Изобретение относится к способам пространственной интерполяции восстановления рельефа морского дна при дискретных измерениях глубин посредством эхолокаторов и может быть использовано при выполнении метеорологических интерполяций, включая анализ ветровых полей, анализ радиологического и химического загрязнения, топографические интерполяции и другие.
Известно устройство для распознавания морского грунта путем измерения параметров эхосигнала при зондировании дна прямоугольными импульсами (авторское свидетельство SU №1103171 [1]).
В зависимости от типа грунта эхосигнал при нормальном падении на дно изменяет свою форму в широких пределах от теоретически неискаженного прямоугольного импульса на монолитах до существенно широкого импульса с весьма пологим фронтом и длительностью, в несколько раз превышающей длительность посылки на грунте, представляющим собой жидкую массу. В качестве информативного параметра используется крутизна фронта нарастания эхосигнала, которая измеряется и сравнивается с заранее проградуированной сеткой с нанесенными на нее границами жесткости для различных типов грунта.
Так как практически невозможно перекрыть зондирующими сигналами всю исследуемую площадь, то для дальнейшего построения поверхности рельефа дна или получения рельефа некоторой двумерной скалярной геопространственной характеристики применяют методы линейной и нелинейной интерполяции (см., например - Проблемы окружающей среды и природных ресурсов. М., ВИНИТИ, 1999, №11, c.13). Помимо основного недостатка, заключающегося в низкой достоверности распознавания морского грунта, обусловленной тем, что крутизна нарастания эхосигнала определяется главным образом акустическими свойствами границы раздела вода/грунт, а не всей толщины грунта, то при наличии на поверхности жидкого грунта неровностей или каменистых отложений крутизна нарастания фронта эхосигнала определяется отражательными свойствами неровностей или отложений, что приводит к получению завышенных значений жесткости грунта, а в сочетании с последующим восстановлением поверхности рельефа по интерполяции измерений может привести к необоснованным решениям, и, следовательно, к существенным потерям в реализации конкретной задачи.
В известном техническом решении (патент RU №2045081 С1 [2]), представляющим собой эхолокатор для распознавания морских грунтов, благодаря тому, что определяется степень физического состояния грунта по величине удлинения эхоимпульса, исходя из зависимости удлинения эхосигнала от физико-механических характеристик грунта, обеспечивается повышение точности определения параметров отражающей границы и достоверности результатов измерений по сравнению с техническим решением [1]. Однако восстановление рельефа по всей исследуемой поверхности сводится к применению формального метода интерполяции по измеренным величинам, что приводит к существенным потерям в реализации конкретной задачи.
В известном способе определения глубин акватории фазовым гидролокатором бокового обзора и фазовый гидролокатор бокового обзора для его осуществления (авторское свидетельство SU №1829019 А1 [3]), включающем излучение гидроакустического сигнала в сторону дна и прием отраженных сигналов в двух точках, расположенных по вертикали на заданном расстоянии, измерение времени задержки синфазных сигналов, угла бортовой качки носителя антенн и определение по полученным данным направлений прихода синфазных сигналов и искомых глубин акватории расчетным путем, в котором измеряют время задержки прихода отраженного гидроакустического сигнала по вертикали, определяют время задержки прихода тех же синфазных сигналов в случае их отражения от ровной поверхности дна по каждому расчетному направлению в соответствии с математическим выражением с определением сходимости вычисленных и измеренных значений времени задержки.
Определение сходимости вычисленных и измеренных значений позволяет уменьшить погрешность определения глубины акватории при проведении съемки рельефа дна акватории. Однако реализация данного способа требует выполнения предварительных вычислений для определения расчетных направлений, что обеспечивается при условии использования результатов ранее проводимых съемок на данной акватории. Так как с течением времени структура поверхности грунта не остается постоянной в силу изменчивости гидродинамических геофизических факторов, то использование расчетных данных не всегда является корректным и может привести к существенным погрешностям получения конечных результатов при съемки рельефа дна.
Кроме того, восстановление рельефа дна по всей исследуемой поверхности, как и в известных технических решениях [1, 2], сводится к применению формального метода интерполяции по измеренным дискретным величинам, что приводит к существенным потерям в реализации конкретных задач, в частности при формализации результатов измерений в картографическую продукцию.
При использовании известных способов решение задачи восстановления рельефа сводиться к построению непрерывной двумерной функции, проходящей через измеренные дискретные значения глубины. При этом на первом этапе производится триангулирование точек измерения, т.е. на множестве точек измерения вводится отношения "близости" точек, а на втором этапе строится собственно искомая функция, как композиция элементарных весовых функций (линейных или нелинейных). При такой обработке исходной информации свойства рельефа никак не учитываются и в процессе обработки возникают артефакты ложных гребней и ложбин в форме рельефа, и, следовательно, именно на этом этапе нарушается морфологический способ восстановления рельефа.
