Настоящее изобретение относится к системе обратимого преобразования возвратно-поступательного движения во вращательное движение, а точнее - к системе обратимого преобразования возвратно-поступательного движения во вращательное движение, включающей в себя спиральный двигатель.
УРОВЕНЬ ТЕХНИКИ
Двигатель внутреннего сгорания известен из документа US 7942115, в котором описана система преобразования прямолинейного возвратно-поступательного движения во вращательное движение. Данная система содержит узел цилиндров внутреннего сгорания, каждый из которых имеет шток, который толкает ползун по поверхности ротора. Поперечное сечение ротора выполнено со спиральным профилем и так, чтобы движения ползуна повторяли форму поверхности с выполнением при этом этапов сжатия и расширения. Данное известное из уровня техники решение показало себя удовлетворительным, хоть оно и имеет недостаток, заключающийся в том, что толкающее усилие поршня обусловлено исключительно давлением отработанного газа. Данное решение уменьшает проблемы загрязнения окружающей среды, но не решает их, так что оно недостаточно эффективно.
Следовательно, существует потребность в улучшении работы цилиндра внутреннего сгорания и системы с ротором спирального профиля для решения вышеупомянутых проблем загрязнения окружающей среды, а также для повышения эффективности и, соответственно, снижения потребления топлива.
Задачей настоящего изобретения является решение указанных выше проблем и недостатков уровня техники путем создания новой системы энергоснабжения для преобразования прямолинейного возвратно-поступательного движения во вращательное движение.
РАСКРЫТИЕ СУЩНОСТИ ИЗОБРЕТЕНИЯ
Таким образом, в изобретении предложена система обратимого преобразования возвратно-поступательного движения во вращательное движение, содержащая один или более приводных цилиндров и ротор спирального сечения, причем каждый приводной цилиндр из множества приводных цилиндров содержит установленные внутри первый и второй гидроцилиндры, выполненные с возможностью независимого скольжения относительно друг друга, причем каждый гидроцилиндр соединен с соответствующей пружиной, при этом система выполнена так, что для того, чтобы она обеспечивала вращение ротора, каждый приводной цилиндр использует отдельно первую пружину первого гидроцилиндра, а затем вторую пружину второго гидроцилиндра для приведения в действие трубчатого штока, соединенного с указанными первым и вторым гидроцилиндрами, причем указанный трубчатый шток непрерывно контактирует на своем противоположном конце с профилем поверхности указанного спирального ротора и вызывает его вращение.
Согласно настоящему изобретению система для приведения в действие ротора спирального профиля содержит одно или более приводных устройств, каждое из которых содержит конструкцию с двумя независимыми гидроцилиндрами, каждый из которых имеет пружину, трубчатый шток и ведомый элемент, снабженный колесом или подобным элементом. Каждая пружина действует на соответствующий подвижный элемент и скользит в гидроцилиндре, в который она помещена. Первый скользящий элемент гидроцилиндра функционально связан с первой пружиной. Второй скользящий элемент гидроцилиндра функционально связан со второй пружиной. Первая пружина перемещает первый скользящий элемент в соответствии с несинхронным движением относительно второго скользящего элемента. Трубчатый шток выборочно и поочередно соединяется с первым скользящим элементом и вторым скользящим элементом. Трубчатый шток передает толкающее усилие пружины на конец колеса ползуна. Конец колеса ведомого элемента приводится в движение и скользит наружу из цилиндра вследствие растяжения первой пружины, и в то же время гидравлическое устройство, внешнее по отношению к цилиндру, создает гидравлическое давление текучей среды, которое передается на соответствующие гидроцилиндры, вызывая сжатие второй пружины.
Конструкция выполнена так, чтобы при каждом полном обороте ротора указанные первая и вторая пружины меняют фазу их растяжения, первая пружина завершает растяжение при полном обороте ротора, а вторая пружина во время этого же оборота полностью сжимается под действием гидравлического давления.
В настоящем силовом устройстве используется сила пружины в качестве основной силы для выполнения полезной работы.
Таким образом, согласно изобретению предлагается система обратимого преобразования возвратно-поступательного движения во вращательное движение согласно прилагаемым пунктам формулы изобретения.
Изобретение имеет несколько предпочтительных вариантов осуществления, которые проиллюстрированы ниже.
Согласно одному из предпочтительных неограничивающих вариантов осуществления, в системе использованы две пружины разных размеров, но имеющие по существу равные толкающие усилия. Каждая пружина воздействует на соответствующий скользящий элемент и соответствующий гидроцилиндр для толкания трубчатого штока, который действует через конец колеса ведомого элемента.
В качестве неограничивающего примера, ползун может представлять собой колесо или, в качестве альтернативы, поверхность скольжения с низким коэффициентом трения (направляющий рельс). Колесо ползуна всегда контактирует с поверхностью спиралевидного профиля ротора, с передачей, таким образом, силы от устройства к поверхности ротора и преобразованием ее в крутящий момент.
Следует отметить, что в данном случае в системе согласно изобретению могут использоваться любые силовые устройства, известные как устройства для преобразования/передачи, такие как пружины, гидросистемы, пневмосистемы, электромагнитные системы и их комбинации, с целью создания силы, необходимой для сжатия пружин или создания крутящего момента на валу ротора.
В качестве неограничивающего примера, система содержит неподвижные и подвижные части. Первые из них включают в себя корпус каждого цилиндра, опорную плиту и пары гидроцилиндров. С другой стороны, подвижные части включают в себя две пружины, трубчатый толкающий шток, вращающийся или скользящий ведомый элемент, смонтированный на конце штока, и два скользящих элемента, выполненных с возможностью скольжения относительно друг друга и относительно соответствующих гидроцилиндров, причем данные скользящие элементы помещены в указанный корпус цилиндра.
Кроме того, предусмотрены вспомогательные части, находящиеся снаружи описанной выше системы, такие как, например, один или более гидравлических насосов и соответствующий гидравлический регулятор/распределитель текучей среды и резервуар насоса/насосов. Данные части системы будут подробно описаны ниже.
Согласно изобретению предпочтительно множество упомянутых выше устройств могут воздействовать на отдельный элемент ротора. Ротор может иметь поверхность контакта с некруглым профилем.
Благодаря особой конфигурации спирального ротора толкающее усилие каждого устройства передается на поверхность ротора, вызывая его вращение на полный оборот в ходе цикла растяжения одной из пружин.
Главным признаком данной системы является ее способность использовать цикл растяжения одной из пружин для выполнения полезной работы, то есть вращения ротора, в то время как вторая пружина постепенно сжимается, и все это достигается за один оборот ротора. Таким образом, согласно изобретению используется уникальная система для переключения действий между пружинами: в то время как одна из них растягивается, другая сжимается. Данные функции выполняются одновременно, другими словами, при растяжении пружины она же создает движущую силу для ротора, придавая ему силу вращения, и одновременно с этим вторая пружина (которая была растянута в предыдущий период вращения) совершает фазу сжатия. Сжатие одной из двух пружин происходит за счет действия гидросистемы (или любой другой аналогичной системы известного типа), и таким образом, что сжатая пружина будет полностью готова к передаче силы ротору для выполнения следующего оборота вала данного ротора. Данный цикл переключения между пружинами повторяется каждый оборот ротора.
Настоящее изобретение позволяет получить новые технические решения с важными улучшениями по сравнению с ближайшим аналогом из известного уровня техники, раскрытым в US 7942115, где описано применение ротора с полярным спиральным профилем в сочетании с тепловым блоком внутреннего сгорания (цилиндр-поршень).
Предпочтительно и согласно первому аспекту изобретения в случае использования спирального ротора в сочетании с цилиндрами внутреннего сгорания (цилиндр-поршень) предусмотрена поверхность спирального ротора с круглым сечением (или постоянным диаметром) с целью удержания поршня в верхней мертвой точке (так называемая «задержка поршня») и на стадии горения, с получением, таким образом, полного сгорания при постоянном объеме. Та же конфигурация остановки поршня достигается и в нижней мертвой точке, а также во время всей фазы опорожнения/промывки/заполнения цилиндра.
Согласно другому предпочтительному аспекту изобретения поверхность профиля ротора можно создать различными способами. Для этого, в соответствии с известным из уровня техники документом US 7942115, поверхность контакта с ползуном всегда представляет собой плоскую поверхность, на которую создаваемое ползуном усилие действует в перпендикулярном направлении. Согласно настоящему изобретению плоскость контакта ползуна/ведомого элемента наклонена, причем таким образом, чтобы можно было задать разные углы наклона ползуна/ведомого элемента, благодаря чему удается добиться большей эффективности и, следовательно, получить множество возможных конструктивных конфигураций.
Согласно следующему предпочтительному аспекту изобретения длину выдвижения цилиндра должен выбирать конструктор с учетом проектных требований.
Согласно другому предпочтительному аспекту изобретения можно предусмотреть различные варианты осуществления системы, при этом каждый из них имеет определенное расположение приводных устройств относительно поверхности ротора. Более конкретно, путем изменения угла наклона приводных устройств относительно нормального направления поверхности ротора можно увеличивать или уменьшать величину силы, прикладываемой приводными устройствами на спиральный профиль и тем самым увеличивать или уменьшать величину крутящего момента ротора, с сохранением при этом фаз цикла неизменными.
