Изобретение относится к средствам обеспечения безопасности на железнодорожном транспорте и может быть использовано для определения и идентификации объектов на путях железнодорожного транспорта или в габаритах поезда, передачи данных для оповещения машиниста скоростного поезда и машиниста-оператора центра дистанционного контроля и управления о наличии препятствий в зоне ограниченной видимости и оповещения нарушителей в области движения скоростных поездов.
Известно устройство предупреждения о падении посторонних предметов на путь, содержащее датчики обнаружения посторонних предметов, закрепленные на основаниях, установленных на платформе, соединенные в единую электрическую цепь и подключенные к кабельным концевым муфтам, причем токопередающие поверхности электрической цепи в местах соединения имеют антикоррозионное токопроводящее покрытие, а датчики выполнены в виде датчиков дальнодействующего типа (до 10 м), например, в виде ультразвуковых датчиков движения, и введены выполненные из влагостойкого материала защитные корпуса, в которых размещены датчики (RU 180631, B61L 23/00, 19.06.2018).
Известное устройство основано на применении установленных в зоне повышенной опасности ультразвуковых датчиков движения для обнаружения посторонних предметов. Устройство работает на основе сканирования окружающего пространства волнами ультразвукового диапазона колебаний (20-60 кГц). Когда в зоне контроля ультразвукового датчика движения появляется движущийся предмет, то частота отраженной от этого предмета волны изменяется из-за эффекта Доплера. Приемник датчика регистрирует изменение частоты и преобразует это изменение в электрический сигнал. Этот сигнал передается на контрольную аппаратуру дежурного по станции как аварийный сигнал.
Недостатком этого устройства является небольшая дальность действия ультразвуковых датчиков (до 10 м) и невозможность оперативного оповещения машиниста скоростного поезда.
Известна система удаленного контроля и информирования машиниста о занятости железнодорожного переезда, содержащая установленные на переезде видеокамеры, первое устройство приема-передачи радиосигнала, связанное с устройством формирования сигнала тревоги и видеокадра, и размещенное на локомотиве второе устройство приема-передачи радиосигнала, подключенное к управляющему контроллеру, видеомонитору, запоминающему устройству и тревожным сигнализаторам, система снабжена средством определения занятости переезда, предназначенным для формирования сигнала о наличии объекта на переезде в случае соответствия этого объекта заранее заданным параметрам по форме и размеру, подключенным к видеокамерам и первому устройству приема-передачи радиосигнала, а управляющий контроллер подключен к средству, осуществляющему расчет кривых торможения, и выполнен с возможностью формирования сигнала запроса информации о наличии объекта на переезде при приближении на заданное время хода к точке начала полного служебного или экстренного торможения перед ближайшим переездом, при этом средство определения занятости переезда выполнено с возможностью формирования сигнала о наличии объекта на переезде при получении указанного запроса (RU 2667035, B61L 29/00, 13.09.2018).
Недостатком данной системы является невозможность достоверного функционирования в различных погодных условиях, а также в связи с установкой на переездах не реализуется функция оповещения людей, так как для этой задачи используются существующие средства автоблокировки.
В качестве прототипа принят стационарный комплекс обнаружения препятствий в области ограниченной видимости, содержащий видеокамеры и основной вычислительный блок, дополнительный вычислительный блок, радар, навигационный приемник и извещатель, причем каждый вычислительный блок состоит из процессора с подключенными к нему модулем синхронизации и модулем обнаружения препятствий, соединенным с модулем обработки данных радара и с модулем обработки данных видеокамер, при этом основной вычислительный блок содержит процессор, модуль поездной ситуации, модуль оповещения, модуль сравнения, устройство шифрации и дешифрации, соединенное с радиомодемом, модуль сравнения, который подключен к процессору дополнительного вычислительного блока, модули синхронизации основного и дополнительного вычислительных блоков соединены с навигационным приемником, а с выходом модуля оповещения соединен извещатель (RU 2711480, B61L 23/00, 17.01.2020).
Недостатком данного комплекса является необходимость ручной калибровки системы, невысокая достоверность данных о препятствиях в плохих погодных условиях, реагирование алгоритма только на человека и отсутствие оповещения диспетчера, который осуществляет контроль за поездной ситуацией в зонах повышенной опасности, а также применение средств связи с низкой пропускной способностью (типа GSM).