Выявленных недостатков лишен известный способ восстановления рельефа морского дна при измерениях глубин посредством гидроакустических средств, установленных на подвижных морских объектах, включающий измерение глубины с определением поправки, обусловленной местом установки гидроакустического средства, определение вертикального распределения скорости звука в воде по отраженным сигналам путем получения данных о триангуляции точек наблюдений с последующей их интерполяцией, восстановление формы рельефа дна, построение поверхности дна, в котором при определении поправки дополнительно измеряют доплеровский сдвиг частоты опорного сигнала гидроакустического лага, определяют скорость подвижного морского объекта посредством приемоиндикатора радио и спутниковых навигационных систем, при этом определение вертикального распределения скорости звука в воде выполняют по временным рядам плотности звуковой энергии, отраженной от внутренних неоднородностей водной среды и дна, путем регистрации всех приходящих сигналов, рассеянных от внутренних неоднородностей морской среды, от момента посылки звукового импульса до момента прихода отраженного от дна сигнала с формированием временного ряда плотности звуковой энергии, отраженной от внутренних неоднородностей морской среды и дна в соответствии с зависимостью
U(Z=0,t),
где Z - глубина в моменты времени t, а скорость звука в воде C(Z) определяют путем решения обратной задачи рассеяния, дополнительно регистрируют низкочастотные волны посредством искусственно возбуждаемых высокочастотных волн накачки, восстановление формы рельефа выполняют по относительным изменениям высоты рельефа в соответствии с неравенством
|h(r2)-h(r1)|<A|r2-r1|λ,
где h(r2)-h(r1) - разность высот в двух пространственных точках r1, r2; А (постоянная Гельдера), λ (показатель Гельдера) - положительные числа; 0<λ≤1, при этом выполняют оценку точности восстановления рельефа по величине относительного изменения высоты рельефа в зависимости от пространственного масштаба, при построении рельефа поверхности дна данные о триангуляции точек наблюдений интерпретируются в виде структуры неориентированного графа с определением длин (весов) ребер графа, а устройство для осуществления способа, представляющее собой гидролокатор для определения глубин акватории, содержащее функционально соединенные первую и вторую антенны, одна из которых излучающая, а вторая приемная, формирующие приемоизлучающие каналы, вычислитель, блок управления, в котором блок управления соединен с приемоизлучающими каналами, вычислителем, в которое дополнительно введены формирователь сигналов накачки, графопостроитель, параметрический излучающий тракт, который своим выходом соединен с излучающей антенной, а входом соединен с выходом формирователя накачки, который своим выходом соединен с выходом блока управления, графопостроитель своими входами соединен с выходами вычислителя и блока управления (патент RU №2326408 С1 [4]).
В отличие от известных технических решений [1, 2, 3], в которых определение поправки выполняется путем определения средней вертикальной скорости распространения звука в воде посредством определения гидрологических параметров путем измерения температуры и солености на стандартных горизонтах или путем измерения скорости распространения звука в воде на разных горизонтах путем установки дополнительных датчиков в водной среде, соединенных линией связи с носителем измерительной аппаратуры глубины, в известном техническом решении [4] дополнительно измеряют доплеровский сдвиг опорного сигнала и скорость движения носителя по внешним источникам информации, по которым определяют среднюю вертикальную скорость распространения звука в водной среде, по полученным значениям которой определяют поправку, что обеспечивает возможность непрерывного контроля за изменением средней вертикальной скорости распространения звука в морской воде в процессе выполнения мониторинга за состоянием Мирового океана, упрощает процесс определения средней вертикальной скорости распространения звука в водной среде с требуемой точностью для определения поправок измеренных значений глубин, а также исключает необходимость применения специальной дополнительной аппаратуры.
При использовании данного способа выполняются требования к точности определения глубины при промерных работах, установленное действующими нормативными документами в части обеспечения судоходства, что обусловлено возможностью измерения доплеровского сдвига опорного сигнала гидроакустического лага и скорости движения носителя измерительной аппаратуры глубины по внешним источникам информации, по которым определяют среднюю вертикальную скорость распространения звука в водной среде.
Восстановление формы рельефа дна по дискретным измерениям выполняют путем интегральных преобразований, что не приводит к увеличению ошибок наблюдений в исходных данных при обработке в отличие от известных методов, имеющих дифференциальный характер.
Методы обработки наборов однородных полиномов являются наиболее разработанными методами в компьютерной алгебре, а комбинаторный метод анализа геопространственных полей по точечным измерениям позволяет решать прикладные задачи с учетом пространственно-временной динамики этих полей.
Применение известного способа восстановления рельефа морского дна при измерениях глубин посредством гидроакустических средств, установленных на подвижных морских объектах [4] в основном ограничено решением двух технических задач - это выполнение съемки рельефа дна с последующим составлением карт для обеспечения судоходства и определение средней вертикальной скорости распространения звука в водной среде на разных горизонтах для изучения процессов перемещения водных слоев.
В то же время имеется ряд задач, включающих проведение экологического состояния морских акваторий в местах расположения морских нефтегазовых терминалов и определение параметров границ загрязненных акваторий и континентальных шельфов и определения биоресурсов.
Определение параметров границ континентального шельфа требует выполнения работ по инвентаризации и составлению берегового кадастра прибрежной зоны, включая составление карт кадастровой съемки и топографических планов.
Отсутствие карт кадастровой съемки и топографических планов морских акваторий континентального шельфа с правовой точки зрения затрудняет прибрежное гидротехническое строительство, что связано с определением границ прибрежной зоны. Кроме того, существуют возможные коллизии при определении границ морских водоохранных зон и прибрежных защитных полос, которые в соответствии с Водным кодексом РФ 2006 г., в редакции Федерального закона от 14.07.2008 №118-Ф3, отсчитываются от линии максимального прилива.
Задачей заявляемого технического решения является расширение функциональных возможностей известного способа восстановления формы рельефа морского дна при дискретных измерениях глубин посредством эхолокатора.
