Способ наземной и воздушной доставки постановщиков радиопомех с использованием мобильного робототехнического комплекса радиоэлектронной борьбы
Заявляемые объекты объединены одним изобретательским замыслом, относятся к робототехническим комплексам радиоэлектронной борьбы (РЭБ), предназначенным для дистанционной работы в труднодоступных и опасных для присутствия человека местах.
Известен способ, реализованный комплектом малогабаритных заносимых передатчиков помех РП-377А. Содержит набор литеров передатчиков помех, пульт дистанционного управления, блоки питания. В заданный район оборудования доставляется группой специального назначения. Основным недостатком способа является подверженность риску людей, низкая мобильность, ограниченное время работы.
Известен способ доставки постановщика радиопомех (см. Пат. РФ №2361233, МПК G01S 7/38, опубл. 10.07.2009 г.), основанный на предварительной доставке в район местоположения радиоэлектронного средства неуправляемым носителем источника инфракрасного излучения и навигационного приемника, определяют по сигналу навигационного приемника координаты местоположения источника инфракрасного излучения, по известным значениям координат точки доставки постановщика помех и местоположения источника инфракрасного излучения определяют значения угловых отклонений полета самонаводящегося носителя постановщика радиопомех от направления на источник инфракрасного излучения, вносят значения угловых отклонений в систему самонаведения на инфракрасное излучение носителя постановщика помех, осуществляют пуск самонаводящегося носителя постановщика радиопомех и доставляют его в расчетную точку.
Недостатки способа-аналога состоят в следующем. Низкая точность доставки постановщика помех объясняется отсутствием корреляции углового отклонения полета самонаводящегося носителя (снаряда) и распространением радиоволн. Некоторое увеличение точности доставки постановщика помех достигается за счет существенного усложнения системы в целом. В рамках управляемого снаряда достигается незначительная мощность передатчика помех и ограниченное время его работы. Последнее резко снижает эффективность применения способа-аналога особенно в условиях низкой точности доставки средств РЭБ. Кроме того, существенную трудность представляет техническая реализация рассматриваемых средств доставки из-за существенной перегрузки оборудования в моменты выстрела и контакта с землей.
Наиболее близким по технической сущности является способ доставки постановщика радиопомех на беспилотном летательном аппарате (см. Пат. РФ №2353891, МПК F41H 13/00, опубл. 27.04.2009 г. «Беспилотный робото-технический комплекс дистанционного мониторинга и блокирования потенциально опасных объектов воздушными роботами, оснащенными интегрированной системой поддержки принятия решения по обеспечению требуемой эффективности их применения»). Способ-прототип заключается в том, что доставку постановщика радиопомех осуществляют с помощью БПЛА, управляемого с поста дистанционного управления по беспроводному каналу.
Существенная часть задач по ведению РЭБ в вооруженных силах развитых государств возлагается на системы и средства воздушного базирования, при этом БПЛА обладают рядом преимуществ перед пилотируемыми средствами, в первую очередь - это отсутствие риска для жизни человека. Кроме того, при использовании БПЛА проще использовать технологии обеспечения малой заметности, что позволяет приблизится к цели на более близкое расстояние. Последнее обстоятельство, в свою очередь, снижает энергетические затраты на постановку радиопомех. Одновременно обеспечивается электромагнитная совместимость с радиосредствами своих войск. В настоящее время размещение на БПЛА систем и средств РЭБ получают наибольшее распространение на тактическом уровне, где они могут применяться с максимальной эффективностью (см. В. Евграфов. Перспективы использования зарубежными вооруженными силами беспилотных летательных аппаратов для решения задач РЭБ. Интернет-ресурс http://pentagonus.ru/publ/perspektivy-ispolzovanija-zarubezhnymi-…). Наиболее перспективными для оснащения средствами РЭБ считаются малые и средние БПЛА.
Однако, способу-прототипу присущ недостаток. Постановщики радиопомех обладают ограниченным энергетическим и временным ресурсом.
Задачей заявляемого способа доставки постановщиков радиопомех является снятие ограничений на энергетические, массогабаритные и временные ресурсы постановщика радиопомех благодаря комплексированию средств доставки и оптимизации процессов управления ими.
Поставленная задача достигается тем, что в известном способе наземной и воздушной доставки постановщиков радиопомех, использующем мобильный робототехнический комплекс радиоэлектронной борьбы на беспилотном летательном аппарате радиоэлектронной борьбы, управляемом с поста дистанционного управления по беспроводному каналу, дополнительно используют наземный высокопроходимый мобильный робот для постановки радиопомех большой мощности, дистанционно управляемый совместно с беспилотным летательным аппаратом радиоэлектронной борьбы, причем управление перемещением мобильного робота в заданный район и работой постановщика радиопомех осуществляют по беспроводному каналу связи напрямую, а при пропадании прямого канала связи операцию управления перемещением в заданный район и радиоподавлением выполняют опосредованно через ретранслятор, установленный на борту беспилотного летательного аппарата радиоэлектронной борьбы.
Благодаря новой совокупности существенных признаков за счет того, что дополнительно вводится наземный высокопроходимый дистанционно управляемый мобильный робот, используемый для доставки постановщика радиопомех большей мощности и организации гарантированного управления через ретранслятор БПЛА РЭБ, позволяет снять энергетические, массогабаритные и временные ограничения на ресурсы постановщика радиопомех.
Известен комплекс на базе БПЛА РЭБ «Мошкара», предназначенный для энергетического подавления современных УКВ войсковых линий радиосвязи (Павлушенко М. Беспилотные летательные аппараты: история применения, стр. 222-223. См. интернет ресурс http://bwbooks.net/index.php?id1=4&category=tehnika&author=pavlushenko-m&book=2005). Дальность действия комплекса 30 км с возвратом БПЛА, 60 км - без возврата БПЛА РЭБ. Радиус подавления типовых радиолиний в УКВ-диапазоне 10 км, время полета один час, из них 30 минут - работа на излучение. Пункт управления представляет собой персональный компьютер с радиомодемом.
