Изобретение относится к техническим средствам охраны объектов при помощи беспилотников или дронов, которые могут быть использованы для различных целей.
Известны способ и система управления беспилотником (дроном) по патенту РФ на изобретение № 2709562, МПК А63Н 27/00, опубл. 18.12.2019 г.
Эта группа изобретений относится к способу и системе автоматического управления дроном.
Для автоматического управления дроном, с его борта излучают импульсы переменного высокочастотного излучения с закодированным адресом доставки груза, в возможных местах посадки их принимают, декодируют, при совпадении адреса формируют ответные сигналы, по каждому ответному сигналу формируют импульс ультразвукового излучения, определяющий положение нужной курсо-глиссады, по принятым акустическим импульсам производят управление дроном определенным образом, а при посадке дрона при получении сообщения о завершении посадки выключают двигатели дрона, прикрепляют его к взлетно-посадочному гнезду и отцепляют поддон с доставляемым грузом. Система содержит расположенные на борту дрона полетный контроллер, спутниковую систему навигации, гироскоп, акселерометр, магнитометр, барометр, два акустических датчика, фильтры-формирователи сигналов, постоянное запоминающее устройство команд взлета (ПЗУ) и ПЗУ команд посадки, датчик завершения посадки, определитель азимутального отклонения, посадочную шасси-антенну, фиксатор дрона в гнезде, фиксатор груза, три RS-триггера, а у адресата доставки установлено взлетно-посадочное гнездо. Обеспечивается точность управления, взлета и посадки дрона при доставке грузов в городских условиях.
Недостатки: низкая точность управления и безопасность полета на низких высотах и в процессе приземления.
Известна система управления беспилотником (дроном) по патенту РФ на изобретение № 2709562, МПК А63Н 27/00, опубл. 18.12.2019 г., прототип.
Эта система содержит содержащий блок управления с GPS приемник с антенной беспилотника и систему видеонаблюдения, содержащая рабочее место оператора, состоящее из системного блока, монитора, клавиатуры и манипулятора типа «Мышь», пульт управления, соединенный по радиоканалу с системным блоком,
Недостатки: низкая точность маневрирования и безопасность полета беспилотника, особенно на низких высотах.
Задача создания изобретения: повышение точности маневрирования беспилотника на низких высотах.
Достигнутые технические результаты: более точное определение координат поверхности, в том числе по оси координат Z и определение габаритных размеров всех помех в том числе объектов и субъектов.
Решение указанной задачи достигнуто в системе управления беспилотником содержащей блок управления, с GPS приемником с антенной беспилотника и средствами видеонаблюдения, рабочее место оператора, состоящее из системного блока, монитора, клавиатуры и манипулятора типа «Мышь», пульт управления, соединенный по радиоканалу с системным блоком и беспилотником, тем, что к системному блоку присоединен сервер системы 4 ГИС с базой карт в динамике по времени издания и цифровых клонов объектов, база карт содержит информацию по оси Z, в качестве объектов в память сервера 4ГИС заложены цифровые клоны рельефа местности, недвижимости, растительности, помехи перелету, дороги, транспортные средства, объекты и субъекты, растительность заложена в память сервера 4 ГИС в зависимости от времени года.
В качестве объектов в сервер заложены цифровые коды объектов недвижимости в динамике.
В качестве субъектов в сервер заложены цифровые коды людей, домашних животных и диких зверей.
В качестве помех в сервер заложены цифровые коды столбов и воздушных проводов.
В качестве объектов в сервер заложены цифровые коды объектов в динамике.
