Изобретение относится к области радиоэлектронной борьбы и может быть использовано для радиоэлектронного подавления абонентских терминалов спутниковых систем связи и аппаратуры потребителей глобальных навигационных спутниковых систем (ГНСС), объединяющим признаком которых являются приемные антенны, ориентированные в верхнюю полусферу.
Радиоэлектронное подавление наземных радиоэлектронных средств (РЭС) спутниковых систем радиосвязи и радионавигации является одним из эффективных способов пресечения их несанкционированного функционирования без применения средств их физического поражения или уничтожения.
Как правило, для радиоэлектронного подавления несанкционированных РЭС применяют помеховые радиосигналы, согласованные по амплитудно-частотным и структурно-временным параметрам с подавляемыми РЭС.
При этом одним из доминантных факторов максимизации эффективности применения помеховых радиосигналов является выполнение условия нахождения приемного устройства несанкционированного РЭС (далее - подавляемое РЭС) в зоне энергетической доступности РЭС, излучающего помеховые радиосигналы (далее - передатчик радиопомех).
Одним из путей обеспечения выполнения этого требования является доставка автономных передатчиков радиопомех в район размещения подавляемого РЭС.
Наиболее эффективным способом доставки передатчиков радиопомех является способ [1], основанный на использовании управляемого с пункта дистанционного управления (ПДУ) по беспроводному каналу беспилотного летательного аппарата (БПЛА), обеспечивающего заброс в район размещения подавляемого РЭС автономных передатчиков радиопомех, выполненных в виде небольших маневренных планеров, «цикад», парашютирующих крыльев, планирующих бомб, надувных воздушных змеев и др., что минимизирует перегрузку забрасываемых передатчиков радиопомех в момент их контакта с землей.
Указанный способ характеризуется рядом недостатков:
- высокая сложность оборудования и, соответственно, высокая стоимость беспилотного летательного аппарата, управляемого с пункта дистанционного управления;
- низкая эффективность заброшенных и расположенных на земной поверхности автономных передатчиков радиопомех по подавлению наземных РЭС спутниковых систем радиосвязи и радионавигации по причинам помехового воздействия по боковым или задним лепесткам диаграммы направленности приемных антенн подавляемых РЭС, а также затухания помехового радиосигнала при его распространении вдоль земной поверхности от передающей антенны наземного передатчика радиопомех до приемной антенны подавляемого наземного РЭС с учетом рельефа местности.
Техническим результатом изобретения является повышение эффективности радиоэлектронного подавления наземных РЭС спутниковых систем радиосвязи и радионавигации автономными передатчиками радиопомех, доставляемыми в рабочую зону с помощью беспилотных летательных аппаратов, при снижении сложности оборудования и стоимости беспилотных летательных аппаратов - носителей передатчиков радиопомех.
Технический результат изобретения достигается тем, что в качестве БПЛА используется неуправляемый свободный аэростат (воздушный шар), наполненный газом, объем которого зависит от заданной высоты полета, запускаемый вместе с включенным на излучение ПРП, питающимся от аккумуляторной батареи (АКБ), со стартовой позиции, размещаемой на земной поверхности с учетом известного направления ветра и известного местоположения подавляемого РЭС, доставляемый вместе с ПРП и АКБ в рабочую зону радиоэлектронного подавления движущимися воздушными массами, при этом ПРП и АКБ с БПЛА не сбрасываются и вместе с БПЛА перемещаются ветром в пределах рабочей зоны радиоэлектронного подавления, а непрерывность радиоэлектронного подавления РЭС обеспечивается за счет последовательного запуска серии БПЛА с ПРП и АКБ, в которой интервал между запусками определяется скоростью ветра и размерами рабочей зоны радиоэлектронного подавления, а количество запускаемых БПЛА с ПРП и АКБ определяет продолжительность радиоэлектронного подавления РЭС.
Сущность изобретения поясняется рисунками.
