Предложенное на рассмотрение изобретение относится к способу и устройству для создания 3D-модели компонентов несущей структуры эскалатора или траволатора и для измерения компонентов структуры, которые могут быть осуществлены, в частности, в рамках модернизации эскалатора или траволатора.
Передвижные устройства в форме эскалаторов или траволаторов используются зачастую внутри зданий для того, чтобы иметь возможность перемещать пассажиров между двумя определёнными пунктами. У эскалаторов, которые иногда обозначаются также как роликовые лестницы, оба пункта располагаются при этом на различных уровнях, и пассажиры перемещаются вдоль пути движения с сильным наклоном, в то время как у траволаторов оба пункта располагаются на одном и том же уровне или на лишь незначительно различающихся уровнях, и перемещение пассажиров осуществляется на том же уровне или вдоль пути движения лишь с незначительным наклоном. Также эскалаторы и траволаторы обозначаются также общим термином «передвижные устройства».
Передвижное устройство имеет, в целом, транспортёр с несколькими, выполненными с возможностью перемещения вдоль имеющего круговую траекторию пути движения, подножками. Подножки при этом, по меньшей мере, в так называемой зоне транспортировки доступны извне, так что пассажиры, к примеру, выходя из входной зоны могут попасть на одну из подножек в зоне транспортировки, затем могут быть перемещены вдоль пути движения и в конце могут снова выйти в противоположной зоне выхода. Зона транспортировки обозначается иногда также как предварительная зона транспортёра, причём перемещающийся по круговой траектории транспортёр проходит обратно в зоне обратного хода под предварительной зоной и при этом, естественно, пассажиры не могут попасть на него. У эскалаторов подножки обозначаются зачастую как ступени, у траволаторов подножки обозначаются, как правило, как палеты. Подножки расположены, в основном, вдоль пути движения друг за другом и, соответственно, закреплены, по меньшей мере, на цепи или на полотне, чтобы таким образом сформировать полотно из ступеней или полотно из палет. Образованный посредством полотна из ступеней или полотна из палет транспортёр может пониматься, таким образом, как та часть транспортёра, которая выполнена с возможностью перемещения относительно стационарной части передвижного устройства. В соответствии со стандартом передвижное устройство имеет также движущиеся по круговой траектории поручни перил, которые обрамляют полотно из ступеней или полотно из палет по продольной стороне. За них пользователи могут держаться, так как движущиеся по круговой траектории поручни перил также могут быть частью транспортёра.
В дополнение к транспортёру передвижное устройство имеет несущую структуру, при помощи которой передвижное устройство может быть закреплено внутри здания и через которую вес передвижного устройства переносится на здание. Несущая структура осуществлена при этом зачастую в виде каркасной конструкции. Такая каркасная конструкция составлена из большого количества компонентов структуры. Такими компонентами структуры могут быть, среди прочего, поперечные распорки, продольные распорки, диагональные распорки, переходные конструктивные элементы и проч. Каркасная конструкция осуществлена и расположена при этом таким образом, что, с одной стороны, может монтироваться на несущие структуры здания, а, с другой стороны, компоненты транспортёра могут монтироваться в каркасную конструкцию и на неё. Геометрический и структурный вариант осуществления образованной посредством каркасной конструкции несущей структуры передвижного устройства должен учитывать, таким образом, как геометрические и структурные граничные условия внутри здания, в котором установлена конструкция, так и соответствующие данные других компонентов передвижного устройства, в частности, транспортёра.
По истечении определённого срока эксплуатации может быть необходима модернизация эскалатора или траволатора. При этом, к примеру, изношенные компоненты передвижного устройства могут быть заменены. В альтернативном варианте или в дополнение компоненты передвижного устройства могут быть заменены соответствующими более современными компонентами, для улучшения, к примеру, производительности, комфортности и/или долговечности исходного передвижного устройства.
В варианте, альтернативном модернизации имеющегося передвижного устройства, передвижное устройство могло бы быть заменено полностью. При этом это могло бы обойтись дешевле, если бы заменяющее подающее устройство изготавливали стандартным способом на заводе, вместо того, чтобы производить модернизацию имеющегося подающего устройства. Разумеется, могли бы иметь место дополнительные затраты и расходы для транспортировки заменяющего подающего устройства к месту эксплуатации. В частности, имели бы место существенные затраты в случае установки заменяющего подающего устройства в виде очень большого конструктивного элемента в уже существующее здание, так как при этом зачастую стены здания и/или другие препятствия должны бы были быть, по меньшей мере, частично устранены.
В рамках модернизации передвижного устройства обычно имеющаяся несущая структура передвижного устройства, в частности, имеющаяся каркасная конструкция, сначала освобождается, т.е., в частности, компоненты передвижного устройства, которые должны быть модернизированы, удаляются. В частности, некоторые или все компоненты транспортёра, т.е., к примеру, полотно из ступеней или из палет и/или приводной и направляющий блоки, удаляются. Затем оставшаяся несущая структура передвижного устройства подготавливается для установки на ней новых компонентов, т.е., в частности, очищается и возможно снабжается подходящими переходными пластинами или переходными модулями, чтобы затем иметь возможность смонтировать на несущей структуре новые компоненты.
WO 2004/035452 А1 описывает способ модернизации имеющегося эскалатора. ЕР 16175491.6 также описывает способ модернизации имеющегося эскалатора или имеющегося траволатора.
Традиционно при модернизации имеющегося передвижного устройства после удаления заменяемых компонентов сначала оставшаяся каркасная структура точно измеряется, чтобы затем она могла быть, к примеру, при помощи переходных пластин и переходных модулей, приведена в соответствие с устанавливаемыми на неё заменяемыми компонентами. Такое измерение производится при этом традиционно специализированным персоналом, который, к примеру, хорошо знает как заменяемые компоненты и требования по монтажу, так и то, какие замеры оставшейся несущей каркасной структуры должны быть произведены, чтобы иметь возможность с достаточной точностью подготовить дальнейшее согласование заменяемых компонентов, а также возможное конструирование или согласование переходных пластин и переходных модулей. Такое измерение, ввиду необходимой проверки персонала, а также ввиду необходимости осмотра и измерения передвижного устройства специалистом по месту, было не только дорого, но и затратно по времени.
Среди прочего, может иметь место необходимость в способе и, соответственно, в устройстве, при помощи которых, в частности, в рамках модернизационных мероприятий, можно измерить несущую структуру эскалатора или траволатора, в плане компонентов структуры, с небольшими затратами на персонал и/или с небольшими финансовыми затратами. В особенности, может иметь место необходимость в способе и, соответственно, в устройстве, посредством которых компоненты несущей структуры передвижного устройства могут быть измерены без привлечения для этого квалифицированного персонала в место нахождения передвижного устройства.
Такая потребность может быть удовлетворена посредством способа и, соответственно, устройства по любому из независимых пунктов формулы изобретения. Предпочтительные варианты осуществления определены в зависимых пунктах формулы изобретения, а также в последующем описании.
