Изобретение относится к области испытаний систем вооружения и может быть использовано для оценки помехоустойчивости оптико-электронных систем наведения высокоточного оружия, в частности полуактивных лазерных головок самонаведения (ГСН).
Известно устройство (аналог) к заявляемому решению - устройство (комплекс) для оценки параметров полуактивной лазерной головки самонаведения [SU 1841030 А1, 20.02.2015], содержащее лазер с блоком питания, полуактивную лазерную головку самонаведения, установленную на динамическом стенде с приводом, генератор импульсов кода, блок управления параметрами излучения, оптический имитатор изменения дальности, блок измерения дальности и вычислитель углового положения оси ГСН. Устройство позволяет сформировать пространственно-временные характеристики пятна подсвета цели штатного целеуказателя для обеспечения реальных условий применения полуактивных лазерных ГСН.
Недостатком известного устройства является низкие функциональные возможности устройства в части оценки помехоустойчивости полуактивной лазерной ГСН по основному показателю - промах управляемого боеприпаса, наиболее полно характеризующего эффективность системы наведения высокоточного оружия в условиях воздействия преднамеренных оптических импульсных помех.
Наиболее близким по технической сущности является комплекс оценки на полунатурной модели эффективности радиоподавления радиолокационной ГСН управляемой ракеты (прототип) [RU 2695496 С1, 23.07.2019]. Комплекс содержит последовательно соединенные блок ввода данных, головку самонаведения, устройство АЦП/ЦАП, блок моделирования контура наведения управляемого боеприпаса, а также первое устройство позиционирования, на котором размещена головка самонаведения, и второе, третье устройства позиционирования, которые выполнены с возможностью перемещения в угломестной и азимутальной плоскостях.
Недостатком комплекса является низкие функциональные возможности комплекса в части оценки помехоустойчивости полуактивной лазерной ГСН в динамике наведения управляемого боеприпаса при его сближении с целью по величине промаха управляемого боеприпаса в условиях воздействия различных видов преднамеренных оптических импульсных помех.
Техническим результатом данного изобретения является повышение функциональных возможностей комплекса за счет оценки помехоустойчивости полуактивной лазерной ГСН в динамике наведения управляемого боеприпаса при его сближении с целью по величине промаха управляемого боеприпаса в условиях воздействия различных видов преднамеренных оптических импульсных помех.
Технический результат достигается тем, что в известном устройстве, содержащем последовательно соединенные блок ввода данных, головку самонаведения, устройство АЦП/ЦАП, блок моделирования контура наведения управляемого боеприпаса, кроме того первое устройство позиционирования, на котором размещена головка самонаведения, а также второе и третье устройства позиционирования, которые выполнены с возможностью перемещения в угломестной и азимутальной плоскостях, а также блоки формирования сигналов цели и помехи, которые выходами соединены с входами излучателей сигналов цели и помехи соответственно, при этом излучатели сигналов цели и помехи размещены на втором и третьем устройствах позиционирования, кроме того блок моделирования контура наведения управляемого боеприпаса первым и вторым выходами соединен с первыми входами блоков формирования сигналов цели и помехи соответственно, дополнительно введены блок синхронизации и формирования кода и оптическая система, которая размещена на первом устройстве позиционирования соосно с головкой самонаведения, кроме того блок моделирования контура наведения управляемого боеприпаса третьим, четвертым и пятым выходами соединен со вторым, третьим и четвертым входами устройства АЦП/ЦАП соответственно, которое вторым, третьим и четвертым выходом соединено с входами первого, второго и третьего устройств позиционирования соответственно, при этом блок ввода данных вторым выходом соединен с входом блока синхронизации и формирования кода, который выходом соединен со вторыми входами блоков формирования сигналов цели и помехи, а первое устройство позиционирования выполнено с возможностью угловых перемещений относительно продольной оси головки самонаведения.