Согласно другому предпочтительному аспекту изобретения можно регулировать наклон приводного устройства (приводных устройств) и, соответственно, направление прикладываемой к ротору силы, с обеспечением благодаря этому возможности изменения хода исполнительного элемента во время полного оборота ротора.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
Ниже приводится детальное описание некоторых предпочтительных вариантов осуществления системы обратимого преобразования возвратно-поступательного движения во вращательное движение, данное в виде неограничивающих примеров и со ссылками на приложенные чертежи, на которых:
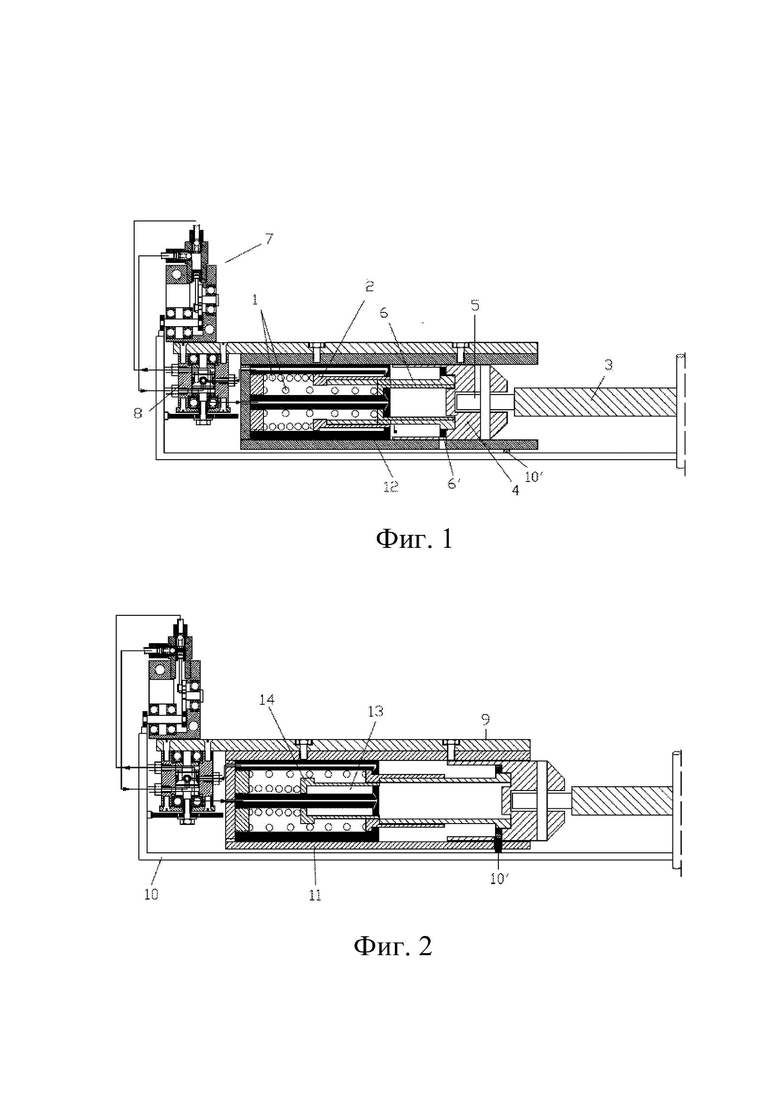
на фиг. 1 показан схематичный вид в поперечном разрезе первого варианта осуществления приводного цилиндра согласно изобретению, где показан его первый рабочий режим;
на фиг. 2 показан схематичный вид в поперечном разрезе цилиндра с фиг. 1 в его втором рабочем режиме;
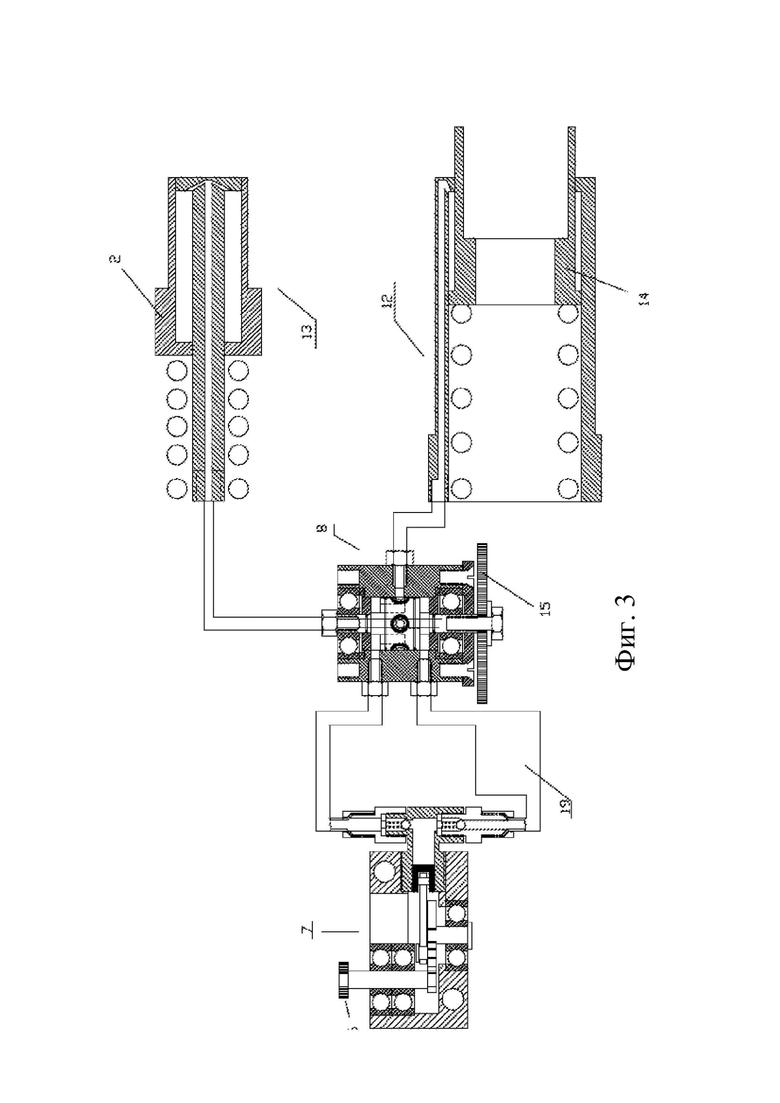
на фиг. 3 показан схематичный вид в разрезе, частично и детально иллюстрирующий некоторые компоненты системы гидравлического питания приводного устройства с фиг. 1 и 2 согласно изобретению;
