Область техники
Настоящее изобретение относится к устройству управления амортизацией колебаний. В частности, настоящее изобретение относится к устройству управления амортизацией колебаний, которое подавляет колебание на стороне кузова транспортного средства, более близкой, чем устройство подвески транспортного средства.
Уровень техники
Пока транспортное средство движется, поскольку так называемое колебание подрессоренной части, которое является колебанием на стороне кузова транспортного средства, более близкой, чем подвеска транспортного средства, создается посредством операции управления, выполняемой водителем, и возмущающего воздействия, в то время как транспортное средство движется, угловое пространственное положение транспортного средства изменяется, и, таким образом, вертикальные нагрузки на соответствующие колеса могут изменяться посредством изменения углового пространственного положения. Поскольку вертикальные нагрузки оказывают влияние на боковые реактивные силы, создаваемые в колесах, когда вертикальные нагрузки соответствующих колес изменяются, боковые реактивные силы соответствующих колес изменяются, поскольку изменяются вертикальные нагрузки. Когда боковые реактивные силы соответствующих колес изменяются, как описано выше, может изменяться баланс боковых реактивных сил во всем транспортном средстве. Когда изменяется баланс боковых реактивных сил во всем транспортном средстве, характер поведения транспортного средства может становиться нестабильным. Следовательно, в области традиционных транспортных средств, существует транспортное средство, которое подавляет изменение углового пространственного положения транспортного средства.
Например, в системе управления стабилизацией транспортного средства, описанной в публикации JP 2006-69472 (далее - Патентный Документ 1), продольное колебание в ответ на текущую движущую силу определяется на основе уравнения состояния модели колебания подрессоренной части кузова транспортного средства и т.п., и определяется корректирующее значение, посредством которого определенное таким образом продольное колебание быстро становится равным 0. Кроме того, продольное колебание, которое является видом колебаний подрессоренной части, подавляется посредством корректировки требуемого крутящего момента двигателя на основе корректирующего значения. То есть, требуемый крутящий момент двигателя корректируется посредством корректирующего значения для подавления продольного колебания, и двигатель управляется так, что крутящий момент, формируемый в двигателе, становится требуемым крутящим моментом двигателя, после того как он корректируется, так что подавляется продольное колебание. С помощью этой операции изменение углового пространственного положения транспортного средства может быть пресечено, и характер поведения транспортного средства может быть стабилизирован, когда транспортное средство движется.
Техническая задача
Среди современных транспортных средств существует так называемое гибридное транспортное средство, которое использует двигатель в качестве двигателя внутреннего сгорания вместе с электродвигателем, приводимым в действие электричеством, в качестве источников энергии, когда транспортное средство движется. Гибридное транспортное средство формирует требуемую движущую силу, требуемую водителем, посредством управления соответствующим образом двигателя и электродвигателя в ответ на состояние передвижения транспортного средства. Дополнительно, когда колебание подрессоренной части подавляется в гибридном транспортном средстве, то есть, когда выполняется управление амортизацией колебаний подрессоренной части, крутящий момент, формируемый в двигателе, и крутящий момент, формируемый в электродвигателе, корректируются посредством корректирующего значения, которое может выполнять управление амортизацией колебаний подрессоренной части аналогично случаю, в котором продольное колебание подавляется системой управления стабилизацией транспортного средства, описанной в Патентном Документе 1. С помощью этой операции управление амортизацией колебаний подрессоренной части может выполняться также в гибридном транспортном средстве.
Когда управление амортизацией колебаний подрессоренной части выполняется в гибридном транспортном средстве, хотя управление амортизацией колебаний подрессоренной части выполняется не только посредством корректировки крутящего момента двигателя, но также посредством корректировки крутящего момента электродвигателя, как описано выше, электродвигатель устанавливается в транспортное средство и приводится в действие энергией аккумулятора, который также используется для другого управления транспортным средством. Следовательно, когда управление амортизацией колебаний подрессоренной части выполняется посредством корректировки крутящего момента электродвигателя, хотя энергия аккумулятора используется для управления амортизацией колебаний подрессоренной части и для другого управления, энергия аккумулятора может неустойчиво использоваться для этих управлений в зависимости от состояния аккумулятора. Следовательно, управление амортизацией колебаний подрессоренной части и другое управление, которые используют энергию аккумулятора, не могут устойчиво выполняться.
Дополнительно, хотя эксплуатационные показатели аккумулятора ухудшаются посредством повторения заряда и разряда, когда эксплуатационные показатели аккумулятора ухудшаются, поскольку аккумулятор не может соответствующим образом генерировать энергию, управление, которое выполняется с помощью энергии аккумулятора, не может соответствующим образом выполняться в этом случае. В частности, поскольку аккумулятор имеет различную степень ухудшения эксплуатационных показателей в зависимости от состояния использования, когда состояние использования не является хорошим, ухудшение эксплуатационных показателей ускоряется, и управление, выполняемое с помощью энергии аккумулятора, отличается от выполняемого более должным образом. Как описано выше, когда управление амортизацией колебаний подрессоренной части выполняется посредством корректировки крутящего момента электродвигателя, существует случай, когда другое управление не может выполняться соответствующим образом.
Задачей настоящего изобретения, которая была решена, принимая во внимание вышеописанные обстоятельства, является создание устройства управления амортизацией колебаний, допускающего пресечение влияния на другое управление, которое вызвано выполнением управления амортизацией колебаний подрессоренной части.
Решение задачи
Для решения упомянутой задачи, в устройстве управления амортизацией колебаний, согласно настоящему изобретению, для подавления колебания подрессоренной части, формируемого на кузове транспортного средства посредством входного воздействия от поверхности дороги на колеса, предусмотренные на транспортном средстве, посредством управления движущей силой транспортного средства амортизация колебаний подрессоренной части в качестве подавления колебаний подрессоренной части выполняется посредством управления крутящего момента электродвигателя, размещенного в качестве источника энергии, когда, по меньшей мере, транспортное средство движется, и амортизация колебаний подрессоренной части, которая выполняется посредством управления крутящим моментом электродвигателя, ограничивается в ответ на состояние аккумулятора, который предоставляет энергию электродвигателю, или на состояние управления, которое оказывает влияние на энергию аккумулятора.
Кроме того, в устройстве управления амортизацией колебаний согласно настоящему изобретению транспортное средство дополнительно включает в себя двигатель внутреннего сгорания в качестве источника энергии при движении, и амортизация колебаний подрессоренной части ограничивается в момент времени, в который двигатель внутреннего сгорания запускается или останавливается.
Кроме того, в устройстве управления амортизацией колебаний согласно настоящему изобретению амортизация колебаний подрессоренной части ограничивается в момент времени, в который двигатель внутреннего сгорания запускается или останавливается, а также когда напряжение аккумулятора равно или больше, чем верхнее предельное пороговое значение, или равно или меньше, чем нижнее предельное пороговое значение.
Дополнительно, в устройстве управления амортизацией колебаний согласно настоящему изобретению верхнее предельное пороговое значение и нижнее предельное пороговое значение напряжения аккумулятора изменяются за счет температуры аккумулятора.
Кроме того, в устройстве управления амортизацией колебаний согласно настоящему изобретению амортизация колебаний подрессоренной части ограничивается в момент времени, в который двигатель внутреннего сгорания запускается или останавливается, а также когда ток аккумулятора равен или больше, чем верхнее предельное пороговое значение, или равен или меньше, чем нижнее предельное пороговое значение.
Дополнительно, в устройстве управления амортизацией колебаний согласно настоящему изобретению верхнее предельное пороговое значение и нижнее предельное пороговое значение тока аккумулятора изменяются за счет температуры аккумулятора.
Дополнительно, в устройстве управления амортизацией колебаний согласно настоящему изобретению транспортное средство включает в себя двигатель внутреннего сгорания в качестве источника энергии при движении и средство очистки, которое очищает выхлопной газ, выпускаемый из двигателя внутреннего сгорания, и амортизация колебаний подрессоренной части ограничивается, когда выполняется требование нагрева средства очистки.
Дополнительно, в устройстве управления амортизацией колебаний согласно настоящему изобретению амортизация колебаний подрессоренной части ограничивается, когда температура аккумулятора равна или больше, чем верхнее предельное пороговое значение, или равна или меньше, чем нижнее предельное пороговое значение.
Кроме того, в устройстве управления амортизацией колебаний согласно настоящему изобретению транспортное средство включает в себя средство управления самодиагностикой отказов, которое выполняет управление самодиагностикой отказов, и амортизация колебаний подрессоренной части ограничивается, когда выполняется управление самодиагностикой отказов.
Кроме того, в устройстве управления амортизацией колебаний согласно настоящему изобретению транспортное средство включает в себя средство управления с обратной связью по величине заряда/разряда, которое выполняет управление с обратной связью по величине заряда/разряда в качестве управления для регулирования величины заряда аккумулятора и величины разряда аккумулятора в ответ на величину заряда аккумулятора, и амортизация колебаний подрессоренной части ограничивается, в то время как выполняется управление с обратной связью по величине заряда/разряда.
Дополнительно, в устройстве управления амортизацией колебаний согласно настоящему изобретению, в то время как выполняется амортизация колебаний подрессоренной части, управление с обратной связью по величине заряда/разряда ограничивается.
Преимущества изобретения
Устройство управления амортизацией колебаний согласно настоящему изобретению достигает преимущества в том, что может быть пресечено влияние на другое управление, вызванное выполнением управления амортизацией колебаний подрессоренной части.
Краткое описание чертежей
Фиг.1 - схематический вид главной части транспортного средства, имеющего устройство управления амортизацией колебаний согласно первому варианту осуществления настоящего изобретения;
Фиг.2 - подробный вид двигателя, показанного на фиг.1;
Фиг.3 - вид конфигурации главной части устройства управления амортизацией колебаний, показанного на фиг.1;
Фиг.4 - блок-схема последовательности операций, показывающая процедуру обработки устройства управления амортизацией колебаний согласно первому варианту осуществления;
Фиг.5 - вид конфигурации главной части устройства управления амортизацией колебаний согласно второму варианту осуществления;
Фиг.6 - пояснительный вид, показывающий верхнее/нижнее предельные пороговые значения напряжений по отношению к температуре аккумулятора;
Фиг.7 - блок-схема последовательности операций, показывающая процедуру обработки устройства управления амортизацией колебаний согласно второму варианту осуществления;
Фиг.8 - вид конфигурации главной части устройства управления амортизацией колебаний согласно третьему варианту осуществления;
Фиг.9 - блок-схема последовательности операций, показывающая процедуру обработки устройства управления амортизацией колебаний согласно третьему варианту осуществления;
Фиг.10 - вид конфигурации главной части устройства управления амортизацией колебаний согласно четвертому варианту осуществления;
Фиг.11 - блок-схема последовательности операций, показывающая процедуру обработки устройства управления амортизацией колебаний согласно четвертому варианту осуществления;
Фиг.12 - вид конфигурации главной части устройства управления амортизацией колебаний согласно пятому варианту осуществления;
Фиг.13 - блок-схема последовательности операций, показывающая процедуру обработки устройства управления амортизацией колебаний согласно пятому варианту осуществления;
Фиг.14 - вид конфигурации главной части устройства управления амортизацией колебаний согласно шестому варианту осуществления;
Фиг.15 - пояснительный вид коэффициента усиления устройства управления амортизацией колебаний подрессоренной части, который изменяется в ответ на скорость транспортного средства;
Фиг.16 - блок-схема последовательности операций, показывающая процедуру обработки устройства управления амортизацией колебаний согласно шестому варианту осуществления;
Фиг.17 - вид конфигурации главной части устройства управления амортизацией колебаний согласно модификации второго варианта осуществления;
Фиг.18 - пояснительный вид, показывающий верхнее/нижнее предельные пороговые значения напряжений по отношению к температуре аккумулятора;
Фиг.19 - блок-схема последовательности операций, показывающая процедуру обработки устройства управления амортизацией колебаний согласно модификации второго варианта осуществления;
Фиг.20 - вид конфигурации главной части устройства управления амортизацией колебаний согласно модификации шестого варианта осуществления; и
Фиг.21 - блок-схема последовательности операций, показывающая процедуру обработки устройства управления амортизацией колебаний согласно модификации шестого варианта осуществления.
Перечень ссылочных позиций
1 - Транспортное средство
2, 90, 100, 110, 120, 130 - Устройство управления амортизацией колебаний
3 - Гибридное устройство
5 - Двигатель
10 - Электродвигатель
11 - Генератор
12 - Механизм распределения мощности
14 - Аккумулятор
20 - Колесо
45 - Каталитический нейтрализатор
46 - Датчик температуры каталитического нейтрализатора
47 - Датчик соотношения воздух-топливо
50 - Главный ЭБУ
51 - ЭБУ двигателя
52 - ЭБУ электродвигателя
53 - ЭБУ аккумулятора
63 - Контроллер движущей силы
66 - Контроллер амортизации колебаний подрессоренной части
67 - Блок определения рабочего состояния двигателя
76 - Блок получения температуры каталитического нейтрализатора
77 - Блок получения соотношения воздух-топливо
86 - Блок получения напряжения
87 - Блок получения тока
91 - Блок определения напряжения
92, 112 - Блок получения температуры аккумулятора
93 - Блок определения тока
101 - Блок определения требования нагрева каталитического нейтрализатора
102 - Блок определения нагрева каталитического нейтрализатора
111 - Блок определения температуры аккумулятора
121 - Контроллер бортовой диагностики (БД) повреждения каталитического нейтрализатора
122 - Контроллер БД датчика соотношения воздух-топливо
123 - Блок определения состояния выполнения БД
131 - Блок определения состояния выполнения управления с обратной связью по величине заряда/разряда
132 - Блок определения состояния выполнения управления амортизацией колебаний подрессоренной части
133 - Блок вычисления величины управляющего воздействия по обратной связи на величину заряда/разряда
Подробное описание вариантов осуществления изобретения
Варианты осуществления устройства управления амортизацией колебаний согласно настоящему изобретению будут пояснены ниже подробно со ссылкой на чертежи. Следует отметить, что настоящее изобретение никоим образом не ограничивается этими вариантами осуществления. Дополнительно, компоненты в вариантах осуществления включают в себя компоненты, которые могут легко быть заменены специалистом в данной области техники или которые, по существу, являются одинаковыми компонентами.
Первый вариант осуществления изобретения
Фиг.1 представляет собой схематический вид главной части транспортного средства, имеющего устройство управления амортизацией колебаний согласно первому варианту осуществления настоящего изобретения. В последующем пояснении направление движения, когда транспортное средство 1 движется в обычном случае, определяется как направление вперед, а противоположное направление движения определяется как направление назад. Дополнительно, колебание подрессоренной части в последующем пояснении является колебанием, которое является входным воздействием от поверхности дороги на колесо транспортного средства и создается на кузове транспортного средства через подвеску, например, колебание, имеющее частотный компонент, например, от 1 до 4 Гц и более, в частности, частотный компонент приблизительно равный 1,5 Гц, и колебание подрессоренной части транспортного средства включает в себя компонент в продольном направлении или в направлении подпрыгивания (вертикальном направлении транспортного средства. Дополнительно, амортизация колебаний подрессоренной части подавляет колебание подрессоренной части транспортного средства.
Транспортное средство 1, показанное на фиг.1, включает в себя устройство 2 управления амортизацией колебаний согласно первому варианту осуществления, транспортное средство 1 включает в себя гибридное устройство 3, имеющее двигатель 5 в качестве двигателя внутреннего сгорания и электродвигатель (мотор-генератор) 10, приводимый в действие электричеством, и двигатель 5 и электродвигатель 10 предоставляются вместе как источники энергии, которые генерируют энергию, когда транспортное средство 1 движется. Кроме того, гибридное устройство 3 включает в себя генератор (мотор-генератор) 11, который принимает выходную мощность двигателя 5 и генерирует энергию, и двигатель 5 и генератор 11 соединяются посредством механизма 12 распределения мощности. Дополнительно, механизм 12 распределения мощности и электродвигатель 10 соединяются вместе с редуктором 15 скорости, а редуктор 15 скорости соединяется с передними колесами 21, которые располагаются как ведущие колеса из колес 20, предусмотренных с транспортным средством 1, через приводной вал 16. Среди них, механизм 12 распределения мощности распределяет выходную мощность двигателя 5 к генератору 11 и редуктору 15 скорости.
Дополнительно, редуктор 15 скорости уменьшает выходную мощность двигателя 5 и выходную мощность электродвигателя 10, передаваемую через механизм 12 распределения мощности, и передает уменьшенные выходные мощности передним колесам 21 как ведущим колесам. То есть, редуктор 15 скорости располагается на пути передачи мощности от двигателя 5 к передним колесам 21 и на пути передачи мощности от электродвигателя 10 к передним колесам 21, а также предусматривается в качестве средства переключения передач, которое изменяет скорости выводимой мощности двигателя 5 и выводимой мощности электродвигателя 10 и передает выходные мощности в направлении передних колес 21. Редуктор 15 скорости, расположенный как описано выше, снабжается датчиком 35 скорости транспортного средства в качестве средства обнаружения скорости транспортного средства, которое может обнаруживать скорость транспортного средства, обнаруживая скорость вращения выходного вала (не показан) редуктора 15 скорости. Дополнительно, механизм 12 распределения мощности предусматривается как средство распределения мощности, которое может делить выходную мощность двигателя 5 на выходную мощность для генератора 11 и движущую силу, когда транспортное средство 1 движется.
Электродвигатель 10 является синхронным электродвигателем переменного тока, соединенным с инвертером 13, и возбуждается энергией переменного тока. Инвертер 13 размещается так, чтобы иметь возможность преобразовывать энергию, накопленную в аккумуляторе 14, который является заряжаемым аккумулятором, установленным на транспортном средстве 1, из постоянного тока в переменный ток, и доставлять переменный ток к электродвигателю 10, также как преобразовывать энергию, сгенерированную генератором 10, из переменного тока в постоянный ток и накапливать постоянный ток в аккумуляторе 14. Как описано выше, аккумулятор 14 размещается в качестве источника энергии электродвигателя 10, когда электродвигатель 10 возбуждается, и дополнительно генератор 11 размещается в качестве средства формирования энергии, которое может генерировать энергию посредством выходной мощности двигателя 5, также как может накапливать сгенерированное электричество в аккумуляторе 14. Генератор 11 в основном имеет также приблизительно ту же конфигурацию, что и электродвигатель 10, описанный выше, и имеет конфигурацию как синхронный электродвигатель переменного тока. В этом случае, электродвигатель 10 главным образом выводит движущую силу, тогда как генератор 11 главным образом выполняет роль получения выходной мощности двигателя 5 и формирования энергии.
Дополнительно, хотя электродвигатель 10 главным образом формирует движущую силу, электродвигатель 10 может генерировать также энергию (рекуперативную энергию), используя вращение передних колес 21, и может функционировать также как генератор. В этом случае, поскольку возможно применять рекуперативный тормоз к передним колесам 21, формируя рекуперативный крутящий момент посредством электродвигателя 10, транспортное средство 1 может быть заторможено с помощью рекуперативного тормоза вместе с ножным тормозом и моторным тормозом в качестве обычного средства торможения. В отличие от этого, хотя генератор 11 генерирует энергию, главным образом, принимая выходную мощность двигателя 5, генератор 11 может функционировать также как электродвигатель, который возбуждается посредством получения энергии аккумулятора 14 через инвертер 13.
Дополнительно, двигатель 5, электродвигатель 10, генератор 11 и механизм 12 распределения мощности соединяются с электронным блоком управления (ЭБУ), соответственно, и размещаются так, чтобы управляться посредством ЭБУ. Более конкретно, двигатель 5 и механизм 12 распределения мощности соединяются с ЭБУ 51 двигателя, который управляет двигателем 5 и механизмом 12 распределения мощности, а электродвигатель 10 и генератор 11 соединяются с ЭБУ 52 электродвигателя, который управляет электродвигателем 10 и генератором 11. С такой конфигурацией, двигатель 5 и механизм 12 распределения мощности могут управляться посредством ЭБУ 51 двигателя, а электродвигатель 10 и генератор 11 могут управляться посредством ЭБУ 52 электродвигателя. Дополнительно, аккумулятор 14 соединяется с ЭБУ 53 аккумулятора, который наблюдает за величиной заряда аккумулятора 14 в качестве величины оставшегося электричества.
Дополнительно, ЭБУ 51 двигателя, ЭБУ 52 электродвигателя и ЭБУ 53 аккумулятора соединяются с главным ЭБУ 50, и привод, осуществляемый двигателем 5, и приводы, осуществляемые электродвигателем 10 и генератором 11, всесторонне управляются главным ЭБУ 50. То есть, распределение выходной мощности двигателя 5 и выходных мощностей электродвигателя 10 и генератора 11 определяется главным ЭБУ 50, и соответствующие управляющие команды выводятся из главного ЭБУ 50 в ЭБУ 51 двигателя и ЭБУ 52 электродвигателя, чтобы управлять двигателем 5, электродвигателем 10 и генератором 11 в ответ на определение. Дополнительно, ЭБУ 51 двигателя и ЭБУ 52 электродвигателя выводят информацию двигателя 5, электродвигателя 10 и генератора 11 в главный ЭБУ 50.
Дополнительно, ЭБУ 53 аккумулятора наблюдает за состоянием заряда аккумулятора 14, и когда величина заряда недостаточна, ЭБУ 53 аккумулятора выводит команду требования заряда в главный ЭБУ 50. Главный ЭБУ 50, который принимает команду требования заряда, увеличивает выходную мощность двигателя 5, а также управляет механизмом 12 распределения мощности и увеличивает величину генерируемой энергии в генераторе 11, увеличивая выходную мощность, которая должна быть передана генератору 11 из выходной мощности двигателя 5, и увеличивает рекуперативную величину в момент времени, когда скорость уменьшается, таким образом, выполняя управление для повышения величины заряда. Дополнительно, когда величина заряда увеличивается больше, чем необходимо, ЭБУ 53 аккумулятора выводит команду требования разряда в главный ЭБУ 50, так что главному ЭБУ 50 инструктируется использовать энергию аккумулятора 14 и положительно выполнять операцию разряда. Дополнительно, ЭБУ 53 аккумулятора наблюдает за энергией аккумулятора 14 с тем, чтобы наблюдать за величиной заряда и величиной разряда, и выводит команду требования заряда и команду требования разряда в главный ЭБУ 50, так что заряжаемая энергия и разряжаемая энергия не становятся большой энергией.
Как описано выше, ЭБУ 53 аккумулятора и главный ЭБУ 50 наблюдают за величиной заряда и энергией аккумулятора 14 и выполняют управление с обратной связью по величине заряда/разряда, которое является управлением для регулирования величины заряда и величины разряда так, чтобы сохранять величину заряда/разряда аккумулятора 14 на уровне корректной величины в ответ на величину заряда и мощность. Следовательно, ЭБУ 53 аккумулятора и главный ЭБУ 50 предусматриваются также как средство управления с обратной связью по величине заряда/разряда, которое выполняет управление с обратной связью по величине заряда/разряда.
Дополнительно, передние колеса 21 предусматриваются в качестве ведущих колес, которым передаются выходные мощности двигателя 5 и электродвигателя 10, а также предоставляются в качестве управляемых колес транспортного средства 1, то есть, передние колеса 21 функционируют в качестве ведущих колес и также в качестве управляемых колес. То есть, передние колеса 21, которые предоставляются также в качестве управляемых колес, располагаются так, чтобы управляться посредством рулевого колеса (иллюстрация опущена), расположенного у сиденья водителя транспортного средства 1.