В качестве недостатка устройства-аналога следует отметить существенные ограничения по массогабаритным и энергетическим характеристикам навесного оборудования, незначительное время продолжительности полета БПЛА.
Наиболее близким к заявляемому является мобильный робототехнический комплекс (см. Пат. РФ №2574547, МПК B25J 5/00, опубл. 20.12.2015 г.).
Устройство-прототип содержит мобильный робот, пост дистанционного управления, комплект дополнительного оборудования, причем мобильный робот представляет собой самоходное транспортное средство с электроприводом движителя и бортовыми источниками питания, на котором смонтирована система дистанционной связи с постом дистанционного управления, бортовая телевизионная система, которая включает отдельные видеоблоки, расположенные на звеньях многостепенного манипулятора и на корпусе транспортного средства, причем каждый видеоблок содержит видеокамеру, заключенную в защитный кожух с источниками подсветки, и по меньшей мере один из видеоблоков, выполняющий обзорные функции, расположен на рабочем органе привода индивидуального наведения в горизонтальной и вертикальной плоскостях, при этом на транспортном средстве укреплены манипулятор с захватным устройством и его приводы, система сигнализации, разъемы для подключения бортового сервисного оборудования и зарядного устройства, кронштейны для укрепления бортового оборудования и бортовая система диагностики с бортовыми пультами управления, а на БПЛА смонтирована система видеонаблюдения с бортовым устройством передачи сигналов оператору по беспроводному каналу связи, находящемуся на посту дистанционного управления.
Устройство-прототип представляет из себя необходимую совокупность средств доставки поставщиков радиопомех (наземный и воздушный), управляемые с единого поста дистанционного управления. При этом на мобильном (наземном) роботе может быть размещен постановщик радиопомех повышенной мощности.
В качестве недостатка прототипа следует отметить следующее. При пропадании в силу разных причин канала связи управление подвижным роботом теряется и последний становится легкой добычей противодействующей стороны. Кроме того, без дополнительного оборудования с его помощью не реализуется функция радиоподавления.
Задачей заявляемого технического решения является обеспечение устойчивого управления мобильным робототехническим комплексом РЭБ в различных условиях его функционирования с одновременной реализацией функции радиоподавления.
Поставленная задача достигается тем, что в известном мобильном робототехническом комплексе, состоящем из мобильного робота, поста дистанционного управления и беспилотного летательного аппарата радиоэлектронной борьбы, причем мобильный робот выполнен в виде самоходного транспортного устройства с электроприводом движителя и бортовыми источниками питания, на котором смонтирована бортовая телевизионная система, расположенная на корпусе транспортного средства, заключенная в защитный кожух с возможностью выполнения обзорных функций, размещена на рабочем органе привода индивидуального наведения в горизонтальной и вертикальной плоскостях, блок связи, содержащий как минимум три приемных и один передающий радиоканал с возможностью обеспечения связи с постом дистанционного управления, причем пост дистанционного управления по первому для мобильного робота приемному каналу имеет возможность управления его движением благодаря подключению к органам управления мобильного робота, по второму приемному каналу имеется возможность управления телевизионной камерой за счет подключения к органу привода индивидуального наведения, по третьему приемному каналу реализована возможность управления переключением бортовой системы диагностики и индикации подвижного робота, а по передающему каналу реализована возможность передачи видеосигнала от телевизионной камеры и сигналов бортовой системы диагностики на пост дистанционного управления, дополнительно введены постановщик радиопомех из последовательно соединенных блока создания преднамеренных радиопомех и блока управления, группа входов которого соединена с группой выходов третьего приемного канала блока связи, последовательно соединенные контейнер со взрывчаткой и взрывателем, и дешифратор, предназначенные для уничтожения мобильного робота в чрезвычайной ситуации по команде с поста дистанционного управления, группа входов которого соединена с группой выходов первого приемного канала блока связи, при этом на мобильном роботе укреплены система сигнализации, разъемы для подключения бортового сервисного оборудования и бортовая система диагностики с бортовыми пультами управления и индикации, а беспилотный летательный аппарат радиоэлектронной борьбы снабжен системой видеонаблюдения с двухканальным блоком связи с возможностью организации связи с постом дистанционного управления, при этом по приемному каналу блока связи имеется возможность управлять полетом беспилотного летательного аппарата радиоэлектронной борьбы, а с помощью передающего канала обеспечена возможность передачи на пост дистанционного управления видеосигналов с борта беспилотного летательного аппарата радиоэлектронной борьбы, дополнительно введены постановщик радиопомех из последовательно соединенных блока формирования преднамеренных радиопомех и блока управления, и четырехканальный приемопередатчик с возможностью ретрансляции радиосигналов поста дистанционного управления для опосредованного управления перемещением мобильного робота в заданный район и радиоподавлением через беспилотный летательный аппарат радиоэлектронной борьбы и получения от мобильного робота сигналов видеокамеры, группа выходов третьего приемного канала которого соединена с группой входов блока управления.
При этом пост дистанционного управления выполнен интегрированным с совмещением в себе автоматизированных рабочих мест управления мобильным роботом, БПЛА РЭБ и управления радиоподавлением.
Движитель мобильного робота инвариантен к источнику используемой энергии: электричество, бензин или дизельное топливо, а постановщик радиопомех целесообразно устанавливать на средний БПЛА РЭБ.
Перечисленная новая совокупность существенны признаков за счет того, что вводятся новые элементы и связи позволяет решить поставленную задачу: обеспечить устойчивое управление мобильным робототехническим комплексом РЭБ в различных условиях его функционирования.
