Изобретение относится к средствам дистанционного обеспечения контроля движения железнодорожного транспорта и может быть использовано для осуществления удаленного управления и мониторинга систем скоростного электропоезда посредством защищенных каналов связи.
Известно устройство для автоматизированного управления тяговым подвижным составом, содержащее средства управления, связанные с блоком регистрации, внешним блоком накопления информации, блоками ввода аналоговых и дискретных сигналов, измерительным блоком и установленными на пульте машиниста средствами индикации, средства управления включают в себя системный блок, состоящий из мастер-модуля, модуля питания, модуля CPU и внутреннего дублирующего блока накопления информации, при этом мастер-модуль предназначен для выполнения сетевого управления с возможностью использования протокола верхнего уровня CAN, управления нижнего уровня при реализации модулем CPU функции автоведения, связи с блоками комплекса по системному CAN-интерфейсу, связи с внешними системами по гальванически развязанному CAN-интерфейсу, загрузке программного обеспечения и данных, хранящихся на внешнем блоке накопления информации в блоки комплекса по CAN-интерфейсу, циклической перезаписи информации с внешнего блока накопления информации на внутренний дублирующий блок накопления информации, задания системного времени, контроля температуры внутри системного блока, при этом мастер-модуль установлен в установочном месте, предусмотренном в пульте управления локомотивом, с возможностью обмена информацией с центральным вычислителем пульта управления, связанным посредством общей информационной шины с микропроцессорным блоком управления и блоком связи аппаратуры микропроцессорной системы управления локомотивом, блоком согласования интерфейсов аппаратуры комплекса локомотивных устройств безопасности, блоком контроллера и блоком приемника аппаратуры системы контроля бодрствования машиниста (RU 2254256, B61L 15/00, 20.06.2005).
Известное устройство основано на применении свойств и функций CAN шин с возможностью использования протокола верхнего уровня CAN, управления нижнего уровня при реализации модулем CPU функции автоведения, связи с блоками комплекса по системному CAN-интерфейсу, связи с внешними системами по гальванически развязанному CAN-интерфейсу, загрузке программного обеспечения и данных, хранящихся на внешнем блоке накопления информации в блоки комплекса по CAN-интерфейсу, циклической перезаписи информации с внешнего блока накопления информации на внутренний дублирующий блок накопления информации, задания системного времени, контроля температуры внутри системного блока, при этом мастер-модуль установлен в установочном месте, предусмотренном в пульте управления локомотивом, с возможностью обмена информацией с центральным вычислителем пульта управления, связанным посредством общей информационной шины с микропроцессорным блоком управления и блоком связи аппаратуры микропроцессорной системы управления локомотивом, блоком согласования интерфейсов аппаратуры комплекса локомотивных устройств безопасности, блоком контроллера и блоком приемника аппаратуры системы контроля бодрствования машиниста. Данное устройство принято в качестве прототипа.
К недостаткам этого устройства следует отнести ограниченность информационного потока от датчиков, обусловленную тем, что все устройства в системе объединены при помощи CAN-шины, которая не позволяет пропускать большие потоки информации, например, видео, и перенаправлять ответственную информацию в диспетчерский пункт.
Технический результат изобретения заключается в создании системы, обеспечивающей устойчивую связь, визуальный контроль параметров и дистанционное управление скоростным электропоездом посредством защищенных каналов радиосвязи, передачу информации о состоянии узлов и агрегатов электропоезда, управление внешними исполнительными устройствами посредством передачи команд в микропроцессорную систему управления и диагностики скоростного электропоезда.
Технический результат достигается тем, что в системе связи и дистанционного управления для скоростного электропоезда, содержащей на электропоезде блок микропроцессорной системы управления и диагностики скоростного электропоезда, подключенный к CAN интерфейсу, согласно изобретению электропоезд снабжен блоком системы технического зрения и средством связи и синхронизации, включающим в себя процессор с подключенным к нему приемником спутниковой навигационной системы, соединенным с антенной, к которой подключен модем, соединенный с процессором через блок шифрации и дешифрации, при этом средство связи и синхронизации подключено к CAN интерфейсу, а посредством высокоскоростного интерфейса Ethernet соединено с блоком системы технического зрения, по линии связи LTE средство связи и синхронизации соединено со стационарным центром дистанционного контроля и управления, включающим в себя последовательно соединенные антенну, модем, блок шифрации и дешифрации, вычислитель и пульт управления, с возможностью вывода получаемой информации.