Хотя транспортное средство 1 сконфигурировано как переднеприводное транспортное средство, в котором выходные мощности двигателя 5 и электродвигателя 10 передаются передним колесам 21, и передние колеса 21 формируют движущую силу, транспортное средство 1, которое включает в себя устройство 2 управления амортизацией колебаний согласно первому варианту осуществления, может быть заднеприводным транспортным средством, в котором задние колеса 22 функционируют в качестве ведущих колес и формируют движущую силу, или может быть полноприводным транспортным средством, в котором и передние колеса 21, и задние колеса 22 функционируют в качестве ведущих колес и формируют движущую силу. Устройство 2 управления амортизацией колебаний согласно первому варианту осуществления может быть применено, несмотря на тип привода транспортного средства 1.
Дополнительно, в транспортном средстве 1 педаль 30 акселератора располагается вблизи ноги водителя в состоянии, когда водитель сидит на сидении водителя транспортного средства 1, так, чтобы приводиться в действие, когда выходная мощность двигателя 5 регулируется. Датчик 31 степени открытия акселератора в качестве средства обнаружения степени открытия акселератора, которое может обнаруживать степень нажатия педали 30 акселератора, размещается поблизости от педали 30 акселератора.
Дополнительно, устройства торможения (иллюстрация опускается), размещаются поблизости от соответствующих колес 20, так что транспортное средство 1 может тормозиться посредством формирования тормозящего усилия между колесами 20 и поверхностью дороги, замедляя вращение колес 20, когда устройства торможения задействуются. Дополнительно, датчик 36 скорости колеса в качестве средства обнаружения скорости колеса, которое обнаруживает скорость вращения колес 20, размещается поблизости от соответствующих колес 20. Датчик 36 скорости колеса может независимо обнаруживать скорости соответствующих колес 20, соответственно. Датчик 31 степени открытия акселератора, датчик 36 скорости колеса и датчик 35 скорости транспортного средства подключаются вместе к главному ЭБУ 50.
Фиг.2 представляет собой подробный вид двигателя, показанного на фиг.1. Поскольку двигатель 5 является двигателем внутреннего сгорания, который может приводиться в действие посредством сгорания топлива в камере сгорания, двигатель 5 соединяется с впускным воздушным каналом 41 в качестве воздушного канала, когда воздух для сгорания топлива всасывается, и с выпускным воздушным каналом 42 для выхлопного газа, выпускаемого, после того как топливо сгорает. Среди них, впускной воздушный канал 41 размещается вместе с дроссельной заслонкой 43 в качестве средства регулирования объема всасываемого воздуха, которое регулирует объем воздуха, который может всасываться двигателем 5, и топливным инжектором 44 в качестве средства подачи топлива, которое впрыскивает топливо в камеру 40 сгорания. Дополнительно, выпускной воздушный канал 42 размещается вместе с каталитическим нейтрализатором 45 в качестве средства очистки, которое очищает выхлопной газ, который протекает в выпускном воздушном канале 42. Дополнительно, выпускной воздушный канал 42 размещается вместе с датчиком 46 температуры каталитического нейтрализатора в качестве средства обнаружения температуры каталитического нейтрализатора для обнаружения температуры каталитического нейтрализатора 45 и датчиком 47 соотношения воздух-топливо в качестве средства обнаружения соотношения воздух-топливо для обнаружения соотношения воздух-топливо выхлопного газа, который протекает в выпускном воздушном канале 42. Дроссельная заслонка 43, топливный инжектор 44, датчик 46 температуры каталитического нейтрализатора и датчик 47 соотношения воздух-топливо подключаются к ЭБУ 51 двигателя.
Фиг.3 представляет собой конфигурационный вид главной части устройства управления амортизацией колебаний, показанного на фиг.1. ЭБУ 51 двигателя, ЭБУ 52 электродвигателя и ЭБУ 53 аккумулятора подключаются к главному ЭБУ 50. Среди них, сначала будет пояснен главный ЭБУ 50. Главный ЭБУ 50 размещается с блоком 61 обработки, блоком 70 хранения данных и блоком 71 ввода/вывода, которые соединяются друг с другом и могут доставлять сигнал. Дополнительно, ЭБУ 51 двигателя, ЭБУ 52 электродвигателя и ЭБУ 53 аккумулятора, которые соединены с главным ЭБУ 50, соединяются с блоком 71 ввода/вывода, который вводит и выводит сигнал между ЭБУ 51 двигателя и т.п. Дополнительно, блок 70 хранения данных хранит в себе компьютерную программу для управления устройством 2 управления амортизацией колебаний согласно первому варианту осуществления. Блок 70 хранения данных может быть сконфигурирован как устройство накопителя на жестком диске и накопитель на оптическом магнитном диске, энергонезависимая память, такая как флэш-память (носитель хранения данных только для чтения, такой как CD-ROM), энергозависимая память, такая как оперативное запоминающее устройство (ОЗУ), или комбинация этих запоминающих устройств.
Дополнительно, блок 61 обработки конфигурируется из памяти и центрального процессора (ЦП) и включает в себя блок 62 получения степени открытия акселератора в качестве средства получения величины открытия акселератора, которое может получать степень открытия акселератора из результата обнаружения в датчике 31 степени открытия акселератора, контроллер 63 движущей силы в качестве средства управления движущей силой, которое может управлять движущей силой, формируемой выходными мощностями двигателя 5 и электродвигателя 10 посредством управления двигателем 5 и электродвигателем 10 и механизмом 12 распределения мощности, блок 64 получения скорости транспортного средства в качестве средства получения скорости транспортного средства, которое может получать скорость транспортного средства посредством результата обнаружения в датчике 35 скорости транспортного средства, блок 65 получения скорости колес в качестве средства получения скорости колеса, которое может получать скорости соответствующих колес 20 посредством результата обнаружения в датчике 36 скорости колеса, контроллер 66 амортизации колебаний подрессоренной части в качестве средства управления амортизацией колебаний подрессоренной части, которое выполняет управление амортизацией колебаний подрессоренной части в качестве управления для подавления колебания подрессоренной части, управляя движущей силой, когда транспортное средство 1 движется, и блок 67 определения рабочего состояния двигателя в качестве средства определения рабочего состояния двигателя, которое определяет рабочее состояние двигателя 5.
Дополнительно, основная конфигурация ЭБУ 51 двигателя является такой же, что и конфигурация главного ЭБУ 50, ЭБУ 51 двигателя включает в себя блок 75 обработки, блок 78 хранения данных и блок 79 ввода/вывода аналогично главному ЭБУ 50. Блок 75 обработки, блок 78 хранения данных и блок 79 ввода/вывода соединяются друг с другом и могут доставлять сигнал друг другу. Дополнительно, дроссельная заслонка 43, топливный инжектор 44, датчик 46 температуры каталитического нейтрализатора, датчик 47 соотношения воздух-топливо и механизм 12 распределения мощности, которые соединяются с ЭБУ 51 двигателя, соединяются с блоком 79 ввода/вывода, и блок 79 ввода/вывода вводит и выводит сигнал между дроссельной заслонкой 43, датчиком 46 температуры каталитического нейтрализатора и т.п. Дополнительно, блок 78 хранения данных хранит в себе компьютерную программу, которая управляет устройством 2 управления амортизацией колебаний согласно первому варианту осуществления аналогично блоку 70 хранения данных главного ЭБУ 50.
Дополнительно, блок 75 обработки конфигурируется из памяти и ЦП и включает в себя блок 76 получения температуры каталитического нейтрализатора в качестве средства получения температуры каталитического нейтрализатора, которое может получать температуру каталитического нейтрализатора 45 посредством результата обнаружения в датчике 46 температуры каталитического нейтрализатора, и блок 77 получения соотношения воздух-топливо в качестве средства получения соотношения воздух-топливо, которое может обнаруживать соотношение воздух-топливо воздушно-топливной смеси из воздуха и топлива, когда двигатель 5 работает, посредством результата обнаружения в датчике 47 соотношения воздух-топливо.
Дополнительно, основная конфигурация ЭБУ 52 электродвигателя является такой же конфигурацией, что и у главного ЭБУ 50, и ЭБУ 51 двигателя, и ЭБУ 52 электродвигателя включает в себя блок 81 обработки, блок 82 хранения данных и блок 83 ввода/вывода аналогично главному ЭБУ 50 и т.п. Блок 81 обработки, блок 82 хранения данных и блок 83 ввода/вывода соединяются друг с другом и могут доставлять сигнал друг другу. Дополнительно, электродвигатель 10 и генератор 11, которые соединяются с ЭБУ 52 электродвигателя, соединяются с блоком 83 ввода/вывода, и блок 83 ввода/вывода вводит и выводит сигнал между электродвигателем 10 и генератором 11.
Дополнительно, основная конфигурация ЭБУ 53 аккумулятора является такой же конфигурацией, что и у главного ЭБУ 50 и т.п., и ЭБУ 53 аккумулятора включает в себя блок 85 обработки, блок 88 хранения данных и блок 89 ввода/вывода аналогично главному ЭБУ 50 и т.п. Блок 85 обработки, блок 88 хранения данных и блок 89 ввода/вывода соединяются друг с другом и могут доставлять сигнал друг другу. Дополнительно, аккумулятор 14, который соединен с ЭБУ 53 аккумулятора, соединяется с блоком 89 ввода/вывода, который вводит и выводит сигнал между блоком 89 ввода/вывода и аккумулятором 14.
Дополнительно, блок 85 обработки конфигурируется из памяти и ЦП и включает в себя блок 86 получения напряжения в качестве средства получения напряжения аккумулятора, которое получает напряжение энергии, накопленной в аккумуляторе 14, и блок 87 получения тока в качестве средства получения тока аккумулятора, которое получает ток энергии, накопленной в аккумуляторе 14.
Устройство 2 управления амортизацией колебаний, которое управляется главным ЭБУ 50, ЭБУ 51 двигателя, ЭБУ 52 электродвигателя и ЭБУ 53 аккумулятора, управляется посредством того, что блок 61 обработки главного ЭБУ 50 считывает компьютерную программу в память, установленную в блоке 61 обработки, и выполняет арифметическую операцию на основе, например, результатов обнаружения в датчике 31 степени открытия акселератора и датчике 36 скорости колеса и управляет двигателем 5 и электродвигателем 10 через ЭБУ 51 и ЭБУ 52 электродвигателя в ответ на результат арифметической операции. В это время блок 61 обработки соответствующим образом сохраняет числовое значение посередине арифметической операции в блоке 70 хранения данных или вызывает сохраненное числовое значение, таким образом, выполняя арифметическую операцию. Когда устройство 2 управления амортизацией колебаний управляется, как описано выше, устройство 2 управления амортизацией колебаний может управляться посредством выделенных аппаратных средств, отличных от главного ЭБУ 50, ЭБУ 51 двигателя, ЭБУ 52 электродвигателя, ЭБУ 53 аккумулятора, вместо компьютерной программы.
Устройство 2 управления амортизацией колебаний согласно первому варианту осуществления конфигурируется, как описано выше, и работа устройства 2 управления амортизацией колебаний будет пояснена ниже. Транспортное средство 1, на котором размещено устройство 2 управления амортизацией колебаний согласно первому варианту осуществления, регулирует скорость транспортного средства, регулируя выходные мощности двигателя 5 и электродвигателя 10, когда транспортное средство 1 движется, и передавая выходные мощности передним колесам 21 в качестве ведущих колес. То есть, пока транспортное средство 1 движется, выходная мощность двигателя 5 соответствующим образом распределяется и передается посредством механизма 12 распределения мощности в направлении генератора 11 и в направлении редуктора 15 скорости в ответ на состояние передвижения транспортного средства 1, и дополнительно выходная мощность электродвигателя 10 передается редуктору 15 скорости. После того как скорости выходных мощностей, передаваемых редуктору 15 скорости, уменьшаются редуктором 15 скорости, уменьшенные выходные мощности передаются передним колесам 21. С помощью такой операции передние колеса 21 вращаются, и транспортное средство 1 движется.
Дополнительно, скорость транспортного средства 1, которое двигается за счет передачи выходных мощностей двигателя 5 и электродвигателя 10 передним колесам 21, регулируется посредством управления педалью 30 акселератора, которая размещена внутри транспортного средства 1, с помощью ноги. Когда водитель задействует педаль 30 акселератора, как описано выше, величина хода, то есть, степень открытия акселератора, педали 30 акселератора обнаруживается датчиком 31 степени открытия акселератора, размещенным поблизости от педали 30 акселератора. Результат обнаружения, обнаруженный датчиком 31 степени открытия акселератора, передается блоку 62 получения степени открытия акселератора, предусмотренному в блоке 61 обработки главного ЭБУ 50, и получается посредством блока 62 получения степени открытия акселератора. Степень открытия акселератора, полученная блоком 62 получения степени открытия акселератора, передается контроллеру 63 движущей силы, снабженному блоком 61 обработки главного ЭБУ 50.
Дополнительно, когда выходные мощности двигателя 5 и электродвигателя 10 передаются во время, когда транспортное средство 1 движется, скорость транспортного средства обнаруживается датчиком 35 скорости транспортного средства, размещенным у редуктора 15 скорости, который уменьшает выходные мощности и передает уменьшенную выходную мощность передним колесам 21. Скорость транспортного средства, обнаруженная датчиком 35 скорости транспортного средства, передается в блок 64 получения скорости транспортного средства, предусмотренный в блоке 61 обработки главного ЭБУ 50, и получается посредством блока 64 получения скорости транспортного средства. Скорость транспортного средства, полученная блоком 64 получения скорости транспортного средства, передается контроллеру 63 движущей силы аналогично степени открытия акселератора, полученной блоком 62 получения степени открытия акселератора.
Контроллер 63 движущей силы, которому передаются степень открытия акселератора и скорость транспортного средства, получает выходную мощность, формируемую двигателем 5, и выходную мощность, формируемую электродвигателем 10, на основе степени открытия акселератора и скорости транспортного средства и дополнительно на основе другого результата обнаружения, который используется в другом управлении, когда транспортное средство 1 движется, и показывает состояние, когда транспортное средство 1 движется. То есть, контроллер 63 движущей силы получает требуемую движущую силу, требуемую водителем, в ответ на степень открытия акселератора, скорость транспортного средства и т.п., и получает выходные мощности двигателя 5 и электродвигателя 10, которые могут формировать требуемую движущую силу, из текущего состояния движения.
Требуемая движущая сила включает в себя не только движущую силу при ускорении, но также и силу торможения, то есть, движущую силу в отрицательном направлении, когда предполагается, что движущая сила при ускорении является положительным направлением, а выходная мощность электродвигателя 10 включает в себя также выходную мощность, когда рекуперативный тормоз применяется при торможении. Контроллер 63 движущей силы, который получает выходные мощности двигателя 5 и электродвигателя 10, передает полученные выходные мощности в ЭБУ 51 двигателя и ЭБУ 52 электродвигателя. То есть, выходная мощность двигателя 5, полученная контроллером 63 движущей силы, передается из контроллера 63 движущей силы в ЭБУ 51 двигателя, а выходная мощность электродвигателя 10, полученная контроллером 63 движущей силы, передается из контроллера 63 движущей силы в ЭБУ 52 электродвигателя.
Среди них, ЭБУ 51 двигателя, в который передается выходная мощность двигателя 5, управляет двигателем 5 так, что переданная выходная мощность формируется двигателем 5. В частности, ЭБУ 51 двигателя получает результат обнаружения в датчике 46 температуры каталитического нейтрализатора, расположенном в выпускном воздушном канале 42, посредством блока 76 получения температуры каталитического нейтрализатора, предусмотренного в блоке 75 обработки, и получает результат обнаружения в датчике 47 соотношения воздух-топливо посредством блока 77 получения соотношения воздух-топливо, предусмотренного в блоке 75 обработки, таким образом, регулируя степень открытия дроссельной заслонки 43, расположенной во впускном воздушном канале 41, и объем впрыска топлива, впрыскиваемого топливным инжектором 44, и т.п., в то же время получая рабочее состояние двигателя 5. Таким образом, двигатель 5 управляется так, что выходная мощность двигателя 5 становится выходной мощностью, переданной от контроллера 63 движущей силы. С помощью такой операции, в то время как двигатель 5 работает, выхлопной газ после сгорания в камере 40 сгорания протекает в выпускной воздушный канал 42, и выхлопной газ, который протекает в выпускном воздушном канале 42, выпускается в атмосферу, после того как выхлопной газ очищается каталитическим нейтрализатором 45, расположенным в выпускном воздушном канале 42, и затем громкость звука выхлопа понижается глушителем (иллюстрация опущена). Дополнительно, ЭБУ 52 электродвигателя, в который передается выходная мощность электродвигателя 10, управляет электродвигателем 10 так, что электродвигатель 10 формирует выходную мощность, переданную ему.
Дополнительно, контроллер 63 движущей силы, управляет выходной мощностью, передаваемой от двигателя 5 редуктору 15 скорости, управляя механизмом 12 распределения мощности. Выходная мощность, которая формируется двигателем 5, делится посредством механизма 12 распределения мощности, управляемого контроллером 63 движущей силы, в направлениях редуктора 15 скорости и генератора 11, таким образом, передавая требуемую выходную мощность редуктору 15 скорости и передавая выходную мощность, сформированную электродвигателем 10, от электродвигателя 10 к редуктору 15 скорости. Как описано выше, выходные мощности двигателя 5 и электродвигателя 10, управляемых посредством ЭБУ 51 двигателя и ЭБУ 52 электродвигателя, передаются редуктору 15 скорости и далее передаются от редуктора 15 скорости передним колесам 21, так что транспортное средство 1 движется.
Дополнительно, когда двигатель 5 и электродвигатель 10 заставляют транспортное средство 1 двигаться посредством своих выходных мощностей, как описано выше, двигатель 5 и электродвигатель 10 размещаются так, что транспортное средство 1 может двигаться не только посредством выходной мощности, полученной посредством объединения выходной мощности двигателя 5 и электродвигателя 10, но также посредством выходной мощности любого из двигателя 5 и электродвигателя 10. В таком случае, работа источника энергии на стороне, где его выходная мощность не используется в качестве движущей силы, может быть остановлена. Соответственно, двигатель 5 выполняет так называемую периодическую работу, в которой двигатель 5 приводится в действие или останавливается в ответ на состояние движения транспортного средства 1.
Дополнительно, транспортное средство 1 выполняет управление амортизацией колебаний подрессоренной части, которое является управлением для подавления колебаний подрессоренной части, формируемых, пока транспортное средство 1 движется. Управление амортизацией колебаний подрессоренной части выполняется известным способом управления посредством управления движущей силой транспортного средства 1 в движении. Краткое изложение примера управления амортизацией колебаний подрессоренной части будет пояснено. Скорости соответствующих колес 20, обнаруженные датчиком 36 скорости колеса, получаются блоком 65 получения скорости колес, предусмотренным в блоке 61 обработки главного ЭБУ 50, и полученные скорости колес передаются контроллеру 66 амортизации колебаний подрессоренной части, предусмотренному в блоке 61 обработки главного ЭБУ 50. Дополнительно, требуемая движущая сила, полученная контроллером 63 движущей силы на основе степени открытия акселератора и т.п., передается контроллеру 66 амортизации колебаний подрессоренной части.
Контроллер 66 амортизации колебаний подрессоренной части вычисляет требуемый крутящий момент, то есть, крутящий момент колеса, когда требуемая движущая сила формируется из требуемой движущей силы, переданной из контроллера 63 движущей силы, и вычисляет расчетный крутящий момент, то есть, фактический крутящий момент колеса, включающий в себя также возмущающее воздействие от скоростей колес, переданных из блока 65 получения скорости колес. Контроллер 66 амортизации колебаний подрессоренной части оценивает состояние движения транспортного средства 1 на основе разницы между вычисленным требуемым крутящим моментом и расчетным крутящим моментом, вычисленным, как описано выше, таким образом, оценивая колебание подрессоренной части транспортного средства 1. Дополнительно, контроллер 66 амортизации колебаний подрессоренной части вычисляет корректирующее значение движущей силы для подавления, оцененного таким образом колебания подрессоренной части, и передает вычисленное корректирующее значение контроллеру 63 движущей силы.
Контроллер 63 движущей силы корректирует величину управляющего воздействия на электродвигатель 10 посредством корректирующего значения, переданного от контроллера 66 амортизации колебаний подрессоренной части, и передает скорректированную величину управляющего воздействия в ЭБУ 52 электродвигателя. ЭБУ 52 электродвигателя управляет электродвигателем 10 посредством скорректированной величины управляющего воздействия. То есть, хотя электродвигатель 10 формирует крутящий момент на валу привода при ускорении и формирует рекуперативный крутящий момент при торможении, контроллер 63 движущей силы корректирует крутящий момент на валу привода и рекуперативный крутящий момент посредством корректирующего значения, переданного из контроллера 66 амортизации колебаний подрессоренной части. Фактический крутящий момент на колесе, который формируется посредством передачи крутящего момента электродвигателя 10, управляемого посредством скорректированной величины управляющего воздействия, становится крутящим моментом, который может подавлять колебание подрессоренной части, так что колебание подрессоренной части подавляется.
При управлении амортизацией колебаний подрессоренной части, когда крутящий момент на колесах 20 регулируется, электродвигатель 10 используется, как описано выше. Однако, поскольку электродвигатель 10 приводится в действие энергией аккумулятора 14 или заряжает аккумулятор 14, формируя энергию при рекуперации, когда управление амортизацией колебаний подрессоренной части выполняется, потребляемое количество и заряженное количество энергии, накопленной в аккумуляторе 14, изменяется. То есть, поскольку корректирующее значение, когда управление амортизацией колебаний подрессоренной части выполняется, является значением, основанным на разнице между требуемым крутящим моментом, то есть, крутящим моментом, требуемым водителем, и расчетным крутящим моментом, то есть, фактически сформированным крутящим моментом, корректирующее значение становится положительным или отрицательным для величины управляющего воздействия, когда формируется требуемая движущая сила, требуемая водителем. Следовательно, когда транспортное средство 1 ускоряется, потребляемое количество энергии, когда электродвигатель 10 приводится в действие, изменяется посредством изменения величины управляющего воздействия на электродвигатель 10, а когда транспортное средство 1 тормозит, заряженное количество энергии, которая регенерируется электродвигателем 10 и заряжается в аккумуляторе 14, изменяется посредством изменения крутящего момента электродвигателя 10.
Дополнительно, электродвигатель 10 используется, чтобы запускать двигатель 5, который выполняет периодическую работу. То есть, когда двигатель 5 в заглушенном состоянии запускается, выходная мощность, сформированная электродвигателем 10, частично передается двигателю 5 через редуктор 15 скорости и механизм 12 распределения мощности, таким образом, вращая коленчатый вал (иллюстрация опущена) в качестве вращающегося вала двигателя 5 и запуская двигатель 5. Когда двигатель 5 запускается, как описано выше, двигатель 5 запускается посредством приведения в действие электродвигателя 10, добавляя мощность, которая необходима, чтобы вращать коленчатый вал, и чтобы запускать двигатель 5, к величине управляющего воздействия электродвигателя 10. Следовательно, когда двигатель 5 запускается, потребляемое количество энергии аккумулятора 14 также увеличивается, поскольку увеличивается выходная мощность электродвигателя 10.
Дополнительно, когда транспортное средство 1 тормозит, рекуперативный крутящий момент формируется электродвигателем 10, и формируется торможение двигателем, которое является сопротивлением, формируемым посредством закрытия дроссельной заслонки 43 двигателя 5. Однако, когда двигатель 5 останавливается, поскольку торможение двигателем не применяется, рекуперативный крутящий момент электродвигателя 10 увеличивается, чтобы компенсировать силу торможения, формируемую посредством торможения двигателем, посредством электродвигателя 10, и, таким образом, величина заряда аккумулятора 14 увеличивается. То есть, когда двигатель 5 в действии останавливается, поскольку двигатель 5 не способствует движению транспортного средства 1, механизм 12 распределения мощности не передает мощность двигателя 5 ведущим колесам. Следовательно, когда двигатель 5 останавливается в процессе торможения транспортного средства 1, и мощность двигателя 5 не передается ведущим колесам, торможение двигателем не формируется. Следовательно, когда двигатель 5 останавливается в то время, когда транспортное средство замедляется, поскольку торможением двигателем не применяется, величина рекуперации резко возрастает, поскольку рекуперативный крутящий момент, формируемый электродвигателем 10, резко увеличивается, и, таким образом, величина заряда от электродвигателя 10 в аккумуляторе 14 резко увеличивается.