Заявляемые объекты поясняются чертежами, на которых показаны:
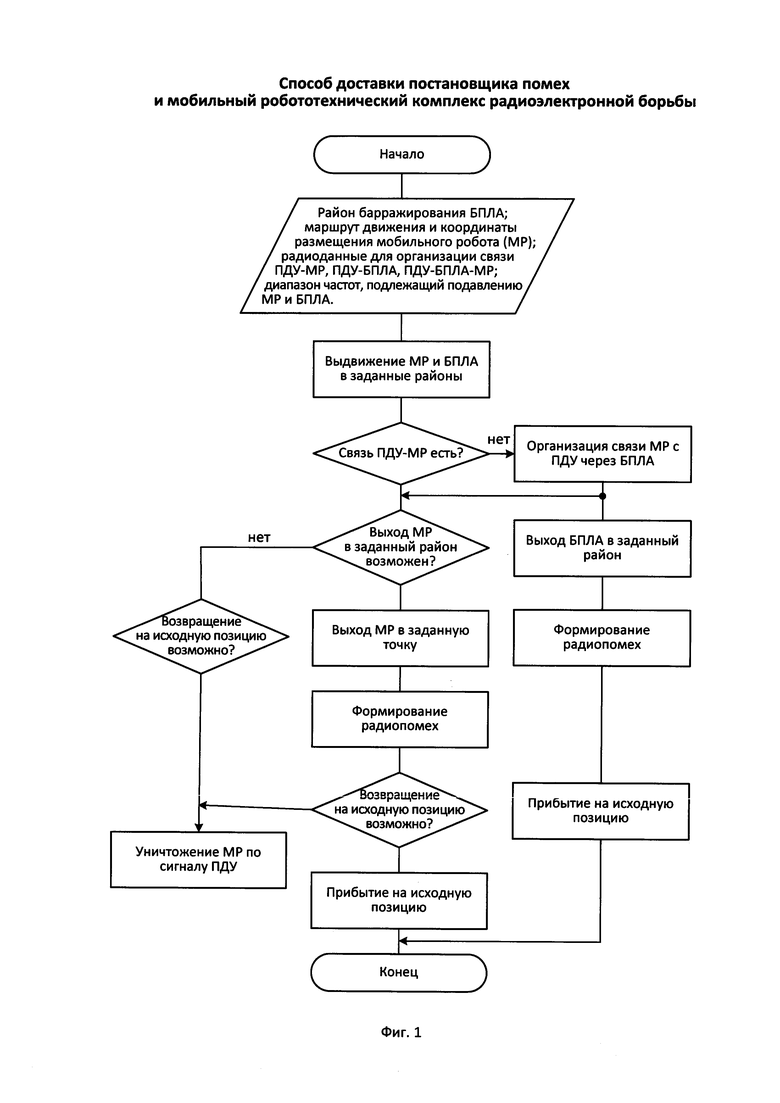
на фиг. 1 - обобщенный алгоритм доставки постановщиков радиопомех;
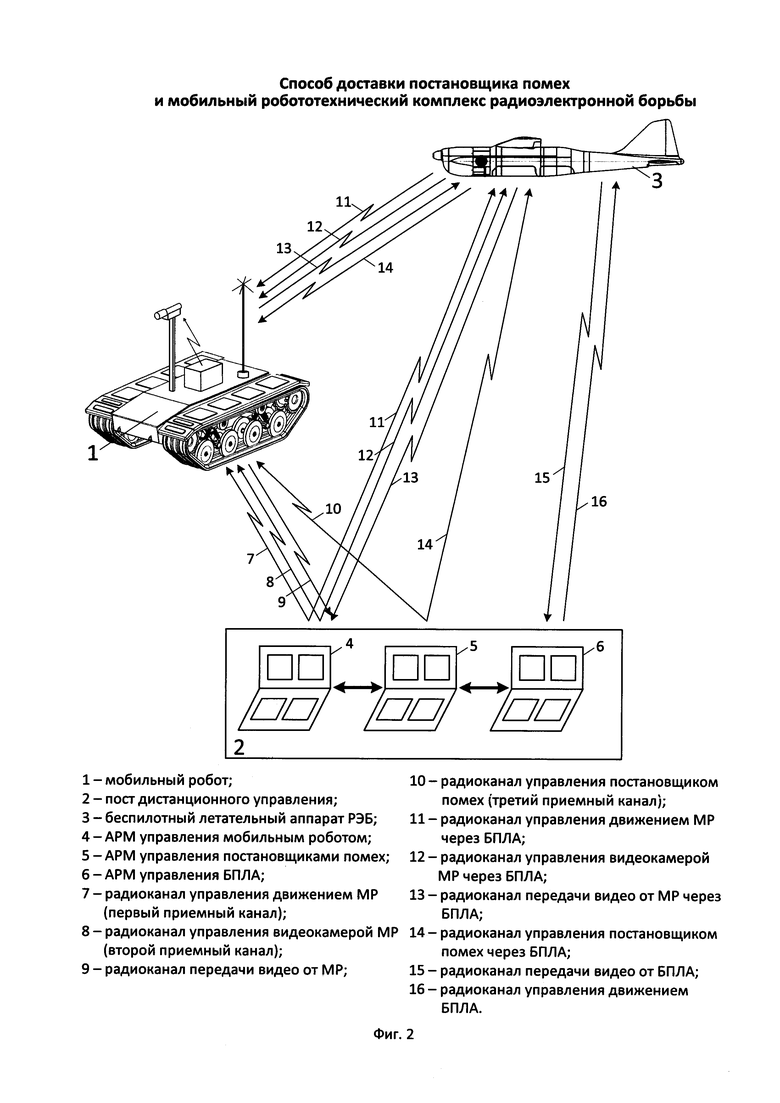
на фиг. 2 - обобщенная структурная схема мобильного робототехнического комплекса РЭБ;
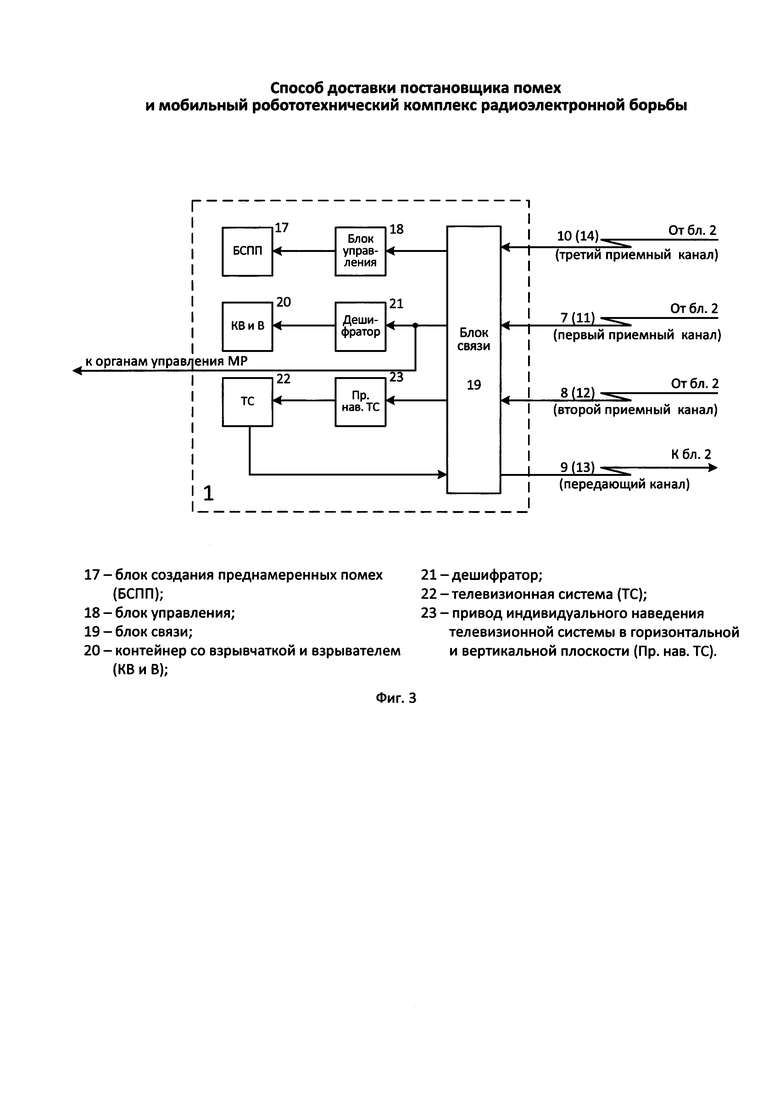
на фиг. 3 - обобщенная структурная схема радиоэлектронного оборудования мобильного робота;
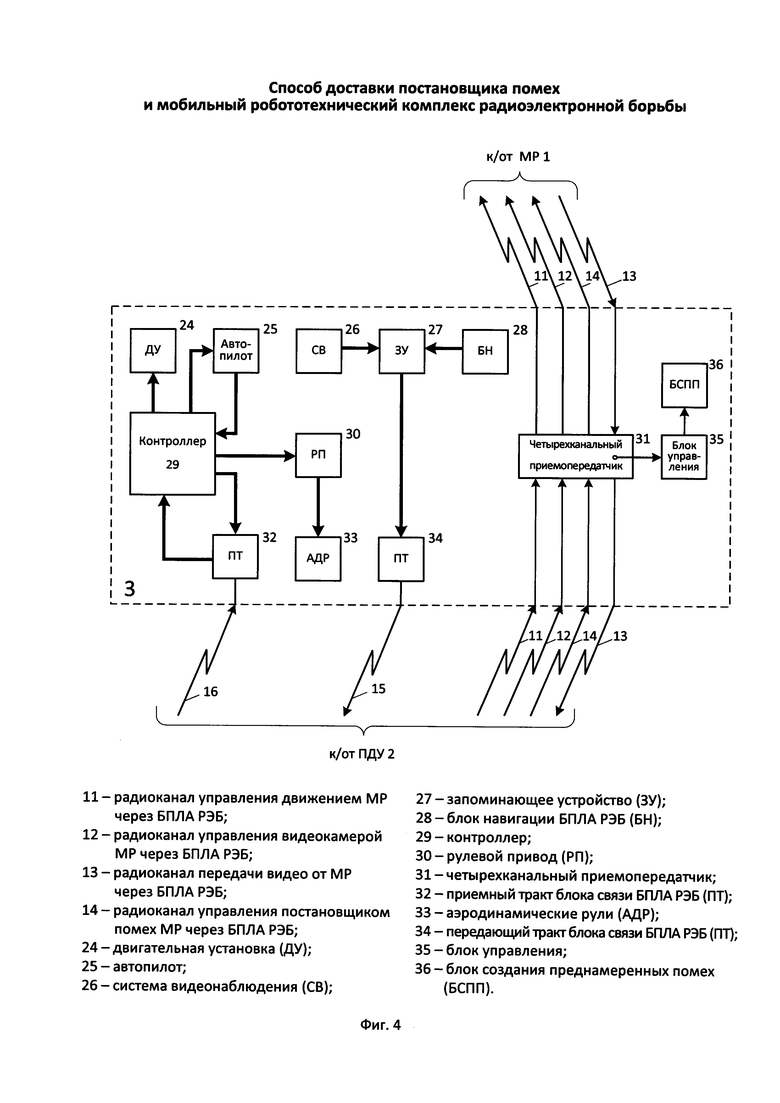
на фиг. 4 - обобщенная структурная схема БПЛА РЭБ.
Сущность заявляемого способа состоит в следующем (см. фиг. 1 и 2). На подготовительном этапе на основе анализа радиоэлектронной обстановки определяют район барражирования БПЛА РЭБ, маршрут движения и пункт (координаты) назначения мобильного робота (MP), диапазоны частот, подлежащие радиоподавлению, формируют радиоданные для обеспечения информационного обмена между постом дистанционного управления (ПДУ) и БПЛА РЭБ и MP. Предусматривают и дополнительный вариант организации связи и управления на случай пропадания прямого канала управления ПДУ-MP. В этом случае управление мобильным роботом должно осуществляться через ретранслятор БПЛА РЭБ. Оборудование необходимое для получения необходимых исходных данных, не рассматривается в рамках данного способа.
После задания исходных данных и определения времени начала выдвижения мобильный робототехнический комплекс РЭБ переходит в рабочий режим. На первом этапе осуществляется выдвижение БПЛА РЭБ и MP в заданные районы. Управление данным процессом осуществляется с соответствующих автоматизированных рабочих мест (АРМ) поста дистанционного управления по радиоканалам. При этом движение MP на маршруте выдвижения корректируется оператором в соответствии с показаниями телевизионной камеры.