Сущность изобретения поясняется на фиг. 1…4, где:
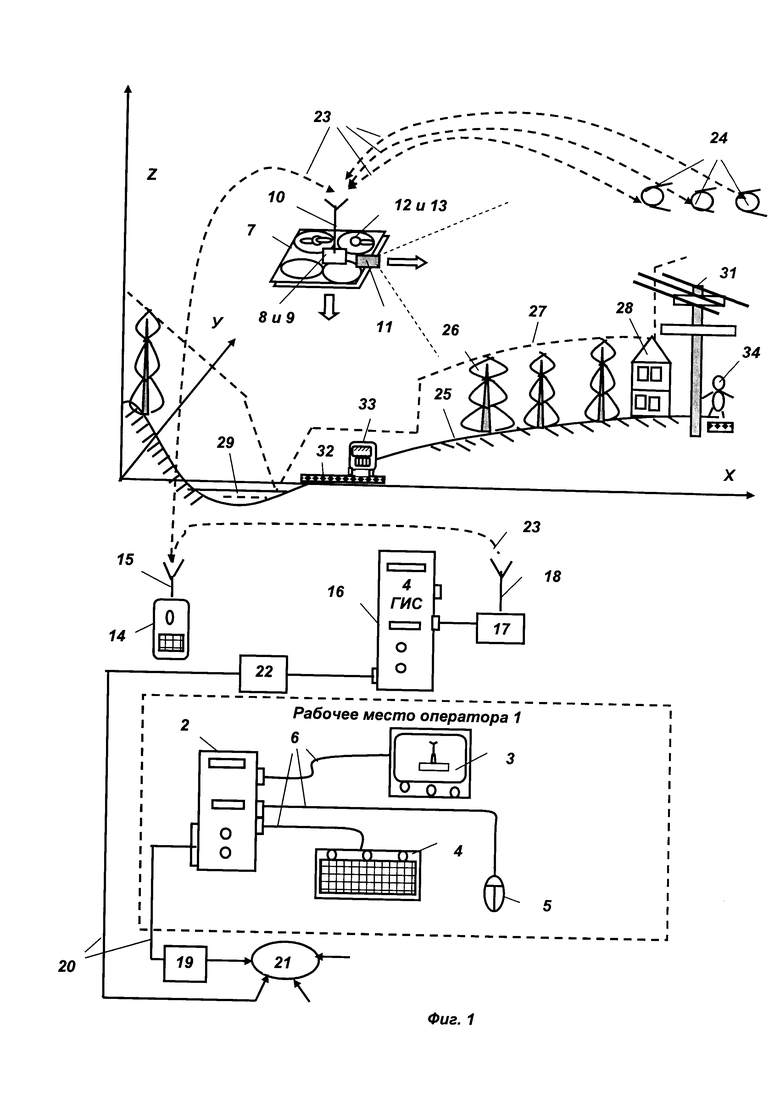
- на фиг. 1 приведена принципиальная схема устройства, вид в профиль,
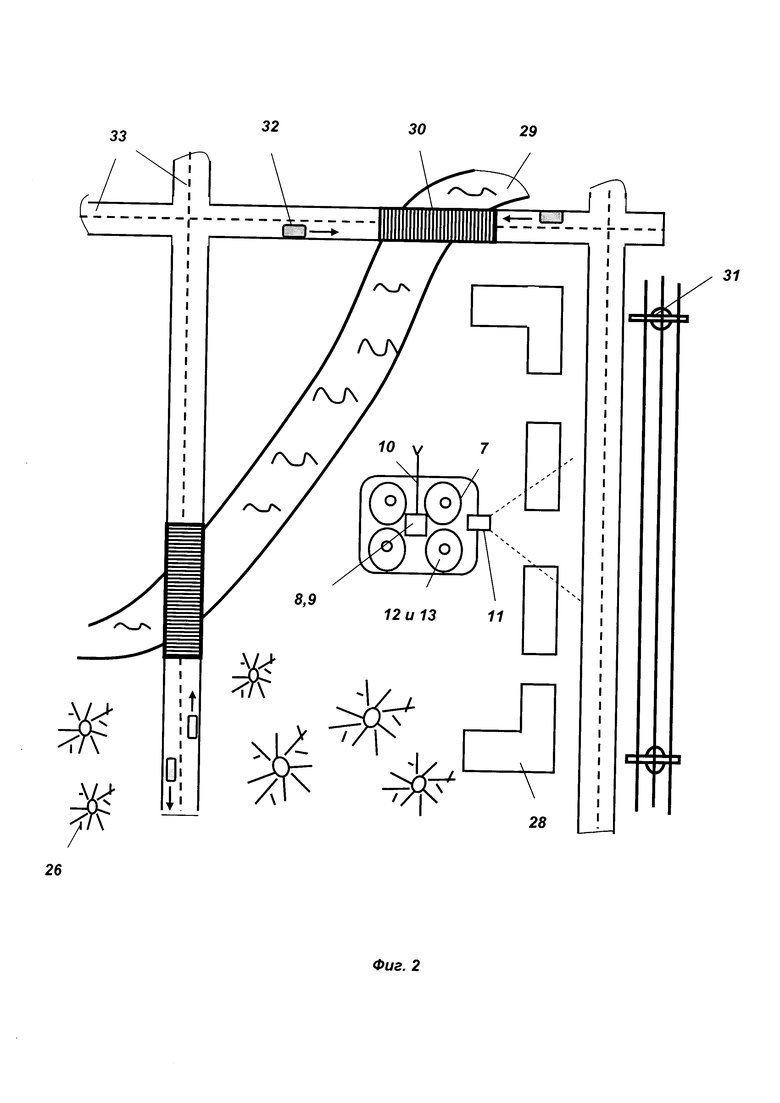