Поставленная задача решается за счет того, что в способе восстановления рельефа морского дна при измерениях глубин посредством гидроакустических средств, установленных на подвижных морских объектах, включающем измерение глубины с определением поправки, обусловленной местом установки гидроакустического средства, определение вертикального распределения скорости звука в воде по отраженным сигналам, путем получения данных о триангуляции точек наблюдений с последующей их интерполяцией, восстановление формы рельефа дна, построение поверхности дна, при определении поправки дополнительно измеряют доплеровский сдвиг частоты опорного сигнала гидроакустического лага, определяют скорость подвижного морского объекта посредством приемоиндикатора радио и спутниковых навигационных систем, при этом определение вертикального распределения скорости звука в воде выполняют по временным рядам плотности звуковой энергии, отраженной от внутренних неоднородностей водной среды и дна, путем регистрации всех приходящих сигналов, рассеянных от внутренних неоднородностей морской среды, от момента посылки звукового импульса до момента прихода отраженного от дна сигнала с формированием временного ряда плотности звуковой энергии, отраженной от внутренних неоднородностей морской среды и дна в соответствии с зависимостью
U(Z=0,t),
где Z - глубина в моменты времени t, а скорость звука в воде C(Z) определяют путем решения обратной задачи рассеяния, дополнительно регистрируют низкочастотные волны посредством искусственно возбуждаемых высокочастотных волн накачки, восстановление формы рельефа выполняют по относительным изменениям высоты рельефа в соответствии с неравенством
|h(r2)-h(r1)|<A|r2-r1|λ,
где h(r2)-h(r1) - разность высот в двух пространственных точках r1, r2; А (постоянная Гельдера), λ (показатель Гельдера) - положительные числа; 0<λ≤1, при этом выполняют оценку точности восстановления рельефа по величине относительного изменения высоты рельефа в зависимости от пространственного масштаба, при построении рельефа поверхности дна данные о триангуляции точек наблюдений интерпретируются в виде структуры неориентированного графа с определением длин (весов) ребер графа, отличающийся тем, что по полученным результатам измерений глубин выделяют граничную зону, разделяющую материковый склон от шельфа, которую устанавливают по коэффициенту корреляции между массивами полученных результатов измеренных глубин в переходных граничных зонах между склоном и шельфом, в переходных граничных зонах между склоном и шельфом, посредством зондирования морского дна акустическими волнами и измерениями магнитного поля выявляют планетарную структуру морского дна, по результатам измерений строят тектоническую схему переходных граничных зон, по которой устанавливают границу континентального шельфа, путем сравнения планетарных структур в переходных граничных зонах и планетарных структур суши, в процессе измерения глубин дополнительно измеряют уровень морского прилива.
Новые отличительные признаки заявляемого технического решения, заключающиеся в том, что по полученным результатам измерений глубин выделяют граничную зону, разделяющую материковый склон от шельфа, которую устанавливают по коэффициенту корреляции между массивами полученных результатов измеренных глубин в переходных граничных зонах между склоном и шельфом, в переходных граничных зонах между склоном и шельфом, посредством зондирования морского дна акустическими волнами и измерениями магнитного поля выявляют планетарную структуру морского дна, по результатам измерений строят тектоническую схему переходных граничных зон, по которой устанавливают границу континентального шельфа, путем сравнения планетарных структур в переходных граничных зонах и планетарных структур суши, в процессе измерения глубин дополнительно измеряют уровень морского прилива.
Новые отличительные признаки из известного уровня техники не выявлены, что позволяет сделать вывод о соответствии заявляемого технического решения условию патентоспособности "изобретательский уровень".
Сущность предлагаемого способа и устройства для его осуществления поясняется чертежом (фиг.1).
Фиг.1. Блок-схема устройства включает формирователь сигналов накачки 1, предназначенный для формирования двухчастотных зондирующих сигналов накачки с заданной длительностью и заданной модуляцией, формирование импульсов синхронизации и сигналов стробирования приемного тракта, параметрический излучающий тракт 2, предназначенный для усиления сигналов накачки по обеим частотам до номинального уровня (при этом в отдельных каналах может осуществляться коррекция фаз амплитуд), излучающий преобразователь накачки 3, предназначенный для преобразования электрических сигналов в акустические сигналы необходимой характеристики направленности, приемную антенну сигналов разностной частоты 4, предназначенную для формирования характеристики направленности для приема и образования акустических волн разностной частоты в электрические сигналы, приемный тракт 5, предназначенный для предварительной обработки принятых сигналов и усиления их до уровня, необходимого для регистрации принятых сигналов, графопостроитель 6, блок управления 7, вычислитель 8, гидроакустический лаг 9, многолучевой эхолот 10, высокочастотный профилограф 11, низкочастотный параметрический профилограф 12, блок пенетрометров 13, блок мареографов 14, многоканальный генератор зондирующих импульсов 15, многоканальный приемник эхосигналов 16, второй гидролокатор бокового обзора 17, блок визуализации 18.
Принципиальные схемы и принцип работы устройств 1-9 аналогичны принципиальным схемам и принципу работы устройств прототипа [4].
Многолучевой эхолот 10 предназначен для профилирования дна на рабочей частоте 204 кГц, при ширине характеристики направленности 6×10 градусов и 12×20 градусов и длительности импульсов 50, 200, 500 мкс в диапазонах глубины 5,10, 20, 50, 100 и 200 м.
Второй гидролокатор бокового обзора 17, как и первый (устройство прототипа) предназначен для съемки рельефа дна по второму борту судна. Рабочая частота гидролокаторов составляет 286 и 320 кГц, ширина характеристики направленности 1,5×50 и 3×50 градусов при длительности импульсов 50, 100 мкс и 1 мс в диапазоне глубин 10, 20, 50, 100 и 200 м.
Высокочастотный профилограф 11 предназначен для точного профилирования рельефа дна.
Низкочастотный параметрический профилограф 12 предназначен для профилирования придонных осадков с рабочими частотами 10 и 150 кГц, при ширине характеристики направленности 3×4 градуса и длительности импульсов 0,5, 1 и 2 мс в диапазоне глубин 10, 20, 50, 100 и 200 м.
Многоканальный генератор зондирующих импульсов 15 содержит излучающие тракты многолучевого эхолота 10, первого и второго гидролокаторов бокового обзора, генераторы накачки низкочастотного параметрического профилографа 12.
Многоканальный приемник эхосигналов 16 содержит приемные тракты многолучевого эхолота 10, первого и второго гидролокаторов бокового обзора, высокочастотного профилографа 11, низкочастотного параметрического профилографа 12, четыре сигнальных процессора, предназначенных для преобразования аналоговых сигналов в цифровую форму и первичную обработку этих сигналов, интерфейс связи, схему управления, формирователь сигналов, схему временной автоматической регулировки усиления и преобразователя сигналов датчиков.