Как описано выше, когда управление амортизацией колебаний подрессоренной части выполняется, и когда двигатель 5 запускается и останавливается, хотя потребляемое количество и величина заряда энергии аккумулятора 14 изменяются вместе, когда напряжение накопленной энергии избыточно увеличивается или уменьшается, аккумулятор 14 подвержен ухудшению эксплуатационных показателей. Когда эксплуатационные показатели аккумулятора 14 ухудшаются, поскольку электродвигатель 10 неодинаково формирует выходную мощность, уменьшенная величина мощности электродвигателя 10 компенсируется выходной мощностью двигателя 5. Следовательно, расход топлива может ухудшаться, или объем выхлопного газа может увеличиваться, и дополнительно, поскольку выходная мощность электродвигателя 10 понижается, эффективность движения может ухудшаться. Следовательно, устройство 2 управления амортизацией колебаний согласно первому варианту осуществления не выполняет управление амортизацией колебаний подрессоренной части и запуск и остановку двигателя 5 в одно и то же время, чтобы подавлять ухудшение эксплуатационных показателей аккумулятора 14, и, более конкретно, когда двигатель 5 запускается и останавливается, управление амортизацией колебаний подрессоренной части не выполняется.
Фиг.4 является блок-схемой последовательности операций, показывающей процедуру обработки устройства управления амортизацией колебаний согласно первому варианту осуществления. Далее, будет пояснен способ управления посредством устройства 2 управления амортизацией колебаний согласно первому варианту осуществления, то есть, процедура обработки посредством устройства 2 управления амортизации колебаний. В процедуре обработки посредством устройства 2 управления амортизацией колебаний согласно первому варианту осуществления сначала определяется, тот ли это момент времени, в который двигатель запускается или останавливается (этап ST101). Определение выполняется блоком 67 определения рабочего состояния двигателя, предусмотренного в блоке 61 обработки главного ЭБУ 50. Блок 67 определения рабочего состояния двигателя принимает управляющий сигнал, когда двигатель 5 управляется, от ЭБУ 51 двигателя, который управляет двигателем 5, таким образом, определяя, тот ли это момент времени, в который двигатель запускается или двигатель останавливается.
Когда определяется посредством определения в блоке 67 определения рабочего состояния двигателя (этап ST101), что это время, в которое двигатель запускается или двигатель останавливается, управление амортизацией колебаний подрессоренной части запрещается (этап ST102). Управление амортизацией колебаний подрессоренной части запрещается контроллером 66 амортизации колебаний подрессоренной части. Когда блок 67 определения рабочего состояния двигателя определяет, что это время, в которое двигатель 5 запускается или останавливается, даже когда колебание подрессоренной части формируется, контроллер 66 амортизации колебаний подрессоренной части запрещает управление амортизацией колебаний подрессоренной части. Когда управление амортизацией колебаний подрессоренной части запрещается контроллером 66 амортизации колебаний подрессоренной части, процесс пропускает процедуру обработки.
В отличие от этого, когда определяется посредством определения (этап ST101) в блоке 67 определения рабочего состояния двигателя, что это не то время, в которое двигатель запускается или двигатель останавливается, управление амортизацией колебаний подрессоренной части выполняется (этап ST103). То есть, в случае, отличном от того, когда двигатель запускается и двигатель останавливается, когда колебание подрессоренной части формируется в транспортном средстве 1, контроллер 66 амортизации колебаний подрессоренной части выполняет амортизацию колебаний подрессоренной части в ответ на колебание подрессоренной части.
Хотя устройство 2 управления амортизацией колебаний размещается, чтобы выполнять амортизацию колебаний подрессоренной части, управляя крутящим моментом электродвигателя 10, поскольку амортизация колебаний подрессоренной части запрещается в момент времени, когда двигатель 5 запускается или останавливается, может быть пресечено то, что напряжение энергии, заряженной в аккумуляторе 14, чрезмерно увеличивается или уменьшается. Следовательно, поскольку ухудшение эксплуатационных показателей аккумулятора 14 может быть пресечено, и выходная производительность электродвигателя 10 может быть сохранена, может быть гарантирована эффективность движения. Дополнительно, другое управление, которое выполняется с помощью энергии аккумулятора 14, может более надежно выполняться за счет подавления ухудшения эксплуатационных показателей аккумулятора 14. Как результат, может не допускаться то, что другое управление находится под влиянием выполнения управления амортизацией колебаний подрессоренной части.
Второй вариант осуществления изобретения
Хотя устройство 90 управления амортизацией колебаний согласно второму варианту осуществления имеет приблизительно ту же конфигурацию, что и устройство 2 управления амортизацией колебаний согласно первому варианту осуществления, устройство 90 управления амортизацией колебаний имеет отличительный признак в том, что напряжение аккумулятора 14 включается в качестве условия выполнения управления амортизацией колебаний подрессоренной части. Поскольку другая конфигурация является такой же, что и в первом варианте осуществления, пояснение другой конфигурации опускается, а также привязываются одинаковые ссылочные номера. Фиг.5 представляет собой вид конфигурации главной части устройства управления амортизацией колебаний согласно второму варианту осуществления. В устройстве 90 управления амортизацией колебаний согласно второму варианту осуществления определение того, тот ли это момент времени, в который двигатель 5 запускается или останавливается, используется, когда то, запрещено или нет управление амортизацией колебаний подрессоренной части, определяется аналогично устройству 2 управления амортизацией колебаний согласно первому варианту осуществления, и, в устройстве 90 управления амортизацией колебаний согласно второму варианту осуществления, напряжение аккумулятора 14 также используется, чтобы определять, запрещено или нет управление амортизацией колебаний подрессоренной части.
Следовательно, в устройстве 90 управления амортизацией колебаний согласно второму варианту осуществления, блок 61 обработки главного ЭБУ 50 дополнительно включает в себя блок 91 определения напряжения в качестве средства определения напряжения аккумулятора, которое определяет, находится или нет напряжение аккумулятора 14 в предварительно определенном диапазоне, в дополнение к блоку 62 получения степени открытия акселератора, контроллеру 63 движущей силы, блоку 64 получения скорости транспортного средства, блоку 65 получения скорости колес, контроллеру 66 амортизации колебаний подрессоренной части и блоку 67 определения рабочего состояния двигателя. Дополнительно, блок 85 обработки ЭБУ 53 аккумулятора дополнительно включает в себя блок 92 получения температуры аккумулятора в качестве средства получения температуры аккумулятора, которое получает температуру аккумулятора 14, в дополнение к блоку 86 получения напряжения и блоку 87 получения тока.
Устройство 90 управления амортизацией колебаний согласно второму варианту осуществления конфигурируется, как описано выше, и работа устройства 90 управления амортизацией колебаний будет пояснена ниже. Запрещено или нет управление амортизацией колебаний подрессоренной части, определяется в устройстве 90 управления амортизацией колебаний согласно второму варианту осуществления, определение запрета управления амортизацией колебаний подрессоренной части выполняется, когда момент времени является моментом, в который двигатель 5 запускается или останавливается, а также напряжение аккумулятора 14 равно или больше, чем верхнее предельное пороговое значение, или равно или меньше, чем нижнее предельное пороговое значение.
Фиг.6 представляет собой пояснительный вид, показывающий верхнее/нижнее предельные пороговые значения напряжения по отношению к температуре аккумулятора. В устройстве 90 управления амортизацией колебаний согласно второму варианту осуществления, хотя напряжение аккумулятора 14 используется, когда определяется, запрещено или нет управление амортизацией колебаний подрессоренной части, верхнее/нижнее предельные значения напряжения, при которых аккумулятор 14 подвержен ухудшению эксплуатационных показателей, отличаются в зависимости от температуры. То есть, поскольку внутреннее сопротивление аккумулятора 14 увеличивается, когда температура уменьшается, диапазон верхнего/нижнего предельных значений напряжения, при которых аккумулятор 14 подвержен ухудшению эксплуатационных показателей, в соответствии с температурой уменьшается. Следовательно, верхнее предельное значение UV напряжения, которое является верхним предельным пороговым значением напряжения, когда определяется, запрещено или нет управление амортизацией колебаний подрессоренной части, уменьшается, когда температура аккумулятора 14 уменьшается, как показано на фиг.6, а нижнее предельное значение LV напряжения, которое является нижним предельным пороговым значением напряжения, увеличивается, когда температура аккумулятора 14 уменьшается, как показано на фиг.6.
Контроллер 66 амортизации колебаний подрессоренной части запрещает управление амортизацией колебаний подрессоренной части, когда напряжение аккумулятора 14 не находится между верхним предельным значением UV напряжения и нижним предельным значением LV напряжения, которые изменяются в ответ на температуру. Верхнее предельное значение UV напряжения и нижнее предельное значение LV напряжения заранее установлены как значения, которые определяются посредством предоставления верхнего/нижнего предельных значений напряжения, при которых аккумулятор 14 подвержен ухудшению эксплуатационных показателей, с допуском и сохранены в блоке 70 хранения данных главного ЭБУ 50.
Фиг.7 является блок-схемой последовательности операций, показывающей процедуру обработки устройства управления амортизацией колебаний согласно второму варианту осуществления. Далее, будет пояснен способ управления посредством устройства 90 управления амортизацией колебаний согласно второму варианту осуществления, то есть, процедура обработки посредством устройства 90 управления амортизации колебаний. В процедуре обработки посредством устройства 90 управления амортизацией колебаний согласно второму варианту осуществления сначала то, тот ли это момент времени, в который двигатель запускается или двигатель останавливается, определяется блоком 67 определения рабочего состояния двигателя, предусмотренным в блоке 61 обработки главного ЭБУ 50 (этап ST101).
Когда определяется, что это момент времени, в который двигатель запускается или двигатель останавливается, посредством определения в блоке 67 определения рабочего состояния двигателя (этап ST101), далее получается напряжение Vb аккумулятора (этап ST111). Напряжение Vb аккумулятора получается посредством блока 86 получения напряжения, предусмотренного в блоке 85 обработки ЭБУ 53 аккумулятора.
Далее, определяется, выполняется ли условие "нижнее предельное значение LV напряжения < напряжение Vb аккумулятора < верхнее предельное значение UV напряжения" (этап ST112). Определение выполняется блоком 91 определения напряжения, предусмотренным в блоке 61 обработки главного ЭБУ 50, и блок 91 определения напряжения выполняет определение, сравнивая напряжение Vb аккумулятора, полученное блоком 86 получения напряжения, с верхним предельным значением UV напряжения и нижним предельным значением LV напряжения, сохраненными в блоке 70 хранения данных главного ЭБУ 50.
Более конкретно, верхнее предельное значение UV напряжения и нижнее предельное значение LV напряжения по отношению к температуре аккумулятора 14 предварительно устанавливаются и сохраняются в блоке 70 хранения данных главного ЭБУ 50, как показано на фиг.6. Дополнительно, когда определение выполняется блоком 91 определения напряжения, температура аккумулятора 14 дополнительно получается блоком 92 получения температуры аккумулятора, предусмотренным в блоке 85 обработки ЭБУ 53 аккумулятора, в дополнение к напряжению Vb аккумулятора. Блок 91 определения напряжения вычисляет верхнее предельное значение UV напряжения и нижнее предельное значение LV напряжения при текущей температуре аккумулятора 14 посредством соотношения верхнего предельного значения UV напряжения и нижнего предельного значения LV напряжения с температурой аккумулятора 14, сохраненного в блоке 70 хранения данных главного ЭБУ 50, и посредством температуры аккумулятора 14, полученной блоком 92 получения температуры аккумулятора, и сравнивает вычисленное верхнее предельное значение UV напряжения и нижнее предельное значение LV напряжения с напряжением Vb аккумулятора, полученным блоком 86 получения напряжения. Блок 91 определения напряжения определяет посредством сравнения, устанавливается ли соотношение "нижнее предельное значение LV напряжения < напряжение Vb аккумулятора < верхнее предельное значение UV напряжения".
Когда определяется, что соотношение "верхнее предельное значение LV напряжения < напряжение Vb аккумулятора < верхнее предельное значение UV" напряжения не устанавливается, посредством определения в блоке 91 определения напряжения (этап ST112), то есть, когда определяется, что устанавливается соотношение "напряжение Vb аккумулятора ≥ верхнее предельное значение UV напряжения", или когда определяется, что устанавливается соотношение "напряжение Vb аккумулятора ≤ нижнее предельное значение LV напряжения", управление амортизацией колебаний подрессоренной части запрещается (этап ST102). Амортизация колебаний подрессоренной части запрещается контроллером 66 амортизации колебаний подрессоренной части, предусмотренным в блоке 61 обработки главного ЭБУ 50. Когда амортизация колебаний подрессоренной части запрещается контроллером 66 амортизации колебаний подрессоренной части, процесс пропускает процедуру обработки.
В отличие от этого, когда определяется посредством определения (этап ST101) в блоке 67 определения рабочего состояния двигателя, что это не момент времени, в который двигатель запускается и двигатель останавливается, или даже когда это момент времени, в который двигатель запускается и двигатель останавливается, управление амортизацией колебаний подрессоренной части выполняется (этап ST103), когда определяется посредством определения в блоке 91 определения напряжения (этап ST112), что установлено соотношение "нижнее предельное значение LV напряжения < напряжение Vb аккумулятора < верхнее предельное значение UV напряжения". То есть, даже когда это является моментом времени, в который двигатель запускается и двигатель останавливается, управление амортизацией колебаний подрессоренной части выполняется контроллером 66 амортизации колебаний подрессоренной части в ответ на колебание подрессоренной части, когда напряжение Vb аккумулятора находится между верхним предельным значением UV напряжения и нижним предельным значением LV напряжения.
Когда это является моментом времени, в который двигатель 5 запускается или останавливается, а также напряжение аккумулятора 14 равно или больше, чем верхнее предельное значение UV напряжения, или равно или меньше, чем нижнее предельное значение LV напряжения, поскольку устройство 90 управления амортизацией колебаний, описанное выше, запрещает амортизацию колебаний подрессоренной части, колебание подрессоренной части может быть пресечено, и ухудшение эксплуатационных показателей аккумулятора 14 может быть пресечено в то же самое время более надежно. То есть, даже когда определяется, что это - момент времени, в который двигатель 5 запускается или останавливается, аккумулятору 14 не свойственно ухудшение эксплуатационных показателей за счет чрезмерно увеличившегося или уменьшившегося напряжения, когда напряжение аккумулятора 14 меньше, чем верхнее предельное значение UV напряжения, а также больше, чем нижнее предельное значение LV напряжения, то есть, когда напряжение Vb аккумулятора находится между верхним предельным значением UV напряжения и нижним предельным значением LV напряжения. Следовательно, даже когда определяется, что это является моментом времени, в который двигатель 5 запускается или останавливается, амортизация колебаний подрессоренной массы может выполняться, в то же время пресекая ухудшение эксплуатационных показателей аккумулятора 14, и период, в течение которого амортизация колебаний подрессоренной массы выполняется, может быть увеличен, когда напряжение Vb аккумулятора находится между верхним предельным значением UV напряжения и нижним предельным значением LV напряжения. Как результат, колебание подрессоренной части может более надежно подавляться, в то же время пресекая влияние выполнения управления амортизацией колебаний подрессоренной части на другое управление.
Дополнительно, поскольку верхнее предельное значение UV напряжения и нижнее предельное значение LV напряжения изменяются в зависимости от температуры аккумулятора 14, то, находится или нет аккумулятор в состоянии, в котором он подвержен ухудшению эксплуатационных показателей, может быть определено более точно. То есть, поскольку внутреннее сопротивление аккумулятора 14 изменяется за счет температуры, пороговое значение напряжения, при котором эксплуатационные показатели аккумулятора 14 ухудшаются посредством чрезмерно повышенного или пониженного напряжения, отличается в зависимости от температуры. Следовательно, то, находится или нет аккумулятор 14 в состоянии, в котором он подвержен ухудшению эксплуатационных показателей, может быть определено более точно посредством изменения верхнего предельного значения UV напряжения и нижнего предельного значения LV напряжения, которые являются пороговыми значениями, когда определяется, запрещена или нет амортизация колебаний подрессоренной части, с помощью напряжения аккумулятора 14 в момент времени, когда двигатель 5 запускается или останавливается, в ответ на температуру аккумулятора 14. Соответственно, когда определяется, что это является моментом времени, в который двигатель 5 запускается или останавливается, может быть более соответствующим образом определено, находится или нет аккумулятор 14 в состоянии, в котором он подвержен ухудшению эксплуатационных показателей, и период, в течение которого амортизация колебаний подрессоренной части выполняется, может быть увеличен посредством выполнения управления амортизацией колебаний подрессоренной части, когда аккумулятор 14 находится в состоянии, в котором ему не свойственно ухудшение эксплуатационных показателей. Как результат, колебание подрессоренной части может более надежно подавляться, в то же время пресекая влияние выполнения управления амортизацией колебаний подрессоренной части на другое управление.
В устройстве 90 управления амортизацией колебаний, описанном выше, когда верхнее предельное значение UV напряжения и нижнее предельное значение LV напряжения вычисляются, они вычисляются на основе температуры аккумулятора 14. Однако, когда температура аккумулятора 14 не может быть обнаружена, другая температура может быть использована вместо температуры аккумулятора 14, и, например, верхнее предельное значение UV напряжения и нижнее предельное значение LV напряжения могут быть вычислены с помощью температур охлаждающей жидкости двигателя 5 и инвертера 13, температуры всасываемого воздуха, температуры наружного воздуха и т.п. в качестве замещений. Поскольку температура аккумулятора 14 изменяется в зависимости также от окружающей среды, даже если температура аккумулятора 14 не может быть обнаружена, значения, близкие верхнему предельному значению UV напряжения и нижнему предельному значению LV напряжения, могут быть вычислены посредством обнаружения вышеупомянутых температур. С помощью такой операции пороговое значение напряжения Vb аккумулятора может быть легко вычислено, и, таким образом, ссылка на то, когда определяется, запрещена или нет амортизация колебаний подрессоренной массы, может быть более простым образом установлена. Как результат, колебание подрессоренной части может более простым образом подавляться, в то же время пресекая влияние выполнения управления амортизацией колебаний подрессоренной части на другое управление.
Дополнительно, когда температура аккумулятора 14 не может быть обнаружена, верхнее предельное значение UV напряжения и нижнее предельное значение LV напряжения могут быть установлены в предварительно заданные постоянные значения. Когда верхнее предельное значение UV напряжения и нижнее предельное значение LV напряжения установлены в постоянные значения, поскольку управление для обнаружения датчиком обнаружения аккумулятора 14 температуры аккумулятора 14 и дополнительное управление для вычисления верхнего предельного значения UV напряжения и нижнего предельного значения LV напряжения на основе температуры аккумулятора 14 становятся необязательными, то, выполняется или нет амортизация колебаний подрессоренной части, может быть легко определено. Как результат, колебание подрессоренной части может более простым образом подавляться, в то же время пресекая влияние выполнения управления амортизацией колебаний подрессоренной части на другое управление.
Третий вариант осуществления изобретения
Хотя устройство 100 управления амортизацией колебаний согласно третьему варианту осуществления имеет ту же конфигурацию, что и устройство 2 управления амортизацией колебаний согласно первому варианту осуществления, устройство 100 управления амортизацией колебаний имеет отличительный признак в том, что, то, выполняется или нет амортизация колебаний подрессоренной массы, определяется на основе того, выполняется ли требование нагрева каталитического нейтрализатора 45. Поскольку другая конфигурация является такой же, что и в первом варианте осуществления, пояснение другой конфигурации опускается, а также используются одинаковые ссылочные позиции. Фиг.8 представляет собой вид конфигурации главной части устройства управления амортизацией колебаний согласно третьему варианту осуществления. Устройство 100 управления амортизацией колебаний согласно третьему варианту осуществления использует условие, выполняется или нет требование нагрева каталитического нейтрализатора 45, чтобы определять, запрещается или нет управление амортизацией колебаний подрессоренной части. Следовательно, в устройстве 100 управления амортизацией колебаний согласно третьему варианту осуществления блок 61 обработки главного ЭБУ 50 включает в себя блок 62 получения степени открытия акселератора, контроллер 63 движущей силы, блок 64 получения скорости транспортного средства, блок 65 получения скорости колес и контроллер 66 амортизации колебаний подрессоренной части и дополнительно включает в себя блок 101 определения требования нагрева каталитического нейтрализатора в качестве средства определения требования нагрева каталитического нейтрализатора, которое определяет, выполняется или нет требование нагрева каталитического нейтрализатора 45 от двигателя 5. Дополнительно, блок 75 обработки ЭБУ 51 двигателя дополнительно включает в себя блок 102 определения нагрева каталитического нейтрализатора в качестве средства определения нагрева каталитического нейтрализатора, которое определяет, выполняется или нет нагрев каталитического нейтрализатора, в дополнение к блоку 76 получения температуры каталитического нейтрализатора и блоку 77 получения соотношения воздух-топливо.
Устройство 100 управления амортизацией колебаний согласно третьему варианту осуществления конфигурируется, как описано выше, и работа устройства 100 управления амортизацией колебаний будет пояснена ниже. Когда устройство 100 управления амортизацией колебаний согласно третьему варианту осуществления определяет, запрещена или нет амортизация колебаний подрессоренной части, определение для запрещения амортизации колебаний подрессоренной части выполняется, когда выполняется требование нагрева каталитического нейтрализатора 45 от двигателя 5. То есть, когда двигатель 5 работает, результат обнаружения в датчике 46 температуры каталитического нейтрализатора, который обнаруживает температуру каталитического нейтрализатора 45, получается блоком 76 получения температуры каталитического нейтрализатора, предусмотренным в блоке 75 обработки ЭБУ 51 двигателя, и блок 102 определения нагрева каталитического нейтрализатора, снабженный блоком 75 обработки ЭБУ 51 двигателя, определяет, действительно ли полученная температура каталитического нейтрализатора 45 равна или меньше, чем пороговое значение, которое используется, чтобы определять, выполняется или нет нагрев каталитического нейтрализатора. Когда блок 102 определения нагрева каталитического нейтрализатора определяет, что нагрев каталитического нейтрализатора выполняется, поскольку температура каталитического нейтрализатора 45, полученная блоком 76 получения температуры каталитического нейтрализатора, равна или меньше, чем пороговое значение, ЭБУ 51 двигателя выполняет операцию нагрева каталитического нейтрализатора. Отметим, что пороговое значение температуры каталитического нейтрализатора 45, которое используется, чтобы определять, выполняется или нет нагрев каталитического нейтрализатора, предварительно сохраняется в блоке 78 хранения данных ЭБУ 51 двигателя.
Когда блок 102 определения нагрева каталитического нейтрализатора выполняет операцию нагрева каталитического нейтрализатора, определяя, что нагрев каталитического нейтрализатора выполняется, температура каталитического нейтрализатора 45 повышается на ранней стадии посредством повышения температуры выхлопного газа, например, посредством задержки момента зажигания и т.п. Дополнительно, когда момент зажигания задерживается, чтобы нагревать каталитический нейтрализатор 45, как описано выше, крутящий момент двигателя 5 становится невысоким. Соответственно, когда операция нагрева каталитического нейтрализатора выполняется, поскольку уменьшенная величина крутящего момента двигателя 5 компенсируется крутящим моментом электродвигателя 10, крутящий момент электродвигателя 10 увеличивается по сравнению со случаем, когда операция нагрева каталитического нейтрализатора не выполняется, и потребление энергии аккумулятора 14 также увеличивается. Дополнительно, поскольку управление амортизацией колебаний подрессоренной части подавляет колебание подрессоренной части посредством изменения крутящего момента электродвигателя 10 в ответ на колебание подрессоренной части потребление энергии аккумулятора 14 увеличивается, когда выполняется амортизация колебаний подрессоренной части.