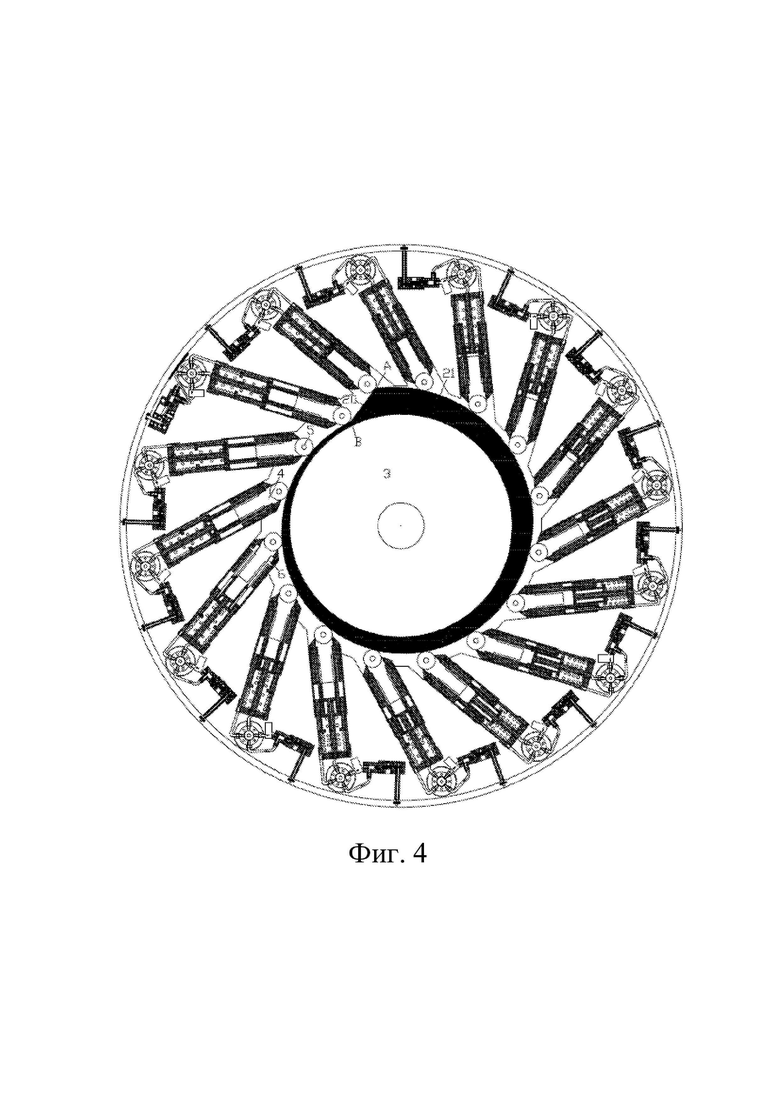
на фиг. 4 показан схематичный вид в поперечном разрезе, иллюстрирующий систему, состоящую из множества приводных устройств с фиг. 1-3 и связанную с ротором, имеющим спиральный профиль согласно изобретению;
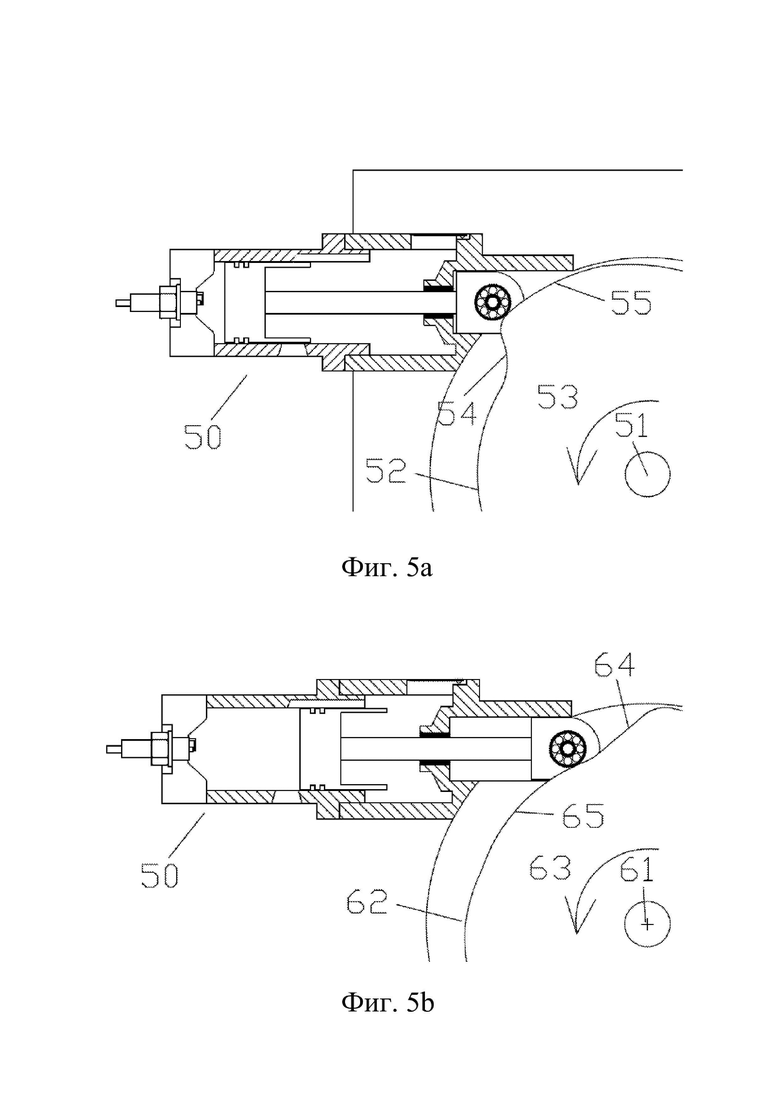
на фиг. 5А и 5В показаны схематичные виды в поперечном разрезе двух рабочих режимов системы согласно второму варианту осуществления изобретения, в которой предусмотрены цилиндры внутреннего сгорания в качестве приводных устройств, связанных с ротором спирального профиля;
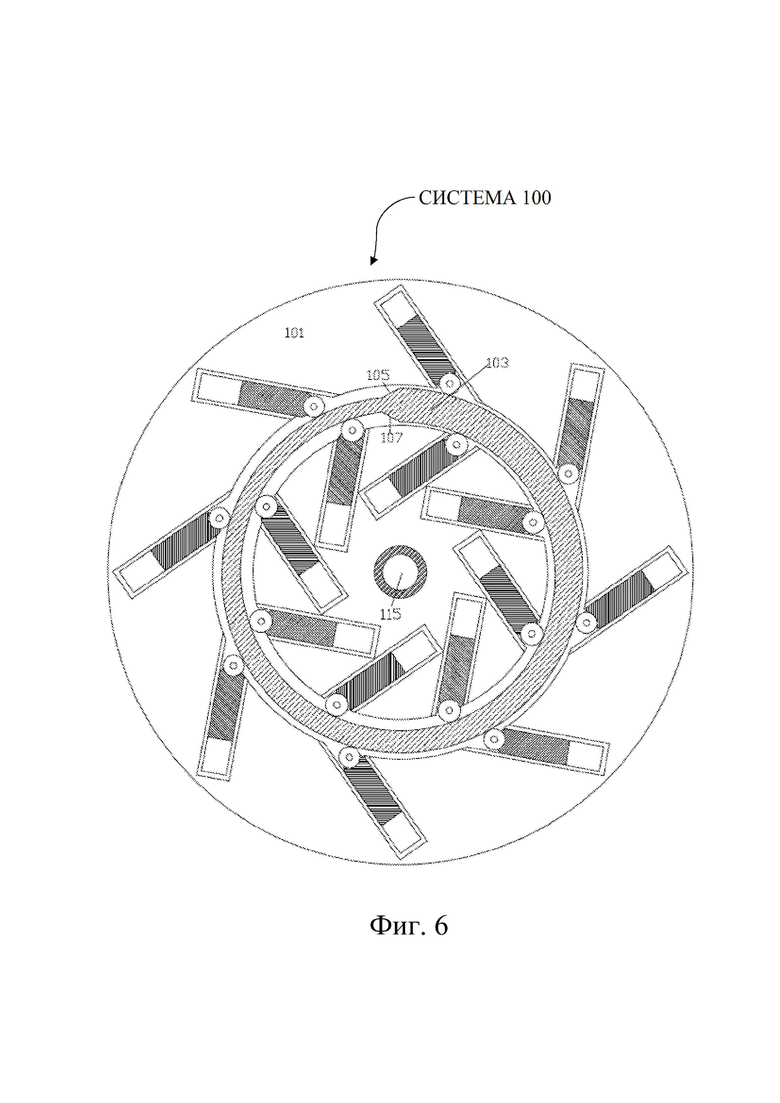
на фиг. 6 показан схематичный вид третьего варианта осуществления системы согласно изобретению, в которой приводные устройства воздействуют как на наружный, так и на внутренний профили спирального ротора;
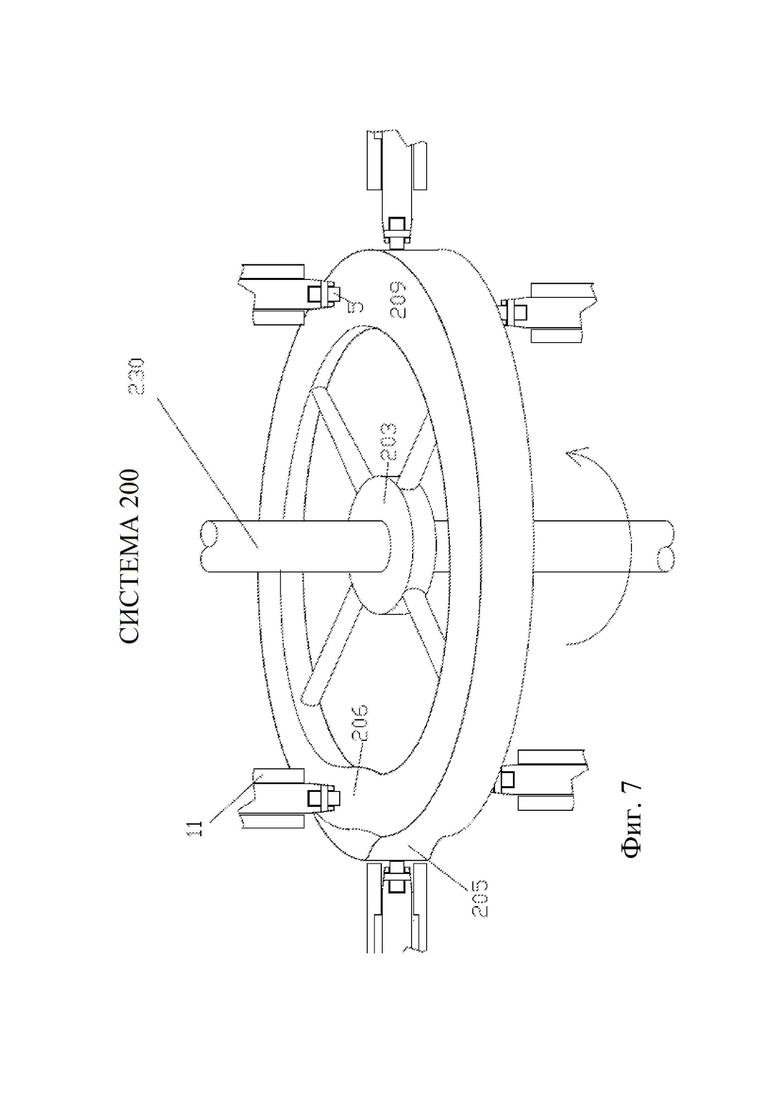
на фиг. 7 показан схематичный вид четвертого варианта осуществления системы согласно изобретению, в которой предусмотрены несколько приводных устройств, причем данные приводные устройства воздействуют на непланарные плоскости, имеющиеся на различных профилях одного и того же спирального ротора;
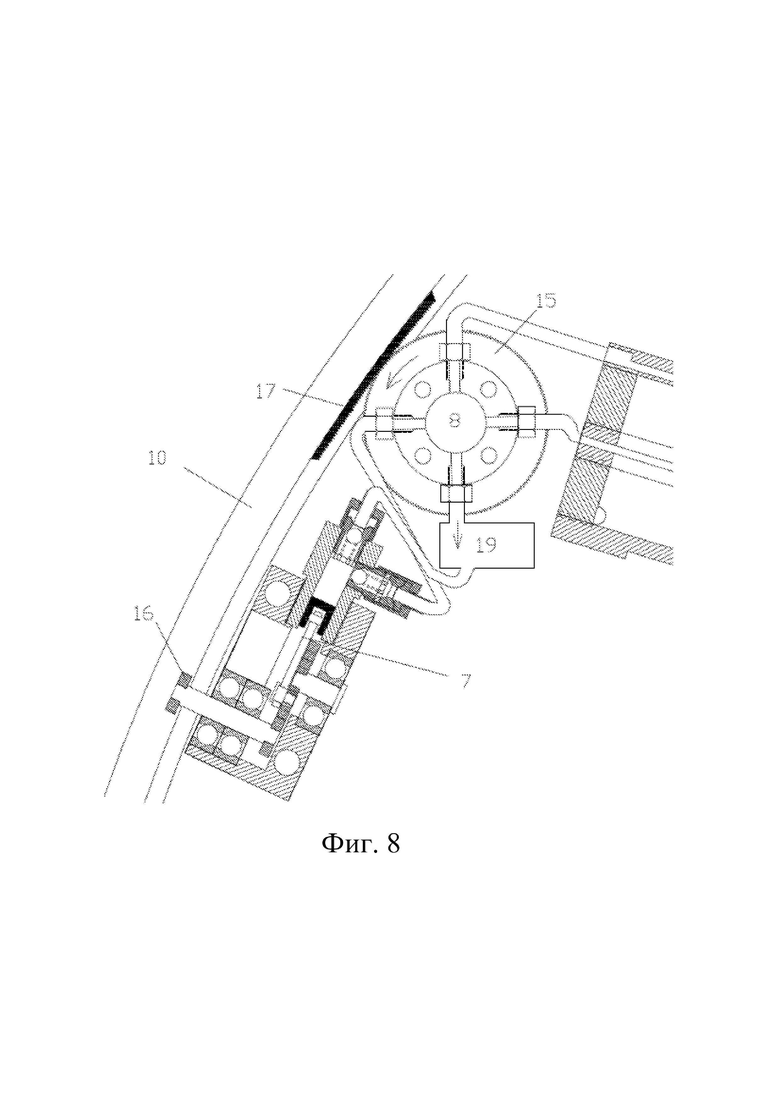