Пенетрометр 13 предназначен для определения ненарушенных структур грунта в условиях его естественного залегания и представляет собой конусовидный снаряд, оснащенный датчиками, которые под воздействием силы тяжести или с помощью бура заглубляются в грунт. По измеренным коэффициентам сопротивления и трения определяются прочностные характеристики грунта. В зависимости от рабочей глубины в диапазоне 0,5-2000 м используется набор датчиков с глубиной проникновения в грунт на расстояния от 3 до 20 м. Аналогом является пенетрометры типа ТМ-153 и СРТ. Мареограф 14 предназначен для регистрации колебаний уровня моря. В зависимости от глубины водной среды используются автоматические мареографы типа АМП-20 и АММ-200.
Для получения ежесуточной информации о характере колебаний уровня моря мареографы устанавливают в разных точках морской среды в направлении от береговой линии. Информация, зарегистрированная мареографами, используется для исправления измеренных глубин при съемке рельефа дна на акваториях, где уровневые посты обычного типа не обеспечивают достаточной точности или использование их затруднено, а также для определения характера прилива и его гармонических составляющих при решении задач, связанных с безопасной эксплуатацией морских терминалов, включая нефтегазовые месторождения. Результаты измерений транслируются на судно по радио и гидроакустическому каналам связи.
Блок визуализации 18 представляет собой аппаратные вычислительные и
видео средства с программным обеспечением для отображения выбранной информации (подводные пики, впадины, магистральные трубопроводы, области загрязнения, разрезы грунта) в двумерном или трехмерном представлении.
Способ реализуется следующим образом.
При движении судна, на заданной акватории съемки рельефа дна, галсами, расположенными от береговой линии в сторону моря выполняют посредством первого и второго гидролокаторов бокового обзора, установленных с правого и левого бортов судна, выполняют съемку рельефа дна, поиск и количественную оценку продуктов биосферы (как скоплений, так и единичных экземпляров), посредством многолучевого эхолота 10 выполняют профилирование дна и поиск продуктов биосферы, посредством высокочастотного профилографа 11 выполняют профилирование дна, посредством низкочастотного параметрического профилографа 12 выполняют профилирование придонных осадков. Синхронно с зондированием поверхности дна и процессом определения глубин определяют вертикальную скорость распространения звука в водной среде посредством гидроакустического лага 9, посредством блока мареографов 14 определяют колебания уровня моря и посредством штатных судовых приемоиндикаторов спутниковых или радионавигационных систем определяют координаты и скорость судна.
По полученным данным определяю поправку к глубинам по известным зависимостям и алгоритмам, и вводят ее в вычислитель 8. Измеренные значения глубин обрабатывают по известным алгоритмам, как и в прототипе.
По измеренным значениям скорости звука в воде вертикальной плоскости определяют поле скорости звука. Определение вертикального распределения скорости звука в воде по временным рядам плотности звуковой энергии, отраженной от внутренних неоднородностей водной среды и дна, выполняют, как и в прототипе, путем регистрации всех приходящих сигналов, рассеянных от внутренних неоднородностей морской среды, от момента посылки звукового импульса до момента прихода отраженных от дна сигналов с формированием временного ряда плотности звуковой энергии, отраженной от внутренних неоднородностей морской среды и дна. При этом скорость звука в воде определяют путем решения обратной задачи рассеяния с регистрацией низкочастотных волн накачки посредством искусственно возбуждаемых высокочастотных волн накачки, по которым судят о взаимной ориентации взаимодействующих волн и величине параметра нелинейности среды.
Далее выполняется обработка временных рядов и процедура определения параметров сложно-неоднородной среды согласно алгоритмам, предложенным в прототипе. По полученным дискретным измерениям значений глубин, а также с учетом коэффициентов рассеяния звука дном, определяют класс функций, к которому принадлежит рельеф.
Проведенные исследования формы рельефа в различных пространственных масштабах (согласно прототипу) показали, что относительные изменения высоты рельефа степенным образом связаны с пространственным масштабом в виде
|h(r2)-h(r1|<А|r2-r1]λ, где
h(r2)-h(r1) - разность высот в двух пространственных точках;
r1, r2, А (постоянная Гельдера), λ (показатель Гельдера) - положительные числа; 0<λ≤1.
При этом искомая функция Н(r) выражается в виде обратного преобразования Фурье
Н(x,y)=ℑ(F(ζ)), где ζ - оператор обратного преобразования Фурье,
Здесь i - мнимая единица, ξ=(cosφ, sinφ),
Здесь
 - преобразование Радона функции
- преобразование Радона функции
Н(x,y) на (x,y)∈R×R=Ω, т.е. интегральное преобразование, относящее функции Н(x,y) на Ω ее интегралы по всевозможным прямым (относительно евклидовой длины)
x=-t sinφ+pcosφ; y=t cosφ+psinφ.
Для финитной функции Н(x,y) в односвязной области Ω точность оценки будет лучше точности традиционных процедур интерполяции.
Определяют погрешность Θ(Н) восстановления рельефа в виде максимального значения абсолютной величины разности между истиной поверхностью и восстановленной
где К - общее число первых моментов, обеспеченных точностью. Точности оценки моментов δ(Ik) будут определяться структурой расположения точек измерения.
Для оптимального распределенных точек (измерений), которые всегда можно определить на исходном множестве точек (см., например, Соболь И.М. Многомерные квадратурные формулы и функции Хаара. М., Наука, 1969, с.288) с точностью оценки момента для нормированной функции в соответствии с выражением δ(Ik)≤2/Nk.
Восстановление формы рельефа морского дна может выполняться после каждой серии дискретных измерений.