Когда двигатель 5 работает, поскольку приоритет отдается скорее формированию требуемой водителем движущей силы, чем операции нагрева каталитического нейтрализатора, операция нагрева каталитического нейтрализатора прерывается, когда требуемая движущая сила не может быть сформирована, поскольку потребление энергии аккумулятора 14 становится чрезмерно большим в процессе выполнения операции нагрева каталитического нейтрализатора, и, таким образом, требуемый крутящий момент не может быть сформирован электродвигателем 10. В этом случае, поскольку температура каталитического нейтрализатора 45 становится температурой, равной или меньшей, чем температура, при которой выхлопной газ может эффективно очищаться, выхлопной газ не может эффективно очищаться каталитическим нейтрализатором 45. Следовательно, в устройстве 100 управления амортизацией колебаний согласно третьему варианту осуществления, когда операция нагрева каталитического нейтрализатора выполняется, крутящий момент, сформированный электродвигателем 10 гарантируется посредством запрещения амортизации колебаний подрессоренной части и уменьшения потребления энергии аккумулятора 14, таким образом, продолжая операцию нагрева каталитического нейтрализатора.
Фиг.9 представляет собой блок-схему последовательности операций, показывающую процедуру обработки устройства управления амортизацией колебаний согласно третьему варианту осуществления. Далее, будет пояснен способ управления посредством устройства 100 управления амортизацией колебаний согласно третьему варианту осуществления, то есть, процедура обработки посредством устройства 100 управления амортизации колебаний. В процедуре обработки посредством устройства 100 управления амортизацией колебаний согласно третьему варианту осуществления сначала определяется, выполняется ли требование нагрева каталитического нейтрализатора от двигателя 5 (этап ST201). Определение выполняется блоком 101 определения требования нагрева каталитического нейтрализатора, предусмотренным в блоке 61 обработки главного ЭБУ 50. Операция нагрева каталитического нейтрализатора 45 выполняется, когда блок 102 определения нагрева каталитического нейтрализатора, предусмотренный в блоке 75 обработки ЭБУ 51 двигателя, определяет, что температура каталитического нейтрализатора 45, обнаруженная датчиком 46 температуры каталитического нейтрализатора, равна или меньше, чем предварительно определенное пороговое значение. Поскольку операция нагрева каталитического нейтрализатора 45 выполняется на основе определения в блоке 102 определения нагрева каталитического нейтрализатора, как описано выше, блок 101 определения требования нагрева каталитического нейтрализатора определяет, выполняется или нет требование нагрева каталитического нейтрализатора, на основе определения в блоке 102 определения нагрева каталитического нейтрализатора.
То есть, когда блок 102 определения нагрева каталитического нейтрализатора определяет, что температура каталитического нейтрализатора 45 равна или меньше, чем предварительно определенное пороговое значение, поскольку операция нагрева каталитического нейтрализатора 45 выполняется, блок 101 определения требования нагрева каталитического нейтрализатора определяет, что требование нагрева каталитического нейтрализатора от двигателя 5 выполняется в этом случае. В отличие от этого, когда блок 102 определения нагрева каталитического нейтрализатора определяет, что температура каталитического нейтрализатора 45 выше, чем предварительно определенное пороговое значение, поскольку операция нагрева каталитического нейтрализатора 45 не выполняется, блок 101 определения требования нагрева каталитического нейтрализатора определяет, что требование нагрева каталитического нейтрализатора от двигателя 5 не выполняется в этом случае.
Когда определяется, что требование нагрева каталитического нейтрализатора от двигателя 5 выполняется, посредством определения в блоке 101 определения требования нагрева каталитического нейтрализатора (этап ST201), амортизация колебаний подрессоренной части запрещается (этап ST202). Амортизация колебаний подрессоренной части запрещается контроллером 66 амортизации колебаний подрессоренной части, предусмотренным в блоке 61 обработки главного ЭБУ 50. Когда амортизация колебаний подрессоренной части запрещается контроллером 66 амортизации колебаний подрессоренной части, процесс пропускает процедуру обработки.
В отличие от этого, когда определяется посредством определения в блоке 101 определения требования нагрева каталитического нейтрализатора (этап ST201), что требование нагрева каталитического нейтрализатора не выполняется от двигателя 5, выполняется амортизация колебаний подрессоренной части (этап ST203). То есть, когда колебание подрессоренной части формируется в транспортном средстве 1 в то время, когда требование нагрева каталитического нейтрализатора от двигателя 5 не выполняется, контроллер 66 амортизации колебаний подрессоренной части выполняет амортизацию колебаний подрессоренной части в ответ на колебание подрессоренной части.
Когда требование нагрева каталитического нейтрализатора от двигателя 5 выполняется, поскольку устройство 100 управления амортизацией колебаний, описанное выше, запрещает амортизацию колебаний подрессоренной части, операция нагрева каталитического нейтрализатора 45 может быть продолжена. То есть, когда операция нагрева каталитического нейтрализатора 45 выполняется, потребление энергии аккумулятора 14 также увеличивается, поскольку крутящий момент электродвигателя 10 увеличивается, чтобы компенсировать крутящий момент двигателя 5, который уменьшается посредством операции нагрева. Однако, когда требование нагрева каталитического нейтрализатора от двигателя 5 выполняется, потребление энергии аккумулятора 14 может быть уменьшено посредством запрещения амортизации колебаний подрессоренной части. С помощью этой операции операция нагрева каталитического нейтрализатора 45 может быть продолжена, и эффективность очистки выхлопного газа может быть более надежно обеспечена. Как результат, может быть более надежно пресечено то, что другое управление находится под влиянием выполнения управления амортизацией колебаний подрессоренной части.
Четвертый вариант осуществления изобретения
Хотя устройство 110 управления амортизацией колебаний согласно четвертому варианту осуществления имеет приблизительно ту же конфигурацию, что и устройство 2 управления амортизацией колебаний согласно первому варианту осуществления, устройство 110 управления амортизацией колебаний имеет отличительный признак в том, что, выполняется или нет амортизация колебаний подрессоренной части, определяется на основе температуры аккумулятора 14. Поскольку другая конфигурация является такой же, что и в первом варианте осуществления, пояснение другой конфигурации опускается, а также используются одинаковые ссылочные позиции. Фиг.10 представляет собой вид конфигурации главной части устройства управления амортизацией колебаний согласно четвертому варианту осуществления. Устройство 110 управления амортизацией колебаний согласно четвертому варианту осуществления использует температуру аккумулятора 14, чтобы определять, запрещается или нет управление амортизацией колебаний подрессоренной части. Следовательно, в устройстве 110 управления амортизацией колебаний согласно четвертому варианту осуществления блок 61 обработки главного ЭБУ 50 дополнительно включает в себя блок 111 определения температуры аккумулятора в качестве средства определения температуры аккумулятора, которое определяет, находится или нет температура аккумулятора 14 в предварительно определенном диапазоне, в дополнение к блоку 62 получения степени открытия акселератора, контроллеру 63 движущей силы, блоку 64 получения скорости транспортного средства, блоку 65 получения скорости колес и контроллеру 66 амортизации колебаний подрессоренной части. Дополнительно, блок 85 обработки ЭБУ 53 аккумулятора дополнительно включает в себя блок 112 получения температуры аккумулятора в качестве средства получения температуры аккумулятора, которое получает температуру аккумулятора 14, в дополнение к блоку 86 получения напряжения и блоку 87 получения тока.
Устройство 110 управления амортизацией колебаний согласно четвертому варианту осуществления конфигурируется, как описано выше, и работа устройства 110 управления амортизацией колебаний будет пояснена ниже. Когда устройство 110 управления амортизацией колебаний согласно четвертому варианту осуществления определяет, запрещается или нет амортизация колебаний подрессоренной части, устройство 110 управления амортизацией колебаний определяет, что амортизация колебаний подрессоренной части запрещается, когда температура аккумулятора 14 равна или больше, чем верхнее предельное пороговое значение, или равна или меньше, чем нижнее предельное пороговое значение. То есть, когда аккумулятор 14 используется в состоянии, когда температура чрезмерно высокая или чрезмерно низкая, аккумулятор 14 подвержен ухудшению эксплуатационных показателей.
Когда, например, выполняется пояснение относительно случая, в котором ионно-литиевая батарея используется в качестве примера аккумулятора 14, использование аккумулятора 14 в состоянии, когда температура аккумулятора 14 чрезмерно низкая, осаждает металл Li (литий), посредством чего эксплуатационные показатели аккумулятора 14 ухудшаются, или когда ток используется с высокой частотой, аккумулятор 14 подвержен ухудшению эксплуатационных показателей. Дополнительно, когда аккумулятор 14 используется в состоянии, в котором температура аккумулятора 14 чрезмерно высокая, аккумулятор 14 склонен в ускоренном темпе изнашиваться и ухудшать эксплуатационные показатели, заряжаясь и разряжаясь.
Как описано выше, когда аккумулятор 14 используется в состоянии, когда температура чрезмерно высокая или чрезмерно низкая, аккумулятор 14 подвержен ухудшению эксплуатационных показателей. Когда эксплуатационные показатели аккумулятора 14 ухудшаются, поскольку электродвигателю 10 несвойственно формировать выходную мощность, величина уменьшения выходной мощности электродвигателя 10 компенсируется выходной мощностью двигателя 5. В этом случае расход топлива может ухудшаться, или объем выхлопного газа может увеличиваться. Дополнительно, уменьшение выходной мощности электродвигателя 10 может ухудшать эффективность движения.
Следовательно, когда температура аккумулятора 14 равна или меньше нижней предельной температуры α, которая является нижним предельным пороговым значением, и равна или больше, чем верхняя предельная температура β, которая является верхним предельным пороговым значением, контроллер 66 амортизации колебаний подрессоренной части запрещает амортизацию колебаний подрессоренной части, чтобы уменьшать использование аккумулятора 14. Отметим, что нижняя предельная температура α и верхняя предельная температура β предварительно устанавливаются как значения, которые определены посредством верхнего/нижнего предельных значений температуры, при которых аккумулятор 15 подвергается фактическому ухудшению эксплуатационных показателей, с допуском и сохранены в блоке 70 хранения данных главного ЭБУ 50.
Фиг.11 представляет собой блок-схему последовательности операций, показывающую процедуру обработки устройства управления амортизацией колебаний согласно четвертому варианту осуществления. Далее, будет пояснен способ управления посредством устройства 110 управления амортизацией колебаний согласно четвертому варианту осуществления, то есть, процедура обработки посредством устройства 110 управления амортизацией колебаний. В процедуре обработки посредством устройства 110 управления амортизацией колебаний согласно четвертому варианту осуществления сначала получается температура Tb аккумулятора (этап ST301). Температура Tb аккумулятора получается блоком 112 получения температуры аккумулятора, предусмотренным в блоке 85 обработки ЭБУ 53 аккумулятора.
Далее, определяется, устанавливается ли соотношение "нижняя предельная температура α < температура Tb аккумулятора < верхняя предельная температура β" (этап ST302). Определение выполняется блоком 111 определения температуры аккумулятора, предусмотренным в блоке 61 обработки главного ЭБУ 50, и блок 111 определения температуры аккумулятора выполняет определение, сравнивая температуру Tb аккумулятора, полученную блоком 112 получения температуры аккумулятора, с нижней предельной температурой α и верхней предельной температурой β, сохраненными в блоке 70 хранения данных главного ЭБУ 50.
Когда определяется посредством определения в блоке 111 определения температуры аккумулятора (этап ST302), что соотношение "нижняя предельная температура α < температура Tb аккумулятора < верхняя предельная температура β" не установлено, то есть, когда определяется, что "температура Tb аккумулятора > верхняя предельная температура β", или определяется, что "температура Tb аккумулятора ≤ нижняя предельная температура α", амортизация колебаний подрессоренной части запрещается (этап ST303). Амортизация колебаний подрессоренной части запрещается контроллером 66 амортизации колебаний подрессоренной части, предусмотренным в блоке 61 обработки главного ЭБУ 50. Когда амортизация колебаний подрессоренной части запрещается контроллером 66 амортизации колебаний подрессоренной части, процесс пропускает процедуру обработки.
В отличие от этого, когда определяется посредством определения в блоке 111 определения температуры аккумулятора (этап ST302), что условие "нижняя предельная температура α < температура Tb аккумулятора < верхняя предельная температура β" устанавливается, выполняется амортизация колебаний подрессоренной части (этап ST304). То есть, когда температура Tb аккумулятора находится между нижней предельной температурой α и верхней предельной температурой β, контроллер 66 амортизации колебаний подрессоренной части выполняет амортизацию колебаний подрессоренной части в ответ на колебание подрессоренной части.
Когда температура Tb аккумулятора равна или больше, чем верхняя предельная температура β, или равна или меньше, чем нижняя предельная температура α, поскольку устройство 110 управления амортизацией колебаний, описанное выше, запрещает амортизацию колебаний подрессоренной части, ухудшение эксплуатационных показателей аккумулятора 14 может быть пресечено. То есть, когда аккумулятор 14 используется в состоянии, когда температура чрезмерно высокая или чрезмерно низкая, аккумулятор 14 подвержен ухудшению эксплуатационных показателей. Соответственно, использование аккумулятора 14 в состоянии, когда аккумулятор 14 подвержен ухудшению эксплуатационных показателей, может быть уменьшено посредством запрещения амортизации колебаний подрессоренной части, когда температура Tb аккумулятора равна или больше, чем верхняя предельная температура β, и равна или меньше, чем нижняя предельная температура α. С помощью такой операции, поскольку ухудшение эксплуатационных показателей аккумулятора 14 может быть пресечено, другое управление, выполняемое с использованием энергии аккумулятора 14, может более надежно выполняться. Как результат, может быть более надежно пресечено то, что другое управление находится под влиянием выполнения управления амортизацией колебаний подрессоренной части.
Пятый вариант осуществления изобретения
Хотя устройство 120 управления амортизацией колебаний согласно пятому варианту осуществления имеет приблизительно ту же конфигурацию, что и устройство 2 управления амортизацией колебаний согласно первому варианту осуществления, устройство 120 управления амортизацией колебаний имеет отличительный признак в том, что, выполняется или нет амортизация колебаний подрессоренной части, определяется на основе состояния выполнения управления самодиагностикой отказов. Поскольку другая конфигурация является такой же, что и в первом варианте осуществления, пояснение другой конфигурации опускается, а также используются одинаковые ссылочные позиции. Фиг.12 представляет собой вид конфигурации главной части устройства управления амортизацией колебаний согласно пятому варианту осуществления. Устройство 120 управления амортизацией колебаний согласно пятому варианту осуществления оснащается средством управления самодиагностикой отказов, так что управление может выполняться посредством него, и, в частности, оснащается средством бортовой диагностики (БД) повреждения каталитического нейтрализатора в качестве средства управления самодиагностикой отказов, которое диагностирует, поврежден или нет каталитический нейтрализатор 45, и БД датчика соотношения воздух-топливо в качестве средства самодиагностики отказов, которое диагностирует, отказывает ли датчик 47 соотношения воздух-топливо. Дополнительно, в устройстве 120 управления амортизацией колебаний согласно пятому варианту осуществления состояния выполнения БД повреждения каталитического нейтрализатора и БД датчика соотношения воздух-топливо используются, чтобы определять, запрещено или нет управление амортизацией колебаний подрессоренной части.
Следовательно, в устройстве 120 управления амортизацией колебаний согласно пятому варианту осуществления блок 61 обработки главного ЭБУ 50 дополнительно включает в себя контроллер 121 БД повреждения каталитического нейтрализатора в качестве средства управления диагностикой отказов для средства очистки, которое управляет БД повреждения каталитического нейтрализатора, контроллер 122 БД датчика соотношения воздух-топливо в качестве средства управления диагностикой отказов для средства обнаружения соотношения воздух-топливо, которое управляет БД датчика соотношения воздух-топливо, и блок 123 определения состояния выполнения БД в качестве средства определения состояния выполнения самодиагностики отказов, которое определяет состояния выполнения БД повреждения каталитического нейтрализатора и БД датчика соотношения воздух-топливо, в дополнение к блоку 62 получения степени открытия акселератора, контроллеру 63 движущей силы, блоку 64 получения скорости транспортного средства, блоку 65 получения скорости колес и контроллеру 66 амортизации колебаний подрессоренной части. Среди них, контроллер 121 БД повреждения каталитического нейтрализатора и контроллер 122 БД датчика соотношения воздух-топливо размещаются в качестве средств управления самодиагностикой отказов, которые выполняют управление самодиагностикой отказов.
Устройство 120 управления амортизацией колебаний согласно пятому варианту осуществления конфигурируется, как описано выше, и работа устройства 120 управления амортизацией колебаний будет пояснена ниже. В устройстве 120 управления амортизацией колебаний согласно пятому варианту осуществления, чтобы диагностировать повреждение каталитического нейтрализатора 45 и отказ датчика 47 соотношения воздух-топливо, пока транспортное средство 1 движется, устройство 120 управления амортизацией колебаний выполняет БД повреждения каталитического нейтрализатора и БД датчика соотношения воздух-топливо, когда предварительно определенное условие выполнения, такое как предварительно определенный период, устанавливается, когда транспортное средство 1 движется. Среди них, когда выполняется БД повреждения каталитического нейтрализатора, управляющий сигнал передается от контроллера 121 БД повреждения каталитического нейтрализатора, предусмотренного в блоке 61 обработки главного ЭБУ 50, в ЭБУ 51 двигателя, чтобы изменять соотношение воздух-топливо воздушно-топливной смеси, когда топливо сгорает в камере 40 сгорания двигателя 5 с соотношения воздух-топливо, подходящего для состояния движения транспортного средства 1, в произвольное соотношение воздух-топливо. ЭБУ 51 двигателя, который принимает управляющий сигнал, изменяет соотношение воздух-топливо, управляя топливным инжектором 44 и т.п. Контроллер 121 БД повреждения каталитического нейтрализатора получает температуру и соотношение воздух-топливо каталитического нейтрализатора 45, когда соотношение воздух-топливо изменяется, как описано выше, от блока 76 получения температуры каталитического нейтрализатора и блока 77 получения соотношения воздух топливо, предусмотренных с ЭБУ 51 двигателя, и оценивает состояние повреждения каталитического нейтрализатора 45 из полученного результата.
Дополнительно, когда выполняется БД датчика соотношения воздух-топливо, управляющий сигнал передается от контроллера 122 БД датчика соотношения воздух-топливо, предусмотренного в блоке 61 обработки главного ЭБУ 50, в ЭБУ 51 двигателя, чтобы изменять соотношение воздух-топливо, подходящее для состояния движения транспортного средства 1, на произвольное соотношение воздух-топливо аналогично тому, когда выполняется БД повреждения каталитического нейтрализатора. С помощью такой операции ЭБУ 51 двигателя изменяет соотношение воздух-топливо воздушно-топливной смеси. Контроллер 122 БД датчика соотношения воздух-топливо получает соотношение воздух-топливо, когда соотношение воздух-топливо изменяется, как описано выше, от блока 77 получения соотношения воздух-топливо, предусмотренного с ЭБУ 51 двигателя, и оценивает состояние повреждения и отказ датчика 47 соотношения воздух-топливо из полученного результата.
Дополнительно, когда соотношение воздух-топливо изменяется, чтобы выполнять БД повреждения каталитического нейтрализатора и БД датчика соотношения воздух-топливо, как описано выше, хотя выходная мощность двигателя 5 варьируется посредством изменения соотношения воздух-топливо, когда выходная мощность двигателя 5 варьируется, движущая сила при движении подвергается влиянию вследствие этого. То есть, когда выполняются БД повреждения каталитического нейтрализатора и БД датчика соотношения воздух-топливо, выходная мощность двигателя 5 может уменьшаться посредством изменения соотношения воздух-топливо, и движущая сила уменьшается в этом случае. Следовательно, когда БД повреждения каталитического нейтрализатора и БД датчика соотношения воздух-топливо выполняются, контроллер 121 БД повреждения каталитического нейтрализатора и контроллер 122 БД датчика соотношения воздух-топливо выводят команды для увеличения выходной мощности в ЭБУ 51 двигателя, когда БД повреждения каталитического нейтрализатора и БД датчика соотношения воздух-топливо выполняются.
Когда БД повреждения каталитического нейтрализатора и БД датчика соотношения воздух-топливо выполняются, повреждение каталитического нейтрализатора 45 и отказ датчика 47 соотношения воздух-топливо диагностируются, в то же время обеспечивая эффективность движения посредством увеличения выходной мощности двигателя 5, как описано выше. Дополнительно, изменение выходной мощности двигателя 5, вызванное выполнением БД повреждения каталитического нейтрализатора и БД датчика соотношения воздух-топливо, поглощается выходной мощностью электродвигателя 10 посредством регулирования выходной мощности электродвигателя 10 путем передачи управляющего сигнала в ЭБУ 52 электродвигателя, так что движущая сила сохраняет требуемую движущую силу.
Когда БД повреждения каталитического нейтрализатора и БД датчика соотношения воздух-топливо выполняются, поскольку выходная мощность двигателя 5 изменяется, как описано выше, хотя выходная мощность электродвигателя 10 изменяется, чтобы поглощать изменение, электродвигатель 10 используется, когда выполняется управление амортизацией колебаний подрессоренной части. То есть, поскольку амортизация колебаний подрессоренной части подавляет колебание подрессоренной части, управляя крутящим моментом электродвигателя 10, когда управление амортизацией колебаний подрессоренной части выполняется в состоянии, в котором выходная мощность электродвигателя 10 изменяется в то время, когда выполняются БД повреждения каталитического нейтрализатора и БД датчика соотношения воздух-топливо, крутящий момент электродвигателя 10 не может точно управляться. Следовательно, когда БД повреждения каталитического нейтрализатора и БД датчика соотношения воздух-топливо выполняются, контроллер 66 амортизации колебаний подрессоренной части запрещает амортизацию колебаний подрессоренной части, чтобы обеспечивать эффективность движения транспортного средства 1, когда БД повреждения каталитического нейтрализатора и БД датчика соотношения воздух-топливо выполняются.
Фиг.13 представляет собой блок-схему последовательности операций, показывающую процедуру обработки устройства управления амортизацией колебаний согласно пятому варианту осуществления. Далее, будет пояснен способ управления посредством устройства 120 управления амортизацией колебаний согласно пятому варианту осуществления, то есть, процедура обработки посредством устройства 120 управления амортизации колебаний. В процедуре обработки посредством устройства 120 управления амортизацией колебаний согласно пятому варианту осуществления сначала определяется, тот ли это момент времени, в который выполняется БД повреждения каталитического нейтрализатора, или в который выполняется БД датчика соотношения воздух-топливо (этап ST401). Определение выполняется блоком 123 определения состояния выполнения БД, предусмотренным в блоке 61 обработки главного ЭБУ 50. БД повреждения каталитического нейтрализатора и БД датчика соотношения воздух-топливо выполняются, когда устанавливается предварительно определенное условие выполнения. Среди них, БД повреждения каталитического нейтрализатора выполняется, будучи управляемым контроллером 121 БД повреждения каталитического нейтрализатора, предусмотренным в блоке 61 обработки главного ЭБУ 50, а БД датчика соотношения воздух-топливо выполняется, будучи управляемым контроллером 122 БД датчика соотношения воздух-топливо, предусмотренным в блоке 61 обработки главного ЭБУ 50. Следовательно, блок 123 определения состояния выполнения БД определяет, тот ли это момент времени, в который выполняется БД повреждения каталитического нейтрализатора, или момент времени, в который выполняется БД датчика соотношения воздух-топливо, принимая управляющие сигналы от контроллера 121 БД повреждения каталитического нейтрализатора и контроллера 122 БД датчика соотношения воздух-топливо.