- на фиг. 2 приведена схема устройства, вид в плане,
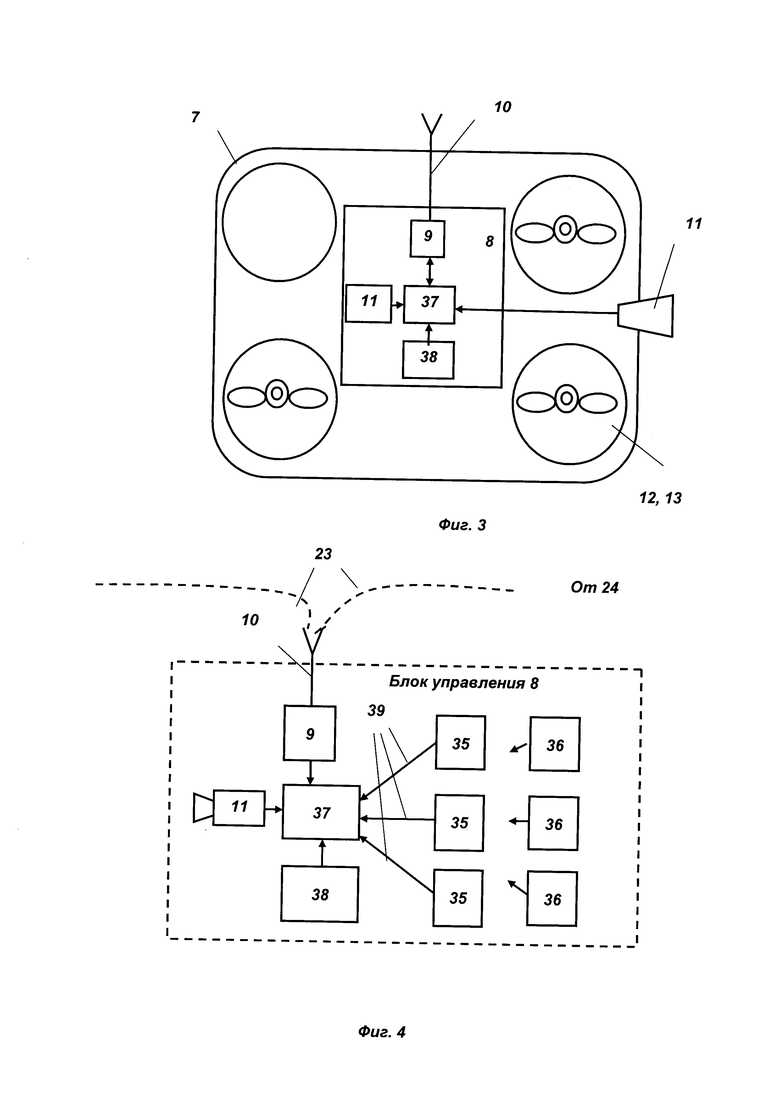
- на фиг. 3 приведена схема беспилотника (дрона),
- на фиг. 4 приведена схема блока управления беспилотника.