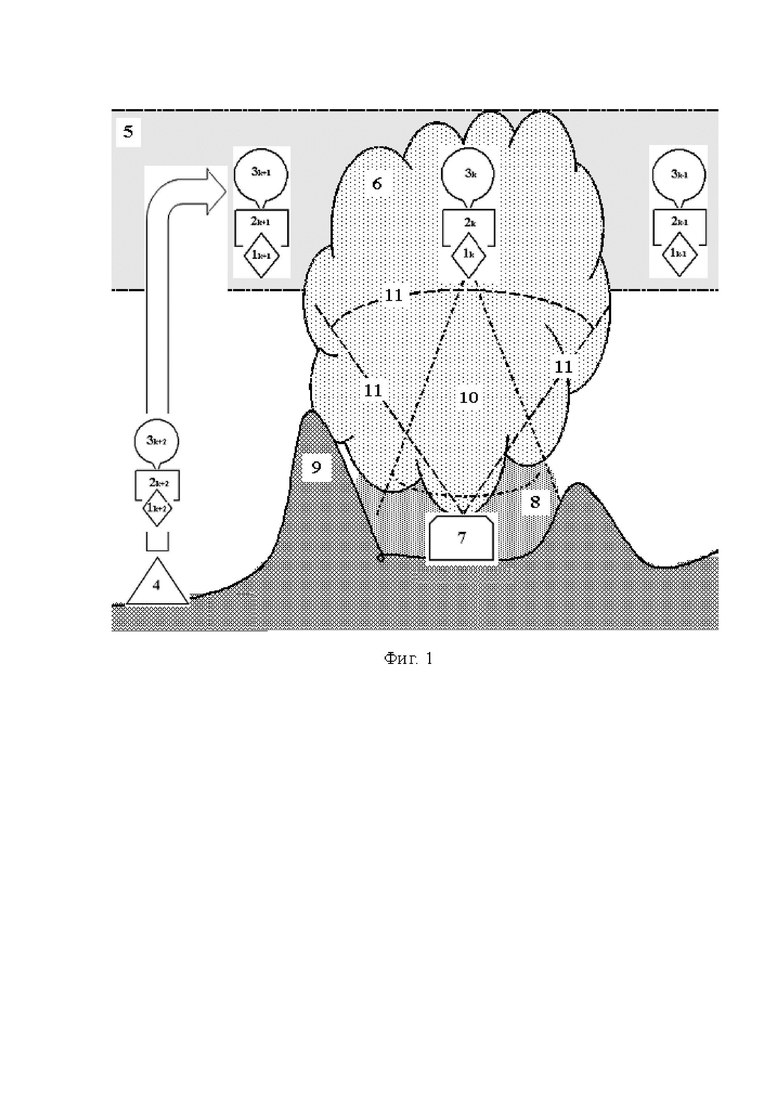
На фиг.1 приведена структурная схема предлагаемого способа доставки передатчиков радиопомех приемным устройствам наземных радиоэлектронных средств спутниковых систем радиосвязи и радионавигации.
На фиг. 2 приведена иллюстрация методики выбора местоположения стартовой установки.
На фиг. 3 показана иллюстрация методики выбора интервала между последовательными запусками БПЛА с ПРП и АКБ со стартовой установки.
На схеме предлагаемого способа (фиг. 1) изображены передатчики радиопомех 1k , k=1, …, K, с аккумуляторными батареями (АКБ) 2k , k=1, …, K, носителем которых является БПЛА (неуправляемый свободный аэростат) 3k , k=1, …, K, запускаемый с мобильной стартовой установки 4, расположенной на земной поверхности. Перед запуском БПЛА 3k наполняется газом, объем которого зависит от заданной высоты полета в атмосферном слое 5. Выбор местоположения стартовой позиции 4, размещаемой на земной поверхности, осуществляется с учетом известного (прогностического или измеренного) направления и скорости ветра, а также известного местоположения подавляемого РЭС 7 и заданного времени доставки ПРП 1k и АКБ 2k в рабочую зону 6.