Пропадание прямого канала управления MP в предлагаемом способе не приводит к потере управления. Прерывание связи (осуществляемой как правило в УКВ-СВЧ-диапазонах радиоволн) возникает из-за особенностей рельефа местности на трассе движения MP (отсутствия прямой видимости), значительной удаленности заданной точки выдвижения или воздействием преднамеренных радиопомех. При возникновении названной ситуации управление движением MP продолжается через ретранслятор, расположенный на борту БПЛА РЭБ. С этой целью район барражирования БПЛА РЭБ и конечная (рабочая) точка маршрута MP, как правило, взаимно коррелированы. Управление движением MP осуществляется с АРМ поста дистанционного управления по видеоинформации, поступающей на его вход с MP и БПЛА РЭБ.
При достижении MP заданной точки (последняя может уточняться по видеоданным) предлагаемый комплекс РЭБ приступает к формированию радиопомех. Полоса частот или конкретные номиналы частот, подлежащие подавлению, задают с соответствующего АРМ управления радиоподавлением поста дистанционного управления по результатам анализа частотного диапазона.
Постановщик радиопомех, размещенный на БПЛА РЭБ также принимает участие в постановке радиопомех. Управление данным процессом осуществляют с АРМ управления радиоподавлением поста дистанционного управления комплекса РЭБ. При этом задания по радиоподавлению постановщикам радиопомех MP и БПЛА могут отличаться. Следует отметить, что совместное размещение на борту малого БПЛА, например, «Орлан-10» ретранслятора, постановщика радиопомех и видеокамеры с блоком связи представляется затруднительным из-за энергетических и массогабаритных ограничений. Поэтому в рамках данной заявки рассматриваются средние БПЛА, например, «Орлан-30».
После завершения поставленной задачи MP и БПЛА РЭБ под управлением соответствующих АРМ поста дистанционного управления возвращаются на исходную позицию.
В результате обеспечивается радиоподавление заданных объектов в непосредственной близости от них. Последнее обеспечивает существенный выигрыш по энергетике формируемых радиопомех при отсутствии негативного воздействия на радиосредства своих войск. Мощность постановщика радиопомех на MP может превышать на порядок и более мощность постановщика радиопомех на БПЛА РЭБ. Кроме того, обеспечивается непрерывность управления MP.
В процессе выдвижения MP в заданную точку возможно возникновение ситуации, когда ее достижение невозможно. В этом случае АРМ управление MP формирует команду на его возвращение на исходную позицию, а по видеоданным осуществляется управление его движением.
При возникновении негативной ситуации, когда движение MP оказалось блокировано противодействующей стороной, АРМ управления MP формирует команду на его уничтожение. Команда передается по радиоканалу непосредственно на MP или через ретранслятор БПЛА РЭБ.
Мобильный робототехнический комплекс РЭБ (см. фиг. 2) включает в свой состав мобильный робот 1, пост дистанционного управления 2 и беспилотный летательный аппарат РЭБ 3, причем пост дистанционного управления содержит автоматизированное рабочее место 4 управления MP, соединенное по беспроводным каналам управления с MP: управления движением MP 7 (11), управления видеокамерой MP 8 (12), радиоканал приема видео от MP 9 (13); АРМ управления постановщиками радиопомех 5, соединенное каналами связи 10 (14) с MP 1 и 14 с БПЛА РЭБ 3; АРМ 6 управления движением БПЛА РЭБ 3, соединенное радиоканалом 16 управления БПЛА, и каналом приема видео 15.
Работа мобильного робототехнического комплекса осуществляется следующим образом. Выдвижение MP 1 и БПЛА РЭБ 3 в заданные районы осуществляется под управлением АРМ 4 и 6 соответственно по радиоканалам 7 и 16. Видеоданные, поступающие от MP 1 по каналу 9, позволяют учитывать рельеф местности, обходить естественные и искусственные преграды. Управление видеокамерой MP 1 осуществляется по радиоканалу 8.
При пропадании прямого канала управления (каналов 7, 8, 9 и 10) управление MP 1 осуществляют через ретранслятор, расположенный на борту БПЛА РЭБ 3. Для этой цели используются радиоканалы 11, 12, 13 и 14. Управление собственно БПЛА РЭБ 3 осуществляют с АРМ 6 по каналам радиосвязи 15 и 16.
После достижения заданной рабочей точки MP 1 осуществляют уточнение ее пригодности и при необходимости смещают мобильный робот 1 на необходимое расстояние. Далее приступают к формированию радиопомех. Исходные данные (номиналы частот, полосы частот и т.д.) поступают на постановщики радиопомех MP 1 и БПЛА РЭБ 3 по радиоканалам 10 (14) и 14 соответственно. Управляющая информация для постановщика радиопомех на МР1 и БПЛА РЭБ 3 может передаваться по одному каналу 14, однако каждый из них выполняет индивидуальное задание (в команде управления присутствует признак исполнителя).
Далее по завершению цикла радиоподавления по команде с ПДУ 2 мобильный робот 1 и БПЛА 3 возвращаются в исходный район.
Возникновение нерешаемых проблем при выдвижении MP 1 в рабочую точку приводит к необходимости его досрочного возврата в исходный район. Управление движением MP 1 осуществляют аналогично с помощью радиоканалов 7(11) и 9 (13) с возможностью использования дополнительной видеоинформации, получаемой по каналу 15 с БПЛА РЭБ 3.
В случае возникновения критической ситуации, связанной с захватом неприятелем MP 1, пост дистанционного управления 2 (АРМ 4) формирует команду на подрыв робота, которая передается по каналу управления 7 или 11.
Реализация всех элементов мобильного робототехнического комплекса РЭБ известна и трудностей не вызывает.
В качестве транспортной базы мобильного робота может быть использовано аналогичное прототипу самоходное телеуправляемое средство или гусеничное бронирование шасси на резинометаллических гусеницах с пружинно-гидравлическими подвесками опорных катков (см. Пат РФ №2548207, МПК F41H 7/00, опубл. 20.04.2015 г. Робототехнический комплекс разведки и огневой поддержки). Гусеничное бронирование шасси дополняется радиоэлектронным оборудованием, структурная схема которого представлена на фиг. 3.