Когда определяется, что это тот момент времени, в который выполняется БД повреждения каталитического нейтрализатора, или в который выполняется БД датчика соотношения воздух-топливо, посредством определения в блоке 123 определения состояния выполнения БД (этап ST401), амортизация колебаний подрессоренной части запрещается (этап ST402). Амортизация колебаний подрессоренной части запрещается контроллером 66 амортизации колебаний подрессоренной части, предусмотренным в блоке 61 обработки главного ЭБУ 50. Когда амортизация колебаний подрессоренной части запрещается контроллером 66 амортизации колебаний подрессоренной части, процесс пропускает процедуру обработки.
В отличие от этого, когда определяется посредством определения в блоке 123 определения состояния выполнения БД (этап ST401), что это не тот момент времени, в который выполняется БД повреждения каталитического нейтрализатора, и в который выполняется БД датчика соотношения воздух-топливо, выполняется амортизация колебаний подрессоренной части (этап ST403). То есть, когда колебание подрессоренной части формируется в транспортном средстве 1 в случае, отличном от случая, в котором выполняется БД повреждения каталитического нейтрализатора, и случая, в котором выполняется БД датчика соотношения воздух-топливо, контроллер 66 амортизации колебаний подрессоренной части выполняет амортизацию колебаний подрессоренной части в ответ на колебание подрессоренной части.
Поскольку устройство 120 управления амортизацией колебаний, описанное выше, запрещает амортизацию колебаний подрессоренной части, когда это является моментом времени, в который выполняется БД повреждения каталитического нейтрализатора, и в который выполняется БД датчика соотношения воздух-топливо, устройство 120 управления амортизацией колебаний может выполнять соответствующее управление. То есть, поскольку выходная мощность 5 изменяется, когда это является момент времени, в который выполняется БД повреждения каталитического нейтрализатора, и в который выполняется БД датчика соотношения воздух-топливо, крутящий момент электродвигателя 10 изменяется в ответ на изменение. Однако, поскольку амортизация колебаний подрессоренной части также выполняется посредством управления крутящим моментом электродвигателя 10, когда БД повреждения каталитического нейтрализатора или БД датчика соотношения воздух-топливо и амортизация колебаний подрессоренной части выполняются в одно и то же время, может быть трудно выполнять корректное и правильное управление и формировать подходящую движущую силу. Следовательно, когда выполняется БД повреждения каталитического нейтрализатора, и когда выполняется БД датчика соотношения воздух-топливо, БД повреждения каталитического нейтрализатора и БД датчика соотношения воздух-топливо могут более надежно выполняться посредством запрещения амортизации колебаний подрессоренной части. То есть, когда БД повреждения каталитического нейтрализатора выполняется, и когда БД датчика соотношения воздух-топливо выполняется, движущая сила, когда БД повреждения каталитического нейтрализатора и БД датчика соотношения воздух-топливо выполняются, может более точным образом управляться посредством запрещения амортизации колебаний подрессоренной части, и, таким образом, эффективность движения транспортного средства 1 может быть обеспечена, когда эти управления выполняются. Как результат, может быть более надежно пресечено то, что другое управление находится под влиянием выполнения управления амортизацией колебаний подрессоренной части.
Отметим, что устройство 120 управления амортизацией колебаний, описанное выше, выполняет БД повреждения каталитического нейтрализатора и БД датчика соотношения воздух-топливо в качестве управления самодиагностикой отказов и использует состояния выполнения БД повреждения каталитического нейтрализатора и БД датчика соотношения воздух-топливо для определения того, запрещено или нет управление амортизацией колебаний подрессоренной части. Однако, управление самодиагностикой отказов, используемое для определения того, запрещено или нет управление амортизацией колебаний подрессоренной части, может быть отличным от БД повреждения каталитического нейтрализатора и БД датчика соотношения воздух-топливо. Управление самодиагностикой отказов, используемое для определения того, запрещается или нет управление амортизацией колебаний подрессоренной части, может быть любым управлением, посредством которого выходная мощность двигателя 5 изменяется, когда управление выполняется. Как описано выше, когда управление самодиагностикой отказов, посредством которого выходная мощность двигателя 5 изменяется, выполняется, управление самодиагностикой отказов может более надежно выполняться посредством запрещения амортизации колебаний подрессоренной части, выполняемой посредством управления крутящим моментом электродвигателя 10. Как результат, эффективность движения транспортного средства 1 может быть обеспечена, когда управление самодиагностикой отказов выполняется, и может более надежно подавляться то, что другое управление находится под влиянием выполнения управления амортизацией колебаний подрессоренной части.
Шестой вариант осуществления изобретения
Хотя устройство 130 управления амортизацией колебаний согласно шестому варианту осуществления имеет приблизительно ту же конфигурацию, что и устройство 2 управления амортизацией колебаний согласно первому варианту осуществления, устройство 130 управления амортизацией колебаний имеет отличительный признак в том, что управление амортизацией колебаний подрессоренной части изменяется в зависимости от того, выполняется или нет управление с обратной связью по величине заряда/разряда. Поскольку другая конфигурация является такой же, что и в первом варианте осуществления, пояснение другой конфигурации опускается, а также привязываются одинаковые ссылочные номера. Фиг.14 представляет собой вид конфигурации главной части устройства управления амортизацией колебаний согласно шестому варианту осуществления. Устройство 130 управления амортизацией колебаний согласно шестому варианту осуществления по-другому управляет колебанием подрессоренной части в ответ на состояние выполнения управления с обратной связью по величине заряда/разряда. Следовательно, в устройстве 130 управления амортизацией колебаний согласно шестому варианту осуществления блок 61 обработки главного ЭБУ 50 дополнительно включает в себя блок 131 определения состояния выполнения управления с обратной связью по величине заряда/разряда в качестве средства определения состояния выполнения управления с обратной связью по величине заряда/разряда, которое определяет состояние выполнения управления с обратной связью по величине заряда/разряда в дополнение к блоку 62 получения степени открытия акселератора, контроллеру 63 движущей силы, блоку 64 получения скорости транспортного средства, блоку 65 получения скорости колес и контроллеру 66 амортизации колебаний подрессоренной части.
Устройство 130 управления амортизацией колебаний согласно шестому варианту осуществления конфигурируется, как описано выше, и работа устройства 130 управления амортизацией колебаний будет пояснена ниже. В то время как транспортное средство 1 движется, энергия аккумулятора 14 наблюдается посредством ЭБУ 53 аккумулятора, и выполняется управление с обратной связью по величине заряда/разряда, которое является управлением для поддержания величины заряда/разряда аккумулятора 14 в соответствующей величине. Более конкретно, управление с обратной связью по величине заряда/разряда управляет и регулирует распределение выходной мощности двигателя 5, который приводится в действие, и выходной мощности электродвигателя 10 и количества энергии, генерируемой генератором 11, посредством главного ЭБУ 50 в ответ на энергию аккумулятора 14, наблюдаемую посредством ЭБУ 53 аккумулятора, таким образом, регулируя величину заряда и величину разряда аккумулятора 14. С помощью такой операции величина заряда/разряда аккумулятора 14 удерживается в предварительно определенном диапазоне.
Дополнительно, при управлении амортизацией колебаний подрессоренной части, поскольку крутящий момент электродвигателя 10 регулируется в ответ на колебание подрессоренной части, энергия аккумулятора 14 периодически изменяется, в то время как выполняется управление амортизацией колебаний подрессоренной части. Однако, когда энергия аккумулятора 14 изменяется, величина обратной связи на величину заряда/разряда также изменяется при управлении с обратной связью по величине заряда/разряда. Поскольку управление с обратной связью по величине заряда/разряда выполняется посредством регулирования выходной мощности двигателя 5, выходной мощности электродвигателя 10 и т.п., когда величина обратной связи на величину заряда/разряда изменяется, как описано выше, выходная мощность двигателя 5 также изменяется, и, таким образом, число оборотов двигателя 5 и крутящий момент двигателя 5 могут изменяться. Следовательно, колебание может увеличиваться вследствие того, что число оборотов двигателя 5 становится числом оборотов, посредством которого колебания имеют тенденцию к формированию, и эффективность движения может ухудшаться вследствие того, что крутящий момент изменяется.
Как описано выше, управление с обратной связью по величине заряда/разряда подвержено взаимному влиянию с управлением амортизацией колебаний подрессоренной части. Однако, поскольку управление с обратной связью по величине заряда/разряда часто или непрерывно выполняется, когда управление амортизацией колебаний подрессоренной части запрещается в момент времени, когда управление с обратной связью по величине заряда/разряда выполняется с целью избегания взаимного влияния управлений, существует вероятность того, что шанс для выполнения управления амортизацией колебаний подрессоренной части сильно уменьшается. Следовательно, пока выполняется управление с обратной связью по величине заряда/разряда, контроллер 66 амортизации колебаний подрессоренной части ограничивает управление амортизацией колебаний подрессоренной части, уменьшая величину управляющего воздействия, когда выполняется управление амортизацией колебаний подрессоренной части, таким образом, уменьшая величину взаимного влияния управлений.
Фиг.15 представляет собой пояснительный вид коэффициента усиления управления амортизацией колебаний подрессоренной части, который изменяется в ответ на скорость транспортного средства. Когда величина управляющего воздействия при управлении амортизацией колебаний подрессоренной части уменьшается, пока выполняется управление с обратной связью по величине заряда/разряда, величина управляющего воздействия уменьшается, делая коэффициент GC усиления управления амортизацией колебаний подрессоренной части в качестве коэффициента усиления управления амортизацией колебаний подрессоренной части меньше 1. Как описано выше, когда коэффициент GC усиления управления амортизацией колебаний подрессоренной части становится меньше 1, амортизация колебаний подрессоренной части может ограничиваться посредством уменьшения величины корректировки крутящего момента электродвигателя 10, когда выполняется управление амортизацией колебаний подрессоренной части. Соответственно, когда управление амортизацией колебаний подрессоренной части выполняется, в то время как выполняется управление с обратной связью по величине заряда/разряда, величина взаимного влияния управлений может быть уменьшена.
Дополнительно, колебание подрессоренной части управляется посредством регулирования крутящего момента электродвигателя 10. Однако, когда скорость транспортного средства увеличивается, поскольку выходная мощность электродвигателя 10 увеличивается, увеличение скорости транспортного средства увеличивает корректирующую величину выходной мощности электродвигателя 10, когда колебание подрессоренной части подавляется. То есть, увеличение скорости транспортного средства увеличивает выходную мощность электродвигателя 10, когда колебание подрессоренной части подавляется. Следовательно, когда коэффициент GC усиления управления амортизацией колебаний подрессоренной части становится меньше 1, в то время как выполняется управление с обратной связью по величине заряда/разряда, коэффициент GC усиления управления амортизацией колебаний подрессоренной части становится меньшим, поскольку скорость транспортного средства увеличивается, как показано на фиг.15.
Фиг.16 представляет собой блок-схему последовательности операций, показывающую процедуру обработки устройства управления амортизацией колебаний согласно шестому варианту осуществления. Далее, будет пояснен способ управления посредством устройства 130 управления амортизацией колебаний согласно шестому варианту осуществления, то есть, процедура обработки посредством устройства 130 управления амортизации колебаний. В процедуре обработки посредством устройства 130 управления амортизацией колебаний согласно шестому варианту осуществления сначала вычисляется крутящий момент амортизации колебаний подрессоренной части (этап ST501). Вычисление выполняется контроллером 66 амортизации колебаний подрессоренной части, предусмотренным в блоке 61 обработки главного ЭБУ 50. Контроллер 66 амортизации колебаний подрессоренной части оценивает колебание подрессоренной части на основе результатов обнаружения в датчике 31 степени открытия акселератора и в датчике 36 скорости колеса и вычисляет корректирующее значение движущей силы для подавления колебания подрессоренной части. То есть, контроллер 66 амортизации колебаний подрессоренной части вычисляет крутящий момент амортизации колебаний подрессоренной части, который является корректирующим значением движущей силы для подавления колебания подрессоренной части, на основе результатов обнаружения в датчике 31 степени открытия акселератора и т.п.
Далее, определяется, выполняется или нет управление с обратной связью по величине заряда/разряда (этап ST502). Определение выполняется блоком 131 определения состояния выполнения управления с обратной связью по величине заряда/разряда, предусмотренным в блоке 61 обработки главного ЭБУ 50. Блок 131 определения состояния выполнения управления с обратной связью по величине заряда/разряда определяет, выполняется ли управление с обратной связью по величине заряда/разряда, получая команду требования заряда и команду требования разряда, которые передаются из ЭБУ 53 аккумулятора в ЭБУ 51 двигателя.
Когда определяется, что управление с обратной связью по величине заряда/разряда выполняется, посредством определения в блоке 131 определения состояния выполнения управления с обратной связью по величине заряда/разряда (этап ST502), коэффициент усиления управления амортизацией колебаний подрессоренной части становится меньше 1 (этап ST503). Коэффициент усиления управления амортизацией колебаний подрессоренной части в момент времени, когда коэффициент усиления становится меньше 1, как описано выше, определяется контроллером 66 амортизации колебаний подрессоренной части. Более конкретно, соотношение между коэффициентом GC усиления управления амортизацией колебаний подрессоренной части и скоростью транспортного средства, которое показано на фиг.15, предварительно сохраняется в блоке 70 хранения данных главного ЭБУ 50, и коэффициент GC усиления управления амортизацией колебаний подрессоренной части в скорости транспортного средства, полученной блоком 64 получения скорости транспортного средства, определяется контроллером 66 амортизации колебаний подрессоренной части на основе соотношения между скоростью транспортного средства, полученной блоком 64 получения скорости транспортного средства, коэффициентом GC усиления управления амортизацией колебаний подрессоренной части, сохраненным в блоке 70 хранения данных, и скоростью транспортного средства. Поскольку коэффициент GC усиления управления амортизацией колебаний подрессоренной части, сохраненный в блоке 70 хранения данных, устанавливается меньше 1, коэффициент GC усиления управления амортизацией колебаний подрессоренной части, который определяется на основе соотношения между коэффициентом GC усиления управления амортизацией колебаний подрессоренной части, сохраненным в блоке 70 хранения данных, и скоростью транспортного средства, становится меньше 1.
Далее, конечный крутящий момент амортизации колебаний подрессоренной части вычисляется путем умножения крутящего момента амортизации колебаний подрессоренной части на коэффициент усиления (этап ST504). Вычисление выполняется контроллером 66 амортизации колебаний подрессоренной части. Контроллер 66 амортизации колебаний подрессоренной части умножает крутящий момент амортизации колебаний подрессоренной части, который вычисляется на основе результатов обнаружения в датчике 31 степени открытия акселератора и т.п. (этап ST501), на коэффициент GC усиления управления амортизацией колебаний подрессоренной части, определенный на основе скорости транспортного средства и т.п., таким образом, вычисляя конечный крутящий момент амортизации колебаний подрессоренной части, когда управление амортизацией колебаний подрессоренной части фактически выполняется в то время, когда выполняется управление амортизацией колебаний подрессоренной части. Контроллер 66 амортизации колебаний подрессоренной части выполняет амортизацию колебаний подрессоренной части посредством вычисленного крутящего момента амортизации колебаний подрессоренной части.
В отличие от этого, когда определяется посредством определения в блоке 131 определения состояния выполнения управления с обратной связью величины заряда/разряда (этап ST502), что управление с обратной связью по величине заряда/разряда не выполняется, контроллер 66 амортизации колебаний подрессоренной части устанавливает коэффициент усиления управления амортизацией колебаний подрессоренной части равным 1 (этап ST505). Далее, контроллер 66 амортизации колебаний подрессоренной части вычисляет конечный крутящий момент амортизации колебаний подрессоренной части посредством умножения крутящего момента амортизации колебаний подрессоренной части на коэффициент усиления (этап ST504). То есть, управление амортизацией колебаний подрессоренной части выполняется путем умножения крутящего момента амортизации колебаний подрессоренной части, который вычисляется на основе результата обнаружения и т.п. в датчике 31 степени открытия акселератора (этап ST501), на коэффициент GC усиления управления амортизацией колебаний подрессоренной части, чье значение устанавливается равным 1 контроллером 66 амортизации колебаний подрессоренной части, таким образом, выполняя амортизацию колебаний подрессоренной части без уменьшения крутящего момента амортизации колебаний подрессоренной части.
Поскольку устройство 130 управления амортизацией колебаний, описанное выше, ограничивает амортизацию колебаний подрессоренной части, делая коэффициент GC усиления управления амортизацией колебаний подрессоренной части меньше 1, в то время как выполняется управление с обратной связью по величине заряда/разряда, может быть пресечено то, что управления взаимно влияют друг на друга, когда выполняется управление с обратной связью по величине заряда/разряда. С помощью такой операции может быть пресечено то, что колебание увеличивается, и эффективность движения ухудшается вследствие того, число оборотов двигателя 5 и крутящий момент двигателя 5 изменяются вследствие взаимодействия между управлением с обратной связью по величине заряда/разряда и управлением амортизацией колебаний подрессоренной части. Как результат, может быть пресечено то, что другое управление находится под влиянием выполнения управления амортизацией колебаний подрессоренной части.
Дополнительно, в то время как выполняется управление с обратной связью по величине заряда/разряда, поскольку коэффициент GC усиления управления амортизацией колебаний становится меньше, когда скорость транспортного средства увеличивается, амортизация колебаний подрессоренной части может выполняться, в то же время более надежно пресекая взаимное влияние между управлением с обратной связью по величине заряда/разряда и управлением амортизацией колебаний подрессоренной части. То есть, когда скорость транспортного средства высокая, поскольку выходная мощность электродвигателя 10 увеличивается в то время, когда колебание подрессоренной части подавляется, даже когда коэффициент GC усиления управления амортизацией колебаний подрессоренной части становится небольшим, крутящий момент амортизации колебаний подрессоренной части, который регулируется посредством управления выходной мощностью электродвигателя 10, может быть сделан величиной, посредством которой колебание подрессоренной части может быть пресечено. Дополнительно, когда скорость транспортного средства высокая, поскольку изменение крутящего момента электродвигателя 10, вызванное управлением амортизацией колебаний подрессоренной части, может быть уменьшено, делая коэффициент GC усиления управления амортизацией колебаний подрессоренной части небольшим, изменение энергии аккумулятора 14 может быть сделано небольшим. С помощью такой операции изменение величины обратной связи на величину заряда/разряда при управлении с обратной связью по величине заряда/разряда может быть также сделано небольшим. Соответственно, взаимное влияние между управлением с обратной связью по величине заряда/разряда и управлением амортизацией колебаний подрессоренной части может быть более надежно уменьшено, и таким образом ухудшение эффективности движения и т.п., вызванные взаимным влиянием между управлениями, может быть пресечено. Как результат, может быть более надежно пресечено то, что другое управление находится под влиянием выполнения управления амортизацией колебаний подрессоренной части.
Фиг.17 представляет собой вид конфигурации главной части устройства управления амортизацией колебаний согласно модификации второго варианта осуществления. Отметим, что, когда определяется, запрещена или нет амортизация колебаний подрессоренной части, устройство 90 управления амортизацией колебаний согласно второму варианту осуществления выполняет определение на основе рабочего состояния двигателя 5 и напряжения аккумулятора 14. Однако, когда определяется, запрещена или нет амортизация колебаний подрессоренной части, определение может быть выполнено на основе тока аккумулятора 14 и энергии аккумулятора 14, напряжения системы, которое является напряжением, посредством которого напряжение аккумулятора 14 увеличивается, и т.п. вместо напряжения аккумулятора 14. Случай, в котором то, запрещена ли амортизация колебаний подрессоренной части, определяется на основе тока аккумулятора 14, будет пояснен ниже. Когда то, запрещена или нет амортизация колебаний подрессоренной части, определяется на основе тока аккумулятора 14, блок 61 обработки главного ЭБУ 50 размещается вместе с блоком 93 определения тока в качестве средства определения тока аккумулятора, которое определяет, находится или нет ток аккумулятора 14 в предварительно определенном диапазоне, вместо блока 91 определения напряжения.
Фиг.18 представляет собой пояснительный вид, показывающий верхнее/нижнее предельные пороговые значения тока по отношению к температуре аккумулятора. В аккумуляторе 14, поскольку диапазон верхнего/нижнего предельных значений напряжения, при которых аккумулятор 14 подвержен ухудшению эксплуатационных показателей, сужается, когда температура становится более низкой, в устройстве 90 управления амортизацией колебаний согласно второму варианту осуществления, пороговое значение напряжения, когда определяется, запрещена или нет амортизация колебаний подрессоренной части, изменяется за счет температуры аккумулятора 14. В случае тока, диапазон верхнего/нижнего предельных значений тока, при которых аккумулятор 14 подвержен ухудшению эксплуатационных показателей, также сужается, когда температура становится более низкой.
Более конкретно, поскольку электродвигатель 10, который управляется, когда выполняется управление амортизацией колебаний подрессоренной части, формирует не только крутящий момент в направлении привода, но также и крутящий момент в направлении рекуперации, аккумулятор 14 разряжается и заряжается. Соответственно, ток протекает двунаправлено в направлении разряда и направлении заряда к аккумулятору 14 согласно рабочему состоянию. Как описано выше, в верхнем/нижнем предельных значениях тока, который протекает двунаправлено, пороговое значение тока, при котором аккумулятор 14 подвержен ухудшению эксплуатационных показателей, когда ток протекает в одном направлении, устанавливается в качестве верхнего предельного значения, а пороговое значение тока, при котором аккумулятор 14 подвержен ухудшению эксплуатационных показателей, когда ток протекает в другом направлении, устанавливается в качестве нижнего предельного значения. В аккумуляторе 14 диапазон между верхним предельным значением и нижним предельным значением сужается, когда температура становится более низкой.
Следовательно, верхнее предельное значение UA тока, которое является верхним предельным пороговым значением тока, когда определяется, запрещена или нет амортизация колебаний подрессоренной части, становится меньшим, когда температура аккумулятора 14 становится более низкой, как показано на фиг.18, а нижнее предельное значение LA тока, которое является нижним предельным пороговым значением тока, когда предполагается, что верхнее предельное значение UA тока является положительным, становится большим, когда температура аккумулятора 14 становится более низкой, как показано на фиг.18. То есть, нижнее предельное значение LA тока является пороговым значением тока, который протекает в направлении, противоположном направлению протекания тока для верхнего предельного значения UA тока, и диапазон между верхним предельным значением UA тока и нижним предельным значением LA тока сужается, когда температура аккумулятора 14 становится более низкой, и расширяется, когда температура аккумулятора 14 наоборот становится более высокой.
Контроллер 66 амортизации колебаний подрессоренной части запрещает амортизацию колебаний подрессоренной части, когда ток аккумулятора 14 не находится между верхним предельным значением UA тока и нижним предельным значением LA тока, которые изменяются в ответ на температуру. Заметим, что верхнее предельное значение UA тока и нижнее предельное значение LA тока заранее установлены как значения, которые определяются посредством предоставления верхнего/нижнего предельных значений тока, при которых аккумулятор 14 подвержен ухудшению эксплуатационных показателей, с допуском и сохранены в блоке 70 хранения данных главного ЭБУ 50.
Фиг.19 представляет собой блок-схему последовательности операций, показывающую процедуру обработки устройства управления амортизацией колебаний согласно модификации второго варианта осуществления. Как описано выше, то, запрещена или нет амортизация колебаний подрессоренной части, определяется на основе рабочего состояния двигателя 5 и тока аккумулятора 14, сначала то, является ли это моментом времени, в который двигатель запускается или двигатель останавливается, определяется блоком 67 определения рабочего состояния двигателя, предусмотренным в блоке 61 обработки главного ЭБУ 50 (этап ST101). Когда определяется посредством определения в блоке 67 определения рабочего состояния двигателя (этап ST101), что это - время, в которое двигатель запускается или двигатель останавливается, далее получатся ток Ab аккумулятора (этап ST121). Ток Ab аккумулятора получается блоком 87 получения тока, предусмотренным в блоке 85 обработки ЭБУ 53 аккумулятора.