на фиг. 8 показан увеличенный схематичный вид части зубчатого механизма для управления сжатием пружины согласно первому варианту осуществления изобретения;
на фиг. 9 показан схематичный вид, частично иллюстрирующий систему согласно пятому варианту осуществления;
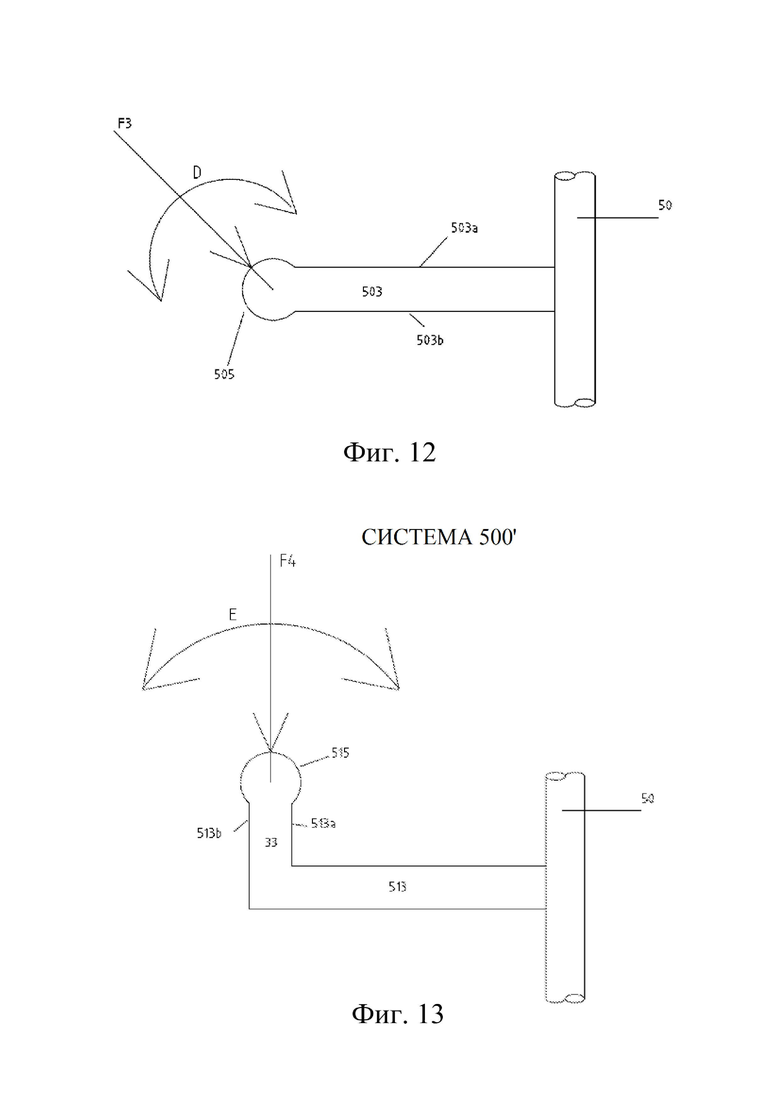
на фиг. 10-13 показаны схематичные диаграммы, иллюстрирующие составляющие сил, прикладываемых к ротору согласно различным вариантам осуществления изобретения;
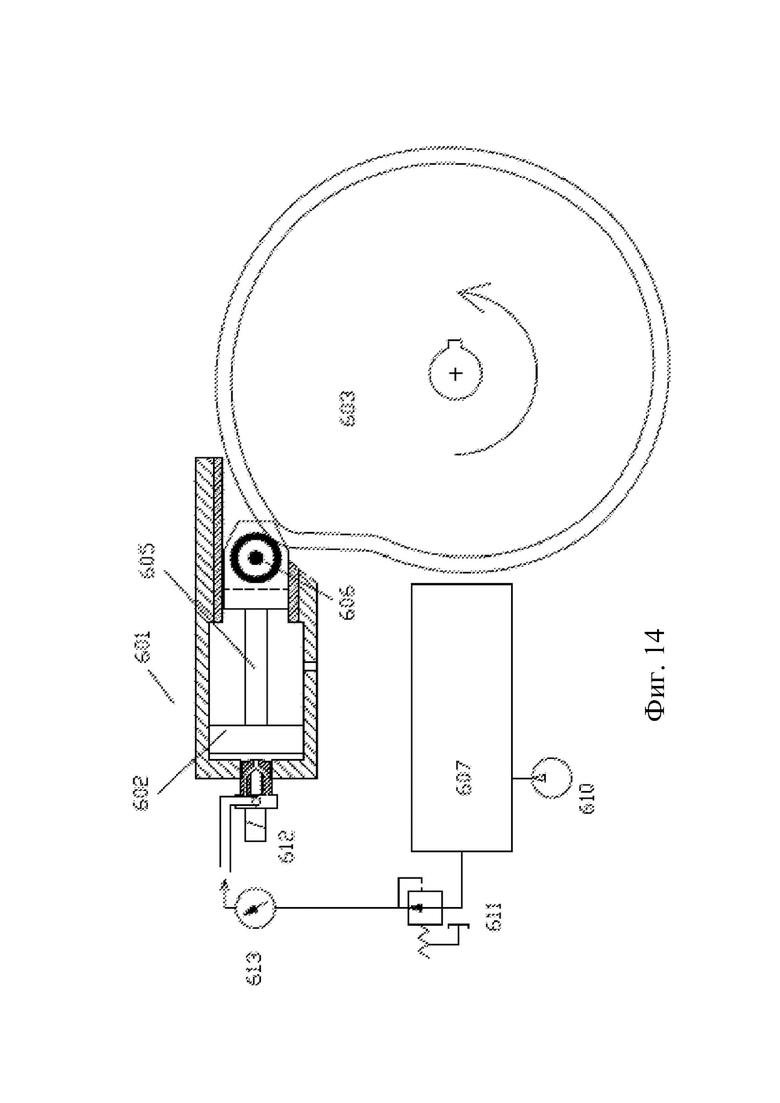
на фиг. 14 показан схематичный вид системы, содержащей устройство с приводом сжатого воздуха для управления работой спирального ротора;
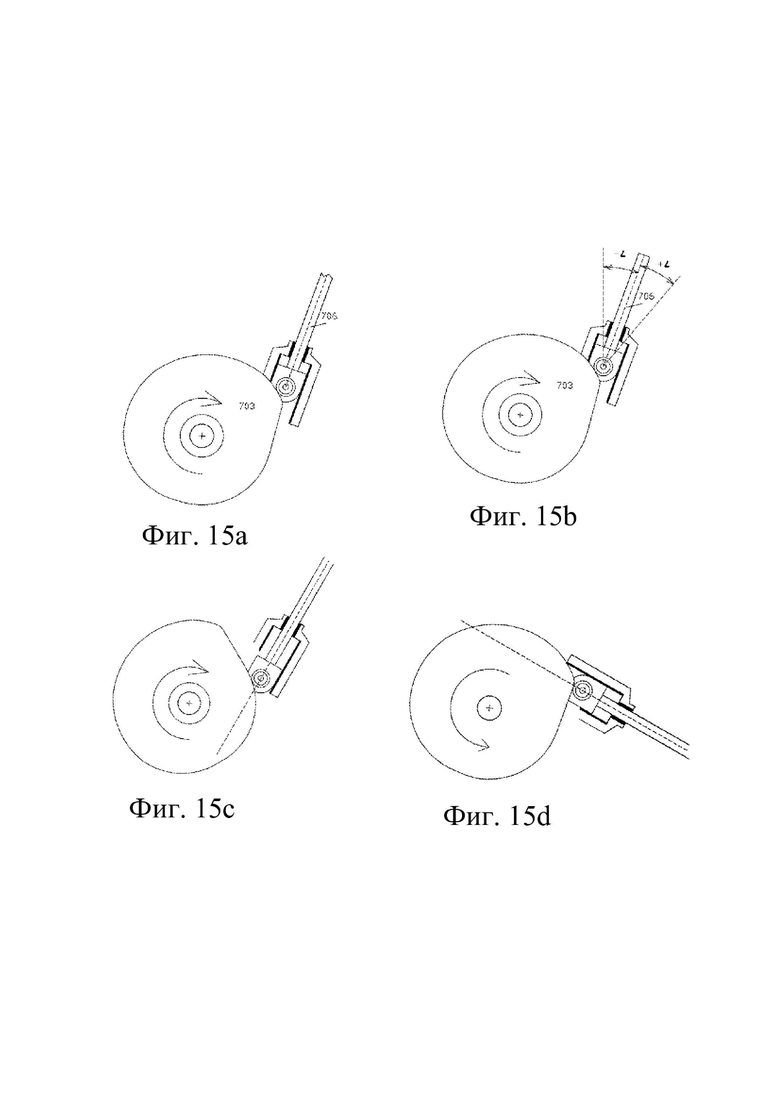
на фиг. 15А, 15В, 15С и 15D показаны виды, схематично иллюстрирующие взаимодействие между поверхностью ротора и приводным устройством при изменении наклона приводного устройства относительно нормальной ориентации поверхности ротора;
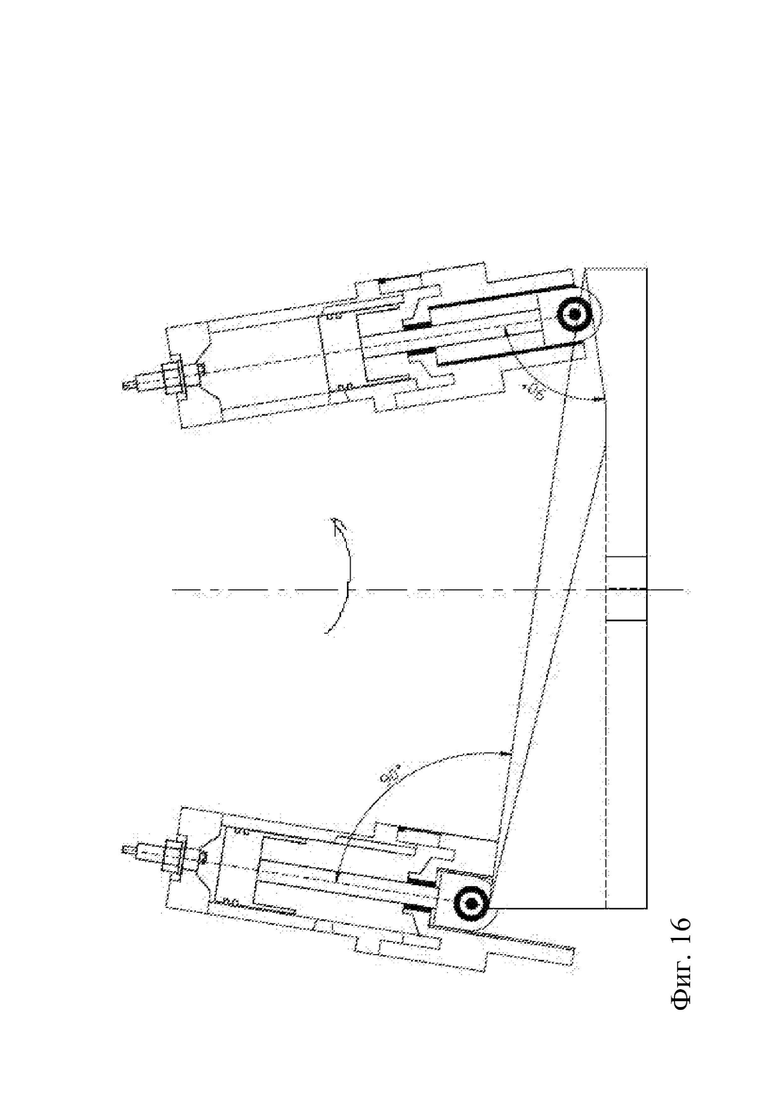
на фиг. 16 показан схематичный вид еще одного варианта осуществления системы согласно изобретению;
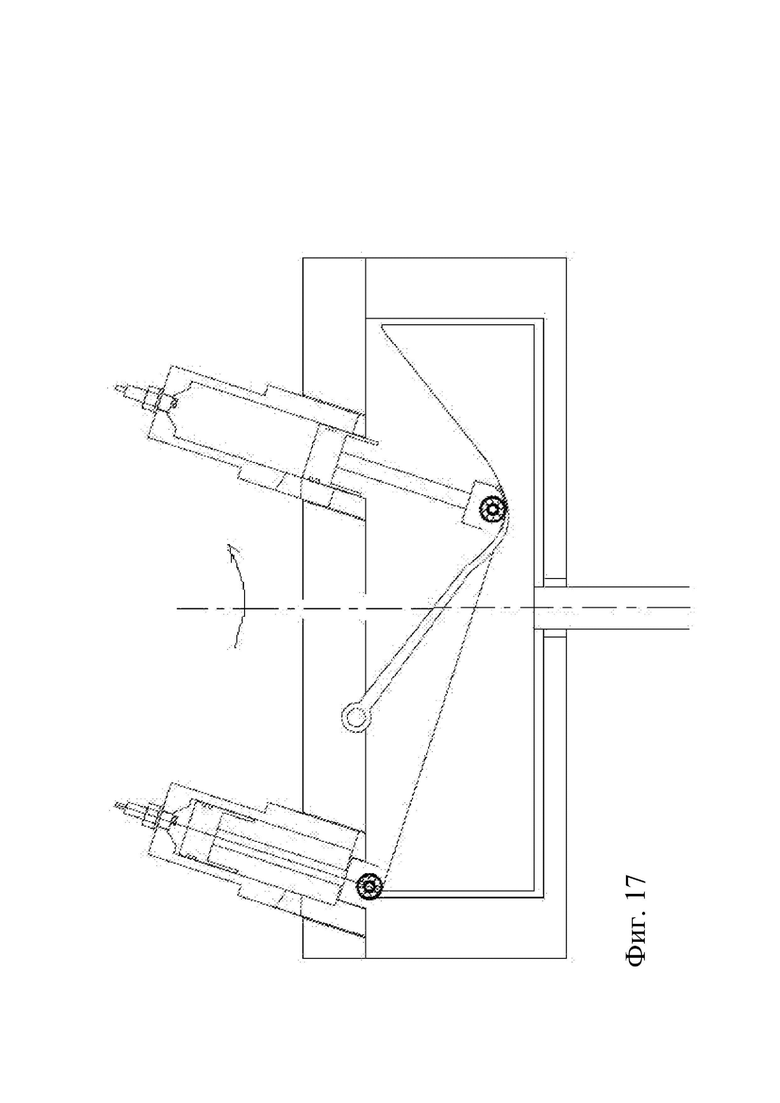
на фиг. 17 показан схематичный вид еще одного варианта осуществления системы согласно изобретению.