Радиоэлектронное оборудование MP 1 включает блок связи 19, содержащий первый приемный канал 7 (11), выход которого соединен с органами управления MP 1 и входом дешифратора 21, выход которого соединен со входом контейнера со взрывчаткой и взрывателем 20, второй приемный канал 8 (12) блока 19 соединен с входом привода индивидуального наведения телевизионной системы в горизонтальной и вертикальной плоскостях 23, выход которого соединен со входом телевизионной системы 22, выход которой соединен со входом блока связи 19, выход которого является передающим каналом 9(13) блока связи 19, третий приемный канал 10 (14) блока связи 19 соединен со входом блока управления 18, выход которого соединен со входом блока создания преднамеренных радиопомех 17. Совокупность блоков 17 и 18 представляют собой постановщик радиопомех MP 1.
Реализация телевизионной системы 22 и привода индивидуального наведения телевизионной системы в горизонтальной и вертикальной плоскостях 23 известна и трудностей не вызывает. Могут быть реализованы с помощью изделия EVS, которое с помощью блока 19 в цифровом формате передает на ПДУ 2 (АРМ 4) видеоизображение в диапазоне 2,4 ГГц. Скорость передачи информации составляет 4 Мбит/с. При передаче в формате JPEG возможна передача двух-четырех кадров высокого разрешения в секунду или десяти-двенадцати кадров низкого разрешения в секунду при поддерживаемом разрешении 1600×1200 или 640×480 соответственно.
Блок управления 18 предназначен для преобразования команды, поступившей от ПДУ 2 (АРМ 5) и принятой блоком 19 к виду, необходимому для ее восприятия (настройки) блоком создания преднамеренных радиопомех 17.
Блок создания преднамеренных радиопомех 17 и блок управления 18 могут быть реализованы с помощью последовательно подключенных анализатора частоты компании MINI-CIRCUITS (см. Ю. Никитин. Генераторы, управляемые напряжением компании MINI-CIRCUITS для радиочастотных синтезаторов // Компоненты и технологии, №3, 2003 г.) и усилителя мощности этой же фирмы ZHL-100 W-GAN+.
Дешифратор 21 предназначен для преобразования команды, поступившей от ПДУ 2 (АРМ 4) по первому приемному каналу 7 (11), в необходимое воздействие на взрыватель блока 20. Его реализация известна и трудностей не вызывает. Блок 19 реализуется аналогично соответствующему блоку устройства - прототипа.
Реализация беспилотного летательного аппарата РЭБ 3 известна и трудностей не вызывает (см. фиг. 4). В качестве БПЛА может быть использован «Орлан-30», ООО «СТЦ» г. Санкт-Петербург. Если на борту БПЛА не устанавливают передатчик радиопомех (БПЛА используют для ведения видеонаблюдения и организации связи с MP 1) возможно использование «Орлан-10» того же производителя.
БПЛА РЭБ 3 содержит двигательную установку 24, автопилот 25, систему видеонаблюдения 26, запоминающее устройство 27, блок навигации БПЛА РЭБ 28, контроллер 29, рулевой привод 30, четырехканальный приемопередатчик 31, приемный тракт блока связи БПЛА РЭБ 32, аэродинамические рули 33, передающий тракт блока связи БПЛА РЭБ 34, блок управления 35 и блок создания преднамеренных радиопомех 36. Реализация блоков с 24 по 30, с 32 по 34 и порядок их функционирования рассмотрены в Пат. РФ №2550811, МПК G01S 13/46, опубл. 20.05.2015 г.
Четырехканальный приемопередатчик 31 предназначен для реализации функции ретрансляции сигналов ПДУ 2 и MP 1. Реализация блока 31 широко освещена в литературе и трудностей не вызывает. Может быть реализован в соответствии с Пат. РФ №2436240, МПК H04D 7/04, опубл. 10.12.2011 г.
Блок управления 35 и блок создания преднамеренных радиопомех 36 представляют собой постановщик радиопомех БПЛА РЭБ 3 и предназначены для формирования помехового сигнала на основе команд, поступающих от ПДУ 2 (АСУ 5) по радиоканалу 14. Реализуют аналогично соответствующим блокам 18 и 17 соответственно. Отличие состоит в том, что используют усилитель ZHL с меньшей выходной мощностью из-за ограничений по массогабаритным и энергетическим параметрам на борту БПЛА РЭБ 3.
Пост дистанционного управления 2 содержит три АРМ, предназначенных для управления движением MP 1 и БПЛА РЭБ (АРМ 4 и АРМ 6 соответственно) и порядком формирования преднамеренных радиопомех (АРМ 5). Управление движением MP 1 и БПЛА РЭБ 3 осуществляется по низкоскоростным каналам связи 7 (11) и 16 соответственно на частотах 900-920 МГц в режиме псевдослучайной перестройки рабочей частоты (ППРЧ). По каналу 7 (11) задается маршрут движения MP 1 с учетом видеоданных, поступающих на АРМ 4 по высокоскоростному каналу 9 (13). Кроме того, для этой цели могут использоваться видеоданные с борта БПЛА РЭБ 1, поступающие по высокоскоростному радиоканалу 15 на АРМ 6 и далее по каналу обмена информацией между АРМ ПДУ 2 на вход АРМ 4.
С помощью АРМ 6 по низкоскоростному каналу 16 на частотах 900-920 МГц в режиме ППРЧ осуществляют задание маршрута, высоту полета и порядок облета (проход на высоте или барражирование и т.д.) Видеоданные, поступающие с борта БПЛА РЭБ 3 по каналу радиосвязи 15, учитывают в процессе управления его полетом, обнаружением на местности подавляемых радиосредств.