Доставка БПЛА 3k с ПРП 1k и АКБ 2k в рабочую зону 6 для радиоэлектронного подавления РЭС 7 осуществляется движущимися воздушными массами. Подавляемое РЭС 7 расположено на земной поверхности в зоне 8 энергетической недоступности для наземных источников радиопомех, сигналы которых экранируются рельефом местности 9. При этом пространство 10 основного излучения радиопомех, определяемое диаграммой направленности передающей антенны передатчика радиопомех 1k, пересекается с пространством 11, определяемым диаграммой направленности приемной антенны подавляемого РЭС 7.
Передатчики радиопомех 1k+1 и 1k-1 находятся в атмосферном слое 5, но вне рабочей зоны 6. Передатчик радиопомех 1k-1 является по отношению к активному передатчику радиопомех 1k предыдущим, а передатчик радиопомех 1k+1 следующим в серии запускаемых БПЛА 3k с ПРП 1k и АКБ 2k, обеспечивающих непрерывность излучения радиопомех на интервале заданного времени радиоэлектронного подавления РЭС 7.
На фиг. 1 БПЛА 3k+2, являющийся носителем аккумуляторной батареи 2k+2 и передатчика радиопомех 1k+2, подготовлен к запуску на высоту атмосферного слоя 5 с мобильной стартовой установки 4.
Способ доставки передатчиков радиопомех приемным устройствам наземных радиоэлектронных средств спутниковых систем радиосвязи и радионавигации заключается в следующем.
1) На основании известных координат подавляемого РЭС  в системе координат XOY, где ось OY направлена на Север, а ось OХ направлена на Восток, известных значений метеорологического направления ветра
в системе координат XOY, где ось OY направлена на Север, а ось OХ направлена на Восток, известных значений метеорологического направления ветра  (отсчитывается по часовой стрелке от направления на Север до направления откуда дует ветер) и модуля скорости ветра U, а также заданного времени доставки ПРП 1k и АКБ 2k в рабочую зону
(отсчитывается по часовой стрелке от направления на Север до направления откуда дует ветер) и модуля скорости ветра U, а также заданного времени доставки ПРП 1k и АКБ 2k в рабочую зону  рассчитываются координаты
рассчитываются координаты  точки местоположения, в которой необходимо разместить стартовую установку 4 для обеспечения доставки БПЛА 3k с ПРП 1k и АКБ 2k в рабочую зону радиоэлектронного подавления РЭС 7 (фиг. 2)
точки местоположения, в которой необходимо разместить стартовую установку 4 для обеспечения доставки БПЛА 3k с ПРП 1k и АКБ 2k в рабочую зону радиоэлектронного подавления РЭС 7 (фиг. 2)

2) На основании известной ширины диаграммы направленности приемной антенны подавляемого РЭС 7 θ, известного значения модуля скорости ветра U и заданного значения высоты полета БПЛА 3k с ПРП 1k и АКБ 2k Hпол рассчитывается значение временного интервала Δtзап между последовательными запусками БПЛА 3k с ПРП 1k и АКБ 2k, обеспечивающее непрерывное помеховое воздействие на подавляемое РЭС 7

а также общее количество последовательно запускаемых БПЛА 3k с ПРП 1k и АКБ 2k, необходимое для обеспечения заданной продолжительности радиоэлектронного подавления РЭС 7 TРП (фиг. 3)

3) Стартовая установка 4 размещается на земной поверхности в точке с рассчитанными координатами  .
.
4) Оператор стартовой установки 4 устанавливает ПРП 1k и АКБ 2k на БПЛА 3k так, чтобы диаграмма направленности передающей антенны ПРП 1k была направлена вертикально вниз.
5) Оператор стартовой установки 4 заполняет БПЛА 3k газом, плотность которого ρГ намного меньше плотности воздуха ρВ. При этом объем БПЛА 3k Vшара, требуемый для создания подъемной силы, необходимой для поднятия БПЛА 3k с ПРП 1k и АКБ 2k на заданную высоту полета Hпол, рассчитывается заранее, исходя из массы полезной нагрузки  (совокупность ПРП 1k и АКБ 2k) и заданной высоты полета Hпол
(совокупность ПРП 1k и АКБ 2k) и заданной высоты полета Hпол
 ,
,
где  - плотность атмосферного воздуха на заданной высоте полета Hпол (справочная величина стандартной атмосферы [2]).