В соответствии с первым аспектом изобретения предлагается способ создания 3D-модели компонентов несущей структуры эскалатора или траволатора. Эскалатор или траволатор имеет при этом транспортёр с несколькими выполненными с возможностью перемещения вдоль имеющего круговую траекторию пути движения подножками, причём подножки расположены вдоль пути движения друг за другом. Способ имеет следующие этапы: а) фиксация записывающего изображение устройства на транспортёре, b) удаление, по меньшей мере, одной из подножек, чтобы открыть визуальный доступ к расположенным ниже, предназначенным для измерения, компонентам структуры, с) перед записью изображений посредством записывающего изображение устройства стационарное размещение, по меньшей мере, одной контрольной отметки на эскалаторе или на траволаторе, по меньшей мере, в одном месте по пути движения, причём контрольная отметка выполнена с возможностью однозначного распознавания для записывающего изображение устройства, d) перемещение транспортёра по круговой траектории вместе с зафиксированным на нём записывающим изображение устройством, по меньшей мере, по части пути движения, е) запись изображений предназначенных для измерения компонентов структуры посредством записывающего изображение устройства из нескольких положений вдоль пути движения, и f) создание 3D-модели, по меньшей мере, фрагментов компонентов несущей структуры, на базе записанных изображений и с помощью, по меньшей мере, одной совместно записанной контрольной отметки. Этапы могут быть осуществлены в заданном или в другом порядке. В частности, этап b) может осуществляться перед этапом а). Этапы (d), (e), (f) могут быть осуществлены друг за другом или одновременно.
Что касается данного описания, то признак «3D-модель» следует понимать как виртуальную 3D-модель. Точнее говоря, эта 3D-модель является максимально соответствующим масштабу трёхмерным воспроизведением записанной структуры в оцифрованной форме, причём отдельные точки 3D-модели в виртуальном пространстве определяются посредством координат в трёх измерениях и/или посредством координат вектора. Такие виртуальные 3D-модели могут быть включены, к примеру, в 3D-CAD-систему. 3D-CAD-система обеспечивает возможность измерения расстояний и положений поверхностей и кромок 3D-модели. В предпочтительном варианте устанавливаемые новые компоненты также сконструированы в 3D-CAD-системе. Они могут быть лишь виртуально вставлены в 3D-модель и дополнительно позиционированы, так что переходные конструктивные элементы могут быть сконструированы непосредственно в виртуальном окружении 3D-модели. Эти переходные конструктивные элементы позволяют обеспечивать стабильное, надёжное и точно позиционированное соединение старой имеющейся каркасной конструкции с новыми подсоединяемыми компонентами.
В соответствии со вторым аспектом изобретения предлагается способ измерения компонентов несущей структуры эскалатора или траволатора. Способ включает в себя создание 3D-модели компонентов несущей структуры посредством способа в соответствии с вариантом осуществления первого аспекта изобретения и измерение компонентов структуры на основании 3D-модели.
В соответствии с третьим аспектом изобретения предлагается способ модернизации эскалатора или траволатора. Способ имеет следующие этапы: i) определение габаритов внутри несущей структуры эскалатора или траволатора посредством измерения компонентов несущей структуры при помощи способа в соответствии с вариантом осуществления второго аспекта изобретения, ii) удаление закреплённых на несущей структуре старых компонентов эскалатора или траволатора, и iii) установка новых компонентов эскалатора или траволатора на несущей структуре, причём позиционирование новых компонентов на несущей структуре осуществляется с учётом ранее определённых габаритов внутри несущей структуры.
В соответствии с четвёртым аспектом изобретения предлагается устройство для создания 3D-модели компонентов несущей структуры эскалатора или траволатора. Эскалатор или траволатор осуществлены при этом одинаковыми или соответствующим образом, как пояснено выше в отношении первого аспекта изобретения. Устройство имеет записывающее изображение устройство, фиксирующее устройство и вычислительное устройство. Записывающее изображение устройство настроено на то, чтобы записывать изображения предназначенных для измерения компонентов структуры. Фиксирующее устройство настроено на то, чтобы фиксировать записывающее изображение устройство на транспортёре. Вычислительное устройство настроено на то, чтобы создавать 3D-модель, по меньшей мере, фрагментов компонентов несущей структуры, на базе записанных посредством записывающего изображение устройства изображений. Устройство может быть, таким образом, специально конфигурировано для того, чтобы осуществлять способ в соответствии с вариантом осуществления первого или второго аспектов изобретения или быть использованным при таком способе.
Возможные признаки и преимущества вариантов осуществления изобретения могут, среди прочего и без ограничения изобретения, рассматриваться как основанные на описываемых далее идеях и научных сведениях.
Как замечено во вступлении, в рамках традиционных модернизационных мероприятий оставшиеся компоненты несущей структуры передвижного устройства должны были ранее измеряться дорогостоящим образом посредством специального персонала, чтобы затем соответствующим образом подготовить заменяющие компоненты транспортёра и иметь возможность согласовать их с оставшейся несущей структурой.
Посредством предложенного здесь способа или с применением предложенного здесь устройства измерение несущей структуры передвижного устройства может быть значительно упрощено и/или частично автоматизировано.
Кратко резюмируя, предлагается создать 3D-модель, т.е. максимально соответствующее масштабу трёхмерное воспроизведение, в частности, в оцифрованной форме, компонентов несущей структуры передвижного устройства при помощи записывающего изображение устройства, чтобы затем иметь возможность измерить эту модель. Изображения записываются при этом посредством зафиксированного на транспортёре передвижного устройства записывающего изображение устройства. В частности, записывается несколько изображений, причём положения, из которых были записаны изображения, должны отличаться друг от друга. Для этого зафиксированное на транспортёре записывающее изображение устройство перемещается, по меньшей мере, частично по пути движения транспортёра. Для этой цели транспортёр перемещается по круговой траектории и посредством записывающего изображение устройства в различных положениях вдоль пути движения, соответственно, записывается изображение. Из большого количества записанных под различными углами обзора изображений затем может быть сформирована нужная 3D-модель.
В рамках предложенного способа записывающее изображение устройство может различными способами фиксироваться на транспортёре передвижного устройства. К примеру, записывающее изображение устройство может быть закреплено на одной из подножек, т.е. на ступени или на палете. Для этого может быть использовано специально осуществлённое соединительное устройство, которое, с одной стороны, подходящим образом взаимодействует с записывающим изображение устройством, т.е., к примеру, может фиксироваться на одной стойке записывающего изображение устройства, и которое, с другой стороны, взаимодействует с подножкой, т.е. к примеру, может фиксироваться в пазах подножки. В альтернативном варианте или в дополнение записывающее изображение устройство может быть зафиксировано на других компонентах транспортёра. К примеру, может быть предусмотрена фиксация на полотне из ступеней или на полотне их палет. В частности, фиксирование может быть предусмотрено на тяговой цепи и/или на соединительных осях внутри полотна из ступеней или полотна из палет и, в случае необходимости, используется специально согласованное для этого соединительное устройство. Однако, возможно также закреплять записывающее изображение устройство на одном из расположенных с возможностью перемещения по круговой траектории поручней перил или на обоих поручнях перил.