При рассмотрении фиг. 1-4 становится очевидно, что система использует силу пружин в качестве основной силы для выполнения работы.
В системе использована пара пружин разного размера, но с одинаковым толкающим усилием, которые помещены в один корпус цилиндра. Каждая пружина воздействует на подвижный элемент, находящийся в соответствующем гидроцилиндре и связанный с трубчатым штоком, который передает толкающее усилие на его конец, соединенный с роликовым ползуном (подшипником). На данный роликовый ползун оказывается воздействие для поддержания непрерывного контакта с поверхностью профиля спирального ротора с созданием крутящего момента, действующего на ось ротора, и приведения последнего во вращение. Гидроцилиндры имеют разные размеры, но одинаковую объемную производительность.
Также предусмотрена внешняя система питания энергией, воздействующая на соответствующие пружины для их сжатия во время каждого цикла. В качестве неограничивающих примеров внешних систем можно назвать: пневмосистему, гидросистему и электромагнитную систему.
Как показано на фиг. 1 и 2, силовое/приводное устройство содержит: зубчатый диск 10, соединенный с валом 3 ротора, корпус 11 цилиндра и опорную плиту 9. Также предусмотрен роликовый ползун 5 (ролик или иной элемент с низким коэффициентом трения на поверхности), смонтированный с возможностью вращения на головке 4, причем головка 4 смонтирована с возможностью скольжения на трубчатом штоке 6, а последний смонтирован, тоже с возможностью скольжения, в корпусе 11 цилиндра. Подвижный элемент 2 образует внутреннюю часть наружного гидроцилиндра 12, тогда как наружная часть приводного цилиндра неподвижна. Подвижный элемент 14 образует наружную часть внутреннего гидроцилиндра 13, тогда как внутренняя часть цилиндра неподвижна.
Оба подвижных элемента 2 и 14 гидроцилиндров 12 и 13 связаны на одной стороне с трубчатым штоком 6, а на другой стороне - с соответствующими пружинами 1. Трубчатый толкающий шток 4 на одном из своих концов постоянно находится в контакте с поддерживающей головкой 4, а на другом конце выборочно зацепляется с подвижными элементами 2 и 14 цилиндров.
Как можно видеть на фиг. 2, трубчатым толкающим штоком 6 удерживается зубчатое кольцо 6'. Часть зубчатого кольца 6' обращена наружу корпуса 11 цилиндра через отверстие, выполненное в данном корпусе 11. Данное отверстие совпадает с зубчатым участком 10' только тогда, когда диск 10, вращаясь, подводит зубчатый участок 10' к отверстию на корпусе цилиндра и обеспечивает соединение между зубчатым участком 10' и зубчатым кольцом 6' штока 6. Зацепление зубчатого участка 10' с кольцом 6' вызывает поворот штока 6 на 90 градусов в его седле. Вращение штока 6 вокруг своей оси необходимо для выборочного установления соединения штока 6 с подвижными элементами гидроцилиндров 2 и 14, причем конструкция такова, что при каждом повороте ротора шток 6 совершает вращение вокруг своей оси и меняет зацепление с первым подвижным элементом 2 на зацепление со вторым подвижным элементом 14.
Кроме того, предусмотрено, что вращение штока 6 завершается до начала втягивания штока 6 внутрь цилиндра 11 и с заменой зацепления с первым подвижным элементом 2, пружина которого находится в состоянии растяжения, на зацепление со вторым подвижным элементом 14, пружина которого сжата. Следует отметить, что длина зубчатого участка 10' такова, чтобы он зацеплялся с зубчатым кольцом 6' во время поворота последнего на 90 градусов.
Как показано на фиг. 3, гидравлический насос 7 содержит обратные клапаны и соединен с гидравлическим распределителем 8 текучей среды через соответствующие гидравлические порты впуска и выпуска текучей среды. Распределитель 8 также соединен с гидроцилиндрами 12 и 13 через гидравлические порты впуска и выпуска текучей среды. Насос 7 работает с использованием зубчатой передачи 16, установленной на оси насоса 7, который находится в постоянном контакте в зубчатым диском 10. Гидроцилиндры 12 и 13 имеют каналы для прохождения текучей среды, соединенные с распределителем 8.
Как показано на фиг. 3, гидравлический распределитель/регулятор 8 содержит зубчатую передачу 15, управляющую его работой. При вращении зубчатой передачи 15 он выборочно открывает и закрывает соответствующие порты, для питания, с одной стороны, цилиндров 12 и 13 гидравлической текучей средой, и для возвращения указанной текучей среды из цилиндров в бак 19 с другой стороны.
Как показано на фиг. 8, предусмотрен зубчатый участок 17, проходящий вдоль внутренней поверхности диска 10 и выполненный с возможностью зацепления с зубчатой передачей 15 распределителя текучей среды. При соединении с зубчатым участком 17 зубчатая передача 15 поворачивается на 90 градусов. Диск 10 соединен с ротором 3. Следует отметить, что если предусмотрено несколько силовых устройств, соответствующий зубчатый участок 17 будет относиться к каждому из них для управления работой соответствующего гидравлического распределителя 8.
Зубчатый участок 17 может быть выполнен за одно целое с диском 10 или соединен с ним. Диск 10 поворачивается вместе с ротором 3, который воздействует на распределители 8 гидравлической текучей среды силовых устройств, в то время как эти силовые устройства и вспомогательные узлы неподвижны. Зубчатый участок 17 имеет такую длину, чтобы он зацеплялся с регулирующей зубчатой передачей 8, что обеспечивает поворот последней на 90 градусов.
Как можно видеть на фиг. 1 и 2, первый подвижный элемент 3 перемещается при его смещении соответствующей пружиной, переходя из первого положения внутри наружного цилиндра 12 во второе положение, когда он проходит за цилиндр 12, с зацеплением при этом с трубчатым валом 6 и толканием ротора 3 через головку 4 держателя ползуна и ползун 5, вызывая вращение первого из них.
Трубчатый шток 6 имеет вырез для обеспечения возможности скольжения обоих подвижных элементов 2 и 14 гидроцилиндров 12 и 13 без соединения друг с другом. Контакт между трубчатым штоком 6 и элементами 2 и 14 устанавливается таким образом, что трубчатый шток 6 опирается на основания подвижных элементов.
Как видно на фиг. 1 и 2, шток 6 проталкивается до соприкосновения с элементом 2, пружина 1 которого находится в положении сжатия, в то время как элемент 14 после окончания его хода под давлением соответствующей пружины оказывается в неподвижном положении. В этот момент регулятор 8 текучей среды изменяет направление потока за счет давления от насоса 7, и затем текучая среда под давлением поступает в цилиндр 13 путем воздействия на подвижный элемент 14. Данный элемент 14 перемещается под действием давления текучей среды, сжимая при этом соответствующую пружину, тогда как элемент 2 перемещается под действием толкающего усилия растягивающейся пружины, а затем толкает трубчатый шток 6 и соответствующий связанный с ним ползун 5 по поверхности ротора 3, что приводит к вращению последнего.
В процессе описанного выше смещения подвижных элементов 2 и 14 текучая среда вытесняется гидроцилиндрами 12 и 13 в направлении бака 19 на каждом активном ходе элементов 12 и 14, создаваемом пружинами 1.
Как показано на фиг. 4, ротор 3 имеет криволинейный спиральный профиль. Согласно данному предпочтительному неограничивающему варианту осуществления спиральный ротор 3 имеет криволинейный участок, проходящий от точки «А» к точке «В» профиля ротора 3, который, согласно данному варианту осуществления, эквивалентен участку величиной от примерно 20 до примерно 360 градусов поверхности ротора 3. В качестве альтернативы и согласно требованиям эксплуатации, криволинейный участок от точки «А» до точки «В» может проходить на разные длины поверхности ротора 3. Некриволинейная часть (другими словами, наклонная плоскость) проходит по оставшейся части окружности ротора от точки «А» к точке «В».
Согласно варианту осуществления с фиг. 4, в одном из неограничивающих вариантов осуществления одно или более приводных устройств может воздействовать на спиральный ротор 3 с приведением его во вращение в направлении стрелки А. Ползуны 5 сохраняют контакт с профилем ротора 3 так, что каждое соответствующее приводное устройство воздействует на ротор 3.
Следует отметить, что каждое отдельное приводное устройство может вращать ротор 3. Благодаря спиральной форме ротора 3 сила каждого устройства передается на ротор 3 и преобразуется в крутящий момент, вызывая при этом его полный оборот на каждой активной фазе работы приводного устройства.
В конце хода трубчатого штока 6 последний оказывается в положении максимального выдвижения из корпуса 11 цилиндра, которое совпадает с полным оборотом ротора 3 с помощью ползуна 5. В этом положении шток 6 не встречает никакого сопротивления и поворачивается вокруг своей оси на 90 градусов, с отсоединением при этом от подвижного элемента 2 или 14, с которым он был связан до этого. В данном состоянии шток 6 становится готовым к зацеплению с другим подвижным элементом, который до этого сжимал соответствующую пружину под действием давления гидравлической текучей среды.
Перемещению в сторону возврата и контакту с элементом 2 или 14 ничто не мешает.
Возврат штока 6 осуществляется с помощью ротора 3, вращение которого воздействует на наклонную поверхность 20 возврата на ползуне 5, толкая тем самым группу, включающую в себя ползун 5, головку 4 и трубчатый вал 6, в направлении внутренней части корпуса 11 цилиндра.
Как видно на фиг. 4, ротор 3 имеет криволинейную спиральную поверхность 21 и расположен внутри блока, вмещающего силовые устройства. Криволинейный профиль ротора находится в постоянном контакте с ползуном 5. Ротор 3 имеет некриволинейный участок или наклонную плоскость 20, действующую в качестве наклонной поверхности возврата ползуна 5 в корпус 11 цилиндра.
При вращении ротора 3 под действием толкающего усилия каждого из приводных устройств в направлении стрелки (на чертеже против часовой стрелки) по меньшей мере одно из приводных устройств зацепляется с участком наклонной поверхности 20. Ротор 3 воздействует путем толкания головки 4 и трубчатого штока 6 в направлении внутренней части корпуса 11 цилиндра через ползун 5. Возврат штока 6 и головки 4 не встречает никакого сопротивления, и шток 6 приходит в контакт с подвижным элементом гидроцилиндра для повторения цикла вращения. В каждом цикле сжатая пружина растягивается, и ползун 5 смещается с передачей крутящего момента на ротор 3 вдоль криволинейного участка 21. Данное взаимодействие возникает в каждом приводном устройстве, действующем на ротор 3.
