отклонений в систему самонаведения на оптическое излучение СНН ПРП, пуске СНН ПРП и доставке его в зону воздействия на РЭС. Недостатком способа является недостаточная точность доставки ПРП в район размещения РЭС, обусловленная возможными ошибками при наведении СНН, связанными со степенью неопределенности в оценке на ПЗН координат СНН ПРП в полете, при которых происходит захват СНН излучения ПОИ.
Наиболее близким по технической сущности и достигаемому результату (прототипом) является способ доставки ПРП (см., например, [2]), основанный на доставке в район местонахождения РЭС неуправляемым носителем ПОИ, оптико-электронного пеленгатора (ОЭП) и навигационного приемника, выполненных в едином кассетном исполнении, которые после фиксации в грунте автоматически приводятся в рабочее состояние, определении координат местоположения ПОИ, пуске СНН ПРП, излучении ПОИ локационного сигнала и определении по отраженному сигналу текущих пространственных координат местоположения СНН, передаче их значений и значений координат местоположения ПОИ на СНН, определении на СНН значений текущих угловых отклонений от направления на ПОИ, корректировке по их значениям траектории полета СНН в расчетную точку и доставке ПРП. Недостатком способа является возможность срыва наведения СНН ПРП по сигналу ПОИ, обусловленная большим объемом информации передаваемой и обрабатываемой на борту СНН. Этот объем включает: значения координат местоположения ПОИ и текущих пространственных координат местоположения СНН, что при передаче сигнального кода требует устойчивого канала обмена данных между СНН и ПОИ.
Техническим результатом, на достижение которого направлено предлагаемое изобретение, является повышение эффективности доставки ПРП в район местонахождения РЭС.
Технический результат достигается тем, что в известном способе забрасываемого ПРП, основанном на доставке в район местонахождения РЭС неуправляемым носителем ПОИ, ОЭП и навигационного приемника, выполненных в едином кассетном исполнении, которые после фиксации в грунте автоматически приводятся в рабочее состояние, определении координат местоположения ПОИ, излучении ПОИ локационного сигнала, пуске СНН ПРП, приеме и измерении параметров отраженного оптического сигнала от СНН ПРП, определении по их значениям текущих пространственных координат местоположения СНН ПРП, дополнительно включают блок вычисления в состав доставляемой кассеты с ПОИ, ОЭП и навигационным приемником, в котором по значениям координат местоположения ПОИ, текущих пространственных координат местоположения СНН ПРП и координат точки доставки ПРП вычисляют текущие угловые отклонения от направления на ПОИ СНН ПРП, значения которых передают ПОИ на СНН ПРП, по значениям текущих угловых отклонений корректируют траекторию полета СНН ПРП в расчетную точку и доставляют ПРП.
Сущность изобретения заключается в использовании устанавливаемого в районе РЭС оптико-электронного локационного устройства (ОЭЛУ), формирующего управляющие сигналы по угловым отклонениям СНН для доставки ПРП в расчетную точку.