Посредством фиксации записывающего изображение устройства на транспортёре записывающее изображение устройство может быть стационарно зафиксировано относительно транспортёра, т.е. направление обзора записывающего изображение устройства изменяется лишь тогда, когда транспортёр перемещается и ориентация обзора записывающего изображение устройства изменяется лишь тогда, когда должно быть изменено направление перемещения транспортёра относительно его ориентации. Такое жёсткое фиксирование записывающего изображение устройства на транспортёре может быть реализовано простым способом. В частности, записывающее изображение устройство само не должно активно изменять направление своего обзора и/или ориентацию обзора, а может быть достаточно перемещения статичного записывающего изображение устройства лишь при помощи транспортёра вдоль фрагментов пути движения передвижного устройства. Жёсткое закрепление записывающего изображение устройства на транспортёре может также упростить процесс оценки или дальнейшей обработки изображений, записанных при помощи записывающего изображение устройства.
Посредством постепенного перемещения вдоль пути движения записывающее изображение устройство может записывать изображения различных частей несущей структуры передвижного устройства. Так как, по меньшей мере, часть этой несущей структуры и её предназначенных для измерения компонентов расположены ниже подножек транспортёра, то сначала периодически удаляются, по меньшей мере, одна из подножек, предпочтительно две или три подножки, для получения визуального доступа к расположенным ниже, предназначенным для измерения компонентам структуры. Подножки могут быть удалены сравнительно просто и без использования специального персонала. Через образованное таким способом отверстие внутри транспортёра записывающее изображение устройство может записывать изображения расположенных ниже компонентов структуры.
Когда транспортёр вместе как с зафиксированным на нём записывающим изображение устройством, так и с образованным в нём отверстием, постепенно перемещается вдоль пути движения передвижного устройства, то изображения могут записываться из различных положений и, таким образом, в различных направлениях обзора. При этом должны быть отображены не обязательно все компоненты структуры или полностью на изображении должны быть записаны не все компоненты структуры, а может быть достаточно учесть в 3D-модели, к примеру, лишь необходимые для модернизации передвижного устройства зоны несущей структуры. При этом может быть достаточно также перемещать записывающее изображение устройство лишь по части пути движения транспортёра. Однако, в качестве предпочтительного может быть принято перемещение записывающего изображение устройства вдоль, в основном, всей области пути перемещения.
В соответствии с вариантом осуществления предлагается использовать в качестве записывающего изображение устройства 3D записывающее изображение устройство, которое рассчитано на запись трёхмерных изображений.
Иными словами, записывающее изображение устройство может быть осуществлено для того, чтобы не только лишь записывать 2-мерную проекцию своего поля обзора, но и, в частности, в рамках предложенного здесь способа преобразовывать своё поле обзора в трёхмерное. Записанные трёхмерные изображения содержат при этом информацию как о продольных зазорах между деталями, так и информацию о глубине в пространстве, т.е. о расстоянии до записывающего изображение устройства. В предпочтительном варианте 3D записывающее изображение устройство при этом в состоянии записывать трёхмерные изображения точно в соответствии с масштабом. Из записанных в различных положениях вдоль пути движения трёхмерных изображений затем достаточно простым способом может быть сформирована 3D-модель.
Записывающим изображение устройством может быть, к примеру, лазерный сканер. Такой лазерный сканер испускает при этом лазерный луч и растрирует (т.е. сканирует) им постепенно посредством своего поля обзора. При этом определяются отражающиеся обратно части лазерного луча и на основании этого создаётся изображение окружающего пространства внутри поля обзора. В случае 3D лазерного сканера дополнительно определяется информация о зазорах между деталями внутри поля обзора относительно лазерного сканера. Для этого, к примеру, может быть измерено время распространения выпущенного лазерного луча до момента определения обратно отражённых частей.
В альтернативном варианте записывающее изображение устройство может быть осуществлено в виде камеры. Такая камера может одновременно записывать изображение окружающего её пространства в своём общем поле обзора. 3D-камера может формировать при этом изображения, у которых для каждой записанной поверхности определяется также информация о её расстоянии до камеры. Для этого, среди прочего, могут использоваться измерения времени распространения. Поэтому такие камеры обозначатся иногда также как времяпролётные камеры (Time-Of-Flight).
Следует указать на то, что предпочтительным было бы формировать нужную 3D-модель из 3D-изображений, т.е. используемое в качестве записывающего изображение устройства 3D записывающее изображение устройство используется как 3D лазерный сканер или времяпролётная камера. В принципе, рассматривается также в качестве возможного варианта создание 3D-модели из 2D-изображений, которые записаны в различных направлениях обзора, т.е. из различных положений. При этом 3D-модель может быть определена на основании 2D-изображений, к примеру, посредством стереоскопической техники.
Полученная вышеописанными способами 3D-модель может быть затем использована для измерения изображённых там компонентов несущей структуры. Для этого 3D-модель может быть сформирована и/или обработана, к примеру, в CAD-системе (Computer Aided Design).
Измерение 3D-модели может быть осуществлено при этом в предпочтительном варианте в месте, удалённом от направления движения. Это может иметь преимущество в том, что специализирующийся на измерении 3D-модели дорогостоящий персонал не должен самостоятельно добираться до места расположения передвижного устройства.
Иными словами, может быть достаточно того, что на месте расположения передвижного устройства не подготовленный специальным образом вспомогательный персонал временно удалит одну из подножек в передвижном устройстве и зафиксирует записывающее изображение устройство, к примеру, на соседней с образовавшимся, вследствие этого, отверстием подножке и затем осуществит перемещение, при котором транспортёр передвижного устройства кратковременно будет перемещён и, вследствие этого, зафиксированное на нём записывающее изображение устройство сможет записать изображения из различных положений. Для осуществления таких действий вспомогательному персоналу необходимы лишь незначительные технические знания. В частности, вспомогательному персоналу не нужны какие-либо специальные знания о процессе измерения существующих передвижных устройств. Полученные при помощи записывающего изображение устройства изображения или образованная на основании этого 3D-модель может быть затем, к примеру, через информационную сеть передана на CAD-систему техника-топографа. При этом данному специалисту нет необходимости самостоятельно осматривать передвижное устройство на месте, а он может с достаточной точностью измерить компоненты несущей структуры передвижного устройства лишь на основании полученной 3D-модели.
Как далее упомянуто выше, перед записью изображений стационарно на эскалатор или на траволатор в месте на пути движения наносится выполненная с возможностью однозначного распознавания для записывающего изображение устройства контрольная отметка или стационарно на эскалатор или на траволатор в различных местах вдоль пути движения наносится несколько выполненных с возможностью однозначного распознавания для записывающего изображение устройства контрольных отметок.
Иными словами, передвижное устройство перед началом записи изображений, посредством установки одной или нескольких контрольных отметок, подготавливается соответствующим образом, чтобы, к примеру, затем на основании записанных изображений иметь возможность проще и/или точнее сформировать нужную 3D-модель и/или, чтобы иметь возможность лучше её оценить. При создании 3D-модели контрольные отметки могут быть использованы затем, к примеру, в качестве ориентира, для задания масштаба и проч.
В качестве контрольных отметок могут быть использованы, к примеру, самоклеящиеся или легко закрепляемые маркеры. Контрольные отметки могут быть снабжены изображениями, баркодами и проч. Изображения или баркоды могут быть осуществлены у различных контрольных отметок различным образом, так что они могут отличаться друг от друга. Контрольные отметки могут быть осуществлены также в виде центрирующих меток, т.е., к примеру, аналогично мишени.
Контрольные отметки могут быть установлены в заданных положениях вдоль передвижного устройства. В альтернативном варианте контрольные отметки могут быть установлены в любых положениях на передвижном устройстве. В частности, контрольные отметки могут быть установлены на частях балюстрады и/или на предназначенных для измерения компонентах структуры.