Сущность изобретения состоит:
- в формировании импульсного излучения подсвета цели с кодированной временной структурой и расширении номенклатуры преднамеренных оптических импульсных (как синхронных, так и несинхронных относительно сигнала цели) помех за счет введения блока синхронизации и формирования кода;
- в расширении поля зрения полуактивной лазерной ГСН и приближении условий стендовых испытаний к реальным (летным) за счет введения оптической системы и размещения ее на первом устройстве позиционирования соосно с ГСН;
- в расширении функциональных возможностей комплекса, имитации кинематики сближения полуактивной лазерной ГСН и динамики полета управляемого боеприпаса для оценки величины его промаха в условиях воздействия преднамеренных оптических импульсных помех за счет управления блоком формирования сигналов цели и первым устройством позиционирования, которое выполнено с возможностью угловых перемещений относительно продольной оси ГСН.
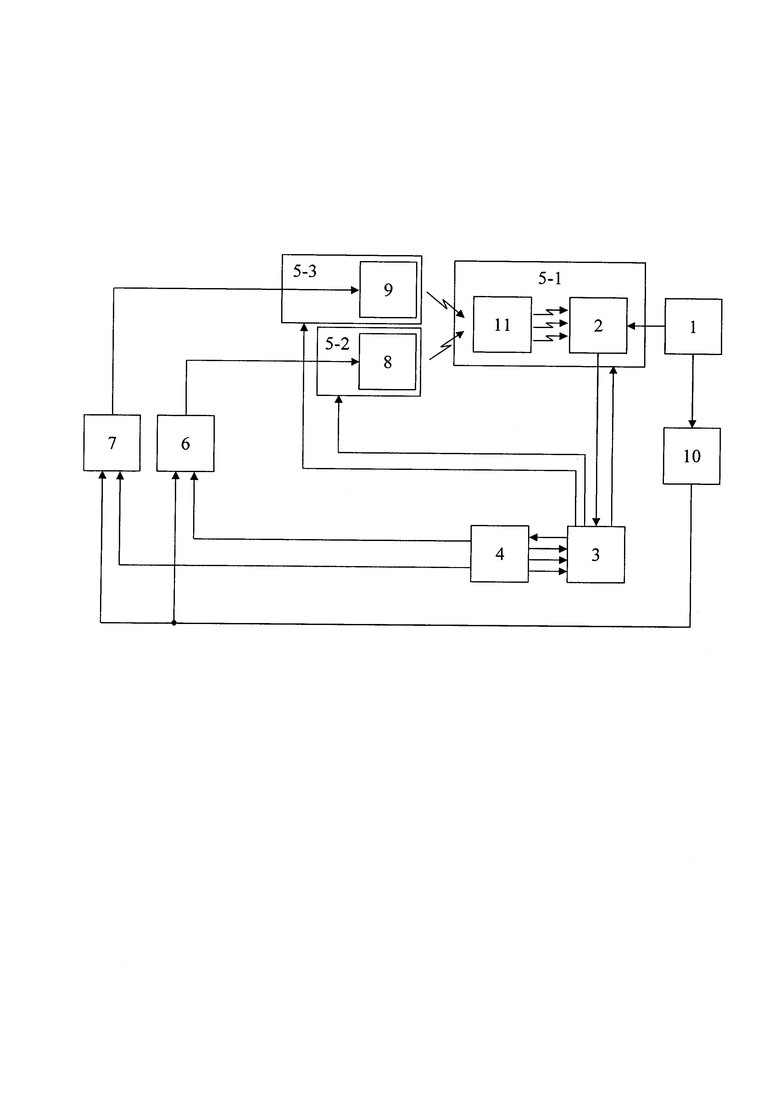
На фигуре приведена структурная схема комплекса оценки помехоустойчивости полуактивной лазерной ГСН управляемого боеприпаса. На структурной схеме цифрами обозначены: 1 - блок ввода данных; 2 - полуактивная лазерная ГСН; 3 - устройство АЦП/ЦАП; 4 - блок моделирования контура наведения управляемого боеприпаса; 5-1 - первое устройство позиционирования; 5-2 - второе устройство позиционирования; 5-3 - третье устройство позиционирования; 6 - блок формирования сигналов цели; 7 - блок формирования сигналов помехи; 8 - излучатель сигналов цели; 9 - излучатель сигналов помехи; 10 - блок синхронизации и формирования кода; 11 - оптическая система.