В описании применены следующие обозначения:
рабочее место оператора 1,
системный блок 2,
монитор 3,
клавиатура 4,
манипулятор типа «Мышь»5,
линия связи 6,
беспилотник 7,
блок управления беспилотника 8,
приемник «Глонасс» 9,
антенна аппарата 10,
средства видеонаблюдения 11,
двигатель 12,
движитель 13,
пульт управления 14,
антенна пульта 15,
сервер 4ГИС 16,
приемно-передающее устройство 17,
приемно-передающая антенна 18,
первый модем 19,
канал связи 20,
сеть Интернет 21,
второй модем 22,
радиоканал 23,
спутники 24,
земля 25,
растения 26,
реальный рельеф 27,
объект 28,
водоем 29,
мост 30,
помехи маневрированию 31,
транспортные средства 32,
дорога 33,
субъект 34,
датчик скорости 35,
датчик курса 36,
процессор 37,
источник энергопитания 38,
проводные каналы связи 39.
Система управления беспилотником 7 (фиг. 1) содержит рабочее место оператора 1, состоящее из системного блока 2, монитора 3, клавиатуры 4 и манипулятора типа «Мышь»5, соединенных линиями связями 6. с системным блоком 2.
Рабочее место оператора 1 находится на земле 25 и предназначено для сопровождения беспилотника 7 в трехмерном пространстве (в системе трех координат X Y и Z).
К системному блоку 2 присоединен линиями связи 6 сервер системы 4 ГИС 16 с картами в динамике по времени и базой реальных фото объектов и субъектов и помех маневрированию, в том числе столбы, провода, вышки связи и т.д.
Понятие цифровой двойник (цифровой клон - ЦК) связано с представлением большого количества данных в пространстве и времени, для транспортного комплекса, включающего сеть транспортных линий, транспортных узлов и технические средства перевозки, это виртуальная модель всей системы целиком в трехмерной ГИС, ретроспективной и перспективной во времени («цифровой двойник» системы). Объемная пространственная модель (3D), геопривязанная к координатам Земли с добавлением четвертой (временной) составляющей, образует 4D ГИС.
Все связи между наземными модулями выполнены линиями связи 6. В систему ГЛОНАСС входят приемник Глонасс 9 с антенной 10 аппарата и спутники 24.
На фиг. 3 приведен более детально беспилотник 7. Он содержит беспилотник 7, блок управления беспилотника 8, приемник «Глонасс» 9, двигатель 12 и движитель 13,
Пульт управления 14 содержит антенну пульта 15, которая радиоканалом 23 соединена с антенной аппарата 10, для управления им. К серверу 4ГИС 16, присоединено приемно-передающее устройство 17 с приемно-передающей антенной 18 для сравнения реального изображения полученного средствами видеонаблюдения 11 и их сравнения с базой цифровых клонов ЦК.
При реализации цифрового клона - ЦК обеспечивает создание, наполнение и сопровождение многоформатного полноценного «цифрового двойника» физического объекта и транспортной инфраструктуры (дорог и транспортных средств) для оптимизации ее геопривязанной модели в реальном времени, используя интегрированное мультифизическое, многомасштабное, вероятностное моделирование различных систем, стационарных и подвижных объектов, которое использует лучшие доступные физические модели, обновления датчиков, историю, результаты прогнозов и многое другое.
Трехмерное моделирование в ГИС есть не просто имитация реальности, а инструмент анализа, моделирования и публикации трехмерных геопривязанных пространственных данных, а также обоснования принятия решений относительно объектов и субъектов управляющего воздействия. Для получения качественной 3D-модели в сервер системы 4ГИС 16 используются все доступные типы данных (рельеф, изображения местности или дна, текстура, модели зданий и сооружений, дорог и пр.) любых ГИС (OpenStreetMap, ArcGIS, ИнГео, Панорама), после привязки к координатам (широта, долгота и высота) и внесении дополнительных геопространственных и атрибутивных данных, получаем 3D ГИС. При рассмотрении совокупности 3D-моделей в разрезе времени (история или прогноз) имеем четвертое измерение - позволяющее видеть ретроспективу объекта или моделировать будущие его состояния в геоинформационной системе - 4D ГИС.