На фиг. 1-3 проиллюстрирована работа приводного устройства. Пружина 1 сжимается и приходит в контакт с первым подвижным элементом 2. Подвижный элемент 2 скользит внутри корпуса 1 цилиндра, гарантируя тем самым сохранение ползуном 5 непрерывного контакта с ротором 3. Элемент 2 зацепляется со штоком 6, который через головку 4 и ползун 5 передает толкающее усилие на ротор 3 на криволинейной поверхности 21 (см. фиг. 1).
Как показано на фиг. 8, зубчатая передача 15 при приведении в действие приводит распределитель 8 текучей среды во вращение на угол 90 градусов. При каждом приведении его в действие зубчатой передачей 15 распределитель 8 меняет направление потока гидравлической текучей среды, подаваемой насосом 7, с одного из гидроцилиндров 12, 13 на другой.
В процессе перекачки текучей среды под давлением в соответствующий гидроцилиндр, в результате чего происходит сжатие соответствующей пружины, одновременно с этим текучая среда вытесняется из другого цилиндра вследствие перемещения подвижного элемента, который сдвигается под давлением соответствующей пружины. Подвижный элемент под давлением пружины выполняет полезную работу, а именно вращение ротора, в то время как второй подвижный элемент находится в фазе сжатия пружины под давлением текучей среды.
Согласно данному варианту осуществления, текучая среда, жидкость или газ перекачиваются через распределитель 8 по специальным каналам, соединенным с гидроцилиндрами 12 и 13. Благодаря этому создается давление гидравлической текучей среды внутри гидроцилиндра. Поскольку подвижный элемент – это единственная подвижная часть цилиндра, он перемещается под давлением текучей среды, осуществляя сжатие соответствующей пружины.
Как упомянуто выше, активная фаза, обеспечивающая вращение ротора, происходит во время растяжения пружины. Когда ротор 3 совершает полный оборот, пружина растягивается, и толкающее усилие в направлении ротора 3 заканчивается. На стадии растяжения пружины гидравлическая текучая среда, находящаяся в цилиндре, вытесняется из него в направлении масляного бака. Поток от насоса и к насосу происходит через обратные клапаны.
Следует отметить, что в различных вариантах осуществления системы согласно изобретению гидравлическая текучая среда может быть любой текучей средой, как жидкой, так и газообразной. Кроме того, пружины могут быть изготовлены из различного материала и заменяться другими эквивалентами, они могут сжиматься с использованием любой жидкой или газообразной текучей среды или с использованием электромагнитных катушек, а также можно применять любую известную систему, пригодную для этой цели.
На фиг. 6 проиллюстрирован альтернативный вариант осуществления, в котором предусмотрена ротационная система, состоящая из различных приводных устройств. Основное отличие заключается в использовании кольцевого ротора, имеющего как внутренний, так и наружный профили. Система 100 содержит плиту 101 кольцевой формы с закрепляемыми на ней устройствами. Также предусмотрен ротор 103, расположенный в центре плиты 101. Данный ротор 3 образует первый криволинейный наружный спиральный профиль с наклонной поверхностью 105 возврата, которая соединяет концы криволинейного профиля. Ротор 203 также содержит второй спиральный криволинейный профиль, соединенный внутри с наклонной поверхностью 107 возврата. В результате на обеих поверхностях ротора 3 одновременно действуют несколько приводных устройств.
Следует заметить, что каждое приводное устройство данной системы имеет конструкцию, аналогичную той, что изображена на фиг. 1.
Как наружная, так и внутренняя группа устройств расположены компланарно с ротором 103. Каждое приводное устройство располагается в плите 101.
Силы соответствующих устройств складываются вместе. Таким образом, больше энергии может быть подано к ротору такого же размера, что и варианте осуществления с фиг. 1-4.
Количество устройств, которые могут быть собраны на роторе, зависит от его диаметра и конструктивного решения. Чем больше групп устройств установлено на внутреннем и наружном профилях ротора 103, тем больше энергии будет передано ротору. Согласно данному варианту осуществления, приводные устройства функционируют на роторе 103 так, как было описано выше со ссылкой на фиг. 1-5. Кроме того, в центре ротора 103 предусмотрен приводной вал 115. Данный приводной вал 115 соединен с ротором 103 так, чтобы он мог вращаться вместе с ним.
На фиг. 7 показан еще один вариант осуществления системы со спиральным ротором согласно изобретению.
В данной конфигурации система 200 включает в себя множество устройств, некоторые из которых расположены не в той же горизонтальной плоскости, что ротор 203. Система 200 содержит вал 230, соединенный с ротором 203.
Ротор 203 имеет криволинейные профили как на горизонтальных (радиальных) поверхностях, так и на наружной (тангенциальной) поверхности, причем каждая из них имеет наклонную поверхность 205 и, соответственно, 206 возврата.
Более конкретно, первая наклонная поверхность 205 расположена на наружной поверхности ротора 203. Данный ротор 203 имеет криволинейный спиральный профиль. В обеих плоскостях, горизонтальной и вертикальной, размещены одно или более приводных устройств, для воздействия на ротор 203, как было указано выше. Каждое приводное устройство имеет конструкцию, идентичную той, что описана в отношение фиг. 1.
Некоторые приводные устройства расположены перпендикулярно к поверхности ротора 203. Эффективная сила устройств, расположенных перпендикулярно, обеспечивает вращение ротора 203 в том же направлении (обозначено стрелкой), что и для усилий, созданных группами устройств, находящихся в других положениях на горизонтальной плоскости, в которой находится ротор, и таким образом, данные усилия складываются с усилиями, прикладываемыми к ротору другими устройствами, смонтированными в иных конфигурациях.
Кроме того, согласно еще одному альтернативному варианту осуществления, три разные поверхности ротора 203 могут быть одновременно зацеплены. Реальные силы, приложенные всеми группами приводных устройств, комбинируются друг с другом для обеспечения вращения ротора.
На фиг. 9 показан еще один вариант осуществления изобретения, согласно которому предусмотрена система 300, содержащая приводное устройство, в котором используется единственная пружина для создания силы, необходимой для толкания толкающего штока 306 для вращения ротора 3 с криволинейным профилем. Данный ротор 3 расположен в плите цилиндра. Наружный профиль 21 ротора зацеплен с роликовым ползуном (5). Здесь ротор 3 также имеет криволинейный участок, действующий в качестве наклонной поверхности 20 возврата.
Приводное устройство содержит одну пружину. В блоке 311 цилиндра расположен толкающий шток 306. Пружина расположена в блоке цилиндра между основанием блока и толкающим штоком 306. Толкающий шток 306 удерживает ползун 5 на конце, противоположном тому, который находится в контакте с пружиной. Также предусмотрена электромагнитная катушка 320 для сжатия пружины при ее работе в определенный момент вращения ротора 3. Данная катушка 320 расположена в блоке 311 цилиндра. Ротор 3 воздействует на выключатель (не показан) для генерации тока, питающего магнитную катушку 320, создающую электромагнитную силу для сжатия пружины. Данный выключатель прерывает электрический ток, когда наклонная поверхность 20 возврата проталкивает шток 306 внутрь блока цилиндра, что происходит без сопротивления, поскольку пружина сжата под действием магнитной силы катушки, на которую подан ток. Так как катушка прерывает электрический ток, пружина ослабляется и толкает толкающий шток 306 наружу из блока 311 цилиндра. Указанная сила передается через ползун 5 на ротор 3, вызывая его вращение, как было описано выше. Ротор 3 прерывает питание электромагнитной катушки 320 с помощью выключателя. Выключатель может управляться специальным микропроцессорным электронным блоком управления или путем механического управления с учетом положения, занятого ротором 3 в процессе вращения.
На фиг. 5А и 5В показан еще один вариант осуществления системы согласно изобретению, согласно которому используются один или более приводных элементов 50 типа элементов с эндотермическим внутренним сгоранием. Ротор 53 с фиг. 5А включает в себя участок 55 профиля с постоянным диаметром для удержания поршня в остановленном положении в верхней мертвой точке для фазы горения, благодаря чему гарантируется полное сгорание при постоянном объеме. Длина участка с постоянным диаметром зависит от конструктивных требований, которые могут меняться в зависимости от различных видов используемого топлива и требуемых значений термодинамических параметров. Расширение цилиндра осуществляется на участке 52 спирального профиля ротора 53, с которым соединен ведущий вал 51. Сжатие в цилиндре происходит на участке профиля ротора, таком как наклонная поверхность 54 возврата, после чего происходит сгорание с постоянным объемом в течение всего времени остановки поршня, после чего следуют расширение и повторение цикла.
Таким образом, обеспечена возможность одновременного взаимодействия, на одном и том же роторе, групп цилиндров внутреннего сгорания, питаемых различным топливом и расположенных на различных профилях ротора, в соответствии с конфигурацией с фиг. 7.
На фиг. 5В показано положение, в котором поршень удерживается в остановленном положении в нижней мертвой точке в течение всей фазы опорожнения/промывки/заполнения цилиндра. В этом случае ротор 63 соединен с ведущим валом 61. Данный ротор 63 содержит участок 65 профиля с постоянным диаметром, проходящий от положения открытия выпускного клапана, до положения фазы первоначального сжатия. Сжатие осуществляется посредством наклонной поверхности 64, тогда как расширение имеет место на участке 62 спирального профиля ротора 63. В результате гарантируется полный выпуск отработанных газов.
Благодаря описанной выше конфигурации становится возможной более эффективная промывка цилиндра 50 путем вытеснения остающихся в цилиндре отработанных газов и его полного заполнения свежим воздухом, когда поршень не перемещается, и таким образом, не происходит прерывания описанного выше цикла, в отличие от того, что происходит в существующих двигателях внутреннего сгорания.
Для одного и того же ротора можно использовать оба варианта остановки поршня - и в верхней, и в нижней мертвых точках. В результате существенно улучшаются характеристики и термодинамические параметры циклов, и их эффективность повышается.
В каждом из вариантов осуществления наружная поверхность криволинейного профиля ротора находится в контакте с ползуном 5 в компланарном или ортогональном направлениях. Другими словами, ползун 5 передает силу на ротор под углом 0((компланарно) или 90((ортогонально) к плоскости ротора.
Согласно последующим вариантам осуществления, сила, прикладываемая к ротору, передается через ползун 5 под другим углом к плоскости ротора.
Как показано на фиг. 10, система 400 включает в себя ротор 403 спирального профиля, причем данный ротор 403 соединен с валом 50. Наружная поверхность ротора 403 имеет наружную поверхность 405, наклоненную под предварительно заданным углом (который может изменяться от 1 до 89 градусов) к плоскости, в которой лежит ротор 403.
В системе 400 группа приводных устройств воздействует на ротор 403 в зоне наклонной поверхности (устройства на чертеже не показаны). Группа устройств работает под наклоном 45 градусов относительно ротора 403, прикладывая к ротору 403 более значительную суммарную силу. Результирующая сила обозначена стрелкой F1. При изменении угла наклона поверхности 405 ротора 403 прикладываемая к ротору 403 суммарная сила будет изменяться в результате этого изменения, так как передаваемое усилие является векторной функцией направления.