Блок ввода данных 1, полуактивная лазерная ГСН 2, устройство АЦП/ЦАП 3 и блок моделирования контура наведения управляемого боеприпаса 4 соединены последовательно. Полуактивная лазерная ГСН 2 размещена соосно с оптической системой 11 на первом устройстве позиционирования 5-1, которое выполнено с возможностью угловых перемещений относительно продольной оси ГСН 2. Блоки формирования сигналов цели 6 и помехи 7 выходами соединены с входами излучателей сигналов цели 8 и помехи 9 соответственно. При этом излучатели сигналов цели 8 и помехи 9 размещены на втором 5-2 и третьем 5-3 устройствах позиционирования, которые выполнены с возможностью перемещения в угломестной и азимутальной плоскостях. Блок моделирования контура наведения управляемого боеприпаса 4 первым и вторым выходами соединен с первыми входами блоков формирования сигналов цели 6 и помехи 7 соответственно. Кроме того, блок моделирования контура наведения управляемого боеприпаса 4 третьим, четвертым и пятым выходами соединен со вторым, третьим и четвертым входами устройства АЦП/ЦАП 3 соответственно, которое вторым, третьим и четвертым выходом соединено с входами первого, второго и третьего устройств позиционирования соответственно. Блок ввода данных 1 вторым выходом соединен с входом блока синхронизации и формирования кода 10, который выходом соединен со вторыми входами блоков формирования сигналов цели 6 и помехи 7.
Назначения элементов, представленных на схеме ясны из их названия.
Блок синхронизации и формирования кода 10 предназначен для формирования заданной кодированной временной структуры последовательности импульсов излучения подсвета цели, а также временной структуры последовательности импульсов излучения помехи в синхронном (относительно импульсов излучения подсвета цели) или несинхронном режиме для расширения номенклатуры преднамеренных оптических импульсных помех и оценки помехоустойчивости полуактивных лазерных ГСН 2 в условиях помех.
Блок синхронизации и формирования кода 10 может быть выполнен, например, в виде генератора импульсов и кодовых последовательностей с устройством управления на базе микропроцессора с встроенной памятью [RU 2145462 С1, 10.02.2000].
Оптическая система 11 предназначена для формирования импульсного излучения подсвета цели (помехи) и расширения поля зрения полуактивной лазерной ГСН 2 путем перераспределения в пространстве электромагнитного поля, исходящего из излучателей сигналов цели 8 и помехи 9. Расширение поля зрения обеспечивает нахождение в поле зрения полуактивной лазерной ГСН 2 всех элементов фоноцелевой и помеховой обстановки на протяжении всего периода экспериментальной оценки, тем самым приближая условия стендовых испытаний к реальным (летным).
В качестве оптической системы 11 может быть использован, например, объектив коллиматора, формирующий на ГСН параллельный пучок лучей. С технологической и аберрационной точек зрения наиболее подходящей является выпукло-плоская линза, выпуклая поверхность которой размещена в направлении излучателей сигналов цели 8 и помехи 9 на дистанции фокусного расстояния (для уменьшения сферической аберрации), а плоская поверхность непосредственно перед полуактивной лазерной ГСН 2 [см., например, Андреев А.Н., Гаврилов Е.В., Ишанин Г.Г. и др. Оптические измерения. - М.: Университетская книга; Логос, 2008, стр. 103-104].
Первое устройство позиционирования 5-1 предназначено для осуществления угловых перемещений относительно продольной оси ГСН 2 по сигналам управления (текущим значениям угла визирования цели), формируемым в блоке моделирования контура наведения управляемого боеприпаса 4. Первое устройство позиционирования 5-1 может быть выполнено, например, в виде динамического стенда, представляющего собой автоматическую поворотную (двухстепенную) платформу [RU 2263869 С1, 10.11.2005].