Системный блок 2 через первый модем 19, канал связи 20, сеть Интернет 21 и второй модем 22 соединен с сервером 4ГИС 16.
Сервер 4ГИС 16 через приемно-передающее устройство 17 и приемно-передающую антенну 18 радиоканал 23 соединен с беспилотником 7, который также радиоканалами 23 соединен со спутниками 24 системы Глонасс.
Средства видеонаблюдения 11 идентифицируют землю 25 и растения 26 и сравнивают их с данными в цифровой базе 4ГИС и формируют реальный рельеф 27 с учетом объектов 28, водоемов 29, мостов 30 и помех маневрированию 31. Кроме того учитываются транспортные средства 32 на дорогах 33 и даже субъекты 34.
Беспилотник 7 содержит блок управления беспилотника 8, приемник Глонасс 9 и антенну аппарата 10. Кроме того, в его состав входят средства видеонаблюдения И (видеокамеры и аппаратура преобразования видеосигнала и его передачи, двигатели 12, движители 13.
Блок управления 8 (фиг. 4) содержит датчики скорости 35, датчики курса 36 и процессор.
Для энергопитания служит источник энергопитания 38. Датчики 35 и 36 соединены с процессором 37 проводными каналами связи 39. На фиг. 4 приведен блок управления беспилотника 8.
Он содержит датчик скорости 35. датчики курса 36, процессор 37, источник энергопитания 38, проводные каналы связи 39, которые соединяют датчики 35 и 36 с процессором 37.
РАБОТА СИСТЕМЫ
При работе системы (фиг. 1 и 2) включают системный блок 2 и пульт управления 14.
Средства видеонаблюдения 11 идентифицируют землю 25 и растения 26 и сравнивают их с данными в цифровой базе 4ГИС и формируют реальный рельеф 27 с учетом объектов 28, водоемов 29, мостов 30 и помех маневрированию 31. Кроме того, учитываются транспортные средства 32 на дорогах 33 и субъекты 34, обнаруженные средствами видеонаблюдения 11.
При подаче с пульта управления 14 команд, нарушающих безопасность полета, например, пролет ниже уровня реального рельефа 27 (фиг. 1) эти команды не выполняются и беспилотник 7 выполняет безопасный маневр и предупреждает об этом оператора.
Применение изобретения позволило:
На базе ЦОД предлагается создание подробной 4D ГИС местности и цифровых клонов, обменивающихся информацией с объектами транспортной инфраструктуры и транспортными средствами посредством беспроводной связи.
1. Наземных транспортных средств, в том числе беспилотных, с передачей данных (ЦКМО), что позволяет беспилотнику видеть и анализировать дорожную обстановку как с рядом собой, в непосредственной близости, так и в любом масштабе, с выдачей рекомендаций по вождению водителям или управлением беспилотным транспортом и обменом данными:
• Скорость
• Направление
• Координаты
• Окружающая обстановка, полученная от бортовых камер, лидаров, радаров и т.д.
2. Беспилотных летательных аппаратов для:
• Уточнение обстановки при ЧС или ДТП
• Доставки оборудования и медикаментов при ЧС или ДТП
3. Беспилотных подводных аппаратов для:
• Формирование карты глубин и рельефа дна
• Получение акустических изображений подводных объектов и сооружений
• Информационных табло
• Метеостанций и датчиков состояния дорожного полотна
• Комплексов контроля дорожного движения АСУДД
• Прочего оборудования
4. Транспортных потоков
• Формирование структуры дорожной сети
• Ретроспективный анализ (Моделирование и прогнозирование).