Далее, определяется, устанавливается ли соотношение "нижнее предельное значение LA тока < ток Ab аккумулятора < верхнее предельное значение UA тока" (этап ST122). Определение выполняется блоком 93 определения тока, предусмотренным в блоке 61 обработки главного ЭБУ 50, и блок 93 определения тока выполняет определение, сравнивая ток Ab аккумулятора, который получен блоком 87 получения тока, с верхним предельным значением UA тока и нижним предельным значением LA тока, которые сохранены в блоке 70 хранения данных главного ЭБУ 50.
Более конкретно, соотношения верхнего предельного значения UA тока и нижнего предельного значения LA тока с температурой аккумулятора 14 предварительно устанавливаются, как показано на фиг.18, и сохраняются в блоке 70 хранения данных главного ЭБУ 50. Дополнительно, когда определение выполняется блоком 93 определения тока, температура аккумулятора 14 дополнительно получается блоком 92 получения температуры аккумулятора, предусмотренным в блоке 85 обработки ЭБУ 53 аккумулятора, в дополнение к току Ab аккумулятора. Блок 93 определения тока вычисляет верхнее предельное значение UA тока и нижнее предельное значение LA тока при текущей температуре аккумулятора 14 посредством соотношений верхнего предельного значения UA тока и нижнего предельного значения LA тока с температурой аккумулятора 14, сохраненных в блоке 70 хранения данных главного ЭБУ 50, и температуры аккумулятора 14, полученной блоком 92 получения температуры аккумулятора, и сравнивает вычисленное верхнее предельное значение UA тока и нижнее предельное значение LA тока с током Ab аккумулятора, полученным блоком 87 получения тока. Блок 93 определения тока, определяет, установлено или нет соотношение "нижнее предельное значение LA тока < ток Ab аккумулятора < верхнее предельное значение UA тока", посредством сравнения.
Когда определяется, что соотношение "нижнее предельное значение LA тока < ток Ab аккумулятора < верхнее предельное значение UA тока" не устанавливается, то есть, когда определяется, что устанавливается соотношение "ток Ab аккумулятора ≥ верхнее предельное значение UA тока", или когда определяется, что устанавливается соотношение "ток Ab аккумулятора ≤ нижнее предельное значение LA тока", посредством определения в блоке 93 определения тока (этап ST122), амортизация колебаний подрессоренной части запрещается (этап ST102). Амортизация колебаний подрессоренной части запрещается контроллером 66 амортизации колебаний подрессоренной части, предусмотренным в блоке 61 обработки главного ЭБУ 50. Когда амортизация колебаний подрессоренной части запрещается контроллером 66 амортизации колебаний подрессоренной части, процесс пропускает процедуру обработки.
В отличие от этого, когда определяется посредством определения (этап ST101) в блоке 67 определения рабочего состояния двигателя, что это не является моментом времени, в который двигатель запускается и двигатель останавливается, или даже когда это является моментом времени, в который двигатель запускается и двигатель останавливается, амортизация колебаний подрессоренной части выполняется (этап ST103), когда определяется посредством определения в блоке 93 определения тока (этап ST112), что "нижнее предельное значение LV тока < ток Ab аккумулятора < верхнее предельное значение UA тока". То есть, даже когда двигатель запускается и двигатель останавливается, контроллер 66 амортизации колебаний подрессоренной части выполняет амортизацию колебаний подрессоренной части в ответ на колебание подрессоренной части, когда ток Ab аккумулятора находится между верхним предельным значением UA тока и нижним предельным значением LA тока.
Как описано выше, аккумулятор 14, который является источником энергии, подаваемой к электродвигателю 10, когда выполняется амортизация колебаний подрессоренной части, не подвержен ухудшению эксплуатационных показателей, даже когда ток Ab аккумулятора находится между верхним предельным значением UA тока и нижним предельным значением LA тока аналогично случаю, когда напряжение Vb аккумулятора находится между верхним предельным значением UV напряжения и нижним предельным значением LV напряжения. Следовательно, даже когда определяется, что это является моментом времени, когда двигатель 5 запускается или останавливается, амортизация колебаний подрессоренной части может выполняться, в то же время пресекая ухудшение эксплуатационных показателей аккумулятора 14, когда ток Ab аккумулятора находится между верхним предельным значением UA тока и нижним предельным значением LA тока, и период, в течение которого амортизация колебаний подрессоренной части выполняется, может быть увеличен. Как результат, колебание подрессоренной части может более надежно подавляться, в то же время пресекая влияние выполнения управления амортизацией колебаний подрессоренной части на другое управление.
Дополнительно, пороговое значение тока, при котором аккумулятор 14 подвержен ухудшению эксплуатационных показателей, тем самым ток аккумулятора 14 становится чрезвычайно высоким или становится чрезвычайно низким, отличается в зависимости от температуры аналогично пороговому значению напряжения, при котором аккумулятор 14 подвержен ухудшению эксплуатационных показателей. Следовательно, то, находится или нет аккумулятор 14 в состоянии, в котором он подвержен ухудшению эксплуатационных показателей, может быть определено более точно посредством изменения верхнего предельного значения UA тока и нижнего предельного значения LA тока, которые являются пороговыми значениями, когда определяется, запрещена или нет амортизация колебаний подрессоренной части, с помощью тока аккумулятора 14 в момент времени, когда двигатель 5 запускается или останавливается, в ответ на температуру аккумулятора 14. Соответственно, когда определяется, что это является моментом времени, в который двигатель 5 запускается или останавливается, может быть более правильно определено состояние, в котором аккумулятор 14 подвержен ухудшению эксплуатационных показателей, и период, в течение которого амортизация колебаний подрессоренной части выполняется, может быть увеличен посредством выполнения амортизации колебаний подрессоренной части, когда аккумулятор 14 находится в состоянии, в котором он не подвержен ухудшению эксплуатационных показателей. Как результат, колебание подрессоренной части может более надежно подавляться, в то же время пресекая влияние выполнения управления амортизацией колебаний подрессоренной части на другое управление.
Фиг.20 представляет собой вид конфигурации главной части устройства управления амортизацией колебаний согласно модификации шестого варианта осуществления. Дополнительно, в устройстве 130 управления амортизацией колебаний согласно шестому варианту осуществления, чтобы подавлять взаимное влияние между управлением амортизацией колебаний подрессоренной части и управлением с обратной связью величиной заряда/разряда, хотя величина управляющего воздействия при амортизации колебаний подрессоренной части становится небольшой, в то время как выполняется управление с обратной связью по величине заряда/разряда, взаимное влияние управлений может подавляться посредством создания величины управляющего воздействия при управлении с обратной связью по величине заряда/разряда, в то время как наоборот выполняется управление амортизацией колебаний подрессоренной части. В таком случае, блок 61 обработки главного ЭБУ 50 размещается вместе с блоком 132 определения состояния выполнения управления амортизацией колебаний подрессоренной части в качестве средства определения состояния выполнения управления амортизацией колебаний подрессоренной части, которое определяет состояние выполнения управления амортизацией колебаний подрессоренной части, вместо блока 131 определения состояния выполнения управления с обратной связью по величине заряда/разряда. Дополнительно, блок 61 обработки главного ЭБУ 50 размещается вместе с блоком 133 вычисления величины управляющего воздействия по обратной связи на величину заряда/разряда в качестве средства вычисления величины управляющего воздействия по обратной связи на величину заряда/разряда, которое вычисляет величину управляющего воздействия, когда выполняется управление с обратной связью по величине заряда/разряда.
Фиг.21 представляет собой блок-схему последовательности операций, показывающую процедуру обработки устройства управления амортизацией колебаний согласно модификации шестого варианта осуществления. Как описано выше, когда взаимное влияние управлений подавляется, делая небольшой величину управляющего воздействия при управлении с обратной связью по величине заряда/разряда, пока выполняется управление амортизацией колебаний подрессоренной части, сначала вычисляется состояние выполнения амортизации колебаний подрессоренной части (этап ST511). Вычисление выполняется контроллером 66 амортизации колебаний подрессоренной части, предусмотренным в блоке 61 обработки главного ЭБУ 50. То есть, контроллер 66 амортизации колебаний подрессоренной части оценивает колебание подрессоренной части на основе результата обнаружения датчика 31 степени открытия акселератора, результата обнаружения датчика 36 скорости колеса и т.п. и вычисляет состояние выполнения амортизации колебаний подрессоренной части в ответ на оцененное колебание подрессоренной части. В частности, контроллер 66 амортизации колебаний подрессоренной части вычисляет, например, крутящий момент амортизации колебаний подрессоренной части в качестве состояния выполнения амортизации колебаний подрессоренной части.
Далее, определяется, выполняется или нет амортизация колебаний подрессоренной части (этап ST512). Определение выполняется блоком 132 определения состояния выполнения управления амортизацией колебаний подрессоренной части, предусмотренным в блоке 61 обработки главного ЭБУ 50. Блок 132 определения состояния выполнения управления амортизацией колебаний подрессоренной части определяет, выполняется или нет амортизация колебаний подрессоренной части контроллером 66 амортизации колебаний подрессоренной части, посредством состояния выполнения вычисления амортизации колебаний подрессоренной части контроллером 66 амортизации колебаний подрессоренной части.
Когда определяется, что амортизация колебаний подрессоренной части выполняется, посредством определения в блоке 132 определения состояния выполнения управления амортизацией колебаний подрессоренной части (этап ST512), коэффициент усиления управления с обратной связью по величине заряда/разряда становится меньше 1 (этап ST513). Как описано выше, когда коэффициент усиления управления с обратной связью по величине заряда/разряда, который является коэффициентом усиления, когда выполняется управление с обратной связью по величине заряда/разряда, становится меньше 1, коэффициент усиления определяется блоком 133 вычисления величины управляющего воздействия по обратной связи на величину заряда/разряда, предусмотренным в блоке 61 обработки главного ЭБУ 50. Коэффициент усиления управления с обратной связью по величине заряда/разряда, который определяется блоком 133 вычисления величины управляющего воздействия по обратной связи на величину заряда/разряда, определяется таким образом, что коэффициент усиления заранее устанавливается в значение, меньше 1, и сохраняется в блоке 70 хранения данных главного ЭБУ 50, и блок 133 вычисления величины управляющего воздействия по обратной связи на величину заряда/разряда определяет, коэффициент усиления управления с обратной связью по величине заряда/разряда, считывая коэффициент усиления, сохраненный в блоке 70 хранения данных.
Далее, конечная величина обратной связи на величину заряда/разряда вычисляется посредством умножения величины обратной связи на величину заряда/разряда на коэффициент усиления (этап ST514). Вычисление выполняется блоком 133 вычисления величины управляющего воздействия по обратной связи на величину заряда/разряда. Блок 133 вычисления величины управляющего воздействия по обратной связи на величину заряда/разряда умножает величину обратной связи на величину заряда/разряда, которая является величиной управляющего воздействия, когда управление с обратной связью по величине заряда/разряда выполняется посредством ЭБУ 53 аккумулятора и главного ЭБУ 50, на коэффициент усиления управления с обратной связью по величине заряда/разряда, который определяется как значение, меньше 1. То есть, блок 133 вычисления величины управляющего воздействия по обратной связи на величину заряда/разряда вычисляет конечную величину обратной связи на величину заряда/разряда посредством умножения количества энергии, сгенерированной генератором 11, и рекуперативного количества при торможении и дополнительно величины обратной связи на величину заряда/разряда, которая является величиной управляющего воздействия, когда величина разряда аккумулятора 14 управляется посредством коэффициента усиления управления с обратной связью по величине заряда/разряда в ответ на величину заряда и энергию аккумулятора 14. С помощью такой операции величина обратной связи на величину заряда/разряда становится небольшим значением, и ЭБУ 53 аккумулятора и главный ЭБУ 50 выполняют управление с обратной связью по величине заряда/разряда посредством конечной величины обратной связи на величину заряда/разряда.
В отличие от этого, когда определяется, что амортизация колебаний подрессоренной части не выполняется, посредством определения в блоке 132 определения состояния выполнения управления амортизацией колебаний подрессоренной части (этап ST512), коэффициент усиления управления с обратной связью по величине заряда/разряда становится равным 1 (этап ST515). Далее, блок 133 вычисления величины управляющего воздействия по обратной связи на величину заряда/разряда вычисляет конечную величину обратной связи на величину заряда/разряда (этап ST514), умножая величину обратной связи на величину заряда/разряда на коэффициент усиления. То есть, конечная величина обратной связи на величину заряда/разряда становится величиной управляющего воздействия в ответ на текущую величину заряда и мощность аккумулятора 14 посредством умножения величины обратной связи на величину заряда/разряда, которая является величиной управляющего воздействия, когда выполняется управление с обратной связью по величине заряда/разряда, на коэффициент усиления управления с обратной связью по величине заряда/разряда, значение которого становится равным 1 блоком 133 вычисления величины управляющего воздействия по обратной связи на величину заряда/разряда. Когда управление с обратной связью по величине заряда/разряда выполняется, управление может выполняться, будучи управляемым посредством конечной величины обратной связи на величину заряда/разряда без уменьшения величины обратной связи на величину заряда/разряда.
Как описано выше, когда взаимное влияние между управлением амортизацией колебаний подрессоренной части и управлением с обратной связью по величине заряда/разряда подавляется, взаимное влияние управлений также может подавляться, делая коэффициент усиления управления с обратной связью по величине заряда/разряда меньше 1, в то время как выполняется управление амортизацией колебаний подрессоренной части, и ограничивая управление с обратной связью по величине заряда/разряда. С помощью такой операции, которая формируется посредством взаимного влияния между управлением амортизацией колебаний подрессоренной части и управлением с обратной связью по величине заряда/разряда, может быть пресечен такой недостаток, как колебание и т.п. Как результат, может быть пресечено то, что другое управление находится под влиянием выполнения управления амортизацией колебаний подрессоренной части.
Дополнительно, в устройстве 110 управления амортизацией колебаний согласно четвертому варианту осуществления определение того, запрещена или нет амортизация колебаний подрессоренной части, выполняется на основе температуры аккумулятора 14. Однако, когда температура аккумулятора 14 не может быть обнаружена, другая температура может быть использована вместо температуры аккумулятора 14, и, например, температуры охлаждающей жидкости двигателя 5 и инвертера 13, температура всасываемого воздуха, температура окружающего воздуха и шум масла и т.п. могут быть использованы в качестве замещений. Когда температура увеличивается посредством выполнения амортизации колебаний подрессоренной части путем управления электродвигателем 10, не только ухудшаются эксплуатационные показатели аккумулятора 14, но также температура инвертера 13, который подает энергию электродвигателю 10, также увеличивается. Дополнительно, когда энергия аккумулятора 14 потребляется в момент времени, когда электродвигатель 10 приводится в действие при управлении амортизацией колебаний подрессоренной части, поскольку нагрузка на двигатель 5 также увеличивается, чтобы заряжать израсходованную энергию, температуры охлаждающей жидкости и масла двигателя 5 также увеличиваются. То есть, когда амортизация колебаний подрессоренной части выполняется посредством управления электродвигателем 10, поскольку нагрузки на инвертер 13, двигатель 5 и т.п. увеличиваются, температуры охлаждающей жидкости инвертера 13, двигателя 5 и т.п. увеличиваются. Соответственно, когда температуры охлаждающей жидкости и т.п. высокие, может быть определено, что нагрузки на двигатель 5, инвертер 13 и т.п. находятся в состоянии больших нагрузок. Таким образом, срок эксплуатации двигателя 5 и т.п. может быть обеспечен посредством запрещения амортизации колебаний подрессоренной части, когда температуры охлаждающей жидкости двигателя 5 и инвертера 13, температура всасываемого воздуха, температура наружного воздуха, шум масла и т.п. равны или больше, чем предварительно определенные пороговые значения. Как результат, может не допускаться то, что другое управление находится под влиянием выполнения управления амортизацией колебаний подрессоренной части.
Дополнительно, в устройствах 2, 90, 100, 110, 120 управления амортизацией колебаний согласно первому-пятому вариантам осуществления амортизация колебаний подрессоренной части запрещается в состоянии, в котором существует вероятность того, что другое управление находится под влиянием выполнения управления амортизацией колебаний подрессоренной части. Однако, в таком состоянии амортизация колебаний подрессоренной части может ограничиваться вместо запрещения амортизации колебаний подрессоренной части. При ограничении коэффициент усиления управления амортизацией колебаний подрессоренной части может быть установлен меньше 1, аналогично, например, тому, что управление амортизацией колебаний подрессоренной части ограничивается в устройстве 130 управления амортизацией колебаний согласно шестому варианту осуществления, делая коэффициент GC усиления управления амортизацией колебаний подрессоренной части меньше 1, в то время как выполняется управление с обратной связью по величине заряда/разряда, верхнее предельное значение может быть установлено в величину управляющего воздействия управления амортизацией колебаний подрессоренной части, или энергия, используемая в управлении амортизацией колебаний подрессоренной части, может быть ограничена.
Аналогично, также в устройстве 130 управления амортизацией колебаний согласно шестому варианту осуществления амортизация колебаний подрессоренной части может ограничиваться посредством установки верхнего предельного значения в величину управляющего воздействия амортизации колебаний подрессоренной части и ограничения энергии, используемой в амортизации колебаний подрессоренной части вместо ограничения амортизации колебаний подрессоренной части, делая коэффициент GC усиления управления амортизацией колебаний подрессоренной части меньше 1. Дополнительно, в устройстве 130 управления амортизацией колебаний согласно шестому варианту осуществления, хотя амортизация колебаний подрессоренной части ограничивается, в то время как выполняется управление с обратной связью по величине заряда/разряда, амортизация колебаний подрессоренной части может быть запрещена, пока выполняется управление с обратной связью по величине заряда/разряда.
Как описано выше, в состоянии, в котором существует вероятность того, что трудно должным образом выполнять амортизацию колебаний подрессоренной части, в состоянии, в котором аккумулятор 14 подвержен ухудшению эксплуатационных показателей, и дополнительно в состоянии, в котором существует вероятность того, что управление амортизацией колебаний подрессоренной части оказывает влияние на другое управление, амортизация колебаний подрессоренной части, которая выполняется посредством управления крутящим моментом электродвигателя 10, может ограничиваться, будучи подвергаемой ограничению, включающему в себя запрещение в ответ на состояние аккумулятора 14, такое как напряжение, температура и т.п. аккумулятора 14, который предоставляет энергию электродвигателю 10, или на состояние управления, такое как управление с обратной связью по величине заряда/разряда и т.п., которое оказывает влияние на энергию аккумулятора 14. С помощью такой операции, поскольку управление амортизацией колебаний подрессоренной части может выполняться в состоянии, в котором управление идет на компромисс при необходимости, управление амортизацией колебаний подрессоренной части и другое управление могут должным образом выполняться. Как результат, может быть пресечено то, что другое управление находится под влиянием выполнения управления амортизацией колебаний подрессоренной части.
Промышленная применимость
Как описано выше, устройство управления амортизацией колебаний согласно настоящему изобретению полезно для устройства управления амортизацией колебаний, которое выполняет управление амортизацией колебаний подрессоренной части, и, в частности, подходит, когда транспортное средство, которое выполняет управление амортизацией колебаний подрессоренной части, является гибридным транспортным средством.