Задача, на решение которой направлено изобретение заключается в создании системы, позволяющей обнаруживать объекты-препятствия в области движения скоростного электропоезда (в его габаритах и ближайших к путям зонах), выполнять оповещение людей, крупных животных и владельцев автомобилей и других транспортных средств, попадающих в опасную зону, передавать данные через высокоскоростные средства связи (LTE, 5G) и осуществлять оповещение, помимо машиниста скоростного поезда, машиниста-оператора центра дистанционного контроля и управления о наличии препятствий в зоне ограниченной видимости для скоростного поезда с применением специальных датчиков (лидаров, тепловизоров), способных работать в плохих погодных условиях, что повысит точность определения объектов-препятствий и снизит вероятность ложных срабатываний и принятия неверных управляющих решений как при автоматизированном управлении, так и в полностью автоматическом (GoA4).
Технический результат заключается в повышении достоверности и дальности определения объектов-препятствий в зоне ограниченной видимости при движении скоростного электропоезда, в том числе в автоматическом режиме управления (GoA4), а также передачи информации о наличии объектов в этой зоне и своевременного оповещения машиниста, машиниста-оператора, людей и животных, находящихся в опасной для них зоне.
Технический результат достигается тем, что инфраструктурная система технического зрения обеспечения безопасности движения поездов в области ограниченной видимости, содержащая видеокамеры, вычислитель, с подключенными с нему приемником сигналов спутниковой навигационной системы и извещателем, согласно изобретению снабжена лидаром и тепловизором, а видеокамеры, лидар и тепловизор через соответствующие модули обработки объектов соединены с соответствующими входами вычислителя, в состав которого дополнительно введен модуль обнаружения и идентификации объектов, с подключенным к нему модулем искусственной нейронной сети, при этом к вычислителю подключены дополнительно введенные модуль автоматической калибровки, модуль диагностики и модуль связи и передачи данных, который по скоростной линии связи соединен с модулями связи и передачи данных соответственно бортовой системы оповещения и центра дистанционного контроля и управления, в состав которого входят последовательно соединенные модуль связи и передачи данных, вычислитель, модуль управления и монитор машиниста – оператора, бортовая система оповещения состоит из вычислителя, который подключен к блоку микропроцессорной системы управления и диагностики поезда и соединен с модулем связи и передачи данных и с монитором машиниста.
Техническое решение с вышеперечисленной совокупностью признаков обеспечивает достижение технического результата за счет использования датчиков, работающих в плохих погодных условиях, такие как лидар и тепловизор, с помощью которых возможно определение точных параметров объектов (координаты, скорость и размеры), находящихся в контролируемой зоне, извещателя, обеспечивающего оповещение о приближении скоростного поезда людей, крупных животных и водителей транспортных средств, а также передачу данных в центр дистанционного контроля и управления посредством высокоскоростных средств связи по защищенным каналам с одновременной синхронизацией всех данных, а также обработкой и сравнением полученных результатов от бортовой системы технического зрения и инфраструктурной системы технического зрения для принятия наилучшего управляющего решения для безопасного движения скоростного электропоезда.