Применение изобретения позволило:
- повысить точность обнаружения координат беспилотника,
- повысить точность и безопасность маневрирования и посадки беспилотника, с учетом реальных помех маневрированию, в том числе субъектов и растительности,
- получить данные по реальной информации, в том числе о внешнем виде обнаруженных объектов и субъектов, их технических характеристиках, модернизации и переоборудовании, строительстве объектов недвижимости, модернизации судов во времени,
- сопровождение судов.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ доставки малокалиберных боеприпасов до цели с помощью автономного беспилотного летательного аппарата | 2024 |
|
RU2828335C1 |
| СИСТЕМА МОНИТОРИНГА СОСТОЯНИЯ ОБОРУДОВАНИЯ | 2020 |
|
RU2753736C1 |
| ГЕОИНФОРМАЦИОННАЯ СИСТЕМА В ФОРМАТЕ 4D | 2017 |
|
RU2667793C1 |
| СПОСОБ ЦЕНТРАЛИЗОВАННОЙ РАДИООХРАНЫ С ИСПОЛЬЗОВАНИЕМ ПАТРУЛЬНЫХ ТРАНСПОРТНЫХ СРЕДСТВ | 2003 |
|
RU2238590C1 |
| СПОСОБ ПОИСКА И ПЕРЕХВАТА УГНАННОГО ТРАНСПОРТНОГО СРЕДСТВА | 2003 |
|
RU2228274C1 |
| АВТОМАТИЗИРОВАННАЯ СИСТЕМА ИДЕНТИФИКАЦИИ ОБЪЕКТА И РЕГИСТРАЦИИ ЕГО СОСТОЯНИЯ | 2011 |
|
RU2444055C1 |
| ИНФОРМАЦИОННО-ОХРАННАЯ СИСТЕМА ДЛЯ ТРАНСПОРТНЫХ СРЕДСТВ И ОБЪЕКТОВ НЕДВИЖИМОСТИ | 2004 |
|
RU2244641C1 |
| СИСТЕМА ОБНАРУЖЕНИЯ И СОПРОВОЖДЕНИЯ СУДОВ В АКВАТОРИИ ПОГРАНИЧНОЙ ЗОНЫ | 2019 |
|
RU2714614C1 |
| СПОСОБ И УСТРОЙСТВО ОБЕСПЕЧЕНИЯ БЕЗОПАСНОСТИ МОСТА | 2015 |
|
RU2598803C1 |
| СИСТЕМА МОНИТОРИНГА ТРАНСПОРТНЫХ СРЕДСТВ И ОБЪЕКТОВ НЕДВИЖИМОСТИ | 2004 |
|
RU2243113C1 |
Изобретение относится к техническим средствам охраны объектов и может быть использовано для различных целей. Система управления БПЛА содержит блок управления с GPS приемником с антенной и средствами видеонаблюдения, рабочее место оператора с системным блоком, пульт управления, соединенный по радиоканалу с системным блоком и БПЛА. К системному блоку присоединен сервер системы 4 ГИС с базой карт в динамике по времени издания и цифровых клонов объектов. База карт содержит информацию по оси Z. В качестве объектов в память сервера 4ГИС заложены цифровые клоны рельефа местности, недвижимости, растительности, помехи перелету, дороги, транспортные средства, объекты и субъекты. Растительность заложена