- плотность атмосферного воздуха на заданной высоте полета Hпол (справочная величина стандартной атмосферы [2]).
Контроль достижения необходимого объема БПЛА 3k осуществляется по достижению требуемой величины диаметра БПЛА 3k 

6) Осуществляется включение ПРП 1k и запуск БПЛА 3k с включенным на излучение ПРП 1k, питающимся от АКБ 2k, в результате чего БПЛА 3k с полезной нагрузкой под действием подъемной силы поднимается на заданную высоту полета Hпол в атмосферном слое 5.
7) В атмосферном слое 5 БПЛА 3k с ПРП 1k и АКБ 2k переносятся воздушными массами (ветром) в направлении подавляемого РЭС 7 и через время  будет доставлен в рабочую зону 6.
будет доставлен в рабочую зону 6.
8) Находясь в пределах рабочей зоны 6, ПРП 1k излучает вертикально вниз в пространство 10 помеховый радиосигнал, согласованный по амплитудно-частотным и структурно-временным характеристикам с параметрами подавляемого РЭС 7. При этом обеспечивается выполнение условия нахождения приемного устройства подавляемого РЭС 7 в зоне энергетической доступности передатчика радиопомех 1k, чем обеспечивается энергетическое подавление РЭС 7.
9) Через интервал  после запуска предыдущего БПЛА 3k с ПРП 1k и АКБ 2k оператор стартовой установки 4 повторно выполняет операции по пп. 4-6 и осуществляет запуск очередного БПЛА 3k+1 с ПРП 1k+1 и АКБ 2k+1.
после запуска предыдущего БПЛА 3k с ПРП 1k и АКБ 2k оператор стартовой установки 4 повторно выполняет операции по пп. 4-6 и осуществляет запуск очередного БПЛА 3k+1 с ПРП 1k+1 и АКБ 2k+1.
10) Операции по п. 9 выполняются до тех пор, пока не будут запущены все K БПЛА 3k с ПРП 1k и АКБ 2k из запускаемой серии, обеспечивающие непрерывное радиоэлектронное подавление РЭС 7 систем спутниковой радиосвязи и радионавигации в течении заданного времени TРП.
Таким образом, предлагаемый способ доставки передатчиков радиопомех приемным устройствам наземных радиоэлектронных средств спутниковых систем радиосвязи и радионавигации обеспечивает снижение сложности оборудования, и, соответственно, стоимости беспилотных летательных аппаратов - носителей передатчиков радиопомех за счет применения неуправляемых БПЛА в виде свободных аэростатов (воздушных шаров).
При этом обеспечивается повышение эффективности радиоэлектронного подавления наземных РЭС спутниковых систем радиосвязи и радионавигации автономными передатчиками радиопомех за счет обеспечения прямой радиовидимости между передатчиком радиопомех и подавляемым РЭС в течении всего времени, пока один из передатчиков радиопомех находится в рабочей зоне, за счет воздействия помеховым радиосигналом, излучаемым по основному лепестку диаграммы направленности передатчика радиопомех, на подавляемое РЭС по основному или первым боковым лепесткам диаграммы направленности приемной антенны подавляемого РЭС, а также за счет снижения влияния земли на распространение помеховых радиосигналов.
Источники информации
1 Патент № 2625206. Российская Федерация, МПК F41H 13/00 (2006.01). Способ доставки постановщиков помех и беспилотный робототехнический комплекс радиоэлектронной борьбы № 2016117518 : заявл. 04.05.2016 : опубл. 12.07.2017 / Араамов А.В., Виноградов Ю.А., Воронин Н.Н., Золотов А.В., Смирнов П.Л., Хохленко Ю.Л., Шепилов А.М.; заявитель ООО «Специальный Технологический Центр». - 15 с. : ил. - Текст : непосредственный.