Заявленный комплекс работает аналогично прототипу с некоторыми отличиями, которые заключаются в следующем.
Со второго выхода блока ввода данных 1 через блок синхронизации и формирования кода 10 на вторые входы блоков формирования сигналов цели 6 и помехи 7 подается сигнал, содержащий информацию о выборе заданного варианта фоноцелевой обстановки в виде кодированной временной структуры последовательности импульсов излучения подсвета цели, а также помеховой - в виде временной структуры последовательности импульсов излучения помехи. В памяти блока синхронизации и формирования кода 10 имеется база данных различных временных структур последовательности импульсов излучений подсвета цели и помехи, соответствующих вариантам фоноцелевой и помеховой обстановки для оценки помехоустойчивости полуактивных лазерных ГСН 2 в условиях помех.
В зависимости от выбранного варианта в блоках формирования сигналов цели 6 и помехи 7 формируются исходные уровни напряжения, которые подаются на излучатели сигналов цели 8 и помехи 9, которые формируют излучения подсвета цели и помехи с определенной расходимостью и заданной мощностью. Кроме того, с первого, второго и третьего выходов блока моделирования контура наведения управляемого боеприпаса 4 подаются сигналы на первые входы блоков формирования сигналов цели 6 и помехи 7 соответственно. В зависимости от информационных сигналов, которые содержат информацию о текущих значениях дальности ГСН 2 до цели, в блоках формирования сигналов цели 6 и помехи 7 происходит последующее изменение уровня напряжения, имитируя сближение ГСН 2 с целью за счет динамично изменяющейся в реальном масштабе времени мощности излучений подсвета цели и помехи. По преобразованным таким образом и выведенным на излучатели сигналов цели 8 и помехи 9 излучениям работает полуактивная лазерная ГСН 2, которая включается по сигналу с первого выхода блока ввода данных 1.
Передача лазерного излучения подсвета цели и помехи от излучателей сигналов цели 8 и помехи 9 на приемное устройство полуактивной лазерной ГСН 2 осуществляется через оптическую систему 11, которая размещается соосно с ГСН 2 на удалении от излучателей сигналов цели 8 и помехи 9 на фокусное расстояние оптической системы 11.
С выхода полуактивной лазерной ГСН 2 аналоговый сигнал, характеризующий угловую скорость перемещения цели (координаты цели и помехи), преобразуется устройством АЦП/ЦАП 3 в цифровую форму и подается на вход блока моделирования контура наведения управляемого боеприпаса 4, в котором определяются текущие значения дальности полуактивной лазерной ГСН 2 до цели и угла визирования цели. В блоке моделирования контура наведения управляемого боеприпаса 4 осуществляется процесс наведения управляемого боеприпаса на цель. Кроме того, на каждом шаге моделирования по времени рассчитываются координаты цели, помехи и боеприпаса. При этом цифровой сигнал, характеризующий угол визирования цели, с пятого, шестого и седьмого выходов блока моделирования контура наведения управляемого боеприпаса 4 преобразуется устройством АЦП/ЦАП 3 в аналоговую форму и подается на входы первого 5-1, второго 5-2 и третьего 5-3 устройств позиционирования соответственно. Коррекция взаимного углового положения цели, помехи и боеприпаса осуществляется за счет перемещений вторым 5-2 и третьим 5-3 устройствами позиционирования цели и помехи в угломестной и азимутальной плоскостях, а также угловых перемещений первым устройством позиционирования 5-1 относительно продольной оси полуактивной лазерной ГСН 2.