в память сервера 4 ГИС в зависимости от времени года. В качестве объектов в сервер заложены цифровые коды объектов недвижимости в динамике. В качестве субъектов в сервер заложены цифровые коды людей, домашних животных и диких зверей. В качестве помех в сервер заложены цифровые коды столбов и воздушных проводов. В качестве объектов в сервер заложены цифровые коды объектов в динамике. Повышается точность маневрирования БПЛА на низких высотах. 4 з.п. ф-лы, 4 ил.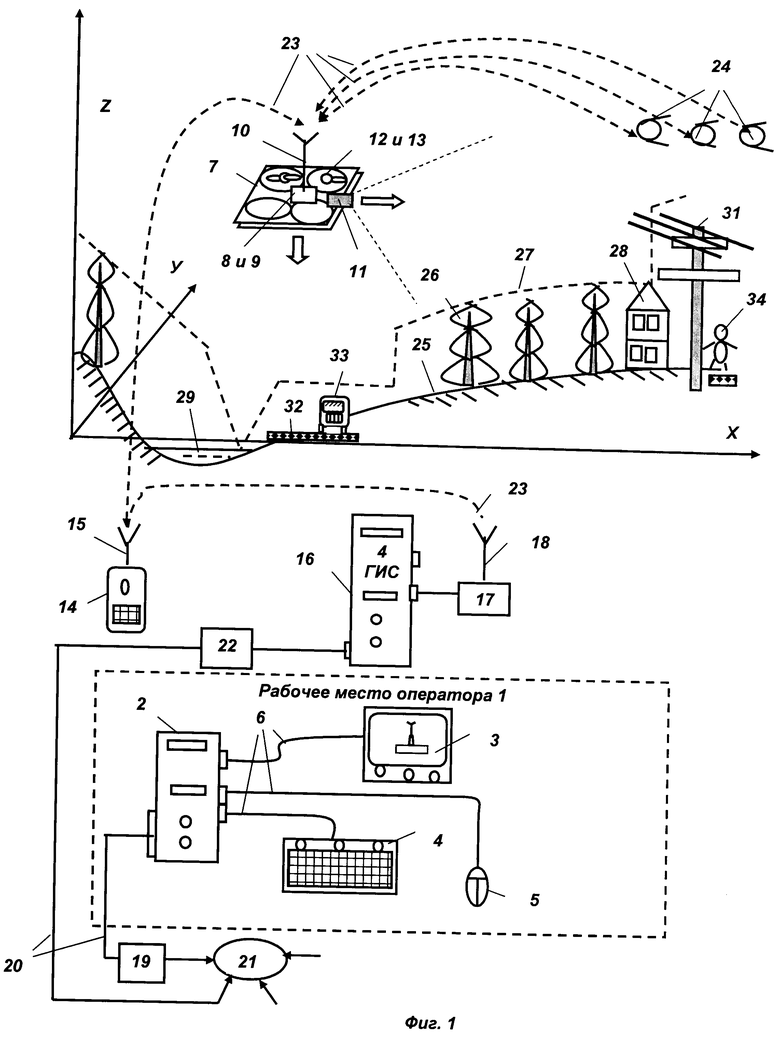
1. Система управления беспилотником, содержащая блок управления, с GPS приемником с антенной беспилотника и средствами видеонаблюдения, рабочее место оператора, состоящее из системного блока, монитора, клавиатуры и манипулятора типа «Мышь», пульт управления, соединенный по радиоканалу с системным блоком и беспилотником, отличающаяся тем, что к системному блоку присоединен сервер системы 4 ГИС с базой карт в динамике по времени издания и цифровых клонов объектов, база карт содержит информацию по оси Z, в качестве объектов в память сервера 4ГИС заложены цифровые клоны рельефа местности, недвижимости, растительности, помехи перелету, дороги, транспортные средства, объекты и субъекты, растительность заложена в память сервера 4 ГИС в зависимости от времени года.
2. Система управления беспилотником по п. 1, отличающаяся тем, что в качестве объектов в сервер заложены цифровые коды объектов недвижимости в динамике.
3. Система управления беспилотником по п. 1, отличающаяся тем, что в качестве субъектов в сервер заложены цифровые коды людей, домашних животных и диких зверей.
4. Система управления беспилотником по п. 1, отличающаяся тем, что в качестве помех в сервер заложены цифровые коды столбов и воздушных проводов.
5. Система управления беспилотником по п. 1, отличающаяся тем, что в качестве объектов в сервер заложены цифровые коды объектов в динамике.
| СПОСОБ УПРАВЛЕНИЯ ДРОНОМ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2019 |
|
RU2709562C1 |
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
| СПОСОБ И СИСТЕМА НАВИГАЦИИ ПАССАЖИРСКОГО ДРОНА В ГОРНОЙ МЕСТНОСТИ | 2018 |
|
RU2681278C1 |
| WO 2017174195 A1, 12.10.2017 | |||
| JP 20177411 А, 12.01.2017. | |||