АРМ 5 осуществляет управление средствами радиоподавления мобильного комплекса РЭБ. В его задачу входит определение задач каждому постановщику радиопомех (располагаемых на MP 1 и БПЛА РЭБ 3) в зависимости от текущей радиоэлектронной обстановки, местоположения постановщиков радиопомех, их энергетического потенциала, доступности подавляемых радиосредств, оперативной обстановки в районе функционирования комплекса и др. Данные о радиоэлектронной обстановке добываются отдельными средствами, которые в рамках заявки не рассматриваются, а на вход АРМ 5 поступают по отдельному радиоканалу.
Данные о местоположении постановщиков радиопомех поступают на вход АРМ 5 от АРМ 4 и АРМ 6. Все АРМ ПДУ 2 содержат средства связи (модемы) и компьютер со специальным программным обеспечением. В качестве последнего может быть использован ноутбук.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ доставки постановщиков помех и беспилотный робототехнический комплекс радиоэлектронной борьбы | 2016 |
|
RU2625206C1 |
| Способ комплексного применения роботизированных средств огневого поражения и радиоэлектронного подавления системы активной защиты бронетехники | 2020 |
|
RU2746772C1 |
| Мобильный роботехнический комплекс | 2024 |
|
RU2828909C1 |
| СПОСОБ РАДИОПОДАВЛЕНИЯ КАНАЛОВ СВЯЗИ СРЕДСТВАМИ РАДИОЭЛЕКТРОННОЙ БОРЬБЫ С ИСПОЛЬЗОВАНИЕМ ЕН-АНТЕНН | 2022 |
|
RU2801842C1 |
| Способ доставки передатчиков радиопомех приемным устройствам наземных радиоэлектронных средств спутниковых систем радиосвязи и радионавигации | 2024 |
|
RU2825033C1 |
| Мультиагентная робототехническая система | 2017 |
|
RU2658684C1 |
| БЕСПИЛОТНЫЙ РОБОТОТЕХНИЧЕСКИЙ КОМПЛЕКС ДИСТАНЦИОННОГО МОНИТОРИНГА И БЛОКИРОВАНИЯ ПОТЕНЦИАЛЬНО ОПАСНЫХ ОБЪЕКТОВ ВОЗДУШНЫМИ РОБОТАМИ, ОСНАЩЕННЫЙ ИНТЕГРИРОВАННОЙ СИСТЕМОЙ ПОДДЕРЖКИ ПРИНЯТИЯ РЕШЕНИЙ ПО ОБЕСПЕЧЕНИЮ ТРЕБУЕМОЙ ЭФФЕКТИВНОСТИ ИХ ПРИМЕНЕНИЯ | 2007 |
|
RU2353891C1 |
| МОБИЛЬНЫЙ РОБОТОТЕХНИЧЕСКИЙ КОМПЛЕКС | 2017 |
|
RU2709074C1 |
| Система обнаружения и противодействия беспилотным воздушным судам | 2023 |
|
RU2809997C1 |
| НАЗЕМНЫЙ РОБОТОТЕХНИЧЕСКИЙ КОМПЛЕКС | 2017 |
|
RU2678553C1 |
Изобретение относится к робототехническому комплексу радиоэлектронной борьбы (РЭБ), предназначенному для дистанционной работы в труднодоступных и опасных для присутствия человека местах. Для наземной и воздушной доставки постановщиков радиопомех используют мобильный комплекс РЭБ на беспилотном летательном аппарате радиоэлектронной борьбы, управляемом с поста дистанционного управления по беспроводному каналу, и наземном высокопроходимом мобильном роботе для постановки радиопомех большей мощности, дистанционно управляемом совместно с беспилотным летательным аппаратом радиоэлектронной борьбы. При этом управление перемещением мобильного робота в заданный район и работой постановщика радиопомех осуществляют по беспроводному каналу связи напрямую, а при пропадании прямого канала связи операцию управления перемещением и радиоподавлением выполняют опосредованно через ретранслятор, установленный на борту беспилотного летательного аппарата радиоэлектронной борьбы. Изобретение обеспечивает устойчивое управление мобильным робототехническим комплексом РЭБ в различных условиях его функционирования. 2 н. и 2 з.п. ф-лы, 4 ил.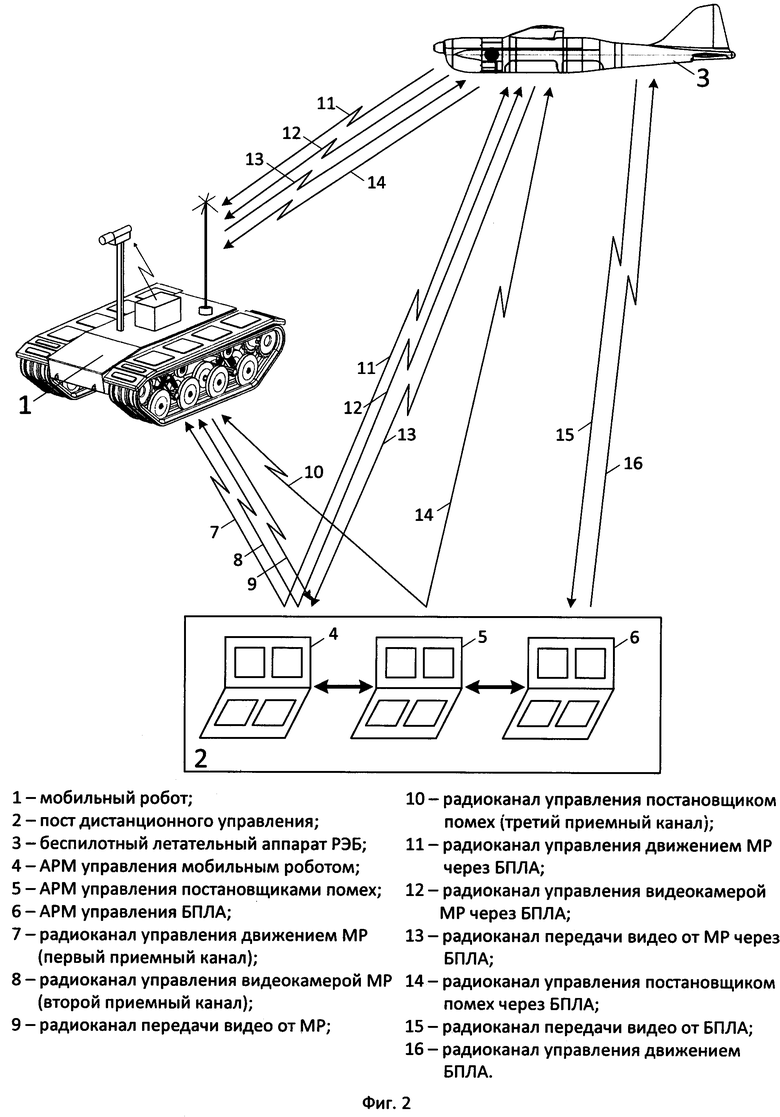
1. Способ наземной и воздушной доставки постановщиков радиопомех, включающий использование мобильного робототехнического комплекса радиоэлектронной борьбы, содержащего беспилотный летательный аппарат радиоэлектронной борьбы, управляемый с поста дистанционного управления по беспроводному каналу, и наземный высокопроходимый мобильный робот для постановки радиопомех большей мощности, дистанционно управляемый совместно с беспилотным летательным аппаратом радиоэлектронной борьбы, причем управление перемещением мобильного робота в заданный район и работой постановщика радиопомех осуществляют по беспроводному каналу связи напрямую, а при пропадании прямого канала связи операцию управления перемещением и радиоподавлением выполняют опосредованно через ретранслятор, установленный на борту беспилотного летательного аппарата радиоэлектронной борьбы.