При завершении имитации динамики полета управляемого боеприпаса и кинематики сближения полуактивной лазерной ГСН 2 с целью, когда текущее значение дальности до цели меньше заданного, в блоке моделирования контура наведения управляемого боеприпаса 4 осуществляется оценка величины промаха управляемого боеприпаса относительно начальной точки прицеливания в условиях воздействия преднамеренных оптических импульсных помех, и определяется помехоустойчивость полуактивной лазерной ГСН управляемого боеприпаса.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ И КОМПЛЕКС ОЦЕНКИ ПОМЕХОУСТОЙЧИВОСТИ ТЕЛЕВИЗИОННОЙ ГОЛОВКИ САМОНАВЕДЕНИЯ УПРАВЛЯЕМОГО БОЕПРИПАСА | 2020 |
|
RU2751144C1 |
| КОМПЛЕКС ОЦЕНКИ ПОМЕХОУСТОЙЧИВОСТИ ТЕПЛОВИЗИОННОЙ ГОЛОВКИ САМОНАВЕДЕНИЯ УПРАВЛЯЕМОГО БОЕПРИПАСА | 2020 |
|
RU2740434C1 |
| ОПТИЧЕСКАЯ ПОЛЯРИЗАЦИОННАЯ ГОЛОВКА САМОНАВЕДЕНИЯ С ОДНОЭЛЕМЕНТНЫМ ИНФРАКРАСНЫМ ПРИЕМНИКОМ ИЗЛУЧЕНИЯ | 2023 |
|
RU2825219C1 |
| СПОСОБ СТРЕЛЬБЫ УПРАВЛЯЕМЫМ СНАРЯДОМ С ЛАЗЕРНОЙ ПОЛУАКТИВНОЙ ГОЛОВКОЙ САМОНАВЕДЕНИЯ И УСТРОЙСТВО, ЕГО РЕАЛИЗУЮЩЕЕ | 2019 |
|
RU2737634C2 |
| АКТИВНАЯ ЛАЗЕРНАЯ ГОЛОВКА САМОНАВЕДЕНИЯ | 2013 |
|
RU2573709C2 |
| Способ полунатурного моделирования системы управления летательного аппарата с пассивной или полуактивной или активной головкой самонаведения и устройство для его реализации | 2020 |
|
RU2767956C2 |
| ЛАЗЕРНАЯ ПОЛУАКТИВНАЯ ГОЛОВКА САМОНАВЕДЕНИЯ | 2011 |
|
RU2473866C1 |
| ПОЛУАКТИВНАЯ ГОЛОВКА САМОНАВЕДЕНИЯ | 2016 |
|
RU2645046C1 |
| КОРАБЕЛЬНЫЙ КОМПЛЕКС ВЫСОКОТОЧНОГО ОРУЖИЯ БЛИЖНЕГО РУБЕЖА | 1998 |
|
RU2135391C1 |
| ЛАЗЕРНАЯ ПОЛУАКТИВНАЯ ГОЛОВКА САМОНАВЕДЕНИЯ | 2010 |
|
RU2439477C1 |
Изобретение относится к области испытаний систем вооружения и касается комплекса оценки помехоустойчивости полуактивной лазерной головки самонаведения управляемого боеприпаса. Комплекс содержит последовательно соединенные блок ввода данных, головку самонаведения, устройство АЦП/ЦАП, блок моделирования контура наведения управляемого боеприпаса, три устройства позиционирования, блоки формирования сигналов цели и помехи, соединенные со входами излучателей сигналов цели и помехи, блок синхронизации и формирования кода и оптическую систему. Головка самонаведения и оптическая система размещены на первом устройстве позиционирования, которое выполнено с возможностью угловых перемещений относительно продольной оси головки самонаведения. Излучатели сигналов цели и помехи размещены на втором и третьем устройствах позиционирования, которые выполнены с возможностью перемещения в угломестной и азимутальной плоскостях. Технический результат заключается в обеспечении возможности оценки помехоустойчивости головки самонаведения в динамике наведения управляемого боеприпаса при его сближении с целью по величине промаха управляемого боеприпаса в условиях воздействия различных видов преднамеренных оптических импульсных помех. 1 ил.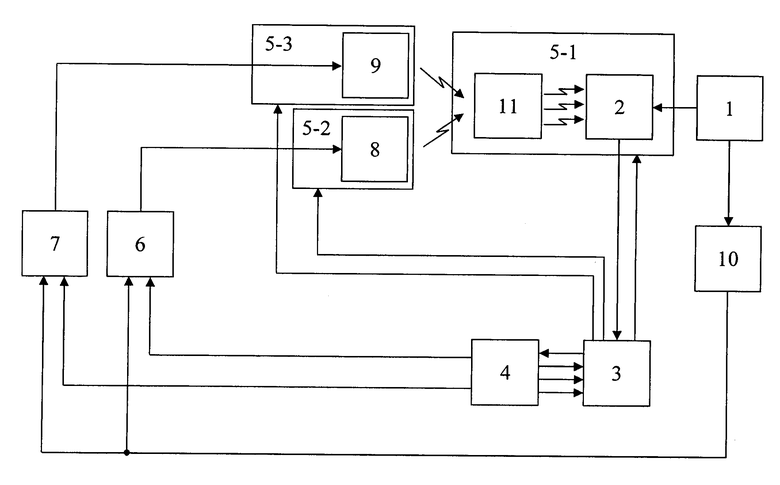