2. Атмосфера стандартная. Параметры. ГОСТ 4401-81. ИПК Издательство стандартов: Москва. 2004.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ комплексного применения роботизированных средств огневого поражения и радиоэлектронного подавления системы активной защиты бронетехники | 2020 |
|
RU2746772C1 |
| СПОСОБ ДОСТАВКИ ПОСТАНОВЩИКА РАДИОПОМЕХ | 2008 |
|
RU2361233C1 |
| КОМПЛЕКС ФОРМИРОВАНИЯ СИГНАЛЬНО-ПОМЕХОВОЙ ОБСТАНОВКИ | 2016 |
|
RU2626384C1 |
| Способ наземной и воздушной доставки постановщиков радиопомех с использованием мобильного робототехнического комплекса радиоэлектронной борьбы | 2016 |
|
RU2652914C1 |
| Интегрированный комплекс бортового оборудования беспилотного летательного аппарата | 2023 |
|
RU2809930C1 |
| СПОСОБ ДОСТАВКИ ЗАБРАСЫВАЕМОГО ПЕРЕДАТЧИКА РАДИОПОМЕХ | 2020 |
|
RU2751548C1 |
| Пространственно-распределенная система радиопомех на беспилотных летательных аппаратах | 2023 |
|
RU2807312C1 |
| Малогабаритная радиостанция передачи команд управления беспилотным летательным аппаратом | 2021 |
|
RU2767605C1 |
| Способ доставки постановщиков помех и беспилотный робототехнический комплекс радиоэлектронной борьбы | 2016 |
|
RU2625206C1 |
| СПОСОБ ДОСТАВКИ ИСТОЧНИКА РАДИОПОМЕХ | 2015 |
|
RU2591047C1 |
Изобретение относится к способу доставки передатчиков радиопомех (ПРП) приемным устройствам наземных радиоэлектронных средств (РЭС) спутниковых систем радиосвязи и радионавигации. Для доставки в качестве носителя используют беспилотный летательный аппарат (БПЛА) в виде неуправляемого аэростата (воздушного шара), наполненный газом и запускаемый со стартовой установки. Для этого рассчитывают определенным образом: координаты точки местоположения, в которой необходимо разместить стартовую установку для обеспечения доставки БПЛА с ПРП; значение временного интервала между последовательными запусками БПЛА с ПРП и АКБ, обеспечивающее непрерывное помеховое воздействие на подавляемое РЭС, а также общее количество последовательно запускаемых БПЛА, необходимое для обеспечения заданной продолжительности радиоэлектронного подавления РЭС. Далее обеспечивают размещение стартовой установки, подготовку и запуск необходимого количества БПЛА под управлением оператора стартовой установки на основании рассчитанных данных. Обеспечивается повышение эффективности радиоэлектронного подавления наземных РЭС спутниковых систем радиосвязи и радионавигации автономными передатчиками радиопомех, доставляемыми в рабочую зону с помощью беспилотных летательных аппаратов. 3 ил.