Техническое решение с вышеперечисленной совокупностью признаков обеспечивает достижение технического результата за счет непрерывного информационного обмена между центром дистанционного контроля и управления и электропоездом посредством средства связи и синхронизации и управления скоростным электропоездом посредством специализированной информационно - управляющей CAN-шины, обеспечивающей гарантию доставки информационных посылок, защиту от изменения информации и детерминированную адресацию устройств, с одновременным взаимодействием устройства с системой технического зрения посредством скоростного интерфейса Ethernet, с одновременным сбором информации о точном времени от приемника спутниковой навигационной системы для синхронизации всех данных, агрегацией и обработкой информации для выдачи команд управления в микропроцессорную систему управления и диагностики скоростного электропоезда.
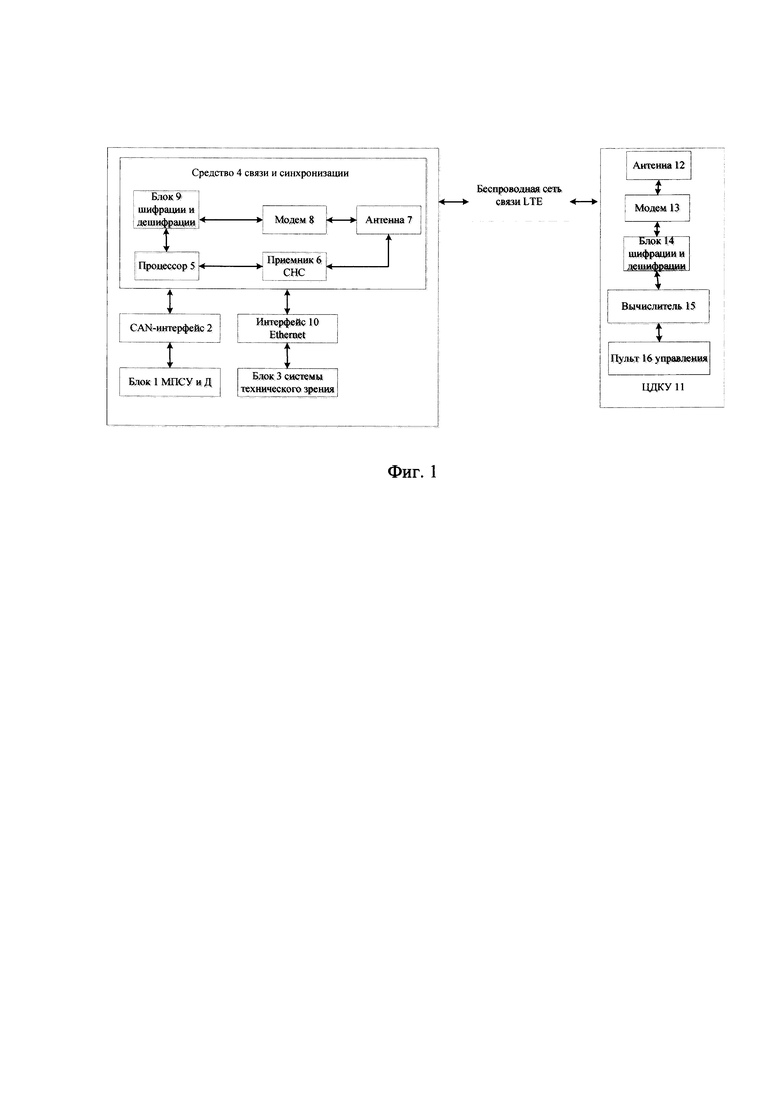
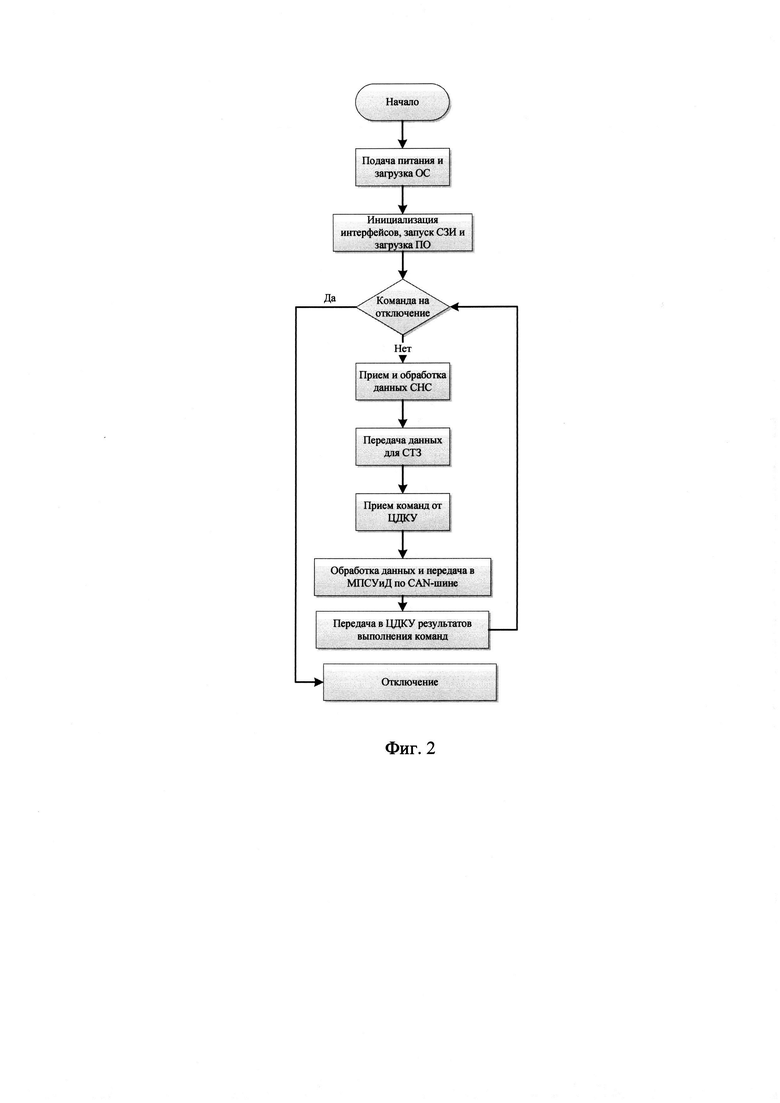
На чертеже (фиг. 1) представлена блок-схема системы связи и дистанционного управления для скоростного электропоезда. На фиг. 2 представлен алгоритм работы системы связи и дистанционного управления для скоростного электропоезда.
Система связи и дистанционного управления для скоростного электропоезда содержит на электропоезде блок 1 микропроцессорной системы управления и диагностики (МПСУиД) скоростного электропоезда, подключенный к CAN интерфейсу 2, блок 3 системы технического зрения (СТЗ) и средство 4 связи и синхронизации, включающее в себя процессор 5 с подключенным к нему приемником 6 спутниковой навигационной системы (СНС), соединенным с антенной 7, к которой подключен модем 8, соединенный с процессором 