Положения контрольных отметок относительно друг друга могут быть при необходимости точно измерены. При этом это может зависеть только от положения или от расстояния контрольных отметок относительно друг друга, абсолютное позиционирование контрольных отметок на передвижном устройстве может иметь несущественное значение или может вообще не иметь никакого значения.
В соответствии с вариантом осуществления изобретения при создании 3D-модели несколько изображений, с учётом записанных на изображениях контрольных отметок, могут монтироваться в общее изображение.
Иными словами, предварительно установленные на передвижном устройстве контрольные отметки используются для того, чтобы иметь возможность собрать затем несколько отдельных записанных изображений в общее изображение, чтобы затем сформировать из него 3D-модель. Предпочтительным может являться расположение контрольных отметок на передвижном устройстве вдоль пути движения и/или запись изображений вдоль пути движения в соответствующих положениях таким образом, чтобы на каждом записанном изображении были записаны, по меньшей мере, одна, предпочтительно, по меньшей мере, две контрольные отметки. В частности, когда контрольные отметки осуществлены, соответственно, различными, и, тем самым, с возможностью отличия друг от друга, то на основании записанных на изображениях контрольных отметок можно однозначно определить, в каком положении было записано изображение и как оно может быть смонтировано с другими изображениями.
В соответствии с вариантом осуществления изобретения при создании 3D-модели искажения на изображениях могут быть скорректированы на основании записанных вместе на изображениях контрольных отметок.
По аналогии с вышеописанным вариантом осуществления контрольные отметки могли бы быть, таким образом, снова использованы для того, чтобы иметь возможность создать нужную 3D-модель. При этом, с учётом установленных в предварительно известных положениях и/или с предварительно заданными зазорами относительно друг друга контрольных отметок, можно определить имеют ли место искажения на изображениях, к примеру, обусловленные оптическими ошибками записывающего изображение устройства. В частности, может быть важно на основании записанных изображений иметь возможность сделать вывод о фактических габаритах и геометрии записанных компонентов структуры и при этом иметь возможность различать виртуальные ошибки при записи в форме искажений от реальной геометрии компонентов структуры. К примеру, компоненты структуры, которые изначально были образованы зачастую в форме прямых распорок или балок, со временем могут деформироваться или изгибаться. На записанных изображениях можно видеть тогда изогнутые компоненты структуры. Разумеется, компоненты структуры могут и далее сохранять прямую форму и лишь вследствие оптических искажений получать на изображениях изогнутую форму. При помощи предварительно установленных контрольных отметок виртуальные искажения можно отличать от реальных изгибов. Такие искажения могут быть затем соответствующим образом расcчитаны и, тем самым, точность или соответствие масштабу созданной 3D-модели могут быть улучшены.
В качестве следующего возможного варианта осуществления изобретения созданная 3D-модель, на основании записанных на изображении контрольных отметок, может быть откалибрована.
Иными словами, установленные в предварительно заданных или точно измеренных положениях контрольные отметки могут использоваться для того, чтобы откалибровывать созданную 3D-модель. В откалиброванной таким образом 3D-модели, в частности, габариты компонентов структуры или расстояния между компонентами структуры можно воспроизводить в соответствии с масштабом, так что при помощи 3D-модели такие габариты или расстояния могут быть точно измерены.
В соответствии с вариантом осуществления изображения могут записываться во время непрерывного перемещения транспортёра.
Иными словами, транспортёр может таким образом непрерывно перемещаться по круговой траектории, что вместе с ним зафиксированное на нём записывающее изображение устройство непрерывно перемещается, к примеру, из одного крайнего положения во второе крайнее положение, т.е, к примеру, от начала зоны транспортировки к концу зоны транспортировки. На пути перемещения между двумя крайними положениями записывающее изображение устройство может записать тогда несколько изображений из различных положений. Транспортёр не должен быть для этого непременным образом остановлен, так что время перемещения может быть небольшим и/или регулировка передвижного устройства может быть осуществлена простым способом.
В альтернативном варианте в соответствии с вариантом осуществления перемещение транспортёра во время записи изображений может эпизодически прерываться.
Иными словами, записывающее изображение устройство может снова перемещаться посредством транспортёра из одного положения во второе положение. При этом процесс перемещения может быть, однако, один или несколько раз кратковременно прерван, т.е. транспортёр кратковременно останавливается, так что записывающее изображение устройство во время остановки может записывать изображения. Качество изображения может быть, в целом, улучшено за счёт того, что, к примеру, не происходит расфокусоровки, вследствие дрожания или тряски записывающего изображение устройства.
В соответствии с вариантом осуществления записывающее изображение устройство может обмениваться сигналами с системой управления эскалатора или траволатора, для координации записи изображений с перемещением транспортёра.
Иными словами, записывающее изображение устройство и система управления передвижного устройства могут взаимодействовать таким образом, что записывающее изображение устройство, к примеру, в зависимости от актуального состояния перемещения транспортёра, скоординированным образом может записывать изображения. К примеру, записывающее изображение устройство, на основании полученных от системы управления передвижного устройства сигналов, может распознавать, когда оно достигнет определённого положения и может тогда из этого положения записать изображение. В альтернативном варианте или в дополнение записывающее изображение устройство посредством передачи сигнала может побуждать систему управления передвижного устройства к тому, чтобы кратковременно остановиться для обеспечения возможности записи изображений. Записывающее изображение устройство и система управления передвижного устройства могут взаимодействовать друг с другом различным образом, к примеру, через сооружаемое заранее кабельное соединение или в альтернативном варианте, к примеру, по беспроводной радиосвязи.
В соответствии с вариантом осуществления записывающее изображение устройство может быть настроено на то, чтобы распознавать конец зоны транспортировки и, на основании этого, сигнализировать системе управления эскалатора или траволатора об окончании перемещения транспортёра.
Иными словами, записывающее изображение устройство может, к примеру, на основании записанных им изображений, узнать, когда оно приблизится к концу зоны транспортировки. Находящееся во взаимодействии с системой управления передвижного устройства записывающее изображение устройство может на основании этого предписать системе управления остановить передвижное устройство.
Процесс записи изображений может быть запущен, таким образом, к примеру, одним человеком, как только записывающее изображение устройство будет корректно зафиксировано на транспортёре, и одновременно или последовательно может быть соответствующим образом запущена система управления транспортёра, для перемещения записывающего изображение устройства вдоль пути перемещения. Когда записывающее изображение устройство достигает, к примеру, противоположного конца пути движения или зоны транспортировки, или приближается к ней, то записывающее изображение устройство может самостоятельно передать эту информацию на систему управления передвижного устройства и дать инструкции об остановке процесса передвижения. Затем записывающее изображение устройство может быть снова демонтировано с транспортёра. Весь способ в целом может быть, благодаря этому, упрощён. В частности, повреждения записывающего изображение устройства, вследствие столкновения с частями передвижного устройства, могут быть предотвращены.
Следует указать на то, что некоторые из возможных признаков и преимуществ изобретения описаны здесь со ссылкой на различные варианты осуществления. В частности, некоторые признаки описаны со ссылкой на способ в соответствии с изобретением, а другие признаки со ссылкой на устройство в соответствии с изобретением. Специалист понимает, что признаки могут быть соответствующим образом скомбинированы, согласованы или заменены, чтобы быть пригодными для других вариантов осуществления изобретения.