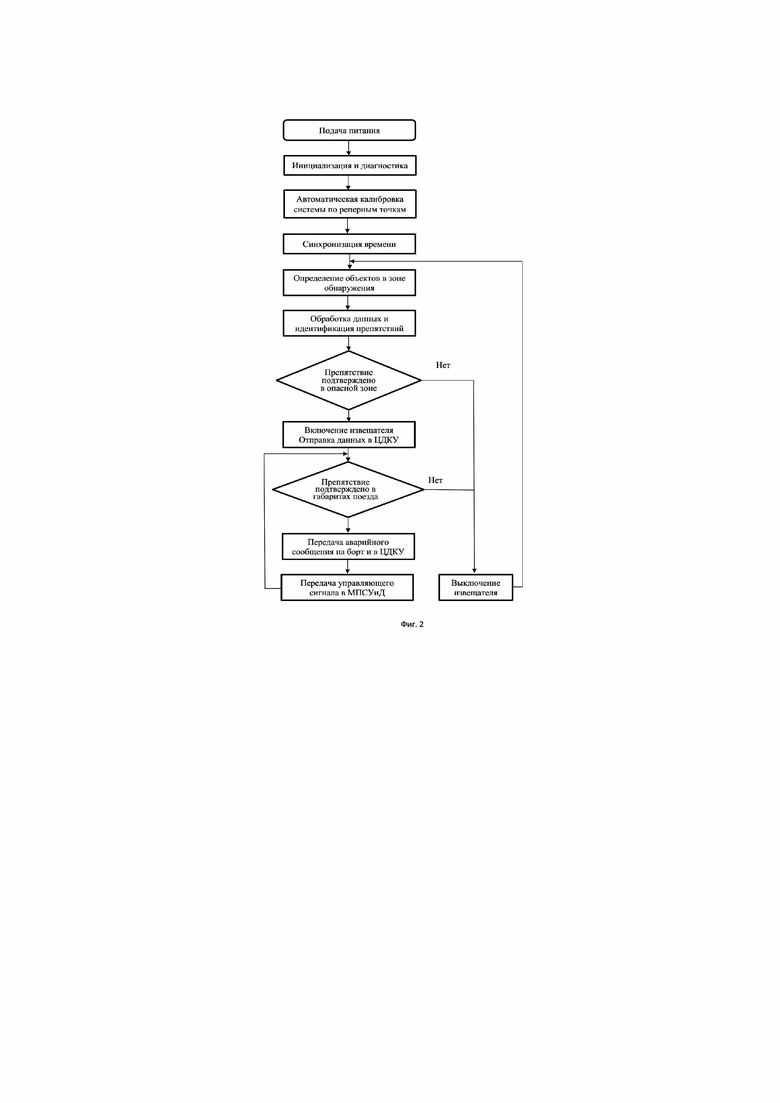
На фиг.1 представлена блок-схема инфраструктурной системы технического зрения обеспечения безопасности движения поездов в области ограниченной видимости. На фиг. 2 приведен алгоритм работы инфраструктурной системы технического зрения.
Инфраструктурная система технического зрения обеспечения безопасности движения поездов в области ограниченной видимости содержит видеокамеры 1, лидар 2 и тепловизор 3, которые через соответствующие модули 4, 5 и 6 обработки объектов соединены с соответствующими входами вычислителя 7, в состав которого дополнительно введен модуль 8 обнаружения и идентификации объектов, с подключенным к нему модулем 9 искусственной нейронной сети, при этом к вычислителю 7 подключены приемник 10 сигналов спутниковой навигационной системы (СНС) (используется для синхронизации данных), извещатель 11, модуль 12 автоматической калибровки, модуль 13 диагностики и модуль 14 связи и передачи данных, который по скоростной линии связи (стандарта LTE, 5G) соединен с модулями 15 и 16 связи и передачи данных соответственно бортовой системы 17 оповещения и центра 18 дистанционного контроля и управления, в состав которого входят последовательно соединенные модуль 16 связи и передачи данных, вычислитель 19, модуль 20 управления и монитор 21 машиниста – оператора, бортовая система 17 оповещения состоит из вычислителя 22, который подключен к блоку 23 микропроцессорной системы управления и диагностики поезда (МПСУиД) и соединен с модулем 15 связи и передачи данных и с монитором 24 машиниста. В состав модуля связи и передачи данных входят (на чертеже не показаны) последовательно соединенные шифратор/дешифратор, модем и антенна (LTE, 5G).
Инфраструктурная система технического зрения обеспечения безопасности движения поездов работает следующим образом.
После включения электропитания на все устройства происходит инициализация, автоматическая калибровка и диагностика модулей и устройств инфраструктурной системы технического зрения, включая видеокамеры 1, лидар 2, тепловизор 3, вычислитель 7, извещатель 11, модуль 14 связи и передачи данных, причем модулем 12 осуществляется автоматическая калибровка системы по реперным точкам (дома, пикетные столбы, рельсы), а все диагностические данные записываются в модуль 13 диагностики, которые в случае неисправности передаются в автоматическом режиме или по запросу с модуля 20 управления центра 18 дистанционного контроля и управления на монитор 21 машиниста-оператора.
Одновременно вычислитель 7 посредством операционной системы и прикладного программного обеспечения взаимодействует с модулем 14 связи и передачи данных, в состав которого входят последовательно соединенные шифратор/дешифратор, модем и антенна (LTE, 5G). Приемник 10 сигналов спутниковой навигационной системы служит для синхронизации всех данных по времени. Точное время поступает от спутниковых навигационных систем GPS и ГЛОНАСС, причем системное время TGPS является всемирным координированным временем (UTC) с высокой точностью, с которым синхронизируется и ГЛОНАСС.