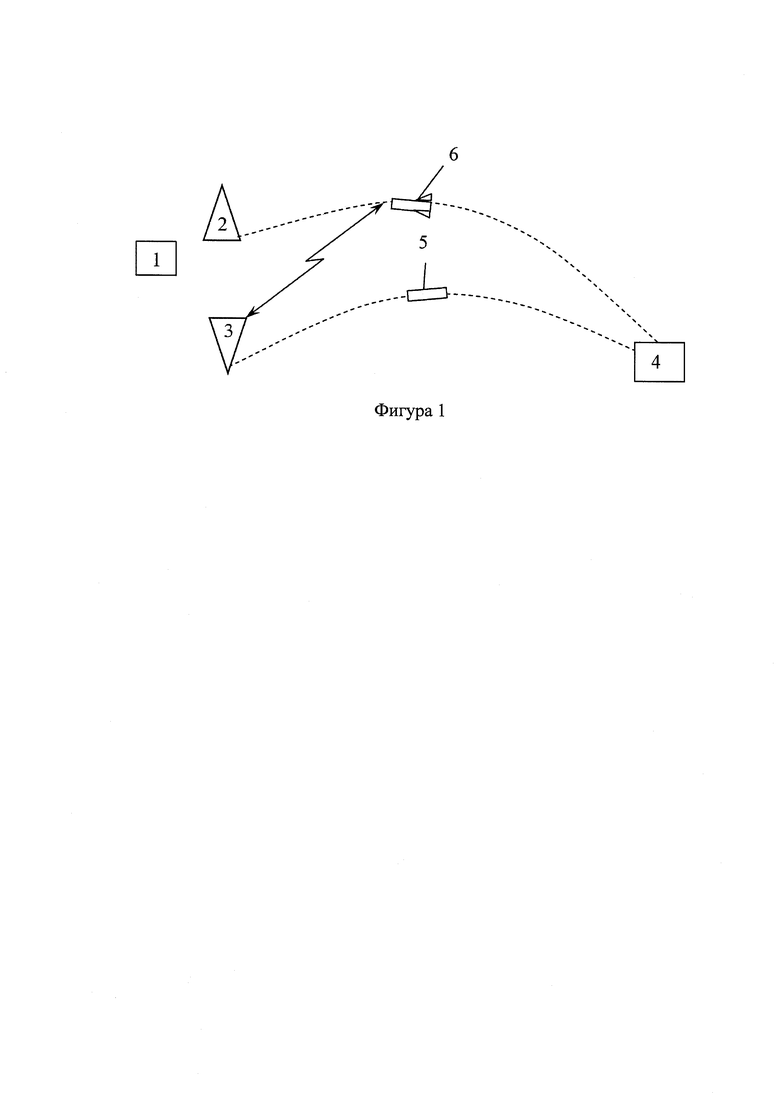
В целом задача доставки ПРП в предлагаемом способе решается следующим образом (фигура 1). Предварительно на ПЗН 4 производится выбор координат точки доставки ПРП 2 в зависимости от рельефа местности, характеристик ПРП, требований скрытности и других условий, необходимых дня создания эффективных помех РЭС 1. С ПЗН 4 осуществляют пуск неуправляемого носителя 5, который доставляет в район нахождения РЭС 1 кассету 3, включающую навигационный приемник, ОЭЛУ, сопряженных с вычислителем, которые автоматически приводятся в рабочее состояние после фиксации в грунте. ОЭЛУ включает в себя ПОИ и ОЭП. При этом в вычислитель внесены координаты доставки ПРП 2. ОЭЛУ 3 осуществляет излучение оптического локационного сигнала, в направлении ожидаемого полета СНН ПРП 6. Навигационный приемник определяет свои координаты. С ПЗН 4 осуществляют пуск СНН ПРП 6, который при подлете к ОЭЛУ 3 принимает его излучение. При этом ОЭЛУ 3 принимает отраженное от оптико-электронной системы СНН 6 излучение и определяет текущие пространственные координаты местоположения СНН 6. По значениям пространственных координат местоположения СНН 6, координат точки доставки ПРП 2 и координат своего местоположения ОЭЛУ 3 вычисляет угловые отклонения полета СНН 6 от направления на ОЭЛУ 3 в направление расчетной точки доставки ПРП 2 и передает их значения на СНН 6. СНН 6 по поступившим данным осуществляет корректировку своего полета. Процесс корректировки полетом в направление расчетной точки доставки ПРП 2 осуществляется постоянно до момента ухода из поля зрения оптико-электронной системы СНН 6 ОЭЛУ 3. При этом достигается существенное сокращение объема передаваемой информации на борт СНН 6 в виде двух параметров углов корректировки полета по курсу и тангажу для текущего момента времени.
Снижение объема передачи данных по оптическому каналу приводит к уменьшению вероятности ошибки приема и обработки кодовых сигналов, а также снижению энергетических затрат для передачи информации (см., например, [3], стр. 264-389). Для реализации передачи координатной информации в прототипе необходимо, например, сформировать кодовую последовательность по двум координатам местоположения элементов доставки ПРП: ПОИ (xПОИ, yПОИ, zПОИ) и CHH (xCHH, yCHH, zCHH), что составляет достаточно «длинные» одно или несколько кодовые слова. Для предлагаемого способа объем данных существенно меньше: значения по изменению углов курса Δβ и тангажа Δε. Это приводит к уменьшению длины кодовой последовательности для предлагаемого способа и повышению надежности передачи информации на СНН ПРП (и в целом росту эффективности доставки ПРП).
На фигуре 2 представлена блок-схема устройства, с помощью которого может быть реализован предлагаемый способ. Блок-схема устройства содержит, выполненные в едином кассетном исполнении: навигационный приемник 7, ПОИ 8, вычислитель 9 и ОЭП 10. Остальные обозначения соответствуют фигуре 1.