Затем описываются варианты осуществления изобретения со ссылкой на приложенные чертежи, причём ни чертежи, ни описание не следует рассматривать в качестве ограничения изобретения.
фиг.1 демонстрирует эскалатор с устройством для создания 3D-модели компонентов несущей структуры эскалатора в соответствии с вариантом осуществления предложенного на рассмотрение изобретения,
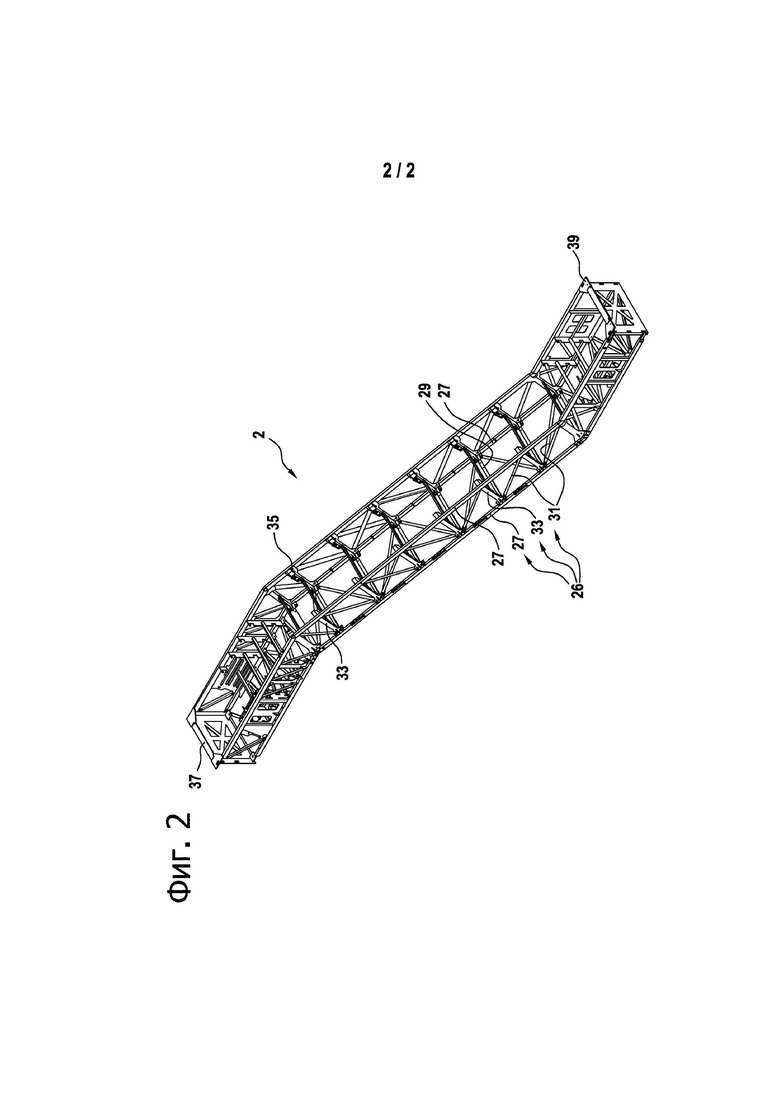
фиг.2 демонстрирует несущую структуру в форме каркасной конструкции для эскалатора.
Фигуры являются лишь схематичными и представлены не в масштабе. Одинаковые ссылочные позиции обозначают на различных фигурах одинаковые или одинаково функционирующие признаки.
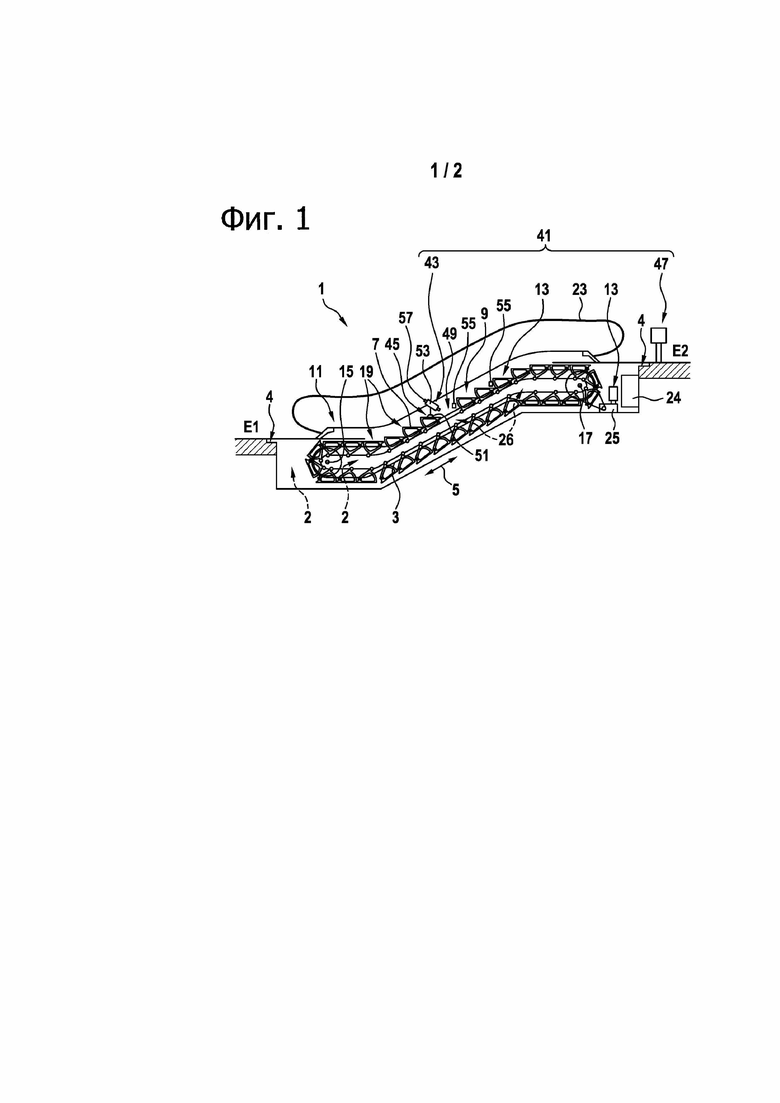
Фиг.1 демонстрирует вид сбоку представленного в качестве тримера эскалатора 1, при помощи которого пассажиры могут перемещаться, к примеру, между двумя уровнями Е1, Е2. Фиг.2 демонстрирует вид в перспективе несущей структуры 2 в форме каркасной конструкции для такого эскалатора 1. Представленная на фиг.2 несущая структура 2 может быть использована для того, чтобы, в частности, располагать в ней представленные на фиг.1 компоненты эскалатора 1, а также закреплять её внутри здания и переносить её вес на здание. Несущая структура 2 и её компоненты 26 представлены на фиг.2 лишь для пояснения, а на фиг.1 поясняются пунктирными стрелками лишь в плане их положения, детально, однако, не изображены, чтобы не нарушать наглядности фиг.1.