Определение объектов в зоне действия инфраструктурной системы технического зрения (СТЗ) осуществляется посредством сканирования необходимого и установленного пространства датчиками (видеокамеры 1, лидар 2, тепловизор 3) с выхода которых в соответствующих модулях 4, 5 и 6 обработки объектов путем применения вычислительных алгоритмов и методов формируются сенсорные объекты перечисленных датчиков.
Обработка данных и идентификация препятствий осуществляется в вычислителе 7 с помощью входящих в него модуля 8 обнаружения и идентификации объектов и соединенного с ним модуля 9 искусственной нейронной сети (ИНС), посредством алгоритмов комплексирования данных, причем данные сенсорных объектов от видеокамер и тепловизоров первоначально обрабатываются в модуле 9 ИНС, а затем комплексируются с сенсорными данными от лидаров, а задача обработки данных от различных типов датчиков решается с помощью расширенного алгоритма фильтра Калмана. В модуле 8 обнаружения и идентификации объектов происходит идентификация объектов-препятствий в соответствии с классами объектов (BIG, MEDIUM, SMALL) и определением модулем 9 ИНС типов объектов [CAR (электропоезд, локомотив, вагон), MID (авто, крупное животное), PERSON (человек)].
С выхода модуля 14 связи и передачи данных посредством высокоскоростной беспроводной линии связи информация от инфраструктурной СТЗ передается на стационарный центр 18 дистанционного контроля и управления для отображения на мониторе 21 машиниста-оператора. Оперативная информация об объектах в зоне действия системы и диагностическая информация о состоянии модулей и узлов инфраструктурной СТЗ после предварительной обработки (декодирования) в модуле 16 связи и передачи данных поступает на вход вычислителя 19 для их обработки и через модуль 20 управления данные выводятся на мониторе 21 машиниста-оператора. Запрос информации о состоянии модулей и узлов инфраструктурной СТЗ осуществляется в обратном порядке путем формирования команды с модуля 20 управления.
В случае подтверждения наличия препятствия типа MID (авто, животное), PERSON (человек) в опасной зоне (определенной при настройке датчиков инфраструктурной СТЗ (условная опасная «желтая» зона – ±3,0 метра относительно пути следования) выдается команда на включение извещателя 11, представляющее собой устройство звуковой (динамик) и световой (строб-вспышка) сигнализации, а также передача служебного сообщения и видеоизображения на монитор 21 машиниста-оператора через цепочку устройств, а именно модуль 14 связи и передачи данных посредством беспроводной линии связи (стандарта LTE, 5G), модуль 16 связи и передачи данных центра 18 дистанционного контроля и управления, вычислитель 19, модуль 20 управления.
В случае подтверждения наличия препятствия типа MID (авто, животное), PERSON (человек) в габаритах поезда (определенной при настройке датчиков инфраструктурной СТЗ (условная «красная» зона – ±1,7 метра относительно пути следования) помимо включения извещателя 11, осуществляется передача аварийного сообщения в бортовую систему оповещения локомотива (электропоезда) на монитор 24 машиниста и в центр 18 дистанционного контроля и управления на монитор 21 машиниста-оператора. Причем сигнал в бортовую систему оповещения проходит цепочку устройств, включающих модуль 14 связи и передачи данных посредством беспроводной линии связи (стандарта LTE, 5G), модуль 15 связи и передачи данных, вычислитель 22, с одновременной передачей управляющего воздействия на блок 23 микропроцессорной системы управления и диагностики поезда для осуществления аварийного или служебного торможения. Также управляющее воздействие на блок 23 бортовой системы может передать машинист-оператор центра 18 дистанционного контроля и управления с модуля 20 управления по схеме, описанной выше.
В случае отсутствия или выхода из опасной зоны препятствия с вычислителя 7 подается команда на выключение извещателя 11, и система переходит в дежурный режим с постоянным сканированием пространства опасной зоны. По команде с модуля 20 управления центра 18 дистанционного контроля и управления машинист-оператор может запросить диагностическую и оперативную информацию с узлов и датчиков инфраструктурной СТЗ, для контроля и определения информационной ситуации в зоне проезда локомотива (электропоезда).