Устройство работает следующим образом. В вычислитель 9 вносятся координаты точки доставки ПРП. После фиксации в грунте навигационный приемник 7 через спутниковую навигационную систему определяет свои координаты, значения которых передает вычислитель 9. ПОИ 8 формирует и излучает локационный сигнал, который при подлете СНН 6 на энергически доступное расстояние отражается от его оптико-электронной системы. Отраженный сигнал принимается ОЭП 10, который осуществляет угломерно-дальномерную оценку его параметров (например, угломерную оценку по положению изображения отраженного сигнала на поверхности координатора, дальномерную оценку по времени задержки между излученным и принятым сигналами). Данные о дальности и угловых координатах СНН 6 передаются вычислитель 9, который вычисляет угловые отклонения траектории полета СНН 6 в текущий момент времени и формирует управляющие сигналы ПОИ 9. ПОИ 9 в дополнение к локационному сигналу формирует структуру информационного сигнала (кодовый пакет). Информационный сигнал содержит информацию об угловых отклонениях траектории полета СНН 6 для доставки ПРП в расчетную точку, значения которых преобразуются в сигналы управления автопилотом СНН 6.
Таким образом, предлагаемый способ позволяет повысить эффективность доставки ПРП за счет использования устанавливаемого в районе РЭС ОЭЛУ формирующего управляющие сигналы по угловым отклонениям СНН для доставки ПРП в расчетную точку.
Предлагаемое техническое решение является новым, поскольку из общедоступных сведений неизвестен способ доставки забрасываемого ПРП, основанного на доставке в район местонахождения РЭС неуправляемым носителем ПОИ, ОЭП и навигационного приемника, выполненных в едином кассетном исполнении, которые после фиксации в грунте автоматически приводятся в рабочее состояние, определении координат местоположения ПОИ, излучении ПОИ локационного сигнала, пуске СНН ПРП, приеме и измерении параметров отраженного оптического сигнала от СНН ПРП, определении по их значениям текущих пространственных координат местоположения СНН ПРП, дополнительном включении блока вычисления в состав доставляемой кассеты с ПОИ, ОЭП и навигационным приемником, вычислении в котором по значениям координат местоположения ПОИ текущих пространственных координат местоположения СНН ПРП и координат точки доставки ПРП, текущих угловых отклонений от направления на ПОИ СНН ПРП, передаче значений которых ПОИ на СНН ПРП, корректировке по значениям текущих угловых отклонений траектории полета СНН ПРП в расчетную точку и доставке ПРП.
Предлагаемое техническое решение практически применимо, так как для его реализации могут быть использованы типовые оптико-электронные и электротехнические узлы и устройства.
1 Заявка на изобретение 2017113290 от 17.04.2017. МПК G01S 7/38. Способ доставки передатчика радиопомех / Ю.Л. Козирацкий, П.Е. Кулешов, М.Л. Паринов, Д.А. Нагалин и др.; заявитель ВУНЦ ВВС «ВВА», бюл. №29 от 17.10. 2017 г.
2 Патент №2361233 RU. МПК G01S 7/38. Способ доставки постановщика радиопомех / Ю.Л. Козирацкий, А.Ю. Козирацкий, П.Е. Кулешов, Д.А. Сербов, Д.В. Мещеряков, А.А. Донцов; заявитель и патентообладатель ВУНЦ ВВС «ВВА им. проф. Н.Е. Жуковского и Ю.А. Гагарина». - №2008105102/09; заявл. 11.02.2008 г., Бюл. №19 от 10.07.2009 г.