Эскалатор 1 имеет две кольцеобразно замкнутые тяговые цепи 3. Обе тяговые цепи 3 составлены из большого количества звеньев цепи. Обе тяговые цепи 3 могут перемещаться вдоль пути 5 движения в направлениях движения. Тяговые цепи 3 располагаются на большой ширине параллельно друг другу и при этом в направлении перпендикулярно направлению движения на расстоянии друг от друга. В концевых зонах, на границе с уровнями Е1, Е2, тяговые цепи 3 изменяют направления посредством направляющих роликов 15, 17.
Между двумя тяговыми цепями 3 располагается несколько подножек 7 в форме ступенек. Каждая подножка 7 при этом, вблизи своих боковых концов, закреплена, соответственно, на одной из тяговых цепей 3 и может, таким образом, при помощи тяговых цепей 3 перемещаться в направлениях движения вдоль пути 5 движения. Проведённые по тяговым цепям 3 подножки 7 образуют при этом транспортирующее полотно 9, у которого подножки 7 расположены вдоль пути 5 движения друг за другом и, по меньшей мере, в зоне 19 транспортировки пассажиры могут попасть на них. Чтобы иметь возможность переместить тяговые цепи 3, эскалатор 1 имеет приводное устройство 25 и осуществляющую им управление систему 24 управления, которые обозначены на фиг.1 лишь очень схематично. Транспортирующее полотно 9 образует вместе с приводным устройством 25 и направляющими роликами 15, 17 транспортёр 13, подножки 7 которого могут смещаться относительно стационарно жёстко закреплённой в здании структуры 2.
Несущая структура 2, с целью лучшей наглядности, представлена не на фиг.1, а отдельно на фиг.2. Несущая структура 2 осуществлена в виде каркасной конструкции, которая составлена из большого количества компонентов 26 структуры, таких как продольные распорки 27, поперечные распорки 29, диагональные распорки 31, стойки 33, навесные детали 35 и проч. Компоненты 26 структуры при этом в предпочтительном варианте неразъёмным образом соединены друг с другом, к примеру, посредством сварных, винтовых, клинчевых или клёпаных соединений. Несущая структура 2 в местах 37, 39 насаживания может закрепляться на соответствующих, способных выдерживать нагрузку частях 4 здания (см. фиг.1).
Различные компоненты транспортёра 13 соединены с несущей структурой 2 и защищены ею. Для этого компоненты транспортёра 13, к примеру, при помощи переходных пластин или нечто подобного могут быть закреплены на отдельных или на нескольких компонентах 26 структуры.
Эскалатор 1 имеет далее расположенный на балюстраде 11 поручень 23 перил, который приводится в действие, как правило, вместе с тяговыми цепями 3 и, таким образом, перемещается синхронно с транспортирующим полотном 9.
По прошествии определённого времени эксплуатации может быть осуществлена модернизация эскалатора 1, с целью выведения его на новейший технический уровень. При этом расходы превышают затраты на проведение обычных работ по ремонту и техническому обслуживанию, при которых производится замена лишь изношенных деталей. При модернизации нередко предохранительные элементы и электрическое оборудование должны быть также приведены в соответствие с новейшими требованиями и стандартами безопасности.
В то время, как в рамках мероприятий по модернизации традиционным образом заменяемые компоненты полностью удаляются и затем оставшиеся компоненты несущей структуры 2 должны быть точно измерены вручную, описывается в данном случае альтернативный способ с использованием устройства 41. Устройство 41 осуществлено при этом для создания 3D-модели структурных компонентов 26 несущей структуры 2 эскалатора 1, которая затем может быть использована для целей измерения.
Как схематично представлено на фиг.1, устройство 41 имеет передающее изображение устройство 43. Передающее изображение устройство 43 при помощи фиксирующего устройства 45 закреплено на транспортёре 13. Далее устройство 41 оснащено вычислительным устройством 47.
В рамках процесса модернизации персонал может сначала удалить один или несколько подножек 7 на модернизируемом эскалаторе 1. Для этого персоналу не требуется, как правило, никаких специальных знаний, так что эта работа может быть осуществлена, к примеру, и вспомогательным персоналом. В случае необходимости могут быть удалены и другие защитные элементы, к примеру, листы обшивки цоколя балюстрады. За счёт этого, освобождается отверстие 49 в транспортирующем полотне 9. Через это отверстие 49 открывается визуальный доступ к деталям расположенной ниже несущей структуры 2.
Затем передающее изображение устройство 43 фиксируется на транспортёре 1 при помощи его фиксирующего устройства 45. В частности, передающее изображение устройство 43 может быть зафиксировано на транспортёре 13 таким образом, что направление его обзора оказывается направленным на отверстие 49 и на расположенную ниже несущую структуру 2. Сначала передающее изображение устройство 43 может быть расположено, к примеру, вблизи одного конца зоны 19 транспортировки, к примеру, вблизи доступа на нижний уровень Е1.
В представленном примере фиксирующее устройство 45 осуществлено в виде стойки 51, которая, с одной стороны, удерживает на себе передающее изображение устройство 43, а, с другой стороны, закреплена на одной из подножек 7. Стойка 51 может входить при этом в зацепление, к примеру, в пазы внутри подножки 7.
В альтернативном варианте фиксирующее устройство 45 могло бы быть осуществлено и для того, чтобы, вместо одной из подножек 7, взаимодействовать с другими компонентами транспортирующего полотна 9, к примеру, с тяговой цепью 3 или с насаживаемыми на неё осями. Также возможна пристройка к двигающимся по замкнутой круговой траектории поручням перил или к приводным ремням поручней перил.
Поскольку отверстие 49 создаётся за счёт удаления подножек 7 и передающее изображение устройство 43 закреплено на транспортёре 13, то передающее изображение устройство 43 может постепенно перемещаться вдоль пути 5 движения в зоне 19 транспортировки. При этом передающее изображение устройство 43 своей зоной обзора может быть направлено через отверстие 49 на расположенные ниже компоненты 26 структуры и может считывать их изображения.
Передающее изображение устройство 43 может быть осуществлено в предпочтительном варианте для того, чтобы считывать трёхмерные изображения несущей структуры 2 внутри зоны обзора. Для этого передающее изображение устройство 43 может быть осуществлено, к примеру, в виде 3D лазерного сканера или в виде ТОЕ (времяпролётной) камеры 53.
Для того, чтоб иметь возможность максимально считывать изображения вдоль всей несущей структуры 2, зафиксированное на транспортёре 13 передающее изображение устройство 43 вместе с транспортирующим полотном 9 может постепенно перемещаться вдоль пути 5 движения в зоне 19 транспортировки и при этом считывать несколько изображений из различных положений.
Относящиеся к изображениям данные или сигналы могут быть переданы затем на вычислительное устройство 47. Вычислительное устройство 47 может быть предусмотрено при этом непосредственно на передающем изображение устройстве 43 или даже может быть встроено в него. В этом случае 3D-модель может быть сформирована непосредственно в оснащённом вычислительным устройством 47 передающем изображение устройстве 43. Далее созданная 3D-модель может быть, в случае необходимости, передана в контрольный центр для её оценки.