5 через блок 9 шифрации и дешифрации, при этом средство 4 связи и синхронизации подключено через CAN интерфейс 2 к блоку 1 микропроцессорной системы управления и диагностики (МПСУиД), а посредством высокоскоростного интерфейса 10 Ethernet соединено с блоком 3 системы технического зрения, по линии беспроводной сети связи LTE средство 4 связи и синхронизации соединено со стационарным центром И дистанционного контроля и управления (ЦДКУ), включающим в себя последовательно соединенные антенну 12, модем 13, блок 14 шифрации и дешифрации, вычислитель 15 и пульт 16 управления, с возможностью вывода получаемой информации.
Суть работы системы заключается в следующем. Процессор 5 посредством операционной системы и прикладного программного обеспечения взаимодействует с приемником 6 спутниковой навигационной системы для синхронизации всех данных, обрабатывает данные, поступающие с датчиков (на чертеже не показаны) блока 3 системы технического зрения для осуществления реализации технического зрения и данные телеметрии от блока 1 МПСУиД электропоезда с передачей этих данных через блок 9 шифрации и дешифрации для защиты и кодирования информации от несанкционированного доступа третьих лиц, модем 8 и антенну 7 посредством линии беспроводной сети связи LTE на стационарную часть (центр 11 дистанционного контроля и управления) диагностической информации о состоянии систем электропоезда на пульт 16 управления, с возможностью вывода получаемой информации, через последовательно соединенные антенну 12, модем 13, блок 14 шифрации и дешифрации для декодирования информации и обработки его в вычислителе 15. Дистанционное управление скоростным электропоездом осуществляется в обратном порядке.