3 P.M. Гильярди, Ш. Карп. Оптическая связь. - М.: «Связь», 1978, 424 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ДОСТАВКИ ИСТОЧНИКА РАДИОПОМЕХ | 2015 |
|
RU2591047C1 |
| СПОСОБ ДОСТАВКИ ПОСТАНОВЩИКА РАДИОПОМЕХ | 2008 |
|
RU2361233C1 |
| Способ доставки передатчиков радиопомех приемным устройствам наземных радиоэлектронных средств спутниковых систем радиосвязи и радионавигации | 2024 |
|
RU2825033C1 |
| Способ доставки постановщиков помех и беспилотный робототехнический комплекс радиоэлектронной борьбы | 2016 |
|
RU2625206C1 |
| СПОСОБ ПОРАЖЕНИЯ НАЗЕМНЫХ СТАНЦИЙ АКТИВНЫХ ПОМЕХ БОРТОВЫМ РАДИОЛОКАЦИОННЫМ СТАНЦИЯМ САМОЛЕТОВ САМОНАВОДЯЩИМСЯ ПО РАДИОИЗЛУЧЕНИЮ ОРУЖИЕМ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2506522C2 |
| Способ наземной и воздушной доставки постановщиков радиопомех с использованием мобильного робототехнического комплекса радиоэлектронной борьбы | 2016 |
|
RU2652914C1 |
| СПОСОБ ПОРАЖЕНИЯ ЦЕЛИ АРТИЛЛЕРИЙСКИМИ САМОНАВОДЯЩИМИСЯ БОЕПРИПАСАМИ | 2020 |
|
RU2738330C1 |
| Пилотажно-навигационная система транспортного летательного аппарата | 2024 |
|
RU2822088C1 |
| СПОСОБ РАДИОПРОТИВОДЕЙСТВИЯ ЗЕНИТНО-РАКЕТНЫМ КОМПЛЕКСАМ | 2020 |
|
RU2755567C1 |
| КОРРЕЛЯЦИОННО-БАЗОВАЯ СИСТЕМА ЛОКАЦИИ НЕПОДВИЖНЫХ ИСТОЧНИКОВ РАДИОИЗЛУЧЕНИЯ С ИСПОЛЬЗОВАНИЕМ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2018 |
|
RU2674265C1 |

Изобретение относится к области радиотехники и может быть использовано для противодействия радиоэлектронным средствам (РЭС). Технический результат состоит в обеспечении помехового воздействия на РЭС различного назначения, для этого доставляют в район местонахождения РЭС неуправляемым носителем передатчик оптического излучения (ПОИ), оптико-электронный пеленгатор (ОЭП) и навигационный приемник, выполненные в едином кассетном исполнении, которые после фиксации в грунте автоматически приводятся в рабочее состояние, определении координат местоположения ПОИ, излучении ПОИ локационного сигнала, пуске самонаводящегося носителя (СНН) ПРП, приеме и измерении параметров отраженного оптического сигнала от СНН ПРП, определении по их значениям текущих пространственных координат местоположения СНН ПРП, дополнительном включении блока вычисления в состав доставляемой кассеты с ПОИ, ОЭП и навигационным приемником, вычислении в котором по значениям координат местоположения ПОИ текущих пространственных координат местоположения СНН ПРП и координат точки доставки ПРП, текущих угловых отклонений от направления на ПОИ СНН ПРП, передаче значений которых ПОИ на СНН ПРП, корректировке по значениям текущих угловых отклонений траектории полета СНН ПРП в расчетную точку и доставке ПРП. 2 ил.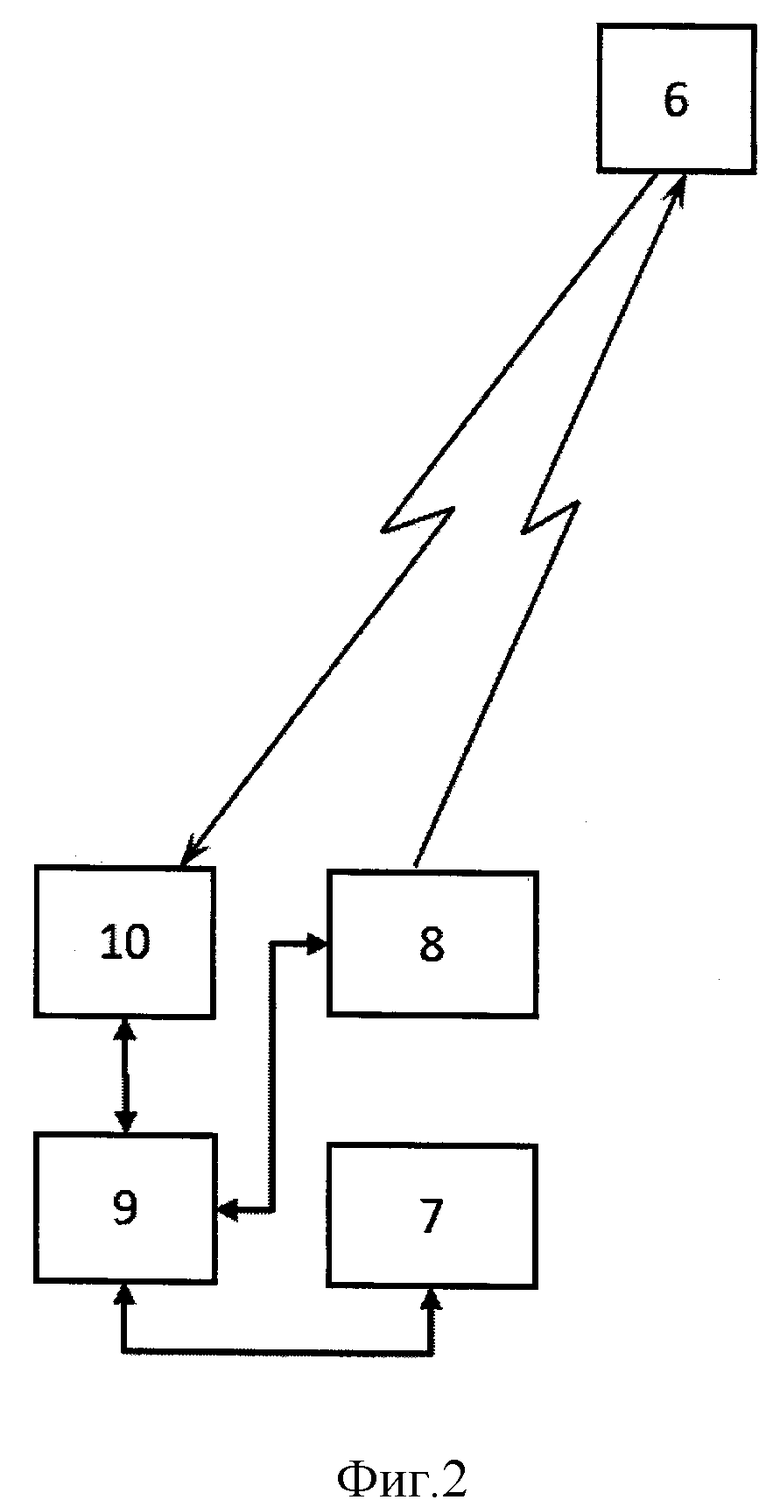