В альтернативном варианте вычислительное устройство 47, как изображено на фиг.1 в качестве примера, может быть представлено в виде отдельного блока. Такое отдельное вычислительное устройство 47 может располагаться, к примеру, вблизи эскалатора 1 и взаимодействовать с передающим изображение устройством 43, к примеру, через беспроводное соединение передачи данных. В альтернативном варианте вычислительное устройство 47 может располагаться также ещё более удалённо, к примеру, в контрольном центре, находящемся вне здания или даже в другом городе. В этом случае данные и сигналы передающего изображение устройства 43 могут передаваться, к примеру, по проводной или беспроводной сети на вычислительное устройство 47.
На основании полученных от передающего изображение устройства 43 данных по изображениям в вычислительном устройстве 47 может быть генерирована трёхмерная модель считанной передающим изображение устройством 43 несущей структуры 2 эскалатора 1. На основании этой 3D-модели габариты отдельных компонентов 26 структуры и/или их положение и ориентация относительно друг друга могут быть измерены более точно.
Основываясь на полученных при этом данных измерений, специалисты могут затем осуществить подготовительные мероприятия, чтобы иметь возможность заменить предыдущие компоненты транспортёра 13 после их удаления на новые компоненты. В частности, новые компоненты или предусмотренные для монтажа переходные элементы или нечто подобное уже могут быть соответствующим образом рассчитаны или согласованы, так что затем они могут быть быстро и без проблем смонтированы в месте замены на оставшуюся несущую структуру 2.
Чтобы иметь возможность упростить или сделать более точным считывание изображений, а также генерирование 3D-модели, основываясь на данных нескольких считанных изображений, перед процессом считывания вдоль пути 5 движения в зоне 19 транспортировки в предпочтительном варианте может быть расположено несколько однозначно распознаваемых контрольных отметок 55. Контрольные отметки 55 могут быть предусмотрены, к примеру, в виде наклеек с уникальным присвоенным кодом, к примеру, баркодом или QR-кодом.
Контрольные отметки 55 могут располагаться при этом таким образом, что находятся внутри поля обзора передающего изображение устройства 43, по меньшей мере, когда они расположены в определённых положениях для считывания. Положения для считывания могут быть выбраны при этом таким образом, что на каждом изображении фиксируется, по меньшей мере, одна контрольная отметка 55, в предпочтительном варианте, по меньшей мере, две контрольные отметки 55.
На основании совместно считанных контрольных отметок 55 далее возможно проще сгенерировать общее изображение из отдельных изображений и/или откалибровать его, и/или рассчитать возможные, обусловленные, к примеру, ошибками при считывании, искажения.
В случае необходимости передающее изображение устройство 43 может быть осуществлено далее для того, чтобы при помощи устройства 57 обмена сигналами взаимодействовать с системой 24 управления эскалатора 1. К примеру, система 24 управления может быть тогда всегда ориентирована на то, чтобы остановить приводное устройство 25 эскалатора 1, когда передающее изображение устройство 43 достигло определённых положений, так что передающее изображение устройство 43 в этих положениях при остановленном транспортёре 13 может считывать изображения без смазывания. Далее передающее изображение устройство 43 может ориентировать систему 24 управления на то, чтобы прекратить работу приводного устройства 25, пока передающее изображение устройство 43 полностью не пройдёт зону 19 транспортировки и, к примеру, не приблизится к её противоположному концу.
Наконец, следует указать на то, что термины «имеющие», «содержащие» и проч. не исключают наличия других элементов или этапов, а такие термины как «одна» или «один» не исключают наличия большого количества. Далее следует указать на то, что признаки или этапы, которые были описаны со ссылкой на один из вышеприведённых примеров осуществления, могут использоваться также в комбинации с другими признаками или этапами других или описанных примеров осуществления. Ссылки в пунктах формулы изобретения не следует рассматривать как ограничения.
| название | год | авторы | номер документа |
|---|---|---|---|
| КОНТРОЛЬ МЕХАНИЧЕСКОГО СОСТОЯНИЯ ЭСКАЛАТОРА ИЛИ ТРАВОЛАТОРА | 2018 |
|
RU2754023C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ КОМПЛЕКТОВАНИЯ ИЗГОТАВЛИВАЕМОГО УСТРОЙСТВА ДЛЯ ПЕРЕВОЗКИ ЛЮДЕЙ ПОСРЕДСТВОМ СОЗДАНИЯ ЦИФРОВОГО ДВОЙНИКА | 2018 |
|
RU2769372C2 |
| СИСТЕМА ДВИЖУЩЕГОСЯ ПОЛОТНА ДЛЯ ЭСКАЛАТОРА ИЛИ ТРАВЕЛАТОРА | 2013 |
|
RU2641566C2 |
| СПОСОБ МОДЕРНИЗАЦИИ ЭСКАЛАТОРА ИЛИ ТРАВОЛАТОРА | 2017 |
|
RU2735750C2 |
| УСТАНОВКА ДЛЯ ТРАНСПОРТИРОВКИ ЛЮДЕЙ С КОНТРОЛЬНЫМ И МАРКИРОВОЧНЫМ УСТРОЙСТВАМИ ДЛЯ МАРКИРОВКИ ДЕФЕКТНЫХ СТУПЕНЧАТЫХ БЛОКОВ | 2017 |
|
RU2736242C2 |
| СИСТЕМА ПРОЕЗЖЕЙ ЧАСТИ ЭСКАЛАТОРА ИЛИ ТРАВОЛАТОРА | 2015 |
|
RU2672317C1 |
| ПАЛЛЕТА ДЛЯ ТРАВОЛАТОРА ИЛИ СТУПЕНЬ ДЛЯ ЭСКАЛАТОРА | 2014 |
|
RU2661246C2 |
| КОМПОНОВКА КОНТРОЛЬНОГО ДАТЧИКА В ЭСКАЛАТОРЕ ИЛИ В ТРАВОЛАТОРЕ | 2014 |
|
RU2647391C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ КОНТРОЛЯ СОСТОЯНИЯ УСТАНОВКИ ДЛЯ ПЕРЕМЕЩЕНИЯ ПАССАЖИРОВ ПУТЕМ ИСПОЛЬЗОВАНИЯ ЦИФРОВОГО ДВОЙНИКА | 2018 |
|
RU2770721C2 |
| НАПРАВЛЯЮЩАЯ ПЛАНКА ДЛЯ ХОДОВОЙ НАПРАВЛЯЮЩЕЙ ЭСКАЛАТОРА ИЛИ ТРАВОЛАТОРА | 2013 |
|
RU2634753C2 |
Фиксируют на эскалаторе (1) записывающее изображение устройство (43). Одну из подножек (7) удаляют, чтобы открыть визуальный доступ к расположенным ниже, предназначенным для измерения компонентам (26) структуры. Перед записью изображений стационарно на эскалаторе (1) в одном месте на пути (5) движения размещают контрольную отметку (55), выполненную с возможностью однозначного распознавания для 3D-камеры (43). Эскалатор (1) вместе с зафиксированной на нём 3D-камерой (43) смещают по круговой траектории по части пути (5) движения. Запись предназначенных для измерения компонентов (26) структуры посредством 3D-камеры (43) осуществляют из нескольких положений вдоль пути (5) движения. Осуществляют создание 3D-модели фрагментов компонентов (26) несущей структуры (2) на базе записанных изображений и с помощью совместно записанной контрольной отметки (55). Предложены также способ измерения компонентов (26) несущей структуры (2) эскалатора, способ модернизации эскалатора, устройство (41) для создания 3D-модели компонентов (26) несущей структуры (2) эскалатора. Достигается упрощение измерения несущей структуры эскалатора. 4 н. и 9 з.п. ф-лы, 2 ил.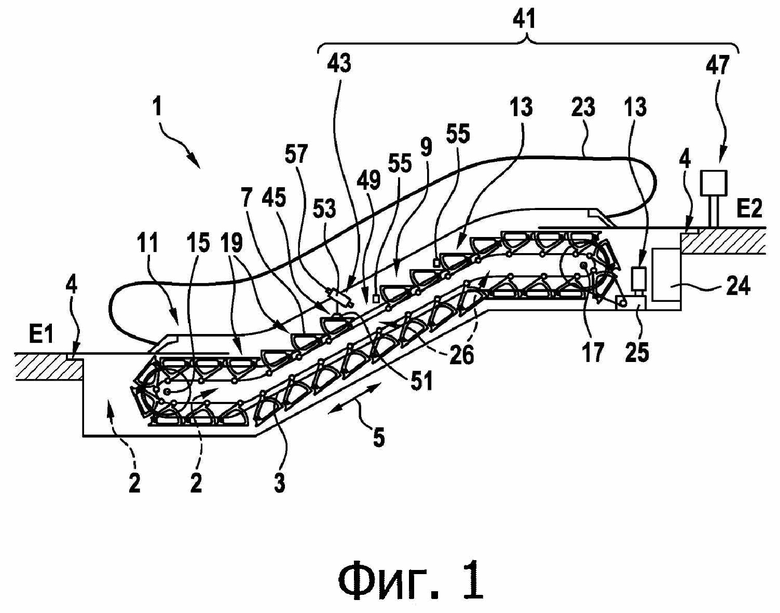