Система связи и дистанционного управления для скоростного электропоезда работает следующим образом.
После подачи питания на средство 4 связи и синхронизации и загрузки операционной системы в процессоре 5 выполняется процедура инициализации, в которой выполняются следующие действия: происходит инициализация интерфейсов, считывание системного времени от приемника 6 спутниковой навигационной системы для синхронизации данных по времени и запускаются средства защиты информации: блок 9 шифрации и дешифрации в составе средства 4 связи и синхронизации скоростного электропоезда и блока 14 шифрации и дешифрации в составе центра 11 дистанционного контроля и управления, после чего происходит инициализация и запуск прикладных процессов. Шифрация данных необходима для кодирования информации с целью недопущения использования их третьими лицами и воздействия на управление электропоездом при информационных и кибер атаках извне. В ходе выполнения фонового процесса выполняются следующие действия: происходит проверка подключения устройств через CAN интерфейс 2 и интерфейс 10 Ethernet, далее выполняется прием и обработка данных от пульта 16 управления (ЦДКУ), определяется текущий режим управления скоростным электропоездом, выполняется разбор принятых данных (телеметрии) через CAN интерфейс 2 от блока 1 МПСУиД электропоезда, формируются управляющие команды и передаются посредством CAN интерфейса 2 в блок 1 МПСУиД, после чего происходит формирование и передача ответных сообщений на стационарную часть центра 11 дистанционного контроля и управления электропоездом и выполняется технологическая регистрация параметров. Взаимодействие средства 4 связи и синхронизации с блоком 3 системы технического зрения происходит посредством интерфейса 10 Ethernet. Получаемые данные от датчиков блока 3 системы технического зрения должны содержать признак исправности системы технического зрения, сигнал об обнаруженном препятствии в габаритах следования скоростного электропоезда, а также признаки команд торможения и подачи сигнала, а именно значение до достижения целевой заданной скорости и расстояния до обнаруженного препятствия. Взаимодействие средства 4 связи и синхронизации с блоком 1 МПСУиД происходит посредством CAN-интерфейса путем получения входных данных о скорости движения электропоезда и состоянии систем и агрегатов скоростного электропоезда, а также направления управляющих сигналов от оператора-машиниста ЦДКУ 11 для осуществления дистанционного управления электропоездом в случае нештатных ситуации и аварийного торможения.
Таким образом, предлагаемое техническое решение позволяет обеспечить синхронизированное дистанционное управление скоростным электропоездом за счет передачи телеметрии, управляющих команд и видеопотока с набора датчиков блока системы технического зрения для осуществления безопасного движения и управления скоростным электропоездом с одновременным получением информации об окружающей среде, внутренних параметрах систем электропоезда и контролем системы связи в режиме реального времени (с блока МПСУиД) с возможностью организации управления скоростным электропоездом без участия машиниста и с использованием отдельного организованного удаленного рабочего места машиниста - оператора Центра дистанционного контроля и управления.