Способ доставки передатчиков радиопомех (ПРП) приемным устройствам наземных радиоэлектронных средств (РЭС) спутниковых систем радиосвязи и радионавигации, заключающийся в том, что для их доставки используют носитель на беспилотном летательном аппарате (БПЛА), отличающийся тем, что в качестве БПЛА используется неуправляемый свободный аэростат (воздушный шар), наполненный газом, запускаемый со стартовой установки, для чего:
- на основании известных координат подавляемого РЭС в системе координат XOY, где ось OY направлена на Север, а ось OХ направлена на Восток, известных значений метеорологического направления ветра  , которое отсчитывается по часовой стрелке от направления на Север до направления, откуда дует ветер, и модуля скорости ветра U, а также заданного времени
, которое отсчитывается по часовой стрелке от направления на Север до направления, откуда дует ветер, и модуля скорости ветра U, а также заданного времени  доставки ПРП и аккумуляторной батареи (АКБ) в рабочую зону рассчитываются координаты точки местоположения, в которой необходимо разместить стартовую установку для обеспечения доставки БПЛА с ПРП и АКБ в рабочую зону радиоэлектронного подавления РЭС;
доставки ПРП и аккумуляторной батареи (АКБ) в рабочую зону рассчитываются координаты точки местоположения, в которой необходимо разместить стартовую установку для обеспечения доставки БПЛА с ПРП и АКБ в рабочую зону радиоэлектронного подавления РЭС;
- на основании известной ширины диаграммы направленности приемной антенны подавляемого РЭС, известного значения модуля скорости ветра U и заданного значения высоты полета БПЛА с ПРП и АКБ рассчитывается значение временного интервала  между последовательными запусками БПЛА с ПРП и АКБ, обеспечивающее непрерывное помеховое воздействие на подавляемое РЭС, а также общее количество последовательно запускаемых БПЛА с ПРП и АКБ, необходимое для обеспечения заданной продолжительности радиоэлектронного подавления РЭС TРП;
между последовательными запусками БПЛА с ПРП и АКБ, обеспечивающее непрерывное помеховое воздействие на подавляемое РЭС, а также общее количество последовательно запускаемых БПЛА с ПРП и АКБ, необходимое для обеспечения заданной продолжительности радиоэлектронного подавления РЭС TРП;
- стартовая установка размещается на земной поверхности в точке с рассчитанными координатами;
- оператор стартовой установки устанавливает ПРП и АКБ на БПЛА так, чтобы диаграмма направленности передающей антенны ПРП была направлена вертикально вниз;
- оператор стартовой установки заполняет БПЛА газом, плотность которого  намного меньше плотности воздуха
намного меньше плотности воздуха  , при этом объем БПЛА, требуемый для создания подъемной силы, необходимой для поднятия БПЛА с ПРП и АКБ на заданную высоту полета, рассчитывается заранее, исходя из массы полезной нагрузки
, при этом объем БПЛА, требуемый для создания подъемной силы, необходимой для поднятия БПЛА с ПРП и АКБ на заданную высоту полета, рассчитывается заранее, исходя из массы полезной нагрузки  , состоящей из совокупности ПРП и АКБ, и заданной высоты полета, а контроль достижения необходимого объема БПЛА осуществляется по достижению требуемой величины диаметра БПЛА;
, состоящей из совокупности ПРП и АКБ, и заданной высоты полета, а контроль достижения необходимого объема БПЛА осуществляется по достижению требуемой величины диаметра БПЛА;
- осуществляется включение ПРП и запуск БПЛА с включенным на излучение ПРП, питающимся от АКБ, в результате чего БПЛА с полезной нагрузкой под действием подъемной силы поднимается на заданную высоту полета в атмосферном слое, где переносится воздушными массами в направлении подавляемого РЭС и через время будет доставлен в рабочую зону;
- находясь в пределах рабочей зоны, ПРП излучает вертикально вниз в пространство радиоподавления помеховый радиосигнал, согласованный по амплитудно-частотным и структурно-временным характеристикам с параметрами подавляемого РЭС, при этом обеспечивается выполнение условия нахождения приемного устройства подавляемого РЭС в зоне энергетической доступности передатчика радиопомех, чем обеспечивается энергетическое подавление РЭС;
- через интервал после запуска предыдущего БПЛА с ПРП и АКБ оператор стартовой установки повторно выполняет вышеперечисленные операции по подготовке БПЛА с ПРП и АКБ и осуществляет запуск очередного БПЛА с ПРП и АКБ;
- операции по подготовке и запуску БПЛА с ПРП и АКБ выполняются до тех пор, пока не будут запущены все БПЛА с ПРП и АКБ из запускаемой серии, обеспечивающие непрерывное радиоэлектронное подавление РЭС систем спутниковой радиосвязи и радионавигации в течение заданного времени TРП.
| US 20200062392 A1, 27.02.2020 | |||
| US 20180257780 A1, 13.09.2018 | |||
| EP 3143663 A1, 22.03.2017 | |||
| JP WO2018135522 A1, 07.11.2019 | |||
| Приспособление к ткацким станкам с введением утка с помощью зацепок для направления стержней зацепок | 1928 |
|
SU11675A1 |