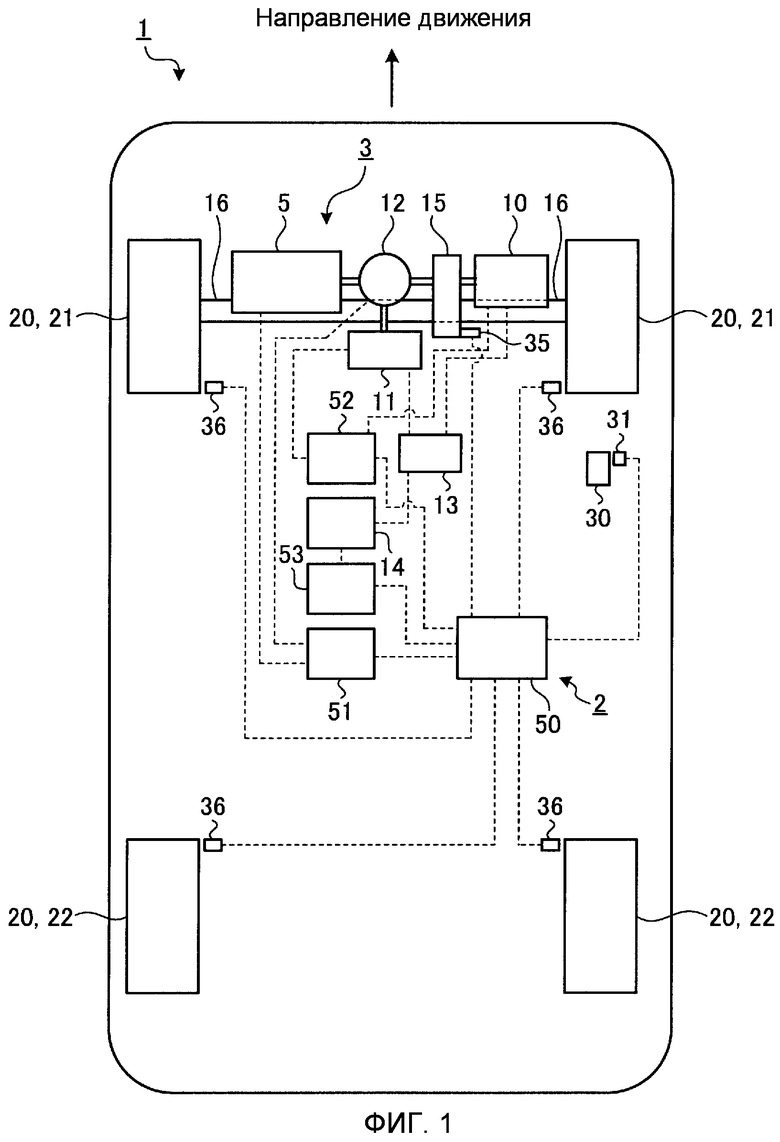
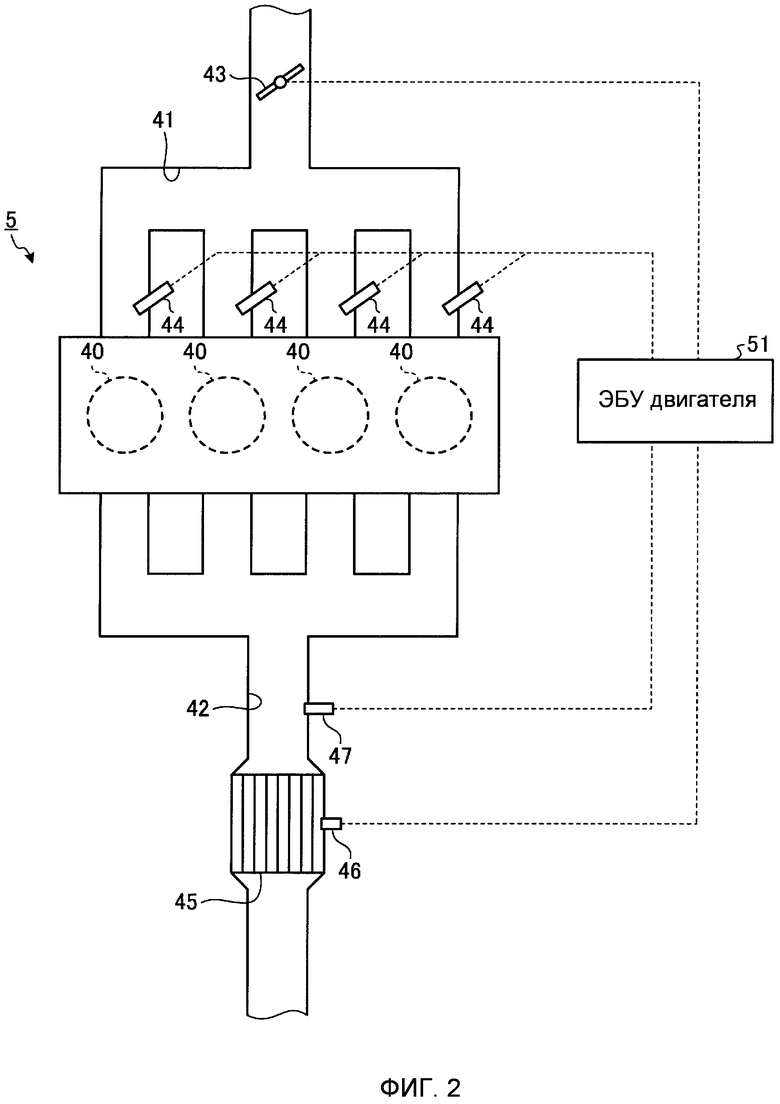
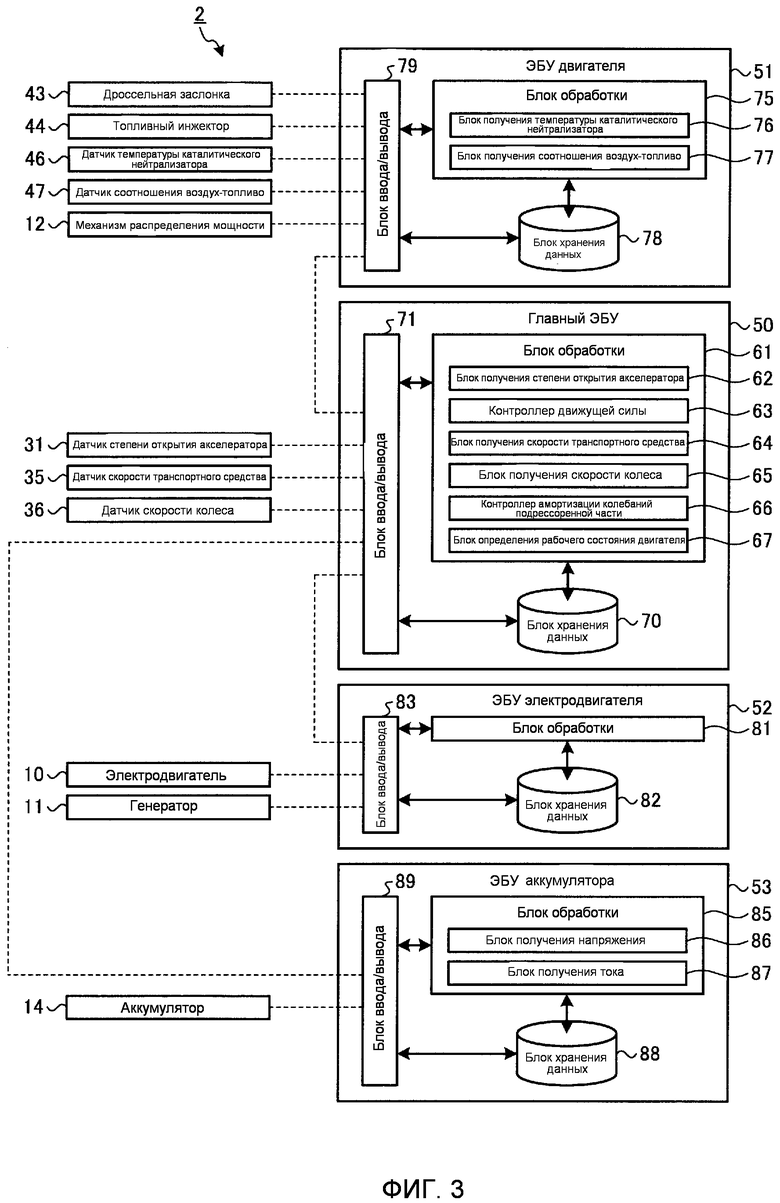
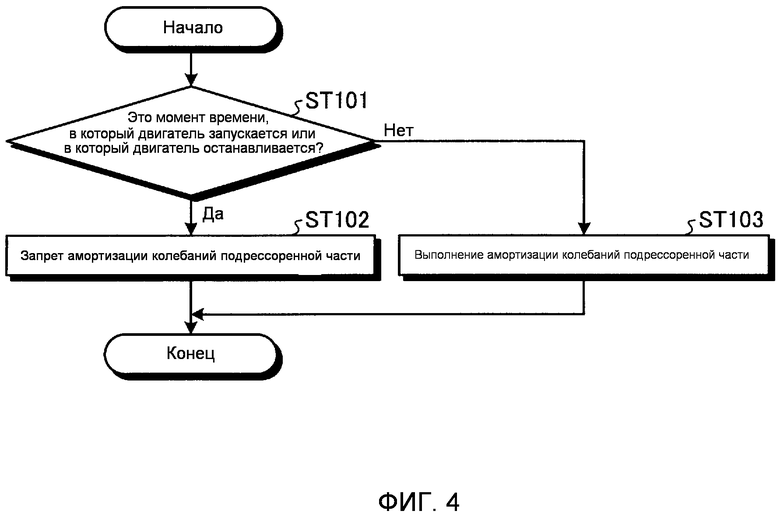
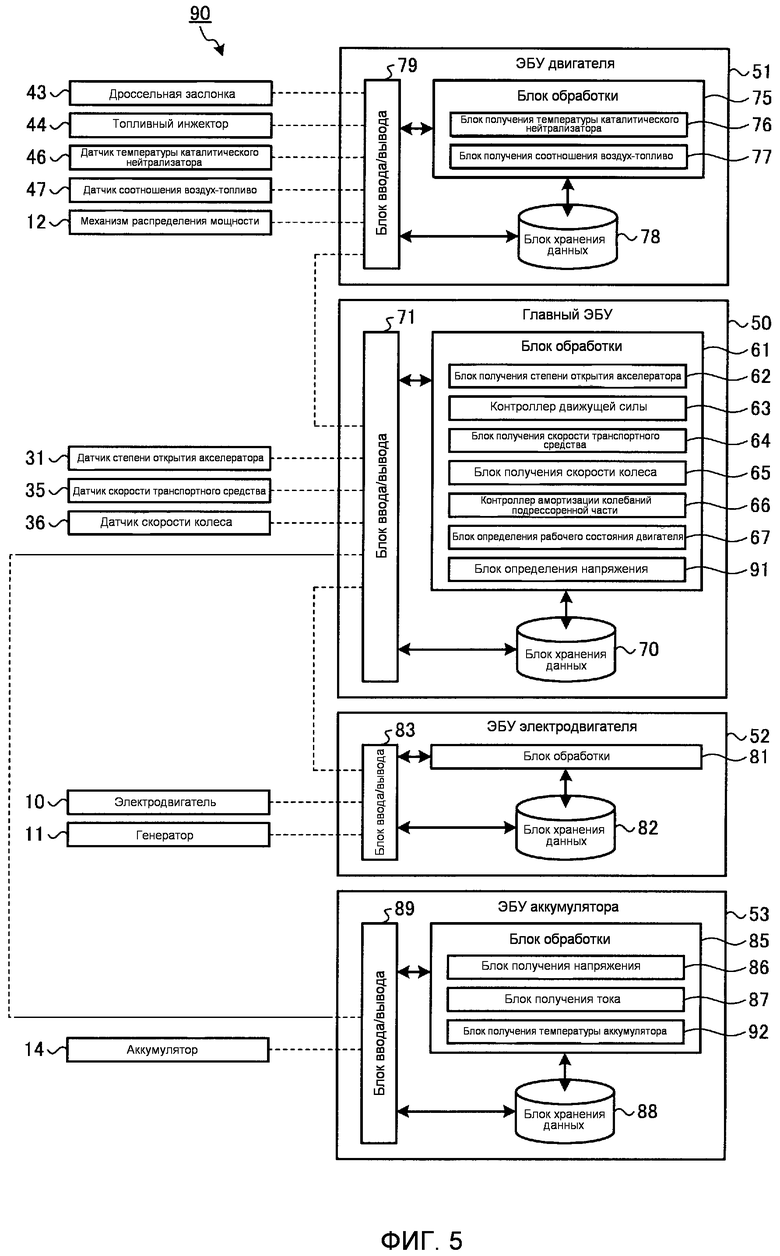
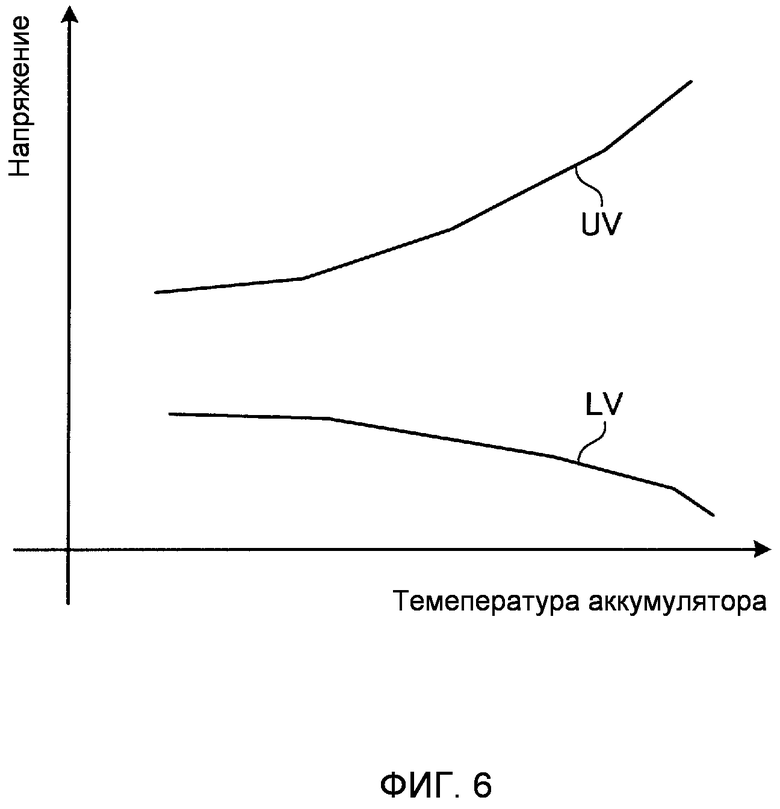
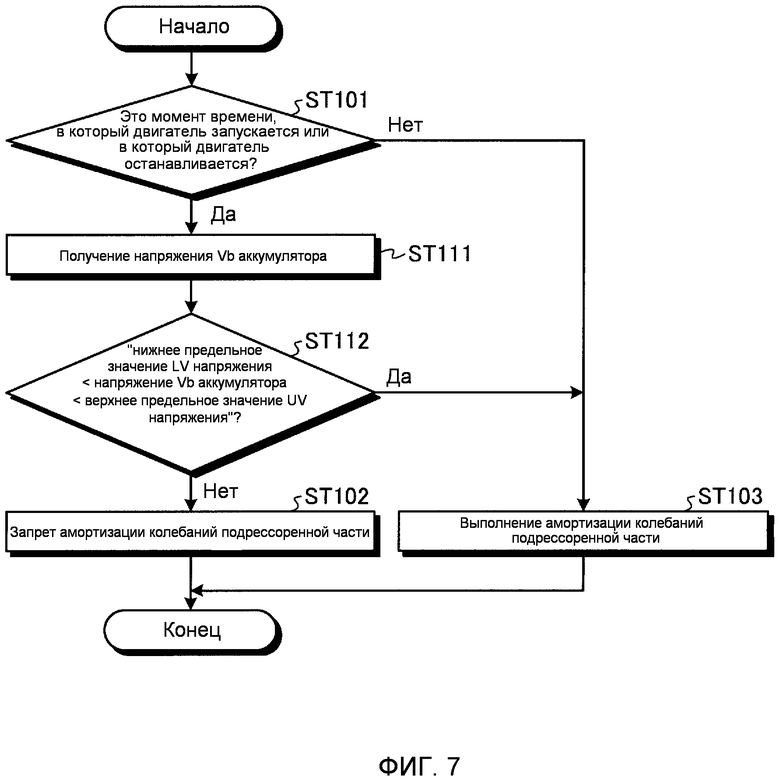
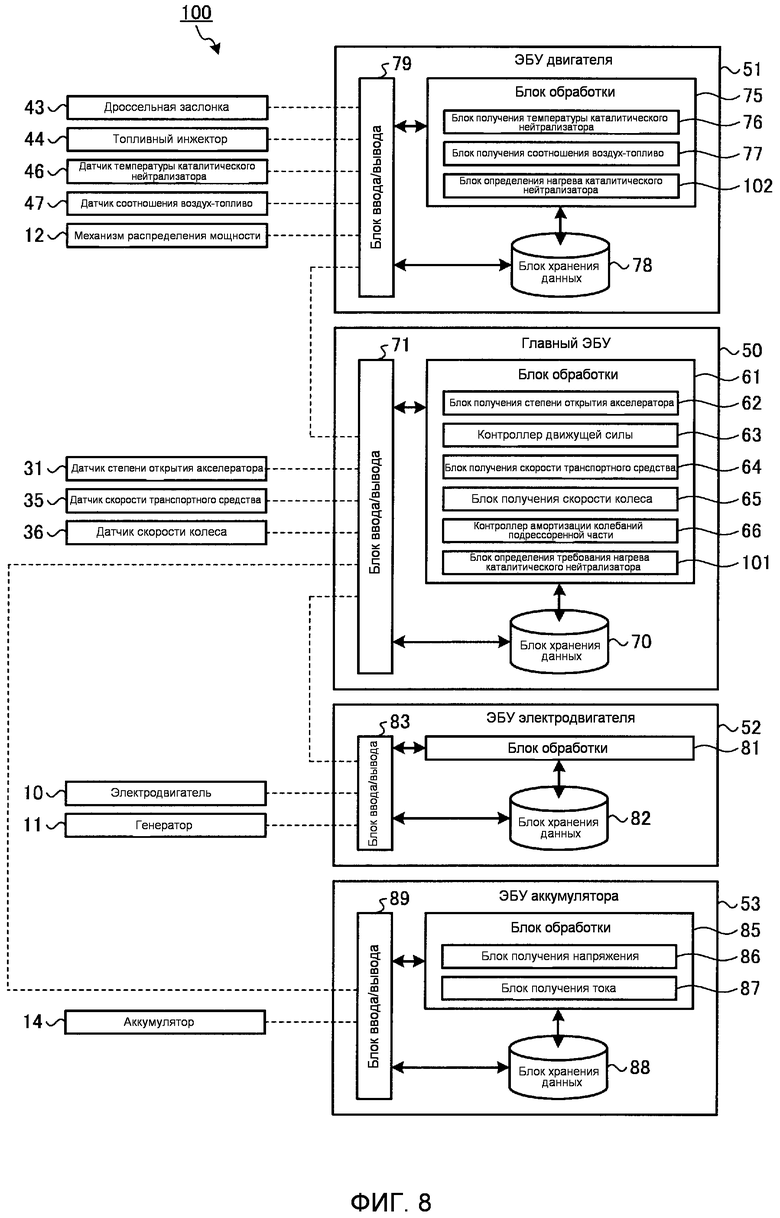
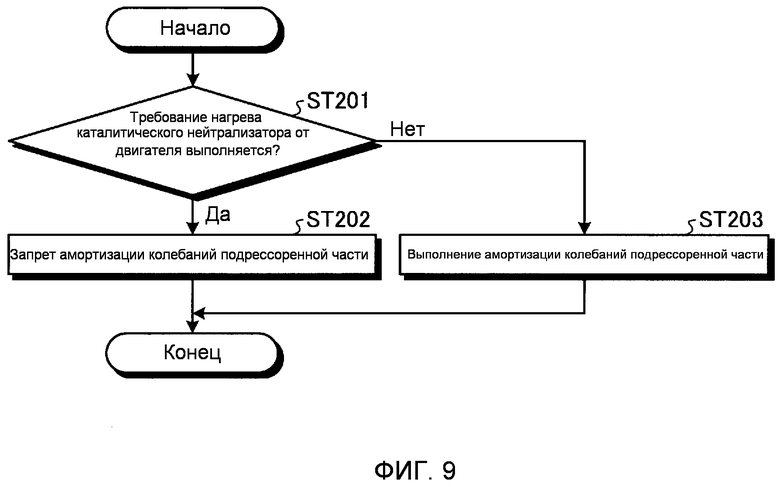
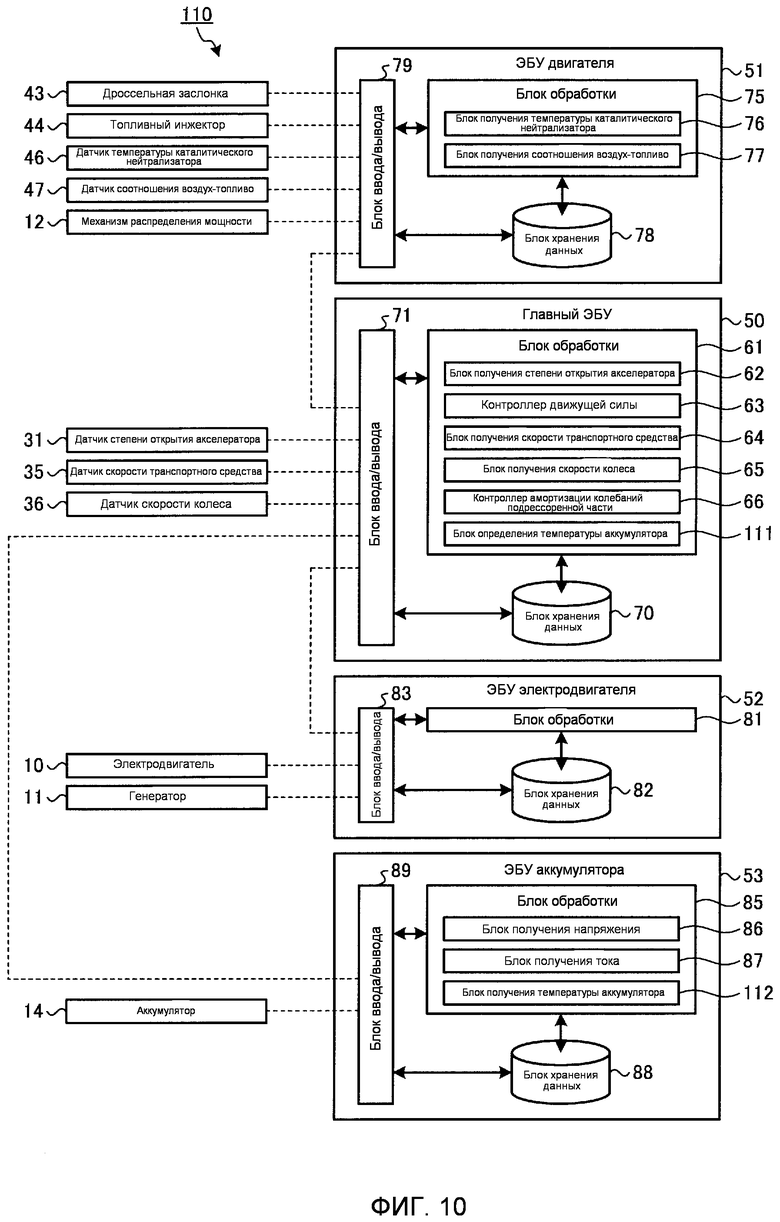
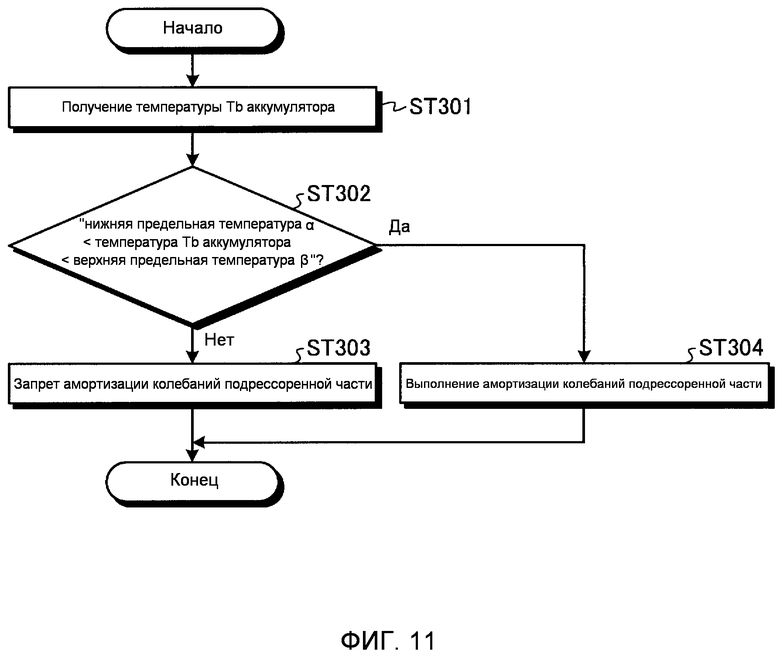
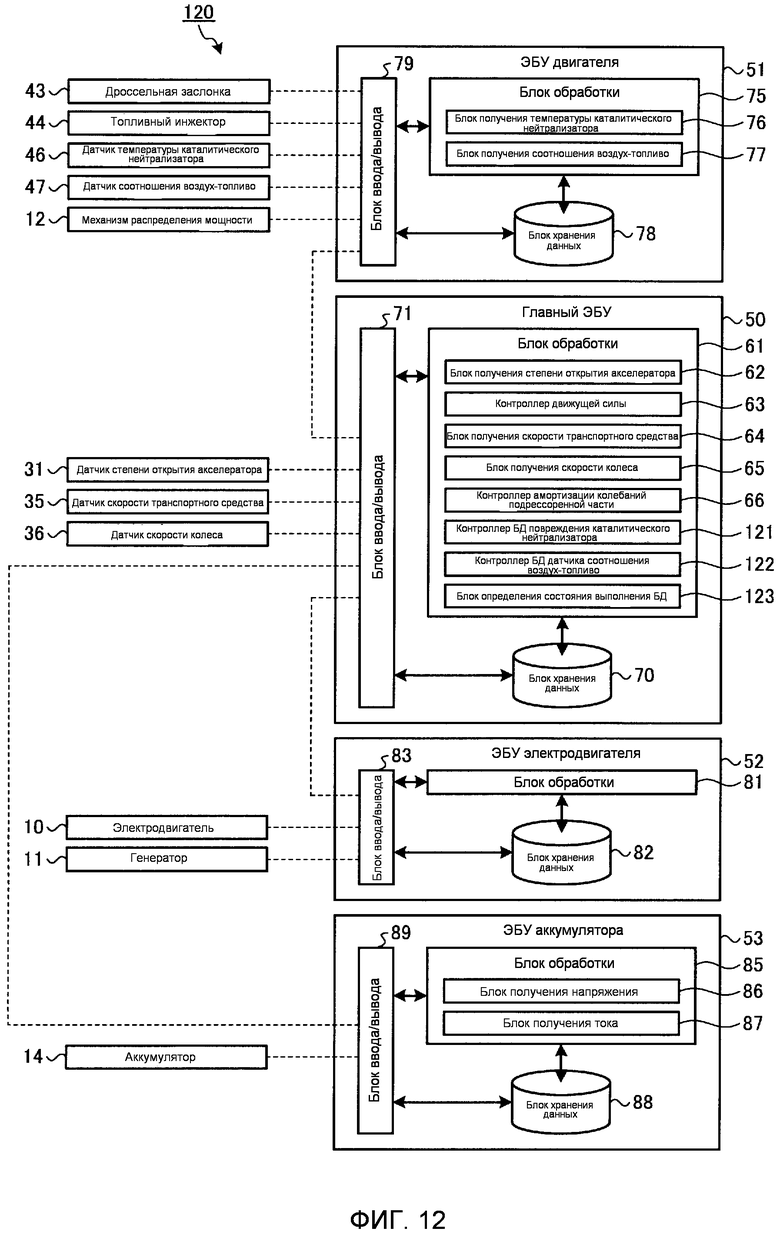
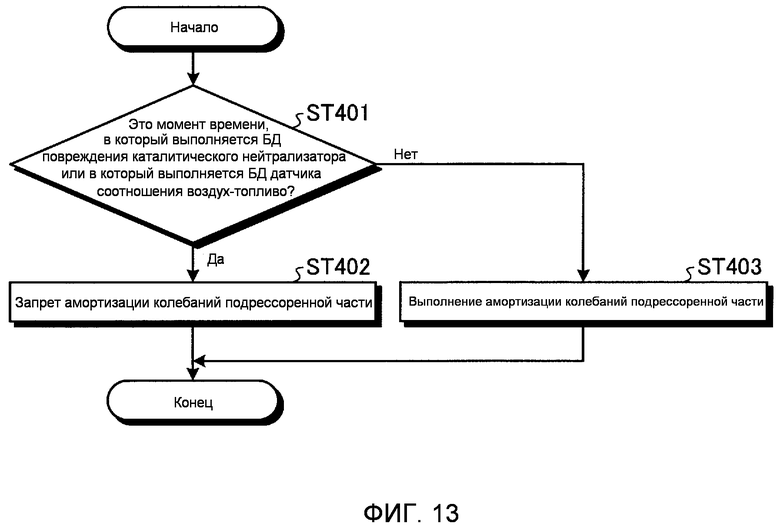
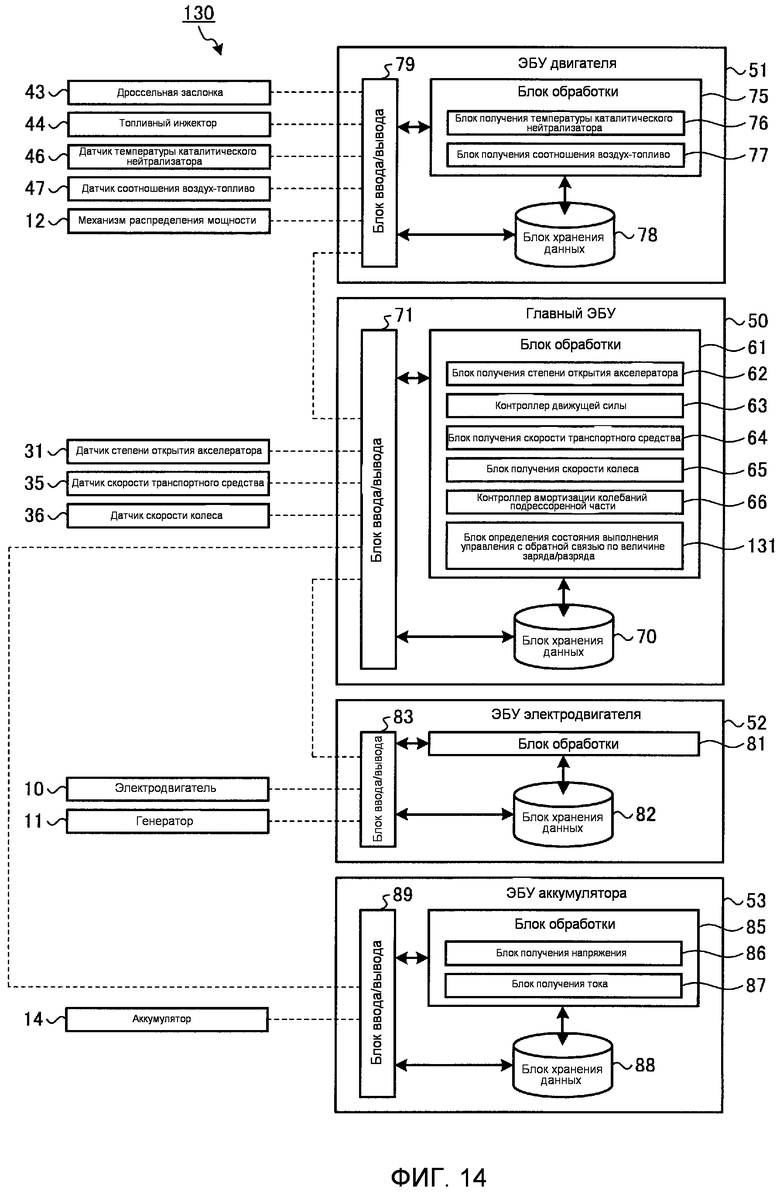
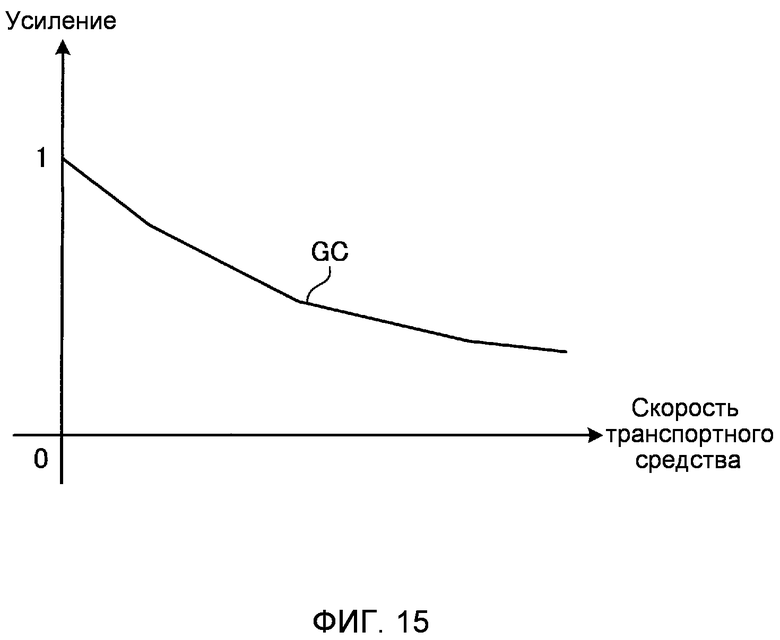
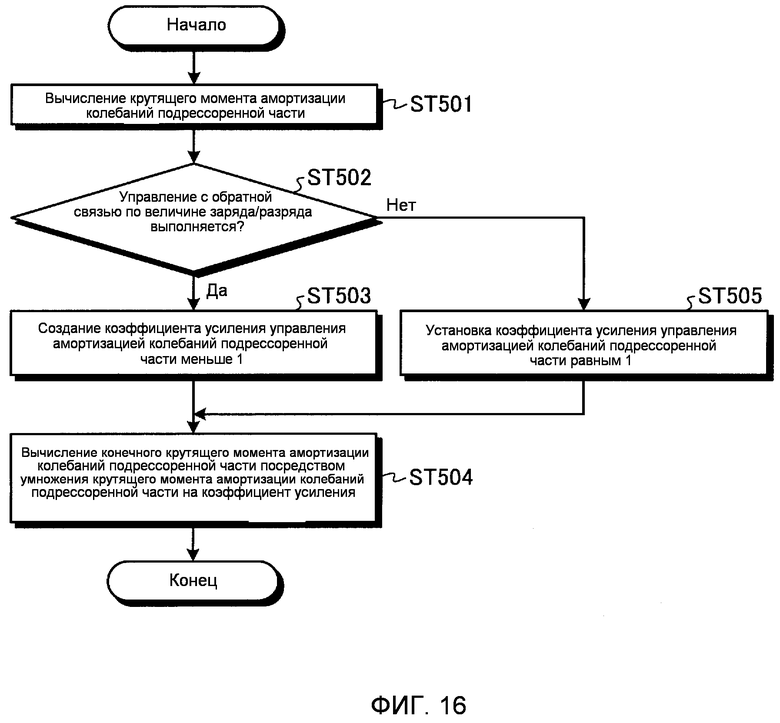
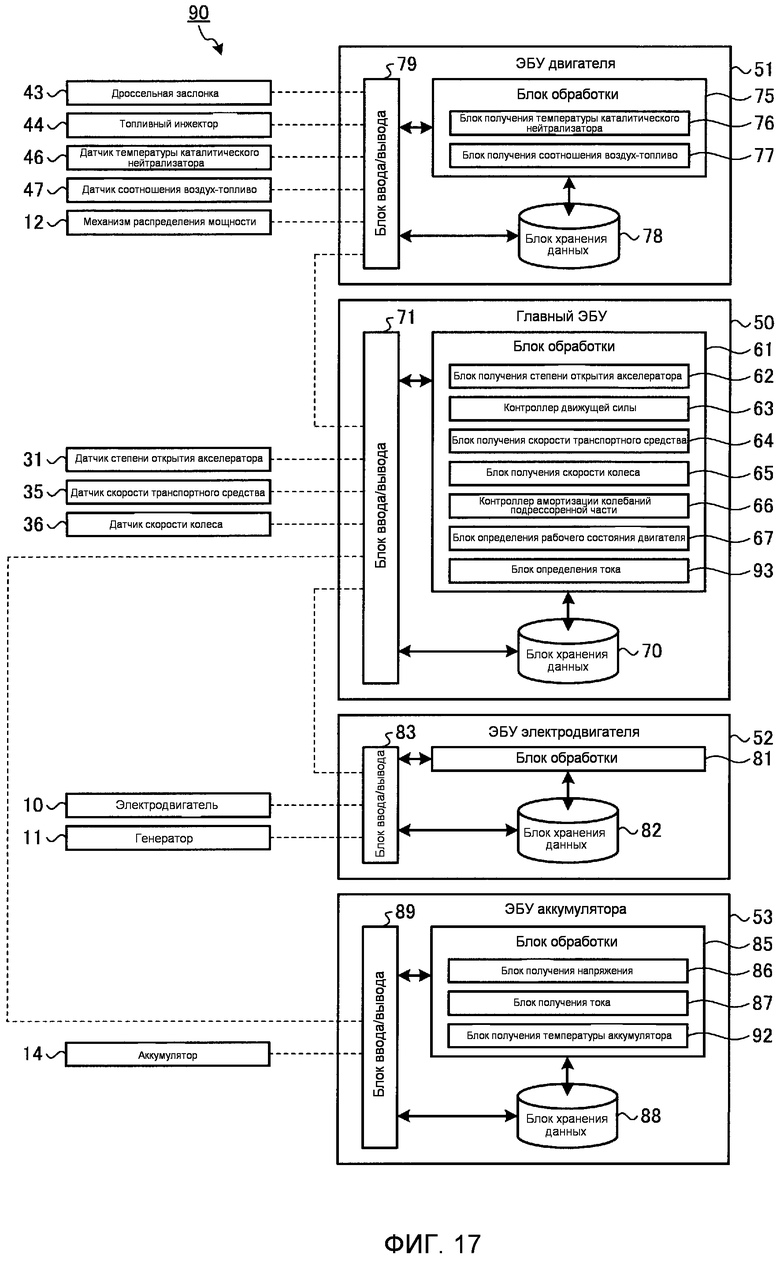
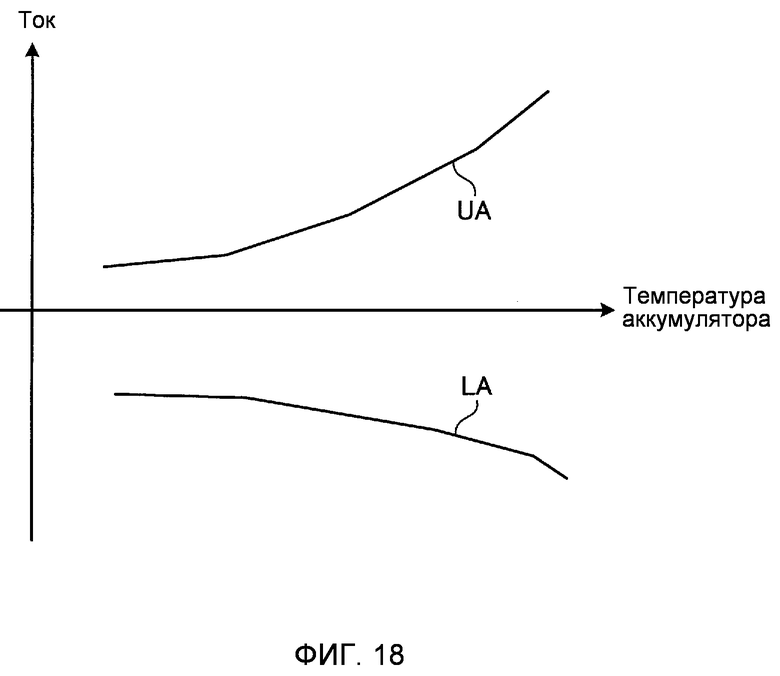
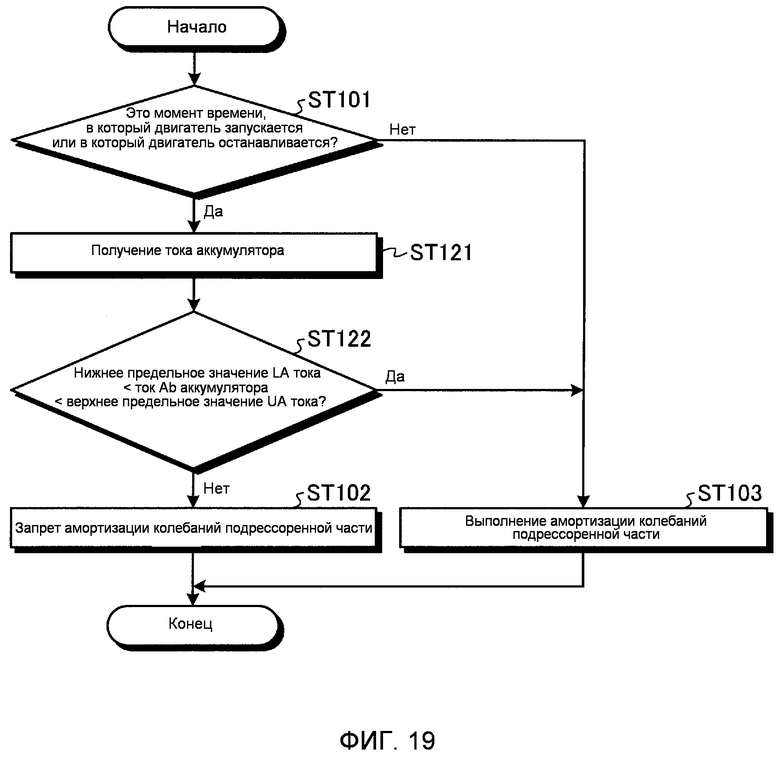
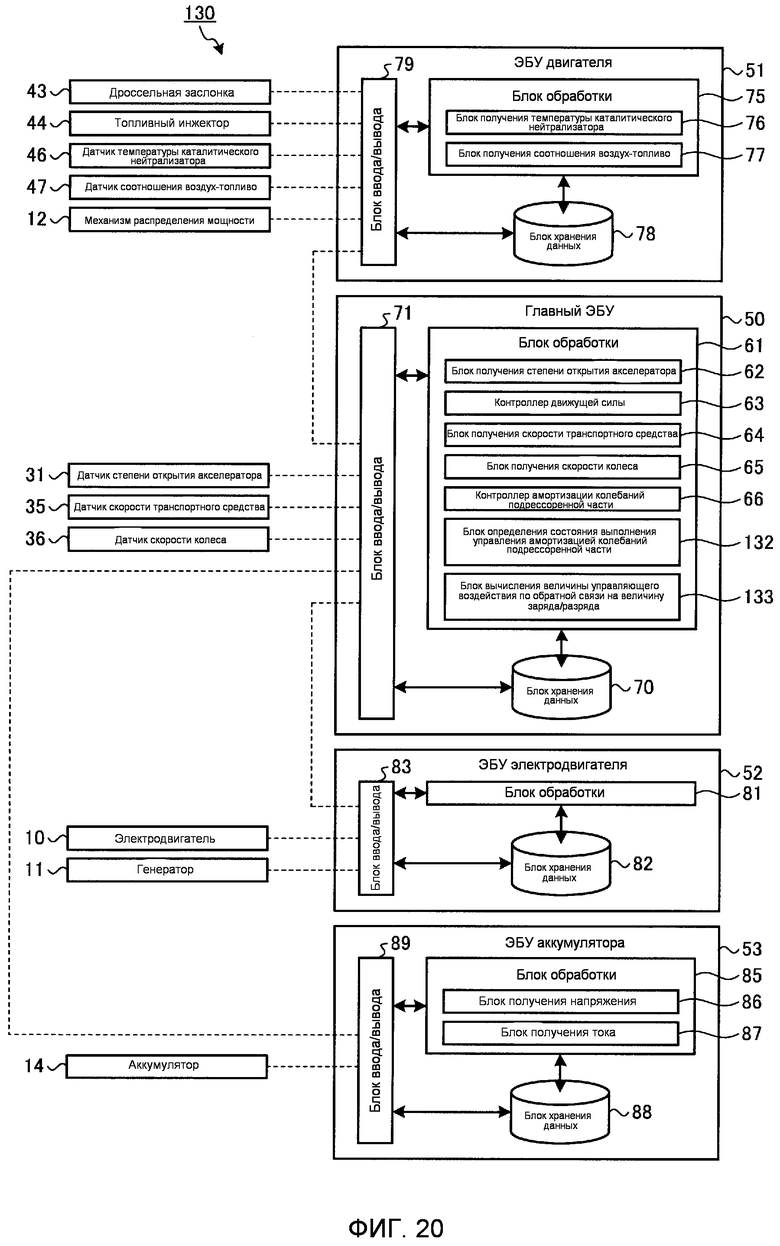
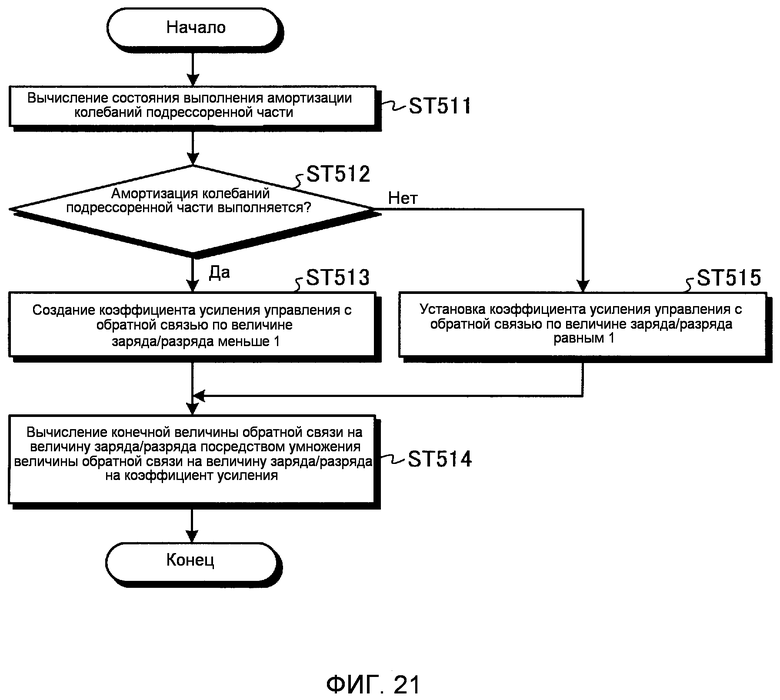
Изобретение относится к устройству управления амортизацией колебаний подрессоренной части транспортного средства. Устройство управления амортизацией осуществляет управление посредством управления крутящим моментом электродвигателя. Амортизация колебаний подрессоренной части ограничивается в ответ на состояние аккумулятора. Амортизация колебаний подрессоренной части ограничивается, когда двигатель внутреннего сгорания запускается или останавливается, и когда напряжение аккумулятора равно или превышает верхнее предельное пороговое значение, или равно или меньше нижнего предельного порогового значения. Технический результат заключается в обеспечении устойчивого управления амортизацией колебаний и иного управления в зависимости от энергии аккумулятора. 8 з.п. ф-лы, 21 ил.
1. Устройство (2, 90, 100, 110, 120, 130) управления амортизацией колебаний для подавления колебания подрессоренной части, формируемого в транспортном средстве (1) входным воздействием от поверхности дороги на колеса (20, 21, 22), предусмотренные на транспортном средстве (1), посредством управления движущей силой транспортного средства (1), в котором амортизация колебаний подрессоренной части в качестве подавления колебания подрессоренной части выполняется посредством управления крутящим моментом электродвигателя (10), размещенного в качестве источника энергии, когда, по меньшей мере, транспортное средство (1) движется, и амортизация колебаний подрессоренной части, которая выполняется посредством управления крутящим моментом электродвигателя (10), ограничивается в ответ на состояние аккумулятора (14), который подает энергию к электродвигателю (10), или на состояние управления, которое оказывает влияние на энергию аккумулятора (14), при этом транспортное средство (1) дополнительно включает в себя двигатель (5) внутреннего сгорания в качестве источника энергии при движении, причем амортизация колебаний подрессоренной части ограничивается в момент времени, в который двигатель (5) внутреннего сгорания запускается или останавливается, а также когда напряжение аккумулятора (14) равно или превышает верхнее предельное пороговое значение, или равно или меньше нижнего предельного порогового значения.