Угол наклона может изменяться от 1 до 89 градусов относительно плоскости ротора 403, поэтому относительную ориентацию всей группы приводных устройств можно менять в любом положении в пределах от примерно 1 до 179 градусов относительно плоскости ротора 403 или от -89 до +89 градусов относительно нормального направления поверхности 405, как показано двойной стрелкой G.
В данной системе 400 приводные устройства могут взаимодействовать в направлении на наклонной поверхности 405 или в противоположном зеркальном направлении на поверхности 405(ротора 403, как обозначено пунктирной линией на фиг. 10.
На фиг. 11 показана система 400', которая аналогична предыдущей системе, и в которой профиль 33 проходит от плоскости ротора 413, как описано выше. В данном варианте осуществления контактная поверхность 435 профиля 33 ротора 413 наклонена относительно плоскости ориентации профиля 33. В этом случае угол наклона поверхности 435 также может изменяться от 1 до 89 градусов относительно плоскости ротора 413.
В данном варианте осуществления, если группа приводных устройств размещена ортогонально к профилю 33, результирующая сила прикладывается под углом, обозначенным стрелкой F2. В данном случае угол поверхности профиля 33 будет поочередно изменяться от 1 до 89 градусов относительно плоскости, как показано пунктирной линией (435'). Кроме того, группа 400 устройств может быть ориентирована под любым углом вдоль двухсторонней стрелки Н для получения множества различных движущих сил под разными углами, то есть под любым углом, соответствующим величинам от 0 до 180 градусов относительно плоскости ротора 413.
На фиг. 12 показан другой вариант осуществления ротора согласно изобретению. Согласно данному варианту предусмотрена система 500, содержащая ротор 503 спирального профиля, имеющий сферическую поверхность, которая является по существу выпуклой поверхностью 505. В результате можно получить сплошную непрерывную поверхность, позволяющую получить множество различных углов взаимодействия с соответствующими приводными устройствами (на чертеже не показаны), при этом сила может быть приложена в зависимости от положения каждого приводного устройства.
Наружная периферийная поверхность ротора 503 представляет собой скругленную поверхность 505 и проходит по существу на 360 градусов от первой точки 503а поверхности ротора 503 до второй точки 503b поверхности ротора 503. Длина дуги скругленной поверхности 505 зависит от толщины ротора 503.
Группа приводных устройств может быть расположена в положении, нормальном к поверхности, и в любом положении вдоль выпуклой поверхности 505 в направлении, показанном двухсторонней стрелкой D. В качестве примера сила может быть приложена одним приводным устройством вдоль линии, обозначенной стрелкой F3.
Благодаря этому можно прикладывать большую суммарную силу группой приводных устройств (не показаны) путем регулировки относительного угла наклона группы устройств к плоскости, в которой находится ротор 503.
На фиг. 13 показан еще один вариант осуществления изобретения. Согласно данному варианту предусмотрена система 500, содержащая ротор 513, по существу идентичный ротору 503 с фиг. 12, с той разницей, что данный ротор 513 имеет поверхность с профилем 33, причем данная поверхность ориентирована вдоль вертикального направления относительно плоскости ротора 513. Верхняя контактная поверхность профиля 33 имеет наружную поверхность 515 круглой формы. Данная круглая поверхность 515 проходит под углом от 1 до 360 градусов к профилю 33.
Группа приводных устройств (не показаны) может быть ориентирована относительно круглой поверхности профиля ротора в любом положении вдоль поверхности 515 в направлении двухсторонней стрелки Е для любого наклона относительно круглой поверхности 515, с определением тем самым направления силы по стрелке F4.
На фиг. 14 показан еще один вариант осуществления системы согласно изобретению, согласно которому предусмотрена система 600, содержащая ротор 603, по существу идентичный ротору 3 с фиг. 1 и 2, приводное устройство, содержащее пневмоцилиндр 601, который приводится в действие сжатым воздухом, регулятор 611 давления, манометр 613, резервуар 607 сжатого воздуха и электромагнитный клапан 612.
Согласно данному варианту осуществления никакой пружины для приложения силы к ротору 603 не предусмотрено, а в пневмоцилиндре 601 используется давление сжатого воздуха для воздействия на поршень 602. Шток поршня 605 имеет роликовый ползун, который воздействует на поверхность ротора 603, что приводит к вращению последнего.
Сжатый воздух подается в пневмоцилиндр через соленоидный электромагнитный клапан 612, который открывается только в определенный момент, то есть когда поршень 605 цилиндра находится в верхней мертвой точке (состояние, изображенное на чертеже). Открытие клапана 612 регулируется электронным блоком управления или простым устройством через контакт, управляемый вращением ротора 603.
После подачи сжатого воздуха соленоидный клапан 612 закрывается, пока ротор 603 не совершит полный оборот. В нижней мертвой точке поршня 605 воздух выходит в наружное пространство или частично выходит из системы.
На фиг. 15А, 15В, 15С и 15D показано взаимодействие между поверхностью ротора и приводным устройством при изменении наклона последнего относительно нормального направления поверхности ротора и в зависимости от системы согласно изобретению.
Как следует из чертежей, путем изменения наклона приводного устройства 706 относительно поверхности ротора 703 можно получить различные значения сил и, следовательно, крутящего момента, прикладываемого к данному ротору 703.
Более конкретно, как показано на фиг. 15В и 15D, при изменении наклона приводного устройства 706 с (-L) на (+L) соответственно изменяются плечо рычага, воздействующее на ось ротора 703, а также ход приводного устройства и направление вращения ротора 703 (см. фиг. 15D).
Следует отметить, что фазы цикла при этом не меняются, так что фазы расширения и сжатия устройства 706 всегда связаны со спиральным профилем ротора 703.
Согласно данной конфигурации можно существенно увеличить крутящий момент на оси ротора 703 благодаря выбору угла наклона устройства 706. Кроме того, можно также изменять ход устройства 706 пропорционально его наклону относительно поверхности ротора 703. В результате можно добиться большего или меньшего хода с учетом конструктивных требований, но при этом он всегда будет соответствовать полному обороту ротора 703.
На фиг. 16 показан еще один вариант осуществления системы согласно изобретению.
Согласно данному варианту осуществления предусмотрено новое решение взаимодействия между одним или более цилиндров поршней и поверхностью взаимодействия вращающегося ротора вокруг его продольной оси вращения, причем ротор имеет круглое сечение, а его поверхность взаимодействия с указанными одним или более цилиндров-поршней является нормальной к продольной оси ротора и имеет спиральный профиль с соответствующим подъемом.
Следует отметить, что согласно альтернативным вариантам осуществления, ротор может иметь одну или более поверхностей взаимодействия, нормальных и/или параллельных продольной оси вращения.
Согласно данному варианту при выборе размещения цилиндра (цилиндров) предусмотрено, что каждый цилиндр располагается таким образом, что точка контакта штоков каждого цилиндра всегда образует угол 90 градусов с поверхностью взаимодействия ротора, то есть ортогональна к данной поверхности взаимодействия.
Данная конфигурация гарантирует идеальное распределение сил по поверхности ротора, что дает максимальный нужный эффект.
Такая конфигурация пригодна как для цилиндров внутреннего сгорания, так и для пневмо- или гидроцилиндров либо иных аналогичных решений.
Сила, созданная группой цилиндров-поршней, прикладывается в данной конфигурации всегда под прямым углом в течение всей активной фазы цикла, с передачей, таким образом, большего количества энергии с ее минимальными потерями.
На фиг. 17 показан еще один вариант осуществления системы согласно изобретению.
Согласно данному варианту осуществления предусмотрена поверхность взаимодействия одного или более цилиндров-поршней ротора вокруг продольной оси, причем ротор имеет круглое сечение, а его поверхность взаимодействия с указанными одним или более цилиндров-поршней является нормальной к продольной оси ротора и имеет спиральный профиль с соответствующим подъемом.
Следует отметить, что согласно альтернативным вариантам осуществления, ротор может иметь одну или более поверхностей взаимодействия, нормальных и/или параллельных продольной оси вращения ротора.
Кроме того, предусмотрен рычажный механизм, действующий в процессе возврата поршня в верхнюю мертвую точку на стадии сжатия. Другими словами, с учетом того, что участок ротора спирального профиля имеет наклонную плоскость подъема с чрезмерным наклоном и, соответственно, во время хода поршня создаются чрезмерные силы трения, использование такого рычага позволяет избежать таких проблем в процессе работы.
Более конкретно, рычаг связан с блоком двигателя и, следовательно, не вращается вместе с ротором. Данный рычаг имеет вильчатую форму и снабжен соответствующим ползуном или ведомым элементом, который установлен на конце вилки. Наклонная поверхность воздействует на ползун, тогда как конец рычага взаимодействует с ползуном штока поршня. При приближении к наклонной поверхности рычаг поднимается и возвращает поршень в верхнюю мертвую точку.
Как только достигается верхняя мертвая точка поршня, рычаг высвобождается и возвращается в исходное положение. Такое решение, хотя оно и простое, дает огромную выгоду с точки зрения ограничения задействованных сил, создания лишь незначительного сопротивления смещению и минимизации трения.
Подобная конфигурация применима как к цилиндрам внутреннего сгорания, так и к пневмо- либо гидроцилиндрам или иным аналогичным решениям.
Специалистам в данной области очевидно, что в настоящее изобретение могут быть внесены различные дополнительные модификации помимо описанных выше, без изменения при этом сущности изобретения, причем все такие модификации включены в объем правовой охраны, определенный формулой изобретения.