Способ доставки забрасываемого передатчика радиопомех, основанный на предварительном выборе на пункте запуска носителей координат точки доставки передатчика радиопомех, посредством неуправляемого носителя доставке в район местонахождения радиоэлектронного средства кассеты, включающей передатчик оптического излучения, оптико-электронный пеленгатор и навигационный приемник, выполненные в едином кассетном исполнении, которые после фиксации в грунте автоматически приводятся в рабочее состояние, через спутниковую навигационную систему определяют координаты местоположения передатчика оптического излучения, излучают передатчиком оптического излучения локационный сигнал, по которому запускают самонаводящийся носитель с передатчиком радиопомех, принимают и измеряют параметры отраженного оптического сигнала от самонаводящегося носителя, определяют по их значениям текущие пространственные координаты местоположения самонаводящегося носителя с передатчиком радиопомех, отличающийся тем, что в состав доставляемой кассеты дополнительно включают блок вычисления, сопряженный с передатчиком оптического излучения, оптико-электронным пеленгатором и навигационным приемником, в блоке вычисления, по значениям координат местоположения передатчика оптического излучения, текущих пространственных координат местоположения самонаводящегося носителя передатчика радиопомех и ранее выбранных координат точки доставки передатчика радиопомех, вычисляют текущие угловые отклонения от направления на передатчик оптического излучения самонаводящегося носителя передатчика помех, значения которых передают передатчиком оптического излучения на самонаводящийся носитель с передатчиком радиопомех, по значениям текущих угловых отклонений корректируют траекторию полета самонаводящегося носителя в расчетную точку, в которую доставляют передатчик радиопомех.
| СПОСОБ ДОСТАВКИ ПОСТАНОВЩИКА РАДИОПОМЕХ | 2008 |
|
RU2361233C1 |
| СРЕДСТВО ПОСТАНОВКИ РАДИОПОМЕХ | 1997 |
|
RU2131107C1 |
| СПОСОБ ПОСТАНОВКИ ПОМЕХ РАДИОЛОКАЦИОННЫМ СТАНЦИЯМ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2000 |
|
RU2204147C2 |
| US 5136295 A, 04.08.1992 | |||
| US 6133865 A, 17.19.2000 | |||
| Пресс для выдавливания из деревянных дисков заготовок для ниточных катушек | 1923 |
|
SU2007A1 |