При исследовании подводных объектов, например морских участков магистральных трубопроводов, по зарегистрированным эхосигналам, подводные объекты различают по их частотным характеристикам и оценивают их размер по интервалу частот между минимальными и максимальными значениями силы цели на частотных зависимостях (см., например, Клей К., Медвин Г. Акустическая океанография. Основы и применения. М.: Мир, 1980, - 580 с.). При этом величина силы цели анализируется в зависимости от произведения ka, где а - радиус цели, k=2π/λ - волновое число. Для акустически жестких объектов сферической формы величина силы цели в промежуточной области между релеевским и геометрическим рассеяниями, т.е. в области, где 1<ka<10 колеблется, асимптотически приближаясь к своему постоянному значению при ka>>1 (см., например, Урик Р.Дж. Основы гидроакустики. Л.: Судостроение, 1978. - 448 с.). Причина этих колебаний, как показали теоретические и экспериментальные исследования, заключается в переизлучении поверхностных и дифрагированных волн, которые вносят свой вклад в процесс формирования эхосигнала наряду с зеркальным отражением. Возникающая интерференция между указанными типами волн при достаточной длительности зондирующих импульсов приводит к осцилляциям в частотных зависимостях силы цели. Уровень этих осцилляции, количество, интервал между ними определяются физическими параметрами объекта, его геометрическими размерами, что позволяет использовать в качестве одного из простых и достаточно информативных признаков классификации и частотную зависимость силы цели. Оценка размеров объектов в совокупности с учетом абсолютной величины силы цели является вполне достаточным для того, чтобы различать объекты по их габаритам и, на основании этого, принимать решение о принадлежности к тому или иному классу.
При выполненных экспериментальных исследованиях задача рассеяния звука на акустически жесткой упругой сфере, находящейся за областью эффективного нелинейного взаимодействия волн, решалась в соответствии с известной методикой (см., например, У.К.Метсавээр, Я.А.Векслер, Н.Д.Кутсер. Эхо-сигналы от упругих объектов. Таллин: Академия наук ЭССР, 1974, 214 с.), которая позволяет исследовать с достаточной степенью точности звуковые поля отражающих объектов в однородной среде в случаях, когда можно пренебречь эффектом нелинейного взаимодействия отраженных от объекта волн накачки. Эти случаи включают в себя вариант рассеяния от тел, расположенных в дальней зоне параметрической антенны, либо рассеяния от сфер, расположенных в однородной среде, обладающей значительным поглощением для волн накачки, например, в водонасыщенном однородном иле.
Анализ результатов экспериментальных исследований показал, что для объектов, выполненных в виде сплошной стальной сферы, форма отраженного сигнала зависит от соотношения между диаметром сферы и длиной акустической волны. В случае использования сфер из акустически мягкого материала (пенопласта) или полой наполненной воздухом сферы с тонкой стенкой форма отраженных импульсов в местах минимумов на частотных зависимостях силы цели отличается от формы импульса, отраженного от сплошной сферы, что позволяет по форме огибающей
эхосигнала отличать сферы, выполненные из акустически жестких и мягких материалов.
По измеренным коэффициентам сопротивления и трения посредством блока пенетрометров 13 определяют прочностные характеристики грунта. Пенетрометры представляют собой конусовидные снаряды, оснащенные датчиками, которые под действием силы тяжести или с помощью бура заглубляются в грунт и устанавливаются с судна в направлении от береговой линии в глубь моря. При этом измеряют коэффициенты сопротивления и трения, по которым определяют прочностные характеристики грунта на нескольких горизонтах по глубине грунта в диапазоне от 3 до 20 м по всей длине акватории от береговой линии. При последующем анализе устанавливают структуру грунта и выносят суждение о принадлежности той или иной структуры подводного грунта к структуре грунта континентального шельфа.
Картирование информации осуществляется нанесением геодезических координат точек отражения гидроакустических сигналов от морского дна на планшет, который строится путем сопряжения топографических и навигационных растровых карт в следующей последовательности:
- растр навигационной карты в проекции Меркатора подвергается векторизации береговой линии навигационной карты;
- выполняется выборка участка, соответствующего морской акватории, на которой производится съемка рельефа дна с учетом векторизации береговой линии навигационной карты;
- производится запись в итоговый растр навигационной карты;
- растр топографической карты в проекции Гаусса-Крюгера приводится к масштабу навигационной карты;
- выполняется преобразование координат проекции Гаусса-Крюгера в географические координаты;
- выполняется преобразование географических координат в координаты проекции Меркатора;
- производится выборка участка растра, соответствующего сухопутной (береговой) области;
- выполняется запись в итоговый растр топографической карты;
- по результатам записей в итоговые растры навигационной и топографической карты строится итоговая растровая карта совмещенной навигационной и топографической информации в Меркаторской проекции;
- на итоговой растровой карте, выводимой на устройство индикации, также отображается путь судна.
При картирование результатов характеристик грунтов континентального шельфа наносят геодезические координаты точек установки пенетрометров с отображением разрезов грунта. При этом расстояние между разрезами не превышает половины минимального диаметра неоднородностей, а при регистрации неоднородностей частота измерений на разрезах составляет более 1/8÷1/10 диаметра неоднородностей.
Обработка и визуализация зарегистрированных областей рельефа дна, грунта, подводных объектов осуществляется посредством вычислителя 8, графопостроителя 6 и блока визуализации 18.
По полученным результатам измерений глубин выделяют граничную зону, разделяющую материковый склон от шельфа, которую устанавливают по коэффициенту корреляции между массивами полученных результатов измеренных глубин в переходных граничных зонах между склоном и шельфом, в переходных граничных зонах между склоном и шельфом, посредством зондирования морского дна акустическими волнами и измерениями магнитного поля, и по измеренным коэффициентам сопротивления и трения посредством блока пенетрометров 13 определяют прочностные характеристики грунта, выявляют планетарную структуру морского дна, по результатам измерений строят тектоническую схему переходных граничных зон, по которой устанавливают границу континентального шельфа, путем сравнения планетарных структур в переходных граничных зонах и планетарных структур суши.