| название | год | авторы | номер документа |
|---|---|---|---|
| Инфраструктурная система технического зрения обеспечения безопасности движения поездов в области ограниченной видимости | 2020 |
|
RU2752155C1 |
| МИКРОПРОЦЕССОРНАЯ СИСТЕМА УПРАВЛЕНИЯ И ДИАГНОСТИКИ ЭЛЕКТРОПОЕЗДА | 2018 |
|
RU2733594C2 |
| СПОСОБ ПЕРЕДАЧИ ИНФОРМАЦИОННЫХ СООБЩЕНИЙ В МИКРОПРОЦЕССОРНЫХ СИСТЕМАХ УПРАВЛЕНИЯ И ДИАГНОСТИКИ | 2015 |
|
RU2577196C1 |
| БЕЗОПАСНЫЙ ЛОКОМОТИВНЫЙ ОБЪЕДИНЕННЫЙ КОМПЛЕКС | 2011 |
|
RU2475396C1 |
| Бортовое навигационное коммуникационное устройство | 2017 |
|
RU2657152C1 |
| АВТОМАТИЧЕСКАЯ НРЛС С УВЕЛИЧЕННЫМ НЕОБСЛУЖИВАЕМЫМ ПЕРИОДОМ АВТОНОМНОЙ РАБОТЫ | 2012 |
|
RU2522910C2 |
| БЕЗОПАСНЫЙ ЛОКОМОТИВНЫЙ ОБЪЕДИНЕННЫЙ КОМПЛЕКС | 2011 |
|
RU2474507C2 |
| СПОСОБ МОНИТОРИНГА СОСТОЯНИЯ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ ПРИ ДВИЖЕНИИ ПОЕЗДА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2022 |
|
RU2829561C2 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ТОРМОЖЕНИЕМ ПОЕЗДОВ КОМПЛЕКСНАЯ | 2019 |
|
RU2732495C1 |
| СТАНЦИОННОЕ УСТРОЙСТВО ДЛЯ СИСТЕМЫ РЕГУЛИРОВАНИЯ ДВИЖЕНИЯ ПОЕЗДОВ | 2015 |
|
RU2578638C1 |
Изобретение относится к средствам мониторинга систем электропоездов и дистанционного управления их движением. Система содержит на электропоезде блок микропроцессорной системы управления и диагностики скоростного электропоезда, подключенный к CAN интерфейсу, блок системы технического зрения и средство связи и синхронизации, включающее в себя процессор с подключенным к нему приемником спутниковой навигационной системы, соединенным с антенной, к которой подключен модем, соединенный с процессором через блок шифрации и дешифрации, при этом средство связи и синхронизации подключено к CAN интерфейсу, а посредством высокоскоростного интерфейса Ethernet соединено с блоком системы технического зрения, по линии связи LTE средство связи и синхронизации соединено со стационарным центром дистанционного контроля и управления. Причем центр включает в себя последовательно соединенные антенну, модем, блок шифрации и дешифрации, вычислитель и пульт управления. Достигается возможность обеспечения визуального контроля и дистанционного управления скоростным электропоездом. 2 ил.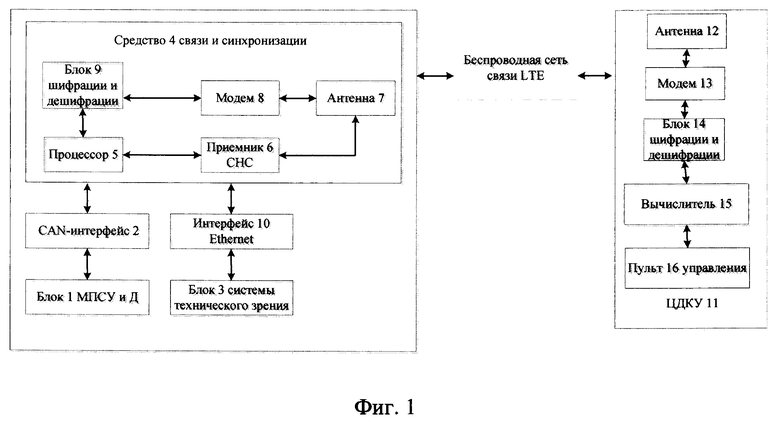
Система связи и дистанционного управления для скоростного электропоезда, содержащая на электропоезде блок микропроцессорной системы управления и диагностики скоростного электропоезда, подключенный к CAN интерфейсу, отличающаяся тем, что электропоезд снабжен блоком системы технического зрения и средством связи и синхронизации, включающим в себя процессор с подключенным к нему приемником спутниковой навигационной системы, соединенным с антенной, к которой подключен модем, соединенный с процессором через блок шифрации и дешифрации, при этом средство связи и синхронизации подключено к CAN интерфейсу, а посредством высокоскоростного интерфейса Ethernet соединено с блоком системы технического зрения, по линии беспроводной сети связи LTE средство связи и синхронизации соединено со стационарным центром дистанционного контроля и управления, включающим в себя последовательно соединенные антенну, модем, блок шифрации и дешифрации, вычислитель и пульт управления, с возможностью вывода получаемой информации.
| "Применение систем машинного зрения для железнодорожного транспорта" (найдено в сети интернет: https://web.archive.org/web/20210305233309/https://ict.moscow/presentation/primenenie-sistem-mashinnogo-zreniia-dlia-zheleznodorozhnogo-transporta/ ), опубликовано 05.03.2021 по данным web.archive.org | |||
| Антон Попов, Павел Мащенко "Машинное зрение: как |