2. Мобильный робототехнический комплекс радиоэлектронной борьбы, содержащий мобильный робот, пост дистанционного управления и беспилотный летательный аппарат радиоэлектронной борьбы, причем мобильный робот выполнен в виде самоходного транспортного устройства с электроприводом движителя и бортовыми источниками питания, на котором смонтирована бортовая телевизионная система, расположенная на корпусе транспортного средства, заключенная в защитный кожух с возможностью выполнения обзорных функций, размещенная на рабочем органе привода индивидуального наведения в горизонтальной и вертикальной плоскостях, блок связи, содержащий как минимум три приемных и один передающий радиоканал с возможностью обеспечения связи с постом дистанционного управления, причем пост дистанционного управления по первому для мобильного робота приемному каналу имеет возможность управления его движением за счет подключения к органам управления мобильного робота, по второму приемному каналу имеется возможность управления телевизионной камерой за счет подключения к органу привода индивидуального наведения, по третьему приемному каналу реализована возможность управления бортовой системой диагностики и индикации мобильного робота, а по передающему каналу реализована возможность передачи видеосигнала от телевизионной камеры на пост дистанционного управления, при этом постановщик радиопомех на мобильном роботе состоит из последовательно соединенных блока создания преднамеренных радиопомех и блока управления, группа входов которого соединена с группой выходов третьего приемного канала блока связи, последовательно соединенные контейнер со взрывчаткой и взрывателем и дешифратор, предназначенные для уничтожения мобильного робота в чрезвычайной ситуации по команде с поста дистанционного управления, группа входов которого соединена с группой выходов первого приемного канала блока связи, при этом на мобильном роботе укреплены система сигнализации, разъемы для подключения бортового сервисного оборудования и упомянутая бортовая система диагностики с бортовыми пультами управления и индикации, а беспилотный летательный аппарат радиоэлектронной борьбы снабжен системой видеонаблюдения с двухканальным блоком связи с возможностью организации связи с постом дистанционного управления, при этом по приемному каналу блока связи имеется возможность управлять полетом беспилотного летательного аппарата радиоэлектронной борьбы, а с помощью передающего канала обеспечена возможность передачи на пост дистанционного управления видеосигналов с борта беспилотного летательного аппарата радиоэлектронной борьбы, при этом постановщик радиопомех на беспилотном летательном аппарате состоит из последовательно соединенных блока формирования преднамеренных радиопомех и блока управления, а на борту беспилотного летательного аппарата установлен четырехканальный приемопередатчик с возможностью ретрансляции радиосигналов поста дистанционного управления для опосредованного управления перемещением мобильного робота в заданный район и радиоподавлением через беспилотный летательный аппарат радиоэлектронной борьбы и получения от мобильного робота сигналов видеокамеры, группа выходов третьего приемного канала которого соединена с группой входов блока управления.
3. Комплекс по п. 2, отличающийся тем, что пост дистанционного управления выполнен интегрированным с совмещением в себе автоматизированных рабочих мест управления мобильным роботом, беспилотным летательным аппаратом радиоэлектронной борьбы и управления радиоподавлением.
4. Комплекс по п. 2, отличающийся тем, что движитель мобильного робота инвариантен к источнику энергии, относящемуся к электричеству, бензину или дизельному топливу.
| СПОСОБ ДОСТАВКИ ПОСТАНОВЩИКА РАДИОПОМЕХ | 2008 |
|
RU2361233C1 |
| СРЕДСТВО ПОСТАНОВКИ РАДИОПОМЕХ | 1997 |
|
RU2131107C1 |
| БЕСПИЛОТНЫЙ РОБОТОТЕХНИЧЕСКИЙ КОМПЛЕКС ДИСТАНЦИОННОГО МОНИТОРИНГА И БЛОКИРОВАНИЯ ПОТЕНЦИАЛЬНО ОПАСНЫХ ОБЪЕКТОВ ВОЗДУШНЫМИ РОБОТАМИ, ОСНАЩЕННЫЙ ИНТЕГРИРОВАННОЙ СИСТЕМОЙ ПОДДЕРЖКИ ПРИНЯТИЯ РЕШЕНИЙ ПО ОБЕСПЕЧЕНИЮ ТРЕБУЕМОЙ ЭФФЕКТИВНОСТИ ИХ ПРИМЕНЕНИЯ | 2007 |
|
RU2353891C1 |
| РОБОТОТЕХНИЧЕСКИЙ КОМПЛЕКС | 2014 |
|
RU2559194C1 |
| Устройство для подачи наполнителя в скважину | 1985 |
|
SU1348500A1 |