При визуализации зарегистрированной области рельефа дна и планетарных структур суши используется блок визуализации, построенный на основе базовых модулей геоинформационных систем (ГИС) типа «Нева» и «Океан» (Информационный бюллетень. // Журнал М.: ГИС-Ассоциация 1997, №2(4), 2(9), 4(9). Ежегодный обзор. Выпуск 2 (1995). Приложение к "Информационному бюллетеню ГИС-ассоциации". - М.: ГИС-Ассоциация, 1996. - 372 с. Коновалова Н.В., Капралов Е.Г. Введение в ГИС. Учебное пособие. Издательство Петрозаводского университета, 1995. - 148 с. Основы ГИС: теория и практика. WinGIS - руководство пользователя. Мартыненко А.И., Бугаевский Ю.Л., Шибалов С.Н., Фадеев В.А. Издание второе. Издательство Инженерная Экология, М., 1995. - 232 с.).
Основными (функциями ГИС «Нева» являются:
- создание (обновление) и обработка векторных карт с использованием материалов космической съемки, аэрофотосъемки, тиражных оттисков, растровых изображений, текстовых данных, описывающих объекты местности, результатов полевых измерений;
- создание и использование иерархической структуры базы данных электронных карт, имеющей уровни: проект, листы карты, слой объектов, отдельные объекты местности;
- редактирование содержимого базы данных электронных карт с использованием графического интерфейса пользователя: создание нового уровня, обновление, удаление, копирование и восстановление объектов карты;
- визуализация содержимого базы данных в условных знаках, принятых для топографических, обзорно-географических, кадастровых и других видов карт;
- поддержка стандартных систем классификации, кодирования объектов и их характеристик в соответствии с требованиями Роскартографии;
- поддержка пользовательских условных знаков, слоев, объектов и их характеристик;
- выполнение расчетных операций: определение площади, длины, периметра. построение зон отсечения, ведение статистики по характеристикам объектов;
- вывод на внешние устройства печати изображения электронной карты в принятых условных знаках; изменение состава объектов и масштаба карты при печати;
- подготовка векторных карт к изданию в соответствии с действующими нормативными документами или требованиями заказчика для последующей печати на полиграфию.
ГИС "Нева" позволяет отображать созданные (обновленные) векторные, растровые, матричные карты в различных форматах, подготавливать карты к изданию и решать прикладные задачи, показывая полученные результаты как на векторных топографических картах, так и на трехмерных моделях местности. ГИС "Нева" включает в себя ряд прикладных задач, список их постоянно расширяется.
ГИС «Нева» позволяет автоматизировать многие процессы создания и редактирования объектов, что приводит к экономии времени на создание и обновление карты.
Основными возможностями программы являются:
- информация может быть представлена в различных видах проекций (более 30-ти проекций: равноугольная Гаусса-Крюгера, Меркатора равноугольная (UTM), цилиндрическая Меркатора, коническая равноугольная, коническая равноугольная Ламберта, коническая равнопромежуточная, коническая равнопромежуточная (ПКО Картография), поликоническая простая, азимутальная нормальная, азимутальная косая равнопромежуточная Постеля, азимутальная косая равновеликая Ламберта и др.) и эллипсоидов (Красовского, Кларка, Бесселя, Евереста, др.); обзорно-географические карты масштабов 1:500000-1:10000000 имеют унифицированную математическую основу;
- формирование зарамочного оформления карты с легендой на языке Заказчика;
- электронные карты могут быть объединены в рамках номенклатурных листов масштаба 1:1000000 или района работ из любого количества листов;
- одни и те же цифровые карты могут быть доступны для обработки в локальной сети произвольному числу пользователей;
- автоматическое построение горизонталей рельефа и векторизация контуров местности по стереомодели;
- возможность связи объектов цифровой карты с векторизуемыми объектами по стереомодели и с любой внешней базой данных, а также есть возможность одновременно просматривать фрагмент карты в окне редактора и отслеживать его положение относительно всех загруженных карт;
- установление порогов (уровней) отображения определяет с какого масштаба увеличения карты начинает или перестает отображаться на экране определенный объект, слой или карта. Наличие уровней позволяет управлять видом карты при разных увеличениях и избегать перенасыщенности изображения мелкими или избыточными деталями;
- описание видов объектов топографических и тематических векторных карт, семантических характеристик, слоев, в которые объединяются объекты, хранится в библиотеке условных знаков;
- создание матрицы высот на основе рельефа в виде регулярной цифровой модели из точек с отметками высот (могут быть выданы в формате ASCII);
- построение трехмерной модели местности для решения различных прикладных задач, отображение сечения рельефа в произвольном направлении, создание профиля местности;
- отображение матрицы высот рельефа в виде гипсометрической пространственной модели местности с подбором различной цветовой палитры; совмещение гипсометрической пространственной модели и векторной карты;
- вычисление по векторной карте расстояний, азимутов, периметров, площадей объектов;
- возможность определения высот объектов (например, зданий) в режиме стереомодели;
- печать любых выделенных фрагментов векторной карты или всей карты на различных устройствах вывода, включая вывод на пленку по слоям для издания карт на картфабриках;
- базовый обменный формат представления данных системы "Нева" - DM. Имеются конверторы в другие форматы: DBF, SXF, MapInfo, MIF/MID, интегральный файл и другие.
- Комплекс создания рельефных карт обеспечивает подготовку по векторной топографической карте картографической основы, отвечающей требованиям полиграфии, в необходимом масштабе и получение матриц высот рельефа местности для получения форм рельефа, совместный просмотр подготовленной основы и рассчитанных форм рельефа на экране компьютера для контроля качества работ и уточнения вертикального масштаба.