Комплекс оценки помехоустойчивости полуактивной лазерной головки самонаведения управляемого боеприпаса, содержащий последовательно соединенные блок ввода данных, головку самонаведения, устройство АЦП/ЦАП, блок моделирования контура наведения управляемого боеприпаса, кроме того первое устройство позиционирования, на котором размещена головка самонаведения, а также второе и третье устройства позиционирования, которые выполнены с возможностью перемещения в угломестной и азимутальной плоскостях, а также блоки формирования сигналов цели и помехи, которые выходами соединены с входами излучателей сигналов цели и помехи соответственно, при этом излучатели сигналов цели и помехи размещены на втором и третьем устройствах позиционирования, кроме того блок моделирования контура наведения управляемого боеприпаса первым и вторым выходами соединен с первыми входами блоков формирования сигналов цели и помехи соответственно, отличающийся тем, что дополнительно введены блок синхронизации и формирования кода и оптическая система, которая размещена на первом устройстве позиционирования соосно с головкой самонаведения, кроме того блок моделирования контура наведения управляемого боеприпаса третьим, четвертым и пятым выходами соединен со вторым, третьим и четвертым входами устройства АЦП/ЦАП соответственно, которое вторым, третьим и четвертым выходом соединено с входами первого, второго и третьего устройств позиционирования соответственно, при этом блок ввода данных вторым выходом соединен с входом блока синхронизации и формирования кода, который выходом соединен со вторыми входами блоков формирования сигналов цели и помехи, а первое устройство позиционирования выполнено с возможностью угловых перемещений относительно продольной оси головки самонаведения.
| СПОСОБ И КОМПЛЕКС ОЦЕНКИ НА ПОЛУНАТУРНОЙ МОДЕЛИ ЭФФЕКТИВНОСТИ РАДИОПОДАВЛЕНИЯ РАДИОЛОКАЦИОННОЙ ГОЛОВКИ САМОНАВЕДЕНИЯ УПРАВЛЯЕМОЙ РАКЕТЫ | 2018 |
|
RU2695496C1 |
| УСТРОЙСТВО ДЛЯ ОЦЕНКИ ПАРАМЕТРОВ ПОЛУАКТИВНОЙ ЛАЗЕРНОЙ ГОЛОВКИ САМОНАВЕДЕНИЯ | 1988 |
|
SU1841030A1 |
| ИМИТАТОР ЦЕЛИ ДЛЯ БОЕПРИПАСОВ С ТЕЛЕВИЗИОННЫМИ ГОЛОВКАМИ САМОНАВЕДЕНИЯ | 1999 |
|
RU2164653C1 |
| US 5592850 A1, 14.01.1997. | |||