2. Устройство (2, 90, 100, 110, 120, 130) по п.1, в котором верхнее предельное пороговое значение и нижнее предельное пороговое значение напряжения аккумулятора (14) изменяются за счет температуры аккумулятора (14).
3. Устройство (2, 90, 100, 110, 120, 130) по п.1, в котором амортизация колебаний подрессоренной части ограничивается в момент времени, в который двигатель (5) внутреннего сгорания запускается или останавливается, а также когда ток аккумулятора (14) равен или превышает верхнее предельное пороговое значение, или равен или ниже нижнего предельного порогового значения.
4. Устройство (2, 90, 100, 110, 120, 130) по п.3, в котором верхнее предельное пороговое значение и нижнее предельное пороговое значение тока аккумулятора (14) изменяются за счет температуры аккумулятора (14).
5. Устройство (2, 90, 100, 110, 120, 130) по п.1, в котором транспортное средство (1) включает в себя двигатель (5) внутреннего сгорания в качестве источника энергии при движении и средство (45) очистки, которое очищает выхлопной газ, выпускаемый из двигателя (5) внутреннего сгорания, и амортизация колебаний подрессоренной части ограничивается, когда выполняется требование нагрева средства (45) очистки.
6. Устройство (2, 90, 100, 110, 120, 130) по п.1, в котором амортизация колебаний подрессоренной части ограничивается, когда температура аккумулятора (14) равна или превышает верхнее предельное пороговое значение, или равна или меньше нижнего предельного порогового значения.
7. Устройство (2, 90, 100, 110, 120, 130) по п.1, в котором транспортное средство (1) включает в себя средство (121, 122) управления самодиагностикой отказов, которое выполняет управление самодиагностикой отказов, и амортизация колебаний подрессоренной части ограничивается, когда выполняется управление самодиагностикой отказов.
8. Устройство (2, 90, 100, 110, 120, 130) по п.1, в котором транспортное средство (1) включает в себя средство (50, 53) управления с обратной связью по величине заряда/разряда, которое выполняет управление с обратной связью по величине заряда/разряда для регулирования величины заряда аккумулятора (14) и величины разряда аккумулятора (14) в ответ на величину заряда аккумулятора (14), и амортизация колебаний подрессоренной части ограничивается, пока выполняется управление с обратной связью по величине заряда/разряда.
9. Устройство (2, 90, 100, 110, 120, 130) по п.8, в котором, пока выполняется амортизация колебаний подрессоренной части, ограничивается управление с обратной связью по величине заряда/разряда.
| JP 2008220129 А, 18.09.2008 | |||
| JP 2007055435 А, 08.03.2007 | |||
| Фрикционная паровая турбина | 1930 |
|
SU26305A1 |