1. Способ создания 3D-модели компонентов (26) несущей структуры (2) эскалатора (1) или траволатора,
причём эскалатор (1) или траволатор имеет транспортёр (13) с несколькими выполненными с возможностью перемещения вдоль имеющего круговую траекторию пути (5) движения подножками (7),
причём способ имеет этапы:
- записывающее изображение устройство (43) фиксируют на транспортёре (13),
- по меньшей мере, одну из подножек (7) удаляют, чтобы открыть визуальный доступ к расположенным ниже, предназначенным для измерения компонентам (26) структуры,
- перед записью изображений, стационарно на эскалаторе (1) или на траволаторе, в, по меньшей мере, одном месте на пути (5) движения размещают, по меньшей мере, одну контрольную отметку (55), выполненную с возможностью однозначного распознавания для записывающего изображение устройства (43),
- транспортёр (13) вместе с зафиксированным на нём записывающим изображение устройством (43) смещают по круговой траектории, по меньшей мере, по части пути (5) движения,
- запись предназначенных для измерения компонентов (26) структуры посредством записывающего изображение устройства (43) осуществляют из нескольких положений вдоль пути (5) движения, и
- осуществляют создание 3D-модели, по меньшей мере, фрагментов компонентов (26) несущей структуры (2) на базе записанных изображений и с помощью, по меньшей мере, одной, совместно записанной контрольной отметки (55).
2. Способ по п.1, причём при создании 3D-модели несколько изображений, с учётом совместно записанных на изображениях контрольных отметок (55), монтируют в общее изображение.
3. Способ по п.1 или 2, причём при создании 3D-модели искажения в изображениях корректируют на основании совместно записанных на изображениях контрольных отметок (55).
4. Способ по любому из пп.1-3, причём созданную 3D-модель калибруют на основании записанных вместе на изображениях контрольных отметок (55).
5. Способ по любому из пп. 1-4, причём изображения записывают во время непрерывного перемещения транспортёра (13).
6. Способ по любому из пп.1-4, причём перемещение транспортёра (13) во время записи изображений периодически прерывают.
7. Способ по любому из пп. 1-6, причём осуществляют обмен сигналами записывающего изображение устройства (43) с системой (24) управления эскалатора (1) или траволатора, при этом координируют запись изображений с перемещением транспортёра (13).
8. Способ по любому из пп. 1-7, причём на подножки (7), по меньшей мере, в зоне (19) транспортировки могут заходить пассажиры, а записывающее изображение устройство (43) настраивают на распознавание конца зоны (19) транспортировки и на основании этого сигнализировать системе (24) управления эскалатора (1) или траволатора об окончании перемещения транспортёра (13).
9. Способ измерения компонентов (26) несущей структуры (2) эскалатора (1) или траволатора, содержащий этапы:
- создание 3D-модели компонентов (26) несущей структуры (2) посредством способа в соответствии с любым из пп.1-8,
- измерение компонентов (26) структуры на основании 3D-модели.
10. Способ модернизации эскалатора (1) или траволатора, содержащий этапы:
- определение габаритов внутри несущей структуры (2) эскалатора (1) или траволатора посредством измерения компонентов (26) несущей структуры (2) при помощи способа в соответствии с п.9,
- удаление закреплённых на несущей структуре (2) изношенных компонентов эскалатора (1) или траволатора,
- установка новых компонентов эскалатора (1) или траволатора на несущей структуре (2), причём позиционирование новых компонентов на несущей структуре (2) осуществляют с учётом ранее определённых габаритов внутри несущей структуры (2).
11. Устройство (41) для создания 3D-модели компонентов (26) несущей структуры (2) эскалатора (1) или траволатора, причём эскалатор (1) или траволатор имеет транспортёр (13) с несколькими установленными с возможностью перемещения вдоль имеющего круговую траекторию пути (5) движения подножками (7), причём подножки (7) вдоль пути (5) движения расположены друг за другом и, по меньшей мере, в зоне (19) транспортировки, в которой пассажиры могут заходить на подножки (7), выше предназначенных для измерения компонентов (26) структуры,
причём устройство (41) имеет:
- записывающее изображение устройство (43), установленное и настроенное с возможностью записывать изображения предназначенных для измерения компонентов (26) структуры, и
- фиксирующее устройство (45), установленное с возможностью фиксировать записывающее изображение устройство (43) на транспортёре (13),
отличающееся тем, что устройство имеет, по меньшей мере, одну, выполненную с возможностью однозначного распознавания контрольную отметку (55), которая выполнена с возможностью стационарной установки на эскалаторе (1) или на траволаторе, по меньшей мере, в одном месте на пути (5) движения,
а также вычислительное устройство (47), которое настроено на то, чтобы создавать 3D-модели, по меньшей мере, фрагментов компонентов (26) несущей структуры (2) на базе записанных посредством записывающего изображение устройства (43) изображений, при помощи совместно записанных на изображениях контрольных отметок (55).
12. Устройство по п.11, причём записывающим изображение устройством (43) является 3D записывающее изображение устройство для записи 3D-изображений.
13. Устройство по п.11 или 12, имеющее устройство (57) обмена сигналами, настроенное на то, чтобы производить обмен сигналами между записывающим изображение устройством (43) и системой (24) управления эскалатора (1) или траволатора, для координации записи изображений с перемещением транспортёра (13).
| JP 2015202915 A, 16.11.2015 | |||
| EP 2933779 A1, 21.10.2015 | |||
| Машина для отделения семян от тунговых и подобных им плодов | 1950 |
|
SU91061A1 |