- Процедура трансформирования векторных карт обеспечивает приведение цифровых данных к заданному масштабу, проекции, перевод электронной карты в проекцию и систему координат Заказчика по имеющимся параметрам или с использованием опорных точек.
- Процедура сводки смежных листов электронной карты позволяет за счет автоматизации процесса контроля и корректуры идентичности объектов, выходящих на смежные рамки листов, уменьшить время на создание электронной карты.
- Процедура проекта позволяет организовать одновременную работу со многими электронными картами, объединить электронные карты в единую область, например в рамках листа карты масштаба 1:1000000 объединить электронные карты масштаба 1:50000.
- Процедура нарезки листов обеспечивает изменение компоновки, разграфки, проекции, масштаба электронной карты.
Геоинформационная система позволяет совмещать топографическую карту на прибрежную полосу с морской картой.
ГИС "Нева" принята на вооружение в Топографической службе Вооруженных сил Российской Федерации и Роскартографии.
Основанная на базовом модуле программы «Нева» DMW.EXE технология «Океан» позволяет создавать морские карты различного назначения всего масштабного ряда как в традиционных, так и в произвольных масштабах. Карты создаются со строгой математической основой во всех проекциях и системах высот, предусмотренных в морских картах.
Комплекс программных средств с технологией «Океан» принят на вооружение в Главном управлении навигации и океанографии Министерства Обороны РФ.
Реализация заявляемого технического решения технической трудности не представляет, так как оно может быть реализовано на базе вычислительных средств и штатных судовых измерителей глубины, технических средств навигации и средств навигационного обеспечения.
Источники информации
1. Авторское свидетельство SU №1103171.
2. Патент RU №2045081 С1.
3. Авторское свидетельство SU №1829019 A1.
4. Патент RU №2326408 C1.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ВОССТАНОВЛЕНИЯ РЕЛЬЕФА МОРСКОГО ДНА ПРИ ИЗМЕРЕНИЯХ ГЛУБИН ПОСРЕДСТВОМ ГИДРОАКУСТИЧЕСКИХ СРЕДСТВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2429507C1 |
| СПОСОБ ГЕОХИМИЧЕСКОЙ РАЗВЕДКИ ДЛЯ ГЕОЭКОЛОГИЧЕСКОГО МОНИТОРИНГА МОРСКИХ НЕФТЕГАЗОНОСНЫХ АКВАТОРИЙ | 2012 |
|
RU2513630C1 |
| СПОСОБ СЪЕМКИ РЕЛЬЕФА ДНА АКВАТОРИИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2434246C1 |
| СПОСОБ ВОССТАНОВЛЕНИЯ ФОРМЫ РЕЛЬЕФА МОРСКОГО ДНА ПРИ ДИСКРЕТНЫХ ИЗМЕРЕНИЯХ ГЛУБИН ПОСРЕДСТВОМ ГИДРОАКУСТИЧЕСКИХ СРЕДСТВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2326408C1 |
| СПОСОБ СЪЕМКИ РЕЛЬЕФА ДНА АКВАТОРИИ И УСТРОЙСТВО ДЛЯ СЪЕМКИ РЕЛЬЕФА ДНА АКВАТОРИИ | 2012 |
|
RU2519269C1 |
| СПОСОБ ОПЕРАТИВНОГО ИССЛЕДОВАНИЯ АТМОСФЕРЫ, ЗЕМНОЙ ПОВЕРХНОСТИ И ОКЕАНА | 2010 |
|
RU2436134C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ГЛУБИН АКВАТОРИИ ГИДРОЛОКАТОРОМ БОКОВОГО ОБЗОРА И ГИДРОЛОКАТОР БОКОВОГО ОБЗОРА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2484499C1 |
| СПОСОБ МОРСКОЙ ГРАВИМЕТРИЧЕСКОЙ СЪЕМКИ | 2010 |
|
RU2440592C2 |
| ПОДВИЖНЫЙ МОРСКОЙ АППАРАТ ДЛЯ ПОДВОДНЫХ ИССЛЕДОВАНИЙ | 2011 |
|
RU2478059C1 |
| СПОСОБ РЕГИСТРАЦИИ СЕЙСМИЧЕСКИХ СИГНАЛОВ НА АКВАТОРИИ МОРЯ ПРИ ПОИСКЕ ПОДВОДНЫХ ЗАЛЕЖЕЙ УГЛЕВОДОРОДОВ | 2011 |
|
RU2483330C1 |
Изобретение относится к области гидроакустики и может быть использовано для восстановления рельефа морского дна. Сущность: измеряют глубину дна с определением поправки, обусловленной местом установки гидроакустического средства. Определяют вертикальное распределение скорости звука в воде по отраженным сигналам. Восстанавливают форму рельефа дна. По полученным результатам измерений глубин выделяют граничную зону, отделяющую материковый склон от шельфа. В переходных граничных зонах между склоном и шельфом посредством зондирования морского дна акустическими волнами и измерениями магнитного поля выявляют планетарную структуру морского дна. По результатам измерений строят тектоническую схему переходных граничных зон, по которой устанавливают границу континентального шельфа путем сравнения планетарных структур в переходных граничных зонах и планетарных структур суши. В процессе измерения глубин дополнительно изменяют уровень морского прилива. Технический результат: расширение функциональных возможностей. 1 ил.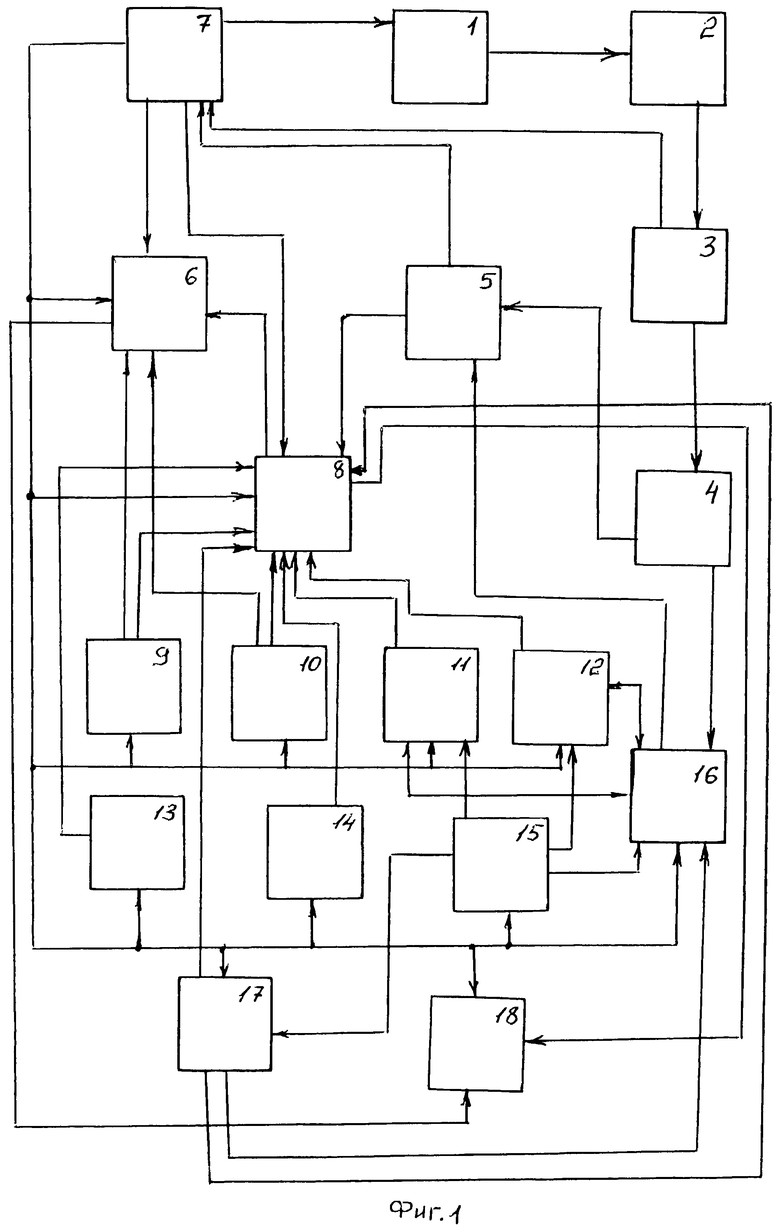