Группа изобретений относится к системе обратимого преобразования возвратно-поступательного движения во вращательное движение. Система содержит одно или более приводных устройств, выполненных с возможностью взаимодействия по меньшей мере с одной поверхностью взаимодействия ротора (3) со спиральным профилем. Каждое приводное устройство из указанного множества приводных устройств содержит гидроцилиндры или цилиндры внутреннего сгорания. Каждое приводное устройство выполнено с возможностью приведения в движение трубчатого штока (6), соединенного с соответствующим цилиндром. Шток (6) связан с ползуном (5). Ползун (5) выполнен с возможностью передачи толкающего усилия штока (6) на указанную по меньшей мере одну поверхность взаимодействия ротора (3) со спиральным профилем с созданием на роторе (3) крутящего момента. Группа изобретений направлена на уменьшение загрязнения окружающей среды и повышения эффективности и, соответственно, снижение потребления топлива. 3 н. и 20 з.п. ф-лы, 21 ил.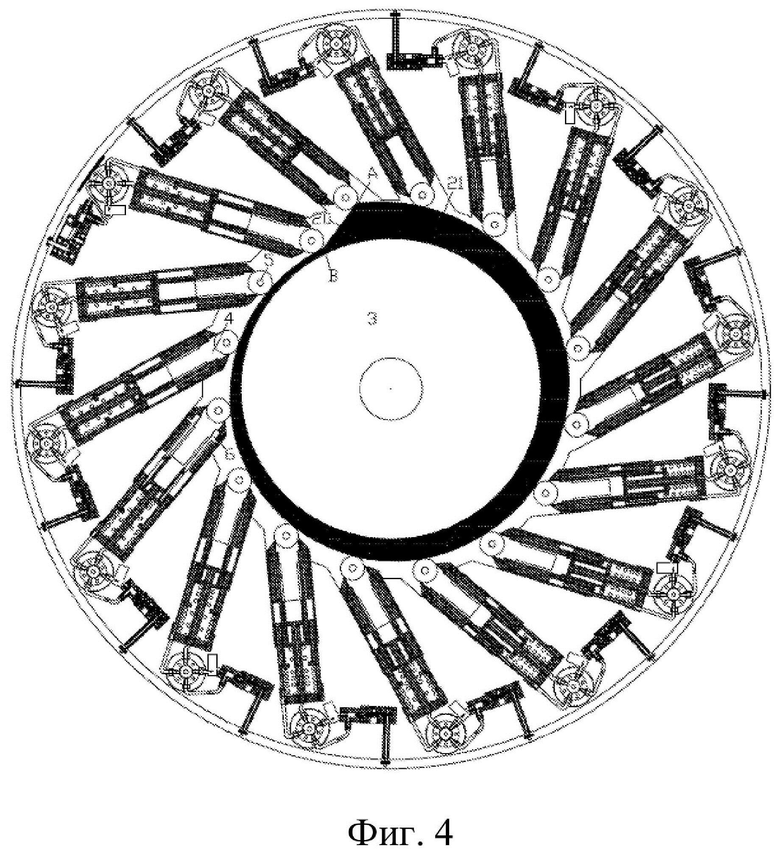
1. Система обратимого преобразования возвратно-поступательного движения во вращательное движение, содержащая одно или более приводных устройств, выполненных с возможностью взаимодействия с ротором, имеющим спиральное сечение и имеющим по меньшей мере одну поверхность взаимодействия с указанными одним или более приводными устройствами,
отличающаяся тем, что каждое приводное устройство из указанного множества приводных устройств содержит установленные внутри первый и второй гидроцилиндры, выполненные с возможностью независимого скольжения относительно друг друга, причем каждый гидроцилиндр соединен с упругими средствами;
при этом каждое приводное устройство выполнено с возможностью раздельного взаимодействия с первыми упругими средствами первого гидроцилиндра и вторыми упругими средствами второго гидроцилиндра для толкания трубчатого штока, соединенного с указанными первым и вторым гидроцилиндрами, причем указанный трубчатый шток связан с головкой, включающей в себя ползун, при этом указанный ползун выполнен с возможностью передачи толкающего усилия указанного трубчатого штока на указанную по меньшей мере одну поверхность взаимодействия ротора спирального профиля и создания на указанном роторе крутящего момента.
2. Система обратимого преобразования возвратно-поступательного движения во вращательное движение по п. 1, отличающаяся тем, что указанные упругие средства представляют собой пружины.
3. Система обратимого преобразования возвратно-поступательного движения во вращательное движение по п. 1, отличающаяся тем, что указанные упругие средства представляют собой газообразную или жидкую текучую среду.
4. Система обратимого преобразования возвратно-поступательного движения во вращательное движение по любому из пп. 1-3, содержащая одно или более приводных устройств, выполненных с возможностью взаимодействия с ротором, имеющим поперечное сечение спиральной формы, причем каждое приводное устройство расположено под наклоном относительно нормального направления указанной по меньшей мере одной поверхности взаимодействия с ротором.
5. Система обратимого преобразования возвратно-поступательного движения во вращательное движение по п. 4, отличающаяся тем, что каждое приводное устройство выполнено так, что при изменении наклона устройства относительно нормального направления указанной по меньшей мере одной поверхности взаимодействия указанного ротора величина толкающего усилия, прикладываемого устройством к указанному ротору, изменяется соответствующим образом и, следовательно, соответствующим образом изменяется величина крутящего момента, воздействующего на ротор.
6. Система обратимого преобразования возвратно-поступательного движения во вращательное движение по п. 4 или 5, отличающаяся тем, что каждое приводное устройство выполнено так, что при изменении наклона устройства относительно нормального направления указанной по меньшей мере одной поверхности взаимодействия указанного ротора также изменяется ход расширения/сжатия каждого приводного устройства относительно полного оборота указанного ротора.
7. Система обратимого преобразования возвратно-поступательного движения во вращательное движение по любому из пп. 1-6, отличающаяся тем, что каждое приводное устройство выполнено так, что при изменении наклона приводного устройства относительно нормального направления указанной по меньшей мере одной поверхности взаимодействия указанного ротора изменяется направление вращения указанного ротора.
8. Система обратимого преобразования возвратно-поступательного движения во вращательное движение по любому из пп. 1-7, отличающаяся тем, что указанный ротор имеет по меньшей мере одну поверхность взаимодействия с указанными одним или более приводными устройствами, которая наклонена относительно продольного направления оси вращения указанного ротора.
9. Система обратимого преобразования возвратно-поступательного движения во вращательное движение по п. 8, отличающаяся тем, что указанная по меньшей мере одна поверхность взаимодействия наклонена относительно продольного направления оси вращения ротора на угол, величина которого составляет от 1 до 89 градусов.
10. Система обратимого преобразования возвратно-поступательного движения во вращательное движение по любому из пп. 4-9, отличающаяся тем, что каждое приводное устройство расположено под наклоном относительно нормального направления указанной по меньшей мере одной поверхности взаимодействия указанного ротора на угол, величина которого составляет от -89 до +89 градусов.
11. Система обратимого преобразования возвратно-поступательного движения во вращательное движение по любому из пп. 1-10, отличающаяся тем, что указанный ротор имеет по меньшей мере одну поверхность взаимодействия для взаимодействия с указанными одним или более приводными устройствами, которая представляет собой выпуклую поверхность.
12. Система обратимого преобразования возвратно-поступательного движения во вращательное движение по п. 11, отличающаяся тем, что каждое приводное устройство расположено нормально относительно указанной выпуклой поверхности.
13. Система обратимого преобразования возвратно-поступательного движения во вращательное движение, содержащая одно или более приводных устройств, выполненных с возможностью взаимодействия с ротором, имеющим спиральное сечение и имеющим по меньшей мере одну поверхность взаимодействия с указанными одним или более приводными устройствами,
причем каждое приводное устройство из указанного множества приводных устройств представляет собой цилиндр внутреннего сгорания и поршневое устройство, при этом каждое приводное устройство связано со штоком, который включает в себя ползун, выполненный с возможностью зацепления с указанной по меньшей мере одной поверхностью указанного ротора,
отличающаяся тем, что указанный ротор имеет по меньшей мере одну поверхность взаимодействия с указанными одним или более приводными устройствами, которая наклонена относительно продольного направления оси вращения указанного ротора.
14. Система обратимого преобразования возвратно-поступательного движения во вращательное движение по п. 13, отличающаяся тем, что указанный ротор спирального поперечного сечения имеет по меньшей мере участок указанной по меньшей мере одной поверхности взаимодействия профиля ротора, имеющий постоянный диаметр, причем система выполнена так, что при зацеплении указанного ползуна с участком постоянного диаметра указанного ротора внутренний объем цилиндра приводного устройства не изменяется.
15. Система обратимого преобразования возвратно-поступательного движения во вращательное движение по п. 13 или 14, содержащая одно или более приводных устройств, выполненных с возможностью взаимодействия с ротором спирального сечения, причем каждое приводное устройство расположено под наклоном относительно нормального направления указанной по меньшей мере одной поверхности взаимодействия с ротором.
16. Система обратимого преобразования возвратно-поступательного движения во вращательное движение по п. 15, отличающаяся тем, что каждое приводное устройство выполнено так, что при изменении наклона устройства относительно нормального направления указанной по меньшей мере одной поверхности взаимодействия указанного ротора изменяется величина толкающего усилия, созданного устройством, к указанному ротору и, следовательно, также изменяется величина крутящего момента, воздействующего на ротор.
17. Система обратимого преобразования возвратно-поступательного движения во вращательное движение по п. 15 или 16, отличающаяся тем, что каждое приводное устройство выполнено так, что при изменении наклона устройства относительно нормального направления указанной по меньшей мере одной поверхности взаимодействия указанного ротора также изменяется фаза расширения/сжатия каждого приводного устройства относительно полного оборота указанного ротора.
18. Система обратимого преобразования возвратно-поступательного движения во вращательное движение по любому из пп. 13-17, отличающаяся тем, что каждое приводное устройство выполнено так, что при изменении наклона устройства относительно нормального направления указанной по меньшей мере одной поверхности взаимодействия указанного ротора изменяется направление вращения указанного ротора.
19. Система обратимого преобразования возвратно-поступательного движения во вращательное движение по п. 13, отличающаяся тем, что указанная по меньшей мере одна поверхность взаимодействия наклонена относительно продольного направления оси вращения ротора на угол, величина которого составляет от 1 до 89 градусов.
20. Система обратимого преобразования возвратно-поступательного движения во вращательное движение по любому из пп. 15-19, отличающаяся тем, что каждое приводное устройство расположено под наклоном относительно нормального направления указанной по меньшей мере одной поверхности взаимодействия указанного ротора на угол, величина которого составляет от -89 до +89 градусов.
21. Система обратимого преобразования возвратно-поступательного движения во вращательное движение по любому из пп. 15-20, отличающаяся тем, что указанный ротор имеет по меньшей мере одну поверхность взаимодействия с указанными одним или более приводными устройствами, которая представляет собой выпуклую поверхность.
22. Система обратимого преобразования возвратно-поступательного движения во вращательное движение по п. 21, отличающаяся тем, что каждое приводное устройство расположено нормально к указанной выпуклой поверхности.
23. Система обратимого преобразования возвратно-поступательного движения во вращательное движение, содержащая одно или более приводных устройств, выполненных с возможностью взаимодействия с ротором в блоке двигателя, имеющим по меньшей мере одну поверхность взаимодействия с указанными по меньшей мере одним или более приводными устройствами и поперечное сечение спирального профиля, содержащее по меньшей мере одну наклонную поверхность,
отличающаяся тем, что каждое приводное устройство из указанного множества приводных устройств представляет собой поршневой цилиндр, включающий в себя шток и ползун, причем предусмотрен рычажный механизм, с помощью которого обеспечена возможность выполнения возвратного хода поршня в верхней мертвой точке в фазе сжатия, при этом указанный рычажный механизм содержит рычаг, соединенный с возможностью качания с блоком двигателя и имеющий форму вилки, причем указанная вилка имеет на своем конце ползун и выполнена с возможностью взаимодействия с указанной поверхностью взаимодействия указанного ротора, при этом указанный конец указанного вильчатого рычага выполнен с возможностью взаимодействия с ползуном штока поршня, причем при приближении штока к указанной наклонной поверхности указанный рычаг поднимает и возвращает поршень в верхнюю мертвую точку, при этом когда ползун достигает верхней мертвой точки поршня, указанный рычаг отцепляется от указанного штока и возвращается в его исходное положение.
| WO 2006057018 A1, 01.06.2006 | |||
| ПОДСЕКАТЕЛЬ ДЛЯ ЛОВЛИ РЫБЫ В ПРОВОДКУ | 2001 |
|
RU2249951C2 |
| Прибор для измерения толщины прозрачных пластин | 1972 |
|
SU457876A1 |
| WO 2004031576 A2, 15.04.2004 | |||
| БАТОМЕТР | 1933 |
|
SU36703A1 |
| Приспособление для опоражнивания открытых котлов | 1926 |
|
SU12183A1 |