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ МОНИТОРИНГА СОСТОЯНИЯ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ ПРИ ДВИЖЕНИИ ПОЕЗДА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2022 |
|
RU2829561C2 |
| Бортовая информационная система | 2020 |
|
RU2742960C1 |
| Стационарный комплекс обнаружения препятствий в области ограниченной видимости | 2019 |
|
RU2711480C1 |
| СПОСОБ ОБЕСПЕЧЕНИЯ БЕЗОПАСНОСТИ ПРИ ДВИЖЕНИИ ПОЕЗДА МЕТРОПОЛИТЕНА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ С ПРИМЕНЕНИЕМ БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2022 |
|
RU2829794C2 |
| СИСТЕМА УДАЛЕННОГО КОНТРОЛЯ И ИНФОРМИРОВАНИЯ МАШИНИСТА О ЗАНЯТОСТИ ЖЕЛЕЗНОДОРОЖНОГО ПЕРЕЕЗДА | 2017 |
|
RU2667035C1 |
| Система управления движением поездов в режиме виртуальной сцепки | 2024 |
|
RU2828911C1 |
| МНОГОУРОВНЕВАЯ РАСПРЕДЕЛЕННАЯ ИНФОРМАЦИОННАЯ СИСТЕМА ДЛЯ СОСТАВНОГО ТРАНСПОРТА | 2011 |
|
RU2479454C1 |
| Бортовая система технического зрения рельсового транспортного средства | 2023 |
|
RU2804565C1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО КОНТРОЛЯ СВОБОДНОСТИ ЗОНЫ ПЕРЕЕЗДА | 2020 |
|
RU2751041C1 |
| КОМПЛЕКС ОХРАНЫ МЕСТНОСТИ С ПРИМЕНЕНИЕМ БЕСПИЛОТНОГО ВОЗДУШНОГО СРЕДСТВА | 2024 |
|
RU2834502C1 |

Изобретение относится к средствам обеспечения безопасности на железнодорожном транспорте. Инфраструктурная система технического зрения обеспечения безопасности движения поездов в области ограниченной видимости содержит видеокамеры, лидар и тепловизор, которые через соответствующие модули обработки объектов соединены с соответствующими входами вычислителя, который содержит модуль обнаружения и идентификации объектов, с подключенным к нему модулем искусственной нейронной сети. При этом к вычислителю подключены приемник сигналов спутниковой навигационной системы, извещатель, модуль автоматической калибровки, модуль диагностики и модуль связи и передачи данных, который по высокоскоростной линии связи соединен с бортовой системой оповещения и центром дистанционного контроля и управления. Центр дистанционного контроля и управления содержит последовательно соединенные модуль связи и передачи данных, вычислитель, модуль управления и монитор машиниста-оператора. Бортовая система оповещения состоит из вычислителя, который подключен к блоку микропроцессорной системы управления и диагностики поезда, модуля связи и передачи данных и монитора машиниста. Технический результат заключается в повышении достоверности определения объектов-препятствий в области движении скоростного электропоезда. 2 ил.
Инфраструктурная система технического зрения обеспечения безопасности движения поездов в области ограниченной видимости, содержащая видеокамеры, вычислитель с подключенными с нему приемником сигналов спутниковой навигационной системы и извещателем, отличающаяся тем, что она снабжена лидаром и тепловизором, а видеокамеры, лидар и тепловизор через соответствующие модули обработки объектов соединены с соответствующими входами вычислителя, в состав которого дополнительно введен модуль обнаружения и идентификации объектов с подключенным к нему модулем искусственной нейронной сети, при этом к вычислителю подключены дополнительно введенные модуль автоматической калибровки, модуль диагностики и модуль связи и передачи данных, который по высокоскоростной линии связи соединен с модулями связи и передачи данных соответственно бортовой системы оповещения и центра дистанционного контроля и управления, в состав которого входят последовательно соединенные модуль связи и передачи данных, вычислитель, модуль управления и монитор машиниста-оператора, а бортовая система оповещения состоит из вычислителя, который подключен к блоку микропроцессорной системы управления и диагностики поезда и соединен с модулем связи и передачи данных и с монитором машиниста.
| Стационарный комплекс обнаружения препятствий в области ограниченной видимости | 2019 |
|
RU2711480C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ЗАЩИТЫ МАШИНИСТА | 2018 |
|
RU2736243C1 |
| WO 2020012475 A1, 16.01.2020 | |||
| WO 9731810 A1, 04.09.1997. | |||