Способ восстановления рельефа морского дна при измерениях глубин посредством гидроакустических средств, установленных на подвижных морских объектах, включающий измерение глубины с определением поправки, обусловленной местом установки гидроакустического средства, определение вертикального распределения скорости звука в воде по отраженным сигналам путем получения данных о триангуляции точек наблюдений с последующей их интерполяцией, восстановление формы рельефа дна, построение поверхности дна, при определении поправки дополнительно измеряют доплеровский сдвиг частоты опорного сигнала гидроакустического лага, определяют скорость подвижного морского объекта посредством приемоиндикатора радио- и спутниковых навигационных систем, при этом определение вертикального распределения скорости звука в воде выполняют по временным рядам плотности звуковой энергии, отраженной от внутренних неоднородностей водной среды и дна, путем регистрации всех приходящих сигналов, рассеянных от внутренних неоднородностей морской среды от момента посылки звукового импульса до момента прихода отраженного от дна сигнала, с формированием временного ряда плотности звуковой энергии, отраженной от внутренних неоднородностей морской среды и дна в соответствии с зависимостью U(Z=0,t), где Z - глубина в моменты времени t, а скорость звука в воде C(Z) определяют путем решения обратной задачи рассеяния, дополнительно регистрируют низкочастотные волны посредством искусственно возбуждаемых высокочастотных волн накачки, восстановление формы рельефа выполняют по относительным изменениям высоты рельефа в соответствии с неравенством |h(r2)-h(r1)|<A|r2-r1|λ, где h(r2)-h(r1) - разность высот в двух пространственных точках r1, r2; А (постоянная Гельдера), λ, (показатель Гельдера) - положительные числа; 0<λ≤1, при этом выполняют оценку точности восстановления рельефа по величине относительного изменения высоты рельефа в зависимости от пространственного масштаба, при построении рельефа поверхности дна данные о триангуляции точек наблюдений интерпретируются в виде структуры неориентированного графа с определением длин (весов) ребер графа, отличающийся тем, что по полученным результатам измерений глубин выделяют граничную зону, разделяющую материковый склон и шельф, которую устанавливают по коэффициенту корреляции между массивами полученных результатов измеренных глубин в переходных граничных зонах между склоном и шельфом, в переходных граничных зонах между склоном и шельфом посредством зондирования морского дна акустическими волнами и измерениями магнитного поля выявляют планетарную структуру морского дна, по результатам измерений строят тектоническую схему переходных граничных зон, по которой устанавливают границу континентального шельфа путем сравнения планетарных структур в переходных граничных зонах и планетарных структур суши, в процессе измерения глубин дополнительно изменяют уровень морского прилива.
| СПОСОБ ВОССТАНОВЛЕНИЯ ФОРМЫ РЕЛЬЕФА МОРСКОГО ДНА ПРИ ДИСКРЕТНЫХ ИЗМЕРЕНИЯХ ГЛУБИН ПОСРЕДСТВОМ ГИДРОАКУСТИЧЕСКИХ СРЕДСТВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2326408C1 |
| СПОСОБ СЪЕМКИ РЕЛЬЕФА ДНА АКВАТОРИИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2340916C1 |
| Способ очистки технической бензойной кислоты | 1940 |
|
SU60204A1 |
| Захватное устройство | 1987 |
|
SU1426786A1 |
| US 4404665 A, 13.09.1983. | |